L'EQUILIBRIO E LE REAZIONI VINCOLARI
EQUILIBRIO DI UN SISTEMA DI FORZE
Il nostro problema è quello di far star fermi i corpi, cioè far si che una struttura
sia in equilibrio ora e negli anni a venire, dobbiamo pertanto studiare quali
sono le cosiddette condizioni di equilibrio di un sistema di forze.
F m a appare
| a 0 cioè F 0
Dalla equazione di Newton
che affinché un corpo non sia in
movimento occorre che
(il caso di moto rettilineo uniforme
non è trattabile in quanto non concretamente verificabile sul sistema terrestre).
Potremo allora sostenere che un sistema di forze è in equilibrio quando
R 0,
ma ciò non è sufficiente; infatti anche una coppia di forze, per esempio, ha
R 0
ma sappiamo che tale coppia tende a far ruotare il corpo a cui è
applicata, pertanto occorre per l'equilibrio che sia anche
M 0.
Possiamo allora affermare che: Condizione necessaria e sufficiente
affinché un sistema di forze sia in equilibrio è che sia
verificato che R 0 ed M 0 .
Graficamente questo vuol dire:
a) poligono delle forze chiuso
R 0
b) poligono funicolare chiuso
M 0
L'affermazione a appare evidente, vediamo di chiarire la b; se il primo e ultimo
lato del poligono funicolare risultano paralleli vuol dire che il sistema è
riconducibile ad una coppia e quindi M≠0 pertanto affinché sia M=0 il primo ed
ultimo lato devono coincidere (coppia di braccio nullo).
Se vogliamo imporre ad un sistema di forze l'equilibrio (vogliamo cioè trovare
quella forza che insieme a quelle date ci dia
F 0e M 0)
dobbiamo,
graficamente, procedere nel seguente modo:
a) sul poligono delle forze riporteremo la forza
(non è altro che
R cambiata di verso)
R
che chiude il poligono
b) individuare, con il poligono funicolare, l'incontro del primo ed ultimo lato
c) tracciare la parallela alla forza precedentemente determinata passante
per il punto di incontro ottenuto in b.
Tutto ciò infatti produce tra
R
e
R
una coppia di braccio nullo (
F 0e
M 0 ) quindi il sistema è in equilibrio.
EQUAZIONI CARDINALI DELLA STATICA
Analiticamente le equazioni dell'equilibrio
R 0 e M 0
possono essere
sviluppate.
Infatti possiamo immaginare di scomporre ogni singola forza del sistema in due
forze dirette secondo gli assi cartesiani (x,y), avremo quindi due sistemi di
forze parallele. Sappiamo che è possibile trovare l'intensità della risultante di
un sistema di forze parallele facendo la somma algebrica delle singole forze,
ma per l'equilibrio tale operazione deve essere nulla (in quanto poi
componendo le due risultanti, verticale ed orizzontale, la risultante complessiva
sia un vettore nullo).
In conclusione possiamo scrivere:
a)
RV 0
b)
RH 0
c)
=> o
FV 0 più semplicemente F V 0
=> o
FH 0 più semplicemente FH 0
M 0
la a, b, c sono chiamate equazioni cardinali della statica.
I VINCOLI
Sappiamo che un corpo su di un piano (ad esempio una penna sul tavolo) gode
di tre gradi di libertà cioè può compiere i seguenti movimenti:
a) traslare in senso verticale (lungo l'asse y)
b) traslare in senso orizzontale (lungo l'asse x)
c) ruotare intorno al baricentro (come un'elica)
Impedire questi movimenti significa vincolare il corpo e quindi impedirgli che
sotto determinate forze si muova, in altre parole ponendolo in equilibrio.
Vincolare consiste quindi nell'impedire lo spostamento del corpo in una o più
determinate direzioni.
L'elemento che vincola il corpo viene chiamato VINCOLO. Nella realtà il
vincolo spesso non è facilmente identificabile (ad esempio nelle murature e
negli edifici in c.a.), altre volte invece risulta individuabile (ad esempio le
cerniere di appoggio in strutture metalliche).
CLASSIFICAZIONE DEI VINCOLI
I vincoli si ipotizzano:
a) lisci (cioè privi di attrito)
b) bilaterali (cioè agiscono in ambedue i versi).
I vincoli si classificano secondo la quantità e il tipo di movimenti che
impediscono di eseguire alla struttura (e quindi dal tipo di reazione che
danno); pertanto abbiamo:
a) vincoli semplici che impediscono un solo movimento
b) vincoli doppi che impediscono due movimenti
c) vincoli tripli che impediscono tre movimenti.
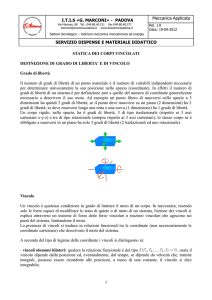
VINCOLI SEMPLICI
Il più comune si chiama carrello (o frequentemente appoggio semplice) e si
schematizza:
Questo vincolo impedisce alla struttura di muoversi perpendicolarmente al
piano di appoggio del carrello (in ambedue i versi); infatti la struttura (o
meglio l'asta) può ruotare intorno alla cerniera del carrello e traslare lungo in
suo piano d'appoggio.
La reazione del carrello sarà quindi perpendicolare al suo piano d'appoggio.
