Spazi di Haar e polinomi in più variabili
Davide Boscaini
Queste sono le note da cui ho tratto il seminario del giorno 25 Ottobre 2011. Per
scriverle mi sono basato sul secondo capitolo del testo Scattared Data Approximation di Holger Wendland. Invito chi trovasse eventuali errori a segnalarli presso
[email protected].
Durante il corso di Calcolo Numerico, nello studio della teoria dell’interpolazione
polinomiale in una variabile, abbiamo studiato il seguente
Teorema 1. Dati N siti distinti x1 < x2 < · · · < xN ed N valori y1 , . . . , yN , esiste un
unico polinomio p ∈ πN −1 (R) che soddisfa le condizioni di interpolazione
p(xi ) = yi
i = 1, . . . , N.
Un aspetto che rende interessante questo teorema, oltre al risultato di esistenza ed
unicità, in sé stesso molto interessante, riguarda il fatto che lo spazio πN −1 (R) non dipende
né dalla particolare scelta dei siti xi , i = 1, . . . , N , né dai particolari valori yi , i = 1, . . . , N ,
che vogliamo interpolare, ma solo dal numero dei siti. Segue quindi che, in dimensione uno,
si può scegliere lo spazio in cui vivono le interpolanti indipendentemente dalla scelta dei
siti di interpolazione. Nella teoria dell’approssimazione il concetto di quando uno spazio è
indipendente dai dati scelti è stato generalizzato e riguarda l’argomento di cui vogliamo
parlare in questo breve seminario. Sfortunatamente quello che vedremo è che il caso in più
variabili presenterà alcune difficoltà e la situazione non sarà, in generale, cosı̀ favorevole
come quella del caso unidimensionale.
1
Il teorema di Mairhuber-Curtis
Motivati dal caso unidimensionale diamo la seguente
Definizione 1. Supponiamo che Ω ⊆ Rd contenga almeno N punti. Sia V ⊆ C 0 (Ω) uno
spazio lineare di dimensione N . Allora V è detto spazio di Haar di dimensione N su
Ω se, considerati N siti distinti ~x1 , . . . , ~xN ∈ Ω e valori arbitrari y1 , . . . , yN ∈ R, esiste
esattamente una funzione s ∈ V tale che
s(~xi ) = yi
i = 1, . . . , N.
Per quanto visto nell’introduzione segue che V = πN −1 (R) è uno spazio di Haar di
dimensione N per ogni sottoinsieme Ω ⊆ R che contenga almeno N punti.
Gli spazi di Haar, talvolta detti anche spazi di Chebyshev, possono essere caratterizzati
in molti modi. Ad esempio come
Teorema 2. Sotto le ipotesi della definizione 1 i seguenti enunciati sono equivalenti
(i) V è uno spazio di Haar di dimensione N ;
1
(ii) ogni u ∈ V \ {~0} ha al più N − 1 zeri;
(iii) per ogni n-pla di punti distinti x1 , . . . , xN ∈ Ω e ogni base u1 , . . . , uN di V , considerata
la matrice
u1 (x1 ) u2 (x1 ) . . . uN (x1 )
u1 (x2 ) u2 (x2 ) . . . uN (x2 )
A := .
,
..
..
.
.
.
.
.
.
.
u1 (xN ) u2 (xN ) . . . uN (xN )
cioè Aij = uj (xi ), si ha che
det (A) 6= 0.
Dimostrazione. (i) ⇒ (ii) Sia V uno spazio di Haar di dimensione N e supponiamo per
assurdo che esista una funzione u ∈ V \ {~0} che abbia gli N zeri x1 , . . . , xN . In questo
caso sia u che la funzione identicamente nulla interpolano valori nulli in questi siti.
Ma per ipotesi siamo in uno spazio di Haar, quindi abbiamo unicità dell’interpolante:
possiamo quindi concludere che u ≡ 0, assurdo. Segue quindi che u può avere al
massimo N − 1 zeri.
(ii) ⇒ (iii) Supponiamo ora che la seconda proprietà sia soddisfatta. Se det (A) = 0, con
Aij = uj (xi ), allora esiste un vettore b ∈ RN \ {~0} tale che Ab = 0, cioè
N
X
bj uj (xi ) = 0
per ogni i = 1, . . . , N.
j=1
P
Ma allora la funzione u := N
j=1 bj uj ha N zeri e quindi, per quanto visto nel punto
precedente, dev’essere identicamente nulla, ma questo è impossibile perché per ipotesi
b 6= ~0.
