IVAN CERVESATO
CONICHE
Indice
§ 1. Curve algebriche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 3
1.1 Coniche degeneri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Intersezioni retta-conica e conica-conica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
§ 2. Riconoscimento di una conica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
§ 3. Riduzione di una conica traslata in forma canonica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.1 Coniche a centro: ellisse e iperbole . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.2 Coniche non a centro: parabola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
§ 4. Riduzione di una conica rototraslata in forma canonica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4.1 Coniche a centro: ellisse e iperbole . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
4.2 Coniche non a centro: parabola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
§ 5. Fasci di coniche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
§ 6. Bibliografia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Coniche
3
§1. Curve algebriche
Sia dato, nel piano, un sistema di riferimento cartesiano ortogonale xOy. In generale, se f (x, y) rappresenta
un polinomio di grado n, il luogo geometrico dei punti che soddisfano alla condizione f (x, y) = 0 si dice curva
algebrica di ordine n: l’ordine di una curva algebrica rappresenta il numero di punti che essa ha in comune
con una generica retta.
In particolare, se n = 2, il luogo geometrico è detto conica (curva algebrica di ordine 2). L’equazione più
generale di una conica risulta pertanto
Ax2 + Bxy + Cy 2 + Dx + Ey + F = 0
(1.1)
dove alcuni dei coefficienti (reali1 ) potrebbero anche annullarsi: noi supporremo comunque che A, B, C non
siano contemporaneamente nulli, nel qual caso la (1.1) si ridurrebbe ad un’equazione di primo grado.
Il termine in xy è detto termine rettangolare.
§1.1 Coniche degeneri
Diamo la seguente
Definizione 1.1 Una conica si dice degenere (o anche riducibile o spezzata) se si spezza nel prodotto di due
rette (che potranno essere reali o no).2
Il significato di questa definizione risulterà chiarito dai seguenti esempi.
Esempio 1.1 La conica di equazione x2 − y 2 − x + y = 0 è degenere in quanto, come si verifica subito, essa si
può porre nella forma x2 − y 2 − x + y = (x + y − 1)(x − y) = 0: pertanto, poiché il polinomio che rappresenta
la conica può essere fattorizzato nel prodotto di due polinomi di I grado, la conica risulta “spezzata” nel
prodotto delle due rette (reali) di equazioni x + y − 1 = 0 e x − y = 0.
Esempio 1.2 Anche la conica x2 + 4 = 0 risulta degenere, in quanto x2 + 4 = (x + 2i)(x − 2i) = 0 e quindi ci
si riduce al prodotto di due rette immaginarie x = 2i, x = −2i: in questo caso la conica non ammette alcun
punto reale.
Esempio 1.3 Ogni conica della forma Ax2 + Cy 2 + F = 0, dove A, C, F siano tutti diversi da zero, è non
degenere (o, come anche si dice, irriducibile), in quanto, esplicitando la y in funzione della x si ottengono
due funzioni che non sono lineari, e che quindi non possono rappresentare delle rette (reali o immaginarie).
§1.2 Intersezioni retta-conica e conica-conica
Limitiamoci a considerare coniche non degeneri, a coefficienti reali: poiché una conica è una curva algebrica
di ordine 2, il numero di intersezioni (reali o no) tra una retta ed una conica è pari a due: infatti, l’equazione
che si ottiene risolvendo il sistema
ax + by + c = 0
(1.2)
Ax2 + Bxy + Cy 2 + Dx + Ey + F = 0
è di II grado, e per il teorema fondamentale dell’algebra ammette due soluzioni che potranno essere reali
distinte (nel qual caso la retta si dice secante), reali coincidenti (la retta si dice tangente), o complesse
coniugate (la retta è esterna alla conica).
1 il
discorso potrebbe essere generalizzato a coniche con coefficienti complessi; tale caso non sarà in questa sede preso in esame.
“retta” in senso generalizzato è definita come il luogo dei punti che soddisfano un’equazione lineare della forma ax+by +
c = 0 a coefficienti complessi: se a, b, c ∈ R, si ha l’equazione della consueta “retta reale” della geometria analitica elementare.
2 una
Prof. Ivan Cervesato - L. S. “Einstein”
4
Se ora si considerano due coniche (reali, non degeneri) di equazioni f (x, y) = 0 e g(x, y) = 0, il sistema di IV
grado3
f (x, y) = 0
(1.3)
g(x, y) = 0
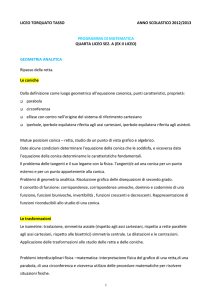
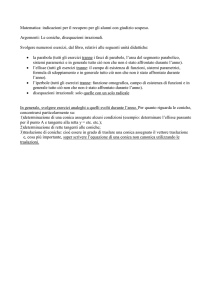
ammette al più quattro soluzioni reali: queste sono in generale distinte, ma in casi particolari possono anche
essere coincidenti: le possibili situazioni sono illustrate nelle seguenti figure 1-5.
Figura 2
Figura 1
Figura 1: i punti A, B, C, D sono tutti distinti: questo è il caso generale. Il sistema (1.3) ha quattro soluzioni
semplici. Si noti che A, B, C, D sono a tre a tre non allineati.
Figura 2: A ≡ B e A, C, D distinti: il sistema (1.3) in questo caso presenta una soluzione doppia (alla quale
corrisponde il punto A ≡ B) e due soluzioni semplici C, D. Le due coniche hanno in A la stessa tangente,
per cui si dice che in A hanno un contatto semplice o anche che hanno in comune A e il punto infinitamente
vicino ad A nella direzione della tangente.
