Le isometrie del piano (DESM-DM 2014/2015)
Attenzione: per completezza di lettura sono incluse alcune nozioni sulla teoria dei gruppi che
non sono state svolte a lezione e non verranno richieste all’esame: esse hanno quindi carattere
facoltativo, come facoltativi ai fini dell’esame sono anche i passaggi presenti in queste note
riguardanti il concetto di gruppo.
Definizione. Un'isometria del piano è una trasformazione biunivoca del piano in sé che
conserva la distanza.
Può essere data una definizione analoga per le isometrie nello spazio: basta sostituire nella
precedente alla parola “piano” la parola “spazio”. Noi ci limiteremo a considerare isometrie nel
piano anche quando non esplicitamente detto.
Tra i numerosi testi sull’argomento, si possono suggerire:
Maria Dedò, Trasformazioni geometriche con un’introduzione al modello di Poincaré, DecibelZanichelli, Padova-Bologna, 1996, pp. v-153;
Vinicio Villani, Cominciamo dal punto, Pitagora Editrice, Bologna, 2006, pp.iii-313.
Questi testi contengono sia maggiori e più approfondite informazioni sugli argomenti in queste
note, sia estensioni degli stessi allo spazio ed altri tipi di trasformazioni geometriche qui non
considerate.
Osservazione. Se f indica la trasformazione, dire che f conserva la distanza, significa dire che
d(f(P),f(Q))=d(P,Q) per ogni coppia di punti P, Q.
Esercizio. Le isometrie formano un gruppo con l'operazione di composizione.
In particolare l’applicazione identità, id(P)=P, per ogni punto P è una isometria ed è l’elemento
neutro del gruppo delle isometrie e data un’isometria f la sua inversa insiemistica f -1 è
un’isometria.
Traccia. Si noti che la composizione f◦g di due isometrie f, g è un’isometria: infatti
d((f◦g)(P), (f◦g)(Q)) = d(f(g(P)), (f(g(Q)) = d(f(P)), (f(Q)) = d(P, Q).
Dato che un’isometria f è un’applicazione biunivoca, resta ben definita l’applicazione inversa f -1
che è quell’applicazione data da f-1(Q) = P dove Q è il punto f(P): f è, per così dire,
l’applicazione che fa ritornare al punto di partenza, f◦ f-1 = f-1◦ f = id.
Si invita a svolgere le verifiche con il maggior numero possibile di dettagli. La nozione di
gruppo è richiamata in appendice a queste note.
Riflessioni (o simmetrie assiali).
Una riflessione in una retta r (o simmetria assiale di asse r) è l'applicazione σr che ad ogni
punto P associa il punto P’= σr(P) tale che la retta r sia l'asse del segmento di estremi P e P’
con la convenzione che P’ = σr(P) = P se P r.
1
Si può dimostrare che ogni simmetria è un’applicazione biunivoca che conserva le distanze
(ossia è un’isometria) e, come al solito, si invita a svolgere le varie verifiche nel modo più
accurato possibile.
Si osservi che una simmetria assiale applicata due volte, una di seguito all’altra, è l’identità:
σr2 (P) = (σr◦ σr)(P) = σr(σr(P)) = σr(P’) = P quindi σr2 = id (questa proprietà si esprime
dicendo che σr è un’involuzione).
Ne segue che σr-1 = σr: quindi σr è l’inversa di se stessa.
Ogni punto della retta r è trasformato in se stesso da σr, i punti di ciascuna retta
perpendicolare alla retta r sono mandati sulla retta stessa. La retta r e quelle ad essa
perpendicolari sono rette fisse per σr ma mentre r lo è punto per punto, quelle perpendicolari lo
sono solo globalmente.
Definizione. Data un’isometria f del piano, un sottoinsieme S del piano è fisso (o unito o
invariante) per f se f(S)=S: ossia se viene trasformato in se stesso da f.
Come nel caso delle riflessioni S può essere fisso punto per punto oppure globalmente.
Una riflessione di asse r non ha altre rette fisse tranne l’asse r e le rette ad esso
perpendicolari.
Definizione. Un sottoinsieme S del piano è simmetrico rispetto ad una retta r giacente nel
piano stesso, se S è fisso rispetto a σr, la simmetria assiale di asse r. La retta r si dice asse di
simmetria di S.
Esercizi.
