5
Le Basi Fisiche della Relatività Generale
e la derivazione delle Equazioni di Friedmann
Fino ad ora ci siamo occupati di caratterizzare la “geometria” di un universo omogeneo ed isotropo in espansione uniforme ottenendo la metrica di
Robertson e Walker
´ r ¯`
˘ı
aptq2 ”
ds2 “ dt2 ´ 2 dr2 ` R2 sin2
d✓2 ` sin2 ✓d 2
c
R
Adesso dobbiamo metterci la “fisica” ed è chiaro che, poichè il nostro universo in generale è “curvo”, dovremo utilizzare le equazioni della Relatività
Generale.
La Relatività Generale è presentata in altri corsi, come ad esempio Astrofisica delle Alte Energie. In questo corso ci limiteremo ad una rapida panoramica per poter giungere al risultato che ci interessa, ovvero l’utilizzo della
metrica RW con le equazioni di campo di Einstein per ottenere le equazioni
che regolano aptq.
Il concetto di Relatività riguarda le trasformazioni subite dalle leggi della
Fisica a seguito di trasformazioni dinamiche, ovvero che coinvolgono il tempo
come ad esempio le trasformazioni tra sistemi di riferimento in moto l’uno
rispetto all’altro. Particolare importanza è rivestita dal fatto che le leggi della
Fisica non debbano dipendere dal sistema di riferimento: in sostanza, non si
dovrebbero avere sistemi di riferimento “assoluti” ed il Principio Cosmologico
non esprime altro che questo stesso concetto.
La Relatività Galileiana stabilisce l’invarianza formale o covarianza delle
equazioni della Meccanica Classica per trasformazioni di Galileo ovvero per
trasformazioni tra sistemi di riferimento in moto rettilineo uniforme l’uno
rispetto all’altro; questi sistemi di riferimento sono detti inerziali. Questa
covarianza implica che con le leggi della Meccanica Classica non è possibile
definire un sistema di riferimento assoluto.
La covarianza per trasformazioni di Galileo non si applica alle equazioni
di Maxwell per le quali potrebbe quindi esistere un sistema di riferimento
assoluto, l’etere. L’esperimento di Michelson e Morley aveva proprio lo scopo
di misurare la velocità della luce rispetto all’etere.
La Relatività Speciale di Einstein invece stabilisce che le trasformazioni
appropriate per i sistemi inerziali sono quelle di Lorentz. Le equazioni di
Maxwell sono covarianti per trasformazioni di Lorentz e quindi non è più
possibile definire un riferimento assoluto (l’etere). Anche le equazioni della
Meccanica Classica possono essere scritte in forma covariante per trasfor62
mazioni di Lorentz. Nel limite in cui v{c ! 1 le trasformazioni di Lorentz si
riducono alle trasformazioni di Galileo e le equazioni della Meccanica Classica
ritornano alla forma covariante per trasformazioni Galileiane. Con la Relatività Speciale si arriva all’introduzione di un continuo quadridimensionale
spazio-tempo caratterizzato da una geometria non-Euclidea con metrica
ds2 “ dt2 ´
dl2
c2
(5.1)
detta metrica di Minkowski.
Le trasformazioni di Lorentz, la metrica di Minkowski e la Relatività
Speciale in genere riguardano i sistemi di riferimento inerziali cosı̀ come
accadeva per la relatività Galileiana.
Come è possibile trattare i riferimenti inerziali espandendo la teoria della
relatività speciale? Come tener conto delle forze “apparenti” che potrebbero
comparire come avviene per la trattazione classica della meccanica in un
sistema di riferimento inerziale?
Il punto di partenza di Einstein fu l’equivalenza tra la massa inerziale e la
massa gravitazionale, come suggerito dall’esperimento di Eötvös. In pratica
Einstein partı̀ dalla semplice considerazione che una persona in caduta libera
non percepisce il proprio peso. Infatti il secondo principio della dinamica
a↵erma che
F~i “ mi~a
(5.2)
con mi massa inerziale, ovvero la “resistenza” di un corpo ad essere accelerato
da una forza. La legge di gravitazione universale di Newton, applicata in
un campo gravitazionale costante come quello sulla superficie della Terra,
a↵erma invece
F~g “ mg~g
(5.3)
per cui applicando il II principio si ha
mg~g “ mi~a
(5.4)
Ponendosi in un riferimento in caduta libera ovvero con accelerazione ~a (quindi non inerziale) si ha che l’accelerazione è nulla ma la forza totale contiene
un contributo dovuto alle forze apparenti per cui
mg~g ´ mi~a “ 0
(5.5)
il primo membro rappresenta la forza, il secondo membro il prodotto di massa
ed accelerazione nel riferimento accelerato. Se mi “ mg allora ~a “ ~g e la
forza percepita nel riferimento in caduta libera è
F~ “ mg~g ´ mi~a “ 0
63
(5.6)
ovvero non si sente il proprio peso!
Più in generale possiamo eliminare la forza di gravità passando ad un
sistema di riferimento non inerziale in caduta libera nel campo gravitazionale
e, in pratica, se ne deduce che le forze apparenti dei sistemi non inerziali e le
forze gravitazionali devono avere la stessa origine.
