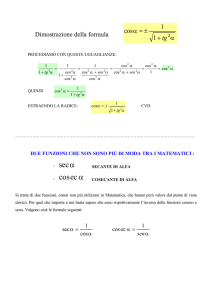
La necessità di trasmettere potenza
tra organi in moto rotatorio è un
problema frequentissimo
e di grande importanza nell’ingegneria.
Gli assi di rotazione tra i quali deve
essere trasmesso il moto possono
essere paralleli
In questo motoriduttore
gli assi sono paralleli.
1
La necessità di trasmettere potenza
tra organi in moto rotatorio è un
problema frequentissimo
e di grande importanza nell’ingegneria.
Gli assi di rotazione tra i quali deve
essere trasmesso il moto possono
essere paralleli , incidenti
La necessità di trasmettere potenza
tra organi in moto rotatorio è un
problema frequentissimo
e di grande importanza nell’ingegneria.
Gli assi di rotazione tra i quali deve
essere trasmesso il moto possono
essere paralleli , incidenti o sghembi.
Ruote elicoidali
ad assi sghembi
2
La necessità di trasmettere potenza
tra organi in moto rotatorio è un
problema frequentissimo
e di grande importanza nell’ingegneria.
Gli assi di rotazione tra i quali deve
essere trasmesso il moto possono
essere paralleli , incidenti o sghembi.
Vite senza fine e
ruota elicoidale
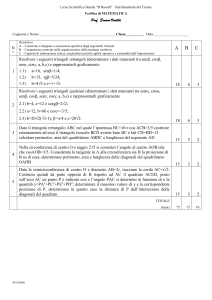
La necessità di trasmettere potenza
tra organi in moto rotatorio è un
problema frequentissimo
e di grande importanza nell’ingegneria.
Gli assi di rotazione tra i quali deve
essere trasmesso il moto possono
essere paralleli , incidenti o sghembi.
Coppia conica
Nelle coppie coniche gli assi delle due
ruote sono incidenti.
Quando ciò non accade e gli assi sono
sghembi la coppia si dice “ipoide”
Coppia ipoide
3
Coppia ipoide.
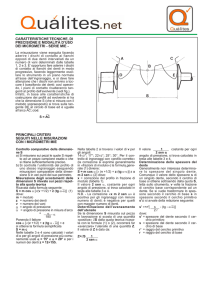
La trasmissione di potenza tra alberi con ruote di frizione non è utilizzata perché
richiederebbe enormi forze di contatto a fronte di modeste coppie trasmesse
M Ft r N f r
Ipotizzando un coefficiente di attrito
di 0,15 (acciaio su acciaio),
la componente tangenziale,
utile alla trasmissione della coppia,
è circa un settimo di quella radiale.
Angolo d’attrito
f = coefficiente di attrito
r
Forze di
contatto
Ft
Forze tangenziali
4
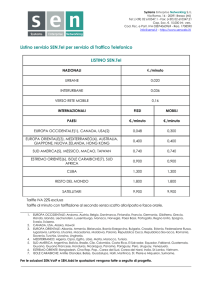
Conviene pertanto utilizzare dei profili coniugati che possano trasmettere coppia
attraverso forze normali alle superfici in contatto e non tangenziali
Ft è la componente “utile” della forza agente sulla superficie in contatto
M Ft r F cos r
La coppia trasmessa vale:
r
F
Ft
ω1
ω2
α
Per valori di α non elevati la componente “utile” Ft è di poco
inferiore alla forza F che sollecita la superficie in contatto.
La trasmissione per ingranaggi consente di trasferire elevate potenze con alto
rendimento ed ampia gamma di velocità, con costruzioni compatte ed affidabili.
Per un angolo caratteristico di 20°,
la componente tangenziale
è circa il triplo di quella radiale.
M Ft r F cos r
F
Ft
α = angolo caratteristico
r
Il movimento può essere trasferito tra assi paralleli, concorrenti o sghembi,
con rapporto di trasmissione fisso o variabile in modo discontino
o, anche, in modo ciclico.
5
Le ruote dentate cilindriche possono essere anche non circolari
per realizzare un rapporto di trasmissione variabile in modo ciclico
Negli ingranaggi la trasmissione del
moto avviene tra due profili coniugati
che si scambiano forze normali, a
meno di piccole componenti di attrito.
Profilo cicloidale:
ottenuto facendo
rotolare una
circonferenza sul
cerchio base.