1. Il cerchio è simmetrico rispetto ad ogni retta passante per il suo centro.
2. Un triangolo isoscele, non equilatero, ha un unico asse di simmetria: l’asse del
segmento di base. Un triangolo equilatero ha esattamente tre assi di simmetria nel suo
piano: gli assi dei tre lati.
3. Un quadrato ha quattro assi di simmetria: le due diagonali che uniscono vertici opposti
e le due rette che uniscono i punti medi dei lati opposti (sono gli assi dei lati, si noti
2
che gli assi di lati opposti coincidono).
4. Un pentagono regolare ha cinque assi di simmetria: i cinque assi dei segmenti.
5. Un esagono regolare ha sei assi di simmetria: le tre rette che uniscono vertici opposti e
gli assi dei lati che a due a due coincidono e quindi sono tre.
6. Un poligono regolare con n lati ha n assi di simmetria. Se n è dispari …. Se n è pari ….
7. Determinare tutte le lettere dell’alfabeto che possono essere scritte in modo simmetrico
rispetto a qualche asse.
Esercizio. Sia h un’isometria con due punti fissi distinti A, B e siano t la retta che passa per
essi e σt la riflessione nella retta t. Se P punto del piano, allora h(P) = P oppure h(P) = σt(P);
quindi se P appartiene a t è fisso e se t non appartiene a t, allora è fisso oppure è trasformato
nel suo simmetrico rispetto a t.
Traccia. Se P è un altro punto del piano, h(P) e P devono avere le stesse distanze da A e da B,
e quindi devono trovarsi entrambi nell’intersezione delle circonferenze di centri A e B e raggi
d(A, P) e d(B, P). Le due circonferenze possono avere un unico punto in comune (tangenti) o
due punti distinti (di cui uno è P) simmetrici rispetto a t. Nel primo caso le P appartiene a t e
nel secondo caso P può essere solo fisso o trasformato nell’altro punto di intersezione che è il
suo simmetrico rispetto a t.
Esercizio. Se un’isometria h ha tre punti fissi non allineati A, B, C, allora è l’identità.
Traccia. Segue dall’esercizio precedente prendendo a due a due i punti A, B, C. Se esistesse
un punto P non fissato da h, allora i punti A, B, C sarebbero allineati.
Esercizio. Se un’isometria h ha due punti fissi A, B, allora è l’identità oppure la simmetria
assiale di asse la retta t passante per A e per B.
Traccia. Segue dai precedenti: t è una retta di punti fissi. Se c’è un ulteriore punto fisso C, h è
l’identità, altrimenti se nessun ulteriore punto è fisso, viene mandato da h nel suo simmetrico
rispetto alla retta t, ma allora h = σt.
3
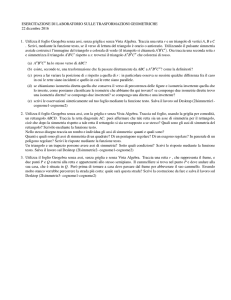
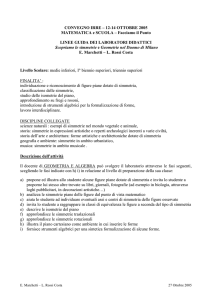
Esempio. Si consideri il quadrato ABCD
e siano r ed s rispettivamente le rette per AB e per AD e D’ simmetrico di D rispetto alla retta
r.
Si ha: σs(σr(B)) = σs(B) = D (infatti σr(B) = B), mentre σr(σs(B)) = σr(D) = D’.
Quindi σs◦ σr ≠ σr◦ σs, allora il gruppo delle isometrie piane non è commutativo.
Inoltre l’insieme di tutte le riflessioni non è un sottogruppo del gruppo delle isometrie, anzi non
è nemmeno chiuso rispetto alla composizione: componendo due riflessioni non si ottiene una
riflessione.
Osservazione. Ogni riflessione inverte l’orientazione del piano. Ne segue che la
composizione di un numero pari qualsiasi di riflessioni lascia inalterata l’orientazione del piano,
mentre un numero dispari qualsiasi l’inverte. Isometrie che lasciano inalterata l’orientazione
dello spazio si dicono dirette, altrimenti inverse. Le riflessioni sono isometrie inverse.
4
Percorrendo il quadrato superiore in senso orario, il suo corrispondente inferiore è percorso in
senso antiorario. Per così dire, le riflessioni non si possono realizzare “fisicamente” come
trasformazioni isometriche “restando dentro il piano”, ma solo uscendo da esso, ad esempio
mediante un “ribaltamento”.