Figura 3
Figura 4
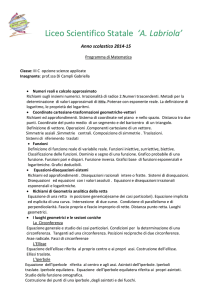
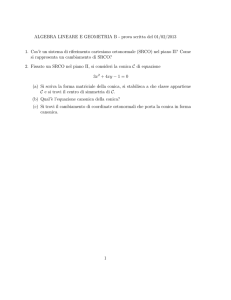
Figura 3: A ≡ B, C ≡ D, con A e C distinti: il sistema (1.3) presenta due soluzioni doppie cui corrispondono
i punti A e C. Si dice che le due coniche sono bitangenti (in A e in C).
3 ricordiamo
che si dice grado di un sistema il prodotto dei gradi delle singole equazioni.
Coniche
5
Figura 4: A ≡ B ≡ C, A distinto da D: il sistema (1.3) presenta
una soluzione tripla, cui corrisponde il punto A ≡ B ≡ C, ed
una soluzione semplice, cui corrisponde D. Si dice che le due
coniche si osculano in A, o che in A hanno un contatto doppio o
che hanno in comune A e i due punti infinitamente vicini ad A
su f (o su g).
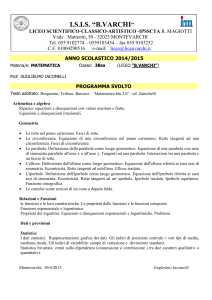
Figura 5: A ≡ B ≡ C ≡ D: il sistema (1.3) presenta una
soluzione quadrupla e si dice che le due coniche si iperosculano o
che hanno in A un contatto triplo o anche che hanno in comune
A ed i tre punti infinitamente vicini ad A su f (o su g).
Figura 5
Accenniamo infine al caso più generale di due curve algebriche Cn , Cm rispettivamente di ordine n, m
rappresentate dalle equazioni fn (x, y) = 0 e gm (x, y) = 0: per determinare i punti comuni alle due curve
occorre risolvere il sistema, di grado nm:
fn (x, y) = 0
(1.4)
gm (x, y) = 0
Si può dimostrare che tale sistema o ammette esattamente nm soluzioni (distinte o in vario modo coincidenti),
o ne ammette infinite: si ha cioè il
Teorema 1.1 (Bezout) Due curve algebriche di ordine n, m hanno in comune esattamente nm punti
(distinti o in vario modo coincidenti), oppure hanno una parte in comune.
Poiché tuttavia un’ulteriore discussione implicherebbe l’introduzione di nuovi concetti (coordinate omogenee,
punti impropri, ecc.), ci limitiamo ai pochi cenni che sono stati qui sommariamente illustrati, avvertendo il
lettore che tutta la materia è suscettibile di interessanti approfondimenti per i quali è giocoforza rimandare
a testi specialistici.
§2. Riconoscimento di una conica
Assegnata un’equazione della forma (1.1) si pone il problema di determinare il tipo di conica (ellisse, iperbole,
parabola) rappresentato dall’equazione data, e se la conica sia degenere o no.
Per risolvere la questione, cominciamo col dare la seguente
Definizione 2.1 Posto
I1 = A + C
I2 =
A
B/2
B/2
C
A
I3 = B/2
D/2
B/2 D/2
C
E/2
E/2
F
chiamiamo rispettivamente invariante lineare, invariante quadratico, invariante cubico4 le quantità reali:
I1 , det I2 , det I3 .
4 il termine invariante è dovuto al fatto che tali grandezze rimangono invariate se si varia sistema di riferimento (ad esempio,
se si traslano o si ruotano gli assi).
Prof. Ivan Cervesato - L. S. “Einstein”
6
Per riconoscere se una conica è degenere o no si ricorre al seguente
Teorema 2.1 La conica della forma (1.1) risulta degenere se e solo se det I3 = 0. In tal caso:
• se det I2 > 0, allora la conica (ellisse degenere) si spezza in due rette immaginarie coniugate5 e non
parallele6 ;
• se det I2 = 0, allora la conica (parabola degenere) si spezza in due rette parallele o coincidenti (reali o
no);
• se det I2 < 0, allora la conica (iperbole degenere) si spezza in due rette reali distinte e incidenti (se
I1 = 0 le rette sono perpendicolari).
Se la conica non è degenere, il seguente risultato ne permette agevolmente il riconoscimento:
Teorema 2.2 Sia det I3 = 0; allora
• se det I2 > 0, allora la (1.1) rappresenta un’ellisse (reale se e solo se I1 · det I3 < 0);
• se det I2 = 0, allora la (1.1) rappresenta una parabola;
• se det I2 < 0, allora la (1.1) rappresenta un’iperbole (in particolare, si ha un’iperbole equilatera se e
solo se I1 = 0).
Il seguente prospetto riassume per comodità i risultati dei teoremi 2.1 e 2.2.
det I3 = 0: conica degenere
det I3 = 0: conica non degenere
det I2 > 0
rette immaginarie coniugate non parallele
ellisse (reale se e solo se I1 · det I3 < 0)
det I2 = 0
rette parallele o coincidenti (reali o no)
parabola
det I2 < 0
rette reali distinte incidenti (perpendicolari se I1 = 0)
iperbole (equilatera se e solo se I1 = 0)
Esempio 2.1 Si consideri la conica di equazione x2 + 2y 2 + 1 = 0: poiché det I3 = 2, si tratta di una conica
non degenere; essendo inoltre det I2 = 2, siamo in presenza di un’ellisse; tale ellisse è immaginaria, in quanto
l’equazione della curva non è evidentemente soddisfatta da nessuna coppia di valori reali x, y (d’altro canto
I1 = 3 e quindi I1 · det I3 > 0).
