UNIVERSITÀ DEGLI STUDI DI SIENA
Facoltà di Ingegneria
Esercitazioni di Elettronica II
Tommaso Addabbo - Valerio Vignoli
Ultima revisione: 6 dicembre 2005
c
Copyright 2005
TOMMASO ADDABBO - VALERIO VIGNOLI. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version
1.2 or any later version published by the Free Software Foundation. A copy of the license can be retrieved from http://www.gnu.org, or contact the Free Software Foundation, Inc., 51 Franklin St, Fifth
Floor, Boston, MA 02110-1301 USA.
1
Indice
1
2
Amplificatori operazionali in circuiti con retroazione negativa
1.1 Modello dell’amplificatore operazionale reale . . . . . . . .
1.1.1 Valori tipici . . . . . . . . . . . . . . . . . . . . . .
1.2 Principali effetti delle non idealità . . . . . . . . . . . . . .
1.2.1 Amplificatore non invertente . . . . . . . . . . . . .
1.2.2 Amplificatore invertente . . . . . . . . . . . . . . .
1.3 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Amplificatori operazionali in circuiti a retroazione positiva
2.1 Trigger di Schmitt . . . . . . . . . . . . . . . . . . . . .
2.2 Circuiti con retroazione positiva e negativa . . . . . . . .
2.3 Circuiti astabili . . . . . . . . . . . . . . . . . . . . . .
2.3.1 Generatori di onda quadra . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
4
4
5
5
6
.
.
.
.
13
13
15
20
20
3
Convertitori A/D e D/A
22
3.1 Acquisizione dei dati . . . . . . . . . . . . . . . . . . . . . . . . 23
4
Elettronica digitale
26
4.1 Invertitori n-MOS . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.2 Invertitori C-MOS . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2
Capitolo 1
Amplificatori operazionali in circuiti
con retroazione negativa
1.1
Modello dell’amplificatore operazionale reale
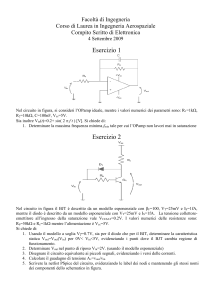
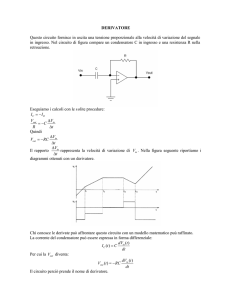
In questo documento si fa riferimento al modello semplificato dell’amplificatore
operazionale reale riprodotto in Fig. 1.1, dove
• VOS : tensione di offset [V ]
• IB1 , IB2 : correnti di polarizzazione [A]
• CM RR : Common Mode Rejection Ratio
• Rid : resistenza di ingresso differenziale [Ω]
• R0 : resistenza di uscita [Ω]
• Vcc , Vee : tensioni di alimentazione [V ]
Per l’operazionale si è inoltre assunto un comportamento a polo dominante per
cui
A0
A(ω) =
(1.1)
1 + j ωωB
dove ωB = 2πfB individua la pulsazione di taglio a −3dB. Ulteriori grandezze
definite sono
• GBW = A0 fB : prodotto guadagno-banda (Gain-Bandwidth) [Hz]. Coincide con la frequenza di transizione fT alla quale |A(2πfT )| ≈ 1
• SR : Slew-Rate [V/s]
• IOS = IB1 − IB2 : corrente di offset [A]
3
+
VOS
V+
V++V−
2CMRR
Vcc
IB1
Rid
A(ω)Vid
Vid
−
V−
R0
Vee
IB2
Figura 1.1: Modello semplificato dell’operazionale reale con le principali non
idealità.
1.1.1
Valori tipici
Negli amplificatori operazionali reali le quantità sopra introdotte possono variare
notevolmente. Nella tabella che segue sono riportati i valori tipici per alcuni dispositivi reali
VOS
Rid
R0
IB
IOS
A0
GBW
CM RR
SR
(Vcc − Vee )min
(Vcc − Vee )max
1.2
µA741
±1mV
1.5M Ω
75Ω
10nA
±2nA
106dB
1M Hz
90dB
0.5V /µs
8V
44V
T L081
±3mV
1012 Ω
200Ω
30pA
±5pA
106dB
3M Hz
86dB
13V /µs
8V
36V
LT C1051
±0.5µV
15pA
±30pA
130dB
2.5M Hz
130dB
4V /µs
5V
16V
Principali effetti delle non idealità
In riferimento ai valori tipici per le quantità sopra introdotte, sono riportati qui di
seguito alcuni dei principali effetti1 delle non idealità su alcuni circuiti esaminati
1
I risultati riportati sono approssimazioni ottenute attraverso opportune semplificazioni del
modello dell’operazionale reale di Fig. 1.1.
4
durante il corso. Nel seguito è posto β = R1 /(R1 + R2 ), con R1 , R2 = 102 Ω ÷
107 Ω.
1.2.1
Amplificatore non invertente
R2
Vin
Vout
R1
Zin
Zout
Figura 1.2: Amplificatore non invertente.
Posto
Vout
(ω)
Vin
(1.2)
A00
A(ω)
=
1 + βA(ω)
1 + j ωω0
(1.3)
A0 (ω) =
risulta
A0 (ω) ≈
B
dove
ωB0 = ωB (1 + βA0 )
e
A00 =
A0
1 + βA0
(1.4)
(1.5)
Inoltre
Rin (f = 0) ≈ Rid (1 + βA0 )
e
Rout (f = 0) ≈
1.2.2
R0
R0
//(R1 + R2 ) ≈
1 + βA0
1 + βA0
(1.6)
(1.7)
Amplificatore invertente
Posto
A0 (ω) =
5
Vout
(ω)
Vin
(1.8)
R2
R1
Vin
Vout
Zin
Zout
Figura 1.3: Amplificatore invertente.
risulta
A0 (ω) ≈
(β − 1)A(ω)
A00
=
1 + βA(ω)
1 + j ωω0
(1.9)
B
dove
ωB0 = ωB (1 + βA0 )
e
A00 =
(β − 1)A0
1 + βA0
Inoltre
Rin (f = 0) ≈ R1 +
e
Rout (f = 0) ≈
1.3
R2
//Rid ≈ R1
1 + A0
R0
R0
//(R1 + R2 ) ≈
1 + βA0
1 + βA0
(1.10)
(1.11)
(1.12)
(1.13)
Esercizi
Negli esercizi di questo capitolo, quando non altrimenti specificato, per gli amplificatori operazionali impiegati saranno assunte le seguenti caratteristiche R0 =
0Ω, Rid = ∞, CM RR = ∞, VOS = 0V, IB1 = IB2 = 0A, SR = ∞ e risposta in
frequenza a singolo polo (1.1).