Si noti allora che la composizione di un numero pari qualsiasi di simmetrie assiali è
un’isometria diretta, mentre la composizione di un numero dispari qualsiasi di simmetrie assiali
è un’isometria inversa.
Traslazioni.
v che ad ogni punto P del piano associa il punto
P’=v(P) tale che il segmento orientato di origine P e termine v(P) rappresenti il vettore v.
La traslazione di vettore v, è l’applicazione
Come esercizio si provi a dimostrare, nel modo più accurato possibile, che si tratta di
un’isometria. Si noti che le traslazioni si identificano con i vettori che le definiscono e che alla
composizione fra traslazioni corrisponde la somma di vettori. Quindi anche l’insieme delle
traslazioni nel piano è un sottogruppo commutativo del gruppo (non commutativo) delle
isometrie. L’elemento neutro (la trasformazione identità) corrisponde alla traslazione associata
al vettore nullo.
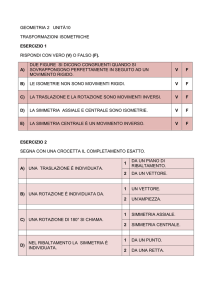
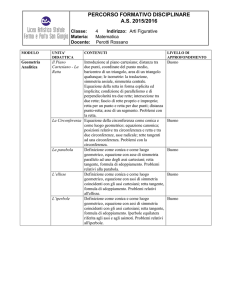
Teorema. La composizione σs◦ σr di due riflessioni con assi paralleli r, s è una traslazione di
vettore w = 2 v, dove v è il vettore ortogonale ad r e s orientato in modo tale che scelta come
origine per un rappresentante di v un punto di r il termine cada su s.
Si provi ad argomentare in base al disegno seguente, dove P’ = σr(P) e P’’= σs(σr(P’)) = σs(P’)
5
Si noti che ancora una volta ritroviamo che la classe delle riflessioni non è chiusa rispetto alla
composizione e quindi non formano un sottogruppo delle isometrie. Le traslazioni sono
isometrie dirette.
Si provi anche ad argomentare quanto asserito nel seguente:
Teorema. Ogni traslazione di vettore w si può ottenere come composizione di due simmetrie
assiali σs◦σr ad assi r ed s paralleli fra loro, ortogonali al vettore w e tali che il vettore v
rappresentato da un segmento orientato con origine su r termine su s ed ortogonale ad
entrambe verifichi w = 2 v. In particolare le traslazioni sono isometrie dirette.
E’ da mettere in evidenza che si possono scegliere infinite coppie di rette verificanti le stesse
proprietà di r ed s. Quali?
Rotazioni.
La rotazione di centro O ed angolo orientato
è l’applicazione O, che ad ogni punto P del
piano associa il punto P’=O, (P) tale che d(O, P) = d(O, P’) e l’angolo (POP’) sia di ampiezza
.
6
Si provi a dimostrare che si tratta di isometrie e che l’insieme delle rotazioni del piano con lo
stesso centro formano un sottogruppo commutativo del gruppo (non commutativo) con
elemento neutro dato dalla rotazione di angolo nullo.
Tuttavia se non si fissa il centro, allora l’insieme delle rotazioni non è un sottogruppo, anzi la
composizione di due rotazioni con centri diversi può non essere una rotazione.
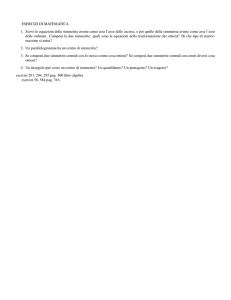
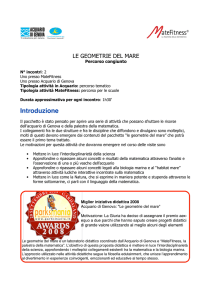
Teorema. La composizione σs◦ σr di due riflessioni con assi incidenti r, s in un punto O è una
rotazione di centro O ed angolo β
= 2 , dove è l’angolo individuato dalle rette r e s
orientato da r verso s.
Come prima si provi ad argomentare sul disegno seguente, dove ancora P’ = σr(P) e P’’=
σs(σr(P’)) = σs(P’)
Vale anche il
Teorema. Ogni rotazione di di centro O ed angolo β si può ottenere come composizione di due
7
simmetrie assiali σs◦ σr ad assi r ed s incidenti in O e formanti un angolo
= β/2. In
particolare le rotazioni sono isometrie dirette.
