Facoltà di Scienze della Formazione
Corso di Laurea in Politica del Territorio
Dispense del Corso
di
GEOMETRIA
(Dott. Ing. Piemonte Andrea)
Assioma: proprietà assunta come vera e fondamentale
Teorema: proprietà verificate con deduzione logica. Si distinguono:
-
IPOTESI: ciò che si suppone sopra gli elementi su cui verte il teorema
-
TESI: conclusione del teorema
-
DIMOSTRAZIONE: ragionamento logico con cui, partendo dalle ipotesi,
si giunge alla tesi
Corollario: teorema che consegue immediatamente ad un teorema o ad un assioma
LA RETTA
Assioma di appartenenza della retta: esistono sottoinsiemi propri infiniti dello spazio,
detti rette, tali che per ogni coppia di punti distinti, A e B, esiste una ed una sola retta che li
contiene.
Teorema: due rette distinte dello spazio hanno al massimo un punto in comune
Def.: tre punti appartenenti ad una stessa retta si dicono allineati.
Def.: due o più rette si dicono concorrenti se passano per uno stesso punto.
La retta è dotata di due orientamenti naturali, uno opposto all’altro che si dicono sensi o
versi della retta. Quando sopra una retta è fissato il verso positivo, si dice che la retta è
orientata.
1
Def.: Sia data una retta orientata r e sia O un qualsiasi suo punto. Si chiama semiretta di
origine O l’insieme costituito dal punto O e da tutti i punti di r che precedono oppure
seguono O nel verso fissato.
Def.: si chiama segmento di estremi A e B l’insieme costituito dai punti A e B e dai punti
della retta orientata AB compresi tra A e B.
Def.: due segmenti si dicono consecutivi quando hanno in comune soltanto un estremo.
Def.: due segmenti si dicono adiacenti quando sono consecutivi e giacciono sulla stessa
retta.
Def.: Due rette incidenti r ed s si dicono fra loro perpendicolari (od ortogonali o normali)
quando formano quattro angoli retti.
Def.: due rette complanari si dicono parallele se sono coincidenti oppure se non hanno
alcun punto in comune.
Def.: in un piano si chiama fascio di rette parallele (o fascio improprio) l’insieme di tutte
le rette del piano parallele ad una retta data.
Def.: in un piano si chiama fascio di rette proprio di centro (o sostegno) O l’insieme di
tutte le rette del piano concorrenti nel punto O.
Teorema: per un punto appartenente ad una retta passa una ed una sola retta
perpendicolare.
Teorema: in un piano, per un punto non appartenente ad una retta data, passa una ed
una sola retta perpendicolare a questa.
Def.: Si chiama distanza di un punto da una retta il segmento di retta perpendicolare
condotto dal punto alla retta.
2
Def.: in un piano si chiama simmetria di asse r (simmetria assiale) quella corrispondenza
biunivoca fra i punti del piano, la quale ad ogni punto A associa il punto A’, tale che il
segmento AA’ sia perpendicolare ad r ed il suo punto medio M stia su r.
Def.: si chiama simmetria centrale di centro O, quella corrispondenza biunivoca fra i
punti del piano, la quale ad ogni punto A associa il punto A’ del piano che appartiene alla
retta passante per O ed A ed è simmetrico di A rispetto O.
IL PIANO
Assioma di appartenenza del piano: esistono sottoinsiemi propri infiniti dello spazio,
detti piani, che godono delle seguenti proprietà:
a) per ogni terna di punti non allineati dello spazio esiste uno ed un solo piano che li
contiene;
b) se una retta ha due punti in comune con un piano, essa è inclusa nel piano.
Def.: punti e rette appartenenti al medesimo piano si dicono complanari.
Def.: si chiama fascio di rette incidenti l’insieme di tutte le rette di un piano passanti per
uno stesso punto A. Il punto A si dice centro o sostegno del fascio.
Def.: Ogni retta r di un piano divide l’insieme degli ulteriori suoi punti in due parti non
vuote. Si chiama semipiano di bordo r, l’unione di una di queste due parti con la retta r.
Def.: Si chiama figura piana convessa ogni sottoinsieme non vuoto F del piano che gode
della seguente proprietà: se due punti distinti, A e B, appartengono ad F, il segmento AB è
incluso in F.
3
ANGOLI
Def.: si chiama angolo ciascuna delle due parti in cui un piano è diviso da due semirette
aventi la stessa origine, incluse queste due semirette.
Le due semirette, appartenenti ad ambedue gli angoli, si chiamano lati dell’angolo e
l’origine comune delle due semirette si chiama vertice dell’angolo.
ˆ,
Per indicare un angolo di lati OA ed OB, si usa scrivere AÔB o più semplicemente O
oppure aˆb .
Def.: un angolo si dice convesso quando non contiene al suo interno i prolungamenti dei
lati. Un angolo si dice concavo quando contiene al suo interno il prolungamento dei lati.
Due rette che si intersecano in un punto O, dividono il piano in quattro angoli convessi.
Def.: si dice che due angoli sono opposti al vertice se i lati dell’uno sono i prolungamenti
dei lati dell’altro.
Def.: angolo PIATTO:
angolo i cui lati sono semirette opposte;
angolo GIRO:
angolo i cui lati sono semirette coincidenti e che
comprende tutti i punti del piano:
angolo RETTO:
angolo formato da due rette che intersecandosi
suddividono il piano in quattro angoli uguali;
angolo NULLO:
angolo i cui lati sono coincidenti e che non ha alcun
punto interno;
angoli CONSECUTIVI:
hanno in comune il vertice e soltanto un lato;
angoli ADIACENTI:
sono consecutivi e i lati non comuni sono l’uno il
prolungamento dell’altro (semirette opposte);
angoli COMPLEMENTARI: angoli la cui somma dà l’angolo retto;
angoli SUPPLEMENTARI: angoli la cui somma dà l’angolo piatto.
