1 Le funzioni reali di variabile reale
1.1 Le funzioni
Definizione
Una funzione 𝑓: 𝐴 → 𝐵 è una relazione che associa a ciascuno degli elementi di un insieme 𝐴 (il dominio)
uno ed uno solo degli elementi di un insieme 𝐵 (il codominio).
Una funzione è detta:
- iniettiva quando a elementi distinti del dominio corrispondono elementi distinti del codominio;
- suriettiva quando ciascun elemento del codominio è associato ad almeno uno degli elementi del dominio;
- biunivoca (o biettiva) quando è sia iniettiva che suriettiva.
Due funzioni 𝑓(𝑥) e 𝑔(𝑥) sono uguali se hanno identico dominio 𝐴 e codominio 𝐵 e se ∀𝑥 ∈ 𝐴 si ha:
𝑓(𝑥) = 𝑔(𝑥).
Una funzione in due (o più) variabili è una funzione che ha come dominio il prodotto cartesiano di due (o
più) insiemi.
1.2 La funzione reale di variabile reale
Una funzione 𝑓: 𝐴 → 𝐵 si dice funzione reale di variabile reale quando sia il dominio che il codominio
sono sottoinsiemi di ℝ. In questo caso la funzione può essere rappresentata su un piano cartesiano
riportando sull'asse delle ascisse i valori 𝑥 ∈ 𝐴 del dominio e sull'asse delle ordinate i valori 𝑦 ∈ 𝐵,
scrivendo: 𝑓(𝑥) = 𝑦. Con questa notazione si individuano dei punti sul piano cartesiano (𝑥, 𝑓(𝑥)) che
rappresentano i punti del grafico della funzione.
1.2.1 La funzione inversa di 𝑓(𝑥) = 𝑦
Nel caso che 𝑓: 𝐴 → 𝐵 sia una funzione biunivoca (o biettiva) se ne può definire la funzione inversa: la
funzione inversa di 𝑓 è la funzione biunivoca 𝑓 −1 : 𝐵 → 𝐴 che associa ad ogni 𝑦 di 𝐵 il valore 𝑥 di 𝐴 tale
che 𝑦 = 𝑓(𝑥).
Per calcolare, se esiste, l’inversa della funzione 𝑓(𝑥) = 𝑦 si procede semplicemente a ricavare la
variabile 𝑥 in funzione della variabile 𝑦 nell’espressione 𝑓(𝑥) = 𝑦. Se la funzione inversa esiste solo in
una parte del dominio della funzione 𝑓 , spesso la si definisce in un sottoinsieme del dominio in cui la
funzione risulti biunivoca.
1.2.2 La composizione di due funzioni
Siano 𝑓: 𝐴 → 𝐵 e 𝑔: 𝐵 → 𝐶 due funzioni reali di variabile reale tali che il codominio di 𝑓 coincida
col dominio di 𝑔; allora si chiama funzione composta 𝑔 ∘ 𝑓: 𝐴 → 𝐶 la funzione che ad ogni elemento
𝑥 ∈ 𝐴 (cui corrisponde l’elemento 𝑓(𝑥) ∈ 𝐵) fa corrispondere l’elemento 𝑔[𝑓(𝑥)] ∈ 𝐶 .
Si noti che, nel caso domini e codomini permettano di definire sia 𝑔 ∘ 𝑓 che 𝑓 ∘ 𝑔, in generale si ha che
𝑔 ∘ 𝑓 ≠ 𝑓 ∘ 𝑔.
1.3 Le trasformazioni geometriche: le isometrie
Una trasformazione geometrica nel piano è una corrispondenza biunivoca che associa a ciascun punto del
piano un unico punto del piano stesso (non si tratta di una funzione reale di variabile reale perché dominio e
codominio sono rappresentati dal piano ℝ × ℝ e non da sottoinsiemi di ℝ).
Una trasformazione geometrica quindi associa a ciascun punto 𝐴 ≡ (𝑥, 𝑦) del piano il punto trasformato
𝐴′ ≡ (𝑥 ′ , 𝑦 ′ ) mediante opportune equazioni della trasformazione. Si chiama punto unito della
trasformazione ogni punto che sia il trasformato di se stesso.
Le isometrie sono particolari trasformazioni geometriche che conservano le distanze, trasformando quindi
figure geometriche in figure congruenti.
1.3.1 Le traslazioni
Una traslazione è una isometria di equazioni:
𝑥′ = 𝑥 + 𝑎
𝑥 = 𝑥′ − 𝑎
⟹{
{ ′
𝑦 =𝑦+𝑏
𝑦 = 𝑦′ − 𝑏
Qualsiasi siano 𝑎, 𝑏 ∈ ℝ, l’effetto di una traslazione è quello di spostare ogni punto del piano
orizzontalmente del valore 𝑎 e verticalmente del valore 𝑏. Nel caso di una funzione 𝑓(𝑥) = 𝑦, si avrà
per il grafico della funzione traslata 𝑓 (𝑥 ′ − 𝑎) = 𝑦 ′ − 𝑏 ⟹ 𝑦 ′ = 𝑓 (𝑥 ′ − 𝑎) + 𝑏.
1.3.2 Le simmetrie
Le simmetrie sono isometrie che associano ad ogni punto del piano un punto ad esso speculare rispetto ad
una data figura geometrica. Noi ci occuperemo della simmetria assiale e della simmetria centrale.
La simmetria assiale è una simmetria rispetto ad una data retta 𝑟: ciascun punto 𝐴 ≡ (𝑥, 𝑦) del piano
viene associato al punto trasformato 𝐴′ ≡ (𝑥 ′ , 𝑦 ′ ) in modo tale che la retta 𝑟 sia asse del segmento
̅̅̅̅̅
𝐴𝐴′ . La retta 𝑟 è detta asse di simmetria: è formata da tutti e soli i punti uniti della trasformazione.
La simmetria centrale è una simmetria rispetto ad un dato punto 𝑃: ciascun punto 𝐴 ≡ (𝑥, 𝑦) del piano
viene associato al punto trasformato 𝐴′ ≡ (𝑥 ′ , 𝑦 ′ ) in modo tale che il punto 𝑃 sia punto medio del
̅̅̅̅̅′ . Il punto 𝑃 è detto centro di simmetria: è l’unico punto unito della trasformazione.
segmento 𝐴𝐴
Data una funzione 𝑦 = 𝑓(𝑥) si può dimostrare che:
𝑦 = −𝑓(𝑥) ha grafico simmetrico a quello di 𝑓(𝑥) rispetto all’asse 𝑥 ;
𝑦 = 𝑓(−𝑥) ha grafico simmetrico a quello di 𝑓(𝑥) rispetto all’asse 𝑦;
𝑦 = −𝑓(−𝑥) ha grafico simmetrico a quello di 𝑓(𝑥) rispetto all’origine.
Nel caso della funzione 𝑦 = |𝑓(𝑥)| è sufficiente notare che nei tratti in cui 𝑓(𝑥) ≥ 0 si avrà |𝑓(𝑥)| =
𝑓(𝑥), mentre nei tratti in cui 𝑓(𝑥) < 0 si avrà |𝑓(𝑥)| = −𝑓(𝑥), con le ovvie conseguenze sul grafico.
2 Potenze ad esponente reale
Abbiamo visto come una potenza ad esponente relativo richieda base non negativa per evitare possibili valori
𝑚
𝑛
𝑛
negativi di un radicando ad indice pari; infatti per ogni 𝑎 ∈ ℝ (con 𝑎 > 0) 𝑎 = √𝑎𝑚 . Sappiamo inoltre
che ogni numero reale 𝑥 può essere approssimato a piacere con un numero razionale 𝑚⁄𝑛 (in cui 𝑚 è
intero e 𝑛 è naturale); allora la potenza reale (di base 𝑎 ≥ 0) 𝒂𝒙 ha senso come risultato della indefinita
e sempre più accurata reiterazione di tale approssimazione. Le proprietà delle potenze ad esponente reale sono
le stesse, ovviamente, di quelle ad esponente razionale:
𝑎0 = 1
𝑎 𝑥 𝑎 𝑦 = 𝑎 𝑥+𝑦
𝑎𝑥
= 𝑎 𝑥−𝑦
𝑦
𝑎
𝑎 𝑥 𝑏 𝑥 = (𝑎𝑏)𝑥
𝑎𝑥
𝑎 𝑥
=( )
𝑏𝑥
𝑏
(𝑎 𝑥 )𝑦 = 𝑎 𝑥𝑦
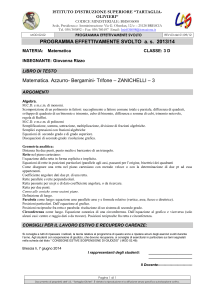
2.1 La funzione esponenziale
Si chiama funzione esponenziale la funzione reale di
variabile reale 𝑓(𝑥) = 𝑎 𝑥 con 𝑎 > 0.
Nel caso banale 𝑎 = 1 la funzione si riduce alla retta
𝑓(𝑥) = 1.
