C.d.L. "Scienze della Formazione Primaria"
Corso Integrato di Geometria e Algebra
Modulo di GEOMETRIA
A. Gimigliano, A.A. 2009/10
Note supplementari per il corso
INDICE
0. INTRODUZIONE.
1. LA GEOMETRIA EUCLIDEA.
2. GEOMETRIA EUCLIDEA PIANA.
2.1 Rette parallele tagliate da una trasversale e angoli da loro formati.
2.2 Poligoni.
2.3 Quadrilateri Notevoli.
2.4 Il Teorema di Pitagora.
3. GEOMETRIA EUCLIDEA SOLIDA.
4. GEOMETRIA ANALITICA.
4.1 Geometria analitica nel piano.
4.2 Geometria analitica nello spazio.
4.3 Coordinate polari e sferiche (cenni).
2
0. INTRODUZIONE
Queste brevi note si integrano con il testo del corso [Id] , di cui sono un complemento. Gli
studenti devono quindi fare riferimento a quel testo per tutte le nozioni di base; quelle che si
trovano qui, e che integrano quanto presente in quel testo, seguono parti del corso presentate a
lezione.
[Id] : Monica Idà. Note di Geometria (per Scienze della Formazione Primaria). Pitagora Editrice,
Bologna (2001).
1. LA GEOMETRIA EUCLIDEA
Una edizione degli Elementi.
Euclide
Gli elementi fondamentali della geometria euclidea sono il punto, la retta, ed il piano. Sebbene
nel testo di Euclide si diano delle definizioni di questi enti, il punto di vista moderno sulla
geometria euclidea è quello di porli come termini non definiti.
Si definiscono a partire da essi altre nozioni, quali ad esempio:
• Ogni punto P su una retta la divide in due parti, ciascuna delle quali si dice semiretta: P si
dice origine o estremo delle due semirette.
• La parte di retta delimitata da due punti è detta segmento.
• Due rette nello spazio si dicono complanari quando giacciono sullo stesso piano e sghembe
se non c'è un piano che le contiene.
Di seguito si riportano i cinque postulati di Euclide:
1. Tra due punti qualsiasi è possibile tracciare una ed una sola retta.
3
2.
3.
4.
5.
Si può prolungare un segmento oltre i due punti indefinitamente.
Dato un punto e una lunghezza, è possibile descrivere un cerchio.
Tutti gli angoli retti sono uguali.
Se una retta taglia altre due rette determinando dallo stesso lato angoli interni la cui somma
è minore di quella di due angoli retti, prolungando le due rette, esse si incontreranno dalla
parte dove la somma dei due angoli è minore di due retti.
Dagli assiomi si possono dedurre delle relazioni di incidenza fra punti, rette e piani. Ad esempio:
• Per un punto passano infinite rette
• Per due punti distinti passa una ed una sola retta
• Data una retta nel piano ed un punto fuori da essa, per esso passa una ed una sola parallela
alla retta data. (Questa affermazione è equivalente al postulato n.5 di Euclide).
• Per una retta nello spazio passano infiniti piani
• Per tre punti non allineati nello spazio passa un solo piano
2. GEOMETRIA EUCLIDEA PIANA
2.1 Rette parallele tagliate da una trasversale e angoli da loro formati.
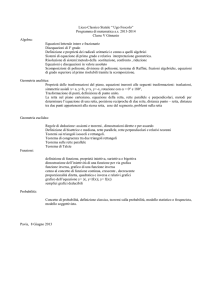
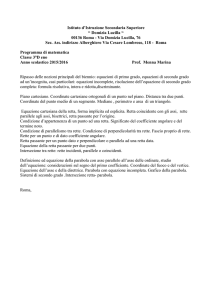
Date due rette parallele r, s nel piano, tagliate da un'altra retta trasversale t, si formano otto
angoli (quattro fra r e t e quattro fra s e t), come in figura. Fra questi angoli si hanno le
seguenti relazioni:
α1 = α2 , β1 = β2 , α3 = α4 , β3 = β4 , perché angoli opposti al vertice.