E’ importante notare come la gravità possa essere eliminata solo localmente ovvero nelle regioni dello spazio dove si può considerare costante. Quindi
in un’opportuna regione di un qualsiasi campo gravitazionale è possibile effettuare una trasformazione di coordinate che riduca le equazioni alla forma
tipica di un sistema inerziale, ovvero alle equazioni della Relatività Speciale.
Dopo questa breve introduzione, possiamo passare a vedere quelle che sono le basi fisiche utilizzate da Einstein per la teoria della Relatività Generale.
1. Il Principio di Relatività: le leggi della fisica sono covarianti per trasformazioni di coordinate (ovvero mantengono la stessa forma in tutti
i sistemi di riferimento).
2. Il Principio di Equivalenza: massa inerziale e gravitazionale sono uguali, mi “ mg , per cui in ogni punto dello spazio-tempo ed in un qualsiasi campo gravitazionale è possibile scegliere un sistema di riferimento
inerziale locale tale che, in un regione piccola dello spazio, le leggi della
fisica abbiano la stessa forma che in un sistema cartesiano non accelerato in assenza di gravità (ovvero la stessa forma nel caso della Relatività
Speciale).
3. Il Principio di Mach: le proprietà inerziali locali sono determinate dalla
distribuzione di materia ed energia.
Mettendo insieme (1) e (2) è chiaro che posso ottenere le leggi della fisica
a partire da quelle scritte nell’ambito della Relatività Speciale e che devo
soltanto trovare il modo di scriverle in forma covariante ovvero invariante
per trasformazione di coordinate nello spazio tempo considerato che sarà
caratterizzato da una metrica
ds2 “ gµ⌫ xµ x⌫
(5.7)
e che sarà in generale uno spazio-tempo descritto da una geometria Riemanniana.
La (3) ci permette di collegare gµ⌫ alla distribuzione di materia ed energia
nello spazio tempo e quindi di conoscere gµ⌫ ovvero la geometria dello spazio.
Si noti come la Relatività Generale sia una teoria intrinsecamente nonlineare: infatti un campo gravitazionale dovuto ad una distribuzione di massa
genera una certa densità di energia locale in ogni punto dello spazio; dato che
64
E “ mc2 , questo significa che c’è una certa densità di massa inerziale associata al campo gravitazionale che è a sua volta sorgente di campo gravitazionale.
Questo caso del campo gravitazionale è diverso dal campo elettrico: quest’ultimo genera una certa densità di energia in ogni punto dello spazio e quindi
una corrispondente densità di massa. Ma la massa non genera un’ulteriore
carica elettrica e quindi non genera ulteriore campo elettrico.
Quando Einstein ricercò la forma più generale di trasformazione tra sistemi di riferimento per metriche della forma
ds2 “ gµ⌫ xµ x⌫
(5.8)
scoprı̀, grazie al suo amico matematico Marcel Grossman, che queste erano
date dalle geometrie Riemanniane il cui difetto era quello di essere “non
lineari”. In realtà Einstein si rese subito conto che la non linearità era un
vantaggio delle geometrie Riemanniane perché la teoria della gravità, come
abbiamo appena visto, deve essere intrinsecamente non lineare.
Vediamo adesso due esempi elementari che però ci aiutano a capire come il principio di equivalenza abbia conseguenze profonde per la nostra
comprensione della natura dello spazio tempo in un campo gravitazionale.
5.1
Esempio: il redshift gravitazionale
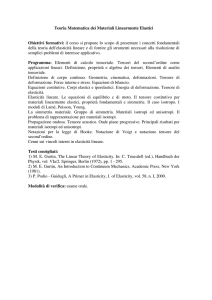
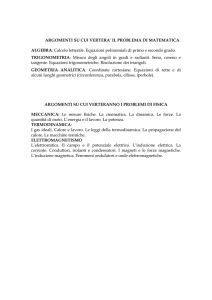
Consideriamo un riferimento stazionario posto in un campo gravitazionale
uniforme ~g . In base al principio di Equivalenza, questo riferimento è equivalente ad un riferimento non inerziale uniformemente accelerato con ~a “ ~g
(figura 23). Ovvero, un osservatore posto all’interno dell’ascensore non è in
grado di distinguere tramite qualsiasi tipo di misura se si trova in un sistema
inerziale posto in un campo gravitazionale o se si trova in un sistema non
inerziale uniformemente accelerato.
Consideriamo un’onda elettromagnetica di frequenza ⌫ che si propaga dal
soffitto al pavimento dell’ascensore e supponiamo che ~a sia piccola. Se h è
l’altezza dell’ascensore, l’onda e.m. impiega un tempo t “ h{c per giungere
dal soffitto al pavimento dell’ascensore. In base al principio di equivalenza
i due ascensori in figura 23 sono perfettamente equivalenti come sistemi di
riferimento. Pertanto possiamo considerare la propagazione del fotone nel
caso del riferimento accelerato. Al tempo t in cui i fotoni raggiungono il
pavimento, questo sarà stato accelerato a velocità
u “ at “ |~g |t
quindi, poiché t “ h{c
u“
|~g |h
c
65
(5.9)
(5.10)
~a =
~g
~g
h
~v = ~at
Figura 23: Ascensore stazionario in un campo gravitazionale uniforme ~g (sinistra)
e ascensore soggetto ad accelerazione uniforme ~a “ ´~g (destra). In base al principio di equivalenza di Einstein, un osservatore posto dentro l’ascensore non è in
grado di capire in quale dei due casi si trovi.