A parte questo caso banale, la funzione esponenziale è:
positiva, poiché ∀𝑥 ∈ ℝ (con 𝑎 > 0) ⟹ 𝑎 𝑥 > 0
strettamente monotona (quindi invertibile), poiché
𝑎 𝑥 > 𝑎 𝑦 se 𝑎 > 1
∀𝑥, 𝑦 ∈ ℝ (con 𝑥 > 𝑦) ⟹ { 𝑥
𝑎 < 𝑎 𝑦 se 𝑎 < 1
Ciò significa che 𝑓(𝑥) = 𝑎 𝑥 è una funzione strettamente
decrescente per 0 < 𝑎 < 1 e strettamente crescente per
𝑎 > 1); infine, ha come dominio ℝ e codominio ℝ+ .
2.2 I logaritmi
Dati 𝑎 e 𝑏 numeri reali positivi con 𝑎 ≠ 1, il logaritmo in base 𝑎 del numero 𝑏 è l'esponente a cui
elevare 𝑎 per ottenere 𝑏. Quindi:
𝑐 = log 𝑎 𝑏 ⟹ 𝑎𝑐 = 𝑏 ⟹ 𝑎log𝑎 𝑏 = 𝑏
Le principali proprietà dei logaritmi sono le seguenti (con le indicazioni ln e log si intendono
rispettivamente il logaritmo in base 𝑒, numero di Nepero, e in base 10):
𝐥𝐨𝐠 𝒂 𝒃𝒄 = 𝐥𝐨𝐠 𝒂 𝒃 + 𝐥𝐨𝐠 𝒂 𝒄
𝐥𝐨𝐠 𝒂 𝒃𝒄 = 𝒄 𝐥𝐨𝐠 𝒂 𝒃
𝑥 = log 𝑎 𝑏
𝑥 = log 𝑎 𝑏,
𝑦 = log 𝑎 𝑐 , 𝑧 = log 𝑎 𝑏𝑐 ⟹
𝑎 𝑥 = 𝑏 ⟹ 𝑎𝑐𝑥 = 𝑏 𝑐 ⟹
𝑏𝑐 = 𝑎 𝑧 = 𝑎 𝑥 ∙ 𝑎 𝑦 = 𝑎 𝑥+𝑦
log 𝑎 𝑎𝑐𝑥 = log 𝑎 𝑏 𝑐 ⟹
⟹𝑧 =𝑥+𝑦
𝑐𝑥 = 𝑐log 𝑎 𝑏 = log 𝑎 𝑏 𝑐
infatti se:
𝒃
= 𝐥𝐨𝐠 𝒂 𝒃 − 𝐥𝐨𝐠 𝒂 𝒄
𝒄
dai precedenti con 1⁄𝑐 = 𝑐 −1
𝐥𝐨𝐠 𝒂
infatti, se:
𝒏
𝐥𝐨𝐠 𝒂 √𝒃 =
1
dai precedenti con √𝑏 = 𝑏 𝑛
𝐥𝐨𝐠 𝒃 𝒙
𝐥𝐨𝐠 𝒃 𝒂
𝑐 = log 𝑎 𝑥 ⟹
𝑎 = 𝑥 ⟹ log 𝑏 𝑎𝑐 =
𝑐 log 𝑏 𝑎 = log 𝑏 𝑥 ⟹
log 𝑏 𝑥
𝑐=
= log 𝑎 𝑥
log 𝑏 𝑎
infatti, se:
𝟏
𝐥𝐨𝐠 𝒂 𝒃
𝒏
𝑛
𝐥𝐨𝐠 𝒂 𝒙 =
𝑐
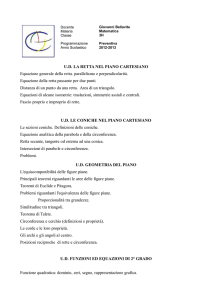
2.3 Funzione logaritmica
Consideriamo ora (per 𝑎 > 0, 𝑎 ≠ 1) la funzione logaritmica:
𝑓(𝑥) = log 𝑎 𝑥 ; è una funzione strettamente monotona
(decrescente per 0 < 𝑎 < 1 e crescente per 𝑎 > 1); ha come
dominio ℝ+ e come codominio ℝ.
2.4 Equazioni esponenziali e logaritmiche
L'equazione esponenziale elementare 𝒂𝒙 = 𝒃 (con 𝑎 > 0, 𝑎 ≠ 1,
𝑏 > 0 ) ammette una ed una sola soluzione. Le equazioni
esponenziali più comuni sono classificate come segue.
2.4.1 Equazioni esponenziali riducibili alla stessa base
In questo caso, dopo aver ridotto l'equazione alla stessa base, è
sufficiente uguagliare gli esponenti; per esempio:
𝟓𝒙
𝟐 +𝟐
𝟐𝟕
𝒙
= 𝟏𝟐𝟓𝒙 ⟹ 5𝑥
𝒙𝟐 −𝟏
2 +2
3(𝑥 2 −1)
=𝟏⟹3
𝑥 2 −𝑥
𝑥
√𝟕𝒙𝟐 −𝒙 = 𝟒𝟗 ⟹ 7
= 53𝑥 ⟹ 𝑥 2 + 2 = 3𝑥 ⟹ 𝑥 2 − 3𝑥 + 2 = 0 ⟹ 𝑥1 = 1,
𝑥2 = 2
= 30 ⟹ 3𝑥 2 − 3 = 0 ⟹ 3𝑥 2 = 3 ⟹ 𝑥 2 = 1 ⟹ 𝑥1,2 = ±1
= 49 ⟹ 7𝑥−1 = 72 ⟹ 𝑥 − 1 = 2 ⟹ 𝑥 = 3
2.4.2 Equazioni esponenziali riducibili ad equazioni algebriche
In questo caso, dopo aver ridotto l'equazione ad una equazione algebrica mediante una sostituzione
dell'incognita, si risolve l'equazione algebrica e poi si torna all'incognita iniziale; per esempio:
𝟗 ∙ 𝟗𝒙 − 𝟖𝟐 ∙ 𝟑𝒙 + 𝟗 = 𝟎 ⟹ 9 ∙ 32𝑥 − 82 ∙ 3𝑥 + 9 = 0 ⟹ 9𝑡 2 − 82𝑡 + 9 = 0
𝑡1 = 9 ⟹ 3𝑥 = 9 = 32 ⟹ 𝑥1 = 2
⟹{
1
1
𝑡2 = ⟹ 3𝑥 = = 3−2 ⟹ 𝑥2 = −2
9
9
−𝒙
𝟏−𝟑
1 𝑥
1 2𝑥
𝟏−𝒙
−𝑥
−𝑥
−𝑥
−2𝑥
=𝟗
⟹ 1 − 3 = 8 ∙ 9 ∙ 9 ⟹ 1 − 3 = 72 ∙ 3
⟹ 1 − ( ) = 72 ( )
𝟖
3
3
1
1 𝑥 1
1 2
𝑡1 = ⟹ ( ) = = ( ) ⟹ 𝑥1 = 2
1 2𝑥
1 𝑥
9
3
9
3
⟹ 72 ( ) + ( ) − 1 = 0 ⟹ 72𝑡 2 + 𝑡 − 1 = 0 ⟹
𝑥
3
3
1
1
1
{𝑡2 = − 8 ⟹ (3) = − 8 = 𝑖𝑚𝑝𝑜𝑠𝑠𝑖𝑏𝑖𝑙𝑒
2.4.3 Equazioni esponenziali risolvibili con i logaritmi - Equazioni logaritmiche
Sia che si stia trattando una equazione esponenziale non riducibile oppure una equazione propriamente
logaritmica (cioè con l'incognita che compare nell'argomento di un logaritmo), lo scopo è di trasformare
l'equazione, grazie alle proprietà dei logaritmi, nella forma:
𝐴(𝑥)>0
𝐵(𝑥)>0
log 𝑎 𝐴(𝑥) = log 𝑎 𝐵(𝑥) ⇒
𝐴(𝑥) = 𝐵(𝑥)
Se questo è possibile, si risolve l'espressione data avendo cura di verificare le soluzioni ottenute perché
potrebbero contravvenire alle condizioni di esistenza dei logaritmi di partenza. Alcuni esempi:
𝟏
1
1
𝐥𝐨𝐠(𝟐𝒙 − 𝟏) + 𝐥𝐨𝐠 √𝒙 − 𝟗 = 𝟏 ⟹ log(2𝑥 − 1) + log(𝑥 − 9) = 1 ⟹ log[(2𝑥 − 1)(𝑥 − 9)] = 2
𝟐
2
2
⟹ log[(2𝑥 − 1)(𝑥 − 9)] = log 102 ⟹ (2𝑥 − 1)(𝑥 − 9) = 102 ⟹ 2𝑥 2 − 19𝑥 − 91 = 0 ⟹
7
𝑥1 = 13,
𝑥2 = −
2
La seconda soluzione è inaccettabile perché rende inconsistenti i logaritmi (le cui condizioni di esistenza
1
sono: 𝑥 > 2 , 𝑥 > 9).
