STUDIO DELLE TRASFORMAZIONI LINEARI UTILIZZANDO GLI STRUMENTI DI CABRI
Introduzione
Nel triennio del liceo scientifico l’approccio allo studio delle Trasformazioni lineari è prevalentemente
analitico. Poiché il metodo delle coordinate , pur molto potente per la risoluzione di problemi, rischia di far
perdere di vista l’aspetto grafico è opportuno affiancare alla trattazione analitica alcune esercitazioni
idonee a recuperare l’approccio sintetico.
L’uso del software didattico CABRI , oltre ad agevolare il disegno geometrico, permette di
studiare le proprietà delle figure in modo dinamico , favorisce l’intuizione e la curiosità.
Poiché in ambiente Cabri sono predefinite solo le trasformazioni elementari (traslazione,rotazione,
simmetria assiale, simmetria centrale e omotetia) lo studio delle trasformazioni più generali, dalle
similitudini alle affinità, va affrontato con un preciso itinerario didattico.
Si presentano due alternative:
A)
Definire una macrocostruzione per una generica affinità, secondo l’approccio analitico tradizionale
che collega le proprietà di una trasformazione con la matrice dei coefficienti delle equazioni lineari
che la definiscono.
Utilizzando la Macro considerare i casi particolari e cogliere le caratteristiche dei vari tipi di
trasformazione , dalle affinità generiche alle isometrie( processo di restrizione)
B)
Partire dalle trasformazioni lineari predefinite in Cabri, passando poi alle similitudini, all’omologia
affine e all’affinità ( processo di estensione)
Rafforzarne il legame con il fenomeno fisico con un cenno alla genesi spaziale delle trasformazioni
del piano
Estensione
Restrizione
1
Il secondo metodo si è rivelato più agevole ed efficace in quanto evita il ricorso alla macrocostruzione
dell’affinità generica, la cui costruzione e la cui interpretazione aggiungono complessità all’argomento
Destinatari:
Studenti di Terza o Quarta classe del liceo scientifico sperimentale (Piano Nazionale Informatica)
Obiettivi:
Visualizzare attraverso il computer gli effetti delle trasformazioni lineari sulle figure piane, a partire
dalle quelle predefinite in ambiente, definendo eventualmente alcune MACRO
Favorire la concettualizzazione di
Invariante
Punto unito e retta unita
Prodotto operatorio
Confrontare la definizione di trasformazione come <<azione>> su una figura con quella di
trasformazione come corrispondenza tra i punti del piano
Rafforzare il legame tra approccio analitico ed approccio sintetico
Invertire l’itinerario del metodo delle equazioni con cui, con un processo di restrizione, si passa dalle
trasformazioni più generali a quelle particolari
Abituare gli studenti ad organizzare e argomentare i risultati del lavoro svolto
Metodologie
Lezione frontale : in classe e in laboratorio , dove il computer è usato come <<lavagna elettronica>>
Lavoro di gruppo degli studenti in laboratorio di informatica( esercitazioni, osservazioni , congetture e
verifiche) sulla base di schede di lavoro che possono fornire allo studente una guida dettagliata o limitarsi
a porre un problema, lasciando allo studente il compito di progettare strategie risolutive
Stesura di una relazione di gruppo da parte degli studenti, in classe o a casa.
Presentazione delle relazioni in laboratorio
Prerequisiti
Conoscenze di base della Geometria Analitica e della Trigonometria
Concetto di Trasformazione lineare
Classificazione delle trasformazioni lineari in base alla tipologia delle loro equazioni
2
ISOMETRIE
Obiettivi
approfondire l’uso degli strumenti di Cabri
costruire le isometrie;
verificare le proprietà delle isometrie;
confrontare i vari tipi di isometrie;
individuare gli invarianti delle isometrie.
Prerequisiti
Procedure di base dell’ambiente Cabri
Concetto di traslazione, simmetria centrale, rotazione, simmetria assiale
3
SCHEDA N.1
OPERAZIONI PRELIMINARI
a)Apri
Cabri e
attiva Help
b)Fai comparire gli
assi
c)Fai comparire la
griglia
d)Costruisci gli oggetti rappresentati in figura
. I l punto P deve essere vincolato sulla
circonferenza)
e)Apri un File in formato Word in cui annotare le
osservazioni e salvare le immagini : per copiare una
figura di Cabri basta
Selezionare col puntatore l’area prescelta
Da EDITA selezionare Copia
Incollare nel File -word
4
SCHEDA N.2
TRASLAZIONE
Si dice traslazione associata al vettore
la corrispondenza biunivoca tra i
punti del piano che associa ad un punto qualsiasi A il punto A' tale che il vettore
equipollente a .
sia
Una traslazione è definita dalle equazioni
a)Dalle equazioni alla costruzione delle figure corrispondenti
↗
↗
Assegna a tuo piacimento un
valore a i due parametri h e k e
traccia sullo schermo il vettore
associato alla traslazione
Seleziona Traslazione
Trasla gli oggetti precedentemente
costruiti , come nell’esempio, dove h=3 e
k=2
b)Verifica delle proprietà
Con l’ausilio degli strumenti di Cabri verifica se la trasformazione conserva
□
□
□
□
Le lunghezze dei lati del triangolo
Le ampiezze degli angoli
La pendenza delle rette
Il verso di percorrenza del contorno delle figure
c)Dai punti corrispondenti alle equazioni
Assegnati i due punti A(2;3) e A’ (-2,1) esiste una traslazione che porta A in A’ ?
In caso affermativo, è unica ?
Costruzione:
Per definizione di traslazione il vettore non è altri che il vettore .