Per e↵etto Doppler l’onda è osservata dal pavimento a frequenza maggiore
di quella a cui è stata emessa dal soffitto e, al primo ordine in u{c, si ha
ˆ
˙
´
u¯
|~g |h
1
⌫ “⌫ 1`
“⌫ 1` 2
(5.11)
c
c
~ , con
Dal momento che ~g è costante e ~g “ ´r
si può scrivere
|~g | “ ´
quindi
ˆ
⌫ “⌫ 1´
1
ovvero
ˆ
⌫ “⌫ 1´
1
potenziale gravitazionale,
(5.12)
h
h
S
h
S
c2
c2
˙
˙
(5.13)
(5.14)
Questa è la formula del “redshift gravitazionale” zg nel limite “Newtoniano”.
Ricordando che
⌫ ´ ⌫1
o´ e
zg “
“
(5.15)
⌫
e
66
si ottiene infime
zg “
(5.16)
c2
Poichè nel nostro caso il fotone passa da soffitto a pavimento,
† 0 che implica zg † 0, ovvero un blueshift. Se la luce si fosse propagata dal pavimento
al soffitto avremmo ottenuto l’e↵etto opposto ovvero un redshift. Quindi la
frequenza delle onde elettromagnetiche dipende dal campo gravitazionale in
cui si propagano.
Un test di zg fu proposto da Eddington nel 1924: il valore di zg per le
righe nello spettro di una nana bianca, Sirio B, doveva essere pari a c zg “
20 km s´1 . Nel 1925 Adams misurò un valore di 19 km s´1 .
Consideriamo adesso l’espressione trovata in precedenza
ˆ
˙
1
⌫ “⌫ 1´ 2
(5.17)
c
ed esprimiamola in funzione dei periodi ricordando che
ˆ
˙
1
1
“
1´ 2
T1
T
c
ovvero
T
T “`
1´
1
L’espressione
c2
ˆ
˘ »T 1`
ˆ
T “T 1`
1
c2
c2
{c2 ! 1
˙
˙
(5.18)
(5.19)
(5.20)
è la stessa della dilatazione dei tempi tra sistemi di riferimento inerziali
in relatività speciale. Questa espressione deve valere esattamente per ogni
intervallo temporale per cui, in generale, si deve avere
ˆ
˙
1
dt “ dt 1 ` 2
(5.21)
c
Assumiamo adesso che p8q “ 0 e teniamo conto del fatto che
p8q allora
ˆ
˙2
prq
12
2
dt “ dt 1 ` 2
c
“ prq ´
(5.22)
e, poichè prq{c2 ! 1 si ha infine
ˆ
˙
prq
dt “ dt 1 ` 2 2
c
12
2
67
(5.23)
Se consideriamo l’espressione Newtoniana per generato da una massa puntiforme M
GM
prq “ ´
(5.24)
r
si ottiene
ˆ
˙
GM
12
2
dt “ dt 1 ´ 2 2
(5.25)
rc
e quindi, data la metrica di Minkowski ds2 “ dt1 2 ´1{c2 dl2 , possiamo scrivere
ˆ
˙
2GM
1
2
2
ds “ dt 1 ´
´ 2 dl2
(5.26)
2
rc
c
I coefficienti della metrica diventano ben più complessi di quelli dello spazio
tempo di Minkowski quando si tenta di considerare l’e↵etto della gravità!
Si noti come dt1 , dl sono il tempo e lo spazio misurati da un osservatore in
un punto del campo gravitazionale, mentre dt è l’intervallo di tempo misurato
dall’osservatore all’infinito.
5.2
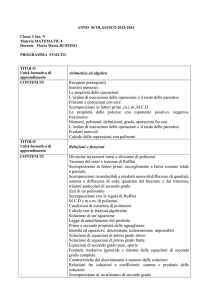
Esempio 2: la curvatura dei raggi di luce
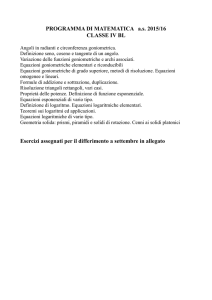
Abbiamo appena visto come il principio di equivalenza porti al cambiamento
di dt nella metrica. Vediamo adesso come anche dl debba cambiare. Utilizziamo nuovamente il principio di equivalenza e sostituiamo un ascensore
stazionario nel campo ~g con uno in un campo gravitazionale nullo ma uniformemente accelerato con ~a “ ´~g . Consideriamo un raggio di luce che si
propaga orizzontalmente una parte all’altra dell’ascensore.