𝟗 ∙ 𝟓𝟑𝒙 = 𝟏𝟐 ∙ 𝟕𝟐𝒙
=
log 4 − log 3
3 log 5 − 2 log 7
4
𝑥
𝑥
log 3
53𝑥 12
53
4
53
53
4
⟹ 2𝑥 =
⟹ ( 2 ) = ⟹ log ( 2 ) = 𝑥 log ( 2 ) = log ⟹ 𝑥 =
⟹𝑥
53
7
9
7
3
7
7
3
log ( 2 )
7
2.5 Disequazioni esponenziali e logaritmiche
Le disequazioni logaritmiche, oppure quelle esponenziali alle quali possano applicarsi i logaritmi, sono
risolvibili quando si possa passare alla relativa disuguaglianza fra gli argomenti: è necessario ricordare che
in questo passaggio il segno della disequazione non cambia se la base è maggiore dell’unità, deve essere
invertito invece in caso contrario. Nel nostro corso applicheremo sempre logaritmi naturali o in base 10,
senza avere problemi per il segno della disequazione.
2.5.1 Disequazioni esponenziali risolvibili con i logaritmi - Equazioni logaritmiche
Sia che si stia trattando una disequazione esponenziale non riducibile oppure una disequazione propriamente
logaritmica (cioè con l'incognita che compare nell'argomento di un logaritmo), lo scopo è di trasformare
l'equazione, grazie alle proprietà dei logaritmi, nella forma (indipendentemente, come al solito, dal segno
della disequazione):
log 𝑎 𝐴(𝑥) > log 𝑎 𝐵(𝑥)
Se questo è possibile, si risolve l'espressione data avendo cura di verificare le soluzioni ottenute perché
potrebbero contravvenire alle condizioni di esistenza dei logaritmi di partenza. Ponendosi nel caso 𝑎 > 1, si
ha che questa disequazione è risolta dal sistema di disequazioni formato dalle condizioni di esistenza dei
logaritmi e dalla disequazione corrispondente degli argomenti:
𝐴(𝑥) > 0
log 𝑎 𝐴(𝑥) > log 𝑎 𝐵(𝑥) ⇒ { 𝐵(𝑥) > 0
𝐴(𝑥) > 𝐵(𝑥)
5
3 Le funzioni goniometriche
3.1 La misura degli angoli
L’angolo (ciascuna delle due parti in cui un piano risulta diviso da due semirette con l’origine in comune) è
il soggetto dello studio della goniometria; più precisamente lo è la sua misura (ampiezza). Due angoli
congruenti hanno la medesima ampiezza, che può essere misurata a partire da un angolo campione utilizzato
come unità di misura. Nel sistema sessagesimale questa unità di misura (chiamata grado sessagesimale ed
indicata con °) è un angolo di ampiezza pari alla 360esima parte di un angolo giro; a sua volta, la
sessantesima parte di un grado è detta primo (') e la sessantesima parte di un primo è detta secondo (").
Questo sistema ha larga applicazione nell’uso comune e nella topografia: si pensi ad esempio al sistema di
coordinate geografiche formate da meridiani e paralleli. In campo scientifico invece viene utilizzato il
sistema analitico che utilizza come unità di misura il radiante (rad). Il valore in radianti dell’ampiezza di
un angolo viene definito come il rapporto tra la lunghezza dell’arco individuato su una qualsiasi
circonferenza con centro nel vertice dell’angolo e la lunghezza del suo raggio; la proporzionalità tra archi e
raggi di circonferenze concentriche garantisce l’univocità di tale unità di misura. Il radiante è un’unità di
misura adimensionale (è rappresentato dal rapporto tra due lunghezze); inoltre, poiché la circonferenza
misura 2𝜋𝑅 , si ha che un angolo giro misura 2𝜋 𝑟𝑎𝑑 . Infine, la relazione tra l’ampiezza di un angolo 𝛼 in
gradi sessagesimali (𝛼°) e in radianti (𝛼 𝑟𝑎𝑑 ) è data da:
𝛼 𝑟𝑎𝑑 = 𝛼°
𝜋
180°
⟺ 𝛼° = 𝛼 𝑟𝑎𝑑
180°
𝜋
3.1.1 Gli angoli orientati e la circonferenza goniometrica
Un angolo può essere anche visto come l’effetto della rotazione di una semiretta che abbia come centro di
rotazione la sua origine: l’angolo sarebbe la parte di piano “spazzata” dalla semiretta nel corso della sua
rotazione. La posizione iniziale della semiretta individua il lato origine dell’angolo, mentre la posizione
finale individua il lato termine dell’angolo. In questo senso possiamo parlare di angolo orientato:
l’orientamento è dato dal verso della rotazione; per convenzione, si pone positiva l’ampiezza di un angolo
ottenuto con una rotazione antioraria e negativa l’ampiezza di un angolo ottenuto con una rotazione oraria.
Dato un piano cartesiano, si chiama circonferenza goniometrica la circonferenza di raggio unitario che
abbia come centro l’origine degli assi. In questa circonferenza, preso come lato origine l’asse 𝑥 positivo,
ogni angolo da esso ottenibile è univocamente determinato dal punto di intersezione tra il lato termine e la
stessa circonferenza goniometrica; il punto (0,1) è detto origine degli archi.
3.2 Le principali funzioni goniometriche
Le funzioni goniometriche sono funzioni che associano un numero reale all’ampiezza di un angolo: in
generale quindi non sono funzioni reali di variabile reale, appunto perché la variabile è una quantità che
rappresenta un’ampiezza e può dimensionalmente essere rappresentata, ad esempio, da gradi sessagesimali.
Questo è il motivo per cui in campo scientifico si usa il sistema analitico, in cui le ampiezze sono
adimensionalmente rappresentate da radianti ed in cui quindi le funzioni goniometriche sono funzioni reali
di variabile reale.
A ciascun angolo 𝛼 individuabile sulla circonferenza goniometrica (che individua il punto 𝐵 ≡ (𝑥𝐵 , 𝑦𝐵 )
di intersezione tra il lato termine e la circonferenza), la funzione coseno associa il rapporto tra il
corrispondente valore dell’ascissa ed il raggio (unitario), mentre la funzione seno associa il rapporto tra il
corrispondente valore dell’ascissa ed il raggio (unitario):
𝑥𝐵
= 𝑥𝐵
𝑟
𝑦𝐵
sin 𝛼 =
= 𝑦𝐵
𝑟
cos 𝛼 =
6
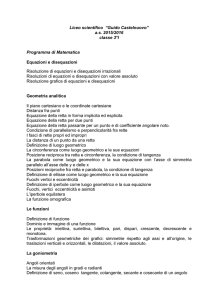
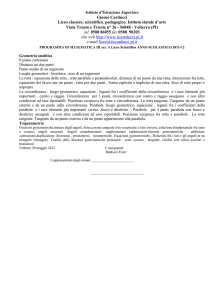
3.2.1 Proprietà e grafici di seno e coseno
Alcune proprietà immediate di queste due funzioni sono date dal fatto che le ampiezze possono assumere
qualsiasi valore, quindi il loro dominio è
ℝ; il massimo e il minimo valore di
ascissa e ordinata dei punti della
circonferenza goniometrica sono 1 e
−1, quindi il loro codominio è dato
dall’insieme dei valori tra questi
compresi; inoltre, ogni volta che si
effettua una rotazione pari ad un angolo
giro i valori si ripetono nuovamente
SINUSOIDE
identici, quindi le due funzioni sono
periodiche di periodo 2𝜋.
Inoltre, per il teorema di Pitagora si ha che 𝑥𝐵 2 + 𝑦𝐵 2 = 𝑟 2 , quindi (visto che il raggio della
circonferenza goniometrica è unitario):
sin2 𝛼 + cos 2 𝛼 = 1
Questa rappresenta la prima relazione
fondamentale della goniometria. Da
questa relazione si può ricavare il valore
di una delle due funzioni goniometriche
di un angolo quando se ne conosce il
valore dell’altra.
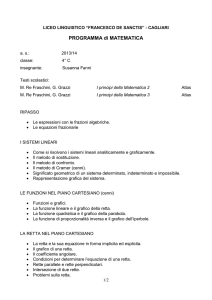
Una interessante considerazione
riguarda il fatto che si potrebbe usare
una qualsiasi circonferenza con centro
COSINUSOIDE
nell’origine (non necessariamente
unitaria) per la definizione delle due funzioni seno e coseno: infatti ogni angolo individuerebbe sulla
circonferenza generica e su quella goniometrica due angoli retti dati da ascissa ed ordinata del punto di
intersezione come cateti e raggio come ipotenusa: il fatto che questi due angoli siano simili garantisce
l’uguaglianza dei rapporti che definiscono ciascuna
funzione.
I grafici di seno e coseno sono chiamati sinusoide e
cosinusoide e sono sovrapponibili con una
𝜋
traslazione orizzontale pari a .