Esercizio 1.3.1 L’amplificatore non invertente di Fig.1.2 presenta in continua
un guadagno reale di 40dB ed una resistenza di uscita di 0.1Ω. Calcolare il
guadagno in continua dell’amplificatore operazionale impiegato, assumendo che
R0 = 200Ω. Fornire un dimensionamento per R1 e R2 .
6
Soluzione. L’amplificatore non invertente in continua presenta un guadagno
A00 ≈
40
A0
= 10 20 = 100
1 + βA0
(1.14)
ed una resistenza di uscita pari a
Rout ≈
R0
= 0.1Ω
1 + βA0
(1.15)
Assumento R0 = 200Ω dalla precedente equazione si ottiene
1 + βA0 = 2000
(1.16)
Usando questo risultato nella (1.14) si ricava
A0 ≈ 2000 · 100 = 2 · 105
(1.17)
Pertanto dalla (1.16) si ottiene
β≈
2 · 103 − 1
R1
≈ 10−2 =
5
2 · 10
R1 + R2
(1.18)
da cui un possibile dimensionamento si ha ponendo R1 = 1kΩ e R2 = 99kΩ.
—————- ~ —————Esercizio 1.3.2 Si consideri per l’inseguitore di tensione di Fig. 1.4 un amplificatore operazionale con guadagno in continua di 80dB e frequenza di taglio a
−3dB di 20Hz. Calcolare l’errore commesso dall’inseguitore alla frequenza di
20kHz.
Vin
Vout
Figura 1.4: Inseguitore di tensione.
7
Soluzione. Impiegando un amplificatore operazionale ideale questo circuito ha
una funziona di trasferimento
Vout
(ω)
=1
(1.19)
Vin
ideale
L’unica non idealità da considerare è il guadagno finito e dipendente dalla frequenza (1.1). Sostituendo all’operazionale ideale il modello di Fig. 1.1 si ottiene
Vout
A(ω)
A0
(ω) =
=
Vin
1 + A(ω)
1 + A0 + j ωωB
(1.20)
80
Essendo A0 = 10 20 = 104 e ωB = 2π · 20 rad/s si ottiene
Vout
10
104
=
(2π · 20 · 103 ) ≈ 4
3
Vin
10 + j10
10 + j
(1.21)
da cui
Vout
10
3
Vin (2π · 20 · 10 ) ≈ √100 + 1 ≈ 0.995
L’errore commesso è dato dal FGE (Fractional Gain Error)
F GE|f =20kHz =
|Greale − Gideale |
= 0.005 = 0.5%
|Gideale |
(1.22)
(1.23)
—————- ~ —————Esercizio 1.3.3 Si realizzi un amplificatore di tensione con frequenza di taglio
fB0 ≥ 30kHz, e che presenti in continua Rin ≥ 1GΩ, Rout ≤ 0.5Ω e guadagno
Vout
= 400
(ω
=
0)
Vin
Per il progetto si utilizzi una cascata di uno o più stadi identici che impieghino un
amplificatore operazionale reale dalle seguenti caratteristiche
Rid = 800kΩ, R0 = 50Ω, A0 = 8 · 104 , fT = 1M Hz
Soluzione. Il progettista deve stabilire nell’ordine:
1. Il tipo di stadio da usare (amplificatore invertente o non invertente)
2. Il numero necessario di stadi
8
Al primo punto si trova facile risposta osservando che in una cascata di amplificatori invertenti o non invertenti la resistenza di ingresso e la resistenza di uscita della cascata di stadi è sostanzialmente definita dalla resistenza di ingresso del primo
stadio e dalla resistenza di uscita dell’ultimo stadio. Dalle specifiche di progetto,
l’elevata resistenza di ingresso richiesta deve indurre il progettista ad optare per
stadi amplificatori non invertenti (altrimenti, essendo in un amplificatore invertente Rin ≈ R1 si renderebbe necessario il vincolo poco realistico R1 ≥ 1GΩ).
La risposta al secondo punto è determinabile per tentativi, verificando se - partendo da un singolo stadio - è possibile soddisfare le specifiche del progetto.
Verifica per un singolo stadio
Considerando un amplificatore non invertente si ha
A00 ≈
A0
= 400
1 + βA0
(1.24)
da cui, essendo A0 = 8 · 104 , β ≈ 1/400. Impiegando l’operazionale proposto nel
singolo stadio si ottiene
Rin ≈ Rid (1 + βA0 ) = 8 · 105 (1 +
8 · 104
) ≈ 16 · 107 < 109 Ω
400
(1.25)
che non permette di soddisfare la condizione sulla resistenza di ingresso.