La sezione del dente è
ottenuta con due archi
di profili cicloidali
raccordati in testa da
un arco di cerchio
6
Negli ingranaggi la trasmissione del
moto avviene tra due profili coniugati
che si scambiano forze normali, a
meno di piccole componenti di attrito.
Profilo cicloidale:
ottenuto facendo
rotolare una
circonferenza sul
cerchio base.
Una classica applicazione dei profili cicloidali
sono i compressori volumetrici Root
Negli ingranaggi la trasmissione del
moto avviene tra due profili coniugati
che si scambiano forze normali, a
meno di piccole componenti di attrito.
Profilo ad evolvente:
ottenuto facendo rotolare una retta
sul cerchio base.
7
Negli ingranaggi la trasmissione del
moto avviene tra due profili coniugati
che si scambiano forze normali, a
meno di piccole componenti di attrito.
Profilo ad evolvente:
ottenuto facendo rotolare una retta
sul cerchio base.
Negli ingranaggi la trasmissione del
moto avviene tra due profili coniugati
che si scambiano forze normali, a
meno di piccole componenti di attrito.
Circonferenze base
20
°
Profilo ad evolvente:
ottenuto facendo rotolare una retta
sul cerchio base.
8
Negli ingranaggi la trasmissione del
moto avviene tra due profili coniugati
che si scambiano forze normali, a
meno di piccole componenti di attrito.
r1
A
M
Circonferenze
di troncatura
rapportoMN
di è
LaIldistanza
trasmissione
usualmente indicata con il
vale
simbolo λ
20
°
r1 2
r2 1
N
B
r2
rb
Negli ingranaggi la trasmissione del
moto avviene tra due profili coniugati
che si scambiano forze normali, a
meno di piccole componenti di attrito.
A
M
Circonferenze
di troncatura
La distanza MN è
usualmente indicata con il
simbolo λ
20
°
N
B
r
rb
9
Negli ingranaggi la trasmissione del
moto avviene tra due profili coniugati
che si scambiano forze normali, a
meno di piccole componenti di attrito.
A
M
Circonferenze
Per ottenere le
di troncatura
dentature interne
si utilizzano
ancora gli stessi
profili coniugati ma
il materiale occupa
la zona che nel
caso precedente
costituiva il vano
tra i denti
20
°
N
B
r
rb
Nomenclatura
z = numero di denti
d =diametro primitivo
Passo p distanza tra due profili omologhi misurata lungo la circonferenza primitiva
Modulo
m = p/π
m
Addendum
Dedendum
ha= m
hf= 1.25 m
m = d/z
Vano tra
i denti
p
2 r
z
Proporzionamento modulare
Passo primitivo
Superficie di testa
Spessore
del dente
Larghezza
del dente
Fianco di testa
Cilindro di testa
Fianco di piede
Superficie di fondo
Addendum
Dedendum
Cerchio
Primitivo
Cilindro di
piede
Cerchio
Base
Passo base
10
Nomenclatura
z = numero di denti
d =diametro primitivo
Passo p distanza tra due profili omologhi misurata lungo la circonferenza primitiva
Modulo
m = p/π
m
Passo base pb
2 r
z
m = d/z
distanza tra due profili omologhi misurata sul piano base
ovvero lungo la retta d’azione
rb r cos
p
pb
2 rb
z
pb p cos
Nomenclatura
z = numero di denti
Modulo
m
d =diametro primitivo
m = p/π
m = d/z
Proporzionamento modulare
Addendum
ha= m
hf = 1.25 m
Altezza del dente h = 2.25 m
Raggio di troncatura esterna ra = r + ha
Raggio di troncatura interna rf = r – hf
z z2
Interasse di funzionamento i 1
2m
2 r1
Rapporto di trasmissione
1 r2
Dedendum
Passo p
2 r
Passo base pb
z
2 rb
z
rb r cos
r
raggio primitivo
pb p cos
θ
angolo di pressione
Grado di ricoprimento
(detto anche rapporto di condotta)
pb
pb
N
M
λ
Perché ci sia continuità del moto
deve essere: λ ≥ 1
11
Nomenclatura
z = numero di denti
Modulo
m
d =diametro primitivo
m = p/π
m = d/z
Proporzionamento modulare
Addendum
ha= m
hf = 1.25 m
Altezza del dente h = 2.25 m
Raggio di troncatura esterna ra = r + ha
Raggio di troncatura interna rf = r – hf
z z2
Interasse di funzionamento i 1
2m
2 r1
Rapporto di trasmissione
1 r2
Dedendum
Passo p
2 r
z
Passo base pb
2 rb
z
rb r cos
r
raggio primitivo
pb p cos
θ
angolo di pressione
Grado di ricoprimento
(detto anche rapporto di condotta)
Condizione di non interferenza
z1
2
pb
sen 2 2 1 1
sen 2
2
Nella condizione di ingranamento con la
dentiera:
z1
r2 =∞
2
17
sen 2
τ = r1 /r2 =0
per
si ha:
θ = 20°
I vantaggi dei profili ad evolvente sono molti,
a cominciare dal modo in cui possono essere costruiti.