(iii) ⇒ (i) Infine, se la terza proprietà è soddisfatta, allora possiamo supporre che l’interpolante sia della forma
N
X
u=
cj uj ,
j=1
per qualche coefficiente cj ∈ R, j = 1, . . . , N , possiamo cioè pensare u come combinazione lineare di autovettori di V . In tal caso le condizioni di interpolazione
sono
N
X
bj uj (xi ) = yi per i = 1, . . . , N.
j=1
Ma dal momento che, per ipotesi, det (A) =
6 0, i coefficienti bj sono univocamente
determinati e, di conseguenza, anche la funzione
u=
N
X
cj uj ,
j=1
è unica. Questo ci permette di concludere che u appartiene ad uno spazio di Haar di
dimensione N .
2
Esempio 1. Sia d = 2 ed N = 3. Consideriamo poi lo spazio V ⊆ C 0 (R2 ) di base
{u1 , u2 , u3 } = {1, x, y}, con u1 : (xi , yi ) 7→ 1, u2 : (xi , yi ) 7→ xi e u3 : (xi , yi ) 7→ yi , e i siti
~x1 = (x1 , y1 ), ~x2 = (x2 , y2 ) e ~x3 = (x3 , y3 ). Per il teorema 2 si ha che V è uno spazio di
Haar di dimensione 3 per ogni Ω ⊆ R2 se
u1 (x1 , y1 ) u2 (x1 , y1 ) u3 (x1 , y1 )
det (A) = det u1 (x2 , y2 ) u2 (x2 , y2 ) u3 (x2 , y2 )
u1 (x3 , y3 ) u2 (x3 , y3 ) u3 (x3 , y3 )
1 x1 y1
= det 1 x2 y2
1 x3 y3
1
x1
y1
= det 0 x2 − x1 y2 − y1
0 x 3 − x 1 y3 − y1
x2 − x1 y2 − y1
= det
x3 − x1 y3 − y1
= ±2 area(T ),
con T triangolo formato dal vettore di vertici (x1 , y1 ) e (x2 , y2 ) con il vettore di vertici
(x1 , y1 ) e (x3 , y3 ). E quindi tale determinante è nullo se e solo se i tre punti sono allineati,
segue quindi che questo spazio, non soddisfando la condizione (iii) del teorema 2, non può
essere uno spazio di Haar.
Dopo aver caratterizzato gli spazi di Haar, ci dedichiamo alla questione di quando esiste
uno spazio di Haar in dimensione alta. Il prossimo risultato mostra che questo è possibile
solo in semplici situazioni
Teorema 3 (di Mairhuber-Curtis). Se Ω ⊆ Rd , d ≥ 2 contiene un punto interno, allora
non esiste uno spazio di Haar su Ω di dimensione N ≥ 2.
Dimostrazione. Supponiamo per assurdo che V = span{u1 , . . . , uN } sia uno spazio di Haar
su Ω. Se Ω contiene un punto interno ~x0 , allora esiste δ ∈ R, δ > 0, tale che la palla
B(~x0 , δ) ⊆ Ω. Fissiamo ora N − 2 punti distinti ~x3 , . . . , ~xN ∈ B(~x0 , δ) e scegliamo due
curve continue ~x1 (t) e ~x2 (t), t ∈ [0, 1], contenute in B(~x0 , δ) tali che ~x1 (0) = ~x2 (1) e
~x2 (0) = ~x1 (1), non abbiamo altri punti di intersezione e non abbiano punti in comune con
{~x3 , . . . , ~xN }. Questo è possibile perché d ≥ 2. Ora, dal momento che abbiamo assunto
che U sia uno spazio di Haar su Ω, per definizione la funzione
D(t) := det (A)
è continua e non cambia segno. D’altronde D(1) = −D(0) perché a t = 1 abbiamo
scambiato le prime due righe della matrice. Quindi D deve cambiare segno e quindi, per il
teorema degli zeri esiste un 0 < t̃ < 1 tale che D(t̃) = 0. Assurdo.
2
Polinomi in più variabili
Finora abbiamo visto che, al contrario di quanto succedeva per il caso unidimensionale, i polinomi in più variabili non formano uno spazio di Haar. È quindi impossibile
interpolare un qualsiasi insieme di dati su un generico insieme di siti X = {~x1 , . . . , ~xQ },
Q = dim πm (Rd ), con polinomi di πm (Rd ). Nonostante questo l’interpolazione polinomiale
3
gioca comunque un ruolo importante nel caso di più variabili: dovremo solo restringerci
all’insieme dei siti per i quali è possibile individuare univocamente tale interpolante. Questo
è l’argomento principale di questa sezione.