Esempio 2.2 Si consideri la conica di equazione x2 − y 2 = 0: poiché det I3 = 0, si tratta di una conica
degenere; essendo det I2 = −1, siamo in presenza di un’iperbole degenere; tale iperbole è rappresentata dalla
coppia di rette reali incidenti y = ±x (perpendicolari: d’altro canto I1 = 0).
Esempio 2.3 Si consideri la conica di equazione x2 +9 = 0: poiché det I3 = 0, si tratta di una conica degenere;
essendo det I2 = 0, siamo in presenza di una parabola degenere; poiché x2 + 9 = (x + 3i)(x − 3i) = 0 la
parabola è costituita dalla coppia di rette immaginarie x = ±3i.
5 due
rette si dicono coniugate se i coefficienti dell’una sono i complessi coniugati dei coefficienti dell’altra; inoltre con il
termine di ellisse degenere ci si riferirà anche al caso della circonferenza, che non è altro che una particolare ellisse.
6 l’intersezione tra due rette immaginarie coniugate, non parallele, è costituita da un solo punto reale: ad esempio, x2 + y 2 = 0
è riducibile, potendosi scomporre come (x + iy)(x − iy) = 0, e l’intersezione reale delle due rette immaginarie x = ±iy è costituita
evidentemente dal solo punto x = 0, y = 0.
Coniche
7
Esempio 2.4 Si consideri la conica di equazione x2 + 5x + 6 = 0: poiché det I3 = 0, si tratta di una conica
degenere; essendo det I2 = 0, siamo nuovamente in presenza di una parabola degenere; poiché x2 + 5x + 6 =
(x + 2)(x + 3) = 0 la parabole è costituita dalla coppia di rette reali (parallele) x = −2 e x = −3.
Esempio 2.5 Si consideri la conica di equazione 4x2 + y 2 = 0: poiché det I3 = 0, si tratta di una conica
degenere; essendo det I2 = 4, siamo in presenza di un’ellisse degenere; poiché 4x2 +y 2 = (y +2ix)(y −2ix) = 0
l’ellisse è costituita dalla coppia di rette immaginarie y = ±2ix il cui unico punto reale è x = 0, y = 0.
Si può quindi dire che le sole coniche che siano reali (cioè dotate di infiniti punti reali) e non degeneri siano
le “consuete” ellissi, iperboli e parabole.
§3. Riduzione di una conica traslata in forma canonica
È possibile dimostrare che se B = 0, ossia se nella (1.1) è presente il termine rettangolare, allora la (1.1)
rappresenta una conica ruotata rispetto al sistema di riferimento; se invece D = 0 o E = 0, allora la conica
risulta traslata.
Per il momento faremo l’ipotesi che il termine rettangolare non sia presente nella (1.1): in altri termini,
considereremo coniche traslate, ma non ruotate, di equazione
Ax2 + Cy 2 + Dx + Ey + F = 0
(3.1)
È preliminarmente opportuno ricordare che la forma canonica di una parabola (con asse parallelo all’ asse y
o con asse parallelo all’asse x), di un’ellisse reale e di un’iperbole è rispettivamente data dalle
y = ax2 + bx + c
x = ay 2 + by + c
x2
y2
+ 2 =1
2
a
b
x2
y2
− 2 = ±1
2
a
b
(3.2)
con a, b, c ∈ R.
Esempio 3.1 È facile rendersi conto che, se C = 0, la (3.1) rappresenta una “consueta” parabola con asse
parallelo all’asse delle y. Analogamente, se A = 0 la (3.1) rappresenta una parabola con asse parallelo all’asse
x.
Per ricondurre quindi una conica di equazione (3.1) ad una conica della forma (3.2) e quindi disegnare
agevolmente il grafico della curva corrispondente, sarà sufficiente effettuare una traslazione degli assi di
equazione
x=X +α
(3.3)
y =Y +β
Sarà conveniente distinguere il caso delle coniche (non degeneri e reali) che presentano un centro di simmetria
(ellisse ed iperbole, per questo chiamate coniche a centro), dal caso della parabola, che non ammette centro
di simmetria.
§3.1 Coniche a centro: ellisse e iperbole
Supponiamo dapprima che la (3.1) rappresenti un’ellisse o un’iperbole: in tal caso, nella (3.1) A e C devono
essere entrambi diversi da zero (infatti det I2 = AC = 0). Scegliendo adeguatamente i valori da assegnare
ad α e β nella (3.3) è possibile imporre che non figurino più termini di primo grado, quindi arrivare ad
un’equazione della forma
(3.4)
AX 2 + CY 2 + F = 0
che rappresenta un’ellisse o un’iperbole in forma canonica nel sistema di riferimento traslato XO Y : in
proposito si può osservare che
Prof. Ivan Cervesato - L. S. “Einstein”
8
• se A, C, F = 0, la conica non è degenere, come è già stato osservato nel precedente esempio 1.3;
• se A, C, F sono tutti concordi, la (3.4) rappresenta un’ellisse non reale; se invece A e C sono discordi,
si ha un’iperbole; se A e C sono concordi tra loro e discordi da F si ha un’ellisse reale (si ricordi, in
ogni caso, il teorema 2.2).