La traslazione è quindi univocamente determinata dalla conoscenza di due punti corrispondenti
d)Calcolo:
Determina h e k
Scrivi le equazioni della traslazione
Verifica analiticamente che A corrisponde ad A’
5
SCHEDA N.3
SIMMETRIA CENTRALE
Si chiama simmetria centrale di centro M(xo,yo) , la corrispondenza biunivoca fra i punti del piano,
che ad ogni punto A associa il punto A' tale che M sia il punto medio del segmento AA’
Una simmetria centrale è definita dalle equazioni
a)Dalle equazioni alla costruzione delle figure corrispondenti
↗
↗
Assegna a tuo piacimento un
valore ai due parametri xo e yo e
traccia sullo schermo il punto M
che rappresenta il centro di
simmetria
b)Verifica delle proprietà
Seleziona Simmetria
centrale
Costruisci i simmetrici degli oggetti
precedentemente costruiti , come
nell’esempio, dove xo=-1 e yo=2
Con l’ausilio degli strumenti di Cabri verifica se la trasformazione conserva
□ Le lunghezze dei lati del triangolo
□ Le ampiezze degli angoli
□ La pendenza delle rette
□ Il verso di percorrenza del contorno delle figure
c)Dai punti corrispondenti alle equazioni
Assegnati i due punti A(2;3) e A’ (-2,1) esiste una simmetria
centrale che porta A in A’ ?
In caso affermativo, è unica ?
Costruzione
Per definizione di simmetria centrale, il centro M deve coincidere col punto medio del segmento AA’
La simmetria centrale è quindi univocamente determinata dalla conoscenza di due punti corrispondenti
.
d)Calcolo:
Determina xo e yo
Scrivi le equazioni della simmetria centrale
Verifica analiticamente che A corrisponde ad A’
6
SCHEDA N4
ROTAZIONE
In un piano si chiama rotazione di centro O individuata dall'angolo orientato α, la
corrispondenza biunivoca tra i punti del piano la quale:
al punto O associa il punto stesso,ad ogni altro punto A associa il punto A' tale che i segmenti OA e
OA' siano congruenti e l'angolo tra OA e OA' sia congruente e concorde ad α
Una rotazione di centro O è definita dalle
equazioni
Una rotazione di centro C(p,q) è definita dalle
equazioni
a)Dalle equazioni alla costruzione delle figure corrispondenti
Rotazione di centro O
↗
↗
Assegna a tuo piacimento un valore
all’angolo α (Ctrl-U per l’unità di
misura)
Seleziona Rotazione
ruota gli oggetti precedentemente costruiti ,
come nell’esempio, dove α=30°
b)Verifica delle proprietà
Con l’ausilio degli strumenti di Cabri verifica se la trasformazione conserva
□
□
□
□
Le lunghezze dei lati del triangolo
Le ampiezze degli angoli
La pendenza delle rette
Il verso di percorrenza del contorno delle figure
c) Casi particolari
Osserva cosa succede se all’angolo α si assegnano i valori 180° oppure 360° e commenta i risultati
7
d)Dai punti corrispondenti alle equazioni
Assegnati i due punti A(2;3) e A’ (-2,1) esiste una rotazione che porta A in A’ ?
In caso affermativo, è unica ?
Per definizione di rotazione di centro C e angolo α, il segmento CA deve essere congruente
l’angolo A A’ deve essere uguale a α, quindi
C deve appartenere all’asse del segmento AA’
α corrisponde all’ampiezza dell’angolo A A’
Le rotazioni che portano A in A’ sono pertanto infinite
La rotazione non è quindi univocamente determinata dalla conoscenza di due punti corrispondenti
e
Costruzione:
Seleziona Asse e traccia l’asse del segmento AA’
Seleziona Punto su un oggetto e scegli un punto sul suddetto asse
Seleziona Misura dell’angolo e misura l’angolo A A’
Seleziona Rotazione e verifica che A’ è il corrispondente di A nella rotazione così determinata
e)Calcolo
Sposta il punto C ,osserva come varia α e fissa la posizione corrispondente ad α=90°.
Leggi le corrispondenti coordinate di C
Scrivi le equazioni della rotazione
Verifica analiticamente che A corrisponde ad A’
8
SCHEDA N.5
SIMMETRIA ASSIALE
Si chiama simmetria assiale di asse a , la corrispondenza biunivoca fra i punti del piano,
che ad ogni punto A associa il punto A' tale che la retta AA’ sia perpendicolare ad a e il
punto medio del segmento AA’ appartenga ad a
Una simmetria assiale il cui asse passi per O è definita dalle equazioni
dove θ èil doppio dell’ampiezza dell’angolo che la retta a forma con la direzione positiva dell’asse x
Una simmetria assiale il cui asse non passi per O ( y = mx+q) è definita dalle
equazioni
a)Dalle equazioni alla costruzione delle figure corrispondenti
↗
Scegli una retta a, di equazione y=mx+q ,come
asse di simmetria e disegnala
Seleziona Simmetria
assiale
Costruisci i simmetrici rispetto ad a
degli oggetti precedentemente
costruiti
b)Dai punti corrispondenti alle equazioni
Assegnati i due punti A(2;3) e A’ (-2,1) esiste una simmetria
assiale che porta A in A’ ?
In caso affermativo, è unica ?
Per definizione di simmetria assiale la retta a deve coincidere con la
perpendicolare al segmento AA’ , nel suo punto medio M, coincide
pertanto con l’asse del segmento AA’
La simmetria assiale è quindi univocamente determinata dalla
conoscenza di due punti corrispondenti
9
Costruzione:
Seleziona Asse e traccia l’asse del segmento AA’
Seleziona Simmetria assiale e verifica che A’ è il corrispondente di A nella simmetria così
determinata
c)Calcolo
Leggi sullo schermo il valore di q, intercetta di a sull’asse y
Seleziona Misura dell’angolo e misura l’angolo α che a forma con la direzione positiva dell’asse x
.