4
Unità di misura degli angoli:
Gradi sessagesimali:
1° è definito come la novantesima parte di un angolo retto
Notazione:
### ° ## ’ ##.#### ”
Angolo giro = 360°
Angolo piatto = 180°
Angolo retto = 90°
1° = 60 ‘
1 ‘ = 60 “
Gradi centesimali:
1g è definito come la centesima parte di un angolo retto
Notazione:
### g ### c ###.### cc
Angolo giro = 400 g
Angolo piatto = 200 g
Angolo retto = 100 g
1g = 100 c
1c = 100 cc
Radianti:
1 rad è definito come l’angolo al centro di una circonferenza di raggio arbitrario, che
sottende un arco di lunghezza eguale al suo raggio
π = 3.1415926535897932384626433832795 = 4·tan-1(1)
Angolo giro = 2π
Angolo piatto = π
Angolo retto = π/2
Gradi millesimali
Angolo giro = 6400°° (millesimi)
5
Trasformazioni fra unità di misura degli angoli:
(utilizzo delle proporzioni)
## ° = ## g · 10/9
(#° : 360° = #g : 400g)
## ° = ## rad · π/180
(#° : 360° = #rad : 2π)
## g = ## rad · π/200
(#g : 400g = # rad : 2π)
6
VETTORI
Ogni segmento orientato da O a P, che chiamiamo vettore applicato OP , è caratterizzato
da tre proprietà:
-
una direzione: definita dalla retta contenente O e P
-
un verso: uno dei due possibili sulla retta
-
un modulo: costituito da un numero reale non negativo che rappresenta
la lunghezza del segmento in un’opportuna unità di misura
Un vettore può essere indicato o mediante una lettera corsiva con una freccia ( v ), o
scrivendo OP , oppure con la notazione O – P, dove O indica l’origine e P il secondo
estremo del vettore.
Il modulo del vettore è indicato con ⏐ OP ⏐.
Somma di vettori
Regola del parallelogramma
Si definisce somma di due vettori u e v , applicati in un punto O, il vettore avente
direzione, verso e modulo della diagonale del parallelogramma determinato da u e v e si
indica con u + v .
7
Regola della poligonale
La somma di più vettori è data dal vettore che unisce un dato punto O con l’ultimo estremo
della linea poligonale i cui lati sono rappresentanti dei singoli vettori, e tracciati l’uno
consecutivamente all’altro, a partire dal punto O.
L’addizione fra vettori gode delle proprietà:
-
commutativa
-
associativa
-
il vettore nullo è l’elemento neutro
Differenza di vettori
Due vettori si dicono opposti quando hanno egual modulo, stessa direzione e versi
contrari. L’opposto di un vettore v si indica con - v .
Si definisce differenza di due vettori u e v , e si indica con u - v , la somma di u con
l’opposto del vettore v .
8
Prodotto di un vettore per un numero reale
Sia u un vettore non nullo ed a un numero reale diverso da 0. Si chiama prodotto del
numero a per il vettore u e si indica con a u , il vettore che ha:
-
la stessa direzione di u ;
-
il verso concorde o contrario a quello di u a seconda che il numero a sia
positivo o negativo;
-
il modulo eguale al prodotto del modulo di u per il valore assoluto di a.
9
Sistemi di riferimento
Ascisse sulla retta
Consideriamo una retta r e su di essa un punto O che chiamiamo origine, fissiamo un
verso come positivo e avremo così una retta orientata. Prendiamo poi un segmento u e lo
chiamiamo unità di misura. Ad ogni punto P della retta corrisponde la misura x del
segmento OP rispetto ad u.
Il numero x sarà positivo se P si trova sulla semiretta positiva, altrimenti sarà negativo.
Viceversa, ad ogni numero reale x corrisponderà un punto P della retta, tale che la misura
della distanza di P da O sia uguale ad x. Esiste quindi una corrispondenza biunivoca e
continua tra i punti della retta ed i numeri reali: ad ogni numero reale corrisponde uno ed
un solo punto della retta e ad ogni punto della retta corrisponte uno ed un solo numero
reale.
Def.: il rapporto
OP
= x si chiama ascissa del punto P.
u
La misura della distanza tra due punti P1 e P2 è data dal valore assoluto della differenza
algebrica tra le ascisse dei due punti: d = ⏐x2 –x1⏐.
L’ascissa del punto medio M è data da: x M =
x1 + x 2
2
Coordinate cartesiane nel piano
Fissiamo sul piano due rette orientate, non parallele. Chiamiamo origine il loro punto
d’incontro O, assi coordinati le due rette orientate e precisamente, una di esse si chiamerà
asse delle ascisse (o delle x) e l’altra asse delle ordinate (o asse y).
Preso ora un punto P qualunque del piano, da esso si conducano le parallele agli assi e
siano A e B i loro punti d’intersezione con l’asse delle x e delle y, rispettivamente.
Fissata una unità di misura, diciamo a e b, le misure dei segmenti orientati OA e OB. I due
numeri così trovati si chiamano coordinate cartesiane del punto P. In tal modo ad ogni
punto del piano abbiamo associato una coppia di numeri reali.
10
Viceversa, dati due numeri reali a e b, è sempre possibile determinare uno ed un solo
punto che abbia per ascissa a e per ordinata b. La corrispondenza dei punti del piano con
le coppie ordinate di numeri reali è quindi biunivoca.
Si osservi che un sistema di coordinate è individuato dai due assi e dall’unità di misura.
Inoltre i due assi dividono il piano in quattro angoli, o quadranti, che prendono il nome di
primo(I), secondo(II), terzo(III) e quarto(IV). Nella numerazione dei quadranti si comincia
da quello a destra in alto e si prosegue secondo il verso antiorario.
Solitamente gli assi coordinati vengono scelti ortogonali e si ha quindi un sistema di
riferimento cartesiano ortogonale.
I sistemi di riferimento sono solitamente indicati con Oxy.
Dato un sistema di riferimento è possibile individuare una simmetria assiale rispetto uno
degli assi o una simmetria centrale rispetto l’origine.
11
Fissato sul piano un sistema di assi cartesiani ortogonali, diciamo (x1,y1) e (x2,y2)
rispettivamente le coordinate di due punti P1 e P2.
