ALGEBRA: LEZIONI DAL 17 NOVEMBRE AL 1 DICEMBRE
Scrivo questi appunti in forma temporaneamente incompleta: preferisco farvi avere immediatamente tutta la teoria che abbiamo
visto a lezione, e rimandare ad un momento successivo gli argomenti applicativi o facoltativi che abbiamo visto solo di sfuggita.
1. B ASI E COORDINATE
1.1. Coordinate di vettori rispetto ad una base. Abbiamo già visto come associare ad una base B = (v1 , . . . , vn ) di uno spazio
vettoriale V un’applicazione lineare invertibile φB : Rn → V . L’applicazione è definita da φB (α1 , . . . , αn ) = α1 v1 + · · · + αn vn
ed è chiaramente iniettiva (per l’indipendenza lineare degli elementi di B) e suriettiva (poiché sono generatori).
Se v = α1 v1 + · · · + αn vn , allora (α1 , . . . , αn ) si dicono coordinate di v nella base B, ed è immediato riconoscere come l’inversa
di φB associ a ciascun vettore le sue coordinate nella base B. Per comodità nostra, indicheremo con [v]B le coordinate di v nella
base B scritte in colonna.
1.2. Coordinate in basi diverse. Sebbene le coordinate di un vettore in una base lo descrivano completamente, è a volte comodo
poter calcolare le coordinate di vettori in più basi; diventa a questo punto essenziale saper tradurre le informazioni da una base
all’altra.
Se B = (v1 , . . . , vn ), B0 = (w1 , . . . , wn ) sono due basi diverse dello stesso spazio vettoriale V , si vede subito che la composizione φ−1
◦ φB : Rn → Rn associa ad una n-upla (α1 , . . . , αn ) le coordinate del vettore α1 v1 + · · · + αn vn nella base B0 . Poiché
B0
−1
B tale che
φB0 ◦ φB è lineare, esiste un’unica matrice n × n a coefficienti reali MB
0
B
MB
0 [v]B = [v]B0 .
B contiene le coordinate del vettore v nella base B0 .
Abbiamo visto a lezione che l’i-esima colonna di MB
i
0
B può essere problematico. Ad ogni modo, se E è una base particolarmente comoda in cui fare conti,
Il calcolo della matrice MB
0
si ha immediatamente
MEB = [v1 ]E [v2 ]E . . . [vn ]E .
0
0
B M B = M B , si vede subito che M B = (M B )−1 , da cui
Poiché MB
00
B
B0
B00
B0
B
E
B
MB
0 = MB0 ◦ ME = [w1 ]E
[w2 ]E
...
[wn ]E
−1
[v1 ]E
[v2 ]E
...
[vn ]E .
Nel caso particolare in cui V = Rn e E è la base canonica, le coordinate di un vettore v ∈ Rn nella base E sono date dai
coefficienti stessi del vettore v. Pertanto, [v]E non è altro che il vettore v scritto in colonna. Questo rende semplice il calcolo della
B . Vediamo un esempio: se V = R2 , v = (2, 5), v = (3, 4) e w = (1, 2), w = (1, 3), allora la matrice che converte
matrice MB
1
2
1
2
0
coordinate calcolate nella base B = (v1 , v2 ) a quelle nella base B0 = (w1 , w2 ) è
B
MB
0 =
1
2
−1 1
2
3
5
3
3
=
4
−2
−1
1
2
5
3
1
=
4
1
5
.
−2
1.3. Matrice associata ad applicazioni lineari e cambiamenti di base. Se abbiamo un’applicazione lineare T : V → W , e basi
B = (v1 , . . . , vm ), C = (w1 , . . . , wn ) di V e W rispettivamente, possiamo allora costruire una matrice [T ]B
C la cui i-esima colonna
è [T (vi )]C . Quando V = Rm , W = Rn e le basi B e C sono canoniche, questa procedura costruisce la matrice che abbiamo finora
associato ad un’applicazione lineare Rm → Rn ; il nuovo procedimento generalizza quello vecchio, e permette di associare matrici
anche ad applicazioni tra spazi vettoriali che non sono i nostri familiari Rn .
La matrice [T ]B
C ha significato e utilizzo simili a quella precedentemente definita. Si ha in particolare
[T ]B
C [v]B = [T (v)]C ,
B considerata prima.
e si riconosce immediatamente come [Id]B
debba coincidere con la matrice di cambiamento di coordinate MB
0
B0
La composizione si traduce nuovamente nel prodotto righe per colonne, una volta verificato che la scelta delle basi sia compatibile:
B
B
[T ]C
D [S]C = [T ◦ S]D .
Supponendo di avere basi B, B0 di V e C, C0 di W , allora la relazione tra le matrici associate a T : V → W con le diverse scelte
di basi è la seguente:
0
0
C
B
B
[T ]B
C0 = MC0 [T ]C MB .