Verifica per una cascata di due stadi
Essendo richiesto l’utilizzo di stadi identici, il guadagno di ognuno di essi dovrà
essere tale da soddisfare
Vout
Vout
V
out
(ω = 0) =
(ω = 0) ·
(ω = 0) = 400
(1.26)
Vin
Vin
Vin
tot
1
2
da cui
√
Vout
Vout
(ω = 0) =
(ω = 0) = 400 = 20
Vin
Vin
1
2
(1.27)
Per ogni stadio quindi si ha
A00 ≈
A0
= 20
1 + βA0
(1.28)
da cui, essendo A0 = 8 · 104 , β ≈ 1/20. Impiegando l’operazionale proposto, la
resistenza di ingresso presentata dal primo stadio è
Rin ≈ Rid (1 + βA0 ) = 8 · 105 (1 +
9
8 · 104
) ≈ 3.2 · 109 > 109 Ω,
20
(1.29)
soddisfacendo la specifica sulla Rin . Per quanto riguarda la Rout presentata dal
secondo stadio (l’ultimo della cascata) si ha
Rout ≈
R0
50
−2
=
< 0.5Ω
4 ≈ 1.25 · 10
8·10
1 + βA0
1 + 20
(1.30)
soddisfacendo la specifica sulla Rout . Rimane da verificare che la frequenza di
taglio fB0 T OT dell’amplificatore determinato dalla cascata dei due stadi sia superiore a 30kHz. A tale scopo, la frequenza di taglio fB0 di ogni singolo stadio è pari
a
106
fT
(1 + βA0 ) ≈
= 50kHz
(1.31)
fB0 =
A0
20
In una cascata di N stadi identici, la frequenza di taglio a −3dB è data da
p
fBtot = fB0 21/N − 1
(1.32)
da cui, nel caso considerato per N = 2, si ha fB0 T OT ≈ 32kHz > 30kHz, che
soddisfa l’ultimo vincolo di progetto. Per completare l’esercizio, rimangono da
dimensionare R1 e R2 , per cui
R2
1
R1 = 10kΩ
=1+
= 20 ⇒
(1.33)
R2 = 190kΩ
β
R1
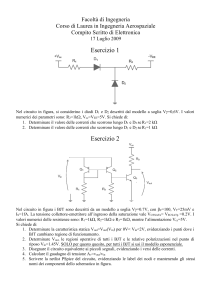
—————- ~ —————Esercizio 1.3.4 Nel circuito di Fig. 1.5 è impiegato un amplificatore operazionale
con guadagno ideale ma affetto da correnti di polarizzazione IB1 = IB2 = 1µA,
tensione di offset VOS = 4mV e slew rate SR = 4V /µs. Determinare il valore
di RK affinchè la componente in uscita legata alle non idealità introdotte sia
indipendente dal tempo. Assumendo in ingresso un gradino di tensione di 2V ,
determinare il valore limite della costante di tempo τ = RC compatibile con lo
slew rate dell’operazionale.
Soluzione. Sostituendo all’operazionale ideale il modello dell’operazionale reale
di Fig. 1.1 con le non idealità introdotte si ottiene il circuito di Fig. 1.6 da cui
Vx = VOS − IB RK
(1.34)
Facendo il bilancio delle correnti al nodo y si ottiene
Vin (t) − Vy (t)
= IB + IC (t)
R
dove
IC (t) = C
d
(Vy (t) − Vout (t))
dt
10
(1.35)
C
R
RK
Vin
Vout
Figura 1.5: Integratore compensato.
IB
R
IC
Vy
Vx
Vin
RK
C
opamp
ideale
Vout
VOS
IB
Figura 1.6: Modello circuitale per l’esercizio 1.3.4.
è la corrente istantanea che attraversa la capacità C. Essendo l’amplificatore operazionale nel circuito in analisi un operazionale ideale retroazionato negativamente,
vale il principio del cortocircuito virtuale ai suoi morsetti per cui Vy (t) = Vx =
costante da cui
IC (t) =
VOS − IB RK
d
Vin (t)
− IB −
= −C Vout (t)
R
R
dt
(1.36)
Affinché l’uscita non vari nel tempo a causa delle non idealità introdotte è necessario che
VOS − IB RK
IB +
=0
(1.37)
R
ovvero che RK = R + VOS /IB . In tal caso infatti si ottiene Vy = Vx = −IB R e
per l’uscita
Z t
Vin (θ)
Vout (t) = −IB R − VC (0) −
dθ
(1.38)
RC
0
11
Essendo lo slew rate dell’operazionale limitato, deve risultare
d
Vin (t) Vout (t)
=
≤ SR = 4 · 106 V /s
dt
CR
max
max
(1.39)
Assumendo in ingresso un gradino di ampiezza 2V deve essere
CR ≥
2
= 5 · 10−7 s
4 · 106
—————- ~ —————-
12
(1.40)
Capitolo 2
Amplificatori operazionali in circuiti
a retroazione positiva
Per la corretta risoluzione degli esercizi di questo capitolo, è bene ricordare che
nell’analisi dei circuiti con amplificatori operazionali con uscita in saturazione
NON è possibile applicare il principio del cortocircuito virtuale ai suoi morsetti.
Negli esercizi di questo capitolo, quando altrimenti non specificato, per gli amplificatori operazionali impegati saranno assunte le seguenti caratteristiche R0 =
0Ω, Rid = ∞, CM RR = ∞, VOS = 0V, IB1 = IB2 = 0A, SR = ∞. Inoltre,
gli amplificatori operazionali con uscita saturata sono supposti di tipo rail to rail e
con risposta V0 (Vid ) ideale riportata in Fig. 2.1.
VO
Vcc
Vid
VO
Vid
Vee
Figura 2.1: Guadagno ideale di un amplificatore operazionale con saturazione
2.1
Trigger di Schmitt
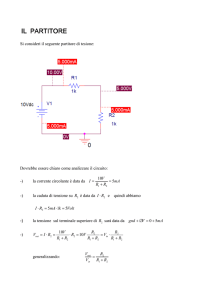
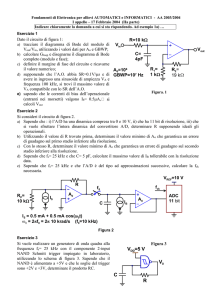
Esercizio 2.1.1 Si consideri il circuito in Fig. 2.2. Determinare l’andamento
della tensione di uscita in funzione di quella di ingresso, assumendo Vcc = 10V ,
R1 = 1kΩ e R2 = 3kΩ.
13
R2
R1
+Vcc
Vx
Vin
−Vcc
Vout
Figura 2.2: Trigger di Schmitt a logica positiva.
