3
Prefazione
Questo volume è dedicato all’integrazione indefinita, essendo il problema dell’integrazione definita completamente risolto dal teorema fondamentale. L’argomento, spesso, presenta notevoli difficoltà poiché il metodo di integrazione più opportuno cambia di volta in volta.
Nel primo capitolo è presentata un’ampia casistica di integrali indefiniti raggruppati per metodo di
integrazione. Lo studente dovrebbe seguire l’ordine proposto per acquisire man mano le competenze necessarie per comprendere gli esercizi così come sono presentati.
Nel secondo capitolo sono trattati alcuni aspetti teorici dell’integrazione definita e si esaminano
l’integrazione estesa agli intervalli impropri e l’integrazione delle funzioni non limitate.
L’ultimo capitolo introduce alcune applicazioni dell’integrazione a problemi di geometria e di fisica.
Per la gamma di esercizi presentati e per la chiarezza con cui i passaggi sono spiegati, il testo
costituisce un indispensabile strumento di consultazione in vista della prova scritta d’esame.
Prefazione
LUIGI PIANESE
Indice dei simboli
>
<
≥
≤
≠
≅
±
∞
→
∀
∈
∉
∪
∩
⊂
⊆
⊄
⇒
⇔
R
ln( )
e
lim
f'(x)
∫
∑
maggiore
minore
maggiore o uguale
minore o uguale
diverso da
circa uguale a
più o meno
infinito
tende a
per ogni
appartiene
non appartiene
unione tra insiemi
intersezione tra insiemi
sottoinsieme proprio
sottoinsieme
non è sottoinsieme
implicazione
doppia implicazione
insieme dei numeri reali
logaritmo neperiano
numero di Nepero
limite
derivata
integrale
sommatoria
■1
1.1
5
Integrali indefiniti
Integrale indefinito
Nell’insieme delle funzioni dotate di derivata in un intervallo, la derivazione è una operazione che
associa ad una funzione (primitiva) un’altra funzione, la sua derivata. Si definisce così una applicazione dell’insieme delle funzioni primitive sull’insieme delle funzioni derivate. Tale applicazione
non è biunivoca in quanto due funzioni primitive, che differiscono per una costante, hanno la
stessa derivata, per cui l’operazione di derivazione non è invertibile, e quindi non è corretto affermare, come comunemente viene fatto, che l’integrazione è l’operazione inversa della derivazione.
Per definire correttamente l’operazione di integrazione conviene ripartire l’insieme delle funzioni
primitive in classi di equivalenza rispetto alla derivazione. Due funzioni primitive sono equivalenti
se hanno la stessa derivata. Ogni classe di equivalenza è formata dalle funzioni che hanno la
stessa derivata. Si definisce così una seconda applicazione, quella che ad ogni classe di equivalenza associa la sua derivata; tale applicazione è biunivoca, quindi invertibile. L’applicazione inversa è la corrispondenza che ad ogni funzione, dotata di primitiva, associa la classe di tutte le
sue primitive. L’immagine di una funzione f tramite questa corrispondenza si chiama integrale
indefinito e viene indicato col simbolo:
∫ f ( x )dx
Tale simbolo indica, quindi, una intera classe di funzioni. Se F(x) è una qualsiasi primitiva di f,
l’integrale indefinito può essere anche indicato con F(x) + c, essendo c una costante indeterminata. Si può porre cioè:
∫ f ( x )dx = F ( x ) + c
Esiste una sola primitiva che assume in un punto un valore assegnato. Se infatti F(x) è una
qualsiasi primitiva di una funzione f, ed x0 un punto dell’intervallo di definizione [a,b], la primitiva
che in x0 assume il valore y0 è:
F (x ) – F (x 0 ) + y 0
La primitiva nulla in y0 è quindi:
F (x ) – F (x 0 )
Se, inoltre, x1 e x2 sono due punti di [a,b] mentre F e G sono due qualsivoglia primitive si ha:
F ( x 2 ) – F ( x 1) = G ( x 2 ) – G ( x 1)
Integrale indefinito e misura dei rettangoloidi
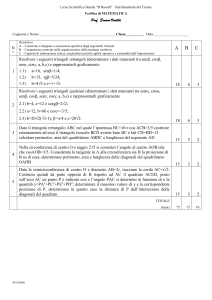
Sia f una funzione non negativa, continua, definita in [a,b], in modo che il diagramma cartesiano
sia situato nel semipiano delle ordinate non negative. Si chiama rettangoloide di base [a,b]
relativo alla funzione f l’insieme dei punti (x,y) tali che (Fig. 1):
a≤x≤b
0 ≤ y ≤ f(x)
Vediamo, in maniera preliminare, come l’integrale indefinito sia relazionato all’area del rettangoloide di base [a,b] di f. Precisamente, vogliamo mostrare che tale area concide con G(b) – G(a),
1. Integrali indefiniti
1.2
6
essendo G(x) una qualsiasi primitiva di f. Tale argomento sarà successivamente trattato con maggior rigore, quando affronteremo il problema dell’integrazione definita.