Usa lo strumento calcolatrice per calcolare le funzioni goniometriche di θ= 2α
(Per inserire il valore basta cliccare sul numero) ( in alternativa puoi determinare il coefficiente
angolare della reta a e risalire a cos θ e sen θ mediante opportune formule trigonometriche)
Scrivi le equazioni della simmetria assiale
Verifica analiticamente che A corrisponde ad A’
10
PRODOTTO DI DUE ISOMETRIE
Obiettivi
Verificare con metodi sintetici che
Il prodotto di due traslazioni è una traslazione
Il prodotto di due rotazioni aventi lo stesso centro O è una rotazione di centro o
Il prodotto di due rotazioni aventi centro diverso è una rotazione o una traslazione
Il prodotto di una rotazione e di una traslazione è una rotazione
Il prodotto di due simmetrie assiali aventi assi incidenti è una rotazione
Il prodotto di due simmetrie assiali aventi assi paralleli è una traslazione
Il prodotto di una simmetria assiale e di una traslazione è una simmetria assiale oppure una glisso
simmetria
Porre le basi per la definizione di Gruppo di trasformazioni
Abituare gli studenti ad esercitazioni guidate ma anche personalizzate
Prerequisiti
Conoscenza delle proprietà delle principali isometrie del piano Proprie
Concetto di prodotto operatorio
Conoscenza delle procedure di base e dei comandi dell’ambiente Cabri
11
ESERCITAZIONE N.1
Prodotto di due traslazioni
a) Seleziona Vettore e disegna due vettori
e
arbitrari
b) Seleziona Somma di vettori e costruisci la loro somma
c) Seleziona Punto e traccia un punto P arbitrario
d) Seleziona Traslazione e costruisci
Il punto P’ corrispondente di P nella traslazione associata a
Il punto P” corrispondente di P’ nella traslazione associata a
e) Verifica che P e P” si corrispondono nella traslazione associata a
f) Ripeti la verifica dopo aver fatto variare opportunamente
e
g) Cambia l’ordine con cui sono state applicate le due traslazioni e controlla se i risultati non
cambiano (proprietà commutativa)
12
ESERCITAZIONE N.2
Prodotto di due rotazioni
A) Rotazioni aventi lo stesso centro
a) Seleziona Circonferenza e traccia una circonferenza con centro nell’origine e raggio arbitrario
b) Seleziona Punto su un oggetto e traccia tre punti, A,B,C sulla circonferenza
c) Seleziona Misura di un angolo ,misura:
l’angolo
(α)
l’angolo B C (β)
l’angolo A C (α+β)
e trascina i tre numeri sul lato del foglio
d)Seguendo la traccia dell’ ESERCITAZIONE N.1 , verifica che Il prodotto di due rotazioni aventi lo
stesso centro O, associate rispettivamente all’angolo α e all’angolo β, è una rotazione di centro O,
associata all’angolo α+ β
e)Cambia l’ordine con cui sono state applicate le due rotazioni e controlla se i risultati non
cambiano (proprietà commutativa)
B)Rotazioni con centro diverso
a) Seleziona Numero e scegli due numeri che rappresentino il valore di α e il valore di β ( in gradi ,
in modo che α+ β<360°)
b) Seleziona Punto e traccia:
Il punto C1 e il punto C2 ( i due centri di rotazione)
Il punto P e il punto Q
c) Seleziona Rotazione e costruisci
Il punto P’ trasformato di P nella rotazione di centro C1 e angolo α
Il punto P” trasformato di P’ nella rotazione di centro C2 e angolo β
Il punto Q’ trasformato di Q nella rotazione di centro C1 e angolo α
Il punto Q” trasformato di Q’ nella rotazione di centro C2 e angolo β
d)Seleziona asse e traccia
l’asse r del segmento PP”
l’asse s del segmento QP”
e)Seleziona Intersezione di due oggetti e costruisci l’intersezione C di r ed s
13
f) Seleziona Circonferenza e traccia:
la circonferenza di centro C e passante per P
la circonferenza di centro C e passante per Q
Che cosa osservi?
……………………………………………………………………………………………………………………………………………
…………………………………………………
g)Seleziona Misura dell’angolo e misura:
L’angolo
e l’angolo
L’angolo Q Q” e l’angolo Q Q’
Che cosa osservi?
…………………………………………………………………………………………………………………………………
……………………………………………………………
h)Sposta il punto P ( o il punto Q) in modo da farlo coincidere con P” ( o con Q”)
Che cosa osservi?
………………………………………………………………………………………………………………………………………………
………………………………………………
i)Si può affermare che il prodotto delle due rotazioni è una rotazione di centro C e angolo α+ β?
(motivare la risposta)
…………………………………………………………………………………………………………………………………………………………
………………………………………………………..
…………………………………………………………………………………………………………………………………………………………
……………………………………………………
l)Fai variare i valori di α e di β fino ad ottenere α+ β= 360°
Che cosa osservi?
…………………………………………………………………………………………………………………………………………………………………
……………………………
l)Cambia l’ordine con cui sono state applicate le due rotazioni e controlla se i risultati non
cambiano (proprietà commutativa)
14
ESERCITAZIONE N.3
Prodotto di due simmetrie assiali
a)Verifica che:
Il prodotto di due simmetrie assiali aventi gli assi tra loro incidenti nel punto C è una
rotazione di centro C associata ad un angolo doppio di quello formato dai due assi di
simmetria
Il prodotto di due simmetrie assiali aventi gli assi tra loro paralleli è una traslazione
associata ad un vettore perpendicolare ai due assi di simmetria
b)Annota le procedure eseguite e le osservazioni
c)Cambia l’ordine con cui sono state applicate le due simmetrie e controlla se i risultati non cambiano
(proprietà commutativa)
ESERCITAZIONE N.4
Prodotto di una rotazione e di una traslazione
a)Verifica che Il prodotto di una rotazione e di una traslazione è sempre una rotazione
b)Annota le procedure eseguite e le osservazioni
c)Cambia l’ordine con cui sono state applicate le due trasformazioni e controlla se i risultati
non cambiano (proprietà commutativa)
15
ESERCITAZIONE N.5
Prodotto di una simmetria assiale e di una traslazione
A)
Scegli il vettore di traslazione e l’asse di simmetria in modo che siano tra di loro
perpendicolari
Verifica che in questo caso Il prodotto di una simmetria assiale e di una traslazione è ancora
una simmetria assiale ,avente per asse
di simmetria l’asse del segmento congiungente una qualunque coppia di punti
corrispondenti (retta puntualmente unita)
Annota le procedure eseguite e le osservazioni
Cambia l’ordine con cui sono state applicate le due trasformazioni e controlla se i risultati
non cambiano (proprietà commutativa)
B) Scegli un altro vettore di traslazione o un altro asse di simmetria in modo che non sia più
rispettata la condizione di perpendicolarità
Verifica che in questo caso le coppie di punti corrispondenti non hanno lo stesso asse e che
non è possibile far coincidere un punto con il suo trasformato ( non esistono punti uniti)
Annota le procedure eseguite e le osservazioni
Cambia l’ordine con cui sono state applicate le due trasformazioni e controlla se i
risultati non cambiano (proprietà commutativa)
16
STUDIO DEGLI ELEMENTI UNITI IN UNA ISOMETRIA PIANA
Lavoro di gruppo per studenti della TERZA o della QUARTA CLASSE di Liceo scientifico sperimentale (Piano
Nazionale Informatica)
La classe va suddivisa in tre gruppi , uno per tipologia di trasformazione isometrica : Traslazione- RotazioneSimmetria Assiale
Ogni gruppo è suddiviso in sottogruppi , in base al numero degli studenti e delle postazioni utilizzabili nel
laboratorio di Informatica.