Soluzione. Una rapida analisi del circuito evidenzia come per Vin 6= 0 il sistema diverga (saturi) a ±Vcc (è una conseguenza della instabilità della soluzione
Vin = Vout = 0). Il circuito va analizzato verificando quali valori della tensione di ingresso siano compatibili con l’uscita in saturazione. Essendo la corrente
entrante nei morsetti dell’operazionale nulla, risulta
Vx =
(Vout − Vin )R1
+ Vin = βVout + Vin (1 − β)
R1 + R2
(2.1)
Dal momento che Vid > 0 ⇒ Vout = Vcc e che Vid < 0 ⇒ Vout = −Vcc risulta
Condizione di compatibilità per Vin affinchè Vout = Vcc
Dalla (2.1)
Vid = Vx > 0 ⇒ Vin > −
βVcc
−10/4
=
≈ −3.33V
1−β
3/4
(2.2)
Condizione di compatibilità per Vin affinchè Vout = −Vcc
Dalla (2.1)
Vid = Vx < 0 ⇒ Vin < +
βVcc
+10/4
=
≈ 3.33V
1−β
3/4
(2.3)
Assumendo di far variare in modo monotono crescente l’ingresso da −10V a
+10V si ottiene pertanto il grafico (a) riportato in Fig. 2.3. Viceversa, assumendo
di far variare in modo monotono decrescente l’ingresso da +10V a −10V si ottiene il grafico (b). Se ne evince che il circuito è affetto dalla isteresi riportata nel
grafico (c).
—————- ~ —————14
Vout
+Vcc
(a)
+10V
−10V
+3.33V
Vin
−Vcc
+Vcc
(b)
Vout
+10V
−3.33V
−10V
Vin
−Vcc
Vout
+Vcc
(c)
+10V
−3.33V
−10V
+3.33V
Vin
−Vcc
Figura 2.3: Isteresi del trigger di Schmitt a logica positiva dell’Es. 2.1.1.
2.2
Circuiti con retroazione positiva e negativa
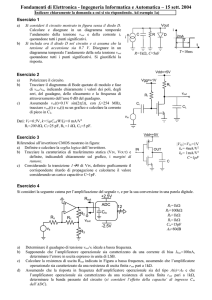
Esercizio 2.2.1 Si consideri il circuito in Fig. 2.4 in cui R1 = R2 = R3 = R4 =
1kΩ, RL = 500Ω e Vcc = 15V . Determinare l’insieme dei valori di VK per cui il
circuito ammette soluzione e calcolare la corrente che scorre su RL .
Soluzione. Nel circuito è presente una retroazione positiva ed una negativa. L’insieme dei valori VK per cui il circuito ammette soluzione è determinato dai punti
fissi del sistema, ovvero da quei valori delle tensioni ai nodi e delle correnti nei
rami per cui sono congiuntamente soddisfatte tutte le leggi che regolano il circuito
(equazioni di Kirchoff per le correnti ai nodi, ecc...). Al fine di poter individuare
i punti fissi del sistema in questo tipo di circuiti si rende in generale necessario
15
R2
R1
+Vcc
Vy
−Vcc
Vx
R3
R4
2V
VK
RL
Figura 2.4: Circuito dell’Es. 2.2.1.
porre volta per volta l’amplificatore operazionale in uno dei suoi possibili stati
ideali (vedi Fig. 2.1):
1. uscita satura a +Vcc (Vid > 0)
2. uscita satura a −Vcc (Vid < 0)
3. uscita non satura ad un qualunque valore di tensione compreso fra Vcc e Vee ,
con Vid = 0
ed esaminare l’esistenza di soluzioni per il circuito.
1) Ipotesi di uscita dell’operazionale satura a +Vcc (Vid > 0)
In questa ipotesi deve essere Vx > Vy e VK = Vcc . Risulta
Vcc
Vcc R1
=
= 7.5V
R1 + R2
2
(2.4)
Vcc · R4 //RL
2 · R3 //RL
17
+
=
= 4.25V
R3 + R4 //RL R4 + R3 //RL
4
(2.5)
Vy =
Tuttavia
Vx =
Ma allora abbiamo ottenuto Vx < Vy ⇒ Vid < 0 che è un assurdo poichè contraddice l’ipotesi. Ne consegue che per VK = +Vcc il circuito non ammette soluzione.
2) Ipotesi di uscita dell’operazionale satura a −Vcc (Vid < 0)
In questa ipotesi deve essere Vx < Vy e VK = −Vcc . Risulta
Vy =
−Vcc R1
−Vcc
=
= −7.5V
R1 + R2
2
16
(2.6)
Tuttavia
Vx =
2 · R3 //RL
−13
−Vcc · R4 //RL
+
=
= −3.25V
R3 + R4 //RL
R4 + R3 //RL
4
(2.7)
Si ottiene quindi Vx > Vy ⇒ Vid > 0 che è un assurdo poichè contraddice l’ipotesi. Anche in questo caso per VK = −Vcc il circuito non ammette soluzione. Non
rimane che verificare la
3) Ipotesi di uscita dell’operazionale non satura ad un qualunque valore di tensione compreso fra +Vcc e −Vcc , con Vid = 0
In questo caso deve essere Vx = Vy , con
Vy =
VK · R1
VK
=
R1 + R2
2
(2.8)
Impostando il bilancio delle correnti al nodo x si ottiene
VK − VK /2 2 − VK /2
VK
+
=
R3
R4
2RL
(2.9)
da cui
VK
VK
+2−
= VK ⇒ VK = 2V
(2.10)
2
2
Ne consegue che l’unico valore ammissibile per VK è 2V , ed in tale condizione la
corrente che scorre sul resistore RL è pari a IL = 1/500 = 2mA.