Per i teorema di Pitagora applicato al triangolo P1QP2 si ha:
d(P1,P2 ) = P1P2 = (x 2 − x 1 ) 2 + (y 2 − y 1 ) 2
Volendo invece individuare le coordinate del punto medio del segmento P1P2, per il
teorema di Talete si ha che:
⎧
⎪
⎪
⎨
⎪
⎪
⎩
A 1A
AA 2
B1B
BB 2
=
=
P1M
MP2
P1M
MP2
Le coordinate del punto M risultano
quindi:
xM =
x1 + x 2
2
yM =
12
y1 + y 2
2
Elementi di TRIGONOMETRIA
Def.: un angolo si dice orientato quando è stabilito quale dei due lati deve considerarsi
come primo lato.
Def.: l’angolo orientato si dice positivo quando è descritto, a partire dal lato di origine,
mediante una rotazione antioraria attorno all’origine. L’angolo è detto negativo se la
rotazione avviene in senso orario.
Circonferenza goniometrica: è una circonferenza orientata, di raggio unitario, associata
ad un sistema di assi cartesiani ortogonali aventi per origine il centro della circonferenza
stessa. Il semiasse positivo delle x si assume come origine degli angoli e si considera
come verso positivo degli angoli quello antiorario.
Introdotta la circonferenza goniometrica si danno le seguenti definizioni:
SENO
ˆ P = HP = HP
sen α = sen AO
OA
COSENO
ˆ P = OH = OH
cos α = cos AO
OA
TANGENTE
ˆ P = AT = AT
tg α = tan AO
OA
COTANGENTE
ˆ P = BC = BC
cotg α = cotg AO
OA
13
Oltre a queste funzioni circolari ce ne sono altre due di minore importanza che qui citiamo:
OP
1
=
OH sen α
SECANTE
sec α =
COSECANTE
cosec α =
OP
1
=
HP cos α
Esaminiamo ora le principali caratteristiche delle prime quattro funzioni introdotte:
Seno
Coseno
•
− 1 ≤ sen α ≤ 1
•
è positivo nel I e nel II quadrante;
•
è positivo nel I e nel IV quadrante;
•
è negativo nel III e nel IV quadrante;
•
è negativo nel II e nel III quadrante;
•
è crescente nel I e nel IV quadrante;
•
è crescente nel III e IV quadrante;
•
è decrescente nel II e nel III
•
è decrescente nel I e nel II quadrante;
quadrante;
•
è periodico di periodo 2 π
•
•
∀α;
− 1 ≤ cos α ≤ 1
∀α;
è periodico di periodo 2 π
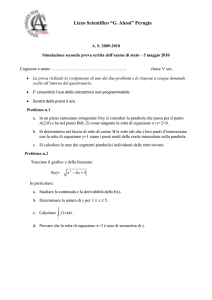
Tracciando il grafico delle funzioni y = sen (x) e y = cos (x), dove x è la misura dell’angolo
in radianti e y il corrispettivo valore della funzione goniometrica, si evidenzia come le due
siano sfasate di 90°.
14
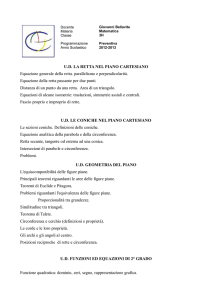
Tangente
Cotangente
•
− ∞ ≤ tg α ≤ + ∞
•
è discontinua
∀α;
•
•
(non è definita in kπ/2, k ∈ Z)
− ∞ ≤ cotg α ≤ + ∞
∀α;
è discontinua
(non è definita in kπ, k ∈ Z)
•
è positiva nel I e nel III quadrante;
•
è positiva nel I e nel III quadrante;
•
è negativa nel II e nel IV quadrante;
•
è negativa nel II e nel IV quadrante;
•
è sempre crescente;
•
è sempre decrescente;
•
è periodica di periodo π
•
è periodica di periodo π
Riportiamo i valori numerici delle funzioni fondamentali di alcuni angoli notevoli:
Angolo
in gradi
Angolo in
radianti
SEN
COS
TG
COTG
0
0
0
1
0
-
30
π/6
1
2
3
3
3
45
π/4
1
1
60
π/3
2
2
3
2
3
2
2
2
1
2
3
3
3
90
π/2
1
0
-
0
180
π
0
-1
0
-
270
3π/2
-1
0
-
0
360
2π
0
1
0
-
15
Archi associati:
Archi opposti
sen ( - α ) = - sen ( α )
cos ( - α ) = cos ( α )
tg ( - α ) = - tg ( α )
cotg ( - α ) = - cotg ( α )
Archi complementari
π
- α ) = cos ( α )
2
π
cos ( - α ) = sen ( α )
2
π
tg ( - α ) = cotg ( α )
2
π
cotg ( - α ) = tg ( α )
2
sen (
Archi supplementari
sen ( π - α ) = sen ( α )
cos ( π - α ) = - cos ( α )
tg ( π - α ) = tg ( α )
cotg ( π - α ) = cotg ( α )
16
Archi che differiscono di 90°
π
) = cos ( α )
2
π
cos ( α + ) = - sen ( α )
2
π
tg ( α + ) = - cotg ( α )
2
π
cotg ( α + ) = - tg ( α )
2
sen ( α +
Archi che differiscono di 180°
sen ( α + π ) = - sen ( α )
cos ( α + π ) = - cos ( α )
tg ( α + π ) = tg ( α )
cotg ( α + π ) = cotg ( α )
Identità fondamentali:
Da considerazioni geometriche sulla circonferenza goniometrica si ricavano alcune
relazioni fondamentali fra le funzioni goniometriche principali:
sen α + cos α = 1
2
tg α =
2
sen α
cos α
17
cotgα =
cos α
sen α
cotgα =
1
tg α
Formule di addizione e sottrazione:
sen ( α + β ) = sen ( α ) ⋅ cos ( β ) + cos ( α ) ⋅ sen ( β )
sen ( α − β ) = sen ( α ) ⋅ cos ( β ) − cos ( α ) ⋅ sen ( β )
cos ( α + β ) = cos ( α ) ⋅ cos ( β ) − sen ( α ) ⋅ sen ( β )
cos ( α − β ) = cos ( α ) ⋅ cos ( β ) + sen ( α ) ⋅ sen ( β )
tg ( α ) + tg ( β )
1 - tg ( α ) tg ( β )
tg ( α ) - tg ( β )
tg ( α - β ) =
1 + tg ( α ) tg ( β )
tg ( α + β ) =
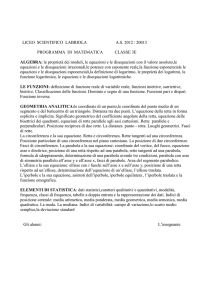
Riportiamo a titolo di esempio la dimostrazione grafica
della prima formula di addizione:
sen ( α + β ) = MQ = MR + RQ = NK + RQ =
= OK sen ( α ) + KQ cos ( α ) =
= cos ( β ) sen ( α ) + sen ( β ) cos ( α )
Formule di duplicazione:
sen ( 2α ) = 2 sen ( α ) ⋅ cos ( α )
cos ( 2α ) = cos 2 ( α ) - sen 2 ( α )
2 tg ( α )
tg ( 2α ) =
1 - tg 2 ( α )
cotg ( 2α ) =
cos (
α
1 + cos ( α )
)= ±
2
2
sen (
α
1 - cos ( α )
)= ±
2
2
tg (
cotg 2 ( α ) - 1
2 cotg ( α )
α
1 - cos ( α )
)= ±
2
1 - sen ( α )
Si ricavano dall’equazione fondamentale
Si ricavano dalle formule di addizione
e dalle formule di duplicazione del coseno
Formule di bisezione:
18
Funzioni goniometriche inverse
Limitando opportunamente i campi di esistenza delle quattro funzioni goniometriche
fondamentali è possibile ricavare le relative funzioni inverse. Si ricorda infatti che le
funzioni periodiche non sono invertibili su tutto il loro dominio.
