4. Lavoro ed energia
Definizione di lavoro di una forza
Si considera un corpo di massa m in moto lungo una certa traiettoria. Si definisce lavoro
r
r
infinitesimo fatto dalla forza F durante lo spostamento infinitesimo dr la quantità data dal
prodotto scalare
r r
dW F • dr
e si misura in Joule (J).
-
la forza indicata nella definizione non è necessariamente la forza totale (data da
r r
m a = Ftot ) che determina la traiettoria: può essere semplicemente una delle forze che
agiscono sulla massa m
-
la forza per cui si calcola il lavoro infinitesimo è praticamente costante sul tratto
infinitesimo di traiettoria, ma può variare in direzione e modulo su un tratto finito. Il
lavoro totale lungo un arco di traiettoria AB è quindi la somma dei contributi infinitesimi:
r r
WA B = F • dr
B
A
-
Se la forza è perpendicolare alla traiettoria in ogni punto il lavoro che fa è nullo (prodotto
scalare di vettori perpendicolari!)
-
Se la forza è costante in direzione e modulo il lavoro dipende solo dallo spostamento da
A a B (cioè dalla posizione dei punti iniziale e finale), non dalla particolare traiettoria:
r B r r r r
WA B = F • dr = F •(rB rA )
A
ATTENZIONE: la forza di attrito dinamico è costante in modulo ma opposta alla velocità,
quindi generalmente variabile in direzione!
Definizione di potenza di una forza
Si definisce potenza istantanea (misurata in Watt, (W)) il lavoro svolto per unità di tempo su
un arco infinitesimo di traiettoria:
r
r
dW r
dr r
P(t) = F (t) •
= F (t) • v (t)
dt
dt
Teorema dell’energia cinetica
Consideriamo un corpo di massa m che si sposta da un punto A a un punto B lungo una certa
r
traiettoria determinata dalla forza totale F . Il lavoro infinitesimo lungo ogni trattino di
traiettoria si calcola dalla definizione, e usando la legge di Newton:
r
r
r
dv
r
r r
dW = F • dr = m • dr = m v • dv
dt
separando la variazione del vettore velocità nelle sue componenti normale alla traiettoria
(quella che esprime la variazione di direzione) e parallela alla traiettoria (quella che esprime
r
r r
r r r
r
la variazione del modulo, dv), osserviamo che v • dv = v • (dv// + dv ) = v • dv// = v dv , per
cui:
dW = m v dv =
1
2
m dv
2
r r vB 1
1
1
= F • dr = d m v 2 = m v 2B m v 2A
2
2
2
A
vA
B
WA B
Quindi, a prescindere dalla conoscenza della traiettoria completa e dei valori che assume la
forza in tutti i suoi punti, il lavoro (della forza totale) si può calcolare come differenza fra
l’energia cinetica K =
1
2
m v nelle posizioni finale (B) e iniziale (A):
2
WA B = K B K A
Forze conservative
r
Per definizione, una forza F è conservativa se il lavoro che compie per passare da una
posizione iniziale A a una finale B non dipende dalla forma della traiettoria, ma solo dalle
posizioni estreme. Quindi il lavoro di una forza conservativa su una traiettoria chiusa deve
essere nullo.
WA B = (U B UA )
Alle forze conservative è dunque possibile associare il concetto di energia potenziale U, in
modo che il lavoro della forza conservativa si possa esprimere mediante una differenza di U
dipendente solo dalle posizioni iniziale e finale. La scelta del segno è arbitraria, ed è fatta per
poter introdurre il concetto di energia totale meccanica nel seguito.
Inizialmente, consideriamo per semplicità un moto rettilineo, con uno spostamento
infinitesimo dx:
dW = U (x) U (x + dx) = F dx
F(x) = U (x + dx) U( x)
dU
=
dx
dx
Questo fornisce la relazione tra forza ed energia potenziale, cioè ci dice come calcolare la
forza data l’espressione dell’energia potenziale o viceversa.
NOTA: l’energia potenziale è definita a meno di una costante additiva.