Nel tempo t in cui il raggio percorre la distanza l per andare da un lato
all’altro, l’ascensore si muove diverso l’alto di un tratto
1
l “ gt2
2
(5.27)
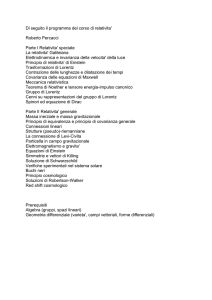
pertanto, nel riferimento dell’ascensore il raggio di luce compie un percorso
parabolico. Supponiamo di poter approssimare il percorso parabolico con un
arco di circonferenza di raggio R (figura 25). Allora risulta
1
“ |~g |t2
2
d sin
poichè
! 1, sin
«
e quindi dall’equazione precedente si ottiene
“
|~g |t2
2d
68
(5.28)
~a =
l
~g
1 2
gt
2
~g
Figura 24: Ascensore stazionario in un campo gravitazionale uniforme ~g (sinistra)
e ascensore soggetto ad accelerazione uniforme ~a “ ´~g (destra). In base al principio di equivalenza di Einstein, un osservatore posto dentro l’ascensore non è in
grado di capire in quale dei due casi si trovi.
~a =
~g
l
1 2
gt
2
d
1 2
gt
2
1 2
gt
2
2
Figura 25: Geometria della propagazione della luce nell’ascensore uniformemente
accelerato.
69
Confondendo l’arco con la corda, il raggio di curvatura della traiettoria R è
dato da
d2
d2
d4
2
R2 » 2 “
4d
“
(5.29)
4
4|~g |2 t4
|~g |2 t4
Si può anche scrivere che
d cos
poichè cos
“ l Ñ d « l “ ct
(5.30)
« 1. Infine si ottiene
R2 “
4
c4 tS
S
4
|~g |2 tS
S
(5.31)
ovvero
R“
c2
|~g |
(5.32)
con R raggio di curvatura del raggio di luce. Quanto trovato per il riferimento
uniformemente accelerato è perfettamente equivalente a quello che succede
nel riferimento nel campo gravitazionale uniforme. Se ne conclude che il
cammino della luce dipende dall’accelerazione gravitazionale locale ~g . Poichè
questa dipende dal gradiente del potenziale gravitazionale ne consegue che il
cammino dei raggi di luce dipende dalla distribuzione di massa.
5.3
Alcuni concetti utili
Prima di procedere oltre ed arrivare a scrivere le equazioni di Einstein che
legano la metrica dello spazio tempo alla distribuzione di massa-energia,
dobbiamo richiamare alcuni concetti matematico-geometrici.
~ è un vettore nello spazio tridimensionale, posso definire il quadriSe A
vettore nello spazio tempo
~ “ pA0 , A1 , A2 , A3 q
Aµ “ pA0 , Aq
(5.33)
con A0 componente temporale e A1 , A2 , A3 componenti spaziali del vettore
~ Quando il quadrivettore è indicato con Aµ (indice in alto) si intende
A.
rappresentato in componenti controvarianti, ovvero quelle componenti che
si trasformano come il vettore spostamento di↵erenziale per un cambio di
coordinate.
Se gµ⌫ è il tensore metrico si ha
ds2 “ gµ⌫ dxµ dx⌫
70
(5.34)
dove si è usata la convenzione di Einstein, in base alla quale gli indici ripetuti
rappresentano una somma: nel caso di ds2 l’espressione è equivalente a
4 ÿ
4
ÿ
2
ds “
gµ⌫ dxµ dx⌫
(5.35)
µ“0 ⌫“0
dxµ è il quadrivettore spostamento infinitesimo.
Il tensore metrico determina il modo di calcolare il prodotto scalare tra
due (quadri)vettori che è quindi legato alla metrica:
A ¨ B “ gµ⌫ Aµ B ⌫
(5.36)
Il tensore metrico permette anche di ottenere le componenti covarianti
di un vettore ovvero quelle che si trasformano come l’operatore gradiente di
funzione per un cambio di coordinate:
Aµ “ gµ⌫ A⌫
(5.37)
quindi il tensore metrico gµ⌫ serve anche ad “abbassare” gli indici. Esistono
anche le componenti controvarianti del tensore metrico tali che
Aµ “ g µ⌫ A⌫
(5.38)
µ
(5.39)
e ovviamente deve risultare
g µ⌫ g⌫ “
con µ delta di Kronecker ( µ “ 1 se µ “ , µ “ 0 se µ ‰ ). In
sostanza, le componenti controvarianti e covarianti del tensore metrico sono
l’una l’inverse dell’altra.
Consideriamo adesso una trasformazione di coordinate x Ñ x1 .
1
⇤µµ
1
Bxµ
“
Bxµ
(5.40)
dove ⇤ è lo Jacobiano non singolare della trasformazione. Con una notazione
più compatta si può scrivere
1
⇤µµ “ Bµ xµ
e l’operatore gradiente
Bµ “
è dato in componenti covarianti.
B
Bxµ
71
1
(5.41)
(5.42)
Data questa definizione di Jaocobiano di una trasformazione di coordinate
si può quindi dire che Aµ è un quadrivettore se e solo se si trasforma come
1
1
Aµ “ ⇤µµ Aµ
(5.43)
Un tensore è un oggetto a più indici che si trasforma con una combinazione
di Jacobiani in modo da trasformare ogni indice come per un quadrivettore.