Arcoseno
( sen-1 )
Convenzionalmente si considera di limitare il
campo di esistenza della funzione y = sen ( x )
all’intervallo chiuso [ - π/2 , π/2 ], in cui risulta
invertibile.
A lato è riportato il grafico della funzione inversa
x = sen-1 ( y )
Arcocoseno
( cos-1 )
Convenzionalmente si considera di limitare il
campo di esistenza della funzione y = cos ( x )
all’intervallo chiuso [ 0 , π ], in cui risulta invertibile.
A lato è riportato il grafico della funzione inversa
x = cos-1 ( y )
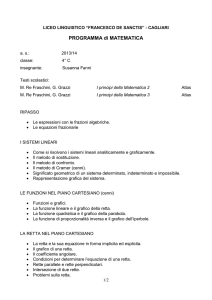
Arcotangente
( tg-1 )
Convenzionalmente si considera
di limitare il campo di esistenza
della funzione y = tg ( x )
all’intervallo aperto ] - π/2 , π/2 [,
in cui risulta invertibile.
A lato è riportato il grafico della
funzione inversa
x = tg-1 ( y )
NOTA: Generalmente le funzioni inverse vengono assegnate con la solita notazione y = f(x),
che preferisce indicare con x la variabile indipendente e con la y la dipendente.
19
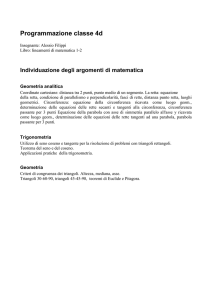
Relazioni fra angoli e lati di un triangolo rettangolo
Ricordando le definizioni delle funzioni goniometriche si ha che:
c = a sen γ
b = a cos γ
b = a sen β
c = a cos β
Pertanto risulta che in un triangolo rettangolo la misura di un cateto è data dal prodotto
della misura dell’ipotenusa per il seno dell’angolo opposto, oppure per il coseno
dell’angolo adiacente ad esso.
Si possono anche ricordare le relazioni che riguardano la tangente:
c = b tg γ
b = c tg β
Teoremi sul triangolo qualunque
Teorema dei seni: in ogni triangolo i lati sono proporzionali ai seni degli angoli opposti.
a
b
c
=
=
sen α sen β sen γ
20
Teorema delle proiezioni: in ogni triangolo un lato è uguale alla somma dei prodotti degli
altre due per il coseno dell’angolo che essi formano con il primo lato.
a = b cos γ + c cos β
b = c cos α + a cos γ
c = a cos β + b cos α
Teorema di Carnot (o del coseno): in ogni triangolo il quadrato di un lato è uguale alla
somma dei quadrati degli altri due, diminuita del doppio prodotto di questi per il coseno
dell’angolo da essi formato.
a2 = b2 + c2 – 2bc cos α
b2 = c2 + a2 – 2ca cos β
c2 = a2 + b2 – 2ab cos γ
21
Prodotto fra vettori
Precedentemente abbiamo visto come un vettore possa essere moltiplicato per uno
scalare. Introdurremo ora il prodotto fra vettori, che può essere di due tipi:
-
Prodotto scalare
-
Prodotto vettoriale
Prodotto scalare
Dati due vettori u e v , il prodotto scalare di u per v è uno scalare, si indica con u ⋅ v ed
è così definito:
r r r r
v ⋅ u = v ⋅ u ⋅ cos(vˆu)
v
uv
u
Se due vettori sono ortogonali il loro prodotto scalare è quindi nullo.
Eseguendo il prodotto scalare di un vettore per un versore otteniamo la componente del
vettore lungo la direzione individuata dal versore.
v
uv
u
r
v cos (uv)
Se u è un vettore, i coseni degli angoli che u forma con i versori degli assi si dicono
coseni direttori di tale vettore.
22
Prodotto vettoriale
Dati due vettori u e v , il prodotto vettoriale di u per v è un vettore. Esso si indica con
u ∧ v ed è così definito:
Modulo:
Direzione:
Verso:
r r r r
v ∧ u = v ⋅ u ⋅ sen(vˆu)
La direzione di w = u ∧ v è ortogonale al piano individuato da u e v
e passante per O, dove u = P-O e v = Q-O.