Anche in questo caso si possono scegliere infinite coppie di rette verificanti le stesse proprietà
di r ed s. Quali?
Esercizi.
1. Quali sono le rotazioni di un triangolo equilatero attorno al centro della circonferenza
circoscritta che portano il triangolo a sovrapporsi esattamente a se stesso?
2. E quelle di un quadrato?
3. E quelle di un pentagono, di un esagono e di un poligono regolare con n lati?
4. Ci sono (e quali sono eventualmente) le rette del piano invarianti in una rotazione?
Esercizio. Un’isometria f con un solo punto fisso 0, è una rotazione attorno ad 0.
Traccia. Sia P è un altro punto e sia P’ = f(P). Dato che d(P’, O) = d(f(P), f(O)) = d(P, O), P’ è
sulla circonferenza di centro O e raggio d(P, 0). Sia allora
l’ampiezza dell’angolo orientato
∢(POP’). Preso un altro punto Q, analogamente a P, Q’ = f(Q) è sulla circonferenza di centro O
e raggio d(Q, 0). Basta mostrare allora che
è anche l’ampiezza dell’angolo orientato ∢(QOQ’)
e per questo basta osservare che i triangoli OPQ e OP’Q’ hanno i lati ordinatamente congruenti
(per via del fatto che f è un’isometria) e quindi sono congruenti per il terzo criterio di
congruenza (LLL), allora anche gli angoli ∢(POQ) e ∢(P’OQ’) sono congruenti. Togliendo ad
entrambi la parte comune ∢(P’OQ), si ha l’asserto.
Simmetrie centrali.
Un caso particolare di rotazione si ottiene quando l’ampiezza è un angolo piatto: si tratta di un
mezzo giro attorno ad un punto 0, o equivalentemente della composizione di due simmetrie
assiali ad assi perpendicolari passanti per O.
8
Non è difficile rendersi conto si tratta di una simmetria centrale di centro O, ossia della
trasformazione σO del piano che ad ogni punto P associa il punto P’ = σO(P) tale che O sia il
punto medio del segmento PP’ con la convenzione che σO(O) = O.
Definizione. Un sottoinsieme S del piano ha un centro di simmetria O, se S è fisso rispetto
a σO la simmetria centrale di centro O.
Esercizi.
1. Il cerchio ha centro di simmetria nel proprio centro
2. Un triangolo equilatero non ha centro di simmetria.
3. Un quadrato ha centro di simmetria: il centro della circonferenza circoscritta nonché
punto comune a tutti gli assi di simmetria.
4. Un pentagono non ha centro di simmetria. Un esagono ha centro di simmetria: come il
quadrato il centro della circonferenza circoscritta nonché punto comune a tutti gli assi di
simmetria. In generale un poligono regolare con n lati non ha centro di simmetria se n è
dispari, mentre ce l’ha se n è pari ed in tal caso è il centro della circonferenza
circoscritta nonché punto comune a tutti gli assi di simmetria.
5. Determinare tutte le lettere dell’alfabeto che possono essere scritte con una simmetria
centrale.
6. Quali sono le rette invarianti in una simmetria centrale? Lo sono solo globalmente o
anche punto per punto?
Esercizio. Determinare che cos’è l’isometria f, composizione di un traslazione e di una
simmetria centrale.
9
Soluzione. Si ricordi che una traslazione di vettore w è composizione di due opportune
simmetrie assiali con assi che sono r, s che possono essere arbitrariamente scelti fra le infinite
coppie di assi paralleli in modo che il vettore v ortogonale ad entrambi verifichi v = w/2 sia
tale che un suo rappresentante con origine su r abbia punto termine su s. Prendiamo in
particolare s passante per O. Analogamente una simmetria centrale di centro 0 è la rotazione
di un angolo piatto attorno ad 0 ottenuta come composizione di due arbitrarie simmetrie assiali
ad assi ortogonali passanti per O: prendiamo come primo asse s e come secondo asse il suo
perpendicolare per 0. Allora l’applicazione f è composizione (σt◦ σs)◦(σs◦ σr). Applicando la
proprietà associativa ed il fatto che σs 2 = id, si ha:
f = (σt◦ σs)◦ (σs◦ σr) = σt◦ (σs◦ σs)◦ σr = σt◦ (σs 2)◦ σr = σt◦ (σs 2)◦ σr = σt◦ σr
ossia f è la composizione di due simmetrie assiali ad assi r e t perpendicolari e quindi la
rotazione attorno al loro punto di intersezione Q di un angolo piatto: la simmetria centrale
attorno a Q.