Il modo apparentemente più semplice di
realizzare una ruota dentata è quello di
asportare il materiale per creare il cavo
tra i denti partendo da un tondo il cui
diametro sia quello di troncatura esterna
della dentatura.
In questo modo però è necessario avere
un utensile conformato in modo
particolare che sarà utilizzabile solo per
costruire ruote con un determinato
modulo e diametro.
12
Un grande vantaggio della profilatura ad evolvente di cerchio
consiste nella possibilità di realizzare i denti per inviluppo,
ovvero con un movimento mutuo tra utensile e ruota simile a quello di ingranamento.
r = v/ω
r
Dentiera:
ruota di raggio infinito
ω
v
Un grande vantaggio della profilatura ad evolvente di cerchio
consiste nella possibilià di realizzare i denti per inviluppo,
ovvero con un movimento mutuo tra utensile e ruota simile a quello di ingranamento.
Con una dentiera utensile di modulo m è possibile costruire qualsiasi ruota
con tale modulo, indipendentemente dal diametro e dal numero di denti.
Modulo
Linea dei dati: pieni = vuoti
m = p/π
Passo p
ha= 1.25 m
hf = 1.0 m
Il proporzionamento modulare
dell’utensile è inverso, per quel
che riguarda addendum e
dedendum, rispetto alla dentatura
normale.
13
Un grande vantaggio della profilatura ad evolvente di cerchio
consiste nella possibilià di realizzare i denti per inviluppo,
ovvero con un movimento mutuo tra utensile e ruota simile a quello di ingranamento.
Con una dentiera utensile di modulo m è possibile costruire qualsiasi ruota
con tale modulo, indipendentemente dal diametro e dal numero di denti.
r
ω
ha= 1.25 m
hf = 1.0 m
v
r = v/ω
Il diametro della primitiva è stabilito dal rapporto tra
la velocità di avanzamento dell’utensile
e la velocità di rotazione della ruota da costruire
Il rapporto tra la rotazione ω della ruota costruenda e l’avanzamento v della dentiera utensile
è stabilito dalla catena cinematica della macchina dentatrice.
d
2v
v
Imposto dalla
cinematica
Schema del cinematismo di
una macchina dentatrice
v
14
Un grande vantaggio della profilatura ad evolvente di cerchio
consiste nella possibilià di realizzare i denti per inviluppo,
ovvero con un movimento mutuo tra utensile e ruota simile a quello di ingranamento.
Con una dentiera utensile di modulo m è possibile costruire qualsiasi ruota
con tale modulo, indipendentemente dal diametro e dal numero di denti.
ω
r
ha= 1.25 m
hf = 1.0 m
v
Se, mantenendo costante il rapporto v/ω, la ruota costruenda viene spostata in
direzione normale all’utensile, allontanandola o avvicinandola ad esso, la
geometria della dentatura ne risulta alterata ma le primitiva rimane invariata.
Un grande vantaggio della profilatura ad evolvente di cerchio
consiste nella possibilià di realizzare i denti per inviluppo,
ovvero con un movimento mutuo tra utensile e ruota simile a quello di ingranamento.
Con una dentiera utensile di modulo m è possibile costruire qualsiasi ruota
con tale modulo, indipendentemente dal diametro e dal numero di denti.
Il diametro di troncatura
esterna va adeguato alle
dimensioni modificate
ω
s
v
r
s = spostamento
x = s/m
spostamento
relativo
ha= 1.25 m
hf = 1.0 m
Se, mantenendo costante il rapporto v/ω, la ruota costruenda viene spostata in
direzione normale all’utensile, allontanandola o avvicinandola ad esso, la
geometria della dentatura ne risulta alterata ma le primitiva rimane invariata.