Commento ai risultati
La soluzione individuata è una soluzione stabile, la cui stabilità è indotta dalla
prevalenza della retroazione negativa su quella negativa. Eseguendo una analisi
alle variazioni del circuito ad anello aperto1 nell’intorno del punto VK = 2V , una
variazione infinitesima dVK della tensione VK comporta una variazione dVy =
dVK R1
K RL //R4
= dVK /2 sul morsetto invertente ed una variazione dVx = dV
=
R1 +R2
RL //R4 +R3
dVK /4 sul morsetto non invertente, da cui sull’uscita dell’operazionale è indotta
una variazione
dVo = A dVid = A (dVx − dVy ) = −A
dVK
4
(2.11)
col predominio della retroazione negativa su quella positiva. In tale condizione,
a seguito di una perturbazione, il sistema tende naturalmente a ristabilizzarsi sul
suo unico punto di equilibrio caratterizzato da VK = 2V .
—————- ~ —————1
Ovvero staccando l’uscita dell’amplificatore operazionale dal nodo VK
17
Esercizio 2.2.2 Si consideri il circuito in Fig. 2.5, in cui Vcc = 10V , R1 =
1kΩ,R2 = 10kΩ,R3 = 9kΩ e si assuma per il diodo D il modello ideale2 con
caduta di tensione VON = 0.5V . Determinare l’insieme dei valori di Vout per cui
il circuito ammette soluzione.
R2
R3
Vx
D
R1
+Vcc
Vy
−Vcc
Vout
Figura 2.5: Circuito dell’Es. 2.2.2.
Soluzione. Analogamente a quanto visto nell’Es. 2.2.1, nel circuito di Fig. 2.5
sono presenti una retroazione positiva ed una negativa. Anche in questo caso,
al fine di poter individuare i punti fissi del sistema saranno cercate soluzioni che
siano compatibili con l’amplificatore operazionale posto volta per volta in uno dei
suoi possibili stati ideali (vedi Fig. 2.1):
1. uscita satura a +Vcc (Vid > 0)
2. uscita satura a −Vcc (Vid < 0)
3. uscita non satura ad un qualunque valore di tensione compreso fra Vcc e Vee ,
con Vid = 0
1) Ipotesi di uscita dell’operazionale satura a +Vcc (Vid > 0)
Il diodo in tale condizione è in conduzione, per cui - in riferimento al modello
ideale del diodo - qualunque sia la corrente sul resistore R3 si ha Vx = 0.5V . La
tensione Vy invece è data semplicemente dal partitore
Vy =
10
Vcc · R1
=
≈ 0.91V
R1 + R2
11
2
(2.12)
Applicando tale modello al diodo D nel circuito di Fig. 2.5, la corrente ID verso massa che
scorre nel diodo è nulla per Vx < VON e qualunque (positiva) per Vx = VON .
18
Ma allora abbiamo ottenuto Vx < Vy ⇒ Vid < 0 che è un assurdo poichè contraddice l’ipotesi. Ne consegue che per Vout = +Vcc il circuito non ammette
soluzione.
2) Ipotesi di uscita dell’operazionale satura a −Vcc (Vid < 0)
In tal caso il diodo è interdetto e sul resistore R3 non scorre corrente. Ne consegue
che Vx = Vout = −Vcc = −10V . Vy invece è data dal partitore
Vy =
−Vcc · R1
10
= − ≈ −0.91V
R1 + R2
11
(2.13)
Abbiamo trovato in questo caso Vy > Vx ⇒ Vid < 0. Ne consegue che per
Vout = −Vcc il circuito ammette soluzione. Per concludere è necessario analizzare se esistano altre soluzioni compatibili con la
3) Ipotesi di uscita dell’operazionale non satura ad un qualunque valore di tensione compreso fra +Vcc e −Vcc , con Vid = 0
In questo caso deve essere necessariamente Vx = Vy . Se il diodo è interdetto
(Vout < VON ) abbiamo che Vx = Vout , e
Vy =
Vout · R1
Vout
=
R1 + R2
11
(2.14)
da cui Vx = Vy se e solo se Vout = 0. Se il diodo è in conduzione (Vout ≥ VON ),
si ha che Vx = 0.5V e che l’unico valore di Vout per cui Vy = 0.5 dalla (2.14) è
Vout = 5.5V .
Ricapitolando risulta che il circuito ammette soluzione per i valori di
Vout ∈ {−10V, 0V, 5.5V }.
Commento ai risultati
I tre valori sopra individuati sono soluzioni formali del problema, ma solo i valori
Vout = −10V e Vout = +5.5V rappresentano soluzioni stabili del circuito, mentre
la soluzione Vout = 0V è instabile. Questo è dimostabile operando come nell’Es.
2.2.1. Si consideri ad esempio la soluzione Vout = 0 e si analizzi alle variazioni
il circuito ad anello aperto3 nell’intorno di questo punto. Ne consegue che nell’intorno di Vout = 0 il diodo è un circuito aperto e che una variazione dVout al
nodo Vout comporta una variazione dVx = dVout al nodo Vx , mentre la stessa vari1
azione dVout comporta una variazione dVy = dVout R1R+R
= dV11out al nodo Vy . Ne
2
consegue che sull’uscita dell’operazionale è
dVo = AdVid = A(dVx − dVy ) = A(dVout −
3
dVout
10
) = A dVout
11
11
Ovvero staccando l’uscita dell’amplificatore operazionale dal nodo Vout
19
(2.15)
col predominio della retroazione positiva su quella negativa. In tale condizione,
a seguito di una perturbazione, il sistema tende a divergere dal punto considerato
Vout = 0V . E’ lasciato per esercizio effettuare lo stesso tipo di analisi per le
due soluzioni stabili Vout = −10V e Vout = +5.5V (Per il punto Vout = −10V
sono di interesse solo le perturbazioni positive, giacché l’uscita non può divergere
negativamente oltre i −10V ).
—————- ~ —————-
2.3
2.3.1
Circuiti astabili
Generatori di onda quadra
Esercizio 2.3.1 Si consideri il generatore di onda quadra in Fig. 2.6 con RU =
2kΩ, RD = 3kΩ, RA = 2kΩ, R = 1kΩ, C = 1µF , Vcc = 10V . Calcolare il
periodo ed il duty cycle del segnale generato.