Il lavoro si esplica in 3 fasi:
Prima fase: raccolta delle osservazioni, sulla base di schede opportunamente predisposte ( in laboratorio )
Seconda fase: confronto dei risultati tra i sottogruppi e compilazione della scheda o stesura di una
relazione da parte di ciascun gruppo ( in laboratorio o in classe)
Terza fase : presentazione delle relazioni ( in laboratorio)
Obiettivi
Favorire la concettualizzazione di punto unito e retta unita
Comprendere la differenza tra retta puntualmente unita e retta globalmente unita
Determinare gli eventuali elementi uniti nelle principali isometrie
Prerequisiti
Conoscenza delle principali isometrie del piano ( traslazione, simmetria assiale, rotazione, simmetria
centrale) e delle equazioni che le definiscono in Geometria analitica
Conoscenza delle equazioni di una trasformazione lineare
Conoscenza delle procedure di base e dei principali comandi di Cabri
17
SCHEDA N° 1
TRASLAZIONE
Costruzione degli oggetti corrispondenti
Seleziona Punto e traccia:
Un punto A
Un punto B
(ricordati di assegnare immediatamente il nome agli oggetti costruiti)
Seleziona vettore e traccia il vettore
Seleziona Punto e traccia un punto P
Seleziona Punto e traccia un punto C
Seleziona Circonferenza e traccia un circonferenza di centro C e raggio arbitrario
Seleziona Punto su un oggetto e traccia un punto M sulla circonferenza
Seleziona Retta e traccia la retta CM assegnandole il nome r
Seleziona Punto su un oggetto e traccia un punto R sulla retta CM
Seleziona Traslazione e costruisci, nella traslazione di vettore
il punto P’ corrispondente di P
la retta r’ corrispondente di r
il punto C’ corrispondente di C
il punto R’ corrispondente di R
:
Ricerca degli elementi uniti
Punti uniti
Trascina P sullo schermo e osserva come varia P’
Esiste qualche posizione di P tale che P’ coincida con P? ( punto unito)
Rette unite
Fai variare la direzione di r trascinando M sulla circonferenza e osserva come varia la posizione di r’
………………………………………………………………………………………………………………………………………………………..
Quale deve essere la direzione di r affinché r’ coincida con r? (retta unita) Questo avviene per una sola direzione e per
più direzioni?
………………………………………………………………………………………………………………………………………………………………………..
………………………………………………………………………………………………………………………………………………………………………..
18
Le due rette restano coincidenti facendo variare la posizione di C?
………………………………………………………………………………………………………………………………………………………………………..
Quando r ‘ coincide con r, anche il punto R’ coincide con il punto R?
………………………………………………………………………………………………………………………………………………………………………..
CONCLUSIONI
Traslazione associata
al vettore (a,b)
Congetture
Dimostrazioni
equazioni
ammette punti uniti?
In caso affermativo
quali?
Ammette rette
puntualmente unite ?
In caso affermativo
quali?
Ammette rette
globalmente unite ? In
caso affermativo quali?
19
SCHEDA N° 2
Rotazione
Seleziona Punto e traccia un punto C
Seleziona Numero e scegli un numero per l’angolo θ di rotazione (CTRL-U per l’unità di misura)
Seleziona Punto e tracciare un punto P
Seleziona Retta e traccia una retta assegnandole il nome r
Seleziona Rotazione e costruisci il punto P’ corrispondente di P nella rotazione di centro C e angolo θ
Seleziona Rotazione e costruisci la retta r’ corrispondente di r nella rotazione di centro C e angolo θ
Sposta il punto P e cerca di fargli <<catturare>> P’. In quale caso i due punti si sovrappongono?
………………………………………………………………………………………………………………………………………………………………
Sposta la retta r e osserva come varia r’. Le due rette possono sovrapporsi?
………………………………………………………………………………………………………………………………………………………………
Ripeti le prove per diversi valori di θ.
Cosa succede assegnando a θ un’ampiezza di 180°?
……………………………………………………………………………………………………………………………………………………………….
……………………………………………………………………………………………………………………………………………………………….
……………………………………………………………………………………………………………………………………………………………….
CONCLUSIONI
Rotazione(θ≠180°)
Congetture
Dimostrazioni
Rotazione
equazioni
( θ=180°)
ovvero
Simmetria
centrale
ammette punti uniti? In
caso affermativo quali?
ammette
punti
uniti? In
caso
affermati
vo quali?
Congetture
Dimostrazioni
20
SCHEDA N° 3
Simmetria assiale
Costruzione degli oggetti corrispondenti
Seleziona Retta e traccia una retta assegnandole il nome a
Seleziona Punto e traccia un punto P
(ricordati di assegnare immediatamente il nome agli oggetti costruiti)
Seleziona Punto su un oggetto e traccia un punto C sulla retta a
Seleziona Circonferenza e traccia un circonferenza di centro C e raggio arbitrario
Seleziona Punto su un oggetto e traccia un punto M sulla circonferenza
Seleziona Retta e traccia la retta CM assegnandole il nome r
Seleziona Punto su un oggetto e traccia un punto R sulla retta CM
Seleziona Simmetria assiale e costruisci ,nella simmetria rispetto ad a
il punto P’, corrispondente di P
Ricerca degli elementi uniti
Punti uniti
Trascina P sullo schermo e osserva come varia P’
Esiste qualche posizione di P tale che P’ coincida con P? ( punto unito)
Rette unite
Fai variare la direzione di r trascinando M sulla circonferenza e osserva come varia la posizione di r’
……………………………………………………………………………………………………………………………………………………………………...
