Elettronica I
Corso di Laurea in Ingegneria Elettronica e Informatica
Gino Giusi
Università degli Studi di Messina
Dipartimento di Ingegneria
Contrada di Dio, 98166 S.Agata, Messina
web: www.ginogiusi.com e-mail: [email protected] tel: 090-397-7560 (7381)
Informazioni sul corso
Obiettivi: Analisi e progettazione di circuiti elettronici analogici
basati su diodi e transistors.
Prerequisiti: teoria delle reti elettriche lineari in DC e AC.
Tipologia delle lezioni: teoria ed esercitazioni supportate da
proiezione di slides e lavagna. Esercitazioni al calcolatore.
Testo di riferimento: “Microelettronica”, R.C. Jaeger, T. N.
Blalock, Mc Graw Hill.
Altro Materiale :
www.ginogiusi.com
slides
delle
lezioni
disponibili
su
Informazioni sul corso
Tipologie di esame:
• prova scritta (o 2 in itinere) + prova orale
VALUTAZIONE FINALE = (SCRITTO + ORALE)/2
• prova scritta (o 2 in itinere)
VALUTAZIONE
SCRITTO
VALUTAZIONE
FINALE
18-21
18
22-24
19
25-27
20
28-30
21
L’Elettronica
Scienza dei sistemi hardware dedicati a elaborare l’informazione contenuta in
grandezze fisiche (tensioni/correnti elettriche, campi elettromagnetici).
Esempio:: l’amplificatore audio
Esempio
Microfono: converte le onde acustiche in una tensione/corrente elettrica
Amplificatore: amplifica l’ampiezza del segnale elettrico proveniente dal Mic
Casse acustiche: convertono il segnale elettrico amplificato in onde acustiche amplificate
L’Elettronica
Scienza dei sistemi hardware dedicati a elaborare l’informazione contenuta in
grandezze fisiche (tensioni/correnti elettriche, campi elettromagnetici).
Esempio:: sistemi di telecomunicazioni
Esempio
L’Elettronica
Scienza dei sistemi hardware dedicati a elaborare l’informazione contenuta in
grandezze fisiche (tensioni/correnti elettriche, campi elettromagnetici).
Esempio:: computer
Esempio
Elettronica vs. Elettrotecnica
L’elettronica si diversifica dalle Scienze elettriche ed elettro-meccaniche
che si occupano della generazione, distribuzione, immagazinamento e
conversione dell’energia elettrica da e verso altre forme di energia usando
conduttori, motori, generatori, batterie, trasformatori, resistori e altri
componenti passivi.
batterie
motori
condensatori
trasformatori
induttori
resistori
L’Elettronica
L’elettronica ha a che fare con circuiti elettrici (detti circuiti elettronici)
costituiti da componenti attivi come i tubi a vuoto, i diodi, i transistors e i
circuiti integrati, insieme ai componenti elettici passivi e tecnologie di
interconnessione.
tubi a vuoto
transistors
diodi
circuiti integrati
I componenti attivi (e quindi i circuiti elettronici) consentono di elaborare
l’informazione immagazzinata nei segnali elettrici.
L’Elettronica
L’elettronica è parte fondamentale della nostra società
Branche dell’Elettronica
analogica digitale
bassa frequenza alta frequenza
bassa potenza alta potenza
discreta integrata
L’Elettronica Analogica
In elettronica analogica l’informazione può assumere una numero infinito di
valori.
Esempio: l’amplificatore audio
L’Elettronica Digitale
In elettronica digitale l’informazione può assumere solo un numero finito di
valori.
segnale elettrico digitale
L’elaborazione digitale dell’informazione ha preso il sopravvento su quella
analogica:
• maggiore capacità di immagazzinare informazione
• maggiore capacità di elaborare l’informazione
• maggiore robustezza e sicurezza dei sistemi
L’Elettronica delle alte frequenze
Basse frequenze
Suoni udibili
Alte Frequenze
Radio FM
Televisione
Comunicazioni navali e governative.
Telefoni cellulari e wireless
TV via satellite
Dispositivi Wireless
20 Hz - 20 KHz
88 - 108
54 - 216
216 - 450
1710 - 2690
3.7 - 4.2
5.0 - 5.5
MHz
MHz
MHz
MHz
GHz
GHz
L’Elettronica di potenza
alimentatore
carica batterie
amlificatore audio di potenza
UPS
L’inizio dell’era dell’elettronica moderna
Il transistor
•
componente fondamentale di qualunque
apparecchiatura elettronica
•
dispositivo elettronico a semiconduttore a
3 terminali
•
inventato nel 1947 da Brattain, Shockley,
Bardeen nei laboratori Bell (premio Nobel
1956)
Il transistor: principio di funzionamento
Transistor = Transfer Resistor (resistenza di trasferimento)
la tensione (corrente) al terminale di
controllo determina la conducibilità
(corrente) tra i terminali A e B.
funzioni principali:
amplificazione dei segnali elettrici
(elettronica analogica)
interruttore controllato (elettronica
digitale)
Il primo transistor
transistore bipolare al
germanio a punta di contatto
(1947):
• due punte metalliche a
contatto con una base di
germanio
• le punte sono i terminali A e
B, la base è il terminale di
controllo
Il primo transistor
I progenitori dei transistors: i tubi a vuoto
Progenitori dei principali moderni dispositivi a semiconduttore:
diodi e transistors
Diodo (1904, Flemming) il filamento incandescente
riscalda il catodo che emette elettroni, i quali sono
attirati dal potenziale positivo dell’anodo.
Triodo (1907, Le de Forest). Primo componente
amplificatore costruito dall’uomo. La griglia viene
posta ad un potenziale negativo ed agisce da
terminale di controllo: il suo potenziale determina
il numero di elettroni che arrivano all’anodo.
I progenitori dei transistors: i tubi a vuoto
1907, Le De Forest. Primo triodo a vuoto
Vantaggi dei transistors rispetto ai tubi a vuoto
•
•
•
•
•
•
piccole dimensioni e peso ridotto dispositivi elettronici miniaturizzati
processo di costruzione automatizzato ed efficiente
tensioni di alimentazione ridotte dispositivi portatili
nessun periodo di “riscaldamento” dopo l’accensione
più bassa dissipazione di potenza migliore efficienza energetica
lunga durata di vita
Transistors “discreti”
Lo scaling dei transistor: i circuiti integrati
Transistors “integrati”
1958: Kilby e Noice sviluppato
il primo circuito integrato
Le innovazioni produttive consentono la
riduzione della dimensione caratteristica
Lo scaling dei transistor: la legge di Moore
Legge di Moore: « Le prestazioni dei processori, e il numero di
transistor ad esso relativo, raddoppiano ogni 18 mesi. »
Lo scaling dei transistor: circuiti di memoria
moduli di memoria SO-DIMM
Lo scaling dei transistor: i circuiti integrati
livello di integrazione
componenti/chip
Small Scale Integration (SSI)
<10
Medium Scale Integration (MSI)
10-100
Large Scale Integration (LSI)
100-104
Very Large Scale Integration (VLSI)
104-109
Ultra Large Scale Integration (ULSI)
1010
Lo scaling dei transistor: elettronica consumer
Obiettivi del processo di integrazione:
• dispositivi più piccoli e portatili
• minore consumo energetico
• maggiori prestazioni
Tappe fondamentali dell’elettronica
1874 Braun inventa il raddrizzatore a stato
solido.
1895 Marconi
effettua
le
prime
trasmissioni via radio
1904 Fleming inventa il diodo a vuoto
1906 DeForest inventa il triodo a vuoto
1907-27 Primi circuiti radio sviluppati con
diodi e triodi.
1925 primo prototipo di TV
1925 Lilienfeld brevetta il dispositivo ad
effetto di campo
1947 Bardeen e Brattain ai Laboratori Bell
inventano il transistore bipolare.
1952 Texas
Instruments
inizia
la
produzione commerciale di transistori
bipolari.
1956 Bardeen, Brattain, e Shockley
ricevono il premio Nobel.
1958 Kilby e Noyce sviluppano i circuiti
integrati
1961 Primo
circuito
integrato
commercializzato
dalla
Fairchild
Semiconductor
1968 Primo
amplificatore
operazionale
integrato
1970 Cella DRAM a un transistore inventata da
Dennard alla IBM.
1971 Presentazione del processore Intel 4004.
1978 Prima memoria commerciale da 1-kilobit.
1974 Presentazione del processore 8080.
1984 Presentazione del chip di memoria da 1
Megabit.
1995 Chip di memoria da 1 gigabit presentato
alla IEEE International Solid-State
CircuitsConference (IEEE ISSCC)
2000 Alferov, Kilby, e Kromer vincono il
premio Nobel
Il mercato dell’elettronica
l’elettronica rappresenta il 10% (4 trilioni di dollari) del prodotto
interno lordo mondiale (PIL).
Contenuti del corso
analogica digitale
bassa frequenza alta frequenza
bassa potenza alta potenza
discreta integrata
Contenuti del corso
Introduzione e concetti fondamentali
richiami di teoria dei circuiti
la simulazione circuitale con SPICE
elementi di Elettronica dello stato solido
Parte I: Dispositivi Elettronici
il diodo a giunzione
transistori ad effetto di campo (FETs)
il transistore bipolare (BJT)
Parte II: Circuiti amplificatori a transistors
amplificatori a BJT e FETs
Contenuti del corso
Introduzione e concetti fondamentali
richiami di teoria dei circuiti
la simulazione circuitale con SPICE
elementi di Elettronica dello stato solido
Parte I: Dispositivi Elettronici
il diodo a giunzione
transistori ad effetto di campo (FETs)
il transistore bipolare (BJT)
Parte II: Circuiti amplificatori a transistors
amplificatori a BJT e FETs
Circuiti elettronici
Definizione: insieme di componenti elettronici connessi tra di
loro da conduttori “ideali”.
Problema da risolvere: determinare tutte le tensioni e le
correnti della rete (soluzione della rete).
Input del problema: generatori di tensione e di corrente
indipendenti.
Metodo di risoluzione: leggi di Kirchoff.
Convenzioni
Potenziale di un punto della rete: si intende la differenza di
potenziale (d.d.p.) tra il punto considerato e un punto (nodo) di
riferimento assunto con potenziale nullo.
M: nodo di riferimento
VM=0V (definizione)
VA=VA-VM=VAM
Il simbolo VCC indica che
è presente una batteria tra
il nodo VCC e il nodo di
riferimento (M)
A
M
Convenzioni
Potenziale di un punto della rete: si intende la differenza di
potenziale (d.d.p.) tra il punto considerato e un punto (nodo) di
riferimento assunto con potenziale nullo.
M: nodo di riferimento
VM=0V (definizione)
VA=VA-VM=VAM
Il simbolo VCC indica che
è presente una batteria tra
il nodo VCC e il nodo di
riferimento (M)
A
M
Convenzioni
VA non ha significato perchè non è specificato il riferimento
VAM continua ad avere senso
VCC non ha significato: l’alimentazione non c’è!
A
M
Convenzioni
Segnale elettrico: componente continua+componente
variabile (valor medio nullo)
Esempio: potenziale del punto A
v A V A va
VA: componente continua
va: componente variabile
vA:
segnale totale
v A 5 sin(2000t ) 4 3 cos(1000t ) V
V A 4V
va 5 sin(2000t ) 3 cos(1000t ) V
Relazioni costitutive
La relazione costitutiva f di un componente elettronico è la legge (o insieme di
leggi) matematica che lega le correnti che scorrono ai suoi terminali con le
tensioni applicate ai terminali stessi. Ad esempio per un bipolo (2 terminali)
La relazione costitutiva f è anche chiamata modello di ampio segnale
Componenti lineari e non lineari
• un componente elettronico è lineare se f è lineare
• la funzione f è lineare se e solo se vale il principio di sovrapposizione degli
effetti, ovvero se e solo se f(ax1+bx2)=af(x1)+bf(x2)
Esempi di componenti elettronici lineari
iR((t))
R
+
vR(t)
_
iR(t) = vR(t)/R
f(x)=x/R
dvC (t )
iC (t ) C
dt
Esempio di componente elettronico
non lineare : il diodo
di L (t )
v L (t ) L
dt
iD (v D ) e v D 1
Caratteristica corrente-tensione (IV)
La caratteristica corrente-tensione (IV) di un componente elettronico è la
relazione costitutiva in DC (detta anche modello in DC)
Esempio
in DC
relazione costitutiva
v (t )
dv (t )
i (t )
C
R
dt
in DC
caratteristica IV
/ t 0
V
I
R
Sperimentalmente la caratteristica IV di un bipolo si ottiene applicando una
tensione (corrente) continua V (I) e misurando, dopo che si sono esauriti i
transitori (t→∞), la corrente (tensione) I (V).
Circuiti lineari e non lineari
Un circuito è lineare se e solo se è costituito da componenti lineari
i
iC
iL
circuito elettronico lineare
circuito elettronico non lineare
la maggior parte dei sistemi elettronici sono costituiti da componenti non lineari (es:
gli amplificatori sono fatti con transistors)
nella maggior parte dei casi si richiede un funzionamento lineare (es: il concetto di
amplificazione è lineare)
è possibile far lavorare sistemi non lineari in regime di funzionamento lineare
(linearizzazione)
Linearizzazione dei circuiti non lineari
La caratteristica I(V) può essere
linearizzata intorno ad un punto di
lavoro (I0, V0) se v(t) ha piccole
variazioni intorno a V0 (piccolo
segnale).
I (V ) I (V )
0
I
V
V V I
0
V0
eq GeqV
Geq 1 / Req
I
V
V0
I eq I (0) I (V 0 ) GeqV 0
modello di piccolo segnale
Req, Ieq : parametri del modello (dip. dal punto di
lavoro )
il modello va completato con gli effetti non inclusi
nella risposta in DC
Analisi nel dominio del tempo
gli input del problema sono matematicamente rappresentati da
espressioni nel dominio del tempo.
Es:
v(t)=V0+VM sin (2ft+f0)
La soluzione della rete sono espressioni nel dominio del tempo.
circuito
elettronico
Analisi nel dominio del tempo
Caso particolare: analisi in DC (Direct Current): gli input del
problema sono le componenti continue delle sorgenti di
tensione/corrente indipendenti (se assente vuol dire che vale 0!).
i
iC
I
IC
iL
IL
analisi in DC
La soluzione della rete è detta punto di lavoro (OP) o punto di
funzionamento a riposo ed è un insieme di numeri, ovvero le
componenti DC di tutte le correnti e tensioni della rete.
Analisi nel dominio del tempo
Caratteristica di trasferimento di una rete: y=f(x)
relazione f che lega una variabile y (corrente o tensione) della
rete ad una sorgente indipendente x della rete stessa in DC.
• reti lineari o non lineari
• le altre sorgenti indipendenti restano fisse al variare di x
Es:
DC
V AB f1 V A , V1 , V2
I 2 f 2 V A , V1 , V2
Analisi nel dominio della frequenza (AC)
i concetti matematici di serie e trasformata di Fourier consentono
di rappresentare matematicamente gli input del problema come
somme di sinusoidi
x (t ) AX ( f ) sin 2ft X ( f )
f
AX ( f ): spettro di ampiezza di x
X ( f ): spettro di fase di x
X ( f ) AX ( f )e j X ( f )
spettro di x
AX, X sono funzioni reali di variabile reale (f)
X è funzione complessa di variabile reale (f)
spettro di un
segnale periodico
Analisi nel dominio della frequenza (AC)
Nel caso di reti lineari o nel caso di regime di funzionamento lineare è
possibile calcolare la soluzione della rete usando il principio di
sovrapposizione, ovvero calcolando la risposta della rete frequenza per
frequenza. Tale metodologia è detta analisi in AC. Gli output del problema
saranno quindi esprimibili come
y (t ) AY ( f ) sin 2ft Y ( f )
Y ( f ) AY ( f )e jY ( f )
f
Funzione di risposta armonica:
H( f )
X ( f)
H ( f)
Y ( f ) AY ( f ) j Y ( f ) X ( f )
e
H ( f ) e j H ( f )
X ( f ) AX ( f )
AX, AY, X, Y , |H|, H sono funzioni reali di variabile reale (f)
X, Y, H sono funzioni complesse di variabile reale (f)
Y ( f)
Analisi nel dominio della frequenza (AC)
Funzione di risposta armonica:
X ( f)
H ( f)
y(t)
Y ( f)
t
H ( f ) H ( f ) e j H ( f )
x(t)
Significato. Si consideri per semplicità una rete lineare con un
ingresso ed una uscita. Se in ingresso alla rete applico un segnale
sinusoidale a frequenza f, con ampiezza AX e fase X, in uscita
ottengo, dopo che si sono esauriti tutti i transitori, un segnale
sinusoidale alla stessa frequenza f, ampiezza AY=|H(f)| AX e fase
Y=H(f)+X.
Analisi dei circuiti: leggi di Kirchoff
Prima legge (KCL): la somma delle correnti entranti
in un nodo è pari alla somma delle correnti uscenti.
Seconda legge (KVL): la somma algebrica delle
d.d.p. lungo un percorso chiuso è pari a zero.
• descrivono la topologia della rete e sono valide in tutti i regimi di
funzionamento (DC, AC, ...)
• si applicano ai circuiti elettronici a parametri concentrati, cioè
circuiti che non irradiano, dove l'energia si può considerare
concentrata nei componenti del circuito
• sono
una
approssimazione
delle
leggi
dell'elettromagnetismo di Maxwell, che non implicano nessuna ipotesi
sulla natura dei componenti del circuito (es. lineari o non-lineari)
v4 v3 v2 v1 0
v1 v2 v3 v4 0
v4 v1 v2 v3
Analisi dei circuiti: leggi di Kirchoff
Reti monomaglia
• si scelgono versi arbitrari per la corrente di maglia I e per le d.d.p. ai capi di ogni bipolo
• si scrivono le relazioni costitutive di tutti i componenti
• si scrive la KVL alla maglia (la KCL non è necessaria perchè non ci sono nodi)
• si risolve il sistema
VR1 IR1
VR 2 IR2
V V V
R1
R2
3 eq. in 3 incognite
(I, VR1, VR2)
+
VR1
R1
-
I
V1
R2
VR2
+
VR1 IR1
VR 2 IR2
V V V
R1
R2
I V / R1 R2
VR1 VR1 / R1 R2
V VR / R R
2
1
2
R2
leggi del partitore
di tensione
Es: V=1V, R1=R2=500WI=1mA, VR1=VR2=0.5V
I>0: la corrente circola nel verso scelto
I V / R1 R2
VR1 VR1 / R1 R2
V VR / R R
2
1
2
R2
leggi del partitore
di tensione
I=-1mA, VR1=0.5V, VR2=-0.5V
I<0: la corrente circola nel verso opposto a quello scelto
(NON E’ UN ERRORE)
Analisi dei circuiti: leggi di Kirchoff
Reti con più maglie (n nodi)
• si scelgono versi arbitrari per le correnti su ogni ramo e per le d.d.p. ai capi di ogni bipolo
• si scrivono le relazioni costitutive di tutti i componenti
• si scrivono le KVL alle maglie indipendenti
• si scrivono le KCL ai nodi indipendenti (n-1)
• si risolve il sistema
VR1 I1R1
V I R
R2 2 2
VR 3 I 3 R3
V1 VR1 VR 2 V2
V1 VR1 VR 3
I1 I 2 I 3
relazioni costitutive
leggi di Kirchoff
(topologia rete)
•2 termini noti: V1, V2
•6 eq. in 6 incognite (I1, I2, I3, VR1, VR2,VR3)
Analisi dei circuiti: divisore di corrente
VR1 I1R1
VR 2 I 2 R2
VAB VR1
V V
R2
AB
I I1 I 2
I1 I
R2
R1 R2
I2 I
R1
R1 R2
leggi del divisore
di corrente
Sovrapposizione degli effetti
La risposta di una rete lineare alla sollecitazione di più generatori indipendenti può essere ottenuta
considerando ciascun generatore separatamente attivo e sommando le rispettive riposte della rete.
V1=0
2 sorgenti ind. (V1, I2)
A
V1
I1
I2
A
+
R3
VAB
I3
R1
I2=0
B
-
'
''
V AB VAB
V AB
I1 I1' I1''
I 3 I 3' I 3''
=
+
+
R3
V1
V’’AB
I’’1
I’’3
R1
B
-
Circuiti equivalenti di Thévenin e Norton
Teorema di Thevenin (Norton): qualunque rete elettrica lineare, vista tra due
punti A e B della rete, è rappresentabile come un generatore reale di tensione
(corrente).
Thévenin
Rth: resistenza “equivalente” tra A e B
vth: tensione “a vuoto” tra A e B
in: corrente di “corto-circuito” tra A e B
Norton
Nota: l’equivalenza vale per ciò che concerne il resto della rete (RL)
Analisi dei circuiti: equivalente di Thévenin
Calcolo generatore equivalente
di Thevenin: si calcola la
tensione a vuoto tra A e B
3 equazioni:
2 maglie indipendenti, 1 nodo
vS R1i1 v AB
v AB RS iS
i i i
1
S
1
termini noti: vS
incognite: i1, iS, vAB
3 equazioni in 3 incognite
1RS
50 1103
vth v AB
vs
v 0.718vs
3
3 s
1RS R1
50 110 10
A
iS
B
Analisi dei circuiti: equivalente di Thévenin
Calcolo resistenza equivalente di
Thevenin: si calcola la resistenza “vista”
tra A e B
1. si passivano le sorgenti indipendenti
2.
3.
4.
si applica un generatore di tensione vX
(corrente iX) di prova tra i punti dove si
vuole calcolare Rth
si calcola la corrente iX (tensione vX) erogata
(sviluppata) dal genetore di prova.
Rth = vX/iX
A
iS
B
Analisi dei circuiti: equivalente di Thévenin
Calcolo resistenza equivalente di Thevenin:
3 maglie ind.
2 nodi ind.
R1i1 VAB
V R i
S S
AB
VAB v X
i i i
1
2
1
i2 i X iS
termini noti: vX
incognite: i1, vAB , iS , i2 , iX
5 equazioni in 5 incognite
R1
20 kW
Rth RS
1 kW
1 kW 392 W 282 W
1
50 1
Analisi dei circuiti: equivalente di Norton
Calcolo generatore equivalente di Norton:
• si cortocircuitano i terminali di uscita A e B
• si calcola in col verso di erogazione del circuito equivalente
(1 )
in i1 i1 i1 (1 )
vs
R1
50 1
-3
1
v
2
.
55
10
W
vs
3 s
20 10
Calcolo resistenza equivalente di Norton: stesso procedimento di Rth
Circuiti equivalenti di Thévenin e Norton
Thévenin
Norton
• la semplificazione di una porzione di circuito che contiene generatori controllati è
possibile SOLO SE le grandezze di controllo fanno parte della porzione di circuito
semplificata
• se la porzione di rete da ridurre non contiene generatori indipendenti, vth=0, in=0 e la
rete equivale alla sola Rth
Analisi dei circuiti: teorema di Millaman
• velocizza la risoluzione di reti lineari costituite da più rami in parallelo tra due nodi A e B
• nei rami devono solo apparire generatori indipendenti
• si calcolano le correnti di corto circuito entranti nel nodo A
• si calcolano le conduttanze di ogni ramo (si passiva la relativa sorgente ind.)
• la d.d.p. VAB si calcola come il rapporto tra la somma delle correnti di cortocircuito di ogni ramo e
la somma delle conduttanze di ogni ramo
VAB
V1 V2
V1 V2
0
R R2
R1 R2
1
1
1
1
1
1
1
R1 R2 R3 R1 R2 R3
le variabili incognite possono essere calcolate a
partire da VAB (Es.: I3=VAB/R3)
A
V1
I2
R1
B
R3
VAB
V1
V1
I2 0
I2
R1
R1
1 1 1
1
1
R1 R3 R1 R3
Analisi dei circuiti
Errori tipici
• equazioni dimensionalmente errate
• equazioni alle maglie (nodi) con segni errati
• la d.d.p. ai capi dei generatori di corrente non è 0!
• potenziali indicati senza nodo di riferimento
• grandezze presenti nelle equazioni non indicate nello schema elettrico
• equazioni con simboli e numeri senza dimensioni
L’approccio più robusto (ed elegante) alla risoluzione delle reti elettriche è quello di
effettuare tutti i passaggi in forma simbolica e sostituire solo alla fine i valori
numerici.
Questo approccio permette:
• di ottenere equazioni che possono essere riutilizzate
• di effettuare ragionamenti sul circuito
• di scoprire più facilmente errori (in particolare dimensionali)
Contenuti del corso
Introduzione e concetti fondamentali
richiami di teoria dei circuiti
la simulazione circuitale con SPICE
elementi di Elettronica dello stato solido
Parte I: Dispositivi Elettronici
il diodo a giunzione
transistori ad effetto di campo (FETs)
il transistore bipolare (BJT)
Parte II: Circuiti amplificatori a transistors
amplificatori a BJT e FETs
La simulazione circuitale
strumento per prevedere la risposta nel dominio del tempo e/o della
frequenza di un circuito elettronico soggetto ad uno stimolo di ingresso
attraverso l’uso del calcolatore.