2
3.2.2
Le funzioni tangente e cotangente
Si definisce la funzione tangente come rapporto
(dove definito) tra la funzione seno e la funzione
coseno; si definisce la funzione cotangente come
reciproco (dove definito) della funzione tangente:
sin 𝛼
cos 𝛼
1
cos 𝛼
ctg 𝛼 =
=
tg 𝛼 sin 𝛼
tg 𝛼 =
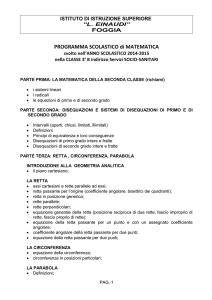
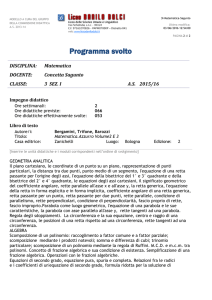
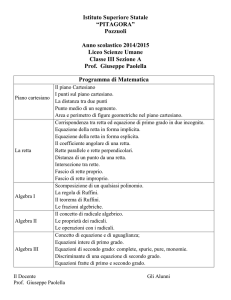
Dal punto di vista geometrico, si può notare che la
funzione tangente assume, per ciascun angolo per
cui è definita, il valore della lunghezza del
Figura 1
7
segmento staccato sulla retta tangente alla circonferenza goniometrica nell’origine degli archi (0,1) dal
prolungamento del raggio. Analogamente, la cotangente assume il valore della lunghezza del segmento
staccato sulla retta tangente alla circonferenza goniometrica nel punto (1,0) dal prolungamento del raggio.
Infatti, facendo riferimento alla tangente, per la similitudine dei triangoli 𝑂𝐵𝐶 e 𝑂𝐴𝐺, si ha che (vedi
figura 1):
̅̅̅̅
sin 𝛼 ̅̅̅̅
𝐶𝐵 𝐺𝐴
̅̅̅̅
tg 𝛼 =
=
=
= 𝐺𝐴
̅̅̅̅ ̅̅̅̅
cos 𝛼 𝑂𝐵
𝑂𝐴
3.2.3 Valori delle funzioni goniometriche di angoli particolari
𝜋 𝜋 𝜋 𝜋
Con banali considerazioni su angoli particolari (0, , , , ) che corrispondono a configurazioni riferibili a
6 4 3 2
triangoli equilateri o rettangoli isosceli sulla circonferenza trigonometrica, si ottengono i seguenti valori:
sin 0 = cos
sin
sin
𝜋
=0
2
tg 0 = ctg
𝜋
𝜋 1
= cos =
6
3 2
tg
𝜋
𝜋 √2
= cos =
4
4
2
𝜋
𝜋
1
= ctg =
6
3 √3
tg
𝜋
𝜋 √3
sin = cos =
3
6
2
𝜋
sin = cos 0 = 1
2
tg
tg
𝜋
=0
2
𝜋
𝜋
= ctg = 1
4
4
𝜋
𝜋
= ctg = √3
3
6
𝜋
= ctg 0 = 𝑖𝑛𝑑𝑒𝑓𝑖𝑛𝑖𝑡𝑎
2
3.2.4 Le funzioni goniometriche di angoli associati
Si dicono angoli associati ad un qualsiasi angolo 𝛼 tutti quegli angoli che differiscono da 𝛼 di un multiplo
𝜋
di . Per questi angoli valgono le seguenti relazioni, facilmente derivabili dall’osservazione della loro
2
posizione sulla circonferenza goniometrica:
sin(𝜋 − 𝛼) = sin 𝛼
cos(𝜋 − 𝛼) = −cos 𝛼
tg(𝜋 − 𝛼) = −tg 𝛼
sin(𝜋 + 𝛼) = −sin 𝛼
cos(𝜋 + 𝛼) = −cos 𝛼
tg(𝜋 + 𝛼) = tg 𝛼
sin(−𝛼) = sin(2𝜋 − 𝛼)
= −sin 𝛼
cos(−𝛼) = cos(2𝜋 − 𝛼)
= cos 𝛼
tg(−𝛼) = tg(2𝜋 − 𝛼) = −tg 𝛼
𝜋
sin ( − 𝛼) = cos 𝛼
2
𝜋
cos ( − 𝛼) = sin 𝛼
2
𝜋
cos 𝛼
1
tg ( − 𝛼) =
=
2
sin 𝛼 tg 𝛼
𝜋
sin ( + 𝛼) = cos 𝛼
2
𝜋
cos ( + 𝛼) = − sin 𝛼
2
𝜋
cos 𝛼
1
tg ( + 𝛼) = −
=−
2
sin 𝛼
tg 𝛼
8
3.3 Le equazioni goniometriche
3.3.1 Le equazioni goniometriche elementari
sin 𝑥 = costante
cos 𝑥 = costante
tg 𝑥 = costante
Relazioni principali da utilizzare nella risoluzione delle equazioni goniometriche elementari:
sin 𝑥 = sin(𝜋 − 𝑥)
cos 𝑥 = cos(−𝑥)
tg 𝑥 = tg(𝜋 + 𝑥)
𝒔𝒊𝒏 𝒙 = 𝒄𝒐𝒔𝒕𝒂𝒏𝒕𝒆
si ricerca la soluzione nel 1° e 4° quadrante (in cui i valori del seno variano tra -1 e 1, cioè assumono tutti i
valori possibili). Poi si applica la relazione:
sin 𝑥 = sin(𝜋 − 𝑥)
e si trova una seconda soluzione.
Infine a entrambe le soluzioni si aggiunge il periodo del seno (2𝑘𝜋).
𝒄𝒐𝒔 𝒙 = 𝒄𝒐𝒔𝒕𝒂𝒏𝒕𝒆
si ricerca la soluzione nel 1° e 2° quadrante (in cui i valori del coseno variano tra -1 e 1, cioè assumono tutti i
valori possibili). Poi si applica la relazione:
𝑐𝑜𝑠 𝑥 = 𝑐𝑜𝑠(−𝑥)
e si trova una seconda soluzione.
Infine a entrambe le soluzioni si aggiunge il periodo del coseno (2𝑘𝜋).
𝐭𝐠 𝒙 = 𝐜𝐨𝐬𝐭𝐚𝐧𝐭𝐞
si ricerca la soluzione nel 1° e 4° quadrante (in cui i valori della tangente variano tra −∞ e +∞, cioè
assumono tutti i valori possibili).
Infine alla soluzione si aggiunge il periodo della tangente (𝑘𝜋).
3.3.2 Equazioni goniometriche algebriche
sin 𝑥
𝑓(𝑥) = {cos 𝑥 ⇒ 𝑎[𝑓(𝑥)]2 + 𝑏𝑓(𝑥) + 𝑐 = 0
tg 𝑥
Si risolvono con la sostituzione 𝑓(𝑥) = 𝑡 ricavando una equazione di secondo grado che ha, in generale, 2
soluzioni; da ciascuna di queste si ottiene una equazione goniometrica elementare.
3.3.3 Equazioni goniometriche lineari in 𝑠𝑖𝑛 𝑥 , 𝑐𝑜𝑠 𝑥
𝑎 𝑠𝑖𝑛 𝑥 + 𝑏 𝑐𝑜𝑠 𝑥 + 𝑐 = 0
Si risolvono mettendo a sistema l’equazione con la relazione goniometrica fondamentale: in pratica,
ricavando sin 𝑥 rispetto a cos 𝑥 (o viceversa), elevando al quadrato e sostituendo nella relazione
fondamentale: sin2 𝑥 + cos 2 𝑥 = 1 si ottiene una equazione goniometrica algebrica. Alla fine è necessario
verificare ciascuna soluzione (senza periodicità) sostituendola nella equazione di partenza.
Nel caso il termine noto sia nullo:
𝑎 𝑠𝑖𝑛 𝑥 + 𝑏 𝑐𝑜𝑠 𝑥 = 0 (𝑐𝑜𝑛 𝑐 = 0)
La soluzione si ottiene dividendo entrambi i membri per cos 𝑥 ottenendo una equazione elementare in tg 𝑥.
3.3.4 Equazioni goniometriche di secondo grado omogenee in 𝑠𝑖𝑛 𝑥 , 𝑐𝑜𝑠 𝑥
𝑎 𝑠𝑖𝑛2 𝑥 + 𝑏 𝑠𝑖𝑛 𝑥 𝑐𝑜𝑠 𝑥 + 𝑐 𝑐𝑜𝑠 2 𝑥 = 0
9
Si risolve dividendo entrambi i membri per cos2 𝑥 e ottenendo una equazione goniometrica algebrica in tg 𝑥.
Occorre discutere il caso: 𝑐𝑜𝑠 𝑥 = 0.
Si possono presentare anche i seguenti casi particolari:
𝑎 𝑠𝑖𝑛2 𝑥 + 𝑐 𝑐𝑜𝑠 2 𝑥 = 0 (𝑐𝑜𝑛 𝑏 = 0)
Si risolve ugualmente dividendo entrambi i membri per cos 2 𝑥 e ottenendo una equazione goniometrica
algebrica in tg 𝑥.
𝑏 𝑠𝑖𝑛 𝑥 𝑐𝑜𝑠 𝑥 + 𝑐 𝑐𝑜𝑠 2 𝑥 = 0 oppure 𝑎 𝑠𝑖𝑛2 𝑥 + 𝑏 𝑠𝑖𝑛 𝑥 𝑐𝑜𝑠 𝑥 = 0 (𝑐𝑜𝑛 𝑎 𝑜𝑝𝑝𝑢𝑟𝑒 𝑐 = 0)
Si risolvono mediante una scomposizione in fattori (si raccoglie nella prima cos 𝑥 e nella seconda sin 𝑥).
