I.T.I.S «G. MARCONI» - PADOVA
Via Manzoni, 80 Tel.: 049.80.40.211 Fax 049.80.40.277
[email protected] www.itismarconipadova.it
Meccanica Applicata
Rel. 1.0
Data: 19-09-2012
Settore tecnologico – Indirizzo meccanica meccatronica ed energia
SERVIZIO DISPENSE E MATERIALE DIDATTICO
STATICA DEI CORPI VINCOLATI
DEFINIZIONE DI GRADO DI LIBERTA' E DI VINCOLO
Grado di libertà
Il numero di gradi di libertà di un punto materiale è il numero di variabili indipendenti necessarie
per determinare univocamente la sua posizione nello spazio (coordinate). In effetti il numero di
gradi di libertà di un sistema è per definizione pari a quello del numero di coordinate generalizzate
necessario a descrivere il suo moto. Ad esempio un punto libero di muoversi nello spazio a 3
dimensioni ha quindi 3 gradi di libertà; se il punto deve muoversi su un piano (2 dimensioni) ha 2
gradi di libertà; se deve muoversi lungo una retta o una curva (1 dimensione) ha 1 grado di libertà.
Un corpo rigido, nello spazio, ha 6 gradi di libertà, 3 di tipo traslazionale (rispetto ai 3 assi
cartesiani x-y-z) e tre di tipo rotazionale (sempre rispetto ai 3 assi cartesiani), lo stesso corpo se è
obbligato a muoversi in un piano ha solo 3 gradi di libertà (2 traslazionali ed uno rotazionale).
Vincolo
Un vincolo è qualsiasi condizione in grado di limitare il moto di un corpo. In meccanica, essendo
solo le forze capaci di modificare lo stato di quiete o di moto di un sistema, l'azione dei vincoli si
esplica attraverso un insieme di forze dette forze vincolari o reazioni vincolari che agiscono sui
punti del sistema, limitandone il moto.
La presenza di vincoli si traduce in relazioni funzionali tra le coordinate (non necessariamente le
coordinate cartesiane) che descrivono il moto del sistema.
A seconda del tipo di legame delle coordinate i vincoli si distinguono in:
- vincoli olonomi bilateri: qualora la relazione funzionale è del tipo
, ossia il
vincolo dipende dalla posizione ed, eventualmente, dal tempo, se dipende da velocità che, tramite
integrali, possono essere ricondotte alle posizioni, a meno di una costante, il vincolo si dice
integrabile;
1
- vincoli olonomi unilateri o unilaterali: qualora la relazione funzionale è del tipo
oppure vale la disuguaglianza opposta. Tale disequazione definisce un
dominio che ha come frontiera la rispettiva equazione per vincoli bilateri; nel caso di una superficie
chiusa il dominio può essere esterno o interno a seconda del segno della disuguaglianza.
Combinando equazioni e disequazioni si ottengono ancora vincoli unilaterali olonomi (ovvero che
limitano lo spazio delle configurazioni accessibile) costituiti da una superficie con bordo o da un
arco di curva.
- vincoli anolonomi: tutti quelli che non soddisfano una relazione funzionale del tipo sopra.
A seconda della dipendenza dal tempo i vincoli si distinguono in:
- vincoli scleronomi o fissi se non dipendono dal tempo;
- vincoli reonomi o mobili se dipendono dal tempo.
A seconda della reazione vincolare che producono:
- vincoli lisci se la reazione vincolare è sempre diretta lungo la direzione della componente
cinematica vincolata;
- vincoli scabri se la reazione vincolare ha anche componenti lungo direzioni delle componenti
cinematiche non vincolate.
Normalmente nelle applicazioni che seguiranno noi daremo per scontato di trattare vincoli olonomi,
bilaterali, lisci, scleronomi.
I vincoli si dicono esterni se limitano gli spostamenti assoluti, interni se limitano gli spostamenti
relativi tra le parti di un sistema.