m(x)
FIG. 1
a
x + ∆x
x
b
A tal fine sia x un punto interno ad [a,b], si consideri la funzione F(x) che associa a x il numero
reale area del rettangoloide di base [a,x]. Tale funzione è non negativa e strettamente crescente
in [a,b]. Sia ∆x un incremento della varabile x di modo che x + ∆x sia interno ad [a,b]. Supponendo, per semplicità, che sia ∆x > 0, la differenza F ( x + ∆x ) – F ( x ) rappresenta l’area del rettangoloide che ha per base l’intervallo di estremi x e x + ∆x. Indicando con m(x) e M(x) rispettivamente
il minimo e massimo di f in tale intervallo, risulta:
m ( x ) ⋅ ∆x ≤ F ( x + ∆x ) – F ( x ) ≤ M ( x ) ⋅ ∆x
ovvero (Fig. 1), l’area del rettangoloide è compresa tra l’area del rettangolo di base ∆x e altezza
m(x) e quella del rettangolo che ha la stessa base e altezza M(x). Dividendo la relazione precedente per ∆x:
m (x ) ≤
F ( x + ∆x ) – F ( x )
≤ M (x )
∆x
Poiché al tendere di ∆x a zero il massimo e il minimo di F tendono contemporaneamente a F(x) si
ha:
lim m ( x ) = lim M ( x ) = f ( x )
∆x → 0
∆x → 0
Integrali di funzioni di una variabile reale
e quindi anche:
F ′ ( x ) = lim
∆x → 0
F ( x + ∆x ) – F ( x )
= f (x )
∆x
La precedente relazione mostra che la funzione F, che, come detto, rappresenta l’area del rettangoloide di base [a,x ], è una primitiva di f, precisamente quella che si annulla in a. Risulta chiaro,
quindi, che l’area del rettangoloide di base [a,b] è F(b).
Se G è una qualsiasi altra primitiva, essendo G(x) = F(x) + c, si ha infine:
F(b) = G(b) – G(a)
1.3
Integrali immediati
Per quanto detto nel paragrafo precedente, l’integrale indefinito di una funzione continua in un
intervallo I viene indicato col simbolo:
∫ f (x )dx
(1.3.1)
Si ricorda che tale simbolo non indica una sola funzione, ma l’insieme di tutte le primitive della
funzione nell’intervallo I. Il problema consiste nel determinare una delle primitive della funzione
assegnata, poiché tutte le altre si ottengono sommando alla particolare primitiva una opportuna
costante reale. La funzione f viene detta funzione integranda.