α2 e β3 , α3 e β2 sono supplementari per il V postulato di Euclide (infatti le rette r,s non si
incontrano né da un lato né dall'altro, quindi né α2 + β3 né α3 + β2 possono essere minori
di 180°, quindi avremo α2 + β3 = α3 + β2 = 180°).
α2 = α3 ; perché entrambi supplementari a β3 ;
β2 = β3 ; perché entrambi supplementari a α3 ;
4
2.2 Poligoni.
Vedi [Id] per definizioni. Da notare che per un errore l'enunciato sui poligoni regolari di pag.14 in
[Id ]va così modificato:
Per ogni numero intero positivo n≥3 , esiste un poligono regolare di n lati
Per lo studio degli angoli interni dei poligoni un metodo alternativo a quanto visto in [Id] è il
seguente.
Per i triangoli, vediamo che la somma degli angoli interni di un triangolo è pari a 180° (un angolo
piatto. Consideriamo un triangolo ABC e tracciamo la parallela al lato BC passante per A:
Si ha che gli angoli γ, γ' e β, β' sono congruenti in quanto alterni interni fra due rette parallele
tagliate dalle rette trasversali AC e AB. Poiché la somma degli angoli β ', α, γ ' è pari ad un
angolo piatto (180°), anche la somma di β , α, γ lo è.
Dato ora un poligono qualsiasi, prendiamo un suo punto interno P e uniamolo con tutti i vertici del
poligono, che verrà così suddiviso in tanti triangoli quanti sono i suoi lati.
Avremo così che la somma degli angoli interni di tutti i triangoli in figura è pari a tanti angoli piatti
quanti sono i lati del poligono. Così facendo abbiamo considerato anche tutti gli angoli con vertice
in P, che formano un angolo giro. Se vogliamo solo la somma degli angoli interni del poligono,
dovremo sommare tutti quelli dei triangoli, meno quelli in P, e cioè meno un angolo giro (= 2 angoli
piatti). Otteniamo così la formula desiderata:
La somma degli angoli interni di un poligono è pari a
tanti angoli piatti quanti sono i lati, meno due.
Quindi se il poligono ha n lati, la formula si può scrivere come: (n - 2).180° .
5
2.3 Quadrilateri notevoli.
Abbiamo visto vari tipi di quadrilateri (vedi [Id]); diamo un cenno alle loro proprietà principali:
- Trapezio: E' un quadrilatero che ha (almeno) due lati paralleli: Ad esempio:
Trapezio Scaleno
Trapezio rettangolo
Trapezio isoscele
- Parallelogramma: E' un quadrilatero con due coppie di lati paralleli.
Esempi di parallelogrammi
In un parallelogramma i lati opposti e gli angoli opposti sono congruenti:
Infatti, tracciando la diagonale AD, si vede che i triangoli ABD e ACD hanno il lato AD in
comune, e gli angoli CAD e BDA , BAD e ADC congruenti in quanto alterni interni fra due rette
parallele tagliate dalla trasversale AD. Quindi i triangoli sono congruenti per il secondo criterio di
congruenza dei triangoli e quindi si ha:
AC = BD , CD = AB e
A C D= A B D .
In un parallelogramma le diagonali si dividono a metà:
Per esercizio, dimostrare l'enunciato sulle diagonali provando che i triangoli AHB e CHD sono
congruenti (utilizzando anche la proprietà vista sopra sui lati opposti).
6
- Rettangoli: Un rettangolo è un quadrilatero con quattro angoli retti.
Esempi di rettangoli
Un rettangolo è un particolare parallelogramma, infatti avere i quattro angoli retti implica (per il
V postulato) che i lati sono a due a due paralleli. Quindi i rettangoli hanno le proprietà già viste per
i parallelogrammi, ed in più:
In un rettangolo, le due diagonali sono congruenti.
Infatti basta mostrare che i triangoli ACD e CBD sono congruenti. Si ha AC = BD per le proprietà
dei parallelogrammi, CD è in comune e gli angoli retti sono congruenti, quindi si conclude per il I
criterio di congruenza dei triangoli. Infatti in particolare averemo AD = CB.