Nel caso più complicato del moto nello spazio, anzichè lungo una linea retta, si può ancora
introdurre l’energia potenziale U che dipende solo dalla posizione. La variazione di U si può
esprimere come somma delle possibili variazioni nelle tre direzioni x,y,z:
r r
dW = U (x, y,z ) U (x + dx,y + dy,z + dz) = F • dr
U
U
U
dx dy dz = Fx dx + Fy dy + Fz dz
x
y
z
avendo considerato la rapidità di variazione di U lungo le tre possibili direzioni (cosiddette
“derivate parziali”). Questo deve valere per tutte le possibili componenti dx, dy, dz. Quindi si
ha:
Fx = U
U
U
, Fy = , Fz = y
x
z
Sinteticamente si introduce il concetto di gradiente, come operatore vettoriale che trasforma
r
la grandezza scalare U nella forza F :
r
r
r
r U r U r U
r r +j
+k
j
k
F = grad (U ) = U = i
U
=
i
x
x
y
z
y
z Teorema di conservazione dell’energia
Distinguiamo le forze conservative (c) agenti su un corpo da quelle non conservative (nc), e
sfruttiamo il teorema dell’energia cinetica:
(nc)
KB KA = WA(c) B + WA(nc)
B = (UB U A ) + WA B
(KB + UB ) (K A + UA ) = WA(nc)B
(nc)
Etot = WA B , Etot K + U
Quindi:
-
si può definire un’energia totale “meccanica”, somma di energia cinetica e potenziale
-
la variazione di energia totale è nulla se tutte le forze sono conservative, cioè si conserva
l’energia totale in tutti i punti della traiettoria
-
in presenza di forze non conservative, l’energia meccanica non si conserva: le forze di
attrito (lavoro < 0) tendono a diminuirla, mentre le forze motrici (lavoro > 0) tendono ad
aumentarla
OSSERVAZIONE: nei problemi in cui non sono richieste informazioni riguardanti il tempo
(quanto tempo perchè avvenga un certo spostamento, ecc.), ma solo riguardanti la posizione o
la velocità, conviene decisamente utilizzare il concetto di energia totale e conservazione,
quando possibile.
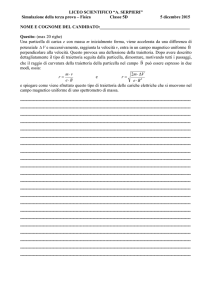
Esempio: energia potenziale gravitazionale (vicino a Terra).
A
y
g
rA
B
rB
O
x
L’unica ipotesi è che l’accelerazione di gravità sia costante. Allora anche la forza peso lo è, e
il lavoro
r r r
WA B = m g • (rB rA ) = m (g y B + g y A )
WA B = (m g y B m g y A )
Quindi l’energia potenziale associata alla forza peso è U = m g y , e il lavoro dipende solo
dalla differenza di quota y. Se avessimo scelto un riferimento con y diretta verso il basso
avremmo trovato U = m g y .
Si noti che prendendo la derivata dU / dy si trova esattamente la componente y della forza
peso, il cui segno dipende dalla scelta della direzione dell’asse y.
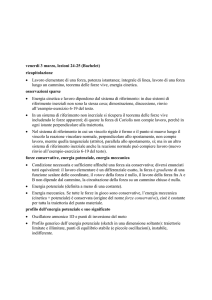
Esempio: energia potenziale elastica.
La forza elastica esercitata dalla molla deformata di una quantità x rispetto alla sua lunghezza
di riposo è data da F = k x (vedi disegno). Quindi F>0 se la molla è compressa (x<0) e F<0
se è allungata (x>0).
k
F=-kx
m
0
x
x
Poichè la forza elastica dipende solo dalla posizione della massa m attaccata all’estremità
della molla, si può calcolare il lavoro esplicitamente:
xB
xB
1
1
1
WA B = (k x)dx = k x 2 = k x 2B k x 2A 2
x A
2
2
xA
Quindi risulta U =
1 2
dU
k x , e per verifica F = = k x .