Per esempio si può scrivere
1
1
M µ⌫ 1 “ ⇤µµ ⇤⌫⌫ 1 M µ⌫
(5.44)
Come già detto gµ⌫ è un tensore quindi, date le proprietà dei tensori, è
facile verificare che
ds2 “ gµ⌫ dxµ dx⌫
(5.45)
è un invariante scalare.
5.4
Le equazioni di campo di Einstein
Ricordiamo adesso le basi su cui Einstein ha fondato la Relatività Generale:
1. il Principio di Relatività (covarianza delle leggi della natura per trasformazione di coordinate)
2. il Principio di Equivalenza (cancellazione locale della gravità in un
sistema non inerziale)
3. il Principio di Mach (gµ⌫ dipende dalla distribuzione di massa-energia).
Consideriamo una particella che si muove liberamente sotto l’azione delle sole forze gravitazionali; per il principio di equivalenza deve esistere un
sistema di riferimento di coordinate localmente inerziali ⇠ ↵ per le quali valga
d2 ⇠ ↵
“0
d⌧ 2
(5.46)
con ⌧ tempo proprio e d2 ⇠ ↵ {d⌧ 2 quadriaccelerazione che è ovviamente nulla
per come abbiamo scelto il riferimento ⇠ ↵ .
In un qualsiasi riferimento xµ il moto dovuto alle sole forze gravitazionali
risulta essere
d 2 xµ
dxµ dx⌫
`
“0
(5.47)
µ⌫
d⌧ 2
d⌧ d⌧
72
dove d2 xµ {d⌧ 2 è la quadriaccelerazione ed il secondo termine, che svolge il
ruolo di forza gravitazionale, deriva dal cambiamento di coordinate ⇠ ↵ Ñ xµ
esprimibile come
B⇠ ↵
⇠ ↵ “ ⇤ ↵ µ xµ “ µ xµ
(5.48)
Bx
La soluzione dell’equazione 5.47 fornisce l’equazione della geodetica nel riferimento xµ . µ⌫ prende il nome di connessione affine ed è data da
“
µ⌫
Bx B 2 ⇠ ↵
B⇠ ↵ Bxµ Bx⌫
(5.49)
B⇠ ↵ B⇠
Bxµ Bx⌫
(5.50)
Se ⌘↵ è il tensore metrico di Minkowski nel sistema di riferimento ⇠ ↵ , in cui
vale la Relatività Speciale per la totale assenza di forze, il tensore metrico
gµ⌫ nello spazio di coordinate xµ è dato dalla trasformazione
gµ⌫ “ ⌘↵
questa espressione permette di ottenere gµ⌫ a partire da ⌘↵ e dalla trasformazione di coordinate. Si può infine dimostrare che la connessione affine µ⌫
è esprimibile con i Simboli di Christo↵el
µ⌫
1
“ g
2
pBµ g
⌫
` B⌫ g
µ
´ B gµ⌫ q
(5.51)
Adesso dobbiamo cercare una relazione tensoriale che leghi la metrica,
ovvero il tensore metrico gµ⌫ e le sue derivate alla distribuzione di materia
ed energia che posso rappresentare con il tensore energia-impulso.
Si può dimostrare che, a partire dal tensore metrico gµ⌫ e dalle sue derivate prime e seconde può essere costruito un solo tensore, detto Tensore di
curvatura di Riemann
R
µ⌫
“ B⌫
µ
´B
µ⌫
`
⌘
µ
⌘⌫
´
⌘
µ⌫
⌘
(5.52)
A partire dal tensore di curvatura di Riemann si possono poi ritrovare per
contrazione il Tensore di Ricci:
Rµ⌫ “ R
µ ⌫
(5.53)
e la Curvatura scalare
R “ Rµµ “ g µ⌫ Rµ⌫
(5.54)
Il tensore che descrive la geometria dello spazio tempo è quindi il Tensore
di Einstein
1
Gµ⌫ “ Rµ⌫ ´ gµ⌫ R
(5.55)
2
73
Adesso dobbiamo ottenere la distribuzione di massa-energia che è esprimibile tensorialmente col Tensore Energia-Impulso. Se si considera un fluido
con densità ⇢ e pressione p (entrambe grandezze comoventi) si ha
Tµ⌫ “ p⇢c2 ` pq uµ u⌫ ´ pg µ⌫
(5.56)
con uµ quadrivelocità.
Le equazioni di Einstein sono finalmente
Gµ⌫ “
8⇡G
Tµ⌫
c2
(5.57)
ovvero
1
8⇡G
Rµ⌫ ´ gµ⌫ R “ 2 Tµ⌫
(5.58)
2
c
Dopo aver formulato queste equazioni Einstein si rese conto che era possibile aggiungere un termine costante ⇤ che avrebbe poi potuto permettere
l’esistenza di un universo stazionario:
1
8⇡G
Rµ⌫ ´ gµ⌫ R “ 2 Tµ⌫ ` ⇤gµ⌫
2
c
(5.59)
Si noti come in questa equazione tensoriale ci sono solo 6 equazioni indipendenti sulle 16 equazioni totali. Da 16 si passa a 10 perché i tensori metrici
(e quindi tutti i derivati) sono simmetrici; inoltre 4 sono ridondanti per le
proprietà di Rµ⌫ . Il tensore metrico ha però 10 componenti indipendenti incognite, pertanto abbiamo a disposizione solo 6 equazioni per 10 incognite.