Nel sistema XO Y è facile disegnare la curva, se essa è reale, e ricavare le grandezze caratteristiche (fuochi,
vertici, asintoti, ecc.). Questo procedimento equivale a portare l’origine O del sistema di riferimento traslato
a coincidere con il centro della conica, come risulta evidente dal seguente
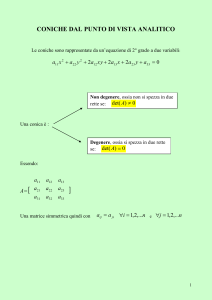
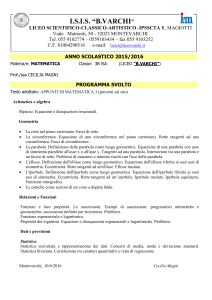
Esempio 3.2 Si abbia la conica di equazione x2 − 4y 2 − 8x − 8y + 8 = 0. Si verifica immediatamente
che det I3 = 16 e det I2 = −4, quindi si tratta di un’iperbole (traslata) non degenere. Operando quindi la
traslazione (3.3), dopo qualche semplice passaggio algebrico, riordinando e raccogliendo, si ottiene
X 2 − 4Y 2 + X(2α − 8) + Y (−8β − 8) + α2 − 4β 2 − 8α − 8β + 8 = 0
(3.5)
Per annullare i termini lineari è sufficiente porre α = 4
e β = −1, il che significa che il nuovo sistema di riferimento XO Y ha la sua origine nel punto O (4, −1).
La (3.5) diventa quindi semplicemente
X 2 − 4Y 2 − 4 = 0
ovvero
X2
−Y2 =1
4
che è l’equazione dell’iperbole (3.5) posta in forma canonica.
Nel sistema traslato XO Y , di tale iperbole si potranno determinare agevolmente il centro (che ovviamente
coincide con O ), i vertici, gli asintoti.
Figura 6
Tramite le relazioni inverse X = x − 4, Y = y + 1 è poi possibile riferire tutte le grandezze al sistema di
riferimento xOy iniziale, nel quale il centro dell’iperbole è (4, −1), i vertici sono (2, −1) e (6, −1), gli asintoti
hanno equazioni y = x/2 − 3, y = −x/2 + 1 (lo si verifichi esplicitamente).
§3.2 Coniche non a centro: parabola
Qualora la conica di partenza fosse una parabola (che non ammette centro di simmetria), il procedimento è
ancora più semplice: in tal caso nella (3.1) mancherà o il termine in x2 (ossia A = 0) o il termine in y 2 (ossia
C = 0); in altri termini, la (3.1) assumerà una delle due forme:
Ax2 + Dx + Ey + F = 0
oppure
Cy 2 + Dx + Ey + F = 0
nelle quali è immediato riconoscere le “consuete” parabole con assi rispettivamente verticale e orizzontale,
che potranno essere disegnate subito.
§4. Riduzione di una conica rototraslata in forma canonica
In questo paragrafo supporremo che nella (1.1) sia presente anche il termine rettangolare, ossia che si abbia
B = 0: come è già stato osservato, ciò equivale a dire che la conica è ruotata (oltre che, eventualmente,
traslata).
Anche in questo caso distinguiamo, per chiarezza, il caso di coniche a centro dal caso di coniche non a centro.
Coniche
9
§4.1 Coniche a centro: ellisse e iperbole
Sia
Ax2 + Bxy + Cy 2 + Dx + Ey + F = 0
(4.1)
l’equazione di una conica (non degenere) a centro.
Per porre la conica in forma canonica si procederà dapprima in modo analogo a quanto illustrato nel precedente §3.1, operando una traslazione degli assi di equazione (3.3), che porti il centro di simmetria della
conica nell’origine O del sistema traslato XO Y . In tal modo l’equazione (4.1) assumerà la forma
AX 2 + BXY + CY 2 + F = 0
(4.2)
Un’ulteriore semplificazione di tale equazione può ottenersi tramite una rotazione degli assi X e Y del sistema
traslato, di equazioni
X = X cos γ − Y sin γ
(4.3)
Y = X sin γ + Y cos γ
Il nuovo sistema di riferimento X O Y è ruotato, rispetto a XO Y , di un opportuno angolo γ, tale da
annullare il coefficiente B del termine rettangolare XY : in questo modo nel sistema X O Y l’equazione della
conica assume la forma (canonica)
A X 2 + C Y 2 + F = 0
(4.4)
e la conica può essere agevolmente disegnata.
Vediamo in concreto come si applica la descritta procedura in un paio di esempi.
Esempio 4.1 (ellisse) Data la conica di equazione
17x2 + 12xy + 8y 2 − 46x − 28y + 17 = 0
(4.5)
è immediato verificare che det I3 = −2 000 e che det I2 = 100, I1 = 25:
si tratta quindi di un’ellisse, non degenere e reale (I1 · det I3 < 0).
Effettuiamo la traslazione degli assi (3.3): si ha
17(X + α)2 + 12(X + α)(Y + β) +
+8(Y + β)2 − 46(X + α) − 28(Y + β) + 17 = 0
da cui, moltiplicando e riordinando,
17X 2 + 12XY + 8Y 2 + 2(17α + 6β − 23)X + 2(6α + 8β − 14)Y +
+17α2 + 12αβ + 8β 2 − 46α − 28β + 17 = 0
Figura 7
Per annullare i termini lineari occorre risolvere il sistema
17α + 6β − 23 = 0
⇒
6α + 8β − 14 = 0
α = 1, β = 1
Per tali valori risulta 17α2 + 12αβ + 8β 2 − 46α − 28β + 17 = −20, talché nel sistema traslato XO Y la (4.5)
viene a scriversi
17X 2 + 12XY + 8Y 2 − 20 = 0
(4.6)
Il punto O (1, 1), origine del sistema traslato, rappresenta il centro di simmetria dell’ellisse.