15
Un grande vantaggio della profilatura ad evolvente di cerchio
consiste nella possibilià di realizzare i denti per inviluppo,
ovvero con un movimento mutuo tra utensile e ruota simile a quello di ingranamento.
Con una dentiera utensile di modulo m è possibile costruire qualsiasi ruota
con tale modulo, indipendentemente dal diametro e dal numero di denti.
Il diametro di troncatura
esterna va adeguato alle
dimensioni modificate
ω
s = spostamento
x = s/m
r
spostamento
relativo
s
ha= 1.25 m
hf = 1.0 m
v
Se, mantenendo costante il rapporto v/ω, la ruota costruenda viene spostata in
direzione normale all’utensile, allontanandola o avvicinandola ad esso, la
geometria della dentatura ne risulta alterata ma le primitiva rimane invariata.
Taglio per
generazione
di ruote
cilindriche con
profili ad
evolvente di
cerchio.
Per realizzare una ruota a dentatura
elicoidale può essere ancora utilizzato
la stessa dentiera utensile:
è sufficiente inclinarla dell’angolo β
Taglio per generazione
16
Un grande vantaggio della profilatura ad evolvente di cerchio
consiste nella possibilià di realizzare i denti per inviluppo,
ovvero con un movimento mutuo tra utensile e ruota simile a quello di ingranamento.
Taglio di una ruota cilindrica
a denti elicoidali
La dentatura viene ancora creata
per inviluppo ma la dentiera è
inclinata dell’angolo β.
Taglio per
generazione
di ruote
cilindriche con
profili ad
evolvente di
cerchio.
17
Taglio per
generazione
di ruote
cilindriche con
profili ad
evolvente di
cerchio.
Il taglio è oggi generalmente eseguito con un utensile rotante detto “creatore”.
I fianchi dei denti del “creatore”sono equivalenti ad una
dentiera utensile.
Moto di taglio
del “creatore”
18
Ad ogni valore del modulo con il quale si vuol costruire una ruota dentata corrisponde un
utensile. È evidente, quindi, che conviene normalizzare i valori del modulo.
Dimensioni normalizzate in mm
Nella tabella sono riportati i
valori normalizzati tra 1e 20 mm.
I colori contraddistinguono i
valori consigliati, sconsigliati
o fortemente sconsigliati.
1
1.125 1.25 1.375 1.50
1.75
2
2.25
2.5
2.75
3
3.25
3.5
3.75
4
4.5
5
5.5
6
6.5
7
8
9
10
11
12
14
16
18
20
Il progetto o la verifica di una coppia di ruote dentate, dal punto di vista della resistenza
strutturale, si basa sulla valutazione delle possibili avarie.
Quelle che più frequentemente si verificano nell’esercizio delle trasmissioni di potenza per
ingranaggi sono:
1) L’erosione superficiale per eccessiva pressione di contatto tra i fianchi dei denti: il
cosiddetto fenomeno del “pitting”.
2) La rottura a fatica per flessione del dente.
3) L’eccessivo surriscaldamento della zona di contatto tra i denti a causa di
insufficiente lubrificazione che comporta microfusioni locali, con profonda alterazione
della geometria delle superfici coniugate.
19
Dimensionamento in base alla pressione di contatto
Il progetto consiste nel calcolare le dimensioni delle ruote in modo da
limitare la pressione di contatto tra i fianchi dei denti ad un valore
ammissibile in base alle caratteristiche del materiale ed alla durata prevista.
Effetti del “pitting” su un ingranaggio
Dimensionamento in base alla pressione di contatto
Per la valutazione della pressione di contatto si utilizza la teoria di Hertz.
Il comportamento dei fianchi dei denti è rappresentato, in modo approssimato, dai due
cilindri osculatori che hanno, nella zona di contatto, la stessa curvatura dei profili coniugati.
20
Dimensionamento in base alla pressione di contatto
Per la valutazione della pressione di contatto si utilizza la teoria di Hertz.
Il comportamento dei fianchi dei denti è rappresentato, in modo approssimato, dai due
cilindri osculatori che hanno, nella zona di contatto, la stessa curvatura dei profili coniugati.
Dimensionamento in base alla pressione di contatto
Per la valutazione della pressione di contatto si utilizza la teoria di Hertz.
Il comportamento dei fianchi dei denti è rappresentato, in modo approssimato, dai due
cilindri osculatori che hanno, nella zona di contatto, la stessa curvatura dei profili coniugati.