3.3.5 Equazioni goniometriche di secondo grado in 𝑠𝑖𝑛 𝑥 , 𝑐𝑜𝑠 𝑥
𝑎 𝑠𝑖𝑛2 𝑥 + 𝑏 𝑠𝑖𝑛 𝑥 𝑐𝑜𝑠 𝑥 + 𝑐 𝑐𝑜𝑠 2 𝑥 = 𝑑
Usando la relazione fondamentale: sin2 𝑥 + cos2 𝑥 = 1 si ottiene:
𝑎 sin2 𝑥 + 𝑏 sin 𝑥 cos 𝑥 + 𝑐 cos2 𝑥 = 𝑑(sin2 𝑥 + cos2 𝑥) ⇒
⇒ (𝑎 − 𝑑) sin2 𝑥 + 𝑏 sin 𝑥 cos 𝑥 + (𝑐 − 𝑑) cos2 𝑥 = 0
ottenendo una equazione goniometrica omogenea di secondo grado.
3.4 Le formule goniometriche
3.4.1 Le formule di addizione e sottrazione
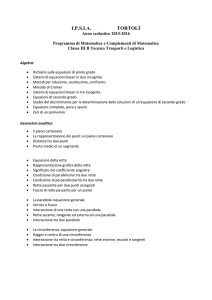
̅̅̅̅ ⊥ ̅̅̅̅
Con riferimento alla figura 2, sia 𝐵𝐾
𝑂𝐴; si ha che l’angolo 𝑄𝐵̂ 𝐾 vale α in quanto è dato dalla differenza
dell’angolo 𝑂𝐵̂ 𝐾 che vale:
𝜋
𝜋
𝑂𝐵̂ 𝐾 = 𝜋 − − 𝛽 = − 𝛽
2
2
̂
e l’angolo 𝑂𝐵 𝑃 che vale:
𝜋
𝜋
𝑂𝐵̂ 𝑃 = 𝜋 − − (𝛼 − 𝛽) = − 𝛼 − 𝛽
2
2
Si ha poi:
̅̅̅̅ ̅̅̅̅
̅̅̅̅ ̅̅̅̅̅
̅̅̅̅
𝐵𝑃 𝐵𝑄
𝑄𝑃 𝐵𝑄
𝐾𝑁
=
+
=
+
𝑟
𝑟
𝑟
𝑟
𝑟
̅̅̅̅
̅̅̅̅
𝑂𝑃 ̅̅̅̅
𝑂𝑁 ̅̅̅̅
𝑃𝑁 ̅̅̅̅
𝑂𝑁 𝑄𝐾
cos(𝛼 + 𝛽) =
=
−
=
−
𝑟
𝑟
𝑟
𝑟
𝑟
̅̅̅̅
𝐵𝐾
sin 𝛽 =
𝑟
̅̅̅̅
𝑂𝐾
cos 𝛽 =
𝑟
sin(𝛼 + 𝛽) =
Figura 2
Inoltre, considerando il triangolo rettangolo 𝐵𝐾𝑄 si ha:
̅̅̅̅
̅̅̅̅ 𝐵𝑄
̅̅̅̅
̅̅̅̅
𝐵𝑄
𝐵𝐾
𝐵𝑄
̅̅̅̅ ⇒
̅̅̅̅ cos 𝛼 = 𝐵𝑄
cos 𝛼 =
⇒ 𝐵𝐾
cos 𝛼 =
⇒
= sin 𝛽 cos 𝛼
̅̅̅̅
𝑟
𝑟
𝑟
𝐵𝐾
Invece, considerando il triangolo rettangolo 𝑂𝐾𝑁 si ha:
̅̅̅̅
̅̅̅̅̅
̅̅̅̅̅ 𝐾𝑁
̅̅̅̅̅
𝐾𝑁
𝑂𝐾
𝐾𝑁
̅̅̅̅ sin 𝛼 = ̅̅̅̅̅
sin 𝛼 =
⇒ 𝑂𝐾
𝐾𝑁 ⇒
sin 𝛼 =
⇒
= sin 𝛼 cos 𝛽
̅̅̅̅
𝑟
𝑟
𝑟
𝑂𝐾
In definitiva si ha la formula di addizione del seno:
𝐬𝐢𝐧(𝜶 + 𝜷) = 𝐬𝐢𝐧 𝜶 𝐜𝐨𝐬 𝜷 + 𝐜𝐨𝐬 𝜶 𝐬𝐢𝐧 𝜷
10
Oltre a questo, considerando il triangolo rettangolo 𝑂𝐾𝑁 si ha:
̅̅̅̅
̅̅̅̅
̅̅̅̅
𝑂𝑁
𝑂𝐾
𝑂𝑁 ̅̅̅̅
𝑂𝑁
̅̅̅̅ cos 𝛼 = 𝑂𝑁
̅̅̅̅ ⇒
cos 𝛼 =
⇒ 𝑂𝐾
cos 𝛼 =
⇒
= cos 𝛽 cos 𝛼
̅̅̅̅
𝑟
𝑟
𝑟
𝑂𝐾
Invece, considerando il triangolo rettangolo 𝐵𝐾𝑄 si ha:
̅̅̅̅
̅̅̅̅ 𝑄𝐾
̅̅̅̅
̅̅̅̅
𝑄𝐾
𝐵𝐾
𝑄𝐾
̅̅̅̅ ⇒
̅̅̅̅ sin 𝛼 = 𝑄𝐾
sin 𝛼 =
⇒ 𝐵𝐾
sin 𝛼 =
⇒
= sin 𝛼 sin 𝛽
̅̅̅̅
𝑟
𝑟
𝑟
𝐵𝐾
Infine si ha la formula di addizione del coseno:
𝐜𝐨𝐬(𝜶 + 𝜷) = 𝐜𝐨𝐬 𝜶 𝐜𝐨𝐬 𝜷 − 𝐬𝐢𝐧 𝜶 𝐬𝐢𝐧 𝜷
Per quanto riguarda la tangente, si avrà per angoli 𝛼 e 𝛽 diversi da
π
2
:
sin 𝛼 cos 𝛽 + sin 𝛽 cos 𝛼
sin(𝛼 + 𝛽) sin 𝛼 cos 𝛽 + sin 𝛽 cos 𝛼
cos 𝛼 cos 𝛽
tg(𝛼 + 𝛽) =
=
=
cos(𝛼 + 𝛽) cos 𝛼 cos 𝛽 − sin 𝛼 sin 𝛽 cos 𝛼 cos 𝛽 − sin 𝛼 sin 𝛽
cos 𝛼 cos 𝛽
Da questa si ottiene la formula di addizione della tangente:
𝐭𝐠 𝜶 + 𝐭𝐠 𝜷
𝐭𝐠(𝜶 + 𝜷) =
𝟏 − 𝐭𝐠 𝜶 ∙ 𝐭𝐠 𝜷
Dalle precedenti formule si ricavano le formule di sottrazione; per esempio, si avrà:
sin(𝛼 − 𝛽) = sin 𝛼 cos(−𝛽) + sin(−𝛽) cos 𝛼
Quindi si ottiene la formula di sottrazione del seno:
𝐬𝐢𝐧(𝜶 − 𝜷) = 𝐬𝐢𝐧 𝜶 𝐜𝐨𝐬 𝜷 − 𝐜𝐨𝐬 𝜶 𝐬𝐢𝐧 𝜷
Per il coseno si avrà:
cos(𝛼 − 𝛽) = cos 𝛼 cos(−𝛽) − sin 𝛼 sin(−𝛽)
E si ottiene la formula di sottrazione del coseno:
𝐜𝐨𝐬(𝜶 − 𝜷) = 𝐜𝐨𝐬 𝜶 𝐜𝐨𝐬 𝜷 + 𝐬𝐢𝐧 𝜶 𝐬𝐢𝐧 𝜷
Infine, per la tangente:
tg 𝛼 + tg(−𝛽)
1 − tg 𝛼 ∙ tg(−𝛽)
Da questa si ottiene la formula di sottrazione della tangente:
𝐭𝐠 𝜶 − 𝐭𝐠 𝜷
𝐭𝐠(𝜶 − 𝜷) =
𝟏 + 𝐭𝐠 𝜶 ∙ 𝐭𝐠 𝜷
tg(𝛼 − 𝛽) =
3.4.2 Le formule di duplicazione e bisezione
Avendo ottenuto delle relazioni che legano le funzioni goniometriche di somme di angoli alle funzioni dei
singoli angoli, è facile ottenere relazioni relative alle funzioni goniometriche del doppio (o della metà) di
angoli dati.