Mentre la funzione derivata di una qualsiasi funzione continua si trova facilmente conoscendo
poche regole, ricavare una funzione primitiva di una funzione continua, generalmente, non è
altrettanto agevole, anzi non è detto che in generale ciò sia possibile. Non è infatti sempre possibile esprimere mediante funzioni elementari la primitiva di una qualsivoglia funzione continua di
cui si conosca l’espressione analitica. Tuttavia, è utile apprendere i metodi di integrazione delle
funzioni continue, sia perché tali metodi facilitano il calcolo dell’integrazione, sia perché a volte il
calcolo degli integrali definiti viene svolto in via approssimata sostituendo alla funzione integranda una funzione approssimante per la quale è più facile trovare la primitiva.
7
FUNZIONI IPERBOLICHE
Le funzioni iperboliche sono così definite:
senh x =
e x – e –x
e x + e –x
e x – e –x
; cosh x =
; tanh x = x
2
2
e + e –x
La funzione senh è strettamente crescente e quindi invertibile. La funzione inversa è chiamata
settsenh (settore-seno iperbolico), ovvero senh–1 o anche arcsenh. Essa può ricavarsi esplicitando rispetto a y l’equazione: x =
2x = e y –
ey – e–y
; ricavando ey dalla precedente espressione si ha:
2
1 e 2y – 1
=
→ 2xe y = e 2 y – 1→ e 2 y – 2xe y – 1= 0
ey
ey
ponendo ey = z si ottiene l’equazione di secondo grado:
z 2 – 2xz – 1= 0 → z1,2 = x ± x 2 + 1
scartando la radice negativa (z è non negativo):
(
)
e y = x + x 2 + 1 → y = senh–1 x = ln x + x 2 + 1
L’insieme di definizione della precedente funzione è tutto l’insieme dei numeri reali R.
Allo stesso modo si ricava l’inversa della funzione cosh. Essendo questa strettamente decrescente per valori negativi della variabile, strettamente crescente per valori positivi, non è
invertibile. È però invertibile la sua restrizione ai valori positivi della variabile. Ripetendo il
procedimento precedente si ricava:
(
)
La funzione cosh–1 o arcosh è definita per x ≥ 1.
La funzione tanh è strettamente crescente in tutto R, quindi invertibile. Sempre con procedimento analogo a quello usato per ricavare l’inversa del senh, si ottiene:
1 1+ x
tanh–1 x = ln
2 1− x
La funzione è definita per –1 < x < 1.
1. Integrali indefiniti
cosh–1 x = ln x + x 2 – 1
8
Poiché le funzioni continue sono composte, quasi sempre, attraverso le funzioni elementari,
è utile riportare, nella seguente tabella, le funzioni primitive di tali funzioni elementari:
Primitive di funzioni elementari
∫x
α
dx =
x α +1
+c
α +1
∫ e dx = e
x
x
dx
∫x
= ln x + c
ax
∫ a dx = lna
+c
x
∫ sen xdx = – cos x + c
∫ cos xdx = sen x + c
∫ senh xdx = cosh x + c
∫ cosh xdx = senh x + c
dx
dx
∫ sen x = – cotan x + c
∫ cos
2
dx
∫
1– x 2
∫
1+ x 2
dx
dx
∫ 1– x
2
2
dx
= arcsen x + c = – arccos x + c ′
∫ 1+ x
= arcsenhx + c = ln x + x 2 + 1 + c
∫
1 1+ x
= ln
+c
2 1– x
x
2
= tan x + c
= arctan x + c = –arccotanx + c ′
dx
x 2 –1
= ln x + x 2 – 1 + c
dx
∫ cosh x = tanh x + c
2
A questo punto occorre fare alcune osservazioni su due integrali.
Integrali di funzioni di una variabile reale
Poiché D arccosh x =
1
2
, molto spesso si trova
x –1
∫
dx
x 2 –1
= arccosh x + c . In realtà è preferibile
adottare per tale integrale la formula in tabella; la precedente relazione, infatti, vale solo nel dominio di definizione della funzione arccosh x, cioè per x ≥ 1, mentre la funzione integranda è definita
anche per x ≤ –1. Tuttavia, nello sviluppo di alcuni integrali, quando si verifica che la funzione
integranda non è definita per valori della variabile minori di 1, si potrà usare la precedente formula.