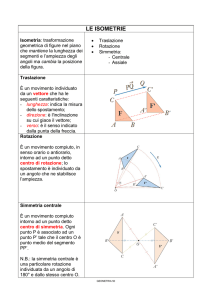
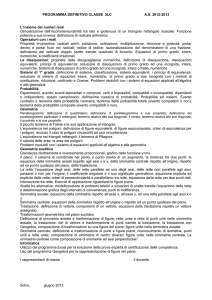
Quindi la composizione di un traslazione dio vettore w e di una simmetria centrale di centro O
è la simmetria centrale attorno al punto Q tale che il segmento orientato che ha origine in Q e
termine in O rappresenti il vettore v = w/2 (equivalentemente tale che il segmento orientato
che ha origine in O e termine in Q rappresenti il vettore -v = -w/2)
Il disegno seguente può aiutare a visualizzare la situazione con P’ = σr(P), P’’ = σs(σr(P)) =
v(P),
P’’’ = σs(P’’) = σs(σs(σr(P))) = σs(v(P)) (si noti che coincide con P’) e PIV = σt(P’’’) = σt
(P’).
Esercizio. Determinare che cos’è l’isometria g, composizione di due simmetrie centrali con
centri distinti O e O’.
Traccia. Analogamente a prima ogni simmetria centrale è composizione di due simmetrie
assiali ad assi perpendicolari nel punto di intersezione e dato che tali assi possono essere presi
arbitrariamente, purché con le proprietà indicate, si può prendere per entrambe le simmetrie
centrali un asse comune: la retta s per O e O’, in modo che la simmetria ci centro O sia (σs◦
σr) e quella di centro O’ sia (σt◦ σs). Allora analogamente a prima g = (σt◦ σs)◦ (σs◦ σr) σt◦
(σs 2)◦ σr = σt◦ σr , ma ora gli assi r e t sono paralleli e quindi g è la traslazione di vettore 2 v
10
dove b è il vettore rappresentato dal segmento orientato con origine in O e termine in O’, come
visualizzato dal disegno
Esercizio. Determinare che cos’è l’isometria h, composizione di una simmetria centrale di
centro 0 seguita da un asimmetria assiale di asse r, passante per 0. Si svolga lo stesso
esercizio facendo invece precedere la simmetria assiale alla simmetria centrale.
Glissoriflessioni.
Meno usuale è la glissoriflessione (o glissosimmetria) di asse la retta r e vettore di
traslazione v (parallelo ad r): è la composizione σr,v = σr ◦ v =
v ◦
σr
della riflessione nella
retta r con la traslazione di vettore v. E’ il parallelismo fra r e v a garantire che le applicazioni
commutano.
Le glissosimmetrie sono isometrie inverse in quanto composizioni di tre simmetrie assiali.
11
Con le stesse notazioni precedenti possiamo ottenere come composizione di due opportune
riflessioni in rette s e t tra loro parallele ed ortogonali a r, quindi
σr,v = σt ◦ σs ◦ σr = σr ◦ σt ◦ σs.
Esercizio. Determinare che cos’è l’isometria h, composizione di una simmetria centrale di
centro 0 seguita da un asimmetria assiale di asse r, non passante per 0. Si svolga lo stesso
esercizio facendo invece precedere la simmetria assiale alla simmetria centrale.
12
Classificazione delle isometrie del piano.
Enunciamo senza dimostrazione alcuni teoremi di struttura.
Teorema. Ogni isometria del piano è l’identità oppure è la composizione di al più tre
riflessioni.
Osservazione. L’insieme delle riflessioni costituisce un insieme di generatori per il gruppo
delle isometrie piane: ogni isometria piana si può ottenere anche come composizione di
riflessioni. Anzi ogni isometria si può ottenere come composizione al più tre opportune
riflessioni. Questo significa che se anche un’isometria è data (in modo complicato) come
composizione di numerosissime altre isometrie, esistono tre opportune riflessioni (non
necessariamente contenute tra le isometrie che hanno contribuito a definire l’isometria) la cui
composizione è uguale all’isometria stessa.
Teorema. Sia f un’isometria del piano diversa dall’identità.
Se
Se
Se
Se
f
f
f
f
è
è
è
è
diretta ed ha un punto fisso, allora f è una rotazione.
diretta e non ha punti fissi, allora è una traslazione.
inversa ed ha punti fissi, allora è una riflessione.
inversa e non ha punti fissi, allora è una glisso riflessione.