Quale deve essere la direzione di r affinché r’ coincida con r? (retta unita) Questo avviene per una sola direzione e per
più direzioni?
………………………………………………………………………………………………………………………………………………………………………………………
………………………………………………………………………
Le due rette restano coincidenti facendo variare la posizione di C?
………………………………………………………………………………………………………………………………………………………
Quando r ‘ coincide con r, anche il punto R’ coincide con il punto R?
………………………………………………………………………………………………………………………………………………………………………..
21
CONCLUSIONI
Simmetria assiale rispetto
Congetture
Dimostrazioni
alla retta a di equazione
y =mx , dove m = tan α
equazioni
ammette punti uniti? In
caso affermativo quali?
Ammette rette
puntualmente unite ? In
caso affermativo quali?
Ammette rette
globalmente unite ? In
caso affermativo quali?
22
OMOTETIE E SIMILITUDINI
Obiettivi
Obiettivi
approfondire l’uso degli strumenti di Cabri
costruire le omotetie;
verificare le proprietà delle omotetie;
individuare gli invarianti delle omotetie .
costruire le similitudini come prodotto di un’omotetia e di una isometria
verificare le proprietà delle similitudini
individuare gli invarianti delle similitudini
Prerequisiti
Procedure di base dell’ambiente Cabri
Concetto di traslazione, simmetria centrale, rotazione, simmetria assiale
23
OMOTETIA
In un piano si chiama Omotetia di centro O e di rapporto k (numero reale non nullo ), la
corrispondenza biunivoca tra i punti del piano la quale:
al punto O associa il punto stesso,ad ogni altro punto A associa il punto A' , appartenente alla retta
OA, tale che il rapporto tra i segmenti OA’ e OA sia uguale a k
Un’omotetia di centro O(0;0) è definita dalle equazioni
Un’omotetia di centro C(p,q) è definita dalle equazioni
A)Dalle equazioni alla costruzione delle figure corrispondenti
Omotetia di centro e rapporto assegnati
Esempio
Proposta di lavoro
a)
Costruzione delle figure corrispondenti
Costruisci un triangolo, una retta e una circonferenza
Scegli il centro O dell’omotetia
Scegli il rapporto k≠1
Seleziona Omotetia
Costruisci l le figure che , nell’omotetia così determinata, corrispondono agli oggetti precedentemente
costruiti
Fa i variare k scegliendo anche valori negativi e osserva i risultati
Cosa succede se assegni a k il valore 1 o -1?
24
b)Verifica delle proprietà
Con l’ausilio degli strumenti di Cabri verifica se la trasformazione conserva
□ Le ampiezze degli angoli
□ La pendenza delle rette
□ Il verso di percorrenza del contorno delle figure
Confronta le lunghezze delle due circonferenze e dei lati dei due triangoli corrispondenti
Che cosa osservi?...........................................................................................................................
Confronta le aree dei due triangoli corrispondenti
Che cosa osservi?...........................................................................................................................
c)Elementi uniti
Verifica che O è l’unico punto unito ( prova a far coincidere un punto con il suo omotetico) e che le rette
uscenti da O sono rette unite (globalmente)
d)Dagli elementi corrispondenti alle equazioni
Assegnati i due punti A(2;3) e A’ (-2,1) esiste
un’omotetia che porta A in A’ ?
In caso affermativo, è unica ?
Per definizione di omotetia di centro O e rapporto k il centro
O deve appartenere alla retta congiungente A con A’.
Non essendo noto il rapporto k tra i segmenti OA’ e OA, è
evidente che O può assumere infinite posizioni
Le omotetie che portano A in A’ sono pertanto infinite
L’omotetia non è i univocamente determinata dalla conoscenza di due punti corrispondenti
Assegnati due segmenti, AB e A’B’, esiste un’omotetia che porta AB in A’ B’?
In caso affermativo, è unica ?
Per definizione di omotetia di centro O e rapporto k, il segmento il centro O deve appartenere alle due rette A A’ e
B B’mentre il rapporto tra i segmenti OA’ e OA deve essere uguale a quello tra OB’ e OB
Spiega perché:
se AB e A’B’ non sono paralleli non possono essere omotetici
se i due segmenti sono paralleli esiste una e una sola omotetia che trasforma l’uno nell’altro
Costruisci due segmenti tra loro paralleli
Determina il centro e il rapporto di omotetia
Scrivi le equazioni dell’omotetia così determinata
25
SIMILITUDINE
Si definisce similitudine una corrispondenza biunivoca tra i punti del
piano ottenuta dall’applicazione sccessiva di una Omotetia e di una
Isometria
La similitudine sarà diretta o inversa a seconda che l’isometria
applicata sia diretta o inversa
Una similitudine diretta è definita dalle
equazioni
L’omotetia è essa stessa un caso particolare di similitudine
Una similitudine inversaè definita dalle equazioni
a)Dalle equazioni alla costruzione delle figure
corrispondenti
Similitudine ottenuta dalla composizione di
un’omotetia e una rotazione
Esempio
Porta ulteriori esempi sia costruendo altre
figure,sia scegliendo altri tipi di isometria
b)Verifica delle proprietà
Con l’ausilio degli strumenti di Cabri.
verifica se la trasformazione conserva
□ Le ampiezze degli angoli
□ La pendenza delle rette
□ Il verso di percorrenza del contorno delle figure
Confronta le lunghezze delle due circonferenze e dei lati dei due triangoli corrispondenti
Che cosa osservi?...........................................................................................................................
Confronta le aree dei due triangoli corrispondenti
Che cosa osservi?...........................................................................................................................
c)Dalle figure corrispondenti alle equazioni
a)I due triangoli rappresentati in figura sono evidentemente simili. Sono anche omotetici?
Prova trasformare l’uno nell’altro utilizzando gli strumenti di Cabri
Determina analiticamente le equazioni della similitudine che trasforma A in A’, B in B’, C in C’
Confronta i risultati ottenuti con i due metodi
26
b)Assegnate due circonferenze , la prima col centro nell’origine e raggio 1, la seconda col centro nel punto
C(5;0) e raggio 2, esiste un’omotetia che trasforma l’una nell’altra?
In caso affermativo, è unica ?