RA
RU
+Vcc
+Vcc
Vx
−Vcc
RD
−Vcc
Vout
VC
R
C
Figura 2.6: Generatore di onda quadra.
Soluzione. L’uscita dell’operazionale rimane satura a +Vcc fintanto che Vx > VC .
Ponendo quindi Vout = Vcc si trova che
VxU =
(Vcc − (−Vcc )) · RD
− Vcc = 5V
RD + RU //RA
(2.16)
Analogamente, l’uscita dell’operazionale rimane satura a −Vcc fintanto che Vx <
VC . Ponendo Vout = −Vcc si trova che
VxD =
(Vcc − (−Vcc )) · RD //RA
− Vcc = −2.5V
RU + RD //RA
20
(2.17)
I valori della tensione VC che determinano la commutazione del circuito sono
pertanto 5V e 2.5V . Fissato in t = 0 l’istante della commutazione dell’uscita
dell’operazionale si ha che
VC (t) = (Vout − VC (0))(1 − e−t/RC ) + VC (0)
(2.18)
Assumendo Vout commutato su Vcc = 10V e VC (0) = −2.5V si ha che il periodo
di tempo ∆tU per cui l’uscita è alta è il tempo per cui è verificata l’equazione
VCU (∆tU ) = (10 − (−2.5))(1 − e−∆tU /RC ) − 2.5 = 5V = VxU
(2.19)
da cui
∆tU = −RC ln 0.4 ≈ 0.916 ms
(2.20)
analogamente, assumendo Vout commutato su −Vcc = −10V e VC (0) = 5V si ha
che il periodo di tempo ∆tD per cui l’uscita è bassa è il tempo per cui è verificata
l’equazione
VCD (∆tD ) = (−10 − 5)(1 − e−∆tD /RC ) + 5 = −2.5V = VxD
(2.21)
da cui
∆tD = −RC ln 0.5 ≈ 0.693 ms
(2.22)
Ne consegue che il periodo del segnale generato è T = ∆tU + ∆tD = 1.609 ms,
mentre il duty cycle è
∆tU
duty cycle =
≈ 57%
(2.23)
T
—————- ~ —————-
21
Capitolo 3
Convertitori A/D e D/A
Negli esercizi di questo capitolo, quando non altrimenti specificato, per gli amplificatori operazionali impiegati saranno assunte le seguenti caratteristiche R0 =
0Ω, Rid = ∞, CM RR = ∞, VOS = 0V, IB1 = IB2 = 0A, SR = ∞ e risposta
in frequenza a singolo polo (1.1). In riferimento alle nozioni introdotte durante il
corso, sarà utilizzata la seguente notazione:
• SN R : rapporto segnale rumore
• n : numero dei bit del convertitore
• fc =
1
Tc
: frequenza di campionamento [Hz]
• tconv : tempo di conversione del convertitore A/D [s]
• tacq : tempo di acquisizione del Sample and Hold (S&H)[s]
• tset : tempo di settling del S&H [s]
• ∆tj jitter del ritardo di apertura del S&H [s]
• Droop : velocità di scarica della capacità di campionamento in fase di hold
[V /s]
• VF S : tensione di fondo scala del convertitore A/D [V ]
• VLSB =
VF S
2n
: risoluzione del converitore A/D [V ]
22
A/D
converter
C
DIGITAL SIGNALS
Vin
Figura 3.1: Stadio di acquisizione Sample and Hold
3.1
Acquisizione dei dati
Esercizio 3.1.1 Nello stadio Sample and Hold di Fig. 3.1 i due amplificatori
operazionali sono caratterizzati da correnti di polarizzazione Ib1 = Ib2 = 0.1µA,
e presentano una resistenza di ingresso di 10M Ω. Assumendo
• Vin (t) ≥ 0;
• banda di Vin (t) = 5kHz;
• C = 1nF
• convertitore A/D a 6 bit;
• dinamica del convertitore sempre adattata alla dinamica del segnale di
ingresso.
Si determini
1. il valore limite per la somma dei tempi di settling e di acquisizione
2. il minimo valore della dinamica di Vin
se il tempo di conversione del convertitore A/D rappresenta il 75% del tempo
totale disponibile per l’acquisizione e conversione di un singolo campione alla
frequenza di Shannon, ed se la la massima variazione di tensione sulla capacità
di tenuta durante il tempo di conversione deve essere inferiore ad 1VLSB .
Soluzione. Assumendo che il segnale di ingresso sia a banda limitata di 5kHz esso deve essere acquisito almeno ad una frequenza di campionamento fc ≥ 10kHz.
Assumendo Tc = 1/fc = 10−4 s deve risultare
tacq + tset + tconv ≤ Tc
23
Vin
A/D
converter
C
Ib
R
DIGITAL SIGNALS
A
B
Figura 3.2: Modello usato nell’Es.3.1.1
R
A
−Ib R
C
B
Figura 3.3: Scarica della capacità sul modello equivalente di Thevenin del bipolo
A-B a valle (Es. 3.1.1)
da cui, imponendo che il tempo di conversione dell’A/D sia pari al 75% del tempo
totale necessario all’acquisizione e conversione del dato deve essere
tacq + tset ≤
Tc
= 0.25 · 10−4 s
4
a cui corrisponde
3Tc
= 0.75 · 10−4 s
(3.1)
4
Adesso è necessario valutare il droop legato alle perdite del circuito. In particolare le non idealità introdotte determinano il modello di Fig. 3.2. L’andamento
temporale della tensione sulla capacità segue un andamento esponenziale la cui
espressione è di immediata determinazione una volta esplicitato l’equivalente di
Thevenin del circuito a valle della sezione A-B in Fig. 3.3. Durante la fase di
hold la tensione ai capi della capacità segue la legge
t
VC (t) = VC (0) − (Ib R + VC (0)) 1 − e− RC
tconv = 3(tacq + tset ) ≤
che per valori di t << RC = 10−2 s può essere approssimata1 considerando il
troncamento ai termini di primo grado della serie di Taylor di
t
t
+ o(t2 )
(1 − e− RC ) =
RC
1
Condizione ampiamente soddisfatta, considerando la (3.1)
24
ottenendo
(Ib R + VC (0)) t
RC
Il valore della capacità in t = 0 (inizio della fase di hold) è pari a Vin , per cui si
richiede che alla fine della conversione la variazione della tensione ai capi della
capacità non sia superiore a VLSB = V2FnS ovvero, essendo il convertitore a n = 6
bit
VF S
(Ib R + Vin ) tconv
< 6
(3.2)
RC
2
La (3.2) pone la condizione più stringente quando Vin = VF S , da cui si ottiene
VC (t) ≈ VC (0) −
(1 + VF S )tconv <
ovvero
VF S >
VF S
100 · 26
6400tconv
1 − 6400tconv
Assumendo tconv = 0.75 · 10−4 (il massimo ammissibile per tconv ) si ottiene
VF S > 0.93V .