- Rombi: Un rombo è un quadrilatero avente i quattro lati uguali.
Esempi di rombi
In un rombo le diagonali sono perpendicolari.
7
Esercizio: Dimostrare la proprietà precedente. Suggerimento: dimostrare che i quattro triangoli in
cui è diviso il rombo sono congruenti. Di conseguenza i quattro angoli in H sono uguali e quindi
retti.
- Quadrati: Un quadrato è un quadrilatero con quattro lati e quattro angoli uguali.
Per i quadrati, avendo sia gli angoli retti che i quattro lati uguali, valgono sia le proprietà dei rombi
che quelle dei rettangoli.
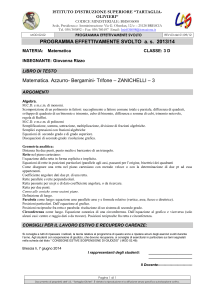
Osservazione: Un quadrato è sia un (particolare) rombo che un (particolare) rettangolo. Allo stesso
modo sia un rombo che un rettangolo sono dei particolari parallelogrammi, e si ha anche che ogni
parallelogramma è un particolare trapezio.
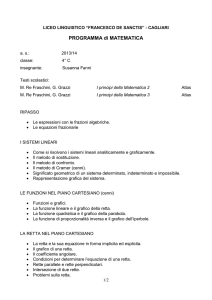
La seguente figura mostra come gli insiemi dei quadrilateri appena visti sopra sono correlati fra di
loro:
8
2.4 Teorema di Pitagora:
Un'altra dimostrazione geometrica del Teorema di Pitagora (oltre a quella presente in [Id]) che è
particolare in quanto nella costruzione non compare alcun quadrato, fu trovata nel 1876 da Garfield,
che in seguito divenne il ventesimo Presidente degli USA. Garfield commentò così il suo risultato:
"Questo è qualcosa su cui i due rami del parlamento potranno essere d'accordo".
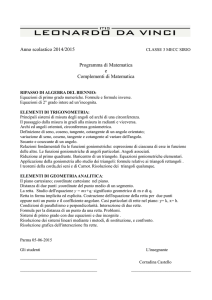
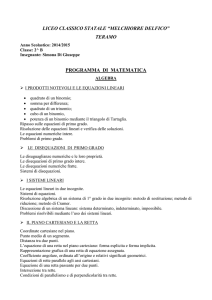
La dimostrazione è la seguente:
Consideriamo una copia del triangolo rettangolo in questione, ruotata di 90 gradi in modo da
allineare i due cateti differenti. Si uniscono poi gli estremi delle ipotenuse, e si ottiene un
trapezio. Uguagliamo l'area del trapezio alla somma di quelle dei tre triangoli retti che lo
formano:
Detto a il cateto rosso, b il blu e c l'ipotenusa (verde), calcolando l'area del trapezio avremo:
Base magg.base min. h abab a 2b 22 ab
;
=
=
2
2
2
mentre se calcoliamo l'area del trapezio come somma delle aree dei tre triangoli si ha:
ab ab c 2 2 abc 2
.
=
2
2
2
2
Uguagliando le sue espressioni si ottiene:
2aba 2b 2 2 abc 2
, da cui:
=
2
2
e il teorema è dimostrato.
9
2
2
a c =c
2
.
3. GEOMETRIA EUCLIDEA SOLIDA
Diamo qui solo qualche complemento a quanto si trova su [Id] su due argomenti specifici.
3.1 La diagonale di un parallelepipedo.
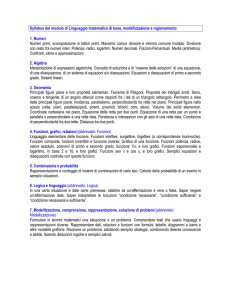
Consideriamo un parallelepipedo di lati l 1 , l 2 , l 3 ; vogliamo determinare la lunghezza della
sua diagonale:
Per prima cosa, calcoliamo la lunghezza della diagonale di una base, il segmento AC in figura.