Dove possiamo trovare questo vincolo? Ad esempio nei solai (il vincolo non è
altro che la zona di trave dove poggia il solaio), nelle travi (in questo caso il
vincolo è prodotto dai pilastri) e nei ponti (tra trave e pila)
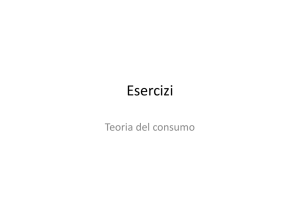
VINCOLI DOPPI
Il vincolo doppio più usato è la cerniera che si schematizza:
La cerniera impedisce la traslazione dell'asta in qualsiasi direzione.
Pertanto reagirà con una forza comunque diretta.
Dove troviamo questo vincolo? Ad esempio nel nodo tra fondazione e pilastri in
certe strutture metalliche.
VINCOLI TRIPLI
Il vincolo triplo per eccellenza è detto incastro e si schematizza:
L'incastro impedisce qualsiasi movimento sia traslatorio che rotatorio.
Pertanto le sue reazioni sono una forza comunque diretta e una coppia.
Troviamo questo vincolo, ad esempio, nel collegamento tra plinto e pilastro in
c.a.
LABILITA', ISOSTATICITA', IPERSTATICITA'
Abbiamo visto che un'asta ha tre gradi di libertà e pertanto per impedire
che questa si muova dobbiamo collocare degli opportuni vincoli. Se inseriamo
dei vincoli che permettono ancora all'asta di muoversi (es. una cerniera) la
struttura si definisce labile; se invece collochiamo dei vincoli strettamente
necessari a non far muovere (es. un incastro) l'asta la struttura si definisce
isostatica; infine se inseriamo dei vincoli più di quelli necessari a non far
muovere l'asta (es. un incastro e un carrello) la struttura si definisce
iperstatica.
Possiamo quindi affermare che:
a) una struttura è labile quando possiede un numero e dei tipi di vincolo
insufficienti per la sua stabilità
b) una struttura è isostatica quando possiede dei vincoli strettamente
sufficienti per la sua stabilità
c) una struttura è iperstatica quando possiede dei vincoli più che sufficienti
(sovrabbondanti) per la sua stabilità.
Vediamo ora analiticamente come sia possibile individuare a quale categoria
appartiene di volta in volta la struttura in esame.
In primo luogo i gradi di libertà 3333lll (le possibilità di muoversi senza
considerare i vincoli) di n aste è uguale a
3 n
(infatti ogni asta possiede 3
g.d.l.); inoltre un vincolo semplice possiede 1 grado di vincolo (impedisce cioè
un movimento), quello doppio 2 e quello triplo.
Concludendo se:
a) i gradi di libertà (L) risultano maggiori dei gradi di vincolo (V) la struttura è
labile; L>V con L-V=gradi di labilità
b) L=V la struttura è isostatica
c) L<V la struttura è iperstatica con L-V=gradi di iperstaticità.
Con V (gradi di vincolo) si intende la somma dei vari gradi di vincolo di ogni
vincolo presente nella struttura.
Le precedenti distinzioni sono necessarie in quanto:
a) se la struttura è labile non starà (a parte casi particolari) mai in equilibrio e
quindi non sono adatte al nostro scopo
b) se la struttura è isostatica o iperstatica può essere utilizzata ma si hanno
delle modalità di calcolo diverse.
Nel corso del terzo anno si studiano le strutture isostatiche.
REAZIONI VINCOLARI
Una struttura vincolata, a meno che non sia labile, è in equilibrio in quanto i
vincoli ne impediscono qualsiasi movimento allora è possibile applicare le
equazioni cardinali della statica:
a)
RV 0
=> o
F 0 più semplicemente F 0
b)
RH 0
=> o
F 0 più semplicemente F 0
c)
M 0
V
V
H
H
(*)
Le forze da considerare in tali equazioni non sono solo i carichi esterni, ma
anche le cosiddette reazioni vincolari, cioè quelle forze prodotte dai vincoli
per impedire movimenti relativi alle sue capacità di vincolo.
Le incognite delle (*) sono proprio le reazioni vincolari.
Abbiamo detto che la struttura è in equilibrio quando siano soddisfatte le (*) in
quanto si escludono i casi in cui:
a) la struttura si rompe (non può avvenire in quanto il corpo sarà
opportunamente dimensionato)
b) i vincoli si rompano (per lo stesso motivo di cui sopra).
Abbiamo quindi:
a) se la struttura è labile il corpo, in generale, non è in equilibrio e pertanto
le (*) non sono applicabili;
b) se la struttura è isostatica le (*) valgono e sono sufficienti a calcolare le
reazioni vincolari;
c) se la struttura è iperstatica le (*) valgono ma non sono sufficienti a
calcolare tutte le reazioni vincolari presenti (abbiamo più incognite delle
equazioni).
CALCOLO DELLE REAZIONI VINCOLARI
Nel metodo grafico dobbiamo imporre che il poligono delle forze sia chiuso e
in quello funicolare il primo ed ultimo lato coincidano.
Nella risoluzione analitica dobbiamo procedere come segue:
a) evidenziare le reazioni vincolari, riportando in figura le reazioni secondo il
tipo di vincolo e dandogli dei versi qualsiasi;
b) scrivere le equazioni cardinali della statica avendo preventivamente stabilito
le convenzioni positive, ricordandosi che l'equazione dei momenti è possibile
scriverla rispetto a qualsiasi punto;
c) scrivere le eventuali equazioni ausiliarie rispetto alle cerniere interne (nel
caso in cui le aste sono più di una);
d) risolvere il sistema, se qualche risultato è negativo occorre cambiare verso
alle reazioni corrispondenti;
e) riportare i risultati in figura.