—————- ~ —————-
25
Capitolo 4
Elettronica digitale
4.1
Invertitori n-MOS
Esercizio 4.1.1 Si consideri l’invertitore di Fig. 4.1. Trascurando l’effetto body e
la modulazione di canale, calcolare VOL , VOH e la potenza statica media dissipata assumendo per i due transistor Vdd = 5V, Kn1 = 100µA/V 2 , Kn2 =
400µA/V 2 , VT n = 1V .
Vdd
D
M1
G
S
D
Vin
G
M2
Vout
S
Figura 4.1: Inverter n-MOS con carico attivo connesso a diodo.
Soluzione. Il transistor M1 è connesso a diodo, ovvero su di esso scorre una
corrente nulla per Vdd − Vout < VT n , mentre per Vdd − Vout ≥ VT n , risultando
sempre verificata la condizione di saturazione, scorre una corrente circa1 pari a
Kn1 (Vdd − Vout − VT n )2 . La tensione di uscita VOL è ottenuta assumendo in ingresso la tensione VOH e viceversa.
1
Ovvero trascurando la modulazione di canale e l’effetto substrato.
26
I [mA]
3.5
I2 @ Vin = VOH
3
2.5
2
1.5
I1
1
0.5
0
0
0.5
1
1.5
2
2.5
VOL
3
3.5
4
4.5
5
Vout [V]
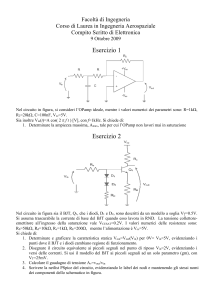
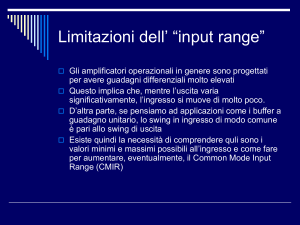
Figura 4.2: Individuazione grafica del punto Vout = VOL per il circuito di Fig. 4.1.
Calcolo di VOH .
Per un corretto funzionamento di questo tipo di strutture circuitali è necessario
che la tensione VOL posta in ingresso sia tale da interdire il transistor pilotato M2
(ovvero VOL < VT n ). Assumendo per ipotesi tale condizione verificata, in seguito
ad una transizione alto-basso del segnale di ingresso, la capacità connessa al nodo
di uscita Vout viene caricata attraverso M1 alla tensione Vdd − VT n , valore oltre il
quale si ha l’interdizione di M1 . Pertanto se ne evince che per questo invertitore
VOH = Vdd − VT n = 4V .2
Calcolo di VOL .
Posto Vin = VOH è ragionevole assumere che il transistor M2 si trovi in regione
di triodo. Tale supposizione è giustificata osservando la Fig. 4.2, ed avendo ipotizzato VOL < VT n . Il valore dell’uscita Vout = VOL è determinato imponendo
l’uguaglianza fra le correnti che scorrono nei due transistor:
2
Kn2 [2(VGS2 − VT n )VDS2 − VDS2
] = Kn1 (VGS1 − VT n )2
(4.1)
da cui, assumendo VGS2 = Vin = VOH = 4V
VOL
2
Kn2 [2(VOH − VT n )VOL − VOL
] = Kn1 (Vdd − VOL − VT n )2
√
32 ± 322 − 20 · 16
0.55V
≈
≈
5.8V ( soluzione impossibile)
10
2
(4.2)
(4.3)
Tenendo conto dell’effetto body, sarebbe corretto scrivere VOH = Vdd − VT n1 (VOH ), poichè
se Vout > 0 per il transistor M1 risulta VSB > 0.
27
Verifica dei risultati.
Per la convalida dei risultati ottenuti è necessario verificare le ipotesi fatte:
• VOL ≈ 0.55V ⇒ (VOL < VT n ) è verificata;
• VOL ≈ 0.55V ⇒ (VOL < VOH − VT n ), ovvero il transistor M 2 è effettivamente in regione di triodo.
Calcolo della potenza statica media dissipata.
L’invertitore dissipa potenza statica solo nello stato Vout = VOL , poichè nello
stato Vout = VOH il transistor M 2 è in condizione di interdizione. Assumendo i
due stati dell’inverter equiprobabili risulta
PDstat (VOL )
PDstat (VOL ) + PDstat (VOH )
=
=
2
2
Vdd · I1 (VOL )
Vdd Kn1 (Vdd − VOL − VT n )2
=
=
≈
2
2
≈ 2.95mW
PDstat =
(4.4)
(4.5)
(4.6)
—————- ~ —————-
4.2
Invertitori C-MOS
Esercizio 4.2.1 Si consideri l’invertitore di Fig. 4.3 dove i due transistor sono
caratterizzati da VT n = |VT p | = 1V . Assumendo Vdd = 1.5V determinare
l’andamento della tensione di uscita in funzione di quella di ingresso.