Si dice grado di vincolo il numero di componenti di spostamento vincolate: in questo senso si parla
di vincolo semplice se limita una sola componente di spostamento, di vincolo doppio, triplo, ecc.,
quando le componenti impedite sono più d'una.
Si parla di cedimento vincolare quando il vincolo impone, alla componente di spostamento
vincolata, di assumere un determinato valore non nullo.
In Meccanica, i vincoli sono equivalenti a delle forze, in quanto modificano il moto di un sistema
ogniqualvolta questo cerchi di violarli.
Si dice reazione vincolare la forza esplicata da un vincolo. Affinché si possa esercitare la
condizione di vincolo cinematico, le reazioni vincolari hanno una ben precisa caratterizzazione in
funzione della componente di spostamento che deve essere vincolata: ciò determina alcuni caratteri
vettoriali (direzione e punto di applicazione) delle reazioni vincolari, e quindi il numero di
parametri scalari indipendenti (il grado di vincolo) attraverso cui si esprime la reazione vincolare.
Per problemi piani, i vincoli più comunemente utilizzati in statica delle strutture sono di seguito
descritti.
Più complessi invece risultano i vincoli estesi allo spazio.
2
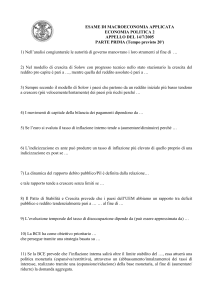
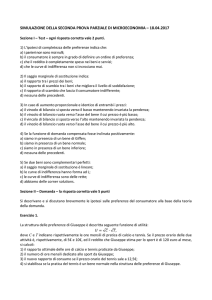
- il carrello o appoggio semplice è un vincolo semplice ed impedisce lo spostamento del punto
vincolato lungo l'asse ortogonale al piano di scorrimento del carrello. Lascia al corpo due libertà di
movimento: la traslazione lungo il piano di scorrimento del carrello e la rotazione attorno al punto
vincolato. La reazione vincolare corrisponde ad una forza applicata nel punto vincolato e diretta
lungo la direzione ortogonale al piano di scorrimento.
- la cerniera, è un vincolo doppio che impedisce lo spostamento del punto vincolato lungo una
qualsiasi direzione del piano del problema. Lascia il corpo libero di ruotare intorno al punto stesso.
Reagisce con una forza applicata al punto e diretta secondo una qualsiasi direzione appartenente al
piano del problema: tale forza può essere rappresentata dalle sue due componenti su due assi
ortogonali.
- l’incastro è un vincolo triplo che impedisce al corpo sia le due componenti di traslazione che la
rotazione. Reagisce attraverso due componenti di forza su due diverse direzioni e una coppia.
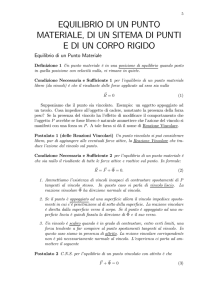
- il pendolo o biella è un vincolo semplice equivalente del carrello: impedisce gli spostamenti del
punto vincolato lungo l'asse della biella e permette al corpo gli spostamenti ortogonali a tale asse e
la rotazione attorno al punto. Reagisce con una forza applicata al punto e diretta lungo l'asse della
biella.
- il doppio pendolo o bipendolo è un vincolo doppio che impedisce la traslazione lungo l'asse dei
pendoli e la rotazione del corpo. Permette al corpo di traslare lungo la direzione ortogonale all'asse
dei pendoli: in tal senso il vincolo viene detto anche pattino. Reagisce con una forza diretta secondo
l'asse del pendolo ed una coppia.
3
- il doppio doppio pendolo o quadripendolo o pendolo improprio o pantografo è un vincolo
semplice che impedisce le rotazioni del corpo. Lascia libero il corpo di traslare. Reagisce tramite
una coppia.