La simulazione circuitale
input della simulazione:
• descrizione del circuito (componenti e connessioni)
• descrizione analitica delle relazioni costitutive dei compontenti (modelli)
• descrizione tipo di analisi (in continua, in frequenza, ecc...)
l’insieme di queste componenti definisce un set di equazioni da risolvere ed il
problema diventa essenzialmente di calcolo numerico
il simulatore non introduce conoscenza
l’accuratezza dei risultati dipende
• dalla bontà della modellizzazione dei componenti che costituiscono il
circuito
• dai metodi numerici implementati per la risoluzione del problema.
Perchè effettuare una simulazione?
al crescere delle dimensioni del circuito diventa molto difficile e spesso
impossibile risolvere il circuito analiticamente (carta e penna).
permette di prevedere la risposta del cirtuito senza montarlo in laboratorio
con conseguenze riduzione di costi e tempo di progettazione.
permette di riprodurre situazioni difficilmente realizzabili in laboratorio
(effetti parassiti, temperatura diversa da quella ambiente, ecc...)
permette di effettuare analisi parametriche e statistiche per prevedere la
robustezza del comportamento di un circuito.
Queste problematiche sono state enfatizzate con l’avvento dei circuiti
integrati che, insieme con la diffusione di sempre più potenti sistemi di
calcolo, hanno portato alla nascita della simulazione circuitale.
Storia di SPICE
SPICE (Simulation Program with Integrated Circuit Emphasis) è il simulatore
circuitale ad oggi più diffuso e deriva da un programma sviluppato da un gruppo
di studenti per un corso di simulazione circuitale all’Università di Berkeley
(California) tra il 1969 e il 1970
il nome originale del programma era CANCER (Computer Analysis of Nonlinear
Circuits Excluding Radiation) e poteva effettuare analisi in continua, transitorio,
frequenza sui circuiti contenenti resistori, condensatori, induttori, diodi e BJT
viste le notevoli potenzialità dimostrate, CANCER diventa nel 1971 la prima
versione di SPICE (SPICE1) che includeva anche JFET e MOSFET. Grazie
anche al fatto che SPICE venne distribuito gratuitamente da Berkeley, divenne
subito uno standard
nel corso degli anni sono state rilasciate diverse versioni del programma (nel’75
SPICE2, nell’ ‘83 SPICE3) caratterizzate dall’utilizzo di metodi numerici sempre
più efficienti, da un linguaggio più potente, da modelli più sofisticati dei
dispositivi e librerie più complete.
Storia di SPICE
Oggi tutti i principali fornitori di software CAD offrono una versione arricchita o
supportata di SPICE:
•
•
•
•
HSPICE (Meta-Software, adesso acquistato dalla Synopsys)
PSPICE (Microsim, adesso acquistato da Cadence)
IGSPICE
Microwave SPICE
PSPICE è disponibile in numerose versioni per i diversi sistemi operativi (DOS,
Windows, Unix, etc.).
Faremo riferimento alla versione ORCAD PSPICE Lite (limitata nel numero di
nodi e componenti)
Struttura del simulatore SPICE
Text Editor
.sch
Schematic
Editor
.cir
.out
Text Editor
.dat
Graphic
Interface
Parser
&
Solver
.lib
Le informazioni di input del simulatore, contenute all’interno
di un file *.cir, devono essere
descrizione topologica del circuito (schematico o netlist)
tipo di simulazione da effettuare (DC, AC, transitorio, ecc..)
comandi di output
Descrizione del circuito: lo schematico
Descrizione del circuito: la netlist
Titolo del circuito
.
*commento
.
<caricamento librerie e definizione
modelli>
.
*commento
.
<istanziamento componenti>
la prima riga del file .cir è
riservata al titolo e non viene
interpretata
il carattere “*”
un’intera linea
SPICE è case insensitive
l’ordine
dei
irrilevante
<comandi di simulazione>
per continuare a capo una riga
basta iniziare la seguente riga
con “+”
<comandi output>
.
.END
il carattere “;” commenta la
restante parte della linea
commenta
comandi
è
Classi di analisi di simulazione
Analisi standard:
Punto di lavoro (.OP)
Funzione di trasferimento (.TF)
Analisi in continua (.DC)
Analisi in transitorio (.TRAN)
Analisi in frequenza (.AC )
Analisi di Fourier (.FOUR)
Analisi di rumore (.NOISE)
Analisi multi-run:
Analisi parametriche (.STEP)
Analisi in temperatura (.TEMP)
Analisi statistiche:
Monte Carlo (.MC)
Sensibilità e caso peggiore (.WCASE)
Elementi circuitali implementati
Componenti Analogici
•
•
•
•
•
•
•
•
Resistenze (ideali e a semiconduttore)
Condensatori (ideali e a semiconduttore)
Induttori (singoli e mutui)
Interuttori controllati in tensione o corrente
Generatori di tensione/corrente indipendenti/dipendenti
Linee di trasmissione
Diodi
Transistori (BJT, JFET, MOSFET)
Componenti Digitali (porte logiche, MUX, A/D, D/A,
Memorie,...)
Componenti di libreria (circuti integrati)
Istanziamento componenti
ogni componente definisce un ramo; un
nodo è il punto di incontro di almeno 2 rami
ogni elemento della rete è connesso tra 2 o
più nodi numerati (es. R1 tra 1 e 2)
il nodo 0 (necessario) è assunto come
riferimento per il potenziale degli altri nodi
(massa) ed è posto a 0V
i nomi dei componenti possono essere lunghi fino ad 8 caratteri, ma devono
iniziare con una lettera riconosciuta da SPICE che identifica il tipo di componente
il circuito si descrive attraverso la netlist elencando, senza alcun ordine, i componenti
del circuito. Es:
R1 1 2 100
indica un resistore (si capisce dalla R) connesso tra i nodi 1 e 2 di valore 100 ohm
IS 0 1 DC 0.1
indica un generatore di corrente (si capisce dalla I) in continua (DC) di valore 0.1A
Componenti passivi ideali
Sintassi:
R<name> <n+> <n-> <value>
C<Nome> <n+> <n-> <value> [IC=<V0>]
L<Nome> <n+> <n-> <value> [IC=<I0>]
Il campo IC permette di specificare il valore iniziale di tensione
(condensatori) o corrente (induttori) per le analisi in transitorio.
Esempi:
Rload 2 10 10k
C1 13 0 1uF IC=10V
L3 3 4 1mH IC=0.7mA
Parametri
Sintassi:
.PARAM <name> <var> | <expression>
assegna un valore ad un parametro direttamente o attraverso una
espressione
Esempio:
.PARAM R1val=1M
.PARAM R2val= {10*R1val }
R2 2 0 {R2val}
.
Modelli di componenti
la maggior parte dei componenti più semplici richiede un numero semplice e
limitato di equazioni matematiche e di parametri (es. in un resistore il modello
matematico è I=V/R e l’unico parametro necessario è R)
componenti più complessi (diodi e transistors) sono caratterizzati da equazioni
più complicate e richiedono molti parametri fisico-tecnologici da specificare
i modelli racchiudono un set di equazioni e di parametri fisico-tecnologici per
uno specifico componente
i parametri dei modelli hanno dei valori di default, vanno specificati solo quelli
che si vogliono cambiare
esistono una moltitudine di modelli di componenti commerciali racchiusi in
librerie di modelli
Sintassi:
.MODEL <MNAME> <MTYPE> [PARAM1=PVAL1] [PARAM2=PVAL2] .....
Generatori indipendenti di tensione e corrente
Generatore di corrente indipendente:
I<name> <(+) node> <(-) node>
+ [ [DC] <value> ]
+ [ AC <magnitude value> [phase value] ]
+ [STIMULUS=<stimulus name>]
+ [transient specification]
Esempio: generatore di corrente
costante
Ipippo
3
0
DC
2.3mA
La corrente fluisce dal nodo + al nodo –
Generatore di tensione indipendente:
V<name> <(+) node> <(-) node>
+ [ [DC] <value> ]
+ [ AC <magnitude value> [phase value] ]
+ [STIMULUS=<stimulus name>]
+ [transient specification]
Esempio: generatore di tensione
per analisi in AC
(componente
DC
nulla,
componente variabile ampiezze
1mV e fase nulla)
V3 2 3 AC .001
Stimoli Transitori: PULSE
Si usa lo stimolo PULSE per generare forme d’onda pulsate periodiche:
PULSE (<V1> <V2> <Td> <Tr> <Tf> <PW> <PER>)
Td
Tr
PW
Tf
PER
V2
V1
Esempio:
ISW 10 5 PULSE(1A 5A 1sec .1sec .4sec .5sec 2sec)
Stimoli Transitori: SIN
SIN (<Voffset> <Vamp> <FREQ> <Td> <DF> <FASE>)
V=Voffset+Vamp*sin{2π*[freq*(t–Td)+FASE/360])*exp[-(t-Td)/DF]
Esempio:
I3 26 77 DC .002 SIN(.002 .002 1.5MEG)
Stimoli Transitori: PWL
Per generare una forma d’onda arbitraria si usa lo stimolo PWL
PWL (t0,V0) (t1,V1) (t2,V2) … (tn,Vn)
ad ogni coppia corrisponde un punto
i punti vengono interpolati tramite rette
l’ultimo valore di tensione viene mantenuto fino alla fine della
simulazione
V1
V2
V0
Vn
t0
t1
t2
tn
Generatori lineari dipendenti
Generatore di tensione controllato in tensione (v = e v):
E<name> <n+> <n-> <nc+> <nc-> <gain>
Esempio:
V(3,0)=10*V(5,6)
E1 3 0 5 6 10
Generatore di corrente controllato in tensione (i = g v):
G<name> <n+> <n-> <nc+> <nc-> <gain>
Esempio:
I(3,0)=10*V(5,6)
G1 3 0 5 6 10
Generatori lineari dipendenti
Generatore di tensione controllato in corrente (v= h i):
H<name> <n+> <n-> <control device> <gain>
Esempio:
V(3,0)=10*I(5,6)
H1 3 0 V1 10
V1 5 6 DC 0
Generatore di corrente controllato in corrente (i = f i):
F<name> <n+> <n-> <control device> <gain>
Esempio:
I(3,0)=10*I(5,6)
F1 3 0 V1 10
V1 5 6 DC 0
Comandi di output
Sintassi: .PRINT <analysis type> [<var1> <var2> …..]
permette di salvare il valore di correnti e tensioni del
circuito, sotto forma di tabelle, in un file *.out
Ogni variabile di uscita diventa una colonna della tabella
Esempio:
.PRINT DC V(3) V(2,3) V(R1)
Sintassi: .PROBE [<var1> <var2> …..]
output grafico (file *.dat)
senza argomenti salva tutte le variabili
Esempio: .PROBE V(3) V(2,3) V(R1) I(VIN) I(R2)
Comandi di simulazione: punto di lavoro
Sintassi:
.OP
valuta il punto di riposo relativo allo stato iniziale del circuito
non vengono prodotte forme d’onda
sul file .OUT di uscita vengono riportati tutti i valori di
tensioni e correnti e potenza dissipata nel punto di riposo
Comandi di simulazione: analisi in continua
Sintassi:
.DC [<sweep type>] <sweep variable>
+<start val> <end val > <step val> [nested sweep]
Sweep Lineare
.DC LIN I2 5mA 12mA 0.1mA
.DC VIN -.25 .25 .05
.DC VCE 0V 10V .5V IB 0mA 1mA 50uA
.DC PARAM RLval 50 1000 10
.DC RES RMOD(R) 0.9 1.1 .001
Sweep Logaritmico
.DC DEC PARAM RLval 1e3 1e5 3
List Sweep
.DC PARAM RLval LIST 50 100 200
.DC TEMP LIST 0 20 27 50 80 100
Comandi simulazione: analisi in transitorio
Sintassi: .TRAN <T step> <T stop> [<T start> [<T max>]]
la simulazione parte sempre da t = 0
<T stop> specifica la durata della simulazione
<T step> specifica lo step per l’output testuale
<T start> (opzionale) fa si che vengano salvati soltanto i valori da t = Tstart
in poi, riducendo le dimensioni dei file di uscita
<T max> e’ il massimo valore dello step temporale usato per la
simulazione, e quindi per la risoluzione delle equazioni differenziali
il comando .IC specifica la condizione iniziale del circuito:
.IC
<V(<n_nodo>) = val
.IC <I(ramo) >= val
Comandi di simulazione: analisi in AC
Sintassi:
.AC <sweep type> <points value> <start frequency>
+<end frequency >
Esempi
.AC LIN 101 100Hz 200kHz
.AC OCT 10 1kHz 16kHz
.AC DEC 20 1MEG 100MEG
Comandi di simulazione: analisi di Fourier
Sintassi:
.FOUR <fundamental freq.> <var1> <var2> ….
in presenza di uno stimolo transitorio in ingresso, permette di calcolare le
prime 9 armoniche, a partire dalla fondamentale, delle variabili di output
produce l’output (modulo e fase delle armoniche) senza specificare altre
istruzioni (.PRINT, .PLOT, .PROBE)
è possibile produrre anche un output grafico con .PROBE
Esempio
.FOUR 125kHz V(1), V(4)
Comandi di simulazione : funzione di trasferimento
Sintassi:
.TF <output var> <input source name>
calcola il rapporto in DC tra l’output e l’input specificati
non viene prodotto output grafico
sul file .OUT di uscita viene scritto il valore del rapporto
out/in, nonchè le resistenze di ingresso e di uscita
Comandi di simulazione: analisi parametrica
.STEP <sweep type> <sweep variable name> <start value>
+ <end value> <increment value>
• varia a passi (LIN, LOG, LIST), durante l’analisi, il valore di una
sorgente, di un componente, o di una temperatura (anche con .TEMP)
• effettua n simulazioni indipendenti (a differenza di .DC che crea un unico
output grafico)
Esempi:
.STEP VCE 0V 10V .5V
.STEP LIN I2 5mA -2mA 0.1mA
.STEP TEMP LIST 0 20 27 50 80 100
.STEP PARAM CenterFreq 9.5kHz 10.5kHz 50Hz
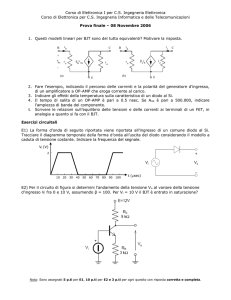
Esempio: analisi del punto di lavoro
Determinare:
punto di lavoro
V(2)/VIN nel OP
V(2) in funzione 0≤ VIN≤1
Primo Esempio:
*Un partitore resistivo
VIN 1 0 DC 6
*Resistenza tra 1 e 2:
R1 1 2 100
*Resistenza tra 2 e massa:
R2 2 0 100
*Analisi DC del circuito
.OP
.TF V(2) VIN
.DC VIN 0 1 0.1
.PROBE
.END
Esempio: analisi parametrica in DC
Determinare
OP in funzione 0≤ VIN≤1
Secondo Esempio:
.PARAM Rval=100
VIN 1 0 DC 6
R1 1 2 {Rval}
R2 2 0 {Rval}
.OP
.STEP VIN 0 1 0.1
.END
Esempio: analisi in transitorio
Determinare la risposta
transitorio
al
gradino
ampiezza 5V (trise=0)
*Carica RC
VIN 1 0 PULSE 0 5
R1 1 VOUT 6k
C1 VOUT 0 10e-9
.TRAN 5n 400u
.PROBE
.END
in
di
Esempio: analisi in frequenza
Determinare la risposta in
frequenza nella banda 1Khz100Mhz
Risposta in frequenza di un
**circuito RC
V1 1 0 AC 1
R1 1 2 100
C1 2 0 1n
.AC DEC 100 1e3 1e8
.PROBE
.END
Risoluzione numerica in DC-Circuiti lineari
Si applica il metodo dei potenziali ai nodi:
per ogni nodo, eccetto lo 0, si scrive la
legge delle correnti di Kirchoff ponendo
a sinistra i termini incogniti e a destra i
termini noti
IS
I12
I12 I 20 I 23
0
G1V12 G2V2 G3V23
I 23 I 30 0
si sostituisce ad ogni corrente incognita
Iij la relazione I-V del ramo connesso tra i
nodi i e j
IS
G1V12
0
G3V23 G4V3 0
Gi =1/Ri
Vij = Vi - Vj
Risoluzione numerica in DC-Circuiti lineari
IS
G1V12
G1V12 G2V2 G3V23
0
G3V23 G4V3 0
può essere scritta in forma matriciale: Y∙V=I
G1
G
1
0
G1
G1 G2 G3
G3
matrice delle ammettenze Y
V1 I S
V 0
2
G3 G4 V3 0
0
G3
matrice delle
incognite V
matrice dei
termini noti I
Risoluzione numerica in DC-Circuiti lineari
G1
G
1
0
G1
G1 G2 G3
G3
matrice delle ammettenze Y
V1 I S
V 0
2
G3 G4 V3 0
0
G3
matrice delle
incognite V
matrice dei
termini noti I
la risoluzione del circuito diventa un problema di inversione di matrice: V = Y-1 ∙ I
noti i potenziali Vk è possibile determinare tutte le correnti incognite attraverso le
relazione di ramo (nell’esempio le correnti nei resistori sono Iij=GijVij)
Risoluzione numerica in DC-Circuiti non lineari
Sono circuiti che includono componenti non lineari come diodi e
transistori.
esempio:
2
qV
kT
I 2 (V2 ) I SAT e 1
La relazione I2(V2) è
altamente non lineare
-GV2 -I2(V2) = -GVS
G=1/R
• non può essere scritta in forma matriciale!
• si risolve in modo iterativo
Risoluzione numerica in DC-Circuiti non lineari
La relazione I2(V2) deve essere linearizzata intorno ad un punto di riposo iniziale (I20,
V20) sviluppando al primo ordine I2(V2) in un intorno di (I20, V20):
I 2 (V2 ) I 2 (V20 )
Geq 1 / Req
I 2
V2
I 2
V2
V
0
V
2
2 I eq GeqV2
V20
I eq I 2 (0) I 2 (V20 ) GeqV20
V20
Il diodo può essere sostituito col circuito equivalente lineare:
Risoluzione numerica in DC-Circuiti non lineari
Metodo di Newton-Raphson
Setta punto di lavoro
iniziale: (I20, V20), n=0
di fondamentale importanza è la
scelta (algoritmo) del punto di
lavoro iniziale
può essere impostato attreverso il
comando NODESET
Esempio:
Incrementa indice
iterazione n=n+1
Calcola Ieq, Req
Risolve rete e nuovo punto di
lavoro (I2n, V2n)
.NODESET V(2)=3.4 I(R1)=3u
NO
|V2n-V2n-1|<
SI
FINE
Risoluzione numerica in AC
La risoluzione in AC prevede una serie di step
risoluzione in DC per la determinazione del punto di lavoro (funzione solo delle
componenti continue delle sorgenti). I componenti non lineari (diodi, transistors) sono
sostituiti col modello equivalente di piccolo segnale calcolato al punto di lavoro ottenuto.
per ogni valore di frequenza f compreso nell’intervallo di simulazione prefissato, i
condensatori sono sostituiti con ammettenze di valore j2pfC e gli induttori con
ammettenze di valore –j/2pfL. La matrice delle ammettenze ricavate avrà elementi
complessi
per ogni valore di frequenza compreso nell’intervallo di simulazione prefissato Y∙V=I
viene risolta ottenendo tutte le tensioni e correnti che risultano essere dei numeri
complessi (rappresentabili in modulo e fase)
Risoluzione numerica in transitorio
Il vettore dei termini noti I è funzione del tempo
Il punto di lavoro viene calcolato al tempo iniziale t=0. In questo modo le condizioni
iniziali per gli elementi reattivi sono determinate (tensioni ai capi dei condensatori e
correnti attraverso gli induttori, le correnti ai capi dei condensatori e le tensioni ai capi
degli induttori sono nulli al tempo 0).
La simulazione avanza secondo time steps DT (impostabile dall’utente) costanti fino al
tempo totale di simulazione T (impostabile dall’utente):
0, DT, 2 DT, ...., T
La soluzione al tempo i DT viene calcolata usando la soluzione al tempo (i-1) DT come
condizione iniziale (soluzione quasi statica)
Contenuti del corso
Introduzione e concetti fondamentali
richiami di teoria dei circuiti
la simulazione circuitale con SPICE
elementi di Elettronica dello stato solido
Parte I: Dispositivi Elettronici
il diodo a giunzione
transistori ad effetto di campo (FETs)
il transistore bipolare (BJT)
Parte II: Circuiti amplificatori a transistors
amplificatori a BJT e FETs
Classificazione dei materiali a stato solido
Classificazione in base alla disposizione atomica
Materiali dell’elettronica allo stato solido
lo sviluppo dei materiali e delle tecnologie per la realizzazione degli ICs ha reso
possibile la moderna rivoluzione della tecnologia dell’informazione
particolare interesse rivestono i semiconduttori (cristallini) poichè la resistività può
essere modulata mediante l’aggiunta di impurità alla struttura cristallina (drogaggio).
i semiconduttori elementari sono formati da atomi di un solo tipo, generalmente della
IV colonna (Si, Ge).
i semiconduttori composti sono formati dalla combinazione di elementi della III e della
V colonna o della II e della VI (GaAs, InP)
Materiali semiconduttori
• il primo semiconduttore ad essere usato
è stato il germanio
• il silicio ha rapidamente sostituito il
germanio grazie a
maggiore ampiezza di banda
proibita che ne permise l’impiego a
temperature più elevate
formazione di un ossido stabile,
caratteristica molto importante nel
processo di fabbricazione degli ICs.
• GaAs e InP impiegati in optoelettronica:
LED, laser, fotorivelatori
• materiali innovativi: SiC, SiGe
Struttura cristallina del Silicio
Il Silicio appartine alla IV colonna: 4 elettroni
nell’orbita più esterna che si legano con i 4
atomi più vicini (legame covalente)
a T=0K tutti i legami sono completi. Ogni
atomo di silicio contribuisce con un elettrone
per ognuna delle coppie di legame.
Elettroni e lacune
T>0K
l ’ aumento di T aggiunge
energia al sistema e rompe i
legami generando
• elettroni liberi di muoversi
sotto l’influenza di un campo
elettrico esterno
• vacanze o lacune
Elettroni e lacune
• i legami si rompono in modo
statistico
• una lacuna si muove quando la
vacanza è riempita da un elettrone
di un legame rotto nelle vicinanze.
• nei semiconduttori la conduzione
avviene a causa degli elettroni e
delle lacune.
• n, p: concentrazioni di elettroni e
lacune [cm-3]
• per il silicio intrinseco, n =p= ni
Modello a bande di energia
EC e EV sono I livelli di
energia ai bordi della banda
di valenza e di conduzione.
L’elettrone che fa parte di
un legame covalente si
trova in uno stato di bassa
energia nella banda di
valenza. La figura si
riferisce a 0 K.
L ’ energia termica
rompe
i
legami
covalenti generando
elettroni in banda di
conduzione e lacune
in banda di valenza.
Concentrazione intrinseca dei portatori
• il numero di elettroni e lacune determina la conducibilità di un materiale
• nel Si a T=300K n=p=ni≈1010 cm-3 (molto bassa, praticamente isolanti)
• all’aumentare di T si rompono più legami e n,p aumentano (maggiore
conducibilità a differenza dei metalli)
• a parità di T, materiali con più basso EG hanno maggiore conducibilità
• nei metalli EG≈0 e il trasporto di carica è dovuto solo agli elettroni
Concentrazione intrinseca dei portatori
La densità dei portatori di carica in un
semiconduttore è funzione della temperatura e
delle proprietà del materiale:
E
p n ni BT 3 exp G
kT
1/2
cm-3
EG = ampiezza di banda proibita del semiconduttore eV
k = Costante di Boltzmann, (8.62 x 10-5 eV/K, 1.38 x10-23 J/K);
T = temperatura assoluta, K
B = parametro caratteristico del materiale
EG è la minima energia necessaria per liberare un
elettrone rompendo un legame covalente.
Equilibrio termodinamico
Le variabili termodinamiche (temperatura, pressione, volume)
sono costanti (nel tempo).
In condizioni di equilibrio termodinamico gli elettroni (lacune)
si muovono in banda di conduzione (valenza) in modo caotico a
causa dell’energia fornitagli dall’ambiente (agitazione termica).
Corrente di deriva
Fp= + qE
Fn = - qE
L
+
le particelle cariche e libere si muovono
in modo ordinato (derivano) sotto
l’influenza del campo elettrico applicato
generando una corrente di deriva
j=Qv
E=V/L
-
·
V
q
j
Q
v
= 1.6 ∙10-19C
= densità di corrente di deriva [A/cm2]
= densità di carica [C/cm3]
= velocità delle cariche [cm/s]
Mobilità
Per bassi valori di campo elettrico E (<103 V/cm nel silicio)
vn = - nE
vp = pE
vn e vp = velocità di elettroni e lacune (cm/s)
n e p = mobilità di elettroni e lacune (cm2/Vs)
• n > p
• per campi elevati (>107 V/cm nel
silicio), la velocità dei portatori
satura saturazione della corrente.
• diminuisce all’aumentare di T
(urti col reticolo, come nei metalli)
•la mobilità limita la risposta in
frequenza. Nel GaAs è maggiore
che nel silicio applicazioni high-f
Conducibilità e Resistività
La corrente di deriva (drift) jdrift=Qv è dovuta sia agli elettroni che alle lacune
jndrift = Qnvn = (-qn)(- nE) = qn nE
jpdrift = Qpvp = (+qp)(pE) = qp pE
jTdrift = jndrift
+ jp
drift
= q(n n + p p)E = E
= q(n n + p p)
= 1/
[(cm)-1 ]
legge di Ohm
microscopica
conducibilità elettrica
resistività elettrica
[cm]
j E
I 1V
V RI
S L
L
R
S
legge di Ohm
macroscopica
Semiconduttori drogati
Il drogaggio è il processo con cui si aggiungono piccole quantità
di impurità in un semiconduttore per controllarne la resistività.