Analogo ragionamento si ripete per la funzione arctanh x. Infatti la funzione integranda, che compare nell’integrale
dx
∫ 1– x
2
, è la derivata della funzione arctanh x. Ma, mentre questa è definita
solo per –1 < x < 1, la funzione
1
è definita in tutto R esclusi i punti x = –1 e x = 1.
1– x 2
Gli integrali immediati sono quelli che si ricavano riconoscendo una primitiva della funzione
integranda tra quelle delle funzioni elementari senza alcuna operazione ulteriore. Una buona
parte di tali integrali possono essere facilmente riconosciuti sfruttando la relazione f' (x)dx = df(x).
Sostituendo nella precedente tabella f(x) a x.
9
Integrali immediati
α
∫
f ( x ) ⋅df ( x ) = f ( x ) ⋅f ' ( x )dx =
∫
e f ( x )f ' ( x )dx = e f ( x ) + c
∫
α
df ( x )
f (x )
+c
α +1
α +1
∫
∫ senf ( x ) ⋅f ' ( x )dx = – cosf ( x ) + c
f ' ( x )dx
∫
1– f 2 ( x )
f ' ( x )dx
1+ f
2
(x )
a f (x )
lna
f ' ( x )dx
∫ cos f ( x ) = tanf ( x ) + c
2
f ' ( x )dx
a f ( x )f ' ( x )dx =
= ln f ( x ) + c
∫ cosf ( x ) ⋅f ' ( x )dx = senf ( x )
∫ sen f ( x ) = – cotanf ( x ) + c
∫
f ' ( x )dx
∫ f (x ) = ∫ f (x )
2
= arcsenf ( x ) + c = – arccos f ( x ) + c '
∫ 1+ f ( x ) = arctanf ( x ) + c = –arccotanf ( x ) + c '
= senh–1 f ( x ) + c
∫
dx
2
f ' ( x )dx
f
2
(x ) – 1
= ln f ( x ) + f 2 ( x ) – 1 + c
= ln f ( x ) + f 2 ( x ) + 1 + c
f ' ( x )dx
1
1+ f ( x )
f ' ( x )dx
∫ cosh f ( x ) = tanhf ( x ) + c
∫ 1– f ( x ) = 2 ln 1− f ( x ) + c
2
2
Molte volte alcune semplici operazioni sulla funzione integranda quali la moltiplicazione o la divisione per un numero, la messa in evidenza di un fattore ecc., permettono, senza modificare la
funzione integranda, di ricondurre il calcolo dell’integrale indefinito a un integrale immediato.
Gli esercizi chiariranno meglio le idee.
Esercizio n. 1.3.1
dx
∫ 2 + 3( x + 1)
È facile riconoscere che l’integrale indefinito è riconducibile all’integrale immediato:
dx
∫ 1+ x
2
= arctan x + c
Infatti, mettendo in evidenza il fattore 2 a denominatore:
dx
∫ 2 + 3( x + 1)
2
=
1
2
∫
1
dx
dx
=
2
3
2
2
3
1+ ( x + 1)
1+
( x + 1)
2
2
∫
1. Integrali indefiniti
✔
2
10
✔
Una costante aggiunta ad argomento del differenziale non altera il differenziale stesso, in quanto la
(
)
(
)
costante si annulla nell’operazione di derivazione: d f ( x ) + c = D f ( x ) + c dx = f ' ( x )dx . Poiché
1
sussiste, inoltre, l’uguaglianza df ( x ) = da ⋅f ( x ) si può esprimere il differenziale dx come segue:
a
dx =
2 3
2 3
d
x =
d
( x + 1)
3 2