Costruzione:
In questo caso è possibile avere due coppie di punti
corrispondenti : i due centri e una coppia di punti P e P’ tali
che sia OP parallelo a OP’
Traccia le due circonferenze
Seleziona Coordinate ed equazioni per visualizzare le
due equazioni
Seleziona Punto su un oggetto e scegli un punto P sulla
prima circonferenza
Seleziona Segmento e traccia il segmento OP
Seleziona Parallela e traccia la retta passante
per C e parallela ad OP
Seleziona Intersezione di oggetti e costruisci i
due punti di incontro, P e P’, tra la seconda
circonferenza e la retta precedentemente
costruita
Seleziona Intersezione di oggetti e costruisci i due punti di incontro, O1 e O2 Seleziona Intersezione
di oggetti e costruisci i due punti, O1 e O2 , in cui l’asse x incontra le rette PP’ e PP” rispettivamente
Seleziona Omotetia e verifica che le due circonferenze si corrispondono:
Nell’omotetia di centro O1 e rapporto 2
Nell’omoteta di centro O2 e rapporto -2
Calcolo
Ricostruisci il procedimento precedente con i metodi della Geometria Analitica .Determina le coordinate di
O1 e O2 e scrivi le equazioni delle due omotetie
27
OMOLOGIA AFFINE E AFFINITA’
Obiettivi
approfondire l’uso degli strumenti di Cabri
costruire le omologie affini;
verificare le proprietà delle omologie affini;
costruire le affinità come prodotto di una omologia affine e di una similitudine;
individuare gli invarianti delle affinità.
collegare le proprietà geometriche con la natura delle equazioni dell’affinità
Prerequisiti
Uso dei principali strumenti dell’ambiente Cabri
Definizione di omologia affine e di affinità
Conoscenza delle equazioni di un’affinità
Concetto di rapporto di affinità
Concetto di prodotto operatorio
28
OMOLOGIA AFFINE
Dato un piano, una sua retta r, e un numero reale
k, una direzione δ non parallela ad r, si costruisca
una corrispondenza tra i punti di π operando nel
modo seguente
Ad ogni punto P si fa corrispondere il punto P’
tale che
La retta PP’ abbia direzione δ, P’ appartenga
allo stesso semipiano di P se k è positivo, sul
semipiano opposto se k è negativo, e, detto Q il punto comune a PP’ e ad r, risulti
P' Q
| k |
PQ
Nel caso in cui l’asse dell’omologia coincida con l’asse delle x, le equazioni della trasformazione
assumono la forma
x' x by
ky
y'
Si verifica facilmente che
Ogni punto U della retta r è unito
Se P descrive la retta AU, il suo corrispondente P’ descrive la retta A’U
infatti, costruita tra le rette AU e A’U una corrispondenza di Talete,
dalle uguaglianze
AB BU
A' B
PQ QU P' Q
si deduce che
AB
PQ
A' B P' Q
quindi P’ è proprio il corrispondente di P nella trasformazione considerata
La trasformazione così definita prende il nome di omologia affine ovvero affinità omologica , di
asse r
direzione δ
rapporto o caratteristica k
PROPRIETA’
1) La retta r è puntualmente unita, le rette del fascio di direzione δ sono globalmente
unite
2) Punti corrispondenti giacciono su una retta parallela a δ
3) Rette corrispondenti si incontrano sull’asse o sono parallele all’asse.
4) La trasformazione subordina su ogni retta parallela a δ un’omotetia
29
OMOLOGIA AFFINE SPECIALE
La precedente definizione di omologia affine si può generalizzare anche nel caso in cui la
direzione δ sia parallela all’asse r.In tal caso si parla di affinità omologica speciale
L’affinità omologica speciale è la trasformazione che
assegnata una retta r ( asse dell’omologia) e un numero reale k ( rapporto dell’omologia),
ad ogni punto P del piano fa corrispondere un punto P’ tale che
La retta PP’ sia parallela ad r
Indicata con H la proiezione di P su r, sia
PP'
k
PH
1. La retta r è puntualmente unita, le rette parallele ad r sono globalmente unite
2. Punti corrispondenti giacciono su una retta parallela ad r
3. Rette corrispondenti si incontrano sull’asse o sono parallele all’asse
inoltre
4. La trasformazione subordina su ogni retta parallela . a δ una traslazione
Il vettore di traslazione si ottiene assoggettando il vettore PH ad una rotazione di 90* e ad
un’omotetia di centro P e rapporto k
30
Scheda di lavoro OMOLOGIA AFFINE
A)Costruzione del punto P’ corrispondente di P nell’affinità omologica di asse r, direzione δ, rapporto k
Disegna l’asse r
Disegna il vettore δ
Scegli il valore di k
Traccia un punto P
Traccia la retta per P parallela a δ (strumento retta parallela…)
Evidenzia il punto Q in cui incontra l’asse r (Punto- intersezione di due oggetti)
Costruisci il punto omotetico di P nell’omotetia di centro Q e rapporto k ( strumento: trasformazioniomotetia)
Cambia la direzione di δ e il valore di k , assegnando anche valori negativi,per osservare come varia la
posizione di P’
B)Macrocostruzione
oggetti iniziali
la retta r
il vettore δ
il numero k
il punto P
oggetti finali: il punto P’
Definizione della MACRO “Omologia Affine”
Costruisce il corrispondente di un punto P in un’Omologia affine quando si conoscone: l’asse r, la direzione δ, il
rapporto k.