I sistemi meccanici si caratterizzano staticamente e cinematicamente sulla base delle soluzioni
possibili dei sistemi di equazioni che rappresentano rispettivamente le condizioni di equilibrio del
sistema e l'azione cinematica dei vincoli
- sistema isostatico: il grado di vincolo m eguaglia il grado di libertà n ed i vincoli sono ben posti,
cioè tra loro indipendenti. Il problema statico (così come il problema cinematico) ammette
soluzione e la soluzione è unica: si dice allora che il sistema è staticamente determinato (a qualsiasi
valore dei carichi esterni sono associate reazioni vincolari che rendono il sistema equilibrato) e
cinematicamente determinato (i vincoli sono strettamente sufficienti ad impedire atti di moto rigido
delle sue parti, o a determinarli univocamente nel caso di cedimenti assegnati).
- sistema labile o ipostatico: il grado di vincolo m è inferiore al grado di libertà n del sistema e i
vincoli presenti sono ben posti. In termini cinematici, il relativo problema ammette ∞n-m soluzioni: i
vincoli applicati sono insufficienti ad impedire atti di moto rigido del sistema, capaci di articolarsi
secondo l = n - m meccanismi di labilità (il sistema è cinematicamente indeterminato ed l = n-m è il
grado di labilità). In termini statici, il relativo problema non ammette in generale soluzione.
- sistema iperstatico: il grado di vincolo m è superiore al grado di libertà n. In termini statici, il
relativo problema ammette ∞m-n soluzioni: il sistema è sempre in equilibrio ma le condizioni di
equilibrio sono in numero insufficiente a determinare univocamente i valori delle reazioni vincolari
(il sistema è staticamente indeterminato ed i = m - n è il suo grado di iperstaticità). In termini
cinematici, il relativo problema non ammette in generale soluzione per generici valori dei
cedimenti: i vincoli sono sovrabbondanti e gli atti di moto del sistema sono sempre impediti.
4
- sistema degenere: i vincoli presenti sono mal posti (mancano di efficacia) ed insufficienti ad
impedire atti di moto del sistema (il sistema ha n - p meccanismi di labilità). L'equilibrio sussiste
solo per particolari valori dei carichi, ma il numero p di equazioni indipendenti di equilibrio non è
sufficiente a determinare univocamente il valori delle reazioni vincolari (il sistema ha m - p
iperstaticità). In pratica un sistema degenere presenta contemporaneamente meccanismi di labilità e
condizioni di iperstaticità.
Per una generica struttura è sempre verificata la relazione tra grado di libertà, di vincolo, di labilità
e di iperstaticità
n–m=l-i
Da ciò si traggono le seguenti condizioni sufficienti per la labilità e l'iperstaticità di una struttura:
n > m → la struttura è sicuramente labile;
n < m → la struttura è sicuramente iperstatica.
Le due condizioni non sono tuttavia necessarie per la labilità e per l'iperstaticità: un sistema
degenere presenta sia iperstaticità sia labilità, pur avendo n = m.
D'altra parte l'uguaglianza tra grado di libertà e grado di vincolo risulta una condizione necessaria
ma non sufficiente per la isostaticità:
n = m ← la struttura è forse isostatica, è necessario verificare l'efficacia dei vincoli.
I vincoli infatti possono essere mal posti e la struttura risulterà in effetti degenere. In conclusione
una struttura è isostatica se c'è uguaglianza tra grado di vincolo e grado di libertà e se si dimostra
che i vincoli sono efficaci, cioè se si dimostra che sono assenti meccanismi di labilità della struttura.
Le strutture isostatiche rivestono un ruolo prevalente in statica delle strutture, in quanto esse
sono univocamente risolvibili (in termini di reazioni vincolari e di sforzi di sollecitazione
interna) mediante il solo utilizzo delle condizioni di equilibrio statico.
Per le strutture iperstatiche, le sole equazioni della statica non sono sufficienti per una loro
risoluzione: in tal caso occorre fare riferimento al metodo delle forze o al metodo delle rigidezze.
Le strutture labili sono, in generale, staticamente irrisolvibili.