Tipi di drogaggio usati per il silicio:
donatore (V colonna): P, As, Sb
accettore (III colonna):
B
valori tipici: 1014cm-3÷1021cm-3
Impurità di tipo donatore per il silicio
• atomi di P (o altri elementi della V
colonna) rimpiazzano atomi di Si nella
struttura cristallina.
• poichè il P ha 5 elettroni sull’orbita
esterna, ci sarà un elettrone ‘extra’
• il materiale ha ancora carica neutra, ma
basta poca energia (45 meV per il P)
per rendere disponibile l’elettrone per il
processo di conduzione
• ogni atomo di P dona un elettrone per
la conduzione
• ND (drogaggio donatore) >> ni n ≈ND
(è possibile controllare )
Impurità di tipo accettore per il silicio
• atomi di B (III colonna) rimpiazzano
atomi di Si nella struttura cristallina.
• poichè il B ha 3 elettroni sull’orbita
esterna, ci sarà un legame incompleto
(lacuna)
• il materiale ha ancora carica neutra, ma
basta poca energia (44 meV per il B)
affinchè un legame vicino si ‘sposti’
• ogni atomo di B accetta un elettrone
liberando una lacuna in banda di
valenza per la conduzione
• NA (drogaggio accettore) >> pi p ≈NA
(è possibile controllare )
Impurità di tipo accettore per il silicio
moto della lacune in banda di valenza
Concentrazione dei portatori di carica
Legge di azione di massa: pn = ni2
(semiconduttori drogati e non drogati)
Drogaggio (ND) con impurità donatori
n ≈ND
p ≈ ni2/ ND
n>>p (il silicio è detto di tipo n)
gli elettroni sono i portatori maggioritari, le lacune i minoritari
Drogaggio (NA) con impurità accettori
p ≈NA
n ≈ ni2/ NA
p>>n (il silicio è detto di tipo p)
le lacune sono i portatori maggioritari, gli elettroni i minoritari
Mobilità e resistività nei semiconduttori drogati
•n>p
• diminuisce a
causa dei maggiori
urti
Diffusione
Le particelle materiali (non necessariamente cariche) hanno una naturale
tendenza a muoversi (a causa dell’agitazione termica) verso le zone con
concentrazione più basse.
tale processo è detto diffusione e comporta il trasporto di massa da una zona ad
alta concentrazione C [cm-3] di particelle ad una a più bassa concentrazione.
il flusso di particelle f [s-1cm-2] è regolato dalla legge di Fick: f=-DC/x
D : diffusività [cm2/s]
Corrente di diffusione
nei dispositivi elettronici è abbastanza frequente avere gradienti di concentrazione
del drogante e/o drogaggio di tipo diverso.
nel caso dei semiconduttori, oltre a trasporto di massa avviene un trasporto di
carica, e quindi la nascita di una corrente (di diffusione) Jdiff = qf [A/cm2]
p
p
J p ,diff ( q ) D p qD p
x
x
n
n
J n ,diff ( q) Dn qDn
x
x
Dp / Dn : diffusività di elettroni e lacune
Corrente totale in un semiconduttore
La corrente totale è la somma
delle correnti di deriva e di
diffusione di elettroni e lacune
n
j q n nE qDn
x
p
T
j p q p pE qD p
x
T
n
Semiconduttori:
• il trasporto è dovuto ad elettroni e lacune
• il drogaggio permette di modulare la conducibilità
• la corrente è dovuta a componenti di drift e diffusione
Metalli:
• il trasporto è dovuto interamente agli elettroni
• ni è talmente alto (EG basso) che il drogaggio risulta
ininfluente non è possibile modularne il drogaggio
•solo le correnti di drift di elettroni sono significative
Contenuti del corso
Introduzione e concetti fondamentali
Parte I: Dispositivi Elettronici
il diodo a giunzione
struttura e funzionamento
analisi dei circuiti con diodi
esempi applicativi
transistori ad effetto di campo (FETs)
il transistore bipolare (BJT)
Parte II: Circuiti amplificatori a transistors
amplificatori a BJT e FETs
Il diodo a giunzione pn
• 2 terminali (bipolo): anodo (A), catodo (K)
• favorisce il passaggio di corrente nella direzione A K
• impedisce il passaggio di corrente nella direzione K A
simbolo del diodo
NA
ND
Applicazioni:
• circuiti di alimentazione
Metal contacts
• elaborazione dei segnali
• conversione energia elettrica luminosa (LED, celle solari)
• la struttura di transistori BJT e FET contiene giunzioni pn
Regione di carica spaziale (SCR)
-
j
• i gradienti di concentrazione danno origine a
correnti di diffusione (di maggioritari)
+
• lo spostamento di carica mobile lascia carica
fissa non bilanciata si crea una regione di
carica spaziale (SCR) e un campo elettrico E
• il campo E genera una corrente di drift (di
minoritari) che bilancia la corrente di diffusione
equilibrio con SCR di dimensione finita wd0
A
K
• il campo E crea un d.d.p. ai capi della
giunzione detto potenziale di giunzione φj:
N AND
φ j = VT ln 2
ni
wd 0 = ( xn + x p ) =
kT
, VT =
q
2ε s 1
1
φ j
+
q N A ND
• il campo E ostacola il passaggio dei
maggioritari attraverso la SRC mentre favorisce
il passaggio dei minoritari
Regione di carica spaziale (SCR)
Esempio: giunzione pn a temperatura ambiente con NA = 1017cm-3, ND =1020cm-3
temperatura ambiente (T=300K)
ni (300K)≈1010 cm-3
n2i≈1020 cm-6
kT 1.38⋅10−23 J/K ⋅ 300K
VT =
=
= 25.9mV
-19
q
1.6⋅10 C
N AND
φ j = VT ln
2
n
i
(
)(
)
1017 cm -3 10 20 cm -3
= (0.0259V) ln
= 1.01V
20
-6
10 cm
(
)
εS= εS,r ε0=11.8∙(8.85∙10-12 F/m)
−12 F/m
2ε s 1
2
⋅
11
.
8
⋅
8
.
85
⋅
10
1
1
1
φ =
w = q
+
+
⋅1 .01V = 115 nm
N
d0
N j
−
19
23
3
26
3
1.6 ⋅10
C
m
10 m
10
D
A
La giunzione pn in polarizzazione inversa
+VD -
• polarizzazione inversa: VD<0
ID
• i maggioritari si allontanano dalla
giunzione determinando un aumento della
SCR e del campo elettrico (E)
VD<0
• i minoritari hanno il campo E a favore
-
-
+
-
+
-
+
+
E
ID<0
VD<0
• la giunzione è attraversata da una
piccola corrente inversa sostenuta dai
minoritari (la corrente di drift prevale su
quella di diffusione)
• la corrente inversa è praticamente
indipendente da VD (costante)
La giunzione pn in polarizzazione diretta
• polarizzazione diretta: VD>0
• i maggioritari si dirigono verso la giunzione
determinando una riduzione della SCR e del
campo elettrico (E)
• i minoritari vicino alla SCR risentono ancora
del campo E a favore
+
-
+
-
+
-
+
-
E
ID>0
VD>0
• i maggioritari che superano la SCR diventano
minoritari dall’altro lato della SCR. Parte di essi
tornano indietro favoriti da E e parte si
ricombinano con i maggioritari
•la giunzione è attraversata da una corrente
diretta sostenuta dai maggioritari (la corrente di
diffusione prevale su quella di drift)
• il numero di maggioritari (e quindi la ID) che
attraversano la SCR è fortemente dip. da E e
quindi da VD.
Caratteristica I-V del diodo
modello di Shockley
VD
0.1
corrente iD (A)
ID
VD
0.08
0.06
0.04
VD
nV
I D = I S e T − 1
0.02
0
-1
IS = corrente di saturazione inversa
n
= coefficiente di emissione
(10-18
÷10-9 A)
1≤n≤2
n≈1 tipico
in forte polarizzazione inversa (VD<<0)
VD
nV
T
I D = I S e −1 ≈ I S (0 −1) = −I S
-0.5
0
tensione vD (V)
0.5
1
Caratteristica I-V del diodo: dip. da T
VD
nV
I D = I S e T − 1
• pol. inversa
ID≈-IS
all’aumentare di T
• VT=kT/q
il termine entro parentesi
diminuisce all’aumentare di T
• IS∝ni2
aumenta
all’aumentare di T
fortemente
la corrente inversa aumenta
• pol. diretta: la dipendenza di IS domina e la corrente diretta
aumenta all’aumentare di T
Caratteristica I-V del diodo: dip. da T
corrente ID (V)
0.2
0.15
0.1
0.05
VD
nV
T
I D = I S e − 1
I S = 1pA n = 1
T=300K
T=325K
T=350K
0
-0.05
-0.2
-0.1
0
tensione VD (V)
0.1
0.2
• in pol. diretta la dip. da T è molto più forte a causa della maggiore
corrente
• coefficiente di temperatura (pol. diretta) del diodo a 300K
dVD / dT I ≈ - 2 mV/°C
D
Caratteristica I-V reale (1): resistenza serie
Problema: calcolare ID con VD=10V (IS=1fA, T=300K)
Soluzione: ID=4.8x10152A !!!!
• con una simile corrente il diodo si fonderebbe a causa dell’effetto Joule
• nella pratica si osserva una corrente molto più bassa
corrente iD (A)
5 x 10
4
3
2
152
VD
nV
I D = I S e T − 1
1
0
9
9.2
9.4
9.6
tensione v D (V)
9.8
10
Caratteristica I-V reale (1): resistenza serie
• le regioni esterne alla SRC sono
elettricamente neutre e si comportano come
resistenze (obbediscono alla legge di Ohm)
Rp
Rn
Esempio: S=(2 µm)2, NA = 1017cm-3,
ND =1020cm-3 , Lp=1µm, Ln=0.5µm
Lp
1
10 -6 m
R =
≈
=
≈ 471Ω
p qµ p p S
q µ p ( N A ) N A S 1.6 ⋅10 −19 C ⋅ 331.5 ⋅10 - 4 m 2 V −1s −1 ⋅ 10 23 m −3 ⋅ 4 ⋅10 −12 m 2
1
Lp
Ln
1
Ln
0.5 ⋅10 -6 m
R =
≈
=
≈ 1Ω
n qµ n n S
qµ n ( N D ) N D S 1.6 ⋅10 −19 C ⋅ 6 7.1 ⋅10 - 4 m 2 V −1s −1 ⋅10 26 m − 3 ⋅ 4 ⋅ 10 −12 m 2
1
RS = R p + Rn ≈ 4 72 Ω
Caratteristica I-V reale (1): resistenza serie
• l’effetto della RS è particolarmente rilevante in forte
pol. diretta (VA>>0)
V A = VD + RS I D ≈ RS I D ⇒ I D ≈
VA
RS
Es: VA=10V, IS=1nA, RS=100Ω, T=300K
ID≈10/100=100mA
corrente iD (A)
0.1
• in pol. diretta ID è limitata
dalla RS e non cresce in
modo esponenziale
0.08
0.06
0.04
Rdiodo
S=0 ideale
Rdiodo
S≠0 reale
0.02
0
0
2
4
6
tensione vA (V)
8
• in pol. inversa la caduta su
RS è trascurabile e VD≈VA
10
Caratteristica I-V reale (2): breakdown
• l’aumento della tensione inversa può portate il
diodo nella regione di rottura, con un rapido
incremento
della
corrente
del
diodo
(breakdown). La tensione inversa a cui avviene
la rottura è detta tensione di breakdown (BV)
2V < BV < 2000 V
• il processo
distruttivo
di breakdown
è
tipicamente
• diodi progettati per operare nella regione di
rottura (con alte correnti inverse) sono chiamati
diodi Zener . La tensione di breakdown è
chiamata tensione di Zener (VZ) e viene
controllata agendo sui drogaggi.
• nei diodi Zener la pendenza della caratteristica
nella regione di rottura è molto elevata:
applicazioni come regolatore di tensione
A
K
simbolo del diodo Zener
Effetti capacitivi: capacità di giunzione
• variazioni della tensione applicata in pol. inversa
(VR=-VD) portano a significativi cambiamenti nella
larghezza della SCR e nella carica
effetto
capacitivo
Cj =
εsA
wd
=
C j0
1+
VR
C j0 =
εsA
wd 0
φj
Es: VR=10V, NA = 1017cm-3, ND =1020cm-3 A=(100µm)2
φj≈1V, wd0 ≈ 100 nm, Cj0 ≈ 10 pF, Cj ≈ 3pF
• l’effetto capacitivo è tipicamente negativo: limita la f di
funzionamento (tempo di recupero diretto)
• la dipendenza Cj(VR) viene usata (massimizzata) in diodi
opportunamente ottimizzati (grande Cj0) detti Varactor o
Varicap.
• applicazioni tipiche dei Varicap sono i circuiti di sintonia
e i filtri a RF
simbolo del diodo a capacità
variabile (Varactor)
Effetti capacitivi: capacità di diffusione
• in pol. diretta un’ulteriore carica (dovuta alla diffusione
dei maggioritari) è immagazzinata al confine tra i bordi
della SCR e le regioni neutre
Q D = I Dτ T
+
-
+
-
+
-
+
-
τT è detto tempo di transito (10-15÷10-6s) e dipende dalle
dimensione e dal tipo di diodo
• la capacità associata (di diffusione) è quindi
proporzionale alla corrente e diventa abbastanza elevata
per alte correnti (pol. diretta)
Cd =
dQ D (I D + I S )τ T
=
dv D
nVT
>0
Es: τT = 10ns, calcolare la Cd per ID= 10µA,
0.8mA e 50mA Cj=4pF, 320 pF, 20 nF.
• l’effetto capacitivo è tipicamente negativo: limita la f di funzionamento (tempo di recupero
inverso)
diodi switching
• basse capacità Cj e Cd per funzionamento in commutazione (alta-f)
• bassa potenza (dovuta alla bassa A)
Diodo Schottky
• una delle regioni di semiconduttore del diodo a
giunzione pn viene sostituita da un metallo:
tipicamente la regione p
• il contatto metallo-seminconduttore n ha le
caratteristiche del diodo ed è detto rettificante
• per evitare la creazione di un contatto rettificante
al catodo si crea una regione molto drogata n+.
Tale contatto è detto ohmico. Questa tecnica è
usata in genere nei dispositivi elettronici.
• i diodi Schottky entrano in
conduzione a tensioni minori
rispetto a diodi a giunzione pn
• effetti
capacitivi
ridotti
applicazioni veloci (alta frequenza)
a bassa potenza
Layout del diodo a giunzione
• su un substrato debolmente drogato vengono realizzate, in modo
selettivo, regioni con drogaggio differente
• le zone di semiconduttore sono collegate all’esterno con contatti di
metallo (tipicamente Al)
• le zone di contatto sono separate tra loro con regioni di ossido
(tipicamente SiO2)
• per evitare la creazione di contatti rettificanti alle giunzioni metallosemiconduttore n, si creano delle zone drogate n+ (contatto ohmico)
• i contatti metallo-semiconduttore p sono generalmente di tipo ohmico
Fogli tecnici (datasheets)
Fogli tecnici (datasheets)
Modello SPICE del diodo a giunzione pn
Sintassi:
D<name> <N+> <N-> <MNAME> [AREA]
. MODEL <MNAME> D [model parameters]
<MNAME> : nome del modello
[AREA]:
fattore di scala per alcuni parametri
Esempio:
D1 2 10 DIODE1
.MODEL DIODE1 D IS=1e-10
Diodo: modello in continua
RS: resistenza delle regioni neutre
VD
nV
T
I S e − 1 + VD GMIN
− I S + VD GMIN
ID =
− IBV
−( BVV +VD )
− I e T − 1 + BV
S
VT
VD ≥ −5nVT
− 5nVT > VD > − BV
VD = − BV
VD < − BV
GMIN è una conduttanza che
SPICE mette in parallelo ad
ogni giunzione (anche quelle dei
modelli dei transistori) per
aiutare la convergenza
Diodo: modello in continua
Sintassi:
D<name> <N+> <N-> <MNAME> [AREA]
. MODEL <MNAME> D [model params]
Parametro
Simbolo
Significato
IS
N
RS
IS
n
RS
Corrente di saturazione
Coefficiente di emissione
Resistenza delle regioni neutre
BV
BV
Tensione di rottura
IBV
IBV
Corrente alla tensione di rottura
Diodo: modello per ampi segnali
CD=Cj+Cd
Cj: capacità di giunzione
Cd: capacità di diffusione
C j = C j ( 0) / 1 − VD / φ j
m
ID + IS
Cd = τ D
nVT
Parametro
Simbolo
Significato
TT
τD
Tempo di transito
CJ0
Cj(0)
Capacità di giunzione a polarizzazione nulla
M
m
Coefficiente del profilo di drogaggio della
giunzione
I parametri IS, CJ0, RS, IBV sono proporzionali all’area del dispositivo e
sono scalabili attraverso il parametro AREA (default=1)
Esempi
Problema: plottare la curva I(V) di un diodo con IS=1pA nel range -0.5V÷0.5V
caratteristica IV di un diodo
VIN 1 0 DC 0
D1 1 0 Dmodel
.MODEL Dmodel D IS=1e-12
.DC LIN VIN -0.5 0.5 0.1mV
.PROBE
.END
Problema: plottare la curva I(V) di un diodo con IS=1pA nel
range -0.5V÷0.5V alle temperature di 300K, 325K, 350K.
caratteristica IV di un diodo al variare di T
VIN 1 0 DC 0
D1 1 0 Dmodel
.MODEL Dmodel D IS=1e-12
.DC LIN VIN -0.5 0.5 0.1mV TEMP LIST 300 325 350
.PROBE
.END
Contenuti del corso
Introduzione e concetti fondamentali
Parte I: Dispositivi Elettronici
il diodo a giunzione
struttura e funzionamento
analisi dei circuiti con diodi
esempi applicativi
transistori ad effetto di campo (FETs)
il transistore bipolare (BJT)
Parte II: Circuiti amplificatori a transistors
amplificatori a BJT e FETs
Analisi dei circuiti a diodi
V e R rappresentano in generale
l’equivalente di Thévenin di un circuito
più complesso.
punto di lavoro del diodo Q = (ID, VD)
V = I D R + VD
V = VR + VD
IR = ID
I R = f R (V R ) = V R / R
VVD
T
I D = f D (V D ) = I S e − 1
• le prime due sono le leggi di Kirckoff e sono
imposte dalla topologia della rete
• le seconde due sono le relazioni IV di R e D
VVD
T
I D = I S e − 1
Metodi di risoluzione:
• analitico (numerico)
• grafico
• con modelli approssimati del diodo
Risoluzione grafica
V − VD
R
VVD
T
I D = I S e − 1
ID =
Problema: Individuare il punto Q
Dati noti: V = 10 V, R = 10kΩ.
VD = 0 → I D = (10V 10kΩ ) = 1 mA
VD = 5V → I D = (5V 10kΩ ) = 0.5 mA
Punto Q = (0.95 mA, 0.6 V)
Analisi con modelli approssimati
Nel caso di circuiti con più diodi i metodi precedenti diventano troppo laboriosi.
In tali casi è possibile avere una stima del risultato utilizzando modelli
approssimati per il diodo.
corrente iD (A)
0.1
0.08
0.06
0.04
RS=0
diodo ideale
Rdiodo
S≠0 reale
0.02
0
0
Von
2
4
6
tensione v A (V)
8
10
•la caratteristica reale di un diodo approssima un andamento “lineare a tratti”
•nel modello approssimato è possibile definire una tensione di accensione (o di soglia) Von
•la corrente è approssimativamente nulla per VA<<Von e cresce linearmente per VA>>Von
•nell’intorno di Von (≈0.5÷0.8V) il modello perde di accuratezza e non ha senso parlare di soglia
Analisi con modelli approssimati
in forte pol. diretta (VA>>0)
V A = VD + I D RS ≈ I D RS
VD
VVD
V
I D = I S e T − 1 ≈ I S e T
V A ≈ I S RS e
VD
VT
V
⇒ V D ≈ VT ln A
RS I S
• in pol. diretta VD non cambia
apprezzabilmente al variare di VA
1
0.8
tensione VD (V)
• dipende da RSIS
0.6
0.4
-15
IS=10 A
-13
IS=10 A
0.2
-11
IS=10 A
RS=100Ω
0
0
20
• una buona stima di Von si ottiene
per VA>>1V (es. VA=10V)
IS=10-9A
40
60
tensione VA (V)
80
100
Von
VA
≈ VT ln
RS I S
V A >> 1V
Modelli lineari a tratti
ID
Von ≠ 0
RS ≠ 0
1/RS
Von
Von ≠ 0
RS = 0
VD
Von = 0
RS = 0
Modello lineare a tratti con Von=0, RS=0
modello del
diodo ideale
VD =0 per ID≥0 pol. diretta (ON)
ID =0 per VD ≤ 0 pol. inversa (OFF)
nel punto (VD=0, ID=0) il diodo è
contemporaneamente
• OFF
• ON con corrente nulla
Metodologia di analisi:
1. ipotesi (Hp) sullo stato del diodo
2. risoluzione della rete
3. verifica della ipotesi 1
•
se Hp=D-ON bisogna verificare SE ID≥0
•
se Hp=D-OFF bisogna verificare SE VD≤0
Modello con Von=0, RS=0 (esempio)
1. dato che il generatore tende a forzare
una corrente positiva nel diodo,
supponiamo che il diodo sia ON.
1. dato che il generatore tende a forzare
una corrente inversa nel diodo,
supponiamo che il diodo sia OFF.
2. risoluzione della rete
2. risoluzione della rete
VD = −10 V
ID =
(10 − 0) V
= 1 mA
10 kΩ
3. I D = 1 mA ≥ 0 ⇒ Hp OK
3. VD = −10 V ≤ 0 ⇒ Hp OK
Punto Q = (0, -10 V)
Modello lineare a tratti con Von≠0, RS=0
modello a
caduta costante
Esempio
VD = Von per ID≥0 pol. diretta (ON)
ID = 0 per VD ≤ Von pol.inversa (OFF)
Metodologia di analisi:
1. ipotesi (Hp) sullo stato del diodo
2. risoluzione della rete
3. verifica della ipotesi 1
•
se Hp=D-ON bisogna verificare SE ID≥0
•
Se Hp=D-OFF bisogna verificare SE VD≤Von
(10 − 0.6) V
=
10 kΩ
= 0.940 mA ≥ 0 ⇒ Hp OK
ID =
Modello lineare a tratti con Von≠0, RS≠0
ID
Esempio
1/RS
Von
VD = Von+RSID
ID = 0
VD
per ID≥0
pol. diretta (ON)
per VD ≤ Von pol.inversa (OFF)
Metodologia di analisi:
1. ipotesi (Hp) sullo stato del diodo
2. risoluzione della rete
3. verifica della ipotesi 1
•
se Hp=D-ON bisogna verificare SE ID≥0
•
Se Hp=D-OFF bisogna verificare SE VD≤Von
(10 − 0.6) V
=
10 .1kΩ
= 0.93 mA ≥ 0 ⇒ Hp OK
ID =
Analisi di circuiti a più diodi
Problema: determinare Q1 e Q2 utilizzando il modello del
diodo ideale.
• 4 possibili stati
• il generatore di tensione da 15V tende a polarizzare
direttamente D1 e D2, mentre quello da -10V tende a
polarizzare direttamente D2 e inversamente D1.
• Hp = D1-ON, D2-ON
• risoluzione della rete:
(15 − 0) V
= 1.5 mA
10 kΩ
0 − (− 10 V )
ID2 =
= 2 mA ≥ 0
5kΩ
I1 = I D1 + I D 2 ⇒ I D1 = (1.5 − 2) mA = −0.500 mA < 0
I1 =
• Hp NON verificate (contemporaneamente)
• la verifica della Hp su D2 non implica che è
corretta singolarmente.