Nel caso particolare in cui T sia un endomorfismo dello spazio vettoriale V , e si utilizzi la stessa base in partenza e in arrivo, si
avrà:
0
0
B
B
B
[T ]B
B0 = MB0 [T ]B MB .
0
B , e con M = [T ]B , M 0 = [T ]B , si ottiene M 0 = XM X −1 ; le matrici M ed M 0 sono quindi coniugate. In
Indicando con X = MB
0
B
B0
seguito sarà importante osservare che det(M 0 ) = det(XM X −1 ) = det(X) det(M ) det(X)−1 = det(M ).
2. D IAGONALIZZAZIONE DI ENDOMORFISMI
2.1. Il rango come unico invariate di un’applicazione lineare a meno di cambiamenti di base.
1
2
ALGEBRA
2.2. Diagonalizzazione di endomorfismi: autovalori e autovettori. Abbiamo visto a lezione come possa essere spesso desiderabile
individuare una base B di uno spazio vettoriale V in modo che la matrice associata ad un endomorfismo lineare T : V → V ,
utilizzando B sia come base in partenza che in arrivo, sia diagonale — abbia cioè solo coefficienti nulli al di fuori della diagonale
principale.
Ci siamo convinti rapidamente che una base diagonalizzante è una base costituita da soli autovettori. Richiamo per comodità le
definizioni:
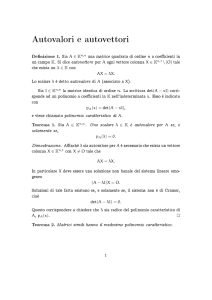
Definizione 2.1. Un vettore v 6= 0 si dice autovettore dell’endomorfismo T : V → V se T (v) = λv per qualche λ ∈ R. In tal caso λ
si dice autovalore di T , e v autovettore di autovalore λ.
Se λ è un autovalore di T , allora ker(T − λ id) è detto λ-autospazio di T . E’ un sottospazio vettoriale di V costituito da tutti gli
autovettori di T di autovalore λ, nonché dal vettore nullo.
E’ evidente che ogni base che diagonalizza T può solamente essere ottenuta scegliendo vettori linearmente indipendenti da
ciascun autospazio, e mettendoli insieme in modo da formare una base. Abbiamo visto a lezione che una simile strategia può
tuttavia trovare degli intoppi.
2.3. Condizioni necessarie e sufficienti per la diagonalizzazione. Per caratterizzare la diagonalizzabilità di un endomorfismo
T di V , abbiamo introdotto alcuni concetti: il polinomio caratteristico di T e le molteplicità algebrica e geometrica di ciascun
autovalore di T .
Riassumo quello che abbiamo detto a lezione.
Proposizione 2.2. Il numero reale λ è un autovalore dell’endomorfismo lineare T : V → V esattamente quando l’applicazione T − λ id non
è iniettiva. Se V ha dimensione finita, questo può essere controllato verificando che det(T − λ id) = 0.
Dimostrazione. λ è autovalore se esiste v 6= 0 tale che T (v) = λv. Quest’ultima relazione si può riscrivere (T − λ id)(v) = 0, e
l’ipotesi che v 6= 0 garantisce la non iniettività di T − λ id.
In dimensione finita, la non iniettività di T − λ id può essere verificata sulla matrice associata, nella base preferita, a T − λ id,
che dovrà avere colonne linearmente dipendenti. Questo si può fare calcolandone il determinante e controllando che si annulli. E’ importante notare che det[T − λ id]B
B non dipende dalla scelta della base B, come si è visto prima. Ha senso, quindi, indicare
tale espressione come det(T − λ id) senza fare riferimento alla base.
Abbiamo visto a lezione che det(T − x id) è un polinomio di grado n = dim V nella variabile x, e la ricerca degli autovalori di
T si riduce a trovare le radici di tale polinomio, detto polinomio caratteristico di T .
Se λ è un autovalore di T , la sua molteplicità algebrica è la massima potenza di x − λ che divide il polinomio caratteristico; la
molteplicità geometrica di λ è invece la dimensione del λ-autospazio.
Proposizione 2.3. La molteplicità geometrica di un autovalore è sempre minore o uguale alla sua molteplicità algebrica.
Dimostrazione. Sia d = dim ker(T − λ id). Scegliamo una base k1 , . . . , kd dell’autospazio ker(T − λ id), e completiamola ad una
base B di V aggiungendo i vettori vd+1 , . . . , vn . Avremo allora
λ
0
... 0 ∗ ... ∗
0
λ
. . . 0 ∗ . . . ∗
.
..
..
.
0 ∗ . . . ∗
0 ...
0
λ ∗ . . . ∗ .
[T ]B
B =
0 . . . . . . 0 ∗ . . . ∗
.
.
.
.
..
..
..
..