Appendice: il primi argomenti di teoria dei gruppi: linguaggio, primi
fatti, esempi.
Con il termine gruppo si designa un insieme non vuoto qualsiasi, G, su cui sia definita
un’operazione binaria, ossia un’applicazione G × G → G (definita sul prodotto cartesiano G × G
ed a valori in G), che ad ogni coppia di elementi (a, b) G × G associ uno ed un solo
elemento di G denotato a * b in modo tale che siano verificate le seguenti proprietà:
1. proprietà associativa: dati a, b ,c G, vale (a * b) * c = a * (b * c);
2. esistenza dell’elemento neutro: esiste in G un elemento neutro rispetto
all'operazione * cioè un elemento e tale che a * e = e * a = a per ogni a G;
3. esistenza dell'inverso: per ogni elemento a di G esiste un elemento b, detto inverso
di a , tale che a * b = b * a = e.
Un gruppo si chiama commutativo (o abeliano) se vale anche l’ulteriore
13
4. proprietà commutativa: a * b = b * a per ogni coppia a, b di elementi di G.
Dato un gruppo G, gli elementi di un suo sottoinsieme non vuoto S si dicono generatori di G
se per ogni elemento g G esistono s1, s2, …, sr S tali che g = s1 * s2 * … * sr.
La cardinalità dell'insieme G viene indicata con |G| ed è chiamata ordine del gruppo: se
questa è finita allora G è un gruppo finito, altrimenti è infinito.
Spesso si indica il gruppo con la coppia (G, *) per evidenziare l’operazione * che definisce su G
la struttura di gruppo. Non basta infatti dare un insieme per avere un gruppo: talvolta infatti
sullo stesso insieme sono definite più operazioni ed occorre precisare rispetto a quale delle
operazioni ci si riferisce.
Osservazioni.
Unicità dell’elemento neutro. In ogni gruppo non possono esserci due o più elementi neutri
distinti, ossia in G c’è un unico elemento, denotato con e, tale che a * e = e * a = a per ogni
elemento a in G.
Infatti se oltre ad e, anche f è un elemento neutro, allora vale che a * f = f * a = a per ogni
a G e quindi: f = e * f = e, dove la prima eguaglianza segue dal fatto che e è un elemento
neutro, e la seconda dal fatto che lo è f. In definitiva f = e.
Unicità dell’inverso. Allo stesso modo, ogni elemento ha un unico inverso: per ogni elemento
a di G esiste un unico elemento b, tale che a * b = b * a = e. Tale elemento, l’inverso, è
denotato con a-1.
Infatti se b, c sono entrambi inversi di a, allora valgono sia a * b = b * a = e sia a * c = c * a
= e, quindi: b = b * e = b * (a * c) = (b * a) * c = e * c = c, dove le eguaglianze seguono,
nell'ordine, dalla definizione di elemento neutro, dal fatto che c è inverso di a, dalla proprietà
associativa, dal fatto che b è inverso di a ed infine ancora dalla definizione di elemento neutro.
In definitiva b = c.
Osserviamo inoltre che e * e = e, quindi l’elemento neutro del gruppo è inverso di se stesso.
Notazioni. L’elemento a * b viene spesso chiamato prodotto di a con b e spesso il simbolo *
viene sostituito da una notazione moltiplicativa (analoga a quella standard fra i numeri anche
se solo raramente ha una qualche relazione con essa) e così, come accade per la
moltiplicazione fra numeri, il simbolo * spesso viene omesso. Allora si scrive ab (oppure ab
oppure a×b) invece che a * b. L’inverso di un elemento a è indicato con a -1 , l’elemento neutro
con 1G o più semplicemente con 1 (se il riferimento al gruppo G è chiaro dal contesto) e il
prodotto a * a * … * a (n volte) è indicata con an.
Si noti che
(ab)-1 = b-1a-1
14
ossia che l’inverso di un prodotto è il prodotto degli inversi nell’ordine scambiato.
Infatti (b-1a-1)(ab) = b-1(a-1 a)b = b-11Gb = b-1b = 1G. Il risultato si generalizza ad un numero
superiore qualsiasi di fattori, ad esempio: (abc)-1 = c-1b-1a-1.
Quando il gruppo è commutativo, talvolta si preferisce usare una notazione additiva invece
che moltiplicativa, e si indica a * b con a + b. Così l’elemento neutro è 0G, o semplicemente 0,
e a * a * … * a (n volte) è indicato con na.