Analisi di circuiti a più diodi
Il secondo tentativo può partire dai risultati del primo:
Hp D1-OFF, D2-ON
25V
=1.67 mA ≥ 0
I D2 = I1 =
15×103Ω
V =15V −1.67 ⋅10− 3A ×104Ω =
D1
= (15 −16.7)V = −1.67 V ≤ 0
Hp OK
D1 : (0 mA, -1.67 V):OFF
D2 : (1.67 mA, 0 V) :ON
Analisi di diodi polarizzati nella regione di rottura
Nella regione di breakdown un
diodo
Zener
può
essere
modellizzato con un generatore
di tensione, VZ, e con una
resistenza in serie, RZ
L’ipotesi di funzionamento in zona di
rottura risulta verificata se IZ ≥ 0
Analisi di diodi polarizzati nella regione di rottura
analisi col modello approssimato
Hp: D in breakdown
risoluzione grafica
Q: (-2.9 mA, -5.2 V)
IZ =
(20 − 5)V
= 2.94 mA ≥ 0 ⇒ Hp OK
5100Ω
Contenuti del corso
Introduzione e concetti fondamentali
Parte I: Dispositivi Elettronici
il diodo a giunzione
struttura e funzionamento
analisi dei circuiti con diodi
esempi applicativi
transistori ad effetto di campo (FETs)
il transistore bipolare (BJT)
Parte II: Circuiti amplificatori a transistors
amplificatori a BJT e FETs
Termometro a diodo
se I D1 >> 0 → I D1 ≈ I S 1e
VD 1
VT
VPTAT = VD1 − VD 2 =
I D1
I D2
− VT ln
≈ VT ln
I S1
IS2
D1 e D 2 identici ( I S 1 = I S 2 )
kT I D1
∝ T
=
ln
q I D2
Es: T=295 K, ID1=250µA, ID2=50µA
VPTAT=40.9 mV
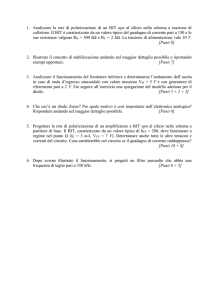
Circuiti limitatori
analisi con il modello a caduta costante
• la serie del diodo e VR può essere
vista come un diodo con V’on=Von+VR
• vin≤ V’on D-OFF vout = vin
Caratteristica di trasferimento (in(in-out)
v in
2
v out
3
2
0
-2
0
Vout (V)
amplitude (V)
• vin≥ V’on D-ON vout = V’on
V’on=2V
0.2
0.4
0.6
time (ms)
0.8
1
supponiamo che vin sia sufficientemente lento
in modo tale da trascurare le capacità del diodo
1
0
-1
-2
-3
-3
-2
-1
0
Vin (V)
1
2
3
Circuiti limitatori
analisi con il modello a caduta costante
+
-
vD
+
vin
• la serie del diodo e VR può essere vista
come un diodo con V’on=Von-VR
vout
• -vin≤ V’on D-OFF vout = vin
VR
-
• -vin≥ V’on D-ON vout = -V’on
Caratteristica di trasferimento (in(in-out)
v out
2
3
2
0
-2
0
Vout (V)
amplitude (V)
v in
V’on=2V
0.2
0.4
0.6
time (ms)
0.8
1
supponiamo che vin sia sufficientemente lento
in modo tale da trascurare le capacità del diodo
1
0
-1
-2
-3
-3
-2
-1
0
Vin (V)
1
2
3
Circuiti limitatori
analisi con il modello a caduta costante
• la serie di D1 e VR1 può essere vista come un
diodo con V’on1=Von1+VR1
• la serie di D2 e VR2 può essere vista come un
diodo con V’on2=Von2-VR2
• vin≤ -V’on2
D1-OFF/D2-ON
•-V’on2 ≤ vin≤V’on1 D1-OFF/D2-OFF
• vin≥V’on1
D1-ON/D2-OFF
Caratteristica di trasferimento (in(in-out)
v out
2
3
0
-2
0
2
Vout (V)
amplitude (V)
v in
vout = -V’on2
vout = vin
vout = V’on1
V’on1= V’on1 =2V
0.2
0.4
0.6
time (ms)
0.8
1
supponiamo che vin sia sufficientemente lento
in modo tale da trascurare le capacità del diodo
1
0
-1
-2
-3
-3
-2
-1
0
Vin (V)
1
2
3
Esempio SPICE
Problema: dato il circuito di figura con VR1=3V, VR2=2V, R1=1kΩ, ΙS=1pA
• simulare la risposta temporale ad un ingresso sinusoidale (ampiezza 5V,
freq=1kHz)
• simulare la caratteristica in-out per -5≤VIN≤5
circuito limitatore a diodi
VIN 1 0 DC 0 SIN(0 5 1e3)
R1 1 2 1e3
D1 2 3 Dmodel
VR1 3 0 DC 3
D2 4 2 Dmodel
VR2 4 0 DC 2
.MODEL Dmodel D IS=1e-12
.TRAN 1e-5 2e-3
.DC LIN VIN -5 5 0.1
.PROBE V(1) V(2)
.END
Raddrizzatori e regolatori a diodi
• utilizzati negli alimentatori per convertire la tensione di rete alternata da
230Vrms-50Hz in tensioni continue per alimentare i dispositivi elettronici
• un raddrizzatore converte una tensone alternata (ac) a valor medio nullo in
una tensione a valor medio diverso da zero
• un filtro provvede a ridurre le ondulazioni in uscita al raddrizzatore
• il regolatore provvede a stabilizzare la tensione in uscita
Raddrizzatore a semionda
analisi con il modello ideale
•lo stato del diodo varia nel
tempo e il diodo si trova in
ognuna delle regioni del
modello lineare a tratti solo per
un intervallo di tempo limitato
• supponiamo che vS sia
sufficientemente lento in modo
tale da trascurare le capacità del
diodo
vS ≥ 0
vS ≤ 0
Hp D-ON
Hp D-OFF
vO = vS
iD = iR =
vO = 0
vS
≥0⇒
R
Hp OK
v D =v S ≤ 0 ⇒
Hp OK
Raddrizzatore a semionda
analisi con il modello a caduta costante
• D ON solo quando vS≥Von
vO=vS-Von
• D OFF solo quando vS≤Von
• si vuole bassa Von<<vS
amplitude (V)
vS
vO
2
Von
0
-2
0
0.5
1
time (ms)
1.5
2
vO=0
Raddrizzatore con filtro capacitivo
analisi semplificata senza carico (R→∞)
si vuole bassa Von<<vS
vO (0) = 0
t ≤ t1
Hp : D - OFF
vD = vS − vO = vS ≤ Von ⇒ Hp OK
t1 ≤ t ≤ T / 4
Hp : D - ON
iD = C
t ≥T /4
Hp : D - OFF
dvO
d (vS − Von )
dv
=C
= C S ≥ 0 ⇒ Hp OK
dt
dt
dt
vD = vS − (VP − Von ) = (vS − VP ) + Von ≤ Von ⇒ Hp OK
vO = 0
vO = vS − Von
vO = VP − Von
Raddrizzatore con filtro capacitivo
analisi con carico
vD
-
+
R
C
vS
+
vO
-
vO ( 0 ) = 0
t ≤ t1
t1 ≤ t ≤ t 2
Hp : D - OFF
Hp : D - ON
v D = v S − vO = v S ≤ Von ⇒ Hp OK
iD = C
dv O vO
+
=
dt
R
dv S v S − Von
+
≥ 0 ⇒ Hp OK
dt
R
dv
v S − Von
t = t 2+
C S <0
>0
dt
R
dv
v − Von
t = t 2'
iD = C S + S
=0
dt
R
(RC → ∞ )
Assumiamo t 2' − t 2 ≈ 0
=C
(
vO = v S − Von
D - ON
D - OFF
)
vO t − t 2 ≈ (VP − Von )e
t 2 ≤ t ≤ t3
D - OFF
t = t3
v D = v S − vO = Von ⇒
vO = v S − Von
D - ON
−
t −t2
RC
vO = v S − Von
Raddrizzatore con filtro capacitivo
analisi con carico
vD
+
C
+
vO
-
R
vS
Vr = (VP − Von ) − (VP − Von )e
La tensione di uscita contiene ondulazioni
residue di ampiezza Vr (tensione di ripple)
Vr può essere ridotta facendo RC>>T
se ∆T<<T
T
Vr ≈ (V p − Von )
RC
−
T − ∆T
RC
T − ∆T
−
RC
= (VP − Von )1 − e
T − ∆T
Vr ≈ (V p − Von )
RC
e− x ≈ 1 − x
x <<1
=
Raddrizzatori a diodi
• rectifier diodes: ottimizzati per alte tensioni/correnti in pol. diretta e inversa
• in applicazioni di precisione a bassa potenza si vuole bassa Von: diodi Schottky
Esempio SPICE
Problema: simulare la risposta temporale, ad un ingresso sinusoidale (ampiezza
10V, freq=1kHz), di un raddrizzatore a diodo (IS=1pA) con filtro capacitivo,
RL=1kΩ e al variare di C= 100nF, 1µF, 10 µF.
raddrizzatore con filtro capacitivo
.PARAM C1val=10u
VS 1 0 DC 0 SIN(0 10 1e3)
D1 1 2 Dmodel
.MODEL Dmodel D IS=1e-12
C1 2 0 {C1val}
RL 2 0 1e3
.TRAN 1e-5 2e-3
.STEP PARAM C1val LIST 100n 1u 10u
.PROBE V(1) V(2)
.END
Regolatore di tensione a diodo Zener
Regolatore di tensione: circuito che mantiene la tensione su un carico
costante a partire da una tensione di ingresso di valore diverso.
vS(t): segnale di ingresso variabile
RL: carico
se vS(t) è tale da polarizzare sempre DZ in breakdown (hp.RZ=0)
vL(t) rimane costante anche se vS(t)
varia
Regolatore di tensione a diodo Zener
Condizione di regolazione:
regolazione: iZ≥0
Hp DZ in breakdown
iZ = iS − i L =
v S − VZ VZ
−
≥0
R
RL
R
R
≥
= RL min
L v
S
−
1
V
Z
vS ≥ VZ 1 + R = vS min > VZ
R
L
Regolatore di tensione a diodo Zener
Condizione di regolazione:
regolazione: iZ≥0
RZ≠0
iL
R
vS
iS
iZ
+
VZ
RL v L
-
vS VZ
+
R RZ
v =
L 1 1
1
+
+
R RZ RL
RL ≥
RZ
v −V
i = L Z ≥0
Z
R
Z
R
vS
− 1
VZ
= RL min
• la tensione di uscita risulta funzione di vS e RL
• regolazione di linea:
1
dVL
R // RZ // RL
R
=
=
dVS 1 + 1 + 1
R
R RZ RL
• per valori bassi di RZ, la variazione della VL è modesta
Regolatore di tensione a diodo Zener: Esempio
Hp: DZ in breakdown
IS =
VS −VZ
R
VZ
=
(20 − 5)V
= 3 mA
5kΩ
5V
=1 mA
RL 5kΩ
I Z = I S − I L = 2 mA ≥ 0 ⇒
IL =
=
Hp OK
Condizione di regolazione
RL ≥
R
VS
VZ
−1
=R
=1.67kΩ
L, min
Regolatore di tensione a diodo Zener: Esempio
RZ≠0
Hp: D in breakdown
VS VZ
+
R RZ
V =
= 5.19 V
L 1 1
1
+
+
R RZ RL
V −V
5.19V − 5V
I = L Z =
= 1.9 mA ≥ 0
Z
R
100Ω
Z
Hp OK
Esempio SPICE
Problema: Simulare il punto di lavoro e la caratteristica VRL(VS) per 0≤VS
≤20V e RL=1kΩ, 2kΩ, 5kΩ.
1
2
regolatore con diodo zener
.PARAM Rval=5e3
VS 1 0 DC 20
R1 1 2 5e3
DZ 0 2 Dmodel
RL 2 0 {Rval}
.model Dmodel D BV=5
.OP
.DC VS 0 20 0.1
.STEP PARAM Rval LIST 1e3 2e3 5e3
.PROBE V(1) V(2)
.END
0
Optoelettronica: LED
I diodi emettitori di luce (LEDs)
utilizzano processi di ricombinazione
nella SCR per produrre luce.
EC
h =EG
EG
EV
Semiconduttore Colore
AlGaAs
rosso , infrarosso
GaAlP
verde
GaAsP
rosso, arancione, giallo
GaN
verde, blu
GaP
rosso, giallo e verde
InGaN
blu-verde, blu
InGaAlP
rosso-arancione,
arancione, giallo e verde
Optoelettronica: Fotodiodi (1)
se la SCR di un diodo a giunzione pn viene
illuminata da una radiazione a frequenza
sufficientemente elevata, i fotoni possono fornire
energia sufficiente affichè alcuni elettroni passino
dalla banda di valenza a quella di conduzione
generando coppie elettrone-lacuna e una
fotocorrente iPH
Optoelettronica: Fotodiodi (2)
• nei fotorivelatori, il diodo è in
polarizzazione
inversa
per
aumentare la larghezza della SCR
ovvero il numero di coppie e-h e la
fotocorrente iPH.
• il punto di lavoro è fissato dalla
batteria VB e da RL.
• Vout=iPH RL
Applicazioni: fotorivelatori, compact disk,....
Conversione dell’energia: celle solari
• fotodiodi di larga area e con
illuminazione costante IPH è costante
• l’obiettivo è quello di estrarre potenza
dalla cella, ovvero ICVC deve essere
positivo
• la cella dovrebbe operare in prossimità
della massima potenza di uscita Pmax.
Contenuti del corso
Introduzione e concetti fondamentali
Parte I: Dispositivi Elettronici
il diodo a giunzione
transistori ad effetto di campo (FETs)
MOSFET
struttura e funzionamento
analisi dei circuiti con FETs
esempi di circuiti applicativi
JFET
il transistore bipolare (BJT)
Parte II: Circuiti amplificatori a transistors
amplificatori a BJT e FETs
Il transistor: principio di funzionamento
Transistor = Transfer Resistor (resistenza di trasferimento)
• dispositivo elettronico con 3 terminali
• la tensione (corrente) al terminale di controllo
determina la conducibilità (corrente) tra i
terminali A e B
• se la corrente assorbita dal terminale di
controllo è trascurabile
il dispositivo si
comporta come un resistore non lineare tra A e B
Applicazioni principali:
interruttore controllato (elettronica digitale)
amplificazione di segnali elettrici (elettronica analogica)
Il transistore MOSFET
• transistori FET (Field Effect Transistors): MOSFETs e JFETs
• il MOSFET (Metal-Oxide-Semiconductor FET) è il componente
fondamentale dei circuiti digitali VLSI, come i microprocessori e le memorie.
• largamente utilizzato in elettronica analogica: amplificatori, riferimenti di
tensione/corrente,....
• ideato da Lilienfield (1928), Heil
(1935) e Schockley (1952).
• solo negli anni ‘60 viene
sviluppato un processo affidabile per
dispositivi commerciali
il sistema MOS
• gate: materiale a bassa resistività, inizialmente silicio policristallino, adesso metallo
• ossido: inizialmente SiO2, attualmente HFO2.
• substrato (Body) : silicio di tipo n (PMOS) o p (NMOS). La possibilità di realizzare
un ossido di grande qualità è una delle ragioni fondamentali del successo del Silicio.
• il sistema MOS costituisce una capacità non lineare (condensatore MOS). In
condizioni stazionarie la corrente di gate è nulla.
il sistema MOS polarizzato
-
VG << 0
Regione di accumulazione (VG<<0): le lacune
sono spinte dal campo elettrico verso l’interfaccia
creando uno strato di accumulo superficiale.
Regione di svuotamento (VG>0):
• lacune sono spinte dal campo elettrico lontano
dall’interfaccia, creando una SCR (carica fissa)
+
• elettroni sono attratti alla superficie (carica mobile)
+
VG > 0
Tensione di soglia (VTN): VG per cui la
concentrazione di elettroni diventa pari al
drogaggio p (inversione di popolazione).
Valore tipico: ~1V.
-
Regione di inversione: VG≥VTN
il sistema MOS polarizzato
Regione di soprasoglia (inversione)
(VG ≥ VTN)
− Qn
− Q n ∝ (V G − V TN
V TN
Regione di sottosoglia
(VG < VTN)
− Qn ∝ e
V G − V TN
VT
≈0
)
VG
La carica mobile può essere
controllata dall’elettrodo di gate:
regione a conducibilità variabile
(non lineare).
MOSFET a canale n (nMOSFET)
realizzando due elettrodi (Drain, Source)
che accedono alla regione di carica mobile
(canale) si realizza un transistor nMOSFET
D
G
B
S
• 4 terminali: Gate(G), Drain(D), Source(S) e Body o Bulk (B).
• canale: regione dello strato di inversione (carica mobile)
• L: lunghezza di Gate (canale)
• struttura simmetrica: VS≤VD
MOSFET a canale n (nMOSFET)
larghezza di Gate
MOSFET a canale n (nMOSFET)
• le regioni di S e D formano
giunzioni pn con il substrato che
vanno polarizzate in inversa
VB=VMIN=0V, VS≥0,VD≥0, IB≈0
• IG=0, IB=0
ID = -IS
• il B tipicamente non viene
indicato
D
D
G
G
B
la freccia indica il verso delle
giunzioni B-S e B-D
S
la freccia indica il S e il
verso della corrente positiva
S
MOSFET a canale n (nMOSFET)
VGS<<0 : MOS in accumulazione, non
esiste canale, regioni di svuotamento SB e
DB.
VGS<VTN: MOS in svuotamento, non esiste
canale, la regione di svuotamento sotto il
gate si unisce alle regioni di svuotamento di
S e D.
VGS≥VTN: oltra alla regione di svutotamento
si forma il canale tra S e D.
MOSFET a canale n (nMOSFET)
se VGS≥VTN e VDS>0, una corrente ID > 0 fluisce tra D e S.
Tale corrente dipende da:
•VGS : determina la “R” (non lineare) del canale
•VDS: come in un resistore I=V/R
Caratteristica IV del nMOSFET
I D = − I S = f (V GS , V DS
ID
V GS
0
V DS2 V GS
K (V − V TN )V DS −
= N GS
2 V DS
KN
V GS
2
(
V GS − V TN )
2
V DS
)
≤ V TN
interdizione
≥ V TN
triodo
≤ V GS − V TN
≥ V TN
saturazione
≥ V GS − V TN
il modello è completamente
W
K N = K N'
definito dai due parametri KN e VTN
L
K N' = µ N C OX
C OX =
ε OX
t OX
Caratteristica IV del nMOSFET
(
)
caratteristica di trasferimento
trasferimento::
I D = f V GS , V DS
caratteristica di uscita
uscita::
I D = f V DS , V GS
(
)
Caratteristica di trasferimento
(
I D = f V GS , V DS
)
ID
0
V DS2
= K N (V GS − V TN )V DS −
2
KN
(V GS − V TN )2
2
OFF
TRIODO
SAT.
transconduttanza
gm
V GS ≤ V TN
V DS ≥ V GS − V TN
V GS ≥ V TN
V DS ≤ V GS − V TN
V GS ≥ V TN
g m , SAT
∂I D
=
∂ V GS
Q
2ID
=
V GS − V TN
Caratteristica di trasferimento
2000
ID (uA)
1500
K N = 100 μA/V
2
V TN = 2 V
1000
VDS=1V
500
VDS=2V
VDS=3V
0
0
2
4
VGS (V)
6
8
10
Caratteristica di uscita
(
I D = f V DS , V GS
)
ID
0
V DS2
= K N (V GS − V TN )V DS −
2
KN
(V GS − V TN )2
2
OFF
TRIODO
SAT.
In saturazione il MOSFET approssima il comportamento di un
generatore di corrente ideale. Applicazione: riferimenti di corrente
Caratteristica di uscita
4000
K N = 100 μA/V
2
V TN = 2 V
ID (uA)
3000
VGS=2V
VGS=4V
2000
VGS=6V
VGS=8V
VGS=10V
1000
0
0
2
4
VDS (V)
• la corrente di saturazione cresce
quadraticamente con VGS
• per bassi valori di VDS le
caratteristiche sono lineari
6
I D , sat = K N
8
10
(VGS − VT )2
2
Regione lineare
500
in zona triodo
VDS
I D = K N (VGS − VTN ) −
VDS
2
400
ID (u A )
300
200
se VDS / 2 << VGS − VTN (regione lineare)
0
0
I D ≈ K N (VGS − VTN )VDS
VDS ≈ RDS I D
Regione lineare:
RDS ≈
100
1
K N (VGS − VTN )
0.2
0.4
VDS (V)
0.6
0.8
1
in regione lineare il MOSFET si
comporta come un resistore
connesso tra S e D (RDS)
controllato dalla VGS
VDS VGS − VTN
V − VTN
≤
→ VDS ≤ GS
2
10
5
Modelli equivalenti in DC
D
IG=0
ID=0
interdizione
G
S
D
IG=0
I D ,sat = K N
G
(VGS − VT )2
2
saturazione
S
D
IG=0
G
RDS =
S
1
K N (VGS − VT )
lineare
nMOSFET a svuotamento
D
G
S
• nMOSFET con VTN≥0 sono detti ad arricchimento
• nMOSFET con VTN≤0 sono detti a svuotamento
• viene realizzata una regione di tipo n che collega le regioni di source e drain
• per VGS=0 la corrente di drain è diversa da zero, e per interdire il dispositivo è
necessaria una VGS negativa.
MOSFET a canale p (pMOSFET)
VG
VS
VD
ID
IG
IS
• pMOSFET=pMOS+2 regioni p+
• inversione di lacune per VGB ≤ VTP
• VTP<0
per
arricchimento
VB
arricchimento
D
D
B
S
svuotamento
ad
• le regioni di S e D formano
giunzioni pn con il substrato che
vanno polarizzate in inversa (IB≈0)
VB=VMAX=VDD, VSB ≤0, VDB ≤ 0,
IB
G
dispositivi
G
S
• IG=0, IB=0
• struttura
(VDS≤0)
IS = -ID
simmetrica:
VS≥VD
Caratteristica IV del pMOSFET
I S = − I D = f (V GS , V DS
0
V DS2
K (V − V TP )V DS −
I S = P GS
2
KP
2
(
V GS − V TP )
2
W
L
= µ P C OX
K P = K P'
K P'
)
V GS ≥ V TP
interdizione
V GS ≤ V TP
V GS − V TP ≤ V DS
triodo
V GS ≤ V TP
V GS − V TP ≥ V DS
saturazione
• VGS tipicamente <0
• il modello è completamente
definito dai 2 parametri KP e VTP
Caratteristiche di uscita
i primi MOSFET erano pMOS. Col miglioramento dei processi
(‘70) la tecnologia diventa nMOS con aumento delle prestazioni
dovuti alla maggiore mobilità degli elettroni rispetto alle lacune.