3 2
Quindi:
1
2
∫
2 3
d
( x + 1) 1 2 d
1
3
2
= ⋅
=
2
2
2 3
2
3
3
x + 1)
x + 1)
1+
1+
1+
(
(
2
2
dx
∫
Effettuando la sostituzione t =
∫
3
( x + 1)
2
3
x + 1)
(
2
2
3
( x + 1) si ha:
2
1 2 dt
1 2
⋅
= ⋅
arctant + c
2 3 1+ t 2 2 3
∫
da cui:
dx
✌ ∫
2 + 3 ( x + 1)
2
=
3
1 2
arctan
x + 1 + c
2 3
2
Esercizio n. 1.3.2
dx
∫ αx + β
Integrali di funzioni di una variabile reale
✔
L’integrazione è immediata riconoscendo che si può facilmente portare (αx + β) ad argomento
del differenziale:
dx
1
dα x
1 d (α x + β )
αx + β
∫ αx + β = α ∫ αx + β = α ∫
da cui:
dx
1
✌ ∫ α x + β = α ln α x + β + c
Esercizio n. 1.3.3
∫ sen x cos x dx
✔
Basta ricordare che dsenx = cosx dx per cui:
1
∫ sen x cos x dx = ∫ sen x d (sen x ) = 2 sen x + c
2
✔
Tenendo presente che d cosx = –senx dx, lo stesso integrale poteva mettersi nella forma:
1
∫ sen x cos x dx = – ∫ cos x d (cos x ) = – 2 cos
2
11
x +c '
I due risultati coincidono. Infatti:
✌
(
)
1
1
1
1 1
– cos2 x + c ' = – 1– sen2 x + c ' = sen2 x + c '– = sen2 x + c
2
2
2
2 2
Esercizio n. 1.3.4
∫ sen x cos
α
✌ ∫ sen x cos
α
∫
x dx = – cosα x d cos x = –
xdx
cosα +1 ( x )
+c
α +1
Esercizio n. 1.3.5
∫ x sen x dx
2
✌ ∫ x sen x dx = 21 ∫ sen x dx
2
2
2
1
= – cos x 2 + c
2
Esercizio n. 1.3.6
∫x
✌ ∫x
α –1
cos x α dx =
α –1
cos x α dx
1
1
cos x α dx α = sen x α + c
α
α
∫
Esercizio n. 1.3.7
∫
x
1
dx =
2
1– x 2
∫
x
1– x 2
1– x 2
)
dx
2
1 d 1− x
1
=–
=–
2
2
1– x 2
1– x 2
dx 2
da cui:
✌ ∫
(
x
dx = – 1− x 2 + c
∫
1
2 –2
∫ (1– x )
(
d 1– x
2
)
(
)
1
– +1
2
1 1– x 2
+c
=–
1
2
– +1
2
1. Integrali indefiniti
∫
12
Esercizio n. 1.3.8
∫
dx
1
=
3
5x + 3 5
✌ ∫
∫ ( 5x + 3 )
−
1
3
3
dx
5x + 3
1 ( 5x + 3 )
d ( 5x + 3 ) =
2
5
3
1
− +1
3
=
3 3
( 5x + 3 ) 2 + c
10
Esercizio n. 1.3.9
∫
✔
lnx dx
x
Non è necessario il valore assoluto ad argomento del logaritmo in quanto la funzione integranda è definita solo per valori positivi della x.
✌ ∫
lnxdx
1
= lnx d ln x = ln2 x + c
x
2
∫
Esercizio n. 1.3.10
∫
✌ ∫
ln x dx
x
lnxdx
x
1
2 3
2
ln3 x + c
= ln 2 x d ln x = ln 2 x + c =
3
3
∫
Esercizio n. 1.3.11
Integrali di funzioni di una variabile reale
∫ senα x dx
1
1
✌ ∫ senα x dx = α ∫ senα d α x = – α cosα x + c
Esercizio n. 1.3.12
A)
senα x
∫ tanα x dx
1 senα x
B)
1
1 d cos α x
= – ln( cos α x ) + c
α
cos α x
✌
A)
∫ cosα x dx = α ∫ cosα x dα x = – α ∫
✌
B)
∫ coshα x dx = α ∫ coshα x dα x = α ∫
✔
senhα x
1 senhα x
∫ tanhα x dx
1 d coshα x 1
= ln( coshα x ) + c
coshα x α
Ricordiamo che, mentre D cosx = –senx, è D coshx = –senhx.