E’ tale da vedere u percorrere l’angolo u^v in senso antiorario (regola
della mano destra o del cacciavite).
w=u v
Q
v
O
uv
u
P
Il prodotto scalare di due vettori può essere espresso anche tramite una notazione che qui
riportiamo ma che sarà chiarita in seguito.
r
i
r r
u ∧ v = ux
vx
23
r
j
uy
vy
r
k
uz
vz
Trasformazioni di coordinate
Il problema della trasformazione di coordinate cartesiane consiste nell’esprimere le
coordinate di un punto P rispetto ad un dato sistema Oxy per mezzo delle coordinate dello
stesso punto riferite ad un nuovo sistema di assi O’XY.
Considereremo due casi:
-
Traslazione degli assi
Rotazione degli assi
Traslazione degli assi
Consideriamo l’asse X parallelo ed equiverso all’asse x e l’asse Y parallelo ed equiverso
all’asse y.
In questo caso perché il nuovo sistema O’XY sia individuato rispetto al vecchio sistema
Oxy, basta conoscere le coordinate (a,b) del punto O’ rispetto al vecchio sistema Oxy.
Premesso ciò, sia P un punto qualunque del piano le cui coordinate, rispetto ai vecchi assi
x e y, indichiamo con (xP,yP), mentre indichiamo con (XP,YP) quelle rispetto ai nuovi assi
X,Y.
Dalla figura si deduce immediatamente come:
⎧x P = X P + a
⎨
⎩y P = YP + b
Oppure:
⎧XP = x P − a
⎨
⎩YP = y P − b
Quelle sopra riportate sono le formule che permettono di trasformare le coordinate di un
punto generico da un sistema di riferimento ad un altro nel caso di assi paralleli ed
equiversi.
Rotazione degli assi
24
Consideriamo due sistemi di assi ortogonali che abbiano la stessa origine e sia il secondo
sistema ottenuto dal primo mediante una rotazione attorno ad O di un certo angolo α.
Supponiamo inizialmente che l’angolo di rotazione α fra i due sistemi sia acuto e positivo e
consideriamo un punto che si trova nel primo quadrante di entrambi i sistemi di riferimento.
Dalla figura si ricava che:
x P = OP1 , y P = P1P , X P = OP 2 , YP = P2P
ed inoltre, per la similitudine dei triangoli, si ha che:
ˆX=α
P2Pˆ Q = xO
Per le note relazioni di trigonometria applicate ai triangoli OMP2 e P2QP, si ha che:
OM = X P cosα
P1Q = MP 2 = X P senα
P1M = QP 2 = YP senα
QP = YP cosα
Da cui:
⎧ OP 1 = OM − P1M
⎪
⎨
⎪⎩ P1 P = P1Q + QP
⇒
⎧x P = X P cosα − YP senα
⎨
⎩y P = X P senα + YP cosα
L’ultimo sistema scritto permette di passare dalle coordinate del sistema OXY a quelle del
sistema Oxy.
Risolvendo il sistema rispetto X e Y si ottengono delle equazioni simili alle precedenti per
la trasformazione inversa:
25
⎧ X P = x P cosα + y P senα
⎨
⎩YP = − x P senα + y P cosα
Rototraslazione degli assi
Il caso più generale di trasformazione di coordinate cartesiane prevede la possibilità di
avere contemporaneamente una rotazione degli assi ed una traslazione dell’origine degli
stessi.
Y
y
X
b
O
O’
α
a
x
Il sistema di equazioni che rappresentano questo caso risulta una combinazione dei due
sistemi visti per i due casi precedenti:
⎧x P = a + X P cosα − YP senα
⎨
⎩y P = b + X P senα + YP cosα
⎧ X P = ( x P - a)cosα + ( y P - b)senα
⎨
⎩YP = −( x P - a)senα + ( y P - b)cosα
Coordinate polari
Oltre ai sistemi di riferimento cartesiani, introdotti in precedenza, è possibile definire un
altro sistema, utilizzato per determinare la posizione di un punto nel piano ed utile in molte
applicazioni: il sistema di coordinate polari.
Sul piano si fissi un punto O, detto polo, una retta orientata x passante per O, detta asse
polare ed il verso antiorario come verso positivo delle rotazioni.
26
P
ρ
ϑ
x
O
Ciò posto, la posizione di un qualsiasi punto P del piano può essere determinato per
mezzo di due numeri, detti appunto coordinate polari del punto P:
- ρ (modulo): distanza positiva del punto P dal polo;
- ϑ (anomalia o angolo polare): angolo formato dal segmento OP con
l’asse polare.
Consideriamo ora il sistema di assi cartesiani ortogonali Oxy e il sistema polare che abbia
O come polo ed x come asse polare. Sia P un punto qualsiasi del piano ed indichiamo con
(xP,yP) e (ρP,ϑP) rispettivamente le coordinate cartesiane e polari di questo punto.
y
y
P
P
ρ
x
P
ϑ
x
O
Le relazioni che legano le due coordinate si ricavano immediatamente dalla figura e sono:
⎧x = ρcosϑ
⎨
⎩y = ρsenϑ
Oppure, per le trasformazioni inverse:
⎧ρ = x 2 + y 2
⎪
x
⎨
⎪cosϑ =
2
x + y2
⎩
27
Equazione della RETTA
Ogni retta è rappresentata da un’equazione di primo grado in due variabili.
ax + by + c = 0
Se la retta non passa per 0 e non è parallela agli assi, si ha che a ≠ 0, b ≠ 0 e c ≠ 0.
Dividendo quindi per c si ottiene l’equazione segmentarla della retta:
x y
+ =1
p q
p=−
,
c
a
q=−
c
b
Dall’equazione, scritta in questa forma, si ricavano immediatamente i punti (0,q) e (p,0),
intersezione della retta con gli assi.
Se b ≠ 0 l’equazione può scriversi sotto la forma, cosiddetta esplicita (o ridotta):
y = mx + q
,m=-
a
b
q=-
c
b
dove m viene detto coefficiente angolare e q è l’intercetta della retta sull’asse delle
ordinate.
Andiamo ora ad analizzare il significato geometrico del coefficiente angolare. Sulla retta di
equazione y = mx + q consideriamo due punti qualsiasi P1 (x1,y1) e P2 (x2,y2). Si ha allora:
α
28
y 1 = mx 1 + q ⎞
⎟
y 2 = mx 2 + q ⎟⎠
⇒
y 1 - y 2 = m (x 1 - x 2 )
Risulta quindi:
m=
y1 − y 2
= tgα
x1 − x 2
Il coefficiente angolare è in definitiva una “misura” dell’inclinazione della retta: più grande è
m in valore assoluto, più grande è l’angolo che la retta forma con l’asse x.