21
Dimensionamento in base alla pressione di contatto
Per la valutazione della pressione di contatto si utilizza la teoria di Hertz.
Il comportamento dei fianchi dei denti è rappresentato, in modo approssimato, dai due
cilindri osculatori che hanno, nella zona di contatto, la stessa curvatura dei profili coniugati.
Dimensionamento in base alla pressione di contatto
Ingranaggi cilindrici a denti dritti
22
Dimensionamento in base alla pressione di contatto
In base alla teoria di Hertz la massima
tensione di contatto che si genera tra due
cilindri di lunghezza indefinita è data dalla
relazione:
H2
denti dritti
F
q R1 R2 E1 E2
R1 R2 E1 E2
R2
dove
q
F
L
L
R1 ed R2 sono i raggi dei cilindri a contatto
E
E
1 2
è il modulo di elasticità
a contrazione laterale
impedita
R1
F
Dimensionamento in base alla pressione di contatto
In base alla teoria di Hertz la massima
tensione di contatto che si genera tra due
cilindri di lunghezza indefinita è data dalla
relazione:
H2
q
denti dritti
F
q R1 R2 E1 E2
R1 R2 E1 E2
R2
F
L
I moduli di elasticità vengono
raggruppati in un’unica quantità:
L
1 E E
KE 1 2
E1 E2
Se il materiale delle due ruote è
lo stesso: E’1 = E’2
R1
KE
E
2
F
23
denti dritti
Dimensionamento in base alla pressione di contatto
Valutazione dei raggi R1 e
R2 :
Lunghezza del segmento AB
A B r1 sen r2 sen
ϑ
B
r2b
r1
r1b
Circonferenze base
r2
ϑ
A
Circonferenze primitive
denti dritti
Dimensionamento in base alla pressione di contatto
Valutazione dei raggi R1 e
Calcolo del raggio relativo
r ABr sen
R1 R2
1 2
sen
R1 R2
x xr1(
r2
AB
x) x
R2 :
Lunghezza del segmento AB
A B r1 sen r2 sen r1 r2 sen
ϑ
B
r2b
r1
Circonferenze base
r1b
r2
A
ϑ
x
Circonferenze primitive
Si considerino due qualsiasi profili in contatto
La loro posizione sul segmento di ingranamento è data dall’ascissa x
24
denti dritti
Dimensionamento in base alla pressione di contatto
Valutazione dei raggi R1 e
Calcolo del raggio relativo
r1 r2 sen
R1 R2
R1 R2
x r1 r2 sen x
R2 :
Lunghezza del segmento AB
A B r1 sen r2 sen r1 r2 sen
ϑ
B
r2b
r1
r1b
Circonferenze base
r2
ϑ
A
Circonferenze primitive
Si considerino due qualsiasi profili in contatto
La loro posizione sul segmento di ingranamento è data dall’ascissa x
denti dritti
Dimensionamento in base alla pressione di contatto
Valutazione dei raggi R1 e
Calcolo del raggio relativo
r1 r2 sen
R1 R2
R1 R2
x r1 r2 sen x
Lunghezza del segmento AB
A B r1 sen r2 sen r1 r2 sen
r1 r2 sen
ϑ
B
r1 sen r2 sen
r1 r2
r1r2 sen
Circonferenze base
R2 :
r2b
r1
r1b
r2
ϑ
A
Circonferenze primitive
Quando i due profili si trovano nel punto C di tangenza tra le primitive
nell’espressione del raggio relativo si elimina l’incognita x
25
denti dritti
Dimensionamento in base alla pressione di contatto
H2
q R1 R2 E1 E2
R1 R2 E1 E2
L’andamento della pressione di contatto durante
l’ingranamento dipende unicamente dal raggio relativo
Andamento della pressione di contatto
durante l’ingranamento