Infatti, ponendo 𝛼 = 𝛽 nelle precedenti formule di addizione, si ottiene:
sin(𝛼 + 𝛼) = sin 𝛼 cos 𝛼 + cos 𝛼 sin 𝛼
cos(𝛼 + 𝛼) = cos 𝛼 cos 𝛼 − sin 𝛼 sin 𝛼
tg 𝛼 + tg 𝛼
tg(𝛼 + 𝛼) =
1 − tg 𝛼 ∙ tg 𝛼
11
Queste diventano le formule di duplicazione di seno, coseno e tangente:
𝐬𝐢𝐧 𝟐𝜶 = 𝟐 𝐬𝐢𝐧 𝜶 𝐜𝐨𝐬 𝜶
𝐜𝐨𝐬 𝟐𝜶 = 𝐜𝐨𝐬𝟐 𝜶 − 𝐬𝐢𝐧𝟐 𝜶 = 𝟏 − 𝟐𝐬𝐢𝐧𝟐 𝜶 = 𝟐𝐜𝐨𝐬𝟐 𝜶 − 𝟏
𝐭𝐠 𝟐𝜶 =
𝟐 𝐭𝐠 𝜶
𝟏 − 𝐭𝐠 𝟐 𝜶
Si osservi che nella duplicazione del coseno si ottengono due ulteriori formulazioni utilizzando la relazione
fondamentale goniometrica. Da queste espressioni si ricavano le formule di bisezione; infatti possiamo
riferire la formula di duplicazione del coseno ad un angolo 𝛼 anziché 2𝛼 :
𝛼
𝛼
cos 𝛼 = 1 − 2sin2 = 2cos 2 − 1
2
2
Da queste si ricavano le formule di bisezione di seno e coseno:
𝐬𝐢𝐧
𝜶
𝟏 − 𝐜𝐨𝐬 𝜶
= ±√
𝟐
𝟐
𝐜𝐨𝐬
𝜶
𝟏 + 𝐜𝐨𝐬 𝜶
= ±√
𝟐
𝟐
Dividendo le precedenti si ottiene la formula di bisezione della tangente:
𝐭𝐠
𝜶
𝟏 − 𝐜𝐨𝐬 𝜶
= ±√
𝟐
𝟏 + 𝐜𝐨𝐬 𝜶
E’ importante notare che dei due segni che precedono la radice nelle precedenti formule solo uno è valido, e
per decidere qual è si deve conoscere il quadrante in cui cade il secondo lato dell’angolo considerato.
12
4 Introduzione alla geometria analitica
4.1 Il piano cartesiano
Se ℝ è l'insieme di tutti i numeri reali (rappresentabile su una retta), allora ℝ × ℝ = ℝ2 rappresenta il
piano euclideo; infatti ciascun punto di un piano può essere visto come una coppia ordinata (𝑎, 𝑏) formata
da due elementi dei quali uno è la prima coordinata e l'altro la seconda coordinata. Se disponiamo i valori
di ℝ lungo due rette perpendicolari che si intersecano in un punto (detto origine) coincidente con il valore
zero, otteniamo un piano cartesiano chiamando asse delle ascisse la retta 𝑥 e asse delle ordinate la retta 𝑦.
4.1.1 Distanza tra due punti
Dati due punti 𝐴 ≡ (𝑥1 , 𝑦1 ) e 𝐵 ≡ (𝑥2 , 𝑦2 ), la loro distanza (pari alla lunghezza del segmento ̅̅̅̅
𝐴𝐵) può
essere calcolata come l’ipotenusa del triangolo rettangolo che ha per cateti 𝑥2 − 𝑥1 e 𝑦2 − 𝑦1 :
̅̅̅̅
𝐴𝐵 = √(𝑥2 − 𝑥1 )2 + (𝑦2 − 𝑦1 )2
4.1.2 Punto medio di un segmento (baricentro)
Dato un segmento di estremi 𝐴 ≡ (𝑥1 , 𝑦1 ) e 𝐵 ≡ (𝑥2 , 𝑦2 ), il suo punto medio 𝑀 ≡ (𝑥𝑀 , 𝑦𝑀 ) avrà
coordinate:
𝑥2 − 𝑥1 2𝑥1 + 𝑥2 − 𝑥1 𝑥2 + 𝑥1
=
=
2
2
2
𝑦2 − 𝑦1 2𝑦1 + 𝑦2 − 𝑦1 𝑦2 + 𝑦1
𝑦𝑀 = 𝑦1 +
=
=
2
2
2
𝑥𝑀 = 𝑥1 +
In pratica le coordinate del punto medio (o baricentro) del segmento sono la media delle coordinate degli
estremi; questo vale per il baricentro di ogni altro poligono. Ad esempio, per il triangolo di vertici 𝐴 ≡
(𝑥1 , 𝑦1 ), 𝐵 ≡ (𝑥2 , 𝑦2 ) e 𝐶 ≡ (𝑥3 , 𝑦3 ) le coordinate del baricentro (punto d’incontro delle mediane)
sono:
𝑥1 + 𝑥2 + 𝑥3
3
𝑦1 + 𝑦2 + 𝑦3
𝑦𝑀 =
3
𝑥𝑀 =
4.2 La retta
Abbiamo già visto che se il rapporto tra il valore di una funzione 𝑓(𝑥) = 𝑦 e la sua variabile è costante per
ogni valore del dominio 𝐴 si dice che sono legate da una proporzionalità diretta:
𝑓(𝑥) 𝑦
= =𝑚
𝑥
𝑥
∀𝑥 ∈ 𝐴, 𝑥 ≠ 0
Ciò ovviamente significa:
𝑦 = 𝑓(𝑥) = 𝑚𝑥
∀𝑥 ∈ 𝐴
Il grafico che si ottiene da questa relazione è quello di una retta passante per l'origine degli assi cartesiani.
L'inclinazione della retta dipende dal numero 𝑚, che si chiama coefficiente angolare.
Se confrontiamo il grafico della funzione 𝑓(𝑥) = 𝑚𝑥 con quello della funzione lineare (di cui la
precedente è un caso particolare):
𝑓(𝑥) = 𝑚𝑥 + 𝑞
13
si vede che è identico salvo essere spostato verso l'alto o verso il basso (in dipendenza dal segno di 𝑞); essa
rappresenta una retta che non passa per l'origine tranne nel caso 𝑞 = 0. Il valore del termine noto 𝑞
rappresenta infatti il valore assunto dalla funzione per 𝑥 = 0:
𝑓(0) = 𝑞
La relazione che esprime la funzione lineare può essere espressa anche in quella che viene chiamata forma
implicita:
𝑎𝑥 + 𝑏𝑦 + 𝑐 = 0
dalla quale si passa alla forma esplicita così:
𝑎
𝑐
𝑎𝑥 + 𝑏𝑦 + 𝑐 = 0 ⟹ 𝑦 = − 𝑥 −
𝑏
𝑏
Si noti che la forma esplicita (in quanto funzione) non permette di descrivere rette in cui 𝑏 = 0, cioè
parallele all’asse delle ordinate, del tipo:
𝑥 = 𝑐𝑜𝑠𝑡𝑎𝑛𝑡𝑒
Si ponga infine attenzione al fatto che abbiamo scritto l’equazione della retta in due forme, esplicita ed
implicita, che contengono apparentemente un numero diverso di parametri: nella forma esplicita i
parametri 𝑚 e 𝑞; nella forma implicita i parametri 𝑎, 𝑏 e 𝑐 . In realtà i parametri della forma esplicita
(che è univoca) sono indipendenti ed hanno un preciso significato geometrico, rappresentando i gradi
di libertà della retta su un piano (che ha possibilità di compiere due tipi di spostamenti rigidi:
rotazione e traslazione); i parametri della forma esplicita invece non danno luogo ad una espressione
univoca: basti notare che moltiplicando entrambi i membri per un valore non nullo si ottiene
un’equazione della retta del tutto equivalente ed ancora in forma implicita.
4.2.1 Fascio proprio di rette
Sappiamo che esistono infinite rette passanti per un dato punto 𝐴 ≡ (𝑥1 , 𝑦1 ); questo insieme di rette (che
coprono l’intero piano) viene definito fascio proprio di rette, in cui il termine noto può essere esplicitato:
𝑦1 = 𝑚𝑥1 + 𝑞 ⟹ 𝑞 = 𝑦1 − 𝑚𝑥1
Quindi il fascio proprio di rette passanti per 𝐴 ≡ (𝑥1 , 𝑦1 ) sarà:
𝑦 = 𝑚𝑥 + 𝑦1 − 𝑚𝑥1 ⟹ 𝑦 − 𝑦1 = 𝑚(𝑥 − 𝑥1 )
4.2.2 Retta passante per due punti e significato geometrico del coefficiente angolare
Sappiamo che solo una retta passa per due punti 𝐴 ≡ (𝑥1 , 𝑦1 ) e 𝐵 ≡ (𝑥2 , 𝑦2 ); per individuarla
imponiamo alle rette del fascio passante per 𝐴 di passare anche per 𝐵 in modo da determinare il coefficiente
angolare:
𝑦2 − 𝑦1
𝑥2 − 𝑥1
Sostituendo tale coefficiente angolare nell’equazione del fascio passante per 𝐴 si ottiene l’equazione della
retta passante per 𝐴 e 𝐵 :
𝑦2 − 𝑦1
(𝑥 − 𝑥1 )
𝑦 − 𝑦1 =
𝑥2 − 𝑥1
Ora possiamo fare alcune valutazioni sul coefficiente angolare di una retta 𝑦 = 𝑚𝑥 + 𝑞 qualsiasi: presi a
caso su di essa due punti 𝐴 ≡ (𝑥1 , 𝑦1 ) e 𝐵 ≡ (𝑥2 , 𝑦2 ) si ha che il rapporto fra le differenze delle loro
𝑦2 − 𝑦1 = 𝑚(𝑥2 − 𝑥1 ) ⟹ 𝑚 =
coordinate deve coincidere con il suo coefficiente angolare:
14
𝑚=
𝑦2 − 𝑦1
𝑥2 − 𝑥1
Questo fatto indica che il valore del coefficiente angolare è in relazione con l’angolo di incidenza della retta
rispetto all’asse delle ascisse (o a qualunque sua parallela).