0 ... ... 0 ∗ ... ∗
Il polinomio caratteristico di T si può ottenere applicando ripetutamente lo sviluppo di Laplace sulle prime colonne, e si ottiene un
multiplo di (x − λ)d . Di conseguenza, la molteplicità algebrica di λ deve essere ≥ d.
Questa non è l’unica informazione importante che abbiamo a proposito degli autovalori. In effetti, sia la molteplicità algebrica
che quella geometrica di ciascun autovalore è ≥ 1. Inoltre, la somma delle molteplicità algebriche è ≤ n.
Vediamo una semplice conseguenza: se la molteplicità algebrica di λ è 1, allora la sua molteplicità geometrica deve essere ≥ 1,
dal momento che lo è sempre, e ≤ 1, poiché è maggiorata dalla molteplicità algebrica. Di conseguenza, anche la molteplicità
geometrica deve essere uguale ad 1.
Proposizione 2.4. L’endomorfismo T : V → V può essere diagonalizzabile solamente se la somma delle molteplicità geometriche dei suoi
autovalori è uguale a n = dim V .
Dimostrazione. In generale, sappiamo che la somma delle molteplicità geometriche degli autovalori è minore o uguale alla somma
delle molteplicità algebriche, che è a sua volta minore o uguale al grado del polinomio caratteristico, che è n = dim V .
Tuttavia, se la somma delle molteplicità geometriche è inferiore a n, allora scegliendo vettori linearmente indipendenti da
ciascun autospazio non si riesce ad costruire una base di V , perché i vettori così ricavati sono meno di n.
Il risultato principale dimostrato nel corso è il seguente:
Teorema 2.5. Sia T : V → V un’applicazione lineare, e V uno spazio vettoriale di dimensione finita n. Allora T è diagonalizzabile se e solo
se la somma delle molteplicità geometriche degli autovalori di T è uguale ad n.
La dimostrazione data a lezione seguiva immediatamente dal seguente fatto:
Lemma 2.6. Se v1 , . . . , vh sono elementi appartenenti ad autospazi distinti di T , e v1 + · · · + vh = 0, allora v1 = · · · = vh = 0.
ALGEBRA
3
Dimostrazione. Per induzione su h, il caso h = 1 essendo ovvio.
Se v1 , . . . , vh+1 sono elementi degli autospazi di autovalori (distinti) λ1 , . . . , λh+1 , allora T (vi ) = λi vi . Poiché v1 + · · · +
vh+1 = 0, applicando T si ottiene
λ1 v1 + · · · + λh vh + λh+1 vh+1 = 0.
Moltiplicando invece l’identità di partenza per λh+1 si ottiene
λh+1 v1 + · · · + λh+1 vh + λh+1 vh+1 = 0.
Sottraendo membro a membro:
(λh+1 − λ1 )v1 + · · · + (λh+1 − λh )vh = 0.
E’ sufficiente ora osservare che ciascun (λh+1 − λi )vi è un elemento dell’i-esimo autospazio, e che poiché la somma di h siffatti
elementi è nulla, ciascuno di essi è 0 per ipotesi induttiva. Ma λh+1 − λi 6= 0 per ogni i, e così concludiamo che v1 = v2 = · · · =
vh = 0. Che vh+1 sia anch’esso uguale a 0 si ottiene adesso per sottrazione.
A lezione ho chiarito che, in generale, non è vero che la somma delle molteplicità algebriche degli autovalori sia uguale al
grado del polinomio caratteristico. Quando tale somma è inferiore al grado, è impossibile che si arrivi alla diagonalizzazione
dell’endomorfismo dato.
Quando invece la somma delle molteplicità algebriche è uguale al grado del polinomio, la condizione di diagonalizzabilità
diventa l’uguaglianza tra la molteplicità algebrica e geometrica di ciascun autovalore. La somma delle molteplicità algebriche è
sempre uguale al grado del polinomio se si sceglie accuratamente il campo; ad esempio, se gli scalari sono i numeri complessi C
e non quelli reali. Questo dipende dal fatto che ogni polinomio (non costante) a coefficienti complessi ha una radice complessa, e
pertanto si fattorizza completamente nel prodotto di fattori lineari. Questo non avviene per polinomi reali, come abbiamo visto in
più esempi a lezione.
3. T EOREMA SPETTRALE , D ECOMPOSIZIONE A VALORI SINGOLARI
3.1. Ortonormalizzazione di Gram-Schmidt.
3.2. Triangolarizzazione di endomorfismi.
3.3. Il teorema spettrale per applicazioni simmetriche e normali.
3.4. La decomposizione a valori singolari.
4. A LCUNE APPLICAZIONI
4.1. Integrali di funzioni razionali.
4.2. Equazioni differenziali.
4.3. Algoritmo page-rank.
4.4. Compressione di dati. bla
D IPARTIMENTO DI M ATEMATICA , U NIVERSITÀ DEGLI STUDI DI R OMA – “L A S APIENZA”
E-mail address: [email protected]