Per fare ciò utilizzeremo il teorema di Pitagora sul triangolo di lati l 1 , l 2 , AC , ottenendo
così:
AC = l 12 l 22 ;
Consideriamo poi il triangolo rettangolo ABC, la cui ipotenusa AB è la diagonale di cui vogliamo
calcolare la lunghezza; applicando ancora il Teorema di Pitagora, otterremo:
AB =
AC
2
l 32 =
l
2
1
2
l 22 l 23 =
l
2
1
l 22 l 32
Che ci dà la lunghezza desiderata. Notiamo che in particolare, se il parallelepipedo in questione è
un cubo di lato l , la formula diviene:
diagonale
=
l2
l 2 l 2= 3 l 2 = l 3 .
3.2 La sfera.
10
Nel caso di una sfera S di raggio r , determinare il suo volume V S e la sua area totale A S
richiede strumenti di matematica più avanzati di quanto siano gli scopi di questo corso; ne
riportiamo comunque le formule che sono le seguenti:
VS =
4
3
r
3
;
AS = 4 r
2
.
Notiamo che la sfera è la figura tridimensionale con il minimo rapporto fra superficie e volume,
cioè ogni altro solido, a parità di volume, ha una superficie maggiore. Questo spiega perché molti
oggetti fisici tendono ad assumere tale forma, dalle gocce di liquido ai corpi celesti. Ad esempio, le
bolle di sapone sono sferiche perché la loro tensione superficiale tende a minimizzarne l'area (a
parità di volume).
4. GEOMETRIA ANALITICA
4.1 Geometria Analitica nel piano.
Equazioni di rette:
Il problema di cui ci occupiamo adesso è di come si possano individuare i punti di una retta sul
piano tramite una equazione nelle variabili x,y che rappresentano le coordinate cartesiane sul piano
stesso.
Rette parallele agli assi:
Se consideriamo rette parallele all'asse delle y (come la retta r in figura), è facile notare che
tutti i punti sulla retta hanno la stessa coordinata x . Sulla retta r in figura tutti i punti avranno la
x pari a 3; saranno su r, ad esempio, i punti: (3;1) , (3;3), (3;15), (3,-12).
Avremo così che tale retta sarà individuata dalla semplice equazione: x = 3 ; cioè tutti i
punti della retta r hanno coordinate che soddisfano tale equazione (che in questo caso riguarda solo
la x). Possiamo anche dire che un punto del piano P = (x;y) sta sulla retta r se e solo se le sue
coordinate soddisfano all'equazione: x = 3 .
Se consideriamo invece delle rette parallele all'asse x , come la retta s nella figura sopra,
11
avremo invece che tutti i loro punti hanno la stessa coordinata y, nell'esempio avranno la y pari a 2.
Quindi possiamo dire che la retta s è rappresentata dall'equazione y = 2 .
La cosa vista su questi esempi si ripete per qualsiasi retta parallela ad uno dei due assi; avremo
che le rette parallele all'asse y hanno tutte equazione x = k e quelle parallele all'asse x hanno
equazione del tipo y = k ; ove k è una qualsiasi costante.
Notiamo che, in particolare, l'asse y ha equazione x = 0 e l'asse x ha equazione y = 0.
Rette passanti per l'origine degli assi:
Consideriamo una retta r che passi per l'origine O degli assi, come in figura:
La retta r sarà assegnata fissato un qualsiasi punto A = (xΑ;yΑ) su di essa (i punti A ed O
individuano la retta).
Il nostro problema è: “dato un qualsiasi punto P di coordinate (x;y), determinare delle condizioni
su (x;y) che implichino che P sta sulla retta r”.
Siano H e K le proiezioni di A e P sull'asse x. Osserviamo i triangoli AOH e APK; essi sono
rettangoli (in H e K) ed hanno l'angolo in O in comune; quindi hanno i tre angoli congruenti e per
questa ragione sono simili. Allora i lati dei due triangoli sono proporzionali e in particolare avremo:
OK :OH =PK : AH
e cioè: x : xΑ = y : yΑ , o : y xΑ = xyΑ
Questa è l'equazione che i punti della retta devono soddisfare; inoltre, se xΑ non è nullo (e cioè se la
retta non è l'asse y stessa), possiamo scriverla anche:
y=
yA
x .
xA
_________________________________
Esempio: Qual è l'equazione della retta passante per l'origine e per il punto A di coordinate (2;3)?