5
CALCOLO DELLE REAZIONI VINCOLARI
Ci proponiamo ora di calcolare il valore delle reazioni vincolari nel caso di strutture isostatiche. In
definitiva, dal punto di vista matematico tale problema si riduce alla soluzione di un sistema lineare
di equazioni (le equazioni dell'equilibrio nel nostro caso).
Una ulteriore semplificazione è l'assunzione di studiare problemi piani, quindi le equazioni di
equilibrio del sistema di riducono a loro volta a tre. In particolare se assumiamo che la giacitura
della struttura sia il piano XY (asse Z positivo uscente)
∑ Fxi = 0 ∑ Fyi = 0 ∑ Mzi = 0
Diamo di seguito una guida in passi per affrontare il problema del calcolo dando per assodato di
aver verificato l'isostaticità della struttura.
1. Definire un sistema di riferimento levogiro
2. Ipotizzare direzione e verso delle reazioni vincolari. Ricordiamo qui che la direzione è definita
dalla tipologia di vincolo mentre il verso è assunto arbitrariamente.
3. Sostituire gli eventuali carichi distribuiti con carichi concentrati equivalenti e scomporre le
eventuali forze esterne concentrate che non siano orientate secondo gli assi di riferimento scelti.
4. Scrivere le equazioni di equilibrio e risolverle completamente determinando i valori dei moduli
delle reazioni vincolari. Relativamente alla scrittura dell'equazione dei momenti si stia attenti a
scegliere un polo di calcolo che semplifichi l'equazione stessa, normalmente le scelte preferite sono
i punti di vincolo ove si annullano i momenti di una o più reazioni incognite.
5. Se abbiamo ottenuto valori di reazione negativi invertire il verso delle relative reazioni
Approfondimenti
Il corpo perfettamente rigido
In tutta la dispensa si è fatta l'assunzione che i corpi trave siano infinitamente rigidi, in altre parole
qualsiasi sia il sistema di forze e momenti su di essi applicato essi non subiscono nessuna
deformazione (cambiamento di forma). Una tale assunzione è evidentemente un modello astratto
dei corpi reali che non possono mai essere perfettamente rigidi.
6
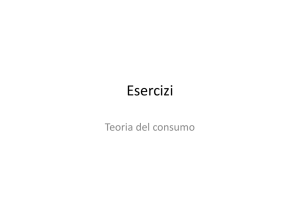
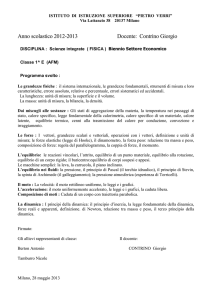
Labilità non evidenti
Analizziamo queste due strutture:
Se applichiamo le regole viste sopra apparentemente le due strutture risultano isostatiche, per
entrambe infatti abbiamo:
2 corpi, quindi 2 · 3 = 6 gdl
3 cerniere (due esterne e una interna) 2 · 3 = 6 vincoli elementari
n° gdl = numero di vincoli elementari
sono quindi entrambe isostatiche?
In realtà quella sopra lo è mentre quella sotto no, ad una prima analisi sembrerebbe però che anche
in quella sotto i vincoli impediscano efficacemente i movimenti in collaborazione con la perfetta
rigidità delle due travi.
In realtà questo non accade perché l'efficacia dei vincoli non può essere associata alle caratteristiche
delle travi o corpi cui sono collegati, in altre parole una struttura manifesta delle labilità quando,
anche se non sono possibili movimenti reali finiti delle travi i vincoli non garantiscono, da soli, la
possibilità di atti di moto della struttura.
Un argomento comunque da approfondire con il tuo insegnante!
Questa dispensa è distribuita secondo le licenze creative commons come indicato dall'etichetta qui sotto. Parti di questa dispensa sono state tratte da
internet avendo cura di utilizzare materiali liberi da copyright, se per errore fosse stato invece utilizzato materiale sotto licenza, si prega di contattare
immediatamente l'Istituto G. Marconi, allegando la documentazione di licenza così che i curatori abbiano modo di eliminare quanto non conforme alla
legge.
7