Capacità del transistore MOS
Gli effetti capacitivi più importanti sono CGS e CGD:
CGD
D
• dovuti a Cox e CGSO (CGDO)
G
• dipendono dal punto di lavoro
• riduzione del
amplificatori
guadagno
ad
alta
f
negli
• limitano la f di funzionamento nei circuiti digitali
S
CGS
Capacità del transistore MOS: modello di Meyer
C
= C WL
GC ox
capacità gate-canale
zona lineare
C
C = GC + C
W
GS
GSO
2
C
C
= GC + C
W
GD
GSO
2
CGD
saturazione
W
C = 2 C +C
GS 3 GC GSO
D
C
=C
W
GD GDO
G
interdizione
C =C
W
GS GSO
C
=C
W
GD GDO
S
CGS
MOSFET reali
Modulazione di lunghezza di canale:
nei MOSFET a canale corto (L<1µm)
2
(
VGS − VTN )
(1 + λVDS )
I D , sat = K N
2
Corrente di sottosoglia
Effetto Body
contribuisce
alla
potenza
dissipata in applicazioni digitali
Modello SPICE per il MOSFET
Sintassi:
M<name> <ND> <NG> <NS> <NB> <MNAME> [L=VAL] [W=VAL]
+[AD=VAL] [AS=VAL] [PD=VAL] [PS=VAL] [NRD=VAL] [NRS=VAL]
+[OFF] [IC=VDS, VGS, VBS] [TEMP=T]
ND, NG, NS, NB :
MNAME
L:
W:
AD, AS:
PD, PS:
NRD, NRS:
nodi di drain, gate, source, sub.
nome del modello
lunghezza canale
larghezza
aree di drain e source
perimetri di drain e source
source/drain “sheet resistance”
7 modelli impostabili attraverso il parametro LEVEL
Esempio:
M1 24 2 0 20 TYPE1
.MODEL TYPE1 NMOS LEVEL=3
LEVEL=1 :
LEVEL=2 :
LEVEL=3 :
LEVEL=4 :
LEVEL=5 :
LEVEL=6 :
LEVEL=7 :
Shichman-Hodges model
geometry-based, analytic model
semi-empirical, short-channel model
BSIM model
EKV model version 2.6
BSIM3 model version 2.0
BSIM3 model version 3.1
MOSFET: modello in continua (LEVEL=1)
MOSFET: modello in continua (LEVEL=1)
K
'
n
(K
'
p
)
MOSFET: modello per ampi segnali
Esempio
Problema: simulare le caratteristiche di uscita di un transistore nMOSFET
(K’N=100µA/V2, W=10µm, L=1µm, VTN=1.5V, LEVEL1) nell’intervallo
0≤VDS≤15V, per 0 ≤ VGS≤ 10V.
caratteristiche di uscita nMOSFET
Vgs 1 0 DC 0
Vds 2 0 DC 0
M1 2 1 0 0 Mmodel L=1u W=10u
.MODEL Mmodel NMOS KP=100e-6
+VTO=1.5 LEVEL=1
.DC Vds 0 15 0.1 Vgs 0 10 1
.PROBE ID(M1)
.END
Contenuti del corso
Introduzione e concetti fondamentali
Parte I: Dispositivi Elettronici
il diodo a giunzione
transistori ad effetto di campo (FETs)
MOSFET
struttura e funzionamento
analisi dei circuiti con FETs
esempi di circuiti applicativi
JFET
il transistore bipolare (BJT)
Parte II: Circuiti amplificatori a transistors
amplificatori a BJT e FETs
Analisi in DC dei circuiti con MOSFET
V GG = V GS
V DD = R D I D + V DS
I = f (V , V )
DS
GS
D
risoluzione grafica
risoluzione analitica
1. ipotesi su f (OFF, triodo o saturazione)
2. si risolve il circuito e si determina Q
3. si verifica l’ipotesi 1
Analisi DC dei circuiti con MOSFET: Esempio 1
Problema: determinare Q
Dati: KN=50 µA/V2, VTN=1V
VGG=2V, VDD=5V, RD=8.3 kΩ
Soluzione:
VGS=VGG=2V
VGS-VTN=1V≥0
M-ON
VGS-VTN=1V </>? VDS
Hp: M-SAT
K
(
)
2 = 25 µ A
n V
−V
D
GS
TN
2
V
=V
−R I =
DS
DD
D D
= 4 . 79 V ≥ V
−V
= 1V → Hp OK
GS
TN
I
=
Q: (ID=25 µA, VGS=2 V, VDS=4.79V)
Analisi DC dei circuiti con MOSFET: Esempio 2
Problema: determinare Q
Dati: KN=250 µA/V2, VTN=1V, VDD=4V, RD=1.6 kΩ
Hp M-TRIODO
V GS = V DD = 4V
K
n V
I
=
−V
−V
/2V
D
GS
TN
DS
DS
2
=V
−R I
V
DD
D D
DS
(
)
VDD − VDS K n
I =
=
V
−V
−V / 2 V
D
DS
DS
RD
2 GS TN
(
2 soluzioni:
VGS=VDD=4 V
VGS-VTN=3V </>? VDS <4V
Hp: M-SAT
V
DS
)
= 2.3V,8.7V
VDS= 8.7 V > VGS-VTN =3 Hp NO
V =2.3V≤V -V
Hp OK, ID=1.06 mA
DS
GS
TN
V GS = V DD = 4 V
Q:(ID=1.06 mA, VDS=2.3
K
2 = 1 . 13 mA
n V
I
=
−
V
D
GS
TN
2
=V
− R I = 2 . 19 V ≤ V
−V
→ Hp NO
V
DD
D D
GS
TN
DS
(
)
V, VGS=4V)
Analisi DC dei circuiti con MOSFET: Esempio 3
Problema: determinare Q
Dati: KN=25 µA/V2, VTN=1V, VDD=10V
R1=1 MΩ, R2=1.5 MΩ, RD=75 kΩ, RS=39 kΩ
VDD
R2
RD
M1
R1
RS
Vth = VDD
R1
= 4V
R1 + R2
Rth = R1 // R2 = 600kΩ
Vth = VGS + RS I D
VDD = (RD + RS )I D + VDS
I = f (V , V )
GS
DS
D
Analisi DC dei circuiti con MOSFET: Esempio 3
Vth = VGS + RS I D
VDD = (RD + RS )I D + VDS
I = f (V , V )
GS
DS
D
Hp M-SAT
V
Kn R
2
S
V
−V
V =V +
th GS
TN
GS
2
2 soluzioni: V = −2.71V,+2.66V
GS
VGS<VTN per VGS= -2.71V (non valida)
V =+2.66V
GS
ID= 34.4 µA
DD
= I ( R + R ) +V → V
= 6.08V
D D S
DS
DS
VDS≥VGS-VTN
Hp OK
Q: (ID=34.4 µA, VDS=6.08 V, VGS= 2.66 V)
Analisi DC dei circuiti con MOSFET: Esempio 4
Problema: determinare Q
Dati: KN=260 µA/V2, VTN=1V, VDD=3.3V, RD=10 kΩ, RG=2 MΩ
Kn R
2
D V −V
=V
−
V =V
DD
GS
DS
2 GS TN
2 soluzioni:
IG =0
V = −0.769V,+2.00V
GS
VG=VD
VDS=VGS≥VGS-VTN
M-SAT se ON
VGS= -0.769 V non accettabile (M-OFF)
Hp M SAT
V
=V
GS
DS
V DS = V DD − R D I D
K
2
n V
I
=
−V
D
GS
TN
2
(
)
V = +2.00V → I = 130µA
D
GS
V
= 2V ≥ V −V = 1V Hp OK
DS
GS TN
Q: (ID=130 µA, VDS=VGS=2.00 V)
Contenuti del corso
Introduzione e concetti fondamentali
Parte I: Dispositivi Elettronici
il diodo a giunzione
transistori ad effetto di campo (FETs)
MOSFET
struttura e funzionamento
analisi dei circuiti con FETs
esempi di circuiti applicativi
JFET
il transistore bipolare (BJT)
Parte II: Circuiti amplificatori a transistors
amplificatori a BJT e FETs
Amplificatori a MOSFET
• amplificazione di segnali
• MOSFET non lineare
• funzionamento linerare in condizione di piccolo segnale
il MOSFET in elettronica digitale
Il MOSFET può essere utilizzato come un interruttore controllato dalla tensione di
gate, la quale agisce come terminale di controllo
•
in interdizione il MOSFET è assimilabile ad un interruttore aperto tra D e S
•
in zona lineare il MOSFET è assimilabile ad un interruttore chiuso tra D e S (VDS≈0)
interuttore normalmente
(VGS=0) aperto
interuttore normalmente
(VGS=0) chiuso
il MOSFET in elettronica digitale
• in elettronica digitale tale comportamento è usato per la realizzazione delle
porte logiche
• le prime porte logiche erano realizzate usando solo transistori nMOS.
• negli anni ’80 la tecnologia nMOS viene sostituita con la CMOS
(complementary MOS) con drastica riduzione della potenza dissipata.
invertitore logico CMOS
in=‘0’
Mn OFF, Mp ON
out=‘1’
in=‘1’
Mn ON, Mp OFF
out=‘0’
Lo scaling dei transistor: i circuiti integrati
minimum feature size (µm)
Transistors “discreti”
i miglioramenti nei processi tecnologici consentono
la riduzione della minima L (minimum feature size)
Transistors “integrati”
1958: Kilby e Noice sviluppano
il primo circuito integrato
Lo scaling dei transistor: la legge di Moore
Legge di Moore: « Le prestazioni dei processori, e il numero di
transistor ad esso relativo, raddoppiano ogni 18 mesi. »
Riferimenti di corrente a MOSFET
VDD
rete di
polarizzazione
RL
RG
VGG
RS
VSS
• in saturazione la corrente sul carico RL è costante
• se VGG>0, VSS≥0
VDD > 0 (cond. necessaria)
• se RL ha bisogno del riferimento a massa
(VDD=0) VGG<0, VSS<0 (cond. necessaria)
• per evitare tensioni negative è possibile usare
riferimenti con pMOSFETs
il MOSFET come driver di corrente
•la max corrente erogabile dalla sorgente è VS/RS
•la corrente ILED è limitata da RS
• IG=0
+
VLED
-
ILED
RD
I LED =
VS − VLED
RS
VS non deve erogare corrente!
VDD − VLED − VDS
• la corrente ILED è fornita I
=
LED
RD
da VDD e non da VS
VDD
RS
M1
VS
IG
• M1 tipicamente si polarizza in zona lineare
poichè la più bassa VDS consente di avere una più
bassa VDD (minore potenza dissipata)
il MOSFET come driver di corrente
Problema: dimensionare RD in modo che ILED=20mA
+
DATI: VS=5V, RS=5kΩ, VDD=10V, VLED,ON=1.1V
VLED
Q1: (KN’=100µA/V2, VTN=1V, W=100µm, L=1µm )
-
ILED
RD
VDD
RS
Hp M1: LINARE, D ON
RDS =
VDS =
RD =
1
= 25Ω
K N (VS − VTN )
VDD − VLED ,ON
RDS + RD
VDD − VLED ,ON
I LED
RDS
M1
VS
IG
VGS − VTN
≤
→ RD ≥ 253Ω
5
− RDS = 420Ω
Hp OK
Contenuti del corso
Introduzione e concetti fondamentali
Parte I: Dispositivi Elettronici
il diodo a giunzione
transistori ad effetto di campo (FETs)
MOSFET
struttura e funzionamento
analisi dei circuiti con FETs
esempi di circuiti applicativi
JFET
il transistore bipolare (BJT)
Parte II: Circuiti amplificatori a transistors
amplificatori a BJT e FETs
Junction Field-Effect Transistor (JFET)
JFET a canale n: substrato n (canale)
e due giunzioni pn che costituiscono il
gate.
Le
giunzioni
devono
essere
polarizzate in inversa così che iG≈0 e
iD≈iS.
La regione non svuotata è il canale.
Dispositivo a 3 terminali:
gate, source e drain.
Sebbene meno diffuso del MOSFET, il JFET è
largamente impiegato sia in elettronica discreta
che integrata, principalmente in applicazioni
analogiche e RF.
Negli IC è spesso impiegato in processi BiFET,
che combinano BJT e JFET.
Per VDS≈0 il JFET si comporta tra S e
D come un resistore controllato in
tensione di valore
RDS = ρt L
W
La VG modula la larghezza delle
regioni di svuotamento e quindi W,
RDS e la corrente ID≈VDS/RDS
JFET con polarizzazione Gate-Source (VDS≈0)
vGS=0, le giunzioni sono polarizzate
in inversa e iG≈0
al diminuire di vGS≤0 aumenta la
larghezza delle regioni di svuotamento
(diminuisce W) e aumenta la R = ρ L
DS
tW
quando vGS=VP<0 (VP tensione di pinchoff) il canale si strozza e RDS ∞
La corrente è max per vGS=0
un dispositivo a svuotamento
il JFET è
JFET con polarizzazione VDS>0
all’aumentare di vDS la larghezza della
regione di svuotamento non è più
uniforme e il canale si comporta come un
resistore non lineare.
quando vDS=vGS-VP il canale si
strozza lato drain.
per vDS≥vGS-VP la corrente satura e
il punto di pinch-off si avvicina lato
source.
Caratteristica IV del JFET a canale n
Formalmente identico a quello del MOSFET, con VP che
prende il posto di VTN e 2IDSS/VP2 che prende il posto di KN.
iD = 0 for vGS ≤VP
iD =
2I DSS
VP
iD = I
vGS −VP −
2
DSS
1−
2
GS
P
v
V
interdizione (OFF)
P
V < 0
vDS
vDS
2
1+ λvDS
vGS ≥VP vGS −VP ≥VDS ≥ 0
vDS ≥ vGS −VP ≥ 0
triodo
saturazione (pinch(pinch-off)
Caratteristica IV del JFET a canale n
Caratteristica di trasferimento
in saturazione
iD = I
DSS
1−
GS
P
v
2
V
-25V<VP<0
10 µA<IDSS<10A
Caratteristiche di uscita
JFET a canale p
Modello SPICE del JFET
Sintassi:
J<name> <ND> <NG> <NS> <model name> [area value]
Esempio:
J13 22 14 23 JNOM
.model JNOM NJF BETA=1e-5
Esempio
Problema: simulare la caratteristica di uscita di un JFET a canale n (VP = - 2V,
IDSS=40µA) per VGS=0 nell’intervallo 0≤VDS≤5V.
caratteristiche di uscita di un nJEFT
Vgs 1 0 DC 0
Vds 2 0 DC 0
J1 2 1 0 Jmodel
.MODEL Jmodel NJF BETA=1e-5
+VTO=-2
.DC Vds 0 5 0.1
.PROBE ID(J1)
.END
Analisi in DC dei circuiti con JFET
Il JFET è polarizzato come un MOSFET a svuotamento
JFET a canale n
nMOSFET a svuotamento
VDD
RD
RG
RS
• le giunzioni devono sempre essere polarizzate in inversa
• non è necessario collegare un circuito di alimentazione al gate poichè VP<0
Analisi in DC dei circuiti con JFET: Esempio
Problema: determinare l’OP di J.
I
G
= 0, I = I → V
= −I R
S
D
GS
D S
ON o OFF ?
Hp M OFF
Hp NO
ID=0
M ON
VGS=0>VP
J
TRIODO o SAT. ? Hp SAT.
2
V
= −I
V
R 1 − GS
GS
DSS S
V
P
2 soluzioni : V
= −1.91V, − 13.1V
GS
VGS = -13.1 V< VP = -5 V non accettabile
VGS = -1.91 V
ID = IS =-VGS/RS= 1.91 mA
VDS = VDD − I D ( RD + RS ) = 6.27V ≥ V −V = 3.09V
GS P
Q: (ID=1.91 mA, VDS=6.27 V, VGS=-1.91V)
Hp OK
Datasheets
Contenuti del corso
Introduzione e concetti fondamentali
Parte I: Dispositivi Elettronici
il diodo a giunzione
transistori ad effetto di campo (FETs)
il transistore bipolare (BJT)
struttura e funzionamento
analisi dei circuiti con BJTs
esempi di circuiti applicativi
Parte II: Circuiti amplificatori a transistors
amplificatori a BJT e FETs
Contenuti del corso
Introduzione e concetti fondamentali
Parte I: Dispositivi Elettronici
il diodo a giunzione
transistori ad effetto di campo (FETs)
il transistore bipolare (BJT)
struttura e funzionamento
analisi dei circuiti con BJTs
esempi di circuiti applicativi
Parte II: Circuiti amplificatori a transistors
amplificatori a BJT e FETs
Il transistore bipolare (BJT)
Il BJT (Bipolar Junction Transistor) è un dispositivo a tre terminali costituito
dall’adiacenza di due giunzioni pn. Sono quindi possibili due configurazioni:
transistore PNP
E
transistore NPN
C
p
emettitore
C
n
collettore
JBE: giunzione
base-emettitore
E
p
n
base
JBC: giunzione
base-collettore
B
p
emettitore
collettore
JBE: giunzione
base-emettitore
C
base
n
p
E
B
C
p
B
n
n
B
p
n
E
JBC: giunzione
base-collettore
Il transistore bipolare (BJT)
Primo dispositivo a stato solido di ampio successo
commerciale a causa del processo di fabbricazione più
semplice e affidabile rispetto a quello dei MOSFETs.
• inventato alla fine dei ‘40 da Bardeen, Brattain e Shockley (Nobel nel ‘56) ai Bell Labs.
• reso disponibile nel ’52 dietro una licenza di 25000$
• il primo BJT al silicio fu sviluppato presso la Texas da Gordon Teal
• la Tokyo Tsushin Kogyo compra la licenza del transistor e nel ‘55 diventa la SONY.
• alla fine dei ‘50 inizia la produzione di massa di radio a BJT
• all’inizio dei ‘60 vengono realizzati i primi IC basati su BJTs
Anche se il MOSFET rappresenta oggi la tecnologia
dominante degli IC, il BJT è largamente utilizzato in
applicazioni ad alte frequenze e ad alte correnti.
Il transistore bipolare (BJT)
• il BJT sembra costituito semplicemente da due giunzioni pn.
• se la larghezza della regione di base è sufficientemente piccola (tipicamente
0.1 µm-100µm), le due giunzioni interagiscono.
•4 regioni di funzionamento in funzione delle 4 possibili combinazioni sullo
stato delle 2 giunzioni.
Il transistore bipolare (BJT)
• nella principale regione di funzionamento, detta regione attiva (JBE-ON, JCB-OFF), l’E
inietta elettroni nella regione di B. La maggior parte vengono raccolti dal C, mentre una
minoranza (se la base è stretta) si ricombinano in base e generano la IB.
• il rapporto IC/IB è molto alto se la base è stretta e il BJT può essere usato come
amplificatore.
• la base agisce come terminale di controllo, modulando la frazione di elettroni raccolti
dal collettore. Il BJT è un dispositivo controllato in corrente (di base), a differenza dei
FETs che sono controllati in tensione (gate-source). Mentre iG = 0, iB è significativa.
Il transistore bipolare (BJT)
• a differenza dei FETs in cui la conduzione è unipolare, ovvero dovuta principalmente
ad un solo tipo di portatore (elettroni negli nFETs, lacune nei pFETs), nei BJT la
conduzione avviene in modo bipolare.
• il funzionamento è basato sul trasporto dei minoritati nella base e quindi i BJT npn
sono preferiti ai pnp a causa della maggiore mobilità degli elettroni rispetto alle lacune.
• struttura non simmetrica: per massimizzare il numero di portatori raccolti dal
collettore l’emettitore è più drogato del collettore
Il modello DC di Ebers-Moll (npn)
•αF,αR <1: modellizzano
l’effetto
reciproco
delle
giunzioni
I
•il BJT non è simmetrico:
emettitore più drogato del
collettore αR<αF
I
F
=
0.95<αF<1
0<αR<0.95
•IS : corrente di saturazione
I
R
=
I
S
α
F
I
α
S
R
e
− 1
VVBC
e T − 1
V BE
VT
S
α
R
I
S
α
F
10-18A≤ IS≤10-9 A
• il modello DC è definito completamente da 3 parametri (IS, αF, αR)
Il modello DC di Ebers-Moll (pnp)
I
I
I
F
R
V EB
I S V T
=
e
− 1
α F
=
I
α
S
R
VVCB
e T − 1
S
α
R
I
S
α
F
Il modello DC di Gummel-Poon (npn)
iBC
i BE
V BE
I S V T
=
e
− 1
β F
i BC
V BC
I S V T
=
− 1
e
β R
iT= FiBE- RiBC
iBE
• i modelli di Ebers-Moll e Gummel-Poon sono
αR
equivalenti una volta che β F = α F
βR =
1−αF
• αF ≈ 1
1−αR
βF >> 1
• αF> αR βF > βR
• 3 parametri per descrivere completamente il modello in DC (IS, βF, βR)
Il modello DC di Gummel-Poon (pnp)
i EB
V EB
I S V T
=
e
− 1
β F
i CB
V CB
I S V T
=
e
− 1
β R
Esempio 1
Problema: Con riferimento al circuito in
figura determinare il punto di lavoro del
bjt caratterizzato dai parametri IS = 10-16 A,
βF = 50, βR = 1.
Soluzione:
VBE =VBB= 0.75 V
VBC = VBB - VCC = 0.75 V-5V = -4.25 V
Utilizzando la rappresentazione di Gummel-Poon
I BE
V BE
10 − 16 A
I S V T
=
− 1 =
e
50
βF
. 75
0 .00259
e
= 7 . 53 μA
−
1
V BC
10 − 16 A − 4 . 25
I S V T
e 0 .0259 − 1 = − 10 −16 A
I BC =
e
− 1 =
β R
1
I C = β F I BE − β R I BC − I BC = 376 μA
I B = I BE + I BC = 7 . 53 μA
I E = I B + I C = 384 μA
Esempio 2
Problema: Con riferimento al circuito in
figura determinare il punto di lavoro del
bjt caratterizzato dai parametri IS = 10-16 A,
αF = 0.95, αR = 0.5.
Soluzione:
IE = 100 µA
VBC = 0-5V = -5 V
Utilizzando la rappresentazione di Ebers-Moll
C
IR
IF
IF
IC
V BC
10 −16 A − 5
I S V T
e 0 .0259 − 1 = − 5 ⋅ 10 − 17 A
=
− 1 =
e
0.5
α R
= I E + α R I R ≈ I E = 10 − 4 A
V BE
I S V T
α I
=
e
− 1 → V BE = V T ln 1 + F F
IS
α F
= − I R + α F I F ≈ α F I F = 95 μA
I B = I E − I C = 5 μA
= 0 . 71 V
iC
iR
FiF
B
iB
iF
RiR
iE
E
Regioni di funzionamento
Regione attiva diretta (JBE ON, JBC OFF)
modello di EbersEbers-Moll
modello equivalente
a base comune
IC
C
E
IE
B
VCB
IC ≈ α F I F ≈ α F I E
α F ≅< 1 → I C ≅< I E
αF : guadagno di corrente
diretto a base comune
Regione attiva diretta (JBE ON, JBC OFF)
modello di GummelGummel-Poon
modello equivalente
a emettitore comune
VBE ,ON
IC = β F I B
β F >> 1 → I C >> I B
βF : guadagno di corrente
diretto ad emettitore comune
il BJT può essere usato come
amplificatore di segnale (corrente)
Regione attiva inversa (JBE OFF, JBC ON)
modello di EbersEbers-Moll
modello equivalente
a base comune
I E ≈ −α R I R ≈ α R I C
α R < 1 → I E < IC
αR : guadagno di corrente
inverso a base comune
Regione attiva inversa (JBE OFF, JBC ON)
modello di GummelGummel-Poon
modello equivalente
a collettore comune
VBC ,ON
− IE = βRIB
βR > 1 → IE > IB
βR : guadagno di corrente
inverso a collettore comune
• il BJT potrebbe essere usato come
amplificatore
• si preferisce la zona attiva diretta
poichè βF>>β
βR
• VBC, ON < VBE,ON (E più drogato di C)
Regione di interdizione (JBE OFF, JBC OFF)
modello di EbersEbers-Moll
IB ≅ 0
IC ≅ 0
IE ≅ 0
poiché tutte le correnti sono nulle il BJT si
comporta da circuito aperto tra C ed E
Regione di saturazione (JBE ON, JBC ON)
modello di Gummel
Gummel--Poon
• poiché le due giunzioni sono polarizzate
in
diretta,
esse
possono
essere
modellizzate
con
una
caduta
costante(VBE,SAT>VBE,ON,VBC,SAT>VBC,ON)
• a causa del diverso drogaggio di E e C le
VON
sono
leggermente
diverse
(VBE,SAT>VBC,SAT)
iC = β F iBE − (β R + 1)iBC
iB = iBE + iBC
•VCE,SAT=VBE,SAT - VBC,SAT >≈ 0 quindi il
BJT è approssimabile ad un cortocircuito tra C ed E
β F iB − iC = iBC (β F + β R + 1)
in sat. iBE ,iBC > 0 → β F iB > iC
•le correnti ai terminali sono determinate
dal circuito esterno: aumenti di IB non
risultano in aumenti di IC.
Regioni di funzionamento
Caratteristiche IV del BJT
caratteristica di uscita ad
emettitore comune
I C = f (V CE , I B )
IC
caratteristica di uscita a
base comune
I C = f (V CB , I E )
caratteristica di trasferimento
I C = f (V BE , V BC
C
E
)
IE
B
VCB
Caratteristiche IV di uscita a emettitore comune
I C = f (V CE , I B )
•iB = 0: BJT OFF
•vCE > vBE (vBC<0), iB >0 : regione attiva diretta, iC = βF iB (indipendente da vCE)
•vCE < vBE (vBC>0), iB >0 : saturazione (il valore limite vBE tra saturazione e
regione attiva aumenta leggermente all’aumentare di iB )
•vCE < 0 : i ruoli di collettore e emettitore si invertono
Caratteristiche IV di uscita a base comune
I C = f (V CB , I E )
• vCB > 0, iE >0: regione attiva diretta, iC ≈ iE è indipendente dalla tensione
• vCB < 0, iE >0: il diodo base collettore viene polarizzato direttamente e iC
cresce esponenzialmente (in direzione negativa) non appena il diodo basecollettore entra in conduzione (saturazione)
Caratteristica di trasferimento a emettitore comune
I C = f (V BE , V BC
)
Es:
I
C
(V BC
VVBE
T
= 0) = I
− 1
e
S
stessa forma dell’equazione di un
diodo.
transconduttanza
dI
g
m
=
C
I
= C
V
dV
BE Q
T
Effetti capacitivi
alle due giunzioni sono associati
effetti capacitivi così come per i diodi
Gli effetti capacitivi limitano:
• la velocità di commutazione ON-OFF in applicazioni digitali
• la risposta in frequenza negli amplificatori a BJT
BJT reali : resistenze serie
Problema: Con riferimento al circuito in
figura determinare il punto di lavoro del
bjt caratterizzato dai parametri IS = 10-16 A,
βF = 50, βR = 1.
Soluzione:
VBE =VBB= 10 V
VBC = VBB - VCC = 0.75 V-5.00V = -4.25 V
Utilizzando la rappresentazione di Gummel-Poon
I BE
V
10 −16 A
I S VBET
=
e
− 1 =
β F
50
10
0 .0259
e
= 10 150 A! !!!
−
1
10V
BJT reali : resistenze serie
C
• come nel diodo, è necessario tenere in
considerazione la resistenza delle regioni
neutre
• le correnti ai terminali devono attraversare
regioni di lunghezza non trascurabile per
arrivare nelle zone attive del dispositivo
RC
iC
iBC
B
RBB’
FiBE- RiBC
iB
iBE
RE
iE
E
BJT reali : effetto Early
In zona attiva al crescere di VCE lo spessore della SCR di JBC aumenta e lo
spessore della base diminuisce (modulazione dello spessore di base)
Le IV di uscita hanno una pendenza positiva
nella regione attiva diretta la IC (βF) non è
indipendente da VCE
V
CE
1 +
β ≈β
F
FO
V
A
Tensione di Early (VA=10÷150V): le IV di uscita sono estrapolate fino al
punto in cui IC è uguale a zero.