Dal procedimento visto prima si ha che l'equazione cercata è:
12
3
y= x .
2
Da questo procedimento si vede che per ogni retta passante per l'origine (con l'eccezione dell'asse
yA
y che ha equazione x = 0) è rappresentata da un'equazione del tipo: y = mx , ove m=
;
xA
viceversa, data un'equazione y = mx , essa rappresenta una retta passante per l'origine (individuata,
ad esempio, dal punto A = (1;m) ),
Il numero m , rappresentando il rapporto fra i lati AH ed OH, ci dà una misura dell'inclinazione
della retta (è associato all'ampiezza dell'angolo AOH); maggiore sarà il valore assoluto di m e più la
retta sarà in posizione vicina alla verticale, mentre più m si avvicina a 0, più la retta diviene vicina
alla posizione orizzontale (e per m=0 la retta è orizzontale, coincidendo con l'asse x).
Inoltre il segno di m ci dice da che parte è inclinata la retta ( “/ “ per m > 0; “\ “ per m < 0).
Equazione generale della retta:
Consideriamo adesso il caso più generale di una retta r qualsiasi del piano, individuata da due
punti A,B : escluderemo solo il caso che r sia parallela ad un'asse delle coordinate, in quanto
abbiamo già analizzato quell'evenienza.
Anche adesso, vogliamo vedere quali siano le condizioni sulle coordinate (x;y) di un punto P,
affinché P stia sulla retta r.
Procediamo in modo analogo a prima; consideriamo le proiezioni di A, B e P sugli assi e poi i
triangoli ABH e APK che si vengono a formare. Di nuovo i due triangoli saranno simili avendo i
tre angoli uguali, e quindi i loro lati sono in proporzione. Si ha:
AK : AH =PK : BH
e cioé: (x – xΑ): (xΒ – xΑ) = (y – yΑ): (yΒ – yΑ) .
Quindi l'equazione che determina la retta r è:
x− x A
y− y A
=
;
x B −x A
y B− y A
________________________________
Esempio: Qual è l'equazione della retta passante per i punti A = (2;3) e B = (4;5)?
Dal procedimento visto sopra si ha che la retta cercata sarà:
13
x−2
y−3
=
, e cioè
4−2
5−3
x−2
y−3
=
, che dà:
2
2
x−2 = y−3 , e quindi x – y + 1 = 0 .
Sviluppando l'equazione vista sopra si può ottenere x− x A y B − y A = y− y A x B− x A , e poi:
y B − y A x− x B −x A y x B −x A y A− y B− y A x A = 0 .
Ci si riduce quindi, ponendo:
y B − y A = a ; − x B −x A = b ; x B− x A y A− y B− y A x A = c ,
ad un'equazione del tipo:
ax+by+c = 0 .
Questa è chiamata equazione generale della retta. Ogni retta è rappresentata da un'equazione di
questo tipo; notiamo che si ottengono rette parallele all'asse y se b = 0, rette parallele all'asse x se
a = 0, e rette per l'origine se c = 0.
In generale, si ha quindi che ogni retta del piano può essere rappresentata tramite una equazione
del tipo ax+by+c = 0 e ogni equazione di questa forma rappresenta una retta. La corrispondenza
fra rette ed equazioni non è però biunivoca: infatti consideriamo ad esempio le due equazioni:
3x + 2y - 4 = 0 e 6x + 4y – 8 = 0 ;
le due equazioni non sono uguali, ma la seconda si ottiene moltiplicando tutti i termini della prima
per 2, la potrei scrivere 2(3x + 2y - 4) = 0 ; ciò ci dice che le due equazioni sono equivalenti, hanno
le stesse soluzioni e quindi rappresentano la stessa retta.
In sintesi, due equazioni del tipo ax+by+c = 0 che abbiano i coefficienti a, b, c proporzionali
rappresentano la stessa retta.