Prof. Ivan Cervesato - L. S. “Einstein”
10
Per semplificare ulteriormente la (4.6) con l’eliminazione del termine rettangolare in XY effettuiamo ora una
rotazione degli assi X e Y di un angolo γ e centro O : se indichiamo con X e Y gli assi ruotati, applicando
le (4.3) alla (4.6) si ha
(17 cos2 γ + 12 cos γ sin γ + 8 sin2 γ)X 2 + 2(6 cos2 γ − 9 cos γ sin γ − 6 sin2 γ)X Y +
+(17 sin2 γ − 12 cos γ sin γ + 8 cos2 γ)Y 2 − 20 = 0
Affinché si annulli il termine rettangolare deve evidentemente essere
6 cos2 γ − 9 cos γ sin γ − 6 sin2 γ = 0
⇒
6 tan2 γ + 9 tan γ − 6 = 0
⇒
tan γ =
1
∨ tan γ = −2
2
Considerando ad esempio tan γ = 1/2, cui corrisponde γ ≈ 26.6◦ , risulta
cos γ = 1
2
=√
5
1 + tan γ
2
sin γ = tan γ
1
=√
5
1 + tan γ
2
Per tali valori l’equazione della conica nel sistema X O Y diventa
20X 2 + 5Y 2 − 20 = 0
(4.7)
ossia
Y 2
=1
4
equazione canonica dell’ellisse nel sistema X O Y (figura 7).
X 2 +
(4.8)
Esempio 4.2
l’equazione
(iperbole)
Si
consideri
3x2 + 10xy + 3y 2 − 4x + 4y + 4 = 0
(4.9)
Per determinare la natura della conica è sufficiente osservare che det I3 = 0 e det I2 < 0: la
(4.9) rappresenta pertanto un’iperbole non degenere.
Per ridurre la conica in forma canonica operiamo
dapprima la traslazione (3.3), ottenendo
3(X + α)2 + 10(X + α)(Y + β) +
+3(Y + β)2 − 4(X + α) + 4(Y + β) + 4 = 0
da cui
Figura 8
3X 2 + 10XY + 3Y 2 + X(6α + 10β − 4) + Y (10α + 6β + 4) + 3α2 + 10αβ + 3β 2 − 4α + 4β + 4 = 0
Imporre l’annullamento dei termini lineari significa imporre che si annullino i coefficienti di X ed Y , ossia
imporre la condizione
6α + 10β − 4 = 0
⇒ α = −1 ∨ β = 1
10α + 6β + 4 = 0
Coniche
11
Il punto O (−1, 1) rappresenta l’origine del sistema traslato ed il centro di simmetria dell’iperbole; poiché
sostituendo i valori α = −1, β = 1 nell’espressione 3α2 + 10αβ + 3β 2 − 4α + 4β + 4 si ottiene 8, nel sistema
traslato la (4.9) assume la forma
3X 2 + 10XY + 3Y 2 + 8 = 0
(4.10)
Operiamo ora la rotazione degli assi di equazione (4.3): la (4.10) diventa allora
3(X cos γ − Y sin γ)2 + 10(X cos γ − Y sin γ)(X sin γ + Y cos γ) + 3(X sin γ + Y cos γ)2 + 8 = 0
da cui, con qualche passaggio,
(3 + 10 cos γ sin γ)X 2 + 10(cos2 γ − sin2 γ)X Y + (3 − 10 cos γ sin γ)Y 2 + 8 = 0
(4.11)
Imponendo l’annullamento del coefficiente del termine rettangolare si ha
cos2 γ − sin2 γ = 0
tra le cui soluzioni assumiamo per esempio γ = 45◦ : per tale valore la (4.11) viene a scriversi
8X 2 − 2Y 2 + 8 = 0
⇒
X 2 −
Y 2
= −1
4
(4.12)
che rappresenta l’equazione cercata: nel sistema X O Y l’iperbole ha pertanto come asintoti le rette Y =
±2X e come vertici i punti di coordinate (0, ±2).
§4.2 Coniche non a centro: parabola
Supponiamo ora di dover ricondurre a forma canonica una parabola, che non ammette, come noto, centro
di simmetria: in tal caso è sufficiente procedere subito con una rotazione degli assi che elimini il termine
rettangolare e porti la parabola in una delle due forme canoniche (corrispondenti cioè a curve con asse
orizzontale o con asse verticale: §3.2), come nel seguente
Esempio 4.3 (parabola) Si consideri l’equazione
√
√
√
3x2 + 2 3xy + y 2 + 2(1 − 4 3)x − 2(4 + 3)y + 20 = 0
(4.13)
che, essendo det I3 = 0 e det I2 = 0, rappresenta una parabola non
degenere ruotata e traslata.