Possiamo elencare alcuni casi particolari di rette:
y
c
d
O
⇒
⇒
⇒
⇒
- Retta coincidente con l’asse x
- Retta parallela all’asse x
- Retta coincidente con l’asse y
- Retta parallela all’asse y
x
y=0
y–c=0
x=0
x–d=0
Retta per due punti
Dati due punti P0 (x0,y0) e P1 (x1,y1), la retta passante per questi punti ha equazione:
x − x0
y − y0
=
x1 − x 0 y1 − y 0
Ortogonalità e parallelismo
Date due rette r ed r’ di equazione, rispettivamente, y = mx + q e y = m’x + q’, si ha che:
r parallela ad r’
⇒
m = m’
r ortogonale ad r’
⇒
m=−
29
1
m'
Fascio proprio di rette
Si dice fascio proprio di rette l’insieme di tutte e sole le rette di un piano che hanno uno
stesso punto in comune, detto centro del fascio.
Siano date due rette r ed r’.
r
r’
⇒
⇒
ax + by + c = 0
a’x + b’y + c’ = 0
Se le due rette non sono parallele, allora hanno un punto in comune, che indichiamo con
C. L’equazione di una retta appartenente al fascio proprio di centro C, può essere scritta
sotto forma di combinazione lineare delle equazioni delle due rette distinte del fascio, r ed
r’.
L’equazione del fascio proprio sarà dunque:
, k,k’ ∈ ℜ
k (ax + by + c) + k’ (a’x + b’y + c’) = 0
Oppure, per k e k’ non entrambi nulli, si può scrivere:
ax + by + c + t (a’x + b’y + c’) = 0
, t = k’/k
Fascio improprio di rette
Si dice fascio improprio di rette l’insieme delle rette di un piano parallele ad una retta data.
Sia data una retta r:
r
⇒
ax + by + c = 0
L’equazione del fascio improprio sarà:
,k∈ℜ
ax + by + k = 0
Rette per un punto
Sia posto il problema di scrivere l’equazione del fascio di rette proprio di centro P1 (x1,y1).
Si può procedere osservando che a questo fascio apparterranno sicuramente le due rette,
parallele rispettivamente all’asse x e all’asse y, di equazione x – x1 = 0 e y – y1 = 0.
L’equazione del fascio può dunque essere scritta come combinazione lineare di queste
due:
k (x – x1) + k’ (y – y1) = 0
oppure
y – y1 = m (x – x1)
Retta passante per un punto e parallela ad una retta data
Consideriamo un punto P1 (x1,y1) ed una retta r di equazione ax + by +c = 0. Si vuole
determinare l’equazione della retta parallela ad r e passante per P1. La retta cercata ha
equazione:
a ( x – x1) + b ( y – y1) = 0
30
Retta passante per un punto ed ortogonale ad una retta data
Consideriamo un punto P1 (x1,y1) ed una retta r di equazione ax + by +c = 0. Si vuole
determinare l’equazione della retta parallela ad r e passante per P1. La retta cercata ha
equazione:
b ( x – x1) - a ( y – y1) = 0
Distanza punto – retta
Consideriamo un punto P1 (x1,y1) ed una retta r di equazione ax + by +c = 0. Si vuole
determinare la distanza del punto dalla retta: ⏐ P1 H ⏐.
Passo 1
Scriviamo innanzitutto la retta r’, passante per P1 ortogonale ad r:
r’
⇒
b ( x – x1) - a ( y – y1) = 0
Passo 2
Troviamo il punto di intersezione fra r ed r’, risolvendo il seguente sistema:
⎧ b(x − x 1 ) − a(y − y 1 ) = 0
⎨
⎩ ax + by + c = 0
Osserviamo che:
ax + by + c = a (x-x1) + b (y – y1) + ax1 + by1 + c
Il sistema diventa dunque:
b
⎧
⎪ (y − y 1 ) = (x − x 1 )
a
⎨
⎪⎩ a(x - x 1 ) + b(y - y 1 ) + ax 1 + by 1 + c = 0
31
Dal sistema ricaviamo quindi le coordinate del punto H:
a
⎧
⎪⎪x = a 2 + b 2 (ax 1 + by 1 + c) + x 1
⎨
⎪y = − b (ax + by + c) + y
1
1
1
⎪⎩
a2 + b2
Passo 3
Trovo la distanza fra i due punti P1 ed H:
P1 H
2
= ( x − x1 ) 2 + ( y − y1 ) 2 =
b2
a2
2
(ax 1 + by 1 + c) 2
(ax
by
c)
+
+
+
1
1
2
2 2
2
2 2
(a + b )
(a + b )
Ricaviamo dunque la formula finale che dato un punto P1 (x1,y1) ed una retta r di
equazione ax + by +c = 0, ci permette di ricavare direttamente la loro distanza:
d ( P1 , r ) = P1 H =
ax1 + by1 + c
a2 + b2
Le coniche
Siano a una retta dello spazio, ed r un’altra retta che incontri la prima in un punto V,
formando con essa un angolo α minore di 90°.
Si definisce superficie conica quella superficie generata in una rotazione completa di una
retta r, detta generatrice, attorno ad una retta a, detta asse. α è detta apertura della
superficie conica e V il vertice.
Si chiamano coniche le intersezioni ottenute tagliando la superficie conica con un piano.
Le sezioni risultanti sono diverse a seconda della posizione e dell’inclinazione del piano
secante.
32
1 – Se il piano secante è perpendicolare all’asse a, la sezione è una circonferenza (essa
degenera in un punto se il piano passa per V).
2 – Se il piano secante forma con l’assa a un angolo maggiore dell’angolo α di apertura
della superficie conica, e diverso da 90°, la sezione è un’ellisse.
3 – Se il piano secante è parallelo alla generatrice r, esso taglierà una sola falda della
superficie conica e la sezione si chiama parabola (essa degenera in due rette coincidenti
se il piano passa per V).