Modello SPICE per il BJT
Sintassi:
Q<name> < collector node> <base node> <emitter node>
+ [substrate node] <model name> [area value]
.MODEL <model name> NPN [model parameters]
.MODEL <model name> PNP [model parameters]
Esempio:
Q1 1 2 3 BC107 10
.MODEL BC107 NPN BF=30
BJT: modello in continua (Gummel-Poon)
I BE =
I BC
I CC
βF
VBE
IS NF⋅VT
e
=
− 1
BF
I CT = (I CC − I EC ) / Kqb
VBC
I EC
IS NR ⋅VT
=
=
e
− 1
β R BR
I GRE
VBE
NE
⋅VT
= ISE e
− 1
VBC
NC
⋅
V
I GRC = ISC e T − 1
NK
Kqb = Kq1 1 + (1 + 4 Kq 2 ) / 2
Kq1 = 1 / (1 − VBC / VAF - VBE / VAR )
[
]
Kq 2 = β F I BE / IKF + β RI BC / IKR
•RBB’, RC, RE: resistenze di accesso
• IGRE, IGRC : correnti dovute a
fenomeni di G-R nelle regioni
svuotate
• Kqb: parametro che tiene conto di
effetti reali tra cui l’effetto Early
BJT: modello in continua
BJT: modello per ampi segnali
I CT = (I CC − I EC ) / Kqb
Esempio
Problema: simulare le caratteristiche di uscita di un BJT npn (parametri IS =
10-16 A, βF = 50, βR = 1) nell’intervallo 0≤VCE≤15V, per 0 ≤ IB≤ 10µA.
caratteristiche di uscita bjt npn
1
IB 2 0 DC 0
VCE 1 0 DC 0
Q1 1 2 0 bjtmodel
.MODEL bjtmodel NPN BF=50 BR=1
+IS=1e-16
.DC VCE 0 15 0.1 IB 0 1e-5 1e-6
.PROBE IC(Q1)
.END
2
Q1
IB
0
VCE
Classificazione e datasheets
• general purpose
• small signal
• high voltage
• switching
• RF
Contenuti del corso
Introduzione e concetti fondamentali
Parte I: Dispositivi Elettronici
il diodo a giunzione
transistori ad effetto di campo (FETs)
il transistore bipolare (BJT)
struttura e funzionamento
analisi dei circuiti con BJTs
esempi di circuiti applicativi
Parte II: Circuiti amplificatori a transistors
amplificatori a BJT e FETs
Analisi in DC di circuiti con BJT
RC
risoluzione analitica
IC
VCC
RB
VBB
IB
V BB = R B I B + V BE
V = R I + V
CC
C C
CE
I C = f (V BE , V CE )
I B = g (V BE , V CE )
risoluzione grafica (nota IB)
risoluzione analitica
V CC = R C I C + V CE
I C = f (V BE , V CE )
Analisi in DC di circuiti con BJT
RC
risoluzione analitica
IC
VCC
RB
VBB
IB
V BB = R B I B + V BE
V = R I + V
CC
C C
CE
I C = f (V BE , V CE )
I B = g (V BE , V CE )
risoluzione approssimata
risoluzione analitica
V CC = R C I C + V CE
I C = f (V BE , V CE )
1. ipotesi su f, g (OFF, attiva diretta, attiva
inversa o saturazione)
2. si risolve il circuito e si determina Q
3. si verifica l’ipotesi 1
Analisi in DC di circuiti con BJT: Esempio
Problema: Calcolare il punto di lavoro di Q.
Dati noti: VBB= 3V, VCC=5V, RB=1MΩ, RC=1kΩ,
Q: (βF = 100, βR = 1, VBE,ON=0.7, VBC,ON=0.5, VCE,SAT=0.2V)
RC
IC
VCC
Soluzione: VCC e VBB tendono a pol. dir. JBE
VBB tende a pol. dir. JBC, VCC tende a pol. inv. JBC
Hp ZONA ATTIVA (VBE=VBE,ON=0.7V,
IB =
IC=βFIB)
3 − 0 .7
V BB − V BE
= 2 . 3 μA
=
10 3
RB
I C = β F I B = 230 μA
V BC = V BE − V CC + R C I C = − 4 . 53 V
I E = I B + I C = 232 . 3 μA
I B = 2 . 3 μA ≥ 0
Hp OK
V BC = − 4 . 53 V ≤ V BC ,ON = 0 . 5 V
RB
VBB
IB
Contenuti del corso
Introduzione e concetti fondamentali
Parte I: Dispositivi Elettronici
il diodo a giunzione
transistori ad effetto di campo (FETs)
il transistore bipolare (BJT)
struttura e funzionamento
analisi dei circuiti con BJTs
esempi di circuiti applicativi
Parte II: Circuiti amplificatori a transistors
amplificatori a BJT e FETs
Amplificatori a BJT
• amplificazione di segnali
• BJT non lineare
• funzionamento linerare in condizione di piccolo segnale
Il BJT come interruttore
• in interdizione il bjt si comporta come un
interruttore aperto tra C ed E
• in saturazione il bjt si comporta come un
interruttore chiuso tra C ed E
C
C
B
B
E
E
Il bjt si comporta come un interruttore controllato dalla corrente di
quale agisce come terminale di controllo
base, la
VDD
Q
in
out
in=‘0’
in=‘1’
Q OFF
Q SAT
out=‘1’
out=‘0’
invertitore RTL
A differenza dei FETs dove IG=0, nel caso del BJT è necessario spendere potenza
(IB≠0) per il controllo (maggiore potenza dissipata in applicazioni digitali).
Riferimenti di corrente a BJT
VCC
rete di
polarizzazione
RL
RB
VBB
RE
VEE
• in zona attiva la corrente sul carico RL è costante
• se VBB>0, VEE≥0
VCC > 0 (cond. necessaria)
• se RL ha bisogno del riferimento a massa (VCC=0)
VBB<0, VEE<0 (cond. necessaria)
• per evitare tensioni negative è possibile usare
riferimenti con PNP
il BJT come driver di corrente
•la max corrente erogabile dalla sorgente è VS/RS
•la corrente ILED è limitata da RS
• IB<<IC=ILED
I LED
VS − VLED
=
RS
VS deve erogare poca corrente
• la corrente ILED è fornita
da VCC e non da VS
I LED =
VCC − VLED − VCE
RC
• Q1 tipicamente si polarizza in saturazione:
la più bassa VCE consente di avere una più
bassa VCC (minore potenza dissipata)
la VCE non dipende da βF
il BJT come driver di corrente
Problema: dimensionare RB e RC in modo che
ILED=20mA, IS,max=0.5mA
DATI: VS=5V, RS=5kΩ, VCC=10V, VLED,ON=1.1V
Q1: (βF=100,VBE,SAT=0.8V, VCE,SAT=50mV)
Hp Q1: SAT, D ON
I LED
βF
< IB =
VS − VBE , SAT
I S ,max
VS − VBE , SAT
RB + RS
− RS ≤ RB <
≤ I S ,max
β F (VS − VBE , SAT )
3.4kΩ ≤ RB < 16.25kΩ
RC =
VCC − VLED ,ON − VCE , SAT
I LED
I LED
− RS
Es: RB=4.7 kΩ
= 442.5Ω
Hp OK
Contenuti del corso
Introduzione e concetti fondamentali
richiami di teoria dei circuiti
la simulazione circuitale con SPICE
elementi di Elettronica dello stato solido
Parte I: Dispositivi Elettronici
il diodo a giunzione
transistori ad effetto di campo (FETs)
il transistore bipolare (BJT)
Parte II: Circuiti amplificatori a transistors
generalità sugli amplificatori elettronici
modelli di piccolo segnale dei dispositivi elettronici
amplificatori a BJT e FETs:
analisi in DC
analisi in AC a medie frequenze
risposta in frequenza
Reti elettriche lineari
• è possibile caratterizzare il comportamento della rete utilizzando
l’analisi in regime sinusoidale (AC/fasoriale) o quella di Laplace
• è possibile definire un guadagno dato dal rapporto tra una variabile
di uscita (corrente o tensione) e una variabile di ingresso (corrente o
tensione)
tensione: AV=VO/VI
VO, VI, IO, II fasori o
trasformate di Laplace di
corrente: AI=IO/II
vO, vI, iO, iI
transresistenza: AR=VO/II
transconduttanza: AG=IO/VI
potenza AP=PL/PIN
PL: potenza fornita al carico
PIN: potenza fornita dalla sorgente
• la rete è un amplificatore (reale) se AP>1
• amplificatore ideale: AP=∞
• amplificatore di tensione: AV ind. da RI e RL
• amplificatore di corrente: AI ind. da RI e RL
• amplificatore di transresistenza: AR ind. da RI e RL
• amplificatore di transconduttanza: AG ind. da RI e RL
l’indipendenza del guadagno da RI e RL è limitato a ristretti
range di RI, RL, f.
Rappresentazione degli amplificatori
gli amplificatori sono spesso schematizzati usando modelli a doppi bipoli
(due porte) unidirezionali
Amplificatore di tensione
VO
RIN
RL
=
=
A
G
V
V V
RIN + RI RL + RO
I
2
A = PL = G 2 RIN RL
V
R +R
P P
R
IN
L L
O
amplificatore di tensione (reale) AV ≈ GV
RIN >> RI
R
RO << RL →
AP ≈ GV2 IN
RL
amplificatore di tensione ideale
RIN=∞, RO=0
AV = GV
AP = ∞
un “amplificatore di tensione ideale”
è un “amplificatore ideale”
Amplificatore di transconduttanza
IO
RIN
RO
AG = V = GG R + R R + R
I
IN
I
L
O
2
A = PL = G 2 R R RO
G IN L
P P
+
R
R
IN
O
L
amplificatore di
transconduttanza ideale
RIN=∞, RO= ∞
amplificatore di
transconduttanza (reale) A ≈ G
G
G
RIN >> RI
RO >> RL →
2
AP ≈ GG RIN RL
AG = GG
AP = ∞
un “amplificatore di transconduttanza
ideale” è un “amplificatore ideale”
Amplificatore di corrente
IO
RO
RI
A
G
=
=
I
I I
RIN + RI RL + RO
I
2
A = PL = G 2 RL RO
I
R +R
P P
R
IN
IN
O
L
amplificatore di
corrente (reale)
amplificatore di corrente ideale
RIN=0, RO= ∞
RIN << RI
AI ≈ GI
RO >> RL →
2 RL
A
≈
G
I
P
RIN
AI = GI
AP = ∞
un “amplificatore di corrente ideale”
è un “amplificatore ideale”
Amplificatore di transresistenza
VO
RI
RL
AR = I = GR R + R R + R
L
O
I
IN
I
2
2
A = PL = GR RL
R +R
P P
R
R
IN
IN
L
O
L
amplificatore di
transresistenza ideale
RIN=0, RO= 0
amplificatore di
transresistenza (reale)
RIN << RI
AR ≈ GR
RO << RL →
GR2
AP ≈ R R
IN L
AR = GR
AP = ∞
un “amplificatore di transresistenza
ideale” è un “amplificatore ideale”
Analisi degli amplificatori
• tensioni (correnti) di ingresso (uscita) sono costituite
da una componente continua (DC) e una variabile;
l’informazione da amplificare è contenuta nella
componente variabile
• la rete deve funzionare in modo lineare; i componenti
attivi (transistors, opamp) sono componenti non-lineari
• se la componente variabile del segnale di ingresso è
un “piccolo segnale” la rete si comporta in modo
lineare
• in tale situazione è possibile usare il principio di
sovrapposizione e separare l’analisi in due step
DC (punto di lavoro)
piccolo segnale (AC o Laplace)
Modello di piccolo segnale
• il modello di un componente si ottiene
approssimando al primo ordine la curva
caratteristica
• l’approssimazione di “piccolo segnale”
dipende dal dispositivo
• il modello è composto da componenti
lineari (R, C, generatori controllati) i cui
valori sono funzione del Q-point.
•sostituendo alla rete non lineare il
modello, si ottiene una rete linearizzata
per le variazioni
• è possibile definire i guadagni AV, AI,
AR, AG per la variazioni
Limiti di funzionamento lineare
Il funzionamento lineare degli amplificatori è limitato, tra l’altro, da
• caratteristiche non lineari dei componenti attivi (distorsione)
• tensione di alimentazione (saturazione)
Es: vI(t)=VI+vi(t)=VI+VIMsin(2πft)
affinchè vi(t) sia amplificato linearmente è è
necessario che
• vO=f(vI) sia lineare in un intorno di VI
• vI(t) piccolo segnale
in tale situazione
vO(t)=VO+vo(t) =VO+VOMsin(2πft)
Es:
VI=0.5V, VIM=100mV VO=10V, VOM=4V
VI=0.3V, VIM=50mV VO=4V, VOM=1V
Limiti di funzionamento lineare: distorsione
Es: VI=0.4V :
VI è tale che il
guadagno è diverso per valori positivi e
negativi di vi(t) distorsione
Es: VI=0.5V, VIM=150mV: VIM è tale che
il guadagno cambia nella semionda negativa
(distorsione)
Es: VI=0.65V, VIM=50mV: VI e VIM sono
tali che il guadagno si annulla (saturazione)
Limiti di funzionamento lineare: distorsione
•in caso di distorsione, l’uscita non è una sinusoide
•il segnale in uscita può essere quindi sviluppato in serie di Fourier
v(t) =VO +V1(sinωot +φ1) +V2 (sin 2ωot +φ2 ) +V3(sin3ωot +φ3) +...
dc
segnale
desiderato
distorsione di
seconda
armonica
distorsione di
terza armonica
distorsione armonica totale
∞
THD =100% ×
2
V
∑ i
i=2
V1
numeratore = combinazione in RMS dei termini relativi alla distorsione
denominatore = componente desiderata
Polarizzazione
scopo della polarizzazione è quello
di cambiare la componente DC di
ingresso (VI) in modo tale da
• far lavorare l’amplificatore in
condizioni di linearità
• fissare le proprietà di piccolo
segnale (es. guadagno)
Il BJT come amplificatore
VCC
RC
vOUT
RI
ib(t)
vI
• le variazioni vI(t) determinano variazioni di iB(t), di iC(t) e quindi di vOUT(t)
•se Q è in zona attiva e vi(t) è un piccolo segnale vout(t) è una sinusoide e il circuito
funziona in modo lineare
Il MOSFET come amplificatore
VDD
RD
vOUT
RI
vI
• le variazioni vI(t) determinano variazioni di vGS(t), di iD(t) e quindi di vOUT(t)
•se Q è in saturazione e vi(t) è un piccolo segnale vout(t) è una sinusoide e il circuito
funziona in modo lineare
Contenuti del corso
Introduzione e concetti fondamentali
richiami di teoria dei circuiti
la simulazione circuitale con SPICE
elementi di Elettronica dello stato solido
Parte I: Dispositivi Elettronici
il diodo a giunzione
transistori ad effetto di campo (FETs)
il transistore bipolare (BJT)
Parte II: Circuiti amplificatori a transistors
generalità sugli amplificatori elettronici
modelli di piccolo segnale dei dispositivi elettronici
amplificatori a BJT e FETs:
analisi in DC
analisi in AC a medie frequenze
risposta in frequenza
Modello di piccolo segnale del diodo
per variazioni vd sufficientemente piccole la
relazione iD(vD) è approssimabile alla retta tangente
nell’intorno del punto di riposo Q( ID,VD)
iD (vD ) ≈ I D +
gd =
iD (vD ) = I S e
vD
VT
− 1
∂iD
∂vD
=
Q
∂iD
∂vD
(vD − VD )
Q
ID + IS
VT
conduttanza
differenziale
id (vd ) ≈ g d vd
• rd=1/gd : resistenza differenziale
• è necessario aggiungere gli effetti
capacitivi inclusi nel modello per ampi
segnali (non inclusi nel modello DC)
•in pol. dir. gd≈ID/VT
• in pol. inv. gd≈0
• pol. nulla gd=IS/VT ≠ 0
Modello di piccolo segnale del diodo
sviluppando in serie di Taylor nell’intorno del punto di lavoro (ID, VD)
1 ∂ i iD
iD (vD ) ≈ ∑
i
i = 0 i! ∂v D
∞
(vD − VD )
i
Q
∂ i iD
∂vDi
=
Q
∞
1 ∂ i iD i
1 vd
id (vd ) ≈ ∑
v
=
(
I
+
I
)
d
D
S ∑
i
i =1 i! ∂v D Q
i =1 i! VT
∞
ID + IS
VTi
i
2
v
v
1
1v
= (I D + I S ) d + d + d
VT 2 VT 6 VT
3
+ ...
•la serie può convergere solo se vd<VT
•sotto tale condizione i termini della serie contano sempre meno
all’aumentare di i
• la condizione di piccolo segnale è valida quando conta solo il termine
i=1 ovvero per
2
vd
1v
>> d → vd << 2VT ≈ 50mV vd <≈ 5mV (vd < VT OK)
VT
2 VT
Modello di piccolo segnale del BJT
il modello a piccoli segnali si basa sulla rappresentazione a doppio bipolo
ib = gπ vbe + g r vce
rπ = 1 / gπ resistenza differenziale di ingresso
ic = g m vbe + g o vce
rO = 1 / g O resistenza diffenziale di uscita
gr =
gm =
ib
v ce
=
v
be
=0
ic
v be
=
v
ce
=0
∂iB
∂ v CE
g0 =
Q − po int
∂ iC
∂ v BE
gπ =
Q − po int
ic
v ce
=
v
be
=0
ib
v be
=
v
ce
=0
∂ iC
∂ v CE
Q − po int
∂iB
∂ v BE
Q − po int
Modello di piccolo segnale del BJT
modello di GummelGummel-Poon
in zona attiva
iB
g0 =
iC
B
gr =
∂iB
∂ v CE
=0
Q − po int
∂ iC
∂ v CE
gm =
=
Q − po int
IC
V A + V CE
gπ =
∂ iC
∂ v BE
=
Q − po int
∂iB
∂ v BE
=
Q − po int
IC
β F VT
IC
VT
g
= m
βF
C
in realtà βF0 dipende da IC
FiB
E
iE
vCE
β F = β FO 1 +
V
A
v BE
I S VT
e
iB ≈
β
FO
v BE
v
iC ≈ I S 1 + CE e VT
VA
gπ =
∂iB
∂ v BE
=
Q − po int
IC
β 0VT
βO =
βF
1 ∂β F 0
1 − I C
β
∂
i
F 0 C Q − po int
• βo : guadagno di corrente per piccoli segnali a
emettitore comune del BJT
• assumeremo βF0 ind. da IC
βo ≈ βF
Modello di piccolo segnale del BJT
gmvbe = gmibrπ = βoib
gm =
rπ =
IC
VT
β OVT
rO =
IC
transconduttanza:
aumenta con IC
=
βO
gm
VA + VCE VA
≈
IC
IC
µ f = g m rO =
res. diff. ingresso
res. diff. uscita
VA + VCE VA
guadagno di
≈
VT
VT tensione intrinseco
• poco dip. da Q
• guadagno max degli ampl. a bjt (1000÷4000)
•il modello va completato con la CBE e CBC
(rilevanti ad alta f)
• modello a bassa f completamente definito
da 2 parametri (βF, VA)
• i parametri non dipendono dalla
geometria: transistor piccoli per high-f
hanno lo stesso gm di transistor grandi per
alte IC
• modello del PNP identico all’NPN
Modello di piccolo segnale del BJT
iC (vBE ) ≈ I S e
v BE
VT
sviluppando in serie di Taylor
nell’intorno del punto di lavoro (IC, VBE)
La condizione di linearità richiede che ic
sia proporzionale a vbe
ic
IC
≈
gm
IC
vbe =
vbe
VT
2
3
v
v
v
+ 1 be + 1 be + ...
ic = I
V 2 VT 6 VT
be
C
T
vbe << 2VT → vbe ≤ 5mV
•si possono avere variazioni significative in
uscita (fino a 20%) in condizioni di linearità
≤
5mV
≈ 0.2 •valori maggiori in uscita possono essere
25.9mV
ottenuti ammettendo
ampiezza/distorsione
un
compromesso
Modello di piccolo segnale del MOSFET
id
modello DC (saturazione)
+
ig
+
I G = 0
Kn
2
(
)
(1 + λVDS )
V
V
I
=
−
GS
TN
D
2
vds
vgs
-
-
modello AC (saturazione)
ig = gπ v gs + g r vds
id = g m v gs + g o vds
ig = 0
id = g m v gs + g o vds
gπ =
gr =
gm =
go =
∂iG
∂vGS
∂iG
∂vDS
∂iD
∂vGS
∂iD
∂vDS
=0
Q - point
=0
Q - point
= K n (VGS − VTN )(1 + λVDS ) =
Q - point
=λ
Q - point
2I D
VGS − VTN
Kn
(VGS − VTN )2 = λI D = 1 I D
2
1 + λVDS
+ VDS
λ
Modello di piccolo segnale del MOSFET
• resistenza di ingresso infinita
• il modello va completato con la
CGS e CGD (rilevanti ad alta f)
• modello a bassa f completamente
definito da 2 parametri (KN, λ)
• i parametri dipendono dalla
geometria attraverso il fattore KN
ID
gm =
= transconduttanza
(VGS − VTN ) / 2
= 2 K n I D (1 + λVDS ) ≈ 2 K n I D
rO =
1 + λVDS
1
≈
resistenza diff. di uscita
λI D
λI D
2K n
µ f = gmro ≅ 1
λ ID
guadagno di
tensione intrinseco
(diminuisce con ID)
• modello del PMOS uguale a
quello dell’NMOS
Modello di piccolo segnale del MOSFET
Kn
Kn
2
(vGS − VT ) = (VGS − VT + vgs )2
iD (vGS ) =
2
2
Kn
id =
2(VGS − VT )v gs + v gs2
2
2(VGS − VT )v gs >> v gs2 → v gs ≤ 0.2(VGS − VT )
[
]
condizione di
piccolo segnale
dato che il MOSFET può essere polarizzato con (VGS - VTN)
di alcuni volt, può avere valori di vgs molto maggiori rispetto
ai corrispondenti valori di vbe per il BJT
0.2(VGS −VTN )
= vgs ≤
= 0.4
V
−
V
ID ID
GS
TN
2
id
gm
•si possono avere variazioni significative in
uscita (fino a 40%) in condizioni di linearità
•valori maggiori in uscita possono essere
ottenuti ammettendo un compromesso
ampiezza/distorsione
confronto dei modelli di BJT e MOSFET
•gm molto più alto nei BJT
(VGS-VTN)/2>>VT
• µf molto più alto nei BJT (diminuisce con
ID nei MOSFET)
• rπ infinito nei MOSFET
(diminuisce con IC nei BJT)
• vin,MAX più alto nei MOSFET
• paragonabili valori di rO
• parametri ind. dalla geometria nei BJT
• guadagno di corrente infinito nei MOSFET
confronto dei modelli di BJT e MOSFET
βF=100,
VA=75V
VCE=10V
prestazioni confrontabili a basse correnti <1µA
Contenuti del corso
Introduzione e concetti fondamentali
richiami di teoria dei circuiti
la simulazione circuitale con SPICE
elementi di Elettronica dello stato solido
Parte I: Dispositivi Elettronici
il diodo a giunzione
transistori ad effetto di campo (FETs)
il transistore bipolare (BJT)
Parte II: Circuiti amplificatori a transistors
generalità sugli amplificatori elettronici
modelli di piccolo segnale dei dispositivi elettronici
amplificatori a BJT e FETs:
analisi in DC
analisi in AC a medie frequenze
risposta in frequenza
Configurazioni amplificatrici fondamentali
in zona attiva
iC ≈ I S e
iB =
iE ≈
iC
βF
IS
αF
D
ID
G
v BE
VT
≈
e
IS
βF
v BE
VT
e
v BE
VT
Applicazione del segnale:
le correnti
cambiano
significativamente al variare di vBE (vGS) ovvero dei potenziali
di B (G) e E (S), quindi B (G) e E (S) sono utili come terminali
di ingresso. Il C (D) genera modeste variazioni delle correnti
attraverso l’effetto Early (modulazione di lunghezza di canale)
per cui non è utilizzato come terminale di ingresso.
Prelievo del segnale: variazioni sostanziali nelle correnti di E
(S) o C (D) creano un ampio segnale di tensione sui resistori di E
(S) o C (D) e quindi il C (D) o l’E (S) possono essere utilizzati
per prelevare i segnali di uscita. Dato che iB è di un fattore βF più
piccola di iC o iE (iG=0) , il terminale di base (gate) non viene
utilizzato come terminale di uscita.
IS
S
in saturazione
K
2
iD = iS = n v −V
TN
2 GS
tre famiglie fondamentali di amplificatori
– ingresso B (G) – uscita C (D): Emettitore (Source) comune CE (CS)
– ingresso E (S) – uscita C(D): Base (Gate) comune CB (CG)
– ingresso B (G) - uscita E(S): Collettore (Drain) comune CC (CD)
Configurazioni amplificatrici fondamentali
generica rete di
polarizzazione
il punto di lavoro è influenzato da
• componente continua sorgente (VI)
• resistenza sorgente (RI)
• resistenza carico (RL)
indipendenza del punto di lavoro (BJT o FET)
generica rete di
polarizzazione
•in DC le capacità (di accoppiamento) sono circuiti aperti e il punto di lavoro non è
influenzato da sorgente e carico
• il prezzo da pagare è una riduzione del guadagno alle basse frequenze ( in DC vO=0)
• in condizione di piccolo segnale è possibile separare l’analisi DC dall’analisi AC
Step 1- Analisi in DC
le capacità di accoppiamento sono circuiti aperti
la rete di pol. si studia utilizzando il modello DC del transistor
Step 2- Analisi in AC
le
componenti
continue
corrispondono a variazioni nulle:
i generatori di tensione costante
indipendenti vanno sostituiti con
corto-circuiti
i generatori di corrente costante
indipendenti vanno sostituiti con
circuiti aperti
la rete si studia sostituendo al
transistor il modello di piccolo
segnale
studieremo inizialmente gli amplificatori nel range delle “medie frequenze” in cui le
capacità di accoppiamento sono approssimativamente corto-circuiti, mentre le capacità del
transistor sono circuiti aperti. In questo range tutti i parametri dell’amplificatore (guadagni,
resistenze di ingresso e uscita) sono indipendenti da f.