2
dx
Esempio: Un pendolo di lunghezza L, col filo teso orizzontalmente, è lasciato cadere verso il
bass partendo da fermo. Calcolare la tensione del filo quando questo passa per la posizione
verticale.
Usiamo innanzitutto la conservazione dell’energia. Le forze in gioco (sistema di riferimento
inerziale!) sono la forza peso (conservativa) e la tensione della fune T. Si noti che la tensione,
come tutte le reazioni vincolari senza attriti, sono perpendicolari alla direzione del moto,
quindi non fanno lavoro.
Eguagliando l’energia totale iniziale a quella corrispondente all’istante in cui il pendolo passa
per la verticale si può calcolare la velocità:
1
2
0 + mg L = mv + 0
2
Per calcolare T basta scrivere la legge di Newton per la massa m corrispondente alla
disposizione verticale (l’accelerazione di m è quella centripeta, verso l’alto):
v2
m = T mg
L
T=m
v2
+ m g = 3m g
L
Esempio: Determinare quanto spazio occorre per arrestare il moto di un oggetto di massa m
lanciato con velocità iniziale v0 su un piano orizzontale, con coefficiente di attrito dinamico
μd .
La forza di attrito dinamico è f = μd N , e in questo caso N = m g .
L’energia totale (tutta cinetica in questo caso) diminuisce dal valore iniziale fino a 0, per via
del lavoro fatto dalla forza di attrito, opposta alla velocità:
Etot = WA(nc)
B
1
0 m v20 = f L = μ d m g L
2
L=
v02
2 μd g
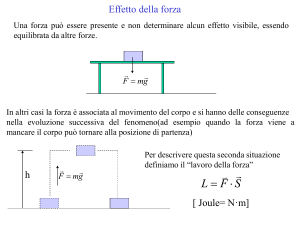
Punti di equilibrio
È possibile discutere l’esistenza di punti di equilibrio di un sistema conservativo e il loro tipo
(stabile, instabile) in base all’analisi delle curve di energia potenziale. Consideriamo per
esempio un sistema unidimensionale: l’energia meccanica totale (costante rispetto alla
posizione generica x occupata dalla massa m) è data da
Etot 1
2
m v (x) + U( x)
2
1
2
m v (x) = Etot U(x)
2
Quindi l’energia cinetica è positiva solo per le posizioni x per cui U<Etot: l’insieme di queste
posizioni determina le regioni dell’asse x in cui può effettivamente muoversi la massa m se la
sua energia meccanica totale è Etot.
U(x)
E2
F=-dU/dx
F=-dU/dx
E1
c
A
B
a C b
d
x
Nell’esempio grafico riportato sopra, la regione di moto permesso per Etot=E1 è a<x<b,
mentre per Etot=E2 è c<x<d.
In particolare, i punti di minimo o massimo di U(x) rappresentano stati di equilibrio, nel
senso che la forza in quelle posizioni è per definizione F(x) = dU dx =0. Pertanto, un corpo
che occupa una posizione di equilibrio con velocità nulla (fermo) tende a rimanervi
indefinitamente. (punti A, B e C nell’esempio grafico precedente)
I punti di minimo di U(x) rappresentano situazioni di equilibrio stabile perchè con un piccolo
spostamento
verso
destra
la
massa
m
inizialmente
ferma
subisce
una
forza
F(x) = dU dx <0, cioè diretta in senso opposto allo spostamento (forza di richiamo verso la
posizione di equilibrio stabile). Analogamente succede se lo spostamento avviene verso
sinistra. (punti A e C nell’esempio grafico precedente)
Con lo stesso ragionamento si mostra che i punti di massimo di U(x) rappresentano situazioni
di equilibrio instabile perchè con un piccolo spostamento verso destra la massa m
inizialmente ferma subisce una forza F(x) = dU dx >0, cioè diretta come lo spostamento
(causa un moto di progressivo allontamento dalla posizione di equilibrio). Analogamente
succede se lo spostamento avviene verso sinistra. (punto B nell’esempio grafico precedente)