Sottogruppi. Un sottoinsieme H di un gruppo G è un sottogruppo se H è un gruppo rispetto
alla stessa operazione * considerata in G.
Questa richiesta equivale a richiedere che H contenga l'elemento neutro e di G e che H sia
chiuso rispetto all'operazione * (ovvero che, se a e b sono elementi di H, allora anche a * b
appartiene a H).
Problema. Si cerchi di dimostrare che (H, *) è un sottogruppo di (G, *) se e solo se sono
verificate le proprietà appena enunciate.
E’ relativamente semplice vedere che se H è un sottogruppo di G allora le due proprietà
precedenti sono verificate. E’ più complesso verificare il viceversa.
Ogni gruppo (G, *), con elemento neutro e, ammette come sottogruppi (
e , *) e (G, *) (detti
sottogruppi banali) che sono quindi sempre il più piccolo ed il più grande dei sottogruppi
contenuti in G.
Esempi.
ℤ = …, -3, -2, -1, 0, 1, 2, 3, … con l'operazione di
addizione "+" forma un gruppo abeliano: il gruppo (ℤ, +).
a) L’insieme dei numeri interi relativi
b) Anche i numeri razionali e i numeri reali formano un gruppo commutativo con l'operazione
somma. Si ottengono quindi due altri gruppi:
c) L’insieme dei numeri interi relativi pari
(ℚ, +) (ℝ, +).
2ℤ =
2n
n
ℤ
forma un sottogruppo del
gruppo dei numeri interi con l’operazione di addizione più in generale lo sono anche gli insiemi
dei numeri interi relativi che sono multipli di un dato numero d, dℤ
= dn
n
d) I numeri naturali non formano un gruppo commutativo con l’addizione: infatti con
l’eccezione di 0, elemento neutro additivo, nessun numero naturale ha come opposto un altro
numero naturale.
e) I numeri interi relativi non formano un gruppo con l'operazione di moltiplicazione: infatti la
moltiplicazione è associativa e ha un elemento neutro 1, ma la maggior parte degli elementi
non ha inverso, ad esempio non esiste nessun numero intero relativo che moltiplicato per 2 dia
15
come risultato 1: l’inverso c’è ma è un numero razionale non intero. Gli unici due elementi
ℤ (ossia che hanno un inverso che è elemento di ℤ) sono 1 e -1 con inversi se
stessi. Si noti invece che l’insieme -1, 1
con la moltiplicazione forma un gruppo
invertibili in
(commutativo).
f) I numeri razionali, privati dello zero, formano un gruppo commutativo con la moltiplicazione.
Un numero razionale diverso da zero è rappresentato da una frazione a / b, con a e b numeri
interi relativi entrambi non nulli, il cui inverso è rappresentato da b / a. Analogamente, i
numeri reali senza lo zero formano un gruppo con la moltiplicazione. Sono quindi gruppi
(ℚ 0 , ×) e (ℝ 0 , ×). Si noti anche che (ℚ 0 , ×) è sottogruppo di (ℝ 0 , ×) ed infine
che -1, 1 , ×) è sottogruppo di entrambi.
I vettori. Consideriamo l’insieme dei vettori nel piano (o nello spazio): ossia le classi di
equivalenza dei segmenti orientati equipollenti (aventi cioè la stessa lunghezza, la stessa
direzione, lo stesso verso). Ogni vettore è individuato e rappresentato da un qualsiasi
segmento orientato della sua classe e che ogni segmento orientato individua e rappresenta un
vettore: quello costituito da tutti i segmenti orientati ad esso equipollenti. Tra i vettori si può
definire un’operazione di addizione con la “legge del parallelogramma”: dati due vettori non
paralleli v, w, li si rappresenta con due segmenti orientati con la stessa origine. Allora il punto
A con i punti B, C, termine rispettivamente di v e w, individuano un parallelogramma A, B, C,
D. La somma v + w è definita come il vettore individuato dal segmento orientato con origine in
A e termine nel quarto vertice D.
Si provi a definire la somma di due vettori paralleli. Si potrebbe dimostrare che l’insieme dei
vettori con questa operazione di addizione ha la struttura di gruppo commutativo (si provi a
dimostrare almeno in parte alcune delle proprietà richieste).