C'è un altro modo, molto usato, per scrivere l'equazione della retta; se si ha b ≠ 0 (e quindi la
retta non è verticale), si può riscrivere la forma ax+by+c = 0 ricavando la y e ottenendo:
a
c
y = − x− , e cioè un'equazione della forma:
b
b
y = mx + q .
Scritta in questa forma (detta anche forma implicita), si ha (come nel caso delle rette per l'origine)
a
che il numero m = −
è indicativo perché rappresenta l'inclinazione della retta. Infatti, se
b
torniamo alla forma della retta ricavata in precedenza:
y B − y A x− x B −x A y x B −x A y A− y B− y A x A = 0 ,
notiamo che da essa si ricava:
y =
y B− y A
x − x A y A− y B − y A x A
x− B
=mxq ;
x B−x A
x B −x A
y B− y A
rappresenta il rapporto fra i cateti del triangolo ABH , risultando così
x B − x A
ancora legato all'inclinazione della retta.
e quindi
m =
14
La quantità m è denominata coefficiente angolare della retta.
Dall'equazione y = mx + q si può ricavare che r passa per il punto (0;q) , quindi il significato
geometrico della costante q è che essa ci dà il valore della y all'incontro di r con l'asse y stessa.
Consideriamo ora il seguente problema: se di una retta si sa l'equazione, sia essa data nella forma
ax+by+c = 0 che nella forma y = mx + q , come si fa a determinarne il grafico nel piano
cartesiano?
Poiché per disegnare una retta ci servono due punti su di essa, dovremo usare l'equazione per
trovare due tali punti.
3
y = − x 3 ) ; per
2
trovare un punto su r diamo ad x il valore 0; avremo allora 2y - 6 = 0 e quindi y=3; ciò ci dice che
il punto (0;3) sta sulla retta. Se invece diamo alla y il valore 0, otterremo 3x - 6 = 0 e quindi x=2,
quindi il punto (2;0) è anch'esso sulla retta. Quindi adesso possiamo tracciarla.
Vediamolo su un esempio. Sia r la retta di equazione 3x+2y - 6 = 0 (o
Il metodo quindi funziona così: si dà un valore a caso alla x e si ricava la y (o viceversa) per
trovare un punto sulla retta. Una volta ricavati due punti, siamo in grado di disegnarla.
Rette parallele e punto d'incidenza fra due rette.
Poiché il coefficiente angolare m dà l'inclinazione di una retta (tranne che per le rette parallele
all'asse y), avremo che rette parallele hanno lo stesso coefficiente angolare. Quindi un metodo per
riconoscere se due rette siano parallele o meno è quello di riportare la loro equazione alla forma
implicita y = mx + q , e controllare se i loro coefficienti angolari sono uguali o meno.
____________________________________________
Esempio:
Date le rette di equazioni 6x+4y - 12 = 0 e 9x+6y - 24 = 0, dire se siano parallele o no.
Portiamo le due equazioni in forma implicita:
4y = -6x+12 , da cui
3
y = − x 3 :
2
6y = -9x+24 , da cui
15
3
y = − x 4 .
2
Otteniamo che i due coefficienti angolari sono uguali (pari a
−3
), per cui le due rette sono
2
parallele.
E' possibile verificare il parallelismo anche mantenendo le rette nella forma generale. Se abbiamo
due rette di equazioni ax+by+c = 0 e a'x+b'y+c' = 0 ; poiché i loro coefficienti angolari sono
a
a'
a
a'
m = −
=
e m' = −
, si avrà che essi sono uguali se e solo se
, cioè se i
b
b'
b
b'
coefficienti delle incognite sono proporzionali : a : b = a' : b' .
Se riprendiamo l'esempio visto in precedenza, si può osservare che le rette 6x+4y - 12 = 0 e
9x+6y - 24 = 0 verificano alla proporzionalità richiesta: 6 : 4 = 9 : 6.