La presenza di 4 gradi di libertà incogniti porta ad una invarianza di gauge
per la scelta del riferimento.
Vediamo adesso di intuire come mai le equazioni hanno quella forma. E’
chiaro che le equazioni di Einstein nel limite Newtoniano devono fornire, tra
le altre, l’equazione di Poisson. Quando abbiamo ottenuto l’espressione per
il redshift gravitazionale nel limite Newtoniano avevamo trovato
ˆ
˙
2
dl2
2
2
ds “ dt 1 ` 2 ´ 2
(5.60)
c
c
per cui
ˆ
˙
2
g00 “ 1 ` 2
c
1
“ pg00 ´ 1q c2
2
(5.61)
(5.62)
L’equazione di Poisson è
r2 “ 4⇡G⇢
74
(5.63)
ovvero
1
r2 “ c2 r2 g00
(5.64)
2
Il tensore energia impulso di un fluido comovente (cioè che non ha velocità
propria rispetto all’espansione dell’universo) ha solo il termine T00 ‰ 0 e, nel
caso di p “ 0, si ha
⇠
T 00 “ p⇢c2 ` pq 2 ´ ⇠
pg⇠
(5.65)
00
ovvero
⇢“
sostituendo otteniamo
T 00
T 00
»
2 c2
c2
per
v
!1
c
1 2 2
T 00
c r g00 “ 4⇡G 2
2
c
(5.66)
(5.67)
ovvero
8⇡G 00
T
c4
che ricorda la componente 00 delle equazioni di Einstein.
In conclusione, le equazioni di campo di Einstein
r2 g00 “
1
8⇡G
Rµ⌫ ´ gµ⌫ R “ 2 Tµ⌫ ` ⇤gµ⌫
2
c
(5.68)
(5.69)
sono 6 equazioni non lineari indipendenti. Il procedimento da seguire per
arrivare alla loro soluzione è il seguente:
1. si sceglie una forma del tensore metrico che contenga in sé le eventuali simmetrie del sistema (si ricorda che non è possibile risolvere il
problema se tutte le 10 componenti del tensore simmetrico gµ⌫ sono
incognite);
2. si determina la forma del tensore energia-impulso che descrive le sorgenti del campo proprie del problema;
3. si scrivono le equazioni di Campo di Einstein ottenendo un sistema di
equazioni di↵erenziali nelle funzioni incognite presenti in gµ⌫ ;
4. la loro soluzione permette di determinare gµ⌫ da cui si ottiene la geometria dello spazio e le equazioni geodetiche che determinano il moto.
75
5.5
Derivazione delle equazioni di Friedmann
Prima di procedere è opportuno vedere quali siano le convenzioni relative ai
segni. La metrica di Minkowski è
⌘ µ⌫ “ rS1s ˆ diagr´1, 1, 1, 1s
(5.70)
con rS1s segnatura della metrica di Minkowksi che può essere pari a `1 o
´1. diagr´1, 1, 1, 1s indica la matrice con i valori p´1, 1, 1, 1q sulla diagonale.
Il tensore di curvatura di Riemann ha segnatura rS2s tale che
`
˘
Rµ⌫⇢ “ rS2s ˆ B µ⌫⇢ ´ B⇢ µ⌫ ` µ ⌫ ⇢ ´ µ⇢ ⌫
(5.71)
Il tensore di Ricci è
↵
Rµ⌫ “ rS2s ˆ rS3s ˆ Rµ↵⌫
(5.72)
per cui le equazioni di Einstein sono
Gµ⌫ “ Rµ⌫
1
´ gµ⌫ R “ rS3s ˆ
2
ˆ
8⇡G
Tµ⌫ ` ⇤gµ⌫
c2
˙
(5.73)
Fino ad ora abbiamo usato la convenzione
rS1s “ ´1
rS2s “ `1
rS3s “ `1
che porta alle equazioni di Einstein nella forma
1
8⇡G
Rµ⌫ ´ gµ⌫ R “ 2 Tµ⌫ ` ⇤gµ⌫
2
c
(5.74)
Cominciamo adesso a esplicitare queste equazioni. Abbiamo visto come
per uno spazio omogeneo ed isotropo in espansione uniforme la metrica più
generale è quella di Robertson e Walker
´ r ¯`
