Limitazioni dell’ “input range”
Gli amplificatori operazionali in genere sono progettati
per avere guadagni differenziali molto elevati
Questo implica che, mentre l’uscita varia
significativamente, l’ingresso si muove di molto poco.
D’altra parte, se pensiamo ad applicazioni come i buffer a
guadagno unitario, lo swing in ingresso di modo comune
è pari allo swing di uscita
Esiste quindi la necessità di comprendere quli sono i
valori minimi e massimi possibili all’ingresso e come fare
per aumentare, eventualmente, il Common Mode Input
Range (CMIR)
Esempio
Vdd
Vb3
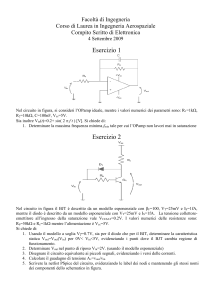
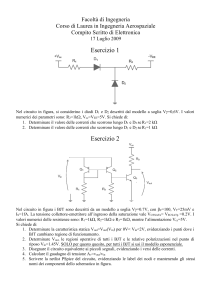
Consideriamo un
M9
Vb2
M4
Vin
amplificatore
differenziale
telescopico “folded
cascode” configurato
come buffer a
guadagno unitario
In questo caso la
minima tensione di
ingresso è data da
Vin,min=Vgs1,min+VISS
M10
M1
M3
M2
ISS
M5
M6
M7
M8
Vb1
…
Cosa accade se la tensione di ingresso
scende al di sotto di Vin,min?
1.
2.
3.
Il generatore di corrente ISS entra in zona
di triodo
La sua corrente di uscita diminuisce
La transconduttanza di M1,2 diminuisce di
conseguenza
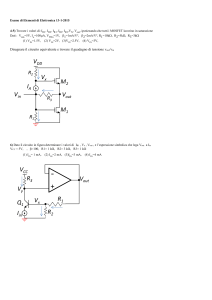
Possiamo quindi pensare a dei
meccanismi che “ripristinano” il valore
di transconduttanza
Soluzione
Vdd
Vb3
M10
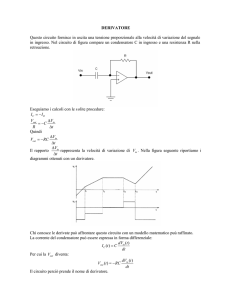
Possiamo pensare di
M1
M2
Vb2
M4
M3
M6
M5
Vdd
Vout
ISS1
Vin
rendere attiva anche la
parte NMOS della
struttura folded
introducendo una coppia
differenziale PMOS che
si attiva quando gli
NMOS si spengono.
In definitiva, quando la
transconduttanza degli
NMOS diminuisce, quella
dei PMOS aumenta
mantenendo abbastanza
inalterato il
funzionamento del
circuito
M9
ISS2
Vb1
M12
M11
M8
M7
Slew Rate
Gli amplificatori operazionali, in
generale, sono circuito ad un singolo
polo dominante
Sappiamo che la risposta al gradino di
circuiti ad un solo polo è un
esponenziale
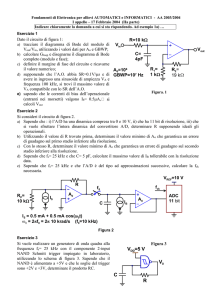
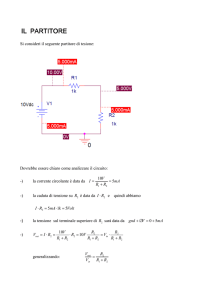
Negli operazionali però esiste un
comportamento non lineare che cambia
la risposta al gradino se l’ampiezza del
segnale di ingresso è troppo elevata
In dettaglio
Vin V iu(t )
1.5
1.25
1
0.75
0.5
0.25
0
0
4.5
4
3.5
3
2.5
2
1.5
1
0.5
00
20
40
60
80
100
Vdd
α=SR
10 20 30 40 50 60 70 80 90 100
t
Vout Vi 1 exp
Vout Vi
t
exp
t
Vin V iu (t )
Vout t
Vout
SR
t
Origine della Slew Rate
L’andamento della tensione di uscita nel
caso che sia evidente il fenomeno della
slew rate ci suggerisce che esista una
capacità che si carica a corrente
costante
V
I
I
I C
V (t ) t SR
t
C
C
Chi sono I e C ?
Per la corrente I ci sono pochi dubbi, è la
corrente di polarizzazione dello stadio
differenziale che, nel caso di tensioni in
ingresso troppo elevata, viene commutata tutta
in uno dei due rami del differenziale stesso
C dipende dalla configurazione di operazionale
che stiamo considerando:
Può essere la semplice capacità di carico
Oppure può essere la capacità di compensazione
inserita per rendere stabile il circuito
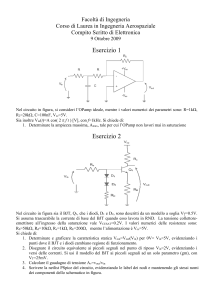
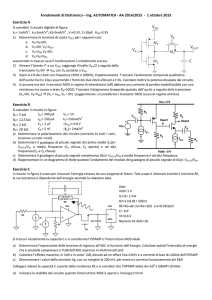
Esempio: gradino positivo
Vdd
M3
M4
Iss
CL
M1
M2
R1
Vin
R2
Iss
Esempio: gradino negativo
Vdd
M3
M4
Iss
CL
M1
M2
R1
Vin
R2
Iss
Reiezione alle variazioni di
Vdd (PSRR)
La tensione di alimentazione viene portata ai
circuiti attraverso linee che, nel loro percorso,
possono raccogliere rumore indesiderato
Questo rumore si propaga attraverso percorsi
resistivi e/o capacitivi, verso l’uscita
dell’operazionale
Si definisce il rapporto di reiezione alle
variazioni dell’alimentazione PSRR come il
rapporto tra il guadagno differenziale e il
guadagno tra alimentazione e uscita