Soluzione. Analizziamo il comportamento del circuito variando in modo crescente la tensione di ingresso da 0V a Vdd = 1.5V . Il transistor M1 è in conduzione
se Vin > VT n = 1V , mentre il transistor M2 è in conduzione se Vin < Vdd − VTn =
0.5V . Ne consegue che per 0 ≤ Vin < 0.5V il transistor M2 è interdetto, mentre
M1 è in conduzione, mantenendo l’uscita a Vdd = 1.5V . Per 0.5 ≤ Vin ≤ 1V entrambi i transistor sono interdetti. In questa situazione la capacità CL si mantiene
carica alla tensione Vout = 1.5V . Per 1 < Vin ≤ 1.5V il transistor M2 passa
alla conduzione, portando l’uscita a Vout = 0V . L’analisi si completa facendo
variare in modo decrescente la tensione di ingresso da 1.5V a 0V , ottenendo in
conclusione il ciclo di isteresi riportato in Fig. 4.4
—————- ~ —————Esercizio 4.2.2 Si consideri la cascata di due invertitori identici di Fig. 4.5.
Assumendo i transistor caratterizzati da VT n = |VT p |, Wn = Ln = Lp , µn =
2.5µp , Kn = Kp
28
Vdd
M1
Vin
Vout
M2
CL
Figura 4.3: Inverter CMOS con carico capacitivo CL .
Vout
1.5V
0V
0.5V
1.0V
1.5V
Vin
Figura 4.4: Isteresi del circuito di Fig. 4.3 con Vdd = 1.5V, VT n = −VT p = 1V .
1. fornire una stima approssimata del carico capacitivo del primo inverter;
2. calcolare il tempo di propagazione del primo inverter, assumendo in ingresso un segnale ideale a transizioni istantanee.
3. Risolvere i punti 1) e 2) assumendo VT n = |VT p |, Wp = Wn = Ln =
Lp , µn = 2.5µp .
Soluzione. Il primo inverter presenta un carico capacitivo dato della capacità di
ingresso del secondo inverter.
Soluzione ai punti 1) e 2).
29
Vdd
Vin
M1
M3
M2
M4
Vout
Figura 4.5: Cascata di due invertitori CMOS.
In prima approssimazione la capacità risultante corrisponde alla somma
CL ≈ Cox (Wn Ln + Wp Lp ) = 3.5 Cox Wn Ln
Il risultato è calcolato tenendo conto che essendo Ln = Lp e µn = 2.5µp risulta
(Kn = Kp ) ⇒ (Wp = 2.5Wn ). Il tempo di propagazione è dato da
tP =
tP HL + tP LH
2
Il tempo tP HL corriponde a quello necessario alla tensione di uscita per passare da
VOH a metà dello swing logico. In questo caso la capacità è scaricata attraverso
l’nMOS, da cui
VOH −VOL
CL
Vdd 3.5 Wn Ln Cox
2
(4.7)
=
tP HL ≈
|Isat |n
2Kn (Vdd − VT n )2
Analogamente si calcola il tempo tP LH
VOH −VOL
CL
Vdd 3.5 Wn Ln Cox
2
tP LH ≈
=
|Isat |p
2Kp (Vdd − VT p )2
(4.8)
Con riferimento ai dati del problema si trova
tP ≈
Vdd 3.5 Wn Ln Cox
2Kn (Vdd − VT n )2
Soluzione al punto 3).
30
(4.9)
Con i nuovi dati risulta che in prima approssimazione la capacità CL corrisponde
alla somma
CL ≈ Cox (Wn Ln + Wp Lp ) = 2 Cox Wn Ln
Analogamente al caso precedente le (4.7)-(4.8) risultano
VOH −VOL
CL
Vdd Wn Ln Cox
2
=
tP HL ≈
|Isat |n
Kn (Vdd − VT n )2
VOH −VOL
CL
Vdd Wn Ln Cox
2
=
tP LH ≈
|Isat |p
Kp (Vdd − VT p )2
Essendo Wp = Wn = Ln = Lp e µn = 2.5µp risulta Kn = 2.5 Kp da cui
1
2.5
Vdd 3.5 Wn Ln Cox
Vdd Wn Ln Cox
+
=
tP ≈
2(Vdd − VT )2 Kn Kn
2Kn (Vdd − VT n )2
(4.10)
(4.11)
(4.12)
Commento ai risultati.
Osservando le espressioni trovate si evidenzia come i tempi di propagazione di un
inverter CMOS simmetrico (VT n = |VT p | e Kn = Kp ) con l’nMos realizzato ad
area minima ha lo stesso tempo di propagazione di un inverter CMOS realizzato
con entrambi i transistor ad area minima (con conseguente non simmetria legata a
Kn 6= Kp ). In quest’ultimo caso tuttavia risulta che il tP LH è oltre due volte più
grande del tP HL .
—————- ~ —————Esercizio 4.2.3 Quando il segnale di ingresso è un’onda quadra reale a valori
0V − 10V l’inverter CMOS simmetrico di Fig. 4.3 con Vdd = 10V e carico CL =
50pF assorbe mediamente una corrente di alimentazione pari a 0.8uA/kHz. Stimare qual’è la componente di questa corrente che deriva dalla carica e scarica del carico capacitivo. Dire a quali cause è dovuta la parte rimanente della
corrente media assorbita.
Soluzione. Nell’ipotesi che le costanti di tempo del circuito (RON CL ) siano
almeno 4-5 volte più piccole del periodo del segnale di ingresso, durante ogni
periodo per la carica e scarica della capacità CL viene dissipata una energia circa
2
pari a CL Vdd
. Essendo l’inverter alimentato costantemente a Vdd , ne consegue
che la corrente mediamente assorbita è pari a CL f Vdd , dove f è la frequenza del
segnale di ingresso. Normalizzando rispetto alla frequenza di lavoro si ottiene una
corrente mediamente assorbita pari a CL Vdd = 50 · 10−12 · 10 = 0.5uA/kHz. La
parte rimanente della corrente mediamente assorbita è dovuta alla corrente che
attraversa la serie dei due transistor M1 ed M2 durante le transizioni del segnale
di ingresso.
31