4.2.3 Parallelismo e fascio improprio di rette
La condizione per cui due rette siano parallele può essere vista nel fatto che abbiano uguale angolo di
incidenza rispetto all’asse delle ascisse; in definitiva, per quanto visto precedentemente, si ha che una
condizione necessaria e sufficiente perché due rette siano parallele è che abbiamo lo stesso coefficiente
angolare. Nel caso che anche il termine noto sia identico, allora le due rette si dicono coincidenti.
L’insieme di tutte le rette del piano parallele ad una retta data (cioè tutte le rette che hanno coefficiente
angolare uguale a quello della retta data) formano un fascio improprio di rette. Se l’equazione della retta 𝑟
data è:
𝑦 = 𝑚𝑟 𝑥 + 𝑞𝑟
allora l’equazione del fascio improprio è semplicemente:
𝑦 = 𝑚𝑟 𝑥 + 𝑞
4.2.4 Perpendicolarità
Siano 𝑟 una generica retta e 𝑠 una retta ad essa perpendicolare; senza perdere generalità, possiamo
individuare un riferimento cartesiano con origine 𝑂 nel punto d’intersezione tra le due rette. In questo
sistema l’equazione della retta 𝑟 sarà 𝑦 = 𝑚𝑟 𝑥 e quella della retta 𝑠 sarà 𝑦 = 𝑚𝑠 𝑥 . Vogliamo scoprire
qual è la relazione tra i coefficienti angolari di due rette parallele; a tal fine possiamo individuare su 𝑟 il
punto 𝐴 ≡ (𝑥𝑟 , 𝑦𝑟 ) e su 𝑠 il punto 𝐵 ≡ (𝑥𝑠 , 𝑦𝑠 ) tali che sia uguale la loro distanza dall’origine. Chiamati
𝐶 ≡ (𝑥𝑟 , 0) e 𝐷 ≡ (𝑥𝑠 , 0) le proiezioni di 𝐴 e 𝐵 sull’asse delle ascisse, si ha che:
̅̅̅̅
𝐴𝐶
𝑚𝑟 =
̅̅̅̅
𝑂𝐶
̅̅̅̅
𝐵𝐷
𝑚𝑠 = −
̅̅̅̅
𝑂𝐷
Inoltre i triangoli 𝐴𝑂𝐶 e 𝐵𝑂𝐷 sono congruenti per il secondo criterio di congruenza dei triangoli; in
̅̅̅̅ = 𝑂𝐷
̅̅̅̅ e 𝐵𝐷
̅̅̅̅ = ̅̅̅̅
particolare 𝐴𝐶
𝑂𝐶 . Quindi:
̅̅̅̅
̅̅̅̅
𝐵𝐷
𝑂𝐶
1
𝑚𝑠 = −
=−
=−
̅̅̅̅
̅̅̅̅
𝑚𝑟
𝑂𝐷
𝐴𝐶
che rappresenta il criterio di perpendicolarità tra due rette: due rette sono perpendicolari se e solo se il
coefficiente angolare di una è l’opposto del reciproco del coefficiente angolare dell’altra.
4.2.5 Ricerca dell’equazione di determinate rette
Poiché una retta su un piano ha due gradi di libertà rappresentati da coefficiente angolare e termine noto, la
ricerca dell’equazione di una certa retta si riduce a tentare di determinare il valore di questi due parametri. E’
ovvio che per tale ricerca sono necessarie e sufficienti due informazioni indipendenti sulla retta da
individuare, ad esempio due suoi punti interni, oppure un punto interno ed una retta ad essa parallela o
perpendicolare:
Retta passante per due punti 𝐴 ≡ (𝑥1 , 𝑦1 ) e 𝐵 ≡ (𝑥2 , 𝑦2 ):
15
𝑦2 − 𝑦1
(𝑥 − 𝑥1 )
𝑥2 − 𝑥1
Retta passante per un punto 𝐴 ≡ (𝑥1 , 𝑦1 ) e parallela alla retta 𝑦 = 𝑚𝑟 𝑥 + 𝑞𝑟 :
𝑦 − 𝑦1 = 𝑚𝑟 (𝑥 − 𝑥1 )
Retta passante per un punto 𝐴 ≡ (𝑥1 , 𝑦1 ) e perpendicolare alla retta 𝑦 = 𝑚𝑟 𝑥 + 𝑞𝑟 :
1
(𝑥 − 𝑥1 )
𝑦 − 𝑦1 = −
𝑚𝑟
𝑦 − 𝑦1 =
4.2.6 Posizione reciproca di due rette
Due rette complanari con lo stesso coefficiente angolare possono essere semplicemente parallele, se non
hanno punti comuni; oppure coincidenti se hanno tutti i punti in comune. In entrambi i casi è
immediatamente evidente quali siano i punti comuni. Se invece i coefficienti angolari sono diversi, le due
rette sono incidenti, vale a dire hanno un unico punto comune detto intersezione.
Come abbiamo già visto nel capitolo dedicato ai sistemi lineari, per trovare il punto d’intersezione di due
rette incidenti si deve risolvere il sistema (sicuramente determinato!) formato dalle equazioni delle due rette,
trovando così l’unico punto le cui coordinate soddisfano contemporaneamente entrambe le equazioni.
4.2.7 Distanza di un punto da una retta
Ricavare la distanza di un punto 𝑃 da una retta 𝑟 (ovviamente, con 𝑃 ∉ 𝑟 ) è un esercizio facilmente
risolubile scrivendo l’equazione della retta 𝑠 perpendicolare a 𝑟 e passante per 𝑃; si calcola poi la distanza
tra 𝑃 e l’intersezione di 𝑟 e 𝑠.
In alternativa si può dimostrare che la distanza 𝑑(𝑟, 𝑃) del punto 𝑃 ≡ (𝑥0 , 𝑦0 ) dalla retta 𝑟 di equazione
𝑎𝑥 + 𝑏𝑦 + 𝑐 = 0 è data da:
|𝑎𝑥0 + 𝑏𝑦0 + 𝑐|
𝑑(𝑟, 𝑃) =
√𝑎2 + 𝑏 2
4.3 La parabola
Una parabola può essere definita come il luogo geometrico dei punti del piano equidistanti da una retta detta
direttrice 𝑦 = 𝑑 e da un punto detto fuoco (esterno alla retta) 𝐹 ≡ (𝑥0 , 𝑦0 ). Cerchiamo di dimostrare che,
scegliendo un sistema di riferimento con asse delle ascisse parallelo alla direttrice, l’equazione della
parabola è del tipo: 𝑦 = 𝑎𝑥 2 + 𝑏𝑥 + 𝑐 .