Lemma 4. Per d = 1, 2, 3, . . . e m = 0, 1, 2, . . . abbiamo
m X
k+d
k=0
d
m+1+d
=
.
d+1
Dimostrazione. Proviamo questo lemma tecnico per induzione sul grado dei polinomi m.
Per m = 0 la cosa è banale, per le proprietà del coefficiente binomiale infatti vale
d
d+1
1=
=
= 1.
d
d+1
Supponiamo ora che sia valida la tesi per il grado m e proviamo che questo ci permette di
concludere che il risultato valga anche per il grado m + 1. Scriviamo
m+1
X
k=0
X
m k+d
k+d
m+1+d
=
+
d
d
d
k=0
m+1+d
ip.ind. m + 1 + d
=
+
d+1
d
(m + 1 + d)!
def. (m + 1 + d)!
=
+
m!(d + 1)!
d!(m + 1)!
(m + 1)(m + 1 + d)! + (d + 1)(m + 1 + d)!
=
(m + 1)!(d + 1)!
(m + 1 + d)!(m + 1 + 2)
=
(m + 1)!(d + 1)!
m+d+2
=
.
d+1
Questo risultato ausiliario ci aiuterà a comprendere meglio la struttura dei polinomi in
dimensione d.
Teorema 5. Valgono i seguenti due fatti
(i) i monomi ~x 7→ ~xα , ~x ∈ Rd , α ∈ Nd , sono linearmente indipendenti;
(ii) dim πm Rd = m+d
.
d
Dimostrazione. La dimostrazione sfrutta il principio di induzione sulla dimensione d ed è
divisa in due parti
(i) Caso base: per d = 1 l’enunciato è ovvio, infatti per ogni polinomio in una singola
variabile
N
X
p(x) =
cj xj ,
j=0
i coefficienti sono determinati da cj = p(j) (0)/j!, segue quindi che p(x) ≡ 0 se e solo
se cj = 0 per ogni j = 1, . . . , N .
4
Supponiamo ora che la tesi sia vera per la dimensione d − 1 e verifichiamo che questo
implica che la tesi è vera per la dimensione d. Sia J ⊆ Nd un insieme finito e
X
cα ~xα = 0.
α∈J
Definiamo Jk = {α ∈ J : α1 = k}. Allora esiste un n ∈ N tale che J = J0 ∪J1 ∪· · ·∪JN .
Questo significa che
X
0=
cα ~xα
α∈J
=
N X
X
cα x1 α1 · · · xd αd
k=0 α∈Jk
=
N
X
x1 k
X
cα x2 α2 · · · xd αd .
α∈Jk
k=0
Ora per il caso in singola variabile possiamo concludere che
X
cα x2 α2 · · · xd αd = 0, k = 0, . . . , N,
α∈Jk
ed ora per l’ipotesi induttiva abbiamo che cα = 0 per ogni α ∈ J.
(ii) Per il punto (i) basta dimostrare che
m+d
#{α ∈ N : |α| ≤ m} =
.
d
d
Caso base: se d = 1,
#{α ∈ N : α ≤ m} = m + 1 =
m+1
.
1
Supponiamo ora che la tesi sia vera per la dimensione d − 1 e verifichiamo che questo
implica che la tesi è vera per la dimensione d:
m n
d−1
n[
oo
X
#{α ∈ Nd : |α| ≤ m} = #
α ∈ Nd : αd = k,
αi ≤ m − k
i=1
k=0
=
m
X
n
o
# α ∈ Nd−1 : |α| ≤ m − k
k=0
ip. ind.
=
m X
m−k+d−1
k=0
0
X
d−1
h+d−1
=
d−1
h=m
lemma 4 m + 1 + d − 1
=
d−1+1
m+d
=
.
d
h=m−k
5
Nella definizione 1 abbiamo formulato le condizioni affinché uno spazio di funzioni
garantisca interpolanti uniche. Siamo ora in grado di interpretare queste condizioni come
condizioni per i punti.
Definizione 2. I punti X = {~x1 , . . . , ~xN } ⊆ Rd con N ≥ Q = dim πm (Rd ) sono chiamati
πm (Rd )-unisolventi se il polinomio identicamente nullo è l’unico polinomio di πm (Rd ) che
si annulla su ciascun punto dell’insieme.