Operiamo la rotazione degli assi di equazioni
x = X cos γ − Y sin γ
(4.14)
y = X sin γ + Y cos γ
in modo che la (4.13) venga a scriversi
√
3(X cos γ − Y sin γ)2 + 2 3(X cos γ − Y sin γ)(X sin γ + Y cos γ) +
√
+(X sin γ + Y cos γ)2 + 2(1 − 4 3)(X cos γ − Y sin γ) +
√
−2(4 + 3)(X sin γ + Y cos γ) + 20 = 0
(4.15)
Figura 9
Come si verifica con qualche calcolo, se si pone uguale a zero il coefficiente del termine rettangolare XY si
ottiene l’equazione
√
√
3 sin2 γ + 2 sin γ cos γ − 3 cos2 γ = 0
Prof. Ivan Cervesato - L. S. “Einstein”
12
da cui
√
3 tan2 γ + 2 tan γ −
e quindi
1
tan γ = √
3
∨
√
3=0
√
tan γ = − 3
Si assuma per esempio la prima soluzione,
corrispondente ad una rotazione degli assi in senso antiorario di
√
30◦ : poiché sin 30◦ = 1/2 e cos 30◦ = 3/2, la (4.15) diventa
√
√ √ 2
1
1
1
3
3
3
X− Y
X+
Y +
X+
Y
+
3
2
2
2
2
2
2
√
√ √
√
1
3
3
1
X − Y − 2(4 + 3)
X+
Y + 20 = 0
+2(1 − 4 3)
2
2
2
2
√
1
3
X− Y
2
2
2
√
+2 3
che, svolgendo i calcoli, permette di scrivere
Y = X 2 − 4X + 5
(4.16)
È questa la forma canonica cercata, che agevolmente consente di rappresentare la parabola nel riferimento
XOY (figura 9).
§5. Fasci di coniche
Nello studio della geometria analitica è già stata affrontata l’analisi e la rappresentazione di fasci di rette,
di parabole e di circonferenze. Alla luce di quanto esposto nei precedenti paragrafi, vogliamo ora tornare
sull’argomento da un punto di vista più generale, sia pure limitando la trattazione solo ad alcuni aspetti
essenziali.
A tal fine cominciamo col dare la seguente
Definizione 5.1 Date due coniche, degeneri o meno ma distinte, di equazioni f (x, y) = 0 e g(x, y) = 0,
chiamiamo fascio di coniche la totalità delle coniche che si ottengono dall’equazione
λf (x, y) + µg(x, y) = 0
(5.1)
al variare di λ, µ ∈ R, che sono i coefficienti di combinazione lineare; come al solito le coniche di equazioni
f (x, y) = 0 e g(x, y) = 0 sono dette generatrici del fascio di coniche.
Come noto, il fascio potrà anche essere espresso in funzione di un solo parametro k = µ/λ (o anche h = λ/µ):
f (x, y) + kg(x, y) = 0
(5.2)
dove la prima generatrice si ottiene ponendo k = 0, la seconda generatrice ponendo (sia pure con abuso di
scrittura) k = ∞. I punti comuni alle generatrici sono detti punti base del fascio.
Osservazioni
1. Per un punto base P (x0 , y0 ) passano tutte le coniche del fascio, in quanto
f (x0 , y0 ) + kg(x0 , y0 ) = 0
∀k
Coniche
13
2. Per un punto Q(x1 , y1 ) che non sia un punto base passa una e una sola conica del fascio (5.2), in quanto
l’equazione
f (x1 , y1 ) + kg(x1 , y1 ) = 0
determina k.
3. Un fascio è individuato da due sue qualunque coniche (distinte).
4. In un fascio vi sono tre coniche degeneri (distinte o no), oppure tutte le coniche del fascio sono degeneri.
5. Per cinque punti del piano passa una e una sola conica, oppure ne passano infinite: il secondo caso si
verifica se e solo se quattro dei cinque punti dati sono allineati.7
Lo studio di un fascio di coniche potrà essere condotto, tenendo conto dei teoremi 2.1 e 2.2, come nei seguenti
esempi.
Esempio 5.1 Si consideri l’equazione
(k − 3)x2 − ky 2 − k + 1 = 0
(5.3)
dove k è un parametro reale.
La (5.3) rappresenta un fascio di coniche: osserviamo anzitutto che, poiché la (5.3) si può scrivere nella forma
k(x2 − y 2 − 1) − 3x2 + 1 = 0
le generatrici del fascio sono l’iperbole equilatera di equazione x2 − y 2 − 1 = 0 e la parabola degenere di
equazione 3x2 − 1 = 0.
Non vi sono punti base (reali) in quanto il sistema
x2 − y 2 − 1 = 0
3x2 − 1 = 0
è, come subito si verifica, impossibile.
Studiamo ora la natura delle coniche del fascio in funzione di k: poiché
k−3 0
k−3 0
; I3 = 0
−k
I1 = −3; I2 =
0
−k
0
0
0
0
−k + 1
si ha det I3 = −k(k − 3)(−k + 1) = 0 se e solo se k = 0, 1, 3: per tali valori la conica è degenere e precisamente
si ha:
→ parabola degenere
se k = 0 det I2 = 0
→ parabola degenere
se k = 3 det I2 = 0
se k = 1 det I2 = 2 → 2x2 + y 2 = 0 ellisse degenere
Se invece k = 0, 1, 3, la conica non è degenere: in base al teorema 2.2 si ha
det I2 > 0
det I2 < 0
per 0 < k < 3
per k < 0, k > 3
→ ellisse
→ iperbole
Nel caso 0 < k < 3, k = 1 (si ricordi che in base alla discussione preliminare si sa già che per k = 1
l’ellisse è degenere) A e C sono concordi tra loro (sono entrambi negativi): se l’ ellisse è reale o no può
essere stabilito studiando il segno del coefficiente F = −k + 1: è immediato ricavare che per 0 < k < 1 il
7 per
la dimostrazione dei punti 3,4,5 si rimanda, ad esempio, a [DM], cap. III.
Prof. Ivan Cervesato - L. S. “Einstein”
14
coefficiente F è positivo, e quindi si ha un’ellisse reale; per 1 < k < 3 il coefficiente F è negativo, e quindi si
ha un’ellisse immaginaria (alla stessa conclusione si giunge analizzando il segno del prodotto I1 · det I3 per
0 < k < 3, k = 1).