Quantità non dipendenti da x
λ
r1 r2 sen
x r1 r2 sen x
r r
R1 R2
1 2
r1r2 sen
R1 R2
Pressione di contatto
Raggio relativo
pb
pb
2 coppie
in presa
A
1 coppia
in presa
M
2 coppie
in presa
C
N
denti dritti
Dimensionamento in base alla pressione di contatto
q R R2 E1 E2
1
R1 R2 E1 E2
2
H
q
F
L
KE
1 E1 E2
E1 E2
H2 K E
F r1 r2
L r1 r2 sen
R1 R2
r r
1 2
R1 R2
r1r2 sen
H2 K E
FC
r1 r2
L sen cos r1 r2
H2 K E
2 FC
21
L sen 2 d1
FC
cos
r1
r2
4 K E FC 1
sen 2 L d1
B
x
Posizione sul segmento AB
F
FC F cos
2
H
ϑ
F
FC
26
denti dritti
Dimensionamento in base alla pressione di contatto
H2
4 K E FC 1
sen 2 L d1
L
d
Basso valore di φ
H2
4 K E FC 1
sen 2 d12
H2
4 K E 60 W 1
sen 2 n1 d13
H2
m3
il valore di
4 K E 60 W 1
sen 2 n1 m 3 z13
φ
L d
Alto valore di
φ
è generalmente compreso tra 0.5 ed 1
È conveniente esprimere la forza tangenziale FC
in funzione della potenza da trasmettere
FC
4 K E 60 W 1
sen 2 n1 z13 02
W 2
1 d1
W
60 W 2
60 W
n1d1
2 n1 d1
Può essere conveniente, infine, esprimere il
diametro attraverso il modulo ed il numero di denti:
m= d / z
denti dritti
Dimensionamento in base alla pressione di contatto
H2
4 K E 60 W 1
sen 2 n1 d13
m3
4 K E 60 W 1
sen 2 n1 z13 02
3
HB 10 7 10
0
3 60 n1 h
z1min
m
unificazione
mu
d1u
Diametro pignone d1
21 x
sen 2
z1
z2
z2 deve essere
un numero intero
Diametro ruota d2
Larghezza fascia dentata L
Interasse
i
Eventuale spostamento relativo
x
27
Dimensionamento in base alla pressione di contatto
Ingranaggi cilindrici a denti elicoidali
La teoria di Hertz può essere ancora utilizzata
nel caso di dentature elicoidali.
H2
q R1 R2 E1 E2
R1 R2 E1 E2
Formalmente la relazione di progetto è diversa
da quella ricavata nel caso di dentatura dritta,
essendo diversa la geometria del contatto.
Dimensionamento in base alla pressione di contatto
denti elicoidali
Il fattore dipendente dal
materiale non varia
rispetto al caso dei denti
dritti.
KE
1 E1 E2
E1 E2
Si modificano invece i fattori che
dipendono dalla forza applicata e
dalla geometria del dente
q
F
L
R1 R2
R1 R2
28
denti elicoidali
Dimensionamento in base alla pressione di contatto
Analisi delle forze
agenti sul dente
r
piano base
B
Fr
α0
F ϑ
n
C
ϑ
FC
t
E
α
Fπ
Fa
A
piano tangente
alle primitive
D
a
F
Fπ F cos θ n
Fa Fπ sen F cos θ n sen
Fr F sen θ n
FC Fπ cos F cos θ n cos
FC
denti elicoidali
Dimensionamento in base alla pressione di contatto
Analisi delle forze
agenti sul dente
2W
60W
ωd πnd
r
piano base
B
Fr
α0
F ϑ
n
C
Fa
Fπ F cos θ n
a
F
Fr F sen θ n
Fπ
ϑ
A
FC
α
FC
F
cos cos θ n
t
E
piano tangente
alle primitive
D
FC
tan θn
sen θ n FC
Fr
cos cos θ n
cos
FC
2W
60W
ωd πnd
Fa FC tan
29
denti elicoidali
Dimensionamento in base alla pressione di contatto
r
Analisi delle forze
agenti sul dente
Il triangolo CDA
CBA
CED èè rettangolo
rettangolo in
in B
D
CEB
E
piano base
B
Fr
α0
F ϑ
n
C
ϑ
FC
Valore unificato
tan θn 20
D
a
tan θ
BE
CE
tan θn
1
CD
tan θ BE CD
CE
cos
tan θn CE AD
AD
CD
t
E
α
Fπ
Fa
A