Osserviamo che se in due equazioni tutti i coefficienti sono in proporzione, come accade ad
esempio se consideriamo:
6x+4y - 12 = 0 e 9x+6y - 18 = 0 , allora le due equazioni
rappresentano rette parallele coincidenti (cioè la stessa retta). Infatti in questo caso una equazione
3
si ottiene moltiplicando l'altra per una costante (nell'esempio
(6x+4y - 12) = 9x+6y - 18 ),
2
quindi le due equazioni hanno le stesse soluzioni.
In generale, si ha poi che se abbiamo due rette di equazioni ax+by+c = 0 e a'x+b'y+c' = 0 , il
loro punto d'incontro (se esiste) sarà dato dalla soluzione del sistema formato dalle due equazioni,
poiché le sue coordinate devono soddisfare entrambe le equazioni.
______________________________
Esempio:
Date le rette di equazioni x+y - 2 = 0 e 2x - 3y + 1 = 0, trovarne (se esiste) il punto d'incontro.
y−2=0
avremo:
{2 x
x −3 y1=0 }
y
x=2− y
x=2− y
x=1
; {
; {
; {
.
}
}
{2 2− x=2−
y−3 y1=0 }
5−5y=0
y =1
y=1 }
Consideriamo il sistema:
Quindi il punto d'incontro delle due rette ha coordinate (1;1).
Rette perpendicolari
Osserviamo poi quale sia la relazione fra i coefficienti angolari di due rette perpendicolari.
Se le rette r ed r' sono perpendicolari (e nessuna delle due è orizzontale né verticale), i
coefficienti angolari rispettivi, m ed m' , sono legati dalla relazione:
m' = −
1
.
m
Infatti, possiamo notare che m ed m' (che sicuramente devono avere segno opposto perché r ed r'
hanno inclinazione opposta), mentre come valore assoluto essi devono essere l'uno il reciproco
dell'altro in quanto sono dati dal rapporto fra i cateti dei triangoli ABH e A'B'H' (vedi figura
sotto). In dettaglio, si ha
16
m =
y B− y A
, e
x B − x A
m' =
y B'− y A '
x −x A
1
=− B
=−
.
x B ' −x A '
y B − y A
m
Rette per un punto dato.
Può tornare utile la seguente formula che, assegnato un punto
delle rette per P, al variare del loro coefficiente angolare m:
P = x P ; y P dà l'equazione
v − y P = m x −x P .
Da notare che la retta verticale
come quella sopra.
x = x P è l'unica retta per P non rappresentata da un'equazione
Equazione generale della circonferenza:
Dalla formula per la distanza fra due punti:
AB = x B− x A2 y B − y A2 , si ricava
l'equazione che caratterizza il luogo formato dai punti P = ( x , y ) aventi distanza fissata r da un
punto C = x C , y C e cioè una circonferenza di centro C e raggio pari ad r :
r =
x−x
C
2 y− y C 2 .
Da qui, elevando al quadrato e svolgendo i conti, avremo:
x 2 y 2−2 x C x −2 y C yx 2C yC2 −r 2 = 0 .
17
Quindi si ha che tutte le circonferenze hanno una equazione della forma:
x 2 y 2a xb yc = 0 ,
ove a = 2 x C ; b = −2 y C ; c = x 2C y 2C −r 2 .
Ma, attenzione, se abbiamo una equazione del tipo x 2 y 2a xb yc = 0 , non è detto
che essa rappresenti una circonferenza; infatti consideriamo ad esempio:
2
2
x y 3 x4 y10 = 0
Se essa rappresentasse una circonferenza, dovremmo avere:
3
a = 3 = −2 x C ; b = 4 = −2 yC ; e quindi :
x C = − ; y C = −2 .
2
9
9
15
2
2
2
2
2
Si avrebbe allora c = 10 = x C y C −r = 4−r , e quindi r = 4−10 = −
4
4
4
il che è impossibile perché
r 2 non può essere un numero negativo. Quindi l'equazione non
rappresenta una circonferenza (non rappresenta niente, non avendo soluzioni).
4.2 Geometria analitica nello spazio.
Ricordiamo da quanto visto in [Id] che la formula per la distanza fra due punti A , B nello spazio
è data dalla formula:
AB = x B− x A2 y B − y A2 z B− z A2 .