Esempio 5.2 Si debba studiare il fascio di coniche di equazione
x2 + kxy + y 2 − 4 = 0
(5.4)
al variare del parametro reale k.
Osserviamo anzitutto che le generatrici sono la circonferenza, di centro O e raggio 2, di equazione x2 +y 2 −4 =
0 e l’iperbole degenere di equazione xy = 0 (costituita dalla coppia degli assi coordinati). I punti base del
fascio sono immediatamente ricavabili ponendo a sistema le due generatrici: si ottengono subito i punti
(±2, 0) e (0, ±2).
Sia ora
1
k/2 0
k2
1
k/2
I1 = 2; det I2 = det
= 1 − ; det I3 = det k/2
1
0 = k2 − 4
k/2
1
4
0
0
−4
Dallo studio dell’invariante cubico si deduce che la (5.4) rappresenta coniche degeneri per k 2 − 4 = 0, ossia
k = ±2: poiché per tali valori det I2 = 0, la (5.4) dà una parabola degenere:
• se k = 2 la conica si spezza nelle due rette parallele di equazioni x + y + 2 = 0 e x + y − 2 = 0;
• se k = −2, la conica si spezza nelle due rette parallele di equazioni x − y + 2 = 0 e x − y − 2 = 0.
Come già osservato, anche xy = 0 rappresenta una conica degenere (iperbole degenere) ottenuta per k = ∞.
Supponiamo quindi k = ±2: in tal caso det I2 = 0 e
• se 1 − k 2 /4 > 0, ossia se −2 < k < 2, la (5.4) rappresenta ellissi reali (infatti per tali valori di k risulta
I1 · det I3 < 0);
• se 1 − k 2 /4 < 0, ossia se k < −2 ∨ k > 2, la (5.4) rappresenta iperboli.
Esempio 5.3 Si debba studiare il fascio di coniche di equazione
2(k − 1)x2 − 2(k − 1)xy + ky 2 + 2y = 0
al variare del parametro reale k.
Potendosi anzitutto scrivere
(5.5)
k(2x2 − 2xy + y 2 ) − 2x2 + 2xy + 2y = 0
le generatrici del fascio sono 2x2 − 2xy + y 2 = 0, che risulta un’ellisse degenere (costituita dalle due rette
immaginarie coniugate y = x(1 ± i), che si riducono al solo punto reale (0, 0)), e x2 − xy − y = 0, iperbole
non degenere (come si verifica subito analizzando gli invarianti della conica).
Sia ora
I1 = 3k − 2;
2(k − 1)
det I2 = det
1−k
1−k
k
= k 2 − 1;
2(k − 1)
det I3 = det 1 − k
0
1−k
k
1
0
1 = −2k + 2
0
Risulta det I3 = 0 per k = 1: per tale valore anche det I2 = 0, pertanto la (5.5) rappresenta la parabola
degenere di equazione y 2 + 2y = 0, equivalente alla coppia di rette parallele y = 0 e y = −2.
Supponiamo ora k = 1: in tal caso
Coniche
15
• se k < −1 ∨ k > 1 si ha det I2 > 0, quindi si hanno ellissi: queste sono reali, come risulta studiando il
segno di I1 · det I3 = (3k − 2)(−2k + 2) nell’intervallo considerato;
• se k = −1 si ha det I2 = 0, quindi la (5.5), che viene a scriversi −4x2 + 4xy − y 2 + 2y = 0, rappresenta
una parabola;
• se −1 < k < 1 si ha det I2 < 0, pertanto la (5.5) rappresenta iperboli (per k = 2/3 l’iperbole è
equilatera).
§6. Bibliografia
[AMP]
[DM]
[LMN]
[My]
[SN]
[Vi]
Andreini M., Manara R., Prestipino F., Matematica controluce, vol. 2, McGraw Hill, Milano 2000.
Dantoni G., Mammana C., Lezioni di geometria, Di Stefano editore, Genova 1975.
Lamberti L., Mereu L., Nanni A., Corso di matematica uno, Etas, Milano 1996.
Myškis A., Lezioni di matematica generale, Edizioni Mir, Mosca 1979.
Scovenna M., Noris C., Complementi di geometria analitica, Cedam, Padova 2001.
Villa M., Lezioni di geometria, Cedam, Padova 1972.
ESERCIZI
Es. 1 Riconoscere le seguenti coniche; nel caso di coniche reali (eventualmente degeneri) e non ruotate, darne
una rappresentazione grafica accurata, dopo averne individuato le caratteristiche (vertici, centro, asintoti,
ecc.)
x2 + xy + 2y 2 − 6 = 0
√
√
x2 − 2xy + y 2 + 2x − 3 2y = 0
√
23x2 + 26 3xy − 3y 2 − 144 = 0
(ellisse)
x2 − 4xy + y 2 − 8 = 0
(iperbole)
(parabola)
8x2 + 4xy + 5y 2 − 12x − 12y = 0
(ellisse)
(iperbole)
x2 + xy + y 2 + x + y = 0
(ellisse)
x2 + y 2 − 2x + 8y + 1 = 0
(circonf.)
9x2 + 4y 2 − 18x − 16y − 11 = 0
(ellisse)
9x2 − 4y 2 − 36x − 24y − 36 = 0
(iperbole)
x2 + 2y 2 − x − y − 1 = 0
(ellisse)
2
2
2
2
x + y − 2x + 4y + 5 = 0
(ell. deg.)
x + 4y = 0
(ell. deg.)