Selezionare nell’ordine : r, δ,k,P
C)Utilizzo della MACRO
1)Utilizzando la Macro Omologia Affine costruirsci i corrispondenti A’ e B’ di due punti A e B (rispettivamente)
2)Osserva il comportamento delle rette AB e A’B’ per diverse posizioni dei punti
3)Verifica che la retta r è retta puntualmente unita mentre le rette parallele a δ sono globalmente unite
Esercizi
1) Costruire il punto P’ corrispondente di P( -1;2) in un’omologia affine essendo noti l’asse ( l’asse delle x)
e una coppia di punti corrispondenti .A(1:1) e A’(3;3)
Scrivere le equazioni dell’omologia e verificare analiticamente i risultati
2) Costruire il punto P’ corrispondente di P in un’omologia affine speciale essendo noti l’asse e il rapporto
Verificare che l’omologia affine speciale conserva il valore dell’area delle figure
31
AFFINITA’
Il prodotto di un’omologia affine e di una similitudine dà luogo ad una trasformazione lineare invertibile che
conserva
L’allineamento
Il parallelismo
Il rapporto tra le lunghezze di segmenti tra loro paralleli ( ovvero il rapporto semplice di tre punti allineati)
Il rapporto delle aree delle figure
Questa trasformazione prende il nome di Affinità ed è la più generale trasformazione lineare invertibile
32
Scheda di lavoro AFFINITA’
Costruire un’affinità come prodotto di un’omologia affine e di una similitudine ( in particolare un’isometria)
A) 1)Traccia la retta s di equazione y= 2 e scegli due punti , P e Q, su di essa
Utilizza la costruzione A)o la Macro “Omologia Affine “per costruire i corrispondenti di P e di Q ( rispettivamente
P’ e Q’) nell’omologia Ω1 avente
per asse l’asse x
direzione parallela alla bisettrice del primo e terzo quadrante
rapporto k=3
2)Applica al punto P’ e al punto Q’ una traslazione T associata al vettore di componenti (0;-4) ottenendo i punti P” e
Q”. In questo modo si costruisce a trasformazione Ω = T* Ω1
3)Osserva che la retta s è unita nella trasformazione Ω
4)Stabilisci se si tratta di una retta globalmente unita o puntualmente unita e fornisci una motivazione della tua
risposta
5) Scrivi le equazioni delle tre trasformazioni ed effettua una verifica analitica dei risultati
B) Verifica analiticamente e graficamente che l’affinità ottenuta applicando l’omologia Ω 1 precedentemente definita
e, successivamente, la simmetria rispetto alla bisettrice del primo e terzo quadrante, ammette come retta unita la
suddetta bisettrice.
Stabilisci se si tratta di una retta globalmente unita o puntualmente unita e fornisci una motivazione della tua
risposta
C) 1)Applica la trasformazione Ω1al quadrato di vertici O(0,0) A(0,1) , B(1,1), C(1,0)
2) Applica al nuovo quadrilatero O’A’B’C’ un’omotetia ottenendo il quadrilatero O”A”B”C”
3) Applica al quadrilatero O”A”B”C” un’isometria ( di tua scelta) ottenendo il quadrilatero O”’A”’B’”C”’
4)Confronta il quadrilatero di partenza con quello d’arrivo, in particolare confronta i valori delle aree e dei
perimetri
33
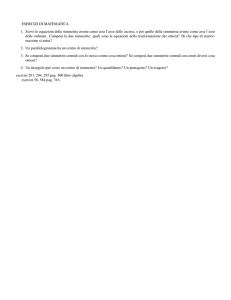
SIGNIFICATO FISICO DELLE TRASFORMAZIONI
Le isometrie , intuitivamente, sono associate ai possibili movimenti di un corpo rigido, come suggeriscono i
loro nomi. Nel caso delle figure piane i suddetti movimenti possono avvenire tutti su un piano, con
eccezione della simmetria assiale, che in effetti consiste in una rotazione della figura ( o anche in un
ribaltamento del piano ) attorno ad una retta Questo movimento , come illustra la figura seguente,
eseguita con Cabri3D, avviene in una terza dimensione
Se invece vogliamo un’interpretazione fisica di altre trasformazioni, come l’omotetia o l’omologia affine, è
spontaneo pensare alla proiezione di un oggetto, una figura F, mediante un fascio di raggi luminosi .
E’ possibile costruire con Cabri alcune figure che simulano questa genesi spaziale delle trasformazioni
piane
Se i raggi provengono da una sorgente puntiforme e la proiezione avviene su piano parallelo a quello della
figura, si ottiene una OMOTETIA . Immaginando di avvicinare i due piani ,fino a sovrapporli, ritroveremo
l’omotetia come corrispondenza tra punti dello stesso piano.Per particolari posizioni dei due piani
l’omotetia si riduce ad una simmetria centrale o all’identità
34
E’ interessante osservare che , se la sorgente si allontana verso l’infinito, i raggi di luce possono essere
considerati paralleli, come i raggi provenienti dal sole
L’omotetia si riduce allora ad una traslazione.
Questo risultato è in accordo col fatto che la traslazione può essere
considerata un a particolare omotetia corrispondente al valore
k=1 ,anche se in tal caso il centro dell’omotetia, ovvero il punto
unito, non è più determinabile, a meno che non si attribuisca un
valore infinito alle sue coordinate
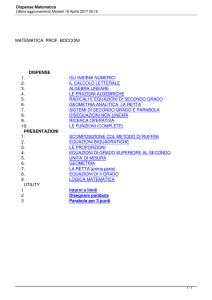
Immaginiamo ora che la proiezione non avvenga più su un piano parallelo alla figura, ma su un piano
incidente, che quindi ha in comune una retta col piano iniziale;
un esempio potrebbe essere l’ombra di una finestra sul pavimento della stanza
I raggi luminosi sono tra loro paralleli (sorgente lontana).
Esiste una quarta eventualità ; sorgente a distanza finita ( fascio di raggi incidenti) e proiezione su un piano
non parallelo alla figura.
In questo caso si ottiene una trasformazione che prende il nome di Omologia ma esula dalla nostra
trattazione . E’ facile verificare che non si tratta di un’affinità poiché non conserva il parallelismo tra rette.
Il terzo caso corrisponde invece alla trasformazione che abbiamo chiamato Affinità omologica o Omologia
affine (in questo caso si deve pensare di far ruotare il piano della figura fino a sovrapporlo al piano di
proiezione)
Infatti in:
La retta u comune ai due piani è puntualmente unita ( asse dell’omologia affine)
I punti corrispondenti appartengono a rette aventi una direzione prefissata
Su ciascuna di queste rette la trasformazione subordina un’omotetia avente il centro nel punto in
cui la retta incontra l’asse u dell’omologia
35
Come casi particolari si ottiene la simmetria assiale e l’identità
Una volta costruita figura F’, corrispondente di F nell’omologia affine, possiamo applicare ad essa una
similitudine nel piano , o in particolare, un’isometria,
In questo modo otterremo tutte le possibili trasformazioni della figura F, che conservano l’allineamento e il
parallelismo , cioè le Affinita’
36
E SE CONSIDERASSIMO LA QUARTA DIMENSIONE, CIOÈ IL TEMPO?