Contenuti del corso
Introduzione e concetti fondamentali
richiami di teoria dei circuiti
la simulazione circuitale con SPICE
elementi di Elettronica dello stato solido
Parte I: Dispositivi Elettronici
il diodo a giunzione
transistori ad effetto di campo (FETs)
il transistore bipolare (BJT)
Parte II: Circuiti amplificatori a transistors
generalità sugli amplificatori elettronici
modelli di piccolo segnale dei dispositivi elettronici
amplificatori a BJT e FETs:
analisi in DC
analisi in AC a medie frequenze
risposta in frequenza
Rete di polarizzazione (BJT o FET)
generica rete di
polarizzazione
VCC
RC
RB
RE
VBB
•se si hanno tutti i valori di alimentazione DC
disponibili, una delle 3 batterie non è
necessaria (es. VEE=0)
•se (con VEE=0) i valori di VBB e/o VCC
necessari sono troppo alti rispetto a quelli
disponibili, è necessario usare una VEE<0
Rete di polarizzazione (BJT o FET)
prelievo del segnale
di uscita (C o E)
applicazione del segnale
di ingresso (B o E)
RC
VCC
vOUT
RI
vI
RB
RE
vOUT
VBB
• RB strettamente necessaria (≠0) se
l’ingresso è applicato sulla base
• RC strettamente necessaria (≠0) se
l’uscita è presa sul collettore
•RE strettamente necessaria (≠0) se
l’ingresso è applicato sull’emettitore
•RE strettamente necessaria (≠0) se
l’uscita è presa sull’emettitore
MOSFET: stabilizzazione del punto di lavoro
VGG = VGS + RS I D
KN 2
I
=
VGO
D
2
(VGO = VGS − VTN )
VGG
VDD
RD
RG
+
VGS RS
M1
ID
VGG >> VGS
V
→ I D ≈ GG ind. da M1
se oppure
RS
R >> V / I
GS
D
S
• l’indipendenza da M1 implica la
stabilizzazione del Q
• il prezzo da pagare è l’aumento di
VDD e VGG e quindi della potenza di
alimentazione necessaria
K NVGO
∂I D
=
−
∂V
1 + K N RSVGO
TN
2
V
∂
I
GO
D =
∂K N 2(1 + K N RSVGO )
all’aumentare di RS si riduce la dipenza
di ID dai parametri: se ID aumenta, VS
aumenta, VGS diminuisce, contrastando
l’aumento di ID
MOSFET: stabilizzazione del punto di lavoro
• consente di risparmiare una sorgente di alimentazione (VGG)
al prezzo di una maggiore dissipazione di potenza complessiva
•VGG può essere ottenuta con una
opportuna scelta di R1 e R2
VGG = VDD
R1
R1 + R2
• un grado di libertà (il parallelo RGG è irrilevante poichè
IG=0). Per minimizzare la potenza dissipata da VDD la somma
R1+R2 deve essere massimizzata.
MOSFET: esempio di progetto della rete DC
Problema: progettare la rete di polarizzazione R1, R2, RD, RS
DATI: RD=15kΩ, VDD=10V, PDD,max=2.5mW, Q:(ID=200µA, VDS=5V, VGS=3V).
I2
R2
VDD
RD
ID
D
G
M1
I2
VDD − VDS
= 25kΩ → RS = 10kΩ
ID
VG = VGS + RS I D = 5V = VDD
RS
R1
→ R1 = R2
R1 + R2
PDD = VDD (I D + I 2 )
PDD ≤ PDD ,max → I 2 ≤
S
R1
RS + RD =
I2 =
PDD ,max
VDD
− I D = 50μA
VDD
→ R1 + R2 ≥ 200kΩ
R1 + R2
scegliamo R1 = R2 = 100kΩ
BJT: stabilizzazione del punto di lavoro
in zona attiva I E ≈ I C
VBB ≈ RB I B + VBE ,ON + RE I C
VBB >> RB I B + VBE ,ON
V
se
oppure
→ I C ≈ BB ind. da Q1
RE
R >> (R I + V
)
/
I
B B
BE ,ON
C
E
• l’indipendenza da Q1 implica la stabilizzazione
del punto di lavoro
• il prezzo da pagare è l’aumento di VCC e VBB e
quindi della potenza di alimentazione necessaria
VBB = RB I B + VBE ,ON + RE (1 + β F )I B
∂I C
I C (1 + RE / RB )
→
=
∂β F β F [1 + RE / RB (1 + β F )]
I C = β F I B
all’aumentare di RE si riduce la dipenza di IC dai parametri: se IC
aumenta, VE aumenta, IB diminuisce, contrastando l’aumento di IC
BJT: stabilizzazione del punto di lavoro
IC
RC
RB
C
B
VBB
Q1
VCC
E
IB
IE
RE
VBB = VCC
R1
R1 + R2
RB = R1 // R2
• consente di risparmiare una sorgente di alimentazione (VBB)
• la condizione VBB>>RBIB equivale a VB≈VBB ovvero I2>>IB e I1≈I2 e si realizza
imponendo VCC/(R1+R2)>>IB , es: VCC/(R1+R2)=10IB
BJT: esempio di progetto della rete DC
Problema: progettare la rete di polarizzazione R1, R2, RC, RE
DATI: RC=6.67kΩ, VCC=15V, Q:(IC=750µA, IB=7.5µA, VCE=5V,VBE=0.7V)
−V
− R I = 5V
CC
CE
C C
V
R = E = 6 . 60 k Ω
E
I
E
V
V
CC
= 10 I → R + R = CC = 200 k Ω
B
1
2 10 I
R +R
B
1
2
R
1
V =V +V
= 5 .7 V ≈ V
= 10 I R
B
E
BE
CC R + R
B 1
1
2
V
B = 110 k Ω → R = 90 k Ω
R =
1 10 I
2
B
V
E
=V
Reti di polarizzazione
tutte le famiglie utilizzano
polarizzazione a quattro resistori
tipicamente
la
rete
di
Contenuti del corso
Introduzione e concetti fondamentali
richiami di teoria dei circuiti
la simulazione circuitale con SPICE
elementi di Elettronica dello stato solido
Parte I: Dispositivi Elettronici
il diodo a giunzione
transistori ad effetto di campo (FETs)
il transistore bipolare (BJT)
Parte II: Circuiti amplificatori a transistors
generalità sugli amplificatori elettronici
modelli di piccolo segnale dei dispositivi elettronici
amplificatori a BJT e FETs:
analisi in DC
analisi in AC a medie frequenze
risposta in frequenza
Analisi in AC di amplificatori a BJT e FET
• le configurazioni amplificatrici di BJT e FETs sono topologicamente identiche
• le differenze nelle proprietà dinamiche di amplificatori a BJT e FET stanno nelle differenze
nei modelli di piccolo segnale di BJT e FET
BJT
FET
• BJT e FET hanno modelli di piccolo segnale topologicamente simili. Il modello topologico del
FET si può ricavare da quello del BJT facendo tendere rπ ∞ e β0 ∞
• le espressioni matematiche relative alle variabili di piccolo segnale degli amplificatori a FET
possono essere ricavate da quelle degli amplificatori a BJT facendo tendere rπ ∞ e β0 ∞
Resistenze e guadagni ai terminali
• RiB, RiC, RiE : resistenze di ingresso ai terminali
• è possibile definire i guadagni ai terminali:
tensione(corrente) terminale di uscita / tensione(corrente) terminale di ingresso
• resistenze e guadagni ai terminali dipendono da resistenze di sorgente e carico
ingresso sulla Base (Gate)
v b = ib rπ + R E (ib + i c )
R E (ib + i c ) = − (i c − β o ib )rO − i c R C
v b = ib (rπ + R E ) + R E i c
(β 0 ro − R E )ib = (ro + R C + R E )i c
r0 >> R C + R E
se
β 0 >> 1
v b = ib rπ + R E i c
→
β 0 ib = i c
~β0RE
R iB
vb
=
= rπ + β o R E = rπ (1 + g m R E )
ib
1
r
v
= π = be
1 + g m RE
R iB
vb
• RE determina un aumento della RiB a spese
dei guadagni ai terminali rispetto a vb
• valori relativamente elevati di RiB buon
accoppiamento con sorgenti di tensione
ingresso sulla Base (Gate)
r0 >> R C + R E
se
β 0 >> 1
v b = ib rπ + R E i c
→
β 0 ib = ic
• i guadagni di tensione diminuiscono
con RE
~β0RE
R iB = rπ + β o R E = rπ (1 + g m R E )
AV , cb
≈
g m R E >> 1
vc
R C ic
g m RC
=
=−
=−
vb
vb
1 + g m RE
AV , eb =
ve
R i
g m RE
= E e =
vb
vb
1 + g m RE
≈
β o RE
RC
≈ −
g m R E >> 1
RE
g m R E >> 1
• per gmRE<≈1 i guadagni AV dip.
fortemente da gm e sono maggiori per
gli amplificatori a BJT
• se gmRE>>1 i guadagni AV sono ind.
dal transistor (stabilizzazione dinamica)
• l’uscita di C è invertente e può fornire
guadagno di tensione >1
1
• l’uscita di E è non-invertente e
fornisce guadagno di tensione unitario
(inseguitore o buffer di tensione)
ingresso sulla Base (Gate)
r0 >> R C + R E
se
β 0 >> 1
v b = ib rπ + R E i c
→
β 0 ib = i c
~β0RE
AG , cb =
AG , eb =
ic
gm
=
vb 1 + g m R E
≈
g m R E >> 1
ie
i
gm
≈ c =
vb
vb 1 + g m R E
A I , cb
i
= c = β0
ib
A I , eb
i
i
= e ≈ c = β0
ib
ib
1
RE
≈
g m R E >> 1
A R , cb =
A R , eb
• i guadagni AG diminuiscono con RE
1
RE
vc
= − β 0 RC
ib
ve
=
= β 0 RE
ib
• per gmRE<≈1 i guadagni AG dip.
fortemente da gm e sono maggiori per
gli amplificatori a BJT
• se gmRE>>1 i guadagni AG sono ind.
dal transistor
•guadagni AI e AR ∞ per i FET; soggetti
a dispersione (β0) nei BJT
ingresso sull’Emettitore (Source)
ib
B
v e = − ib (rπ + R B ) = − ib rπ*
v e = − (i c − β o ib )rO − i c R C =
= − i c (rO + R C ) + β o rO ib
ic
C
Oib
r
rO
E
RB
se rO >> R C
*
r
v e = − ib rπ
⇒ i c = ib β 0 + π
rO
v e = rO (β o ib − i c )
ve
ie
R iE
RC
RiE
*
ve
ve
rπ*
*
=−
=−
= rπ // ro //
β0
ie
ib + ic
≈ ro //
β 0 >> 1
A I , ce
rπ*
β0
≈
rπ >> R B
ro //
i
= c = ≈ 1
β 0 >> 1
ie
A R , ce =
vc
ie
≈ − RC
β 0 >> 1
1
gm
≈
g m ro >> 1
1
gm
• valori relativamente bassi di
RiE buon
accoppiamento
con
sorgenti di corrente
• guadagno di corrente unitario
(inseguitore o buffer di corrente)
• guadagno di transresistenza ind. dai
parametri
ingresso sull’Emettitore (Source)
ib
C
B
ic
Oib
r
E
RB
RiE
ie
AG , ce
AV , ce
v e = − ib rπ*
se rO >> R C →
v e = rO (β o ib − i c )
rO
RC
ve
R iE
1
i
β
= c = − + *0
ve
rπ
ro
1
≈ − + g m ≈ − g m
rπ >> R B
ro
g m r o >> 1
1
v
− R C ic
β
= c =
= R C + *0
ve
ve
rπ
ro
≈
rπ >> R B
ve
rπ*
*
=−
= rπ // ro //
ie
β0
• RB determina un aumento della RiE a spese
dei guadagni rispetto a ve
1
R C + g m ≈ g m R C
ro
g m r o >> 1
• guadagni AG e AV relativamente elevati
(maggiori nei BJT a causa del maggiore gm)
Resistenza al terminale di Collettore (Drain)
− i b (rπ + R B ) = R E (ib + i x )
R E (i b + i x ) = − (i x − β o ib )rO + v x
(
)
− i b rπ* + R E = R E i x
ib (R E − β o rO ) = − i x (ro + R E ) + v x
rO >> R E
− ib rπ* + R E = R E i x
se
→
− ib β o rO = − i x ro + v x
β >> 1
0
(
R iC
)
≈ rO (1 + g m R E )
)] = rπ ≈>> R E r β = R
iC , max
rπ << R E O 0
•RiC relativamente alta
vx
R E // rπ*
≈ rO [1 + g m (R E // rπ
=
= rO 1 + β 0
*
ix
rπ
rπ >> R B
•la presenza di RE determina un aumento di RiC
Accoppiamento ingresso/uscita e guadagno intrinseco
G V = AV
G I = AI
RI → 0
RL → ∞
RI → ∞
RL → 0
G G = AG
RI → 0
RL → 0
G R = AR
RI → ∞
RL → ∞
Fattore di accoppiamento di ingresso
ingresso sulla Base (Gate)
R in , B = R B // R iB
R B ,T = R i // R B // R iB
α V ,B
R B ,T
vb
=
=
<1
vi
RI
ingresso sull’Emettitore (Source)
R in , E = R E // R iE
R E ,T = R i // R E // R iE
α V ,E
R E ,T
ve
=
=
<1
vi
RI
• per massimizzare l’accoppiamento da una
sorgente di tensione (vi) è necessario che
Rin,B (Rin,E) >> RI (influenza sull’OP)
•per massimizzare l’accoppiamento da una
sorgente di corrente (ii) è necessario che
Rin,B (Rin,E) << RI
Amplificatore CE (CS) – RIN e RO
R in = R in , B = R B // R iB ≈ R B // [rπ (1 + g m R E )]
• gmRE>>1
Rin≈RB
• per i FET Rin=RB
ic
Rin,B
in B
RiC
RO
vc
RiB i
b
vb
vo
RC
io
RL
R*C
RI
vi
RB
RE
R O = R C // R iC ≈ R C // [rO (1 + g m R E )] ≈ R C
Amplificatore CE (CS) – AV e AG
AV =
≈−
vo
v v
= b c = α V , B AV , CB R C = R C*
vi
vi vb
(
R B ,T
RI
)
g m R C*
1 + g m RE
AV diminuisce all’aumentare
di RE e aumenta con R*C
AV < g m R C << g m ro = µ f
ro >> R C
G V = AV
RI → 0
RL → ∞
g m RC
=−
= AV , CB
1 + g m RE
RC
≈ −
g m R E >> 1
RE
R B ,T
io
vo
AV
gm
RC
AG =
=
=
≈−
vi
R L vi
RL
R I 1 + g m R E RC + R L
G G = AG
RI → 0
RL → 0
=−
gm
= AG , CB
1 + g m RE
≈
g m R E >> 1
−
1
RE
Amplificatore CE (CS) – AI e AR
AI =
io
i
gm
RC
= o R I = A G R I ≈ − R B ,T
ii
vi
1 + g m R E RC + R L
G I = AI
RI → ∞
RL → 0
= − R IN
gm
1 + g m RE
≈
g m R E >> 1
−
R IN
RE
vo
io R L
g m R C*
AR =
=
= A I R L ≈ − R B ,T
ii
ii
1 + g m RE
G R = AR
RI → ∞
RL → ∞
≈ − R IN
g m RC
1 + g m RE
≈
g m R E >> 1
− R IN
RC
RE
Amplificatore CE (CS)
CE: capacità di by-pass
resistenza di emettitore statica: RE=RE1+RE2
resistenza di emettitore dinamica: RE=RE2
•RE2 stabilizza (e riduce) il guadagno
•RE1+RE2 stabilizza il punto di lavoro
• CE introduce un grado di libertà nel progetto DC/AC
Amplificatore CE (CS)
V RC
1 / 3V DD
−1
g
R
=
≈
≈
10
V
V
m C
DD
VT
VT
=
V RD
1 / 3V DD
g m RD =
≈
≈ V DD V −1
(V GS − V TN ) / 2 (V GS − V TN ) / 2
(
AV
max
)
(
BJT
)
FET
• la caduta su RC (RD) è una frazione di VDD, tipicamente 1/3
• per aumentare il guadagno è necessario aumentare la VDD e quindi la
potenza di alimentazione necessaria
• a parità di VDD il guadagno massimo di un amplificatore CE è molto
maggiore di quello di un amplificatore CS
Dinamica di ingresso dell’amplificatore CE (CS)
condizione di piccolo segnale
v be ≤ v be . max
v be = ib rπ = v b
v b = v be
vi ≤
rπ
R iB
R iB
R
≤ v be . max iB ≈ v be . max (1 + g m R E )
rπ
rπ
R in , B + R I
R in , B
v be . max (1 + g m R E )
v b ≤ 5 mV (1 + g m R E )
v g ≤ 0 . 2 (V GS − V TN )(1 + g m R S )
aumentando RE aumenta la massima
ampiezza delle variazioni in ingresso
tale da garantire da linearità
BJT
FET
Dinamica di uscita dell’amplificatore CE (CS)
v I (t ) = V I + V I , M sin (ω t )
v CE (t ) = V CE − V M sin (ω t )
AV = −V M / V I , M
l’ampiezza massima di VI,M deve essere tale da
mantenere il BJT (FET) in zona attiva diretta
(saturazione)
BJT
v CE ( t ) = V CE − V M sin (ω t ) ≥ V BE , ON − V BC , ON
V M ≤ V CE − V BE , ON + V BC , ON
v BC ( t ) ≤ V BC , ON
→
→
iB (t ) ≥ 0
v RC ( t ) = I C R C + V M sin (ω t ) ≥ 0
V M ≤ I C RC
V M < min {I C R C , (V CE − V BE , ON + V BC , ON
)}
FET
v DS ( t ) ≥ v GS ( t ) − V TN ≈ V GS − V TN
v ( t ) = V DS − V M sin (ω t ) ≥ V GS − V TN
V ≤ V DS − (V GS − V TN
→ DS
→ M
v GS ( t ) ≥ V TN
VM ≤ I D RD
v RD ( t ) = I D R D + V M sin (ω t ) ≥ 0
V M < min {I D R D , V DS − (V GS − V TN
)
)}
Amplificatori CE e CS
g m R C*
−
1 + g m RE2
− 10
V
CC
R B || rπ (1 + g m R E 2 )
R C || r0 (1 + g m R E 2 )
5 mV (1 + g m R E 2 )
g m R D*
−
1 + g m RS 2
− V
DD
RG
R D || r0 (1 + g m R S 2 )
0 . 2 (V GS − V TN )(1 + g m R S 2 )
Amplificatore CC (CD) – RIN e RO
[
(
R in = R in , B = R B // R iB R E = R E*
• gmR*E>>1
)] ≈ R // [r (1 + g
π
B
)]
*
R
m
E
Rin≈RB
RC
• per i FET Rin=RB
Rin,B
RiB i
b
vb
RI
RB
R O = R in , E = R E // R iE
≈
g m R E >> 1
RiE RO
vo
io
vi
1
≈ R E //
gm
ie ve
RE
1
gm
RL
R*E
Amplificatore CC (CD) – AV e AG
R B ,T g m R E*
vo
vb ve
*
AV =
=
= α V , B AV , EB R E = R E ≈
vi
vi vb
R I 1 + g m R E*
(
G V = AV
RI → 0
RL → ∞
≈
g mRE
= AV , EB
1 + g m RE
)
≈
g m R E >> 1
1
(inseguitore o buffer di tensione)
R B ,T g m R E*
io
vo
AV
1
AG =
=
=
≈
vi
R L vi
RL
R I 1 + g m R E* R L
G G = AG
RI → 0
RL → 0
= gm
Amplificatore CC (CD) – AI e AR
io
io
g m R E*
1
AI =
=
R I = A G R I ≈ R B ,T
ii
vi
1 + g m R E* R L
G I = AI
RI → ∞
RL → 0
= g m R IN
Rin,B
RC
RiB i
b
vb
ii
RB
RI
ie ve
RiE RO
io
RE
vo
io
g m R E*
AR =
=
R L = A I R L ≈ R B ,T
1 + g m R E*
ii
ii
G R = AR
RI → ∞
RL → ∞
=
g mRE
R IN
1 + g m RE
vo
≈
g m R E >> 1
R IN
RL
R*E
Amplificatore CC (CD)
VCC
R2
CAB
CAE
RI
vO
R1
RE
RL
vI
RC non necessaria ne dal punto di vista statico (OP) ne da quello dinamico.
Dinamica di ingresso dell’amplificatore CC
condizione di piccolo segnale
v be ≤ v be . max
v be = ib rπ = v b
v b = v be
vi ≤
rπ
R iB
R iB
R iB
≤ v be . max
≈ v be . max 1 + g m R E*
rπ
rπ
(
R in , B + R I
R in , B
(
(
v be . max 1 + g m R E*
)
(
)
v b ≤ 5 mV 1 + g m R E*
*
v g ≤ 0 . 2 (V GS − V TN ) 1 + g m R S
)
aumentando RE o diminuendo RB
aumenta l’ampiezza massima ammessa
delle variazioni del segnale di ingresso
in condizione di linearità
BJT
)
FET
Amplificatori CC e CD
*
E
g mR
≈1
*
1 + g m RE
g m R S*
≈1
*
1 + g m RS
R B // R in , B
g m R E*
≈1
1 + g m R E* R B // R in , B + R I
g m R S*
RG
≈1
*
1 + g m R S RG + R I
(
RG
R B || rπ 1 + g m R E*
≈
1
gm
(
5 mV 1 + g m R E*
)
≈
)
1
gm
(
0 . 2 (V GS − V TN ) 1 + g m R S*
)
Amplificatore CB (CG) – RIN e RO
RiC
RO
vc
RiB i
b
vo
io
RL
RC
R*C
RiE
RB
Rin
RI R*
E
RE
vi
R in = R in , E = R E // R iE ≈ R E //
[
(
R O = R C // R iC R E = R E*
1
gm
≈
g m R E >> 1
1
gm
)] ≈ R // [r (1 + g
C
O
*
R
m
E
)]
Amplificatore CB (CG) – AV e AG
R E ,T
vo
ve vc
*
=
= α V , E AV , CE R C = R C ≈
g m R C*
AV =
RI
vi
vi ve
(
G V = AV
RI → 0
RL → ∞
≈ g m R C = AV , CE
R E ,T
io
vo
AV
R C*
AG =
=
=
≈
gm
vi
R L vi
RL
RI
RL
G G = AG
RI → 0
RL → 0
≈ g m = − AG , CE
)
Amplificatore CB (CG) – AI e AR
io
io
R C*
AI =
=
R I = AG R I ≈ R E ,T g m
ii
vi
RL
G I = AI
RI → ∞
RL → 0
≈ g m R IN
g m RE
=
1 + g m RE
≈
g m R E >> 1
1
(inseguitore o buffer di corrente)
vo
io
=
AR =
R L = A I R L ≈ R E ,T g m R C*
ii
ii
G R = AR
RI → ∞
RL → ∞
≈ R IN
g m RE
g m RC =
RC
1 + g m RE
≈
g m R E >> 1
RC
Amplificatore CB (CG)
VCC
RC
R2
vO
CAC
CB
RL
R1
CAE
RE
RI
vI
•RB (R1//R2) necessaria per il punto di lavoro
•RB dinamicamente riduce i guadagni rispetto a vi aumentando la resistenza di
ingresso (indesiderato in configurazione buffer)
•CB: capacità di by-pass: permette di avere una RB statica per l’OP, mentre cortocircuita dinamicamente la base (gate) a massa per avere minore resistenza di
ingresso.