4 – Se il piano secante è parallelo all’asse a, la sezione è un’iperbole, formata da due
rami, uno per ciascuna falda (essa degenera in una coppia di rette incidenti se il piano
passa per V).
CIRCONFERENZA
Def. Si chiama circonferenza il luogo geometrico dei punti del piano equidistanti da un
punto fisso, detto centro.
Dato Oxy ed un punto C (α,β), la circonferenza di centro C e raggio r è il luogo dei punti P
(x,y) tali che:
2
PC = r 2 = (x − α) 2 + (y − β) 2
Se C ≡ O allora l’equazione diventa:
Equazione cartesiana della circonferenza
x2 + y2 = r2
Sviluppando l’equazione cartesiana scritta sopra otteniamo:
r2 = x2 - 2αx + α2 + y2 - 2βy + β2
Da cui ricaviamo un’altra equazione rappresentativa della circonferenza:
⎞
⎟
2
2
⎟ ⇒ x + y + ax + by + c = 0
⎟
α2 + β2 − r 2 = c ⎠
− 2α = a
− 2β = b
Equazione normale della circonferenza
Una circonferenza è dunque rappresentata da un’equazione algebrica di 2° grado, nelle
variabili x e y, con i coefficienti di x2 e y2 uguali tra loro.
33
E’ possibile trovare l’equazione anche nella forma:
kx2 + ky2 + kax + kby + kc = 0
Equazione generale della circonferenza
Consideriamo nuovamente l’equazione normale della circonferenza e completiamo i
quadrati suggeriti nel primo membro.
x2 + ax + y2 + by = - c
a2
b2 a2 b2
2
2
x + ax +
+ y + by +
=
+
−c
4
4
4
4
2
2
a⎞ ⎛
b⎞
a2 b2
⎛
x
y
=
+
−c
+
+
+
⎟
⎜
⎟ ⎜
2⎠ ⎝
2⎠
4
4
⎝
Da questo risultato deduciamo che l’equazione x2 + y2 + ax + by + c = 0 rappresenta una
circonferenza solo se:
2
2
⎛a⎞ ⎛b⎞
⎜ ⎟ +⎜ ⎟ −c > 0
⎝2⎠ ⎝2⎠
⎛ a b⎞
Se ciò è verificato, le coordinate del centro della circonferenza sono ⎜ − ,− ⎟ ed il raggio
⎝ 2 2⎠
2
2
⎛a⎞ ⎛b⎞
è r = ⎜ ⎟ +⎜ ⎟ −c .
⎝2⎠ ⎝2⎠
Possiamo elencare alcuni casi di circonferenze particolari.
Se c = 0
Se a = 0
Se b = 0
Se a = b = 0
⇒
⇒
⇒
⇒
circonferenza che passa per l’origine
circonferenza con centro sull’asse y
circonferenza con centro sull’asse x
circonferenza con centro C ≡ O
Infine ricordiamo che è possibile descrivere una circonferenza tramite un’equazione, detta
parametrica.
y
P (x,y)
r
⎧x = α + rcost
⎨
⎩y = β + rsent
t
C (α,β)
O
x
34
Intersezione di una circonferenza con una retta
Per studiare le varie posizioni che può assumere una retta r, rispetto ad una circonferenza,
basta risolvere il sistema formato dalle equazioni della circonferenza e della retta.
⎧x 2 + y 2 + ax + by + c = 0
⎨
⎩a' x + b' y + c' = 0
Sia ∆ il discriminante dell’equazione di 2° grado risolutiva. Allora la retta si potrà trovare,
rispetto alla circonferenza, nelle seguenti posizioni:
Se ∆ > 0
Se ∆ = 0
Se ∆ < 0
⇒
⇒
⇒
la retta risulta secante la circonferenza
la retta risulta tangente alla circonferenza
la retta risulta esterna alla circonferenza
ELLISSE
Def. Si chiama ellisse il luogo geometrico dei punti del piano per i quali è costante la
somma delle distanze da due punti fissi, detti fuochi.
Indichiamo con 2a la somma costante di un punto P dell’ellisse dai due fuochi F ed F’, e
con 2c la distanza dei fuochi.
Per determinare l’equazione cartesiana dell’ellisse, assumiamo come asse x la retta
contenente il segmento FF’ e come asse delle y la perpendicolare a questo, passante per
il suo punto medio. Le coordinate dei fuochi F’ ed F sono, rispettivamente, (-c,0) e (c,0).
Perché un punto P (x,y) appartenga all’ellisse deve essere:
PF ' + PF = 2a
Che secondo la formula della distanza fra due punti diventa:
( x − c )2 + y 2
+
( x + c )2 + y 2
= 2a
Questa è, in forma irrazionale, l’equazione dell’ellisse. Razionalizziamola.
35
(x − c )2 + y 2
⎛⎜
⎝
(x + c )2 + y 2
= 2a −
(x − c )2 + y 2 ⎞⎟
2
(x + c )2 + y 2 ⎞⎟
= ⎛⎜ 2a −
⎠
⎝
2
⎠
(x − c )2 + y 2 = 4a 2 − 4a (x + c )2 + y 2 + (x + c )2 + y 2
a x 2 + c 2 + 2cx + y 2 = a 2 + cx
(a
x 2 + c 2 + 2cx + y 2
)
(
2
= a 2 + cx
)
2
a 2 x 2 + a 2 c 2 + 2a 2 cx + a 2 y 2 = a 2 a 2 + 2a 2 cx + c 2 x 2
(a
2
)
(
− c 2 x 2 + a2 y 2 = a2 a2 − c 2
)
Si osservi ora che deve essere verificato che 2a > 2c e cioè che a > c. La quantità (a2 - c2)
risulta quindi anch’essa positiva e può essere posto a2 - c2 = b2.
L’equazione diventa quindi:
b2x2 + a2y2 = a2b2
E dividendo tutto per a2b2 si ottiene:
x2 y2
+
=1
a2 b2
Equazione canonica (o normale) dell’ellisse
Proprietà dell’ellisse
Poiché l’equazione dell’ellisse contiene solo potenze pari della x e della y, ne consegue
che se il punto (x1,y1) appartiene all’ellisse, allora vi appartengono anche i punti (x1,-y1),
(-x1,y1), (-x1,-y1). Perciò si può affermare che l’ellisse è una curva simmetrica rispetto agli
assi coordinati e rispetto l’origine.