In Fisica, specialmente nelle teorie relativistiche, il tempo à la quarta dimensione dello Spazio-tempo in cui
si studiano gli eventi.
Poiché ad ogni posizione nello spazio è associata una terna di coordinate (x,y,z) e ad ogni istante è
associato un numero t, è possibile misurare (si usa spesso il termine osservare come sinonimo) l’evento
mediante 4 coordinate . Per fare ciò l’osservatore deve dunque essere munito di un orologio e di un
righello (che supponiamo di estensione infinita, o perlomeno sufficiente a misurare tutti gli eventi che
vorremo) che gli permettono di determinare posizione ed istante associati ad ogni evento.
In generale si possono confrontare i <<punti di vista>> di ciascun osservatore mediante le formule di
trasformazione, proprio come in geometria si studiano le proprietà delle figure rispetto a due riferimenti
diversi, ovvero si confrontino due figure corrispondenti in una trasformazione
Nella Fisica classica queste trasformazioni sono le Trasformazioni Galileiane, rispetto alle quali il tempo è
un invariante (La misura del tempo, coordinata temporale di un determinato evento, dà lo stesso risultato
per tutti gli osservatori )
Se i due osservatori sono fermi l’uno rispetto all’altro, le trasformazioni sono vere e proprie trasformazioni
geometricheSe invece i due osservatori si muovono l’uno rispetto all’altro con
una velocità costante , definta da un vettore a 3 componenti
(ux,uy,uz) le trasformazioni devono tener conto delle leggi della
fisica
Chiamiamo
OP spostamento assoluto OP' spostamento relativo
OO' spostamento di trascinamento
Applicando la regola della somma vettoriale, possiamo affermare che OP OO'O' P ovvero
O' P OP OO'
e, passando alle rispettive componenti:
A queste equazioni va aggiunta la relazione di uguaglianza delle coordinate temporali
t’=t
37
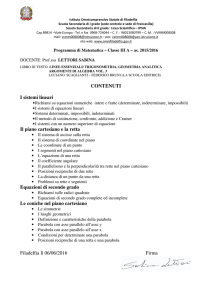
Lo studio può essere semplificato se si suppone che due delle coordinate spaziali ( per es. y e z) rimangano
costanti nel tempo e quindi ad ogni evento resta associata una coppia di numeri reali (x;t) .
Il moto di una particella diventa una successione di eventi (x,t) rappresentabili in un piano in cui l’asse
delle x è l’asse delle ascisse e l’asse delle t è quello delle ordinate. Il luogo geometrico dei punti (x;t) si
chiama linea universo della particella
Gli incrementi ∆x e ∆t rappresentano,
rispettivamente , la distanza spaziale e la
distanza temporale di due eventi
I punti che appartengono alle rette
parallele all’asse x corrispondono ad
eventi simultanei ( distanza temporale
nulla)
x' x vt
t
t'
Le equazioni della trasformazione si riducono a
LE TRASFORMAZIONI GAILEIANE COME CASO PARTICOLARE DI TRASFORMAZIONI LINEARI
Nell’ambito della teoria delle trasformazioni lineari del piano, le trasformazioni galileiane possono essere
classificate come un caso particolare di affinità omologica speciale.
Infatti dall’invarianza del tempo, si deduce che le rette di equazione t = costante si trasformano in se
stesse ( rette globalmente unite) , mentre la retta di equazione t =0 è luogo di punti uniti ( retta
puntualmente unita)
La trasformazione è pertanto un’affinità omologica speciale di asse l’asse delle x.Il rapporto
PP'
v
t
è la caratteristica dell’omologia .
Possiamo quindi servirci dell’ambiente Cabri per un approccio visivo allo studio dei moti relativi in Fisica,
In questo modo anche gli invarianti , nel loro significato fisico, possono essere studiati con il linguaggio della
Geometria.
In particolare può essere utile osservare come la lunghezza di un segmento sia in effetti la
distanza spaziale tra due eventi simultanei La sua invarianza è legata cioè all’invarianza del tempo.
Questa osservazione pone le basi per il passaggio dalla Relatività classica alla Relatività Ristretta
( trasformazioni di Lorentz-Einstein)
38
ESERCITAZIONE
A)Costruzione degli assi
punto O . punto su un oggetto ( sull’asse x)
assex: punto su un oggetto ( asse x); vettore O=>
asse t: punto su un oggetto ( asse y; vettore O=>
Spessore ( scegli spessore)
assegnare le rispettive etichette
punto
punto
Costruzione di P’
Linea universo di O’:retta r di equazione x= vt ( retta per O)
Punto P (punto)
retta parallela per P all’asse x; intersezioni K e H con l’asse y e con l’asse x;
vettore H=>K
Traslare il punto P secondo il l vettore HK ( punto P’)
Definizione della Macro TrasfGalileo
Oggetti iniziali : il punto O, l’asse y, la retta r, il punto P
Oggetti finali il punto P’
Esercitazione
Un punto P si muove rispetto ad entrambi gli osservatori O e O’
L’evento A(xA,tA) , rappresenta l’inizio del moto e l’evento B(xB,tB), la fine, nel riferimento di O
Traccia il punto A e il punto B
Definisci il segmento AB
Traccia il punto P appartenente al segmento AB ( punto su un oggetto)
Utilizzando la Macro TrasfGalileo costruisci i corrispondenti dei punti A, B, P , rispettivamente.
Rispondi ai seguenti quesiti :
I due osservatori concordano sulla durata del fenomeno?( distanza temporale dei due eventi, inizio e fine del moto )
I due osservatori concordano sulla distanza percorsa da P?( distanza spaziale dei due eventi)
I due osservatori concordano sul valore della velocità di P ?( rapporto tra la distanza spaziale e la distanza temporale)
Fai variare la pendenza del segmento AB e soffermati sui due casi particolari: AB parallelo all’asse y , AB parallelo ad
r.
Che cosa osservi ? Come te lo spieghi ?
39
40