Da essa, analogamente a quanto fatto per la circonferenza, si ricava la formula per l'equazione
che caratterizza una circonferenza di centro C e raggio r :
r = x−x C 2 y− y C 2 z−z C 2 ,
che, elevando al quadrato e svolgendo i conti, dà:
2
2
2
2
2
2
2
x y z −2 x C x−2 yC y−2 z C z x C y C z C −r = 0 .
Ad esempio una sfera di centro l'origine O = (0,0,0) e raggio r = 3 , avrà equazione:
x 2 y 2z 2 = 9 .
18
Se invece cerchiamo l'equazione del piano che contiene l'asse delle x e quella delle y, possiamo
notare che tutti i suoi punti hanno la coordinata z pari a 0, quindi l'equazione che lo caratterizza è
proprio z = 0 .
In generale si ha che ogni piano nello spazio è dato da un'equazione del tipo: ax+by+cz = 0 , e
viceversa, ogni equazione ax+by+cz = 0 , ove a,b,c non siano tutti nulli, dà un piano, cioè i punti
P = (x,y,z) , che la soddisfano formano un piano nello spazio (non dimostriamo questa cosa).
Notiamo che in generale nello spazio una equazione darà una superficie, mentre per ottenere una
curva avremo bisogno di un sistema con due equazioni, ad esempio per avere una retta avremo
bisogno di un sistema, come:
così la retta risulta come intersezione fra i piani di equazioni ax+by+cz = 0 e a'x+b'y+c'z = 0 .
Una circonferenza nello spazio richiede anch'essa un sistema di due equazioni; ad esempio il
sistema:
x 2 y 2z 2 = 9
z =0
rappresenta la circonferenza che è l'intersezione della sfera di equazione x 2 y 2z 2 = 9 con il
piano di equazione z= 0 .
{
}
4.3 Coordinate polari e sferiche (cenni).
Un altro modo per rappresentare i punti del piano tramite coordinante è quello detto delle
coordinate polari. In questo caso ogni punto non viene individuato dalle sue coordinate cartesiane
x ed y, ma dalla lunghezza del segmento che lo unisce all'origine, e dall'angolo che tale segmento
forma con l'asse x.
Quindi sono sempre due numeri ad individuare il punto P, ma è la coppia ( ρ, θ ) , data da due
numeri (positivi) rappresentanti le misure del segmento OP (si usa la lettera greca rho) e
dell'angolo POx (si usa la lettera greca theta).
In queste coordinate polari, una equazione come: ρ = 3 , rappresenta una circonferenza (di
centro l'origine e raggio 3), mentre una come θ = 60° rappresenta una semiretta (uscente
dall'origine).
L'utilità di questo tipo di coordinate si ha ogni volta che si descrivono figure geometriche
particolari, come spirali ad esempio, oppure, nelle applicazioni, per problemi di puntamento.
19
In analogia con le coordinate polari sul piano, nello spazio abbiamo le coordinate sferiche:
Servono a identificare un punto nello spazio, una volta fissata una terna di assi cartesiani (x, y e
z). Un punto P è individuato dalla terna ρ, θ e ϕ (phi) dove:
ρ
è chiamato raggio vettore (distanza PO)
θ è chiamato distanza zenitale o colatitudine o anche elevazione ( è l'angolo formato da PO con
l'asse z, dove O è l'origine degli assi)
si chiama azimut o longitudine (angolo formato da OH con l'asse x dove H è la proiezione
ortogonale del punto P sul piano xy)
ϕ
Su questa base si definiscono le coordinate terrestri :
Nelle coordinate terrestri per individuare un punto P sulla superficie terrestre si usa la
longitudine (l'angolo fra il meridiano di P e quello di riferimento di Greenwich) e la latudine
20
angolo formato da P, il centro della terra C e la proiezione P' di P sull'equatore ( ρ è fissato dal
raggio della terra).
Metodi analoghi si usano per sistemi di coordinate astronomiche, usate per individuare le
posizioni degli astri sulla volta celeste.
21