13
Esercizio n. 1.3.13
∫
✌ ∫
sen x
dx
cos x
1
3
sen x
2
d cos x
dx = –
= cos 2 xd cos x = cos 2 x + c
3
cos x
cos x
∫
∫
Esercizio n. 1.3.14
∫
3
✌ ∫ sen
cos
5
sen3 x
dx
cos5
x
sen3 x dx
1
= tan3 x d tan x = tan4 x + c
dx =
x
cos3 x cos2 x
4
∫
∫
Esercizio n. 1.3.15
∫
4
cos
✌ ∫ sen
6
cos4 x
dx
sen6 x
x
cos4 x dx
1
= – cotan4 x d co
otanx = – cotan5 x + c
dx =
x
sen4 x sen2 x
5
∫
∫
Esercizio n. 1.3.16
1
∫ sen x cos x dx
∫
sen2 + cos2 x dx
sen x
1
cos x
=
dx =
dx +
dx =
2
sen x cos x
sen x cos x sen x
cos x
sen x
sen x
d cos x
d sen x
= –ln cos x + ln sen x + c = ln
+c
=–
+
cos x
cos x
sen x
∫
∫
∫
∫
∫
da cui:
1
✌ ∫ sen x cos x dx = ln tan x + c
1
∫ senx dx
✔
x
x
Questo integrale si riconduce al precedente con la sostituzione sen x = 2 sen cos :
2
2
1
∫ sen x dx = ∫
1
dx
x
x
2 sen cos
2
2
1. Integrali indefiniti
Esercizio n. 1.3.17
14
da cui:
1
✌ ∫ sen x dx = ∫
1
x
x
d = ln tan + c
x
x 2
2
sen cos
2
2
Esercizio n. 1.3.18
1
∫ cos x dx
✔
π
Con la sostituzione cos x = sen – x , ci si riconduce all’integrale precedente:
2
1
∫ cos x dx = ∫
1
dx
π
sen – x
2
da cui:
dx
π
π
d
– x = ln tan – x + c
2
π
2
sen – x
2
✌ ∫ 1 dx = – 2 ∫
cos x
π
Esercizio n. 1.3.19
dx
∫ 1+ cos x
A)
✔
B)
Dalla formula:
cos x = cos2
Integrali di funzioni di una variabile reale
con la sostituzione sen2
mentre, poiché cos2
x
x
– 1⇒ 1+ cos x = 2 cos2
2
2
x
x
si ricava:
= 1− sen2
2
2
cos x = 1– 2 sen2
✌
A)
B)
∫
dx
=
1+ cos x
∫
dx
=
1– cos x
∫
∫
x
x
– sen2
2
2
x
x
si ottiene:
= 1− cos2
2
2
cos x = 2 cos2
✌
dx
∫ 1– cos x
dx
x
2 cos
2
=
2
dx
x
2 sen
2
2
=
∫
∫
d
x
2
x
cos
2
2
d
x
2
x
sen
2
2
x
x
⇒ 1+ cos x = 2 sen2
2
2
x
= tan + c
2
x
= – cotan + c
2
Indice Generale
125
Prefazione ..................................................................................................................... Pag.
3
■ 1 Integrali indefiniti
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
Integrale indefinito ................................................................................................
Integrale indefinito e misura dei rettangoloidi .......................................................
Integrali immediati ................................................................................................
Funzioni iperboliche .............................................................................................
Decomposizione in somma ..................................................................................
Formula di duplicazione cos2x = cos2x – sen2x ...................................................
Formule di addizione e sottrazione ......................................................................
Integrazione per parti ...........................................................................................
Formula di ricorrenza per il coseno ......................................................................