Aritmetica modulare. Consideriamo la nota relazione sulla somma dei numeri interi relativi
pari e dispari (P = pari, D = dispari): P + P = P, D + D = P, P + D = D + P = D e disponiamo i
risultati nella tabella:
16
+
P
P
P
D
D
D
D
P
Si può verificare che l’insieme P, D , con l’operazione + così definita, ha la struttura di gruppo
abeliano. Un numero è pari (rispettivamente dispari) se e solo se il resto della divisione del
numero stesso per 2 è 0 (rispettivamente 1). Indichiamo con [0] (rispettivamente [1]) la
classe dei numeri pari (rispettivamente dispari), ossia la classe dei numeri che divisi per 2
hanno resto 0 (rispettivamente 1), le due classi [0] e [1] costituiscono una partizione
dell’insieme dei numeri interi relativi e sull’insieme delle due classi [0], [1] , detto insieme
delle classi dei resti modulo 2. Si noti anche che [0] coincide con l’insieme
2ℤ = 2n
n
ℤ , che è un sottogruppo di ℤ con l’operazione di addizione. Si può definire un’addizione
sulla base della tabella precedente sostituendo P con [0] e D con [1]:
+
[0]
[0]
[0]
[1]
[1]
[1]
[1]
[0]
Così resta indotta un struttura di gruppo abeliano sull’insieme [0], [1] .
La tabella precedente si può interpretare così, ad esempio: [0] + [1] = [1] significa che la
somma di un numero che diviso per 2 dà resto 0 con un numero che diviso per 2 dà come
resto 1, è un numero che diviso per due dà come resto 1 (ed in modo analogo negli altri casi).
In definitiva abbiamo sostituito ai numeri i loro resti nella divisione per 2 ed abbiamo definito
su questi un’operazione di addizione che risulta coerente con il resto nella divisione per 2 della
somma di due numeri interi. L’unica differenza con l’addizione usuale tra numeri interi è 1 + 1
= 2 e si può interpretare così: nell’aritmetica usuale 1 + 1 = 2, ma 2 ha resto 0 nella divisione
per 2, e quindi scriviamo [1] + [1] = [0]. Abbiamo ottenuto un’aritmetica dei resti della
divisione per 2, detta anche aritmetica modulo 2.
Allo stesso modo, sostituendo ai numeri i loro resti, possiamo operare con i resti nella divisione
per qualsiasi numero d
2 ed ottenere una struttura di gruppo commutativo finito sull’insieme
[0], [1], …, [d-1] : un’aritmetica modulo d. Come prima [0] corrisponde a
dℤ = dn
n
ℤ , sottogruppo di ℤ, [1] al sottoinsieme degli interi il cui resto nella divisione per d è 1, [2]
al sottoinsieme degli interi il cui resto nella divisione per d è 1 ed in generale [h] corrisponde
sottoinsieme degli interi il cui resto nella divisione per d è h per 0
h
d-1. Il solo [0] =
dℤ è
ℤ, mentre nessuna classe [h] lo può essere non appena h ≠ 0: infatti
nessuna di tali classi contiene 0, l’elemento neutro di ℤ.
un sottogruppo di
Ad esempio per d = 3 abbiamo le classi:
[0] = …, -9, -6, -3, 0, 3, 6, 9, … , [1] = …, -8, -5, -2, 1, 4, 7, 10, … ,
[2] = …, -7, -4, -1, 2, 5, 8, 11, … ;
17
per d = 4 le classi:
[0] = …, -12, -8, -4, 0, 4, 8, 12, … , [1] = …, -11, -7, -3, 1, 5, 9, 13, … ,
[2] = …, -10, -6, -2, 2, 6, 10, 14, … , [3] = …, -19, -5, -1, 3, 7, 11, 15, …
.
E le rispettive tabelle dell’addizione:
+
[0]
[0]
[0]
[1]
[1]
[2]
[2]
+
[0]
[0]
[0]
[1]
[1]
[2]
[2]
[3]
[3]
[1]
[1]
[2]
[0]
[1]
[1]
[2]
[3]
[0]
[2]
[2]
[0]
[1]
[2]
[2]
[3]
[0]
[1]
[3]
[3]
[0]
[1]
[2]
Esercizio. Scrivere le tabelle anche per d = 5, d = 6, d = 7 … e verificare che l’addizione nelle
aritmetiche modulari precedenti si possono rappresentare su un circonferenza numerica.
Osservare infine che l’orologio analogico fornisce un supporto per le aritmetiche modulo 12 e
modulo 60.
18