tan θ
tan θn
cos
BE AD
CE CD cos
denti elicoidali
Dimensionamento in base alla pressione di contatto
r
Analisi delle forze
agenti sul dente
piano base
B
Fr
α0
F ϑ
n
C
Fa
ϑ
A
FC
E
α
Fπ
Valore unificato
D
a
sen 0
AB
CA
DE
sen
CD
CD CA cos θn
sen 0 AB CD
CD
cos θn
sen CA DE
CA
AB DE
t
tan θn 20
sen 0 sen cos θn
cos 0 1 sen 2 cos 2 θn
30
denti elicoidali
Dimensionamento in base alla pressione di contatto
Lunghezza del
contatto
Linea di contatto
denti elicoidali
Dimensionamento in base alla pressione di contatto
Lunghezza del
contatto
ϑ
α0
M’
Pbn
A
M
Pbn Pb cos 0
Pb
λ
M
C
O1
Nella dentatura
elicoidale il grado di
ricoprimento ha anche
una componente
assiale, oltre che
trasversale
a
t
tan 0
L
L
Pa
Pb
Pb
t a
CO2
N
B
N
Area del rettangolo λ
L
N’
L
L lc Pbn
lc
L
Pbn
L
Pb cos 0
t
Pb
lc
t L
cos 0
31
Dimensionamento in base alla pressione di contatto
denti elicoidali
Raggio relativo
Piano base
Larghezza della fascia dentata
A´
R1 R2
R1 R2
B´
C1
C2 C BC
C
C1´
C2´
C1C
C1C
AC
cos 0
cos 0
C2 C
C2 C
BC
cos 0 cos 0
C1C AC
C2
α0
A
B
AC
BC
Dimensionamento in base alla pressione di contatto
A´
B´
C1
C1´
R1
C
denti elicoidali
Raggio relativo
R1 R2
R1 R2
C2´
R2
C2
α0
B
A
I raggi di curvatura delle
superfici coniche nel
punto C valgono:
R1 C1C
AC
cos 0
R2 C2C
BC
cos 0
32
denti elicoidali
Dimensionamento in base alla pressione di contatto
ϑ
t
Raggio relativo
R1 R2
R1 R2
A
ϑ
O1
C1C
r1
r2
C
ϑ
C2 C
O2
B
t
I raggi di curvatura delle
superfici coniche nel
punto C valgono:
r r cos 0 1 cos 0
R1 R2
1 2
R1 R2
r1r2 sen θ
r1 sen θ
R1 C1C
AC
cos 0
AC r1 sen θ
R1 r1
sen θ
cos 0
R2 C2C
BC
cos 0
BC r2 sen θ
R2 r2
sen θ
cos 0
denti elicoidali
Dimensionamento in base alla pressione di contatto
H2
q R1 R2 E1 E2
R1 R2 E1 E2
F
q
FC
cos cos θ n
t L
cos 0
FC cos 0
q
t L cos θn cos
lc
1 E E
KE 1 2
E1 E2
R1 R2 1 cos 0
R1 R2
r1 sen θ
FC
H2 K E
2W
60W
ωd πnd
1
FC cos 2 0
t L cos θn cos r1 sen θ
sen θ
H2 K E
sen θn
cos 0
r1
d1
2
FC cos 3 0
21
t L sen θn cos θn cos d1
2 sen θn cos θn sen 2θn
H2
4 K E FC cos 3 0 1
sen(2θn ) Ld1 cos t
H2
1
4 K E FC
sen( 2θn ) Ld1
t
33
denti elicoidali
Dimensionamento in base alla pressione di contatto
H2
q R1 R2 E1 E2
R1 R2 E1 E2
F
q
H2 K E
FC
cos cos θ n
H2
L
lc t
cos 0
FC cos 0
q
t L cos θn cos
KE
1 E1 E2
E1 E2
1
4 K E FC
sen( 2θn ) Ld1
t
cos 3 0
cos
cos 0 1 sen 2 cos 2 θn
R1 R2 1 cos 0
R1 R2
r1 sen θ
FC
1
FC cos 2 0
t L cos θn cos r1 sen θ
sen 0 sen cos θn
( n , ) 1 sen 2 cos 2 n
2W
60W
ωd πnd
1 sen 2 n tan 2
Dimensionamento in base alla pressione di contatto
denti elicoidali
Relazione di progetto / verifica
H2
1
4 K E FC
sen( 2θn ) Ld1
t
FC
2W
60W
ωd πnd
Condizione sul numero di denti del pignone
z1
2(1 x)
cos 1 sen 2 cos 2 n
sen 2 n
Grado di ricoprimento trasversale
t
z1 2 cos 2 z12 cos2 z2 2 cos 2 z22 cos 2 z1 z2 sen
2π cos
sen θ
sen θn
1 sen 2 cos 2 θn
cos θ
cos cos θn
1 sen 2 cos 2 θn
34
Dimensionamento in base alla sollecitazione di flessione
Relazione di Lewis
θ
F