Formula di ricorrenza per il seno ..........................................................................
Formula di ricorrenza per il logaritmo ...................................................................
Formula di ricorrenza per la tangente ..................................................................
Formula di ricorrenza per la cotangente ..............................................................
Ulteriori formule di ricorrenza ...............................................................................
Formula di ricorrenza per funzioni razionali .........................................................
Integrazione per sostituzione ...............................................................................
Integrazione delle funzioni razionali .....................................................................
Ipotesi ∆ > 0 .........................................................................................................
Ipotesi ∆ = 0 .........................................................................................................
Ipotesi ∆ < 0 .........................................................................................................
Caso di radici tutte semplici .................................................................................
Caso di radici anche multiple ...............................................................................
Integrazione delle funzioni irrazionali ...................................................................
Integrali ellittici e iperellittici ..................................................................................
Integrazione di alcune funzioni trascendenti ........................................................
»
»
»
»
»
»
»
»
»
»
»
»
»
»
»
»
»
»
»
»
»
»
»
»
»
5
5
6
7
20
22
22
24
28
29
31
32
33
33
38
39
46
46
48
49
55
63
65
69
73
»
»
»
»
»
»
»
»
»
»
»
»
77
77
78
81
82
85
85
86
88
91
96
104
2.1
Integrale definito ...................................................................................................
Definizione basata sulle somme di Riemann .......................................................
Definizione basata sul limite .................................................................................
2.2 Condizioni di integrabilità .....................................................................................
2.3 Proprietà dell’integrazione definita .......................................................................
2.4 Funzioni monotone ...............................................................................................
2.5 Funzioni generalmente continue ..........................................................................
2.6 Teorema fondamentale ........................................................................................
2.7 Cambiamento della variabile di integrazione .......................................................
2.8 Integrale esteso a un intervallo improprio ............................................................
2.9 Integrale di funzioni non limitate ...........................................................................
2.10 Domini normali .....................................................................................................
Indice Generale
■ 2 Integrali definiti
126
■ 3 Applicazioni degli integrali alla geometria e alla fisica
Integrali di funzioni di una variabile reale
3.1
3.2
Solidi di rotazione ................................................................................................. Pag. 111
Momenti di inerzia ................................................................................................ » 115
Puntoexe: la nuova collana per la preparazione
degli esami universitari di Analisi e di Matematica
Pt1 • Limiti, continuità, calcolo differenziale
per funzioni di una variabile reale
Della stessa collana:
Pt2
Pt3
Pt4
Pt5
Pt6
Pt7
Pt8
Studio di funzioni
Integrali di funzioni di una variabile reale
Serie numeriche
Successioni e serie di funzioni
Limiti, continuità, calcolo differenziale per funzioni di più variabili reali
Integrali di funzioni di due o più variabili reali
Equazioni differenziali
Per conoscere le nostre novità editoriali consulta il sito internet:
www.sistemieditoriali.it/puntoexe
Cosa contiene il CD ROM
✔
Introduzione a Matlab
di Robert Bucher (della Scuola Universitaria Professionale della Svizzera Italiana)
Matlab è uno dei programmi scientifici di maggior diffusione, grazie alle sue numerose applicazioni in campi quali l’elettronica, la controllistica, l’analisi dei segnali, l’elaborazione di immagini, la chimica, la statistica e numerosi altri.
Viene utilizzato in molti corsi universitari e di ingegneria, e sono ormai numerose le pubblicazioni scientifiche che utilizzano l’ambiente di Matlab quale sostegno matematico della teoria.
✔
✔
Software free per il calcolo scientifico
Programmi (completamente gratuiti) alternativi a Matlab
Guida alle risorse Internet per gli studenti delle facoltà tecniche e scientifiche
Una esaustiva raccolta di link alle risorse gratuite disponibili online
Aggiornamenti, risorse, esercizi svolti sono disponibili al seguente indirizzo internet:
www.sistemieditoriali.it/puntoexe