Possiamo ora riformulare quanto visto nell’esempio 1 dicendo che tre punti in R2 sono
πm (Rd )-unisolventi se e solo se non sono allineati. Un generalizzazione di questo fatto vide
dal seguente
Teorema 6. Supponiamo che {L0 , . . . , Lm } sia un insieme formato da m + 1 rette distinte
in R2 e che X = {~x1 , . . . , ~xN } sia un insieme di Q = (m + 1)(m + 2)/2 punti distinti
tali che il primo sia su L0 , i secondi due siano su L1 ma non su L0 , e cosı̀ avanti, in
modo tale che gli ultimi m + 1 punti appartengano su Lm ma non alle precedenti rette
L0 , L1 , . . . , Lm−1 . Allora X è πm (R2 )-unisolvente.
Dimostrazione. Usiamo l’induzione su m. Caso base: per m = 0 il risultato è banale, in
questo caso infatti l’insieme dei siti X è formato da un unico punto, diciamo ~x1 . Ora
π0 (R2 ) è lo spazio formato dai polinomi costanti, e l’unica costante nulla su un certo punto
~x1 è la costante nulla, segue quindi che X = {~x1 } è π0 (R2 )-unisolvente.
Supponiamo ora vero l’enunciato per m − 1 e verifichiamo che la tesi valga anche per
m. A tal proposito consideriamo ora p ∈ πm (R2 ) tale per cui
p(~xi ) = 0
per i = 1, . . . , Q,
dobbiamo quindi mostrare che p è il polinomio identicamente nullo.
Per ogni i = 1, . . . , m scriviamo le rette Li come
αi x1 + βi x2 = γi ,
ricordando che ~x = (x1 , x2 )T . Se ora consideriamo la restrizione di p su una qualsiasi retta
Li , otteniamo un polinomio di grado m in una sola variabile. In particolare, se ristretto ad
Lm , p è un polinomio in una variabile di grado m che si annulla a m + 1 punti distinti. Ma
allora p si annulla identicamente su Lm e quindi possiamo fattorizzare tale polinomio come
p(~x) = (αm x1 + βm x2 − γm )q(~x),
con q polinomio di grado m − 1. Ora q soddisfa l’ipotesi induttiva, cioè q ≡ 0, e quindi
p ≡ 0.
Questo teorema può essere generalizzato a Rd usando iperpiani in Rd al posto di rette
in R2 e un’induzione sulla dimensione d a patto di richiedere l’ipotesi aggiuntiva che su ogni
iperpiano considerato i punti siano unisolventi. Invece di continuare in questa direzione,
approfondiamo il seguente caso particolare. Consideriamo l’insieme
d
Xm
= {β ∈ Nd : |β| ≤ m},
dove β = (β1 , . . . , βd ) e |β| := β1 + · · · + βd . Ora, per definizione, ~xβ = xβ1 1 xβ2 2 · · · xβd d e si
ha che deg(~xβ ) = β1 + β2 + · · · + βd = |β|. Visto poi che
{p ∈ πm (Rd ) : deg(p) ≤ m} = span{~xβ : deg(~xβ ) ≤ m}
= span{~xβ : |β| ≤ m},
6
possiamo concludere che
dim{p ∈ πm (Rd ) : deg(p) ≤ m} = #{~xβ : |β| ≤ m}
= #{β ∈ Nd : |β| ≤ m},
d ha esattamente Q = dim π (Rd ) punti.
cioè che Xm
m
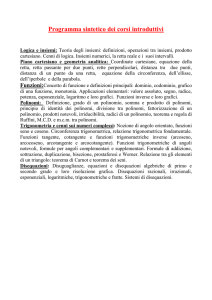
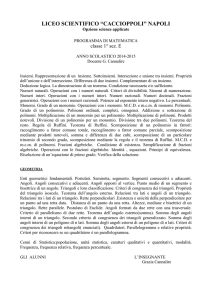
2 rappresenta una griglia equispaziata su un
Esempio 2. Nel caso d = 2, l’insieme Xm
triangolo. in particolare è composto dai punti a coordinate naturali delle rette di equazione
yi = −x + i, i = 0, . . . , m. In figura si trova una rappresentazione dei punti appartenenti
all’insieme X32 .
4
3
2
1
0
1
2
3
4
Come ci aspettavamo
10 =
dim (X32 )
2
= dim (π3 (R ))
teorema 5/(ii)
=
3+2
2
= 10.
2 è π (R2 )-unisolvente. Di conseguenza l’interpolazione polinoLemma 7. L’insieme Xm
m
miale di grado m su questo insieme di siti è unica.
Dimostrazione. Considerate le rette Li di equazione yi = −x + i, i = 0, . . . , m, l’enunciato
segue dal teorema 6.
Ovviamente anche in questo caso l’enunciato può essere generalizzato a dimensioni d
maggiori e può essere dimostrato via induzione sulla dimensione d, come in pagina 19 del
testo.
7