I segmenti AA’ e BB’ vengono detti, rispettivamente, asse maggiore ed asse minore
dell’ellisse ed O viene detto centro dell’ellisse.
I punti A, A’, B, B’ si dicono vertici dell’ellisse e la retta passante per i due fuochi F ed F’,
asse focale.
36
L’ellisse è contenuta nella regione del piano delimitata dalle rette di equazione:
x = -a,
x = a,
y = -b,
y=b
dove a è la misura del semiasse maggiore e b quella del semiasse minore.
Eccentricità dell’ellisse
Per una ellisse il rapporto
e=
c
a
è compreso fra 0 ed 1 (nullo per la circonferenza), si chiama eccentricità dell’ellisse e si
può assumere come la misura di quanto l’ellisse, per la sua forma più o meno allungata,
differisce dalla circonferenza.
Ellisse traslata
Y
y
q
X
O’
p
O
x
Consideriamo l’equazione:
( x − p )2 + ( x − q )2
a2
b2
=1
Essa rappresenta un’ellisse traslata secondo il cambio di coordinate:
⎧X = x − p
⎨
⎩Y = y − q
Utilizzando il sistema di riferimento O’XY l’ellisse soddisferà l’equazione “canonica”:
X2 Y2
+
=1
a2 b2
Infine ricordiamo che è possibile descrivere un’ellisse tramite un’equazione, detta
parametrica.
37
y
P (x,y)
b
a
ϕ
⎧x = x C + acosϕ
⎨
⎩y = y C + bsenϕ
C (x ,y )
C
C
O
x
PARABOLA
Def. Si dice parabola il luogo geometrico dei punti del piano equidistanti da un punto fisso
F, detto fuoco e da una retta fissa, detta direttrice.
Per ottenere l’equazione che descrive la parabola introduciamo un sistema di riferimento.
Assumiamo come asse y la perpendicolare alla direttrice d, passante per F e scegliamo
l’origine O equidistante da d ed F; sia infine l’asse x parallelo a d.
Poniamo:
QF = 2 p
Le coordinate del fuoco sono allora (0,p) e la direttrice ha equazione y+d = 0.
Un punto P (x,y) appartiene alla parabola se FP = d ( P, d ) = PH , cioè:
x 2 + (y − p) = y + p
2
y=
\ elevo al quadrato entrambi i membri
1 2
x
4p
Posto a =
1
si ottiene:
4p
y = ax 2
Equazione canonica (o normale) della parabola
38
La parabola di equazione y=ax2 ha per asse di simmetria l’asse y, il fuoco F sta sull’asse y
1 ⎞
1
⎛
ed il vertice si trova
e le sue coordinate sono ⎜ 0 ,
⎟ . La direttrice ha equazione y = −
4a
⎝ 4a ⎠
nell’origine degli assi.
Parabola traslata
Consideriamo l’equazione y = ax2 + bx + c con a, b, c costanti arbitrarie (a ≠ 0).
Verifichiamo che essa rappresenta una parabola.
b2
\+
4a
2
y = ax + bx + c
y+
b2
b2
− c = ax 2 + bx +
4a
4a
Poniamo ∆ = b2 – 4ac:
y+
b ⎞
∆
⎛
= a⎜ x +
⎟
2a ⎠
4a
⎝
2
∆⎞
⎛ b
,− ⎟ :
Eseguiamo ora una traslazione d’assi portando l’origine nel punto O’ ⎜ −
⎝ 2a 4a ⎠
b
⎧
⎪⎪x = X − 2a
⎨
⎪y = Y − ∆
4a
⎩⎪
L’equazione della curva nel sistema O’XY diventa:
Y = aX2
Tale curva è una parabola con vertice in (X=0,Y=0); ha come asse di simmetria la retta di
1 ⎞
1
⎛
equazione X=0, fuoco in ⎜ X = 0, Y =
.
⎟ e per direttrice la retta Y = −
4a ⎠
4a
⎝
39
∆⎞
⎛ b
,−
Dunque l’equazione y = ax2 + bx + c rappresenta una parabola con vertice in ⎜ −
⎟,
⎝ 2a 4a ⎠
∆⎞
b
⎛ b 1
−
,
asse di simmetria la retta di equazione x = −
, fuoco in ⎜ −
⎟ e la cui
2a
⎝ 2a 4a 4a ⎠
1
∆
−
.
direttrice ha equazione y = −
4a 4a
In particolare si possono distinguere due casi a seconda del segno del coefficiente del
termine di secondo grado:
- Se a > 0
⇒
Si dice che la parabola rivolge la concavità verso l’alto ed il suo
vertice costituisce un punto di minimo.
- Se a < 0
⇒
Si dice che la parabola rivolge la concavità verso il basso ed il
suo vertice costituisce un punto di massimo.
In un piano cartesiano anche l’equazione x = ay2 rappresenta una parabola. Essa avrà per
⎛ 1 ⎞
asse di simmetria l’asse x, il fuoco sull’asse x e di coordinate ⎜ ,0 ⎟ e la direttrice di
⎝ 4a ⎠
1
; il vertice è posto nell’origine degli assi.
equazione x = −
4a
40
IPERBOLE
Def. Si dice iperbole il luogo geometrico dei punti del piano per i quali è costante la
differenza delle distanze da due punti fissi, detti fuochi.
x2 y2
−
=1
a2 b2
b
⎞
x ⎟
a
⎟
b ⎟
y = − x⎟
a ⎠
Equazione canonica (o normale) dell’iperbole
y=
Asintoti dell’iperbole
Se a = b l’equazione diventa x2 - y2 = a2 e l’iperbole è detta equilatera. In questo caso gli
asintoti risultano ortogonali fra loro.
Funzione OMOGRAFICA
y=
ax + b
cx + d
L’equazione sopra scritta identifica l’iperbole equilatera di asintoti x = −
41
d
c
e
y=
a
.
c