Matteo Moda
Geometria e algebra lineare
Coniche
Coniche
Equazioni coniche legate a matrici simmetriche: ܽ ݔଶ + ܾ ݕଶ + ܿ ݕݔ+ ݀ ݔ+ ݁ ݕ+ ݂ = 0
ݔ
ܽ ܿ/2 ݔ
Con le matrici: ሾݕ ݔሿ
൨ ቂݕቃ + ቂݕቃ ሾ݀ ݁ሿ + ݂ = 0 (@)
ܿ/2 ܾ
ܿ
ܿ
ܿ
ܿ
ݔ
ݔ+ ܾݕቃ ቂݕቃ = ܽ ݔଶ + ݕݔ+ ݕݔ+ ܾ ݕଶ
ቂܽ ݔ+ ݕ
2
2
2
2
ܽ
ܿ/2 ݀/2
ܽ ܿ/2
ܾ
݁/2 ൩ con la matrice A =
Matrici compatta delle coniche: ܿ/2
൨ matrice
ܿ/2 ܾ
݀/2 ݁/2
݂
simmetrica e X = ሾݕ ݔሿ e B = ሾ݀ ݁ሿ ݁ ݂ = ܥ. Allora l’equazione (@) si può riscrivere nella forma:
ܺ ் ܺܣ+ ܺ ்ܤ+ = ܥ0
Conica: è l’insieme C dei punti di R2 le cui coordinate x1, x2 soddisfano un’equazione di secondo
grado con coefficienti reali, del tipo:
݂ሺݔଵ , ݔଶ ሻ = ܽଵଵ ݔଵଶ + ܽଶଶ ݔଶଶ + 2ܽଵଶ ݔଵ ݔଶ + 2ܽଵଷ ݔଵ + 2ܽଶଷ ݔଶ + ܽଷଷ = 0
Oppure nella forma:
ݔ1
ݔ1
݂ሺݔଵ , ݔଶ ሻ = ܺ ் ܺܣ+ 2 ܺ ்ܤ+ = ܥ0 con ܺ = ቂ ቃ nel piano; ܺ = ݔ2൩ ݈݈݊݁݅ݖܽݏ
ݔ2
1
ܿ ݁݊݅݀ݎ ݅݀ ܣ ݊2 ݁ ܽܿ݅ݎݐ݁݉݉݅ݏÃ ݀݅ ݁݊݅݀ݎ3 ܽܿ݅ݎݐ݁݉݉݅ݏ
Invarianti ortogonali:
♠ L’invariante cubico è il determinante della matrice à di ordine 3 ሺܫଷ = det à ሻ
♠ L’invariante quadratico è il determinante della matrice A di ordine 2 (ܫଶ = det ܣሻ
♠ L’invariante lineare è uguale alla traccia di A ሺܫଵ = ܣ ݎݐሻ
Traccia di A: Data una matrice quadrata = ܣሾܽ ሿ si definisce traccia di A la somma dei coefficienti
della diagonale della matrice, cioè: ܽ = ܣ ݎݐଵଵ + ܽଶଶ + ⋯ + ܽ
Esempio
௫మ
௬మ
Considero la generica equazione dell’iperbole: మ − మ − 1 = 0
1/ܽଶ
0
0
ଶ
Considero la matrice à = 0
−1/ܾ
0 associata all’equazione dell’iperbole.
0
0
−1
Voglio calcolare i tre invarianti. Avremo:
ܫଷ = 1/ሺܽଶ ܾ ଶ ሻ
ܫଶ = −1/ሺܽଶ ܾଶ ሻ
1
ܫଵ = − ଶ + 1/ܽଶ
ܾ
1
Matteo Moda
Geometria e algebra lineare
Coniche
Classificazione delle coniche
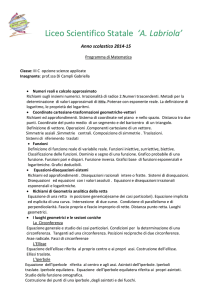
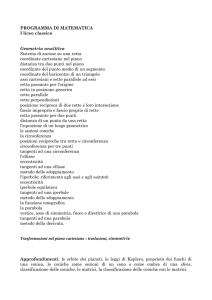
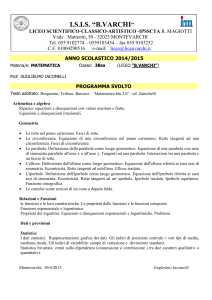
Tipi di sezioni coniche: i piani,
intersecando il cono, descrivono
descrivon
una circonferenza (in giallo),
un'ellisse
(in
rosso),
una
parabola (in blu) e un'iperbole
(in verde)
In base a quanto detto sugli invarianti, è possibile classificare le coniche, e quindi stabilire se una curva sia
un'ellisse, una parabola o un'iperbole, tramite la seguente distinzione:
se
la conica è degenere e in particolare:
se
se
se
se
, si riduce a due rette reali distinte
, si riduce a
♠ coppia di rette reali distinte parallele oppure complesse coniugate senza punti
comuni (rango matrice completa =2)
♠ coppia di rette reali coincidenti (rango matrice completa =1)
, si riduce a due rette immaginarie coniugate.
la conica non è degenere ed in particolare:
è un'iperbole equilatera se
e
è un'iperbole non equilatera se
è una parabola se
,
ma
,
2
,
Matteo Moda
Geometria e algebra lineare
è un'ellisse reale se
è un'ellisse immaginaria se
e
Coniche
,
ma
.
Ad esempio, la conica di equazione:
, avendo
e
degenere in due rette reali distinte:
e
(testo tratto da Wikipedia).
In particolare se ܫଷ = 0 % ,-+* Ã 0, %%&+ A+ò @ +-- *$*$-*
, è una conica
Coordinate omogenee nello spazio
Dato un punto proprio (x,y,z), moltiplicando tali coordinate per un valore u diverso da 0 avrò:
(ux,uy,uz)
Dato un punto improprio (direzione) (a,b,c) -> (a,b,c,0) ->> (a,b,c) diverso da 0
Applico le considerazioni fatte precedentemente alle seguenti equazioni:
♠ ) 0 &$ 0, 0, )0!
♠ ) @ 0 &$ &, &, )&, 1!
Se u=0 -> ) 0 (+&&--& '%+! → (-& (+&(+*&
Date (a,b,c) coordinate di un vettore su un piano, se a=b=c=0 -> du=0 ->u=0
>u=0 => luogo di tutte le
direzioni (piano improprio)
(a,b,c)
(x,y,z)
3