˘ı
aptq2 ”
ds2 “ dt2 ´ 2 dr2 ` R2 sin2
d✓2 ` sin2 ✓d 2
c
R
Il tensore metrico, scritto in forma di matrice è pertanto
¨
1
0
0
0
2
˚
a
ptq
˚ 0 ´
0
0
˚
c2
˚
´
¯
2
gµ⌫ “ ˚
a ptq
r
˚ 0
0
´ 2 R2 sin2
0
˚
c
R
´r¯
2
˝
a ptq
0
0
0
´ 2 R2 sin2
sin2 ✓
c
R
76
˛
‹
‹
‹
‹
‹
‹
‹
‚
Per ottenere le componenti controvarianti si può facilmente calcolare
l’inverso del tensore in componenti covarianti
¨
1
0
0
0
2
˚
c
˚ 0 ´
0
0
˚
a2 ptq
˚
´r¯
c2
g µ⌫ “ pgµ⌫ q´1 “ ˚
2
˚ 0
0
´
csc
0
˚
R2 a2 ptq
R
˚
´r¯
˝
c2
0
0
0
´ 2 2 csc2
csc2 ✓
R a ptq
R
A questo punto, per prima cosa, si calcolano i Simboli di Christo↵el a
partire da gµ⌫ e per rappresentare il risultato si utilizza la convenzione che
1
µ
“ 3 (gli indici assumono i valori
23 corrisponde a
⌫ con µ “ 1, ⌫ “ 2,
0,1,2,3), i simboli di Christo↵el non nulli sono soltanto
0
0
0
1
1
1
9
aptqaptq
c2
11
“
22
R2 aptq sin2
“
c2
R2 aptq sin2
33
“
10
“
22
1
“ ´ R sin
2
33
1
“ ´ R sin
2
`r˘
R
`r˘
R
c2
9
aptq
9
sin2 ✓ aptq
9
aptq
aptq
ˆ
ˆ
77
2r
R
2r
R
˙
˙
sin2 ✓
˛
‹
‹
‹
‹
‹
‹
‹
‹
‚
2
2
2
3
3
3
20
21
9
aptq
aptq
` ˘
cot Rr
“
R
“
33
“ ´ cos ✓ sin ✓
30
“
31
32
aptq
9
aptq
` ˘
cot Rr
“
R
“ cot ✓
Si calcola quindi il tensore di Riemann e si riportano i risultati tenendo
conto della stessa convenzione utilizzate per i . Considerando R1 213 è possibile ottenere R1 231 usando l’antisimmetria per lo scambio degli ultimi due
indici anche se questa cosa non è evidente perché riportiamo le R µ⌫ invece
delle R µ⌫ ; gli elementi del tensore da cui si ottengono tutti gli elementi non
nulli sono soltanto:
aptq:aptq
c2
` ˘
R2 sin2 Rr aptq:aptq
“ ´
c2
` ˘
R2 sin2 Rr sin2 ✓ aptq:aptq
“ ´
c2
R0 110 “ ´
R0 220
R0 330
R
1
R
1
010
221
:ptq
a
“ ´
aptq
“ ´
R1 331 “ ´
sin2
sin2
`r˘
R
`r˘
R
pc2 ` R2 a9 2 ptqq
c2
sin2 ✓ pc2 ` R2 a9 2 ptqq
c2
78
(5.75)
R2 020 “ ´
:ptq
a
aptq
a9 2 ptq
1
`
R2
c2
` ˘
sin2 Rr sin2 ✓ pc2 ` R2 a9 2 ptqq
“ ´
c2
R2 121 “
R2 332
R3 030 “ ´
:ptq
a
aptq
1
a9 2 ptq
`
R2
c2
` ˘
sin2 Rr pc2 ` R2 a9 2 ptqq
3
R 232 “
c2
Si calcolano quindi tensore e scalare di Ricci dalle contrazioni successive
del tensore di Curvatura di Riemann. Le forme non nulle del tensore di Ricci
sono quelle diagonali:
R3 131 “
R00 “ ´
3:aptq
aptq
2
2a9 2 ptq aptq:aptq
`
`
R2
c2
c2
` ˘
sin2 Rr p2c2 ` 2R2 a9 2 ptq ` R2 aptq:aptqq
“
c2
` ˘
sin2 Rr sin2 ✓ p2c2 ` 2R2 a9 2 ptq ` R2 aptq:aptqq
“
c2
R11 “
R22
R33
mentre per lo scalare di Ricci abbiamo
R“´
6 pc2 ` R2 a9 2 ptq ` R2 aptq:aptqq
R2 a2 ptq
Questo ci permette di ottenere il tensore di Einstein Gµ⌫ ovvero il primo
79
membro delle equazioni di Einstein.
G00 “
3 pc2 ` R2 a9 2 ptqq
R2 a2 ptq
1
a9 2 ptq 2aptq:aptq
´
´
R2
c2
c2
` ˘
sin2 Rr pc2 ` R2 a9 2 ptq ` 2R2 aptq:aptqq
“ ´
c2
` ˘
sin2 Rr sin2 ✓ pc2 ` R2 a9 2 ptq ` 2R2 aptq:aptqq
“ ´
c2
G11 “ ´
G22
G33
Andiamo adesso a determinare il secondo membro delle equazioni di Einstein.