Facendo riferimento alla figura 14.1, si deve avere:
̅̅̅̅ ⟹ √(𝑥 − 𝑥0 )2 + (𝑦 − 𝑦0 )2 = 𝑦 − 𝑑
̅̅̅̅ = 𝑃𝐴
𝐹𝑃
Elevando tutto al quadrato e sviluppando i calcoli:
𝑥 2 − 2𝑥0 𝑥 + 𝑥02 + 𝑦 2 − 2𝑦0 𝑦 + 𝑦02 = 𝑦 2 − 2𝑑𝑦 + 𝑑 2 ⟹
⟹ 𝑦 ∙ 2(𝑦0 − 𝑑) = 𝑥 2 − 2𝑥0 𝑥 + 𝑥02 + 𝑦02 − 𝑑 2 ⟹
1
−𝑥0
𝑥02 + 𝑦02 − 𝑑 2
2
⟹𝑦=[
]𝑥 + [
]𝑥 + [
] = 𝑎𝑥 2 + 𝑏𝑥 + 𝑐
2(𝑦0 − 𝑑)
𝑦0 − 𝑑
2(𝑦0 − 𝑑)
Figura 14.1
16
4.3.1 Vertice, fuoco e direttrice della parabola
Per evidenziare le relazioni tra i coefficienti 𝑎, 𝑏 e 𝑐 della parabola e le coordinate di vertice e fuoco si nota
in primo luogo che l’ascissa di questi ultimi è evidentemente la stessa, cioè 𝑥𝑜 . E’ immediato verificare che:
−𝑥0
−𝑥0
[
]
𝑏
−𝑥0 𝑦0 − 𝑑
𝑦0 − 𝑑
𝑦 −𝑑
−
=−
=− 0
=−
∙
= 𝑥0
1
1
2𝑎
𝑦
−
𝑑
1
0
2[
]
𝑦0 − 𝑑
2(𝑦0 − 𝑑)
Avendo l’ascissa del vertice, l’ordinata si trova mediante sostituzione nell’equazione della parabola:
𝑏 2
𝑏
𝑏2 𝑏2
𝑏2
1
𝑦 = 𝑎 (− ) + 𝑏 (− ) + 𝑐 =
−
+𝑐 =−
+ 𝑐 = − (𝑏2 − 4𝑎𝑐) ⟹
2𝑎
2𝑎
4𝑎 2𝑎
4𝑎
4𝑎
∆
⟹𝑦=−
4𝑎
𝑏
Per quanto riguarda il fuoco 𝐹 ≡ (− , 𝑦0 ) e la retta direttrice 𝑦 = 𝑑 , si ha che:
2𝑎
−
∆
𝑦0 + 𝑑
∆
=
⟹ 𝑦0 + 𝑑 = −
4𝑎
2
2𝑎
e contemporaneamente:
𝑎=
1
1
⟹ 𝑦0 − 𝑑 =
2(𝑦0 − 𝑑)
2𝑎
Quindi:
∆
1
∆
1
∆
2𝑦0 =
−
𝑦0 =
−
2𝑎 ⟹
2𝑎 2𝑎 ⟹
4𝑎 4𝑎
1
1
∆
1
∆
{ 𝑦0 − 𝑑 = 2𝑎
{2𝑑 = − 2𝑎 − 2𝑎
{𝑑 = − 4𝑎 − 4𝑎
𝑦0 + 𝑑 = −
In definitiva per vertice, fuoco e direttrice si ha che:
𝑉 ≡ (−
𝑏
∆
,− )
2𝑎 4𝑎
17
𝑏 1
∆
,
− )
2𝑎 4𝑎 4𝑎
1
∆
𝑦=−
−
4𝑎 4𝑎
𝐹 ≡ (−
4.4 Retta e parabola
Se si vogliono conoscere eventuali punti comuni (intersezioni) tra una retta ed una parabola, è sufficiente
risolvere il sistema tra le equazioni di retta e parabola ottenendo in generale una equazione al massimo di
secondo grado che, a seconda del valore del suo discriminante, potrà avere due soluzioni (nel caso di retta
secante, cioè ∆ positivo), oppure una soluzione (nel caso di retta tangente, cioè ∆ nullo), oppure nessuna
soluzione (nel caso di retta esterna, cioè ∆ negativo).
E’ possibile trovare l’equazione di rette tangenti ad una parabola e passanti per un dato punto, che può
appartenere alla parabola (allora si trova una sola soluzione) oppure essere esterno alla parabola (allora si
trovano due soluzioni) oppure essere interno alla parabola (allora non si trova nessuna soluzione). Si scrive
l’equazione del fascio di rette passante per il punto dato e poi si inizia a risolvere il sistema composto
dall’equazione del fascio e dall’equazione della parabola; appena si ottiene l’equazione risolutiva di secondo
grado in 𝑥 , si impone che il discriminante sia nullo e si ricava il corrispondente valore del coefficiente
angolare.
In generale, la ricerca delle equazioni di una retta e di una parabola tangenti si imposta (dopo aver sfruttato
tutte le informazioni per diminuire al massimo il numero di parametri) mediante la condizione per cui il
sistema tra retta e parabola abbia una sola soluzione reale:
{
𝑦 = 𝑚𝑥 + 𝑞
⟹ 𝑎𝑥2 + (𝑏 − 𝑚)𝑥 + (𝑐 − 𝑞) = 0
𝑦 = 𝑎𝑥2 + 𝑏𝑥 + 𝑐
Tale condizione è che il discriminante dell’equazione di secondo grado ricavata sia nullo:
∆= 0 ⟹ (𝑏 − 𝑚)2 − 4𝑎(𝑐 − 𝑞) = 0
4.5 La Circonferenza
Una circonferenza può essere definita come il luogo geometrico dei punti del piano equidistanti da un punto
detto centro 𝐶 ≡ (𝑥𝐶 , 𝑦𝐶 ). Cerchiamo di dimostrare che, in un sistema di riferimento cartesiano,
l’equazione della circonferenza è del tipo: 𝑥 2 + 𝑦 2 + 𝑎𝑥 + 𝑏𝑦 + 𝑐 = 0.
La distanza dei punti della circonferenza dal centro, chiamata raggio, sia pari a 𝑅 ; allora per ogni generico
punto 𝑃 ≡ (𝑥, 𝑦) appartenente alla circonferenza si deve avere:
̅̅̅̅
𝑃𝐶 2 = (𝑥 − 𝑥𝐶 )2 + (𝑦 − 𝑦𝐶 )2 = 𝑥 2 − 2𝑥𝐶 𝑥 + 𝑥𝐶2 + 𝑦 2 − 2𝑦𝐶 𝑦 + 𝑦𝐶2 = 𝑅2 ⟹
⟹ 𝑥 2 + 𝑦 2 + (−2𝑥𝐶 )𝑥 + (−2𝑦𝐶 )𝑦 + (𝑥𝐶2 + 𝑦𝐶2 − 𝑅2 ) = 0 ⟹
⟹ 𝑥 2 + 𝑦 2 + 𝑎𝑥 + 𝑏𝑦 + 𝑐 = 0
L’equazione quindi si ottiene ponendo 𝑎 = −2𝑥𝐶 , 𝑏 = −2𝑦𝐶 e 𝑐 = 𝑥𝐶2 + 𝑦𝐶2 − 𝑅 2 .
4.5.1 Centro e raggio della circonferenza
Per evidenziare le relazioni dei coefficienti 𝑎, 𝑏 e 𝑐 della circonferenza con il raggio e le coordinate del
centro si nota in primo luogo che queste ultime hanno valore:
𝑥𝑐 = −
𝑎
𝑏
; 𝑦𝑐 = −
2
2
Allo stesso modo si ricava il valore del raggio:
18
2
𝑅 =
𝑥𝐶2
+
𝑦𝐶2
−𝑐 ⟹𝑅 =
√𝑥𝐶2
+
𝑦𝐶2
𝑎2 𝑏 2
√
−𝑐 =
+ −𝑐
4
4
A questo punto è evidente che non tutte le equazioni del tipo 𝑥 2 + 𝑦 2 + 𝑎𝑥 + 𝑏𝑦 + 𝑐 = 0
rappresentano una circonferenza; perché questo accada è necessario che il raggio abbia valore positivo, per
cui occorre porre la condizione:
𝑎2 𝑏 2
+ −𝑐 >0
4
4
4.6 Retta e circonferenza
Se si vogliono conoscere eventuali punti comuni (intersezioni) tra una retta ed una circonferenza, è
sufficiente risolvere il sistema tra le equazioni di retta e circonferenza ottenendo in generale una equazione al
massimo di secondo grado che, a seconda del valore del suo discriminante, potrà avere due soluzioni (nel
caso di retta secante, cioè ∆ positivo), oppure una soluzione (nel caso di retta tangente, cioè ∆ nullo), oppure
nessuna soluzione (nel caso di retta esterna, cioè ∆ negativo).
E’ possibile trovare l’equazione di rette tangenti ad una circonferenza e passanti per un dato punto, che può
appartenere alla circonferenza (allora si trova una sola soluzione) oppure essere esterno alla circonferenza
(allora si trovano due soluzioni) oppure essere interno alla circonferenza (allora non si trova nessuna
soluzione). Si possono seguire diversi metodi per trovare una retta tangente alla circonferenza: si può
scrivere l’equazione del fascio di rette passante per il punto dato e poi si inizia a risolvere il sistema
composto dall’equazione del fascio e dall’equazione della parabola; appena si ottiene l’equazione risolutiva
di secondo grado in 𝑥 , si impone che il discriminante sia nullo e si ricava il corrispondente valore del
coefficiente angolare.
In pratica, la ricerca delle equazioni di una retta e di una circonferenza tangenti si imposta (dopo aver
sfruttato tutte le informazioni per diminuire al massimo il numero di parametri) mediante la condizione per
cui il sistema tra retta e circonferenza abbia una sola soluzione reale:
𝑦 = 𝑚𝑥 + 𝑞
{ 2
⟹ 𝑥2 + (𝑚𝑥 + 𝑞)2 + 𝑎𝑥 + 𝑏(𝑚𝑥 + 𝑞) + 𝑐 = 0
2
𝑥 + 𝑦 + 𝑎𝑥 + 𝑏𝑦 + 𝑐 = 0
Tale condizione è che il discriminante dell’equazione di secondo grado ricavata sia nullo.
In alternativa, si può procedere imponendo alla retta ed alla circonferenza che la distanza tra il centro e la
retta sia uguale al raggio (infatti il raggio che unisce un punto di tangenza al centro è sempre perpendicolare
alla retta tangente).
Infine, se il problema è trovare una retta tangente in un particolare punto della circonferenza, si può ricavare
il coefficiente angolare del segmento che ha per estremi il centro e il punto di tangenza e poi cercare
l’equazione della retta ad esso perpendicolare passante per il punto di tangenza.
19