2x2 + 3y 2 − 7x = 0
(ellisse)
x2 + 2xy + y 2 − 2x − 2y + 1 = 0
(par. deg.)
2
2
2
4x − 4xy + y − 6x + 3y + 2 = 0 (par. deg.)
y − 2y + 1 = 0
(par. deg.)
x2 − 4y 2 + 24y − 40 = 0
x2 + 9y 2 + 36y + 27 = 0
(ellisse)
2
(iperbole)
2
3x − 4x + y − 2 = 0
(parabola)
x + xy − 4x − 3y + 3 = 0
(iperb. deg.)
x2 + 3y 2 + 1 = 0
(ell. n. r.)
x2 + y 2 + 4 = 0
(circ. n. r.)
2
2xy − 2y + x − y = 0
(iperb. deg.)
2
2
x + y − 2x − 4y + 5 = 0
(ell. deg.)
Es. 2 Riconoscere e ridurre a forma canonica le seguenti coniche:
a) 4xy + 3y 2 + 16x + 12y − 36 = 0
[x2 /16 − y 2 /36 = 1]
16
Prof. Ivan Cervesato - L. S. “Einstein”
b) 7x2 + 6xy − y 2 + 28x + 12y + 28 = 0
[x2 − 4y 2 = 0]
c) 5x2 − 2xy + 5y 2 − 4x + 20y + 20 = 0
[2x2 + 3y 2 = 0]
Es. 3 Riconoscere e ridurre a forma canonica le seguenti coniche:
a) 7x2 + 60xy + 32y 2 − 14x − 60y + 7 = 0
[x2 − 4y 2 = 0]
b) 5x2 − 6xy + 2y 2 − 2x + 2 = 0
c) x2 − 6xy + 8y 2 − 4y − 4 = 0
[ell. degenere (2, 3)]
[iperbole degenere (x − 4y − 2)(x − 2y + 2) = 0]
Es. 4 Riconoscere e ridurre a forma canonica le seguenti coniche:
a) 9x2 − 24xy + 16y 2 − 20x + 110y − 50 = 0
[y 2 = 2x]
b) 4x2 + 4xy + y 2 − 12x − 6y + 5 = 0
[parabola degenere 2x + y − 5 = 0, 2x + y − 1 = 0]
c) x2 + 4xy + 3y 2 − 6x − 12y + 9 = 0
[iperbole degenere (x + y − 3)(x + 3y − 3) = 0]
Es. 5 Riconoscere e ridurre a forma canonica le seguenti coniche:
a) x2 − 6xy + 9y 2 + 4x + 12y + 4 = 0
[parabola degenere (x − 3y + 2)2 = 0]
b) 11x2 − 20xy − 4y 2 − 20x − 8y + 1 = 0
c) 5x2 + 4xy + y 2 − 6x − 2y + 2 = 0
[9x2 + 16y 2 = 5]
[ellisse degenere (1, −1)]
Es. 6 Studiare, al variare del parametro reale k, i seguenti fasci di coniche:
a) kx2 − (k − 1)y 2 + k = 0
(k < 0, k > 1: iperbole; 0 < k < 1: ellisse immaginaria; k = 0, 1: parabola degenere).
b) (k − 3)x2 + (2 − k)y 2 − k + 1 = 0
(k < 2, k = 1, k > 3: iperbole; 2 < k < 3: ellisse immaginaria; k = 2, 3: parabola degenere; k = 1: iperbole
degenere).
c) (k − 3)x2 + 4ky 2 + k − 3 = 0
(k < 0, k > 3: ellisse immaginaria; 0 < k < 3: iperbole; k = 0, 3: parabola degenere).
Es. 7 Studiare, al variare del parametro reale k, i seguenti fasci di coniche:
a) (k − 1)x2 + (k + 2)y 2 − 4x + 2y = 0
Coniche
17
(k = −7/5 iperbole degenere; k = 1, −2 parabola; k < −2 ∨ k > 1 ellissi reali; −2 < k < 1, k = −7/5
iperboli; k = −1/2 iperbole equilatera).
b) 3xy − 3y − 6x + k(y 2 − xy) = 0
(k = 1 iperbole degenere; k < 0 ∨ k > 1, k = 3 ellissi reali; 0 < k < 1 ellissi immaginarie; k = 3 parabola;
k = 0 iperbole equilatera).
c) x2 + 2xy + ky 2 + 2y − 1 = 0
(k = 0 iperbole degenere; k > 1 ellissi reali; k = 1 parabola; k < 1, k = 0 iperboli; k = −1 iperbole
equilatera).
Es. 8 Studiare, al variare del parametro reale k, i seguenti fasci di coniche::
a) (k + 1)x2 + (1 − k)y 2 + 4kx − 1 = 0
(k = 1 parab. degenere; k = −1 parabola; −1 < k < 1 ellissi reali; k < −1 ∨ k > 1 iperboli; k = ∞ iperbole
equilatera).
b) x2 + (k − 2)xy + y 2 − 4 = 0
(k = 0 ∨ k = 4 parab. degeneri; k = ∞ iperbole degenere; 0 < k < 4 ellissi reali; k < 0 ∨ k > 4 iperboli).
c) x2 + 2kxy + y 2 − 2kx + 1 = 0
√
√
√
√
√
(k = ±1/ 2 ellissi degeneri; −1 < k < −1/ 2 ∨ 1/ 2 < k < 1 ellissi reali; −1/ 2 < k < 1/ 2 ellissi
immaginarie; k = ±1 parabole; k < −1 ∨ k > 1 iperboli; k = ∞ iperbole equilatera degenere).