Il tensore energia-impulso è
T µ⌫ “ p⇢c2 ` pquµ u⌫ ´ pg µ⌫
(5.76)
La quadrivelocità è data da
vi
c
e, se prendiamo un fluido comovente (stazionario), avremo
u⌫ “ p1, ux , uy , uz q
ui “
u x “ u y “ uz “ 0
“ 1
u⌫ “ p1, 0, 0, 0q
ovvero utilizzando l’espressione per g µ⌫ trovata prima, si ottiene in componenti controvarianti
»
fi
1 0 0 0
— 0 0 0 0 ffi
µ⌫
ffi
T µ⌫ “ p⇢c2 ` pq —
(5.77)
– 0 0 0 0 fl ´ pg
0 0 0 0
ovvero
¨ 2
˛
c⇢
0
0
0
˚
‹
c2 p
˚ 0
‹
0
0
2
˚
‹
a ptq
`
˘
˚
‹
r
2
2
µ⌫
‹
c p csc R
T “˚
˚ 0
‹
0
0
˚
‹
2
2
R
a
ptq
˚
‹
`r˘
2
2
2
˝
c p csc R csc ✓ ‚
0
0
0
R2 a2 ptq
80
Si noti come il secondo membro delle equazioni di Einstein in coordinate
controvarianti diventi
¨
˛
1 0 0 0
˚ 0 0 0 0 ‹ 8⇡G µ⌫
8⇡G µ⌫
8⇡G 2
µ⌫
µ⌫
˚
‹
T
`
⇤g
“
p⇢c
`
pq
˝ 0 0 0 0 ‚´ c2 pg ` ⇤g
c2
c2
0 0 0 0
ovvero ⇤ appare come un contributo di pressione negativa.
Si passa quindi a componenti covarianti del tensore Energia-Impulso
Tµ⌫ “ gµ g⌫ T
(5.78)
ottenendo
¨
Tµ⌫
c2 ⇢
˚
˚ 0
˚
˚
“˚
˚ 0
˚
˝
0
0
pa2 ptq
c2
0
0
0
0
pR2 a2 ptq sin2
c2
0
0
`r˘
R
˛
‹
‹
‹
‹
‹
‹
0
‹
`
˘
pR2 a2 ptq sin2 Rr sin2 ✓ ‚
c2
0
Ovviamente, le componenti covarianti e controvarianti della matrice unitaria
sono uguali.
Come si può facilmente notare scrivendo le Equazioni di Einstein
Gµ⌫ “
8⇡G
Tµ⌫ ` ⇤gµ⌫
c2
(5.79)
solo i termini diagonali sono non nulli ovvero abbiamo ottenuto quattro
equazioni per aptq:
ˆ 2
˙
3
c
2
` a9 ptq ´ p⇤ ` 8⇡G⇢q “ 0
a2 ptq R2
˘
1
a9 2 ptq 2aptq:aptq
1 `
´ 2´ 2 ´
` 4 ´8⇡Gp ` c2 ⇤ a2 ptq “ 0
2
R ` ˘c
c
c
‰
sin2 Rr “ 4
´
c ` c2 R2 a9 2 ptq ` 2c2 R2 aptq:aptq ` R2 p8⇡Gp ´ c2 ⇤qa2 ptq “ 0
4
c` ˘
2 r
“ 4
‰
sin R
2
2 2 2
2 2
2
2
2
9
´
sin
✓
c
`
c
R
a
ptq
`
2c
R
aptq:
a
ptq
`
R
p8⇡Gp
´
c
⇤qa
ptq
“0
c4
(5.80)
81
Dove le parentesi con G e ⇤ sono chiaramente il contributo del secondo
membro delle Equazioni di einstein (tensore energia impulso e costante cosmologica). Le ultime due equazioni sono chiaramente equivalenti. Dalla
prima si ottiene
a9 2 ptq “
8⇡G⇢ 2
c2
1
a ptq ´ 2 ` ⇤a2 ptq
3
R
3
(5.81)
9 2 nella seconda si ottiene invece
sostituendo aptq
1◆ 8⇡G⇢ A2
1◆ 1 ⇤
´ ◆2 ´
a ptq ` ◆2 ´ 2 aA2 ptq
2
R
3c
R
3c
◆
◆
⇢
⇢
2 aptq:aptq 8⇡Gp A2
⇤aA2 ptq
´ ⇢ 2
´
a
ptq
`
“0
c
c4
c2
(5.82)
ovvero, raccogliendo,
4⇡G
:ptq “ ´
a
3
ˆ
˙
3p
1
⇢ ` 2 aptq ` ⇤aptq
c
3
(5.83)
Si può verificare che sostituendo a9 2 ptq dalla prima equazione nella terza
si ritrova la seconda equazione. In conclusione abbiamo trovato solo due
equazioni indipendenti:
8⇡G⇢ 2
c2
1
a ptq ´ 2 ` ⇤a2 ptq
3
R
3
ˆ
˙
4⇡G
3p
1
:ptq “ ´
⇢ ` 2 aptq ` ⇤aptq
a
3
c
3
a9 2 ptq “
(5.84)
che sono finalmente le equazioni che volevamo ottenere. La 6.2 è “l’Equazione
di Friedmann”, ma nel seguito ci riferiremo a entrambe come “Equazioni di
Friedmann”.
82