β
Fr
denti dritti
F
Ft
ϑ Ft
FC
β
δ
h0
FC
f
Trave ad
uniforme
resistenza
f
g0
++
Mf
Wf
Ft h
1 2
Lg
6
FC 6h0 FC 6h0 m FC 6h0 m
Lg 02 m
Lm g 02
Lg 02
f
––
FC
Y f Lm
Yf
g 02
6h0 m
–
Dimensionamento in base alla sollecitazione di flessione
Relazione di Lewis
Yf
Il fattore di forma
denti dritti
g 02
6h0 m
Yf dipende del numero di denti, dall’angolo ϑ
e dallo spostamento relativo x
Yf
Variazione della
forma del dente per
valori di z crescente
x >0
x =0
x <0
z numero di denti
35
denti dritti
Dimensionamento in base alla sollecitazione di flessione
Relazione di Lewis
Valori del fattore di forma Yf relativo a ϑ = 20°
in funzione del numero di denti e dello spostamento relativo x
Denti dritti, z1=18, x=0
Fattore Yf = 0.34
Dimensionamento in base alla sollecitazione di flessione
Relazione di Lewis
r
Dentatura elicoidale
piano base
B
Fr
α0
F ϑ
n
C
Fa
ϑ
Fπ
A
FC
E
t
α
D
a
La forza agisce sul dente
perpendicolarmente ad esso
FC
cos
Nel caso dei denti obliqui deve essere
quindi considerata la Fπ in luogo della FC
Fπ
Inoltre deve essere considerato il modulo
normale mn in luogo del modulo m
mn m cos
36
denti elicoidali
Dimensionamento in base alla sollecitazione di flessione
Relazione di Lewis
Lunghezza del contatto:
lc
r
t L
cos 0
lc lc cos
lc lc
B
cos
cos 0
ϑ
α0
l’c
t
D
Dal triangolo BCD si ha:
α
ε
C
a
A
BC CD cos
Dai triangoli ABC e ACD si ha:
AC BC cos 0
AC CD cos
BC
cos
CD
BC cos 0 CD cos
cos
BC
cos 0
CD
cos
cos
cos 0
Dimensionamento in base alla sollecitazione di flessione
denti elicoidali
Relazione di Lewis
f
FC
Y f Lm
Fπ
FC
cos
f
Fπ
Y f lc mn
f
FC
cos 2 0
Y f t L mn cos 2
f
FC
, θn
Y f t L mn
mn m cos
cos
lc lc
cos 0
lc
t L
cos 0
(θn , )
lc
t L cos
cos 2 0
1 sen 2 cos 2 θn
cos 2
37
denti elicoidali
Dimensionamento in base alla sollecitazione di flessione
Nel caso dei denti elicoidali il fattore di forma Yf può ancora essere ricavato dalle
curve relative ai denti dritti, purché si utilizzi un numero di denti fittizio z’
Cilindro primitivo
r
z
d
m
r’
α
r
z
r
cos 2
d
mn cos 2
d
m cos 3
d
z
m
mn m cos
z
z
cos 3
Il fattore di forma del dente obliquo
è migliore del corrisponente dente
dritto, perché è ottenuto da una
circonferenza primitiva maggiore di
quella reale.
Dimensionamento in base alla sollecitazione di flessione
denti elicoidali
Nel caso dei denti elicoidali il fattore di forma Yf può ancora essere ricavato dalle
curve relative ai denti dritti, purché si utilizzi un numero di denti fittizio z’
Esempio:
per z = 20 α= 30° x = 0
z
20
30.8
cos 3 30
Fattore Yf per dentatura elicoidale = 0.395
Fattore Yf per dentatura dritta = 0.353
38
39
40
Ingranaggi: esercitazione
H2
4 K E 60 W 1
sen 2 n1 d13
m3
4 K E 60 W 1
sen 2 n1 z13 02
DATI:
P = 15 kw
n1 = 2900 g/m
n2 = 1450 g/m
durata = 5000 ore
E1 = E2 = 200E9 Pa
ν = 0.3
σR= 800 MPa σS= 650 MPa
3
σLF= 310 MPa
HB 10 7 10
0
3 60 n1 h
HB = 4.50E9 Pa
θ = 20°
f
FC
Y f Lm
z1min
z1
z2
21 x
sen 2
z2 deve essere
un numero intero
41