Dinamica di ingresso dell’amplificatore CB (CG)
condizione di piccolo segnale
v be ≤ v be
ve = vi
≈
R E >> R I
v b = 0 → v e ≤ v be
max
R E ,T
RI
≈ vi
(1 / g m ) // R E
max
// R I
RI
vi
1 + g m RI
v i = v e (1 + g m R I ) ≤ v be
max
(1 + g m R I )
v i ≤ 5 mV (1 + g m R I )
v i ≤ 0 . 2 (V GS − V TN )(1 + g m R I )
BJT
FET
Amplificatori CB e CG
g m R C*
g m R C*
R E // R in , E
R E // R in , E + R I
R C || r0 [1 + g m (R E 2 // R I )]
5 mV (1 + g m R I )
g m R D*
g mR
*
D
R S // R in , S
R S // R in , S + R I
R D || r0 [1 + g m (R S 2 // R I )]
0 . 2 (V GS − V TN )(1 + g m R I )
Amplificatori a BJT e FET
− g m R C* ≈ − 10 V CC
−
R C*
RE 2
g m R C* ≈ 10 V CC
(moderato)
β 0 R E 2 (alto)
β 0 (R E 2 // R L ) (alto)
R C (moderato)
− g mR
*
D
≈ − V DD
−
R C (moderato)
R D*
RS 2
g m R D* ≈ V DD
R D (moderato)
R D (moderato)
comportamento
amplificatore
transconduttivo
amplificatore di
tensione
amplificatore di
corrente
Buffer (inseguitore) di tensione
α=vo/vi: coefficiente di accoppiamento
di tensione sorgente carico
collegamento diretto sorgente-carico
vo = vi
RL
RL + RI
α = α0 =
R >> R I → v o ≈ v i
se L
R L << R I → v o ≈ 0
vo
RL
=
<1
vi
RL + RI
α →1
α → 0
buffer di tensione: amplificatore di tensione
con guadagno unitario
collegamento con buffer
• permette di disaccoppiare RI e RL
• α=αΒ=vo/vi=1 indipendentemente da RI e RL
• il guadagno effettivo rispetto al collegamento diretto
è αΒ/α0=1+RI/RL>1
Buffer (inseguitore) di corrente
α=io/ii: coefficiente di accoppiamento di
corrente sorgente carico
collegamento diretto sorgente-carico
i o = ii
RI
RL + RI
α = α0 =
R L << R I → i o ≈ i i
se
R L >> R I → i o ≈ 0
io
RI
=
<1
ii
RL + RI
α →1
α → 0
buffer di corrente: amplificatore di corrente
con guadagno unitario
collegamento con buffer
• permette di disaccoppiare RI e RL
• α=αΒ=io/ii=1 indipendentemente da RI e RL
• il guadagno effettivo rispetto al collegamento diretto
è αΒ/α0=1+RL/RI>1
Esempio: Analisi di un amplificatore CE
Problema: determinare AV, AI, AR, AG, Rin, RO, vi,max per l’amplificatore riportato in
figura. DATI: RI=2kΩ, R1=160kΩ, R2=300kΩ, RC=22kΩ, RE1=10kΩ, RE2=3kΩ,
RL=100kΩ, VCC=12V, CAB→∞, CAC→∞, CE→∞ Q1:( βF=100,VA=50V)
Analisi DC
RE=RE1+RE2=13kΩ
IC=245µA
VCE=3.64V
Modello AC
g m = I C / V T = 9 . 5 mA/V
rπ =
β0
gm
= 10 . 57 kΩ
ro =
β 0 ≈ β F = 100
V A + V CE
= 219 kΩ
IC
Esempio: Analisi di un amplificatore CE
Analisi AC
ic
Rin,B
vb
RiC
RO
vc
RiB i
b
vo
RC
io
RL
R*C
RI
RB
R B = R1 // R 2 = 104 kΩ
RE
vi
R C* = R C // R L = 18 kΩ
R E = R E 2 = 3 kΩ
R iB =
vb
= rπ (1 + g m R E ) = 310 kΩ
ib
R in = R B // R iB = 77 . 9 kΩ
v
v v
R // R in
AV = o = b c = I
vi
vi vb
RI
vi ≤
g m R C*
−
1 + g m RE
= − 5 . 65
R in + R I
v be . max (1 + g m R E ) = 150 mV
R in
r0 >> R C* + R E
β 0 >> 1
v b = ib rπ + R E i c
→
β 0 ib = i c
AG =
io
vo
A
=
= V = − 5 .65 ⋅ 10 − 5 A/V
vi
R L vi
RL
AI =
io
i
= o R I = AG R I = − 0 . 113
ii
vi
AR =
vo
i R
= o L = A I R L = − 11 . 3 kΩ
ii
ii
Esempio: Analisi di un amplificatore CE
rO >> R E
− ib rπ* + R E = R E i x
→
− ib β o rO = − i c ro + v x
β >> 1
0
R B* = R B // R I = 1 . 96 kΩ
(
)
rπ* = rπ + R B* = 12 . 53 kΩ
vx
R E // rπ*
R iC =
= rO 1 + β 0
ix
rπ*
R O = R iC // R C ≈ R C = 22 kΩ
= 4 . 4 M Ω
Esempio: Analisi di un amplificatore CS
Problema: determinare AV, AI, AR, AG, Rin, RO, vi,max per l’amplificatore riportato in figura.
DATI: RI=2kΩ, R1=1.5MΩ, R2=2.2MΩ, RD=22kΩ, RS1=10kΩ, RS2=2kΩ, RL=100kΩ,
VDD=12V, CAG→∞, CAD→∞, CE→∞ M1:(KN=500µA/V2, VTN=1V, λ=0.02V-1)
Analisi DC
VDD
R2
RS=RS1+RS2=12kΩ
RD
ID=241µA
VDS=3.81V
VGS=1.98V
M1
R1
Modello AC
gm =
=
(V GS
RS
ID
=
− V TN ) / 2
2 K n I D (1 + λ V DS
rO =
)≈
1 + λ V DS
= 223 k Ω
λI D
2 K n I D = 0 . 49 mA/V
Esempio: Analisi di un amplificatore CS
Analisi AC
R G = R1 // R 2 = 892 kΩ
R D* = R D // R L = 18 kΩ
R S = R S 2 = 2 kΩ
R iG = ∞
R in = R G // R iG = R G = 892 kΩ
v g vd
vo
R // R in
AV =
=
= I
vi
vi v g
RI
vi ≤
g m R D*
−
1 + g m RS
= − 4 . 47
v g = v gs + R S i d
r0 >> R + R S →
g m v gs = i d
*
D
AG =
io
vo
A
=
= V = − 4 .45 ⋅ 10 − 5 A/V
vi
R L vi
RL
AI =
io
i
= o R I = AG R I = − 0 . 089
ii
vi
AR =
vo
i R
= o L = A I R L = − 8 . 9 kΩ
ii
ii
R in + R I
0 . 2 (V GS − V TN )(1 + g m R S ) = 389 mV
R in
Esempio: Analisi di un amplificatore CS
vs = R S ix
v x = (i x + g m v s )ro + v s
v
R
R iD = x = rO 1 + g m R S + S ≈ rO (1 + g m R S ) = 411 kΩ
ix
rO rO >> R S
R O = R iD // R D = 21 kΩ
Esempio: confronto amplificatori CE e CS
Amplificatore CE Amplificatore CS
gm
9.5mA/V
0.49mA/V
gmRE (gmRS)
28.5
0.98
guadagno di tensione
-5.65
-4.47
resistenza di ingresso
78 kΩ
892 kΩ
resistenza di uscita
22 kΩ
21 kΩ
variazioni massime in
ingresso
150mV
389mV
•sebbene gm,CE>>gm,CS la presenza di RE (RS) provvede ad equalizzare i
guadagni
• resistenza di ingresso maggiore per il CS
• resistenze di uscita simili
• maggiore escursione in ingresso per il CS
Amplificatore CE: esempio SPICE
Problema: simulare (OP, AC, TRAN, FOUR) l’amplificatore CE precedente soggetto
ad un ingresso sinusoidale 0.5+0.1sin(2πft) f=1kHz
amplificatore emettitore comune
VCC 1 0 12
R1 2 0 160k
R2 1 2 300k
RC 1 3 22k
RE2 8 4 3k
RE1 4 0 10k
CAB 6 2 1
CAC 3 5 1
CE 4 0 1
Q1 3 2 8 bjtmodel
.model bjtmodel NPN BF=100
VAF=50
RI 6 7 2k
RL 5 0 100k
VI 7 0 AC 1 SIN (0.5V 0.1 1k)
.OP
.AC DEC 100 10 1e6
.TRAN 0.01m 2m
.FOUR 1kHz V(5)
.PROBE
.END
1
VCC
RC
R2
6
2
vI
CAC
7
0
RL
8
RE2
R1
RI
5 vO
3
CAB
4
RE1
CE
Amplificatore CS: esempio SPICE
Problema: simulare (OP, AC, TRAN, FOUR) l’amplificatore CS precedente soggetto
ad un ingresso sinusoidale 0.5+0.1sin(2πft) f=1kHz
amplificatore source comune
VCC 1 0 12
R1 2 0 1.5e6
R2 1 2 2.2e6
RD 1 3 22k
RS2 8 4 2k
RS1 4 0 10k
CAG 6 2 1
CAD 3 5 1
CS 4 0 1
M1 3 2 8 8 mosmodel L=1u W=1u
.model mosmodel NMOS VTO=1
+KP=500e-6 LAMBDA=0.02
RI 6 7 2k
RL 5 0 100k
VI 7 0 AC 1 SIN (0.5V 0.1 1k)
.OP
.AC DEC 100 10 1e6
.TRAN 0.01m 2m
.FOUR 1kHz V(5)
.PROBE
.END
1
VDD
RD
R2
6
CAG
vI
2
M1
7
0
CAD
RL
8
RS2
R1
RI
5 vO
3
4
RS1
CS
Progetto di amplificatori a transistor
• le variabili di input (specifiche di progetto) minime del problema devono riguardare
le caratteristiche di sorgente e carico, e un parametro di guadagno dell’amplificatore
(tensione, corrente, ....)
• altre variabili di input (caratteristiche dei componenti) sono opzionali. Tipicamente
costituiscono un limite pratico (es. si possiede un alimentatore regolabile fino a 20V,
si dispone solo di transistor con βF=100, non si dispone di resistenze di valore
maggiore di 1MΩ e così via....)
• un vincolo implicito nella progettazione è che il circuito si comporti in modo lineare
• non esiste un’unica soluzione al problema (e non è detto che ne esista una). Si
possono indirizzare le specifiche di progetto anche con circuiti completamente
diversi.
• più vincoli/variabili di input sono presenti, più difficile è trovare una soluzione al
problema. Se esiste, un numero maggiori di vincoli rende la soluzione sempre più
unica.
•Progettare è un’arte.....
Esempio di progetto
Problema: progettare un amplificatore a singolo transistor che fornisca un guadagno di
tensione |AV|=100 da una sorgente a 100Ω e VIM<1mV, su un carico di 10kΩ. Si
ipotizzi di avere a disposizione un’alimentazione singola e fissa a 20V e resistenze di
valore non inferiore a 100Ω.
DATI: |AV|=100, RI= 100Ω, RL= 10kΩ, VIM=1mV, VCC(VDD)=20V, Rmin= 100Ω
Soluzione:
• poichè |AV|>1 escludiamo le configurazioni CC e CD
• il guadagno di tensione richiesto rientra nella classe di valori forniti dalle
configurazioni CE, CS, CB, CG
• tuttavia il guadagno di corrente richiesto è AI=|AV|RI/RL=1. Tale vincolo potrebbe
essere soddisfatto dalle configurazioni CB o CG portate al limite del guadagno.
Probabilmente un progetto con CE o CS permette di ottenere AI=1 in modo più
rilassato.
• il massimo guadagno ottenibile con un CS è dell’ordine di VDD=20. Per tale motivo
escludiamo questa configurazione.
• il massimo guadagno ottenibile con un CE è dell’ordine di 10VDD=200 che rientra
agevolmente nella specifica richiesta. Scegliamo quindi di progettare un CE.
Esempio di progetto
ipotesi di progetto:
1. ro>>R*C+RE
2. β0>>1
3. Rin>>RI
sotto tali ipotesi AV
Poichè
AV
R C* < R L
g m R C*
≈
1 + g m RE 2
R E 2 ≥ R min
g mRL
1
1
R min
<
→
>
+
1 + g m R min
AV
g m RL
RL
impossibile
Proviamo con RE2=0
AV
AV V T
IC RL
≈ g mR < g m RL =
→ IC >
= 259 μA
VT
RL
*
C
Esempio di progetto
ipotesi di progetto:
1. ro>>R*C+RE
2. β0>>1
3. Rin>>RI
RE 2 = 0 → IC >
AV V T
RL
= 259 μA
Per soddisfare la 2 scegliamo un transistor con βF=100
Per soddisfare la 3 deve essere
R in = R1 // R 2 // R iB >> R I = 100 Ω
Condizione necessaria è R iB = rπ + β 0 R E 2 =
β 0V T
IC
+ β 0 R E 2 >> R I → I C << 25 . 9 mA
Scegliamo
I C = 1mA → g m =
A
IC
mA
= 38 . 6
→ R C* = V = 2 . 59 kΩ → R C = 3 . 5 kΩ
VT
V
gm
Esempio di progetto
ipotesi di progetto:
1. ro>>R*C+RE
2. β0>>1
3. Rin>>RI
I B = I C / β F = 10 µ A → I E = I B + I C = 1 . 01 mA
scegliamo R E 1 = 4 . 7 kΩ
V CE = V CC − I C R C − I E (R E 1 + R E 2 ) = 11 . 8 V ≥ V BE , ON − V BC , ON ≈ 0 zona attiva
OK
Per rendere il potenziale di base indipendente da Q1
dobbiamo scegliere
V CC
V
>> I B → R1 + R 2 << CC = 2 M Ω → R1 + R 2 ≤ 200 kΩ
R1 + R 2
IB
Per soddisfare l’ipotesi 3 deve essere anche R1 , R 2 >> R I = 100 Ω
Se fissiamo R1=R2=100 kΩ rispettiamo sia la condizione di
indipendenza di VB da Q1 che l’ipotesi 3.
Esempio di progetto
ipotesi di progetto:
1. ro>>R*C+RE
2. β0>>1
3. Rin>>RI
Per soddisfare l’ipotesi 1 dobbiamo scegliere Q1 con
(
)
V A >> R C* + R E 2 I C − V CE = − 9 . 2 V
qualunque VA va bene
Verifichiamo infine i vincoli di dinamica di ingresso e uscita
V M < min {I C R C , (V CE − V BE , ON + V BC , ON
V IM ≤
)} ≈ 3 .5 V → V
R in + R I
v be . max (1 + g m R E 2 ) ≈ 5 mV
R in
Vincoli rispettati poichè VIM<1mV
IM
= V M / AV < 35 mV
Contenuti del corso
Introduzione e concetti fondamentali
richiami di teoria dei circuiti
la simulazione circuitale con SPICE
elementi di Elettronica dello stato solido
Parte I: Dispositivi Elettronici
il diodo a giunzione
transistori ad effetto di campo (FETs)
il transistore bipolare (BJT)
Parte II: Circuiti amplificatori a transistors
generalità sugli amplificatori elettronici
modelli di piccolo segnale dei dispositivi elettronici
amplificatori a BJT e FETs:
analisi in DC
analisi in AC a medie frequenze
risposta in frequenza
Analisi nel dominio della frequenza (AC)
La risposta in frequenza (reti lineari) è descritta dalla funzione di risposta armonica
H(f), che è una funzione complessa (modulo e fase) della variabile reale f
H ( f ) = H ( f ) e jΦ H ( f )
x(t)
H ( f)
y (t)
significato
y(t)
x (t ) = AX sin (2πft + Φ X )
y (t ) = AY sin (2πft + Φ Y )
AY
= H( f )
AX
t
ΦY = Φ X + Φ H ( f )
x(t)
•le relazioni ingresso-uscita di modulo e fase sono descritte dalla H(f) a regime
•|H|, ΦH sono funzioni reali di variabile reale (f). La loro rappresentazione grafica al
variare di f è chiamata diagramma di Bode
• l’analisi in regime sinusoidale viene estesa agli altri segnali utilizzando i concetti di
sovrapposizione degli effetti e sviluppo in serie di Fourier
La trasformata di Laplace
operatore funzionale lineare che associa ad una funzione (f) di variabile
reale (t) una funzione complessa (F) di variabile complessa (s=σ+jω)
+∞
f (t ) ⇔
F ( s ) = L{ f (t )}( s ) =
∫
f (t )e − st dt
0
L{ f '} = sF ( s ) − f (0 + )
alcune delle proprietà più importati sono
quelle di derivazione e integrazione
t
F (s)
L ∫ f (τ )dτ =
s
0
Tali proprietà permettono di trasformare equazioni integro-differenziali nel dominio t
(spesso di difficile risoluzione) in equazioni algebriche nel dominio s (spesso di più
semplice risoluzione). Una volta risolta l’equazione nel dominio s, è necessario
ritornare nel t attraverso l’operazione di trasformata inversa.
La trasformata di Laplace è uno strumento per risolvere equazioni (o
sistemi di equazioni) integro-differenziali.
Trasformata di Laplace e analisi circuitale
•le reti lineari, o in regime di funzionamento lineare (piccolo segnale), sono descritte da equazioni
integro-differenziali (derivate e integrali nel dominio t sono dovuti agli elementi reattivi quali
capacità e induttanze)
• quindi è possibile usare la trasformata di Laplace per la risoluzione della rete lineare nel dominio
del tempo.
• è possibile usare la trasformata di Laplace anche per l’analisi nel dominio f attraverso il concetto
di funzione di trasferimento H(s)
Y ( s)
H (s) =
X (s)
X ( s)
H ( s)
Y ( s)
• infatti nel caso s=jω (σ=0) la H(s) si riduce alla H(f) (equivale a considerare la risposta a
regime e rendere ininfluenti le condizioni iniziali)
• piuttosto che scrivere le equazioni nel dominio t, e poi portarle nel dominio s (così come si
farebbe per la risoluzione di un problema astratto di analisi), si usa un approccio più pratico che
consiste nel L-trasformare il circuito ottenendo un circuito equivalente nel dominio s composto da
componenti le cui relazioni IV sono le trasformate di quelle del dominio s
Trasformata di Laplace e analisi circuitale
iC (t ) = C
dvC (t )
dt
v L (t ) = L
I R ( s ) = L{iR (t )} =
v (t ) V ( s )
L R = R
R
R
I C ( s ) = L{iC (t )} =
dv (t )
L C c = C sVC ( s ) − vc (0 + )
dt
1
vc (0 + ) = 0 → VC ( s ) =
I C (s)
sC
[
di L (t )
dt
VL ( s ) = L{vL (t )} =
]
di (t )
L L L = L sI L ( s ) − iL (0 + )
dt
iL (0 + ) = 0 → VL ( s ) = (sL )I L ( s )
[
]
• le condizioni iniziali possono essere assunte nulle poichè ci interessa solo la risposta a regime
•le relazioni IV di R, L, C nel dominio s sono del tipo V(s)=Z(s)I(s)
•Z(s) : impedenza complessa
Trasformata di Laplace e analisi circuitale
Calcolo della H(f) (modulo e fase) dei circuiti lineari attraverso la
trasformata di Laplace
1.
si L-trasforma il circuito: si considera ogni condensatore C come una
resistenza di valore 1/sC e ogni induttanza L come una resistenza di
valore sL
2.
si calcola la H(s) di interesse (es. VO(s)/VI(s), IO(s)/VI(s),.....)
3.
si ottiene la H(f) come H(f)=H(s=jω)
Trasformata di Laplace e analisi circuitale
La funzione H(s) dei circuiti elettrici lineari ha la forma di
rapporto di polinomi nella variabile s
N ( s ) am s m + ... + a1s + a0
H (s) =
=
D ( s ) bn s n + ... + b1s + b0
m≤n
ai , bi ∈ ℜ
(
s − z1 )(s − z 2 )L (s − z m )
H ( s) = K
(s − p1 )(s − p2 )L (s − pn )
z1, z2, ...zm: zeri di H(s) (e di N(s))
p1, p2, ...pn: poli di H(s) (zeri di D(s))
•poli e zeri sono, in generale, numeri complessi
•nel seguito ci limiteremo ai casi in cui sono numeri reali
Trasformata di Laplace e analisi circuitale
(
s − z1 )(s − z 2 )L (s − z m )
=
H (s) = K
(s − p1 )(s − p2 )L (s − pn )
(
s + ω )(s + ω )L (s + ω )
(
1 + sτ )(1 + sτ )L (1 + sτ )
=K
= K'
(s + ω )(s + ω )L (s + ω ) (1 + sτ )(1 + sτ )L (1 + sτ )
z1
z2
zm
Z1
Z2
Zm
p1
p2
pm
P1
P2
Pn
ω z ω z Lω z
K'= K
ω P ω P Lω P
1
2
m
1
2
n
f Zi = ω Zi / 2π
frequenza dello zero z i
f Pi = ω Pi / 2π
frequenza del polo p i
τ Zi = 1 / ω Zi costante di tempo dello zero z i
τ Pi = 1 / ω Pi costante di tempo del polo p i
• è importante non confondere uno zero (polo) con la frequenza (o costante di tempo) di zero
(polo)
• ad un polo (zero) in zero (a frequenza zero) corrisponde una costante di tempo infinita
Sistemi con risposta passa-basso
funzione di trasferimento
risposta in frequenza
A0
Av ( s ) =
1 + sτ H
A0
A0
=
Av ( jω ) =
1 + jωτ H 1 + j ω
ωH
modulo della risposta in frequenza
A0
Av ( jω ) =
2
ω
1 +
ωH
ω << ω H → Av ( jω ) ≈ A0
ω >> ω H → Av ( jω ) ≈
A0
ω / ωH
Av
Av
dB
= 20 log A0
dB
= 20 log A0 − 20 log
ω
ωH
fH definisce la banda passante (BW) del sistema e assume il significato di
frequenza di taglio superiore
Av ( jω H ) = A0 / 2
Av ( jω H ) dB = 20 log A0 − 3
Sistemi con risposta passa-basso
Esempio: filtro passivo passa-basso
Av ( s ) =
A0 = 1
τ H = RC
ωH =
1
=
1
RC
τH
ω
1
fH = H =
2π 2πRC
1
sC
VO ( s )
1
=
=
1
VI ( s )
+ R 1 + sRC
sC
Sistemi con risposta passa-alto
funzione di trasferimento
risposta in frequenza
ω
j
ωL
jωτ L
Av ( jω ) = A0
= A0
ω
1 + jωτ L
1+ j
ωL
sτ L
Av ( s ) = A0
1 + sτ L
modulo della risposta in frequenza
ω
A0
ωL
Av ( jω ) =
ω
1 +
ωL
ω << ω L → Av ( jω ) ≈ A0
ω >> ω L → Av ( jω ) ≈ A0
ω
ωH
2
Av
Av
dB
dB
= 20 log A0 + 20 log
ω
ωL
= 20 log A0
fL definisce il limite inferiore della BW del sistema e assume il significato di
frequenza di taglio inferiore Av ( jω L ) = A0 / 2
Av ( jω H ) dB = 20 log A0 − 3
Sistemi con risposta passa-alto
Esempio: filtro passivo passa-alto
VO ( s )
R
sRC
Av ( s ) =
=
=
1
VI ( s )
+ R 1 + sRC
sC
A0 = 1
τ L = RC
ωL =
1
=
1
RC
τL
ω
1
fL = L =
2π 2πRC
Sistemi con risposta passa-banda
funzione di trasferimento
Av (s) =
Ks s +ω2
s +ω1 s + ω3 s + ω4 s + ω5
•le frequenze di taglio inferiore (fL) e superiore (fH) sono definite come
Av ( jω L ) = Amid / 2
Av ( jω L ) dB = 20 log Amid − 3
Av ( jω H ) = Amid / 2
Av ( jω H ) dB = 20 log Amid − 3
• se ω1, ω2 << ω3
• se ω5 >> ω4
ωL ≈ ω3 (ω3 è un polo dominante)
ωH ≈ ω4 (ω4 è un polo dominante)
Risposta in frequenza degli amplificatori
• gli amplificatori a transistor hanno una risposta di tipo passa banda, dove la parte di bassa-f è
generalmente dovuta alle capacità di accoppiamento e by-pass, mentre la parte di alta-f è
generalmente dovuta alle capacità dei transistor stessi
• tipicamente si progetta in modo tale che i limiti di
banda sono definiti da un “polo dominante”
• tutte le variabili coinvolte sono in generale
funzione di f, e quindi analizzabili nel dominio s
• è necessario studiare la risposta in frequenza dei
transistors
AV ( s ) =
VO ( s )
Z IN ( s )
Z L (s)
= GV ( s )
VS ( s )
Z L ( s ) + Z O ( s ) Z IN ( s ) + Z S ( s )
Modello di piccolo segnale del BJT
modello SPICE
Cπ = g m TF
Cµ =
Cµ: capacità dovuta alla regione di
svuotamento BC (dipende poco dal Q)
Cµ =
Cµ 0
1+
VCB
φ jbc
CJC
MJC
V
1 + CB
VJC
valori di default :
TF = 0
CJC = 0
MJC = 0.33
VJC = 0.75V
Cπ: capacità di diffusione della
giunzione BE
Cπ = g mτ F
• a medie/basse frequenze le impedenze di Cµ,Cπ sono generalmente molto grandi e trascurabili
• all’aumentare di f le loro impedenze si abbassano, al punto di cortocircuitare i 3 terminali
portando l’amplificazione a 0.
Modello di piccolo segnale del BJT
1
VBE ( s ) = I B ( s ) rπ //
sC µ
(
)
s
C
+
C
β 0 1 −
π
µ
gm
β0
I C ( s)
β
I
(
s
)
+
I
(
s
)
=
g
V
(
s
)
→
(
s
)
=
=
≈
C
m BE
µ
I B ( s ) 1 + srπ (Cπ + C µ ) 1 + srπ (Cπ + C µ )
I
(
s
)
=
sC
V
(
s
)
µ BE
µ
•lo zero nel semipiano destro corrisponde a una frequenza ωZ=gm/Cµ estremamente elevata e può
essere
generalmente trascurato
• la risposta in frequenza presenta un polo a frequenza f β =
1
2πrπ (Cπ + C µ )
• la frequenza fT per cui |β(f)|=1 è detta frequenza di transizione
• la fT rappresenta il limite di f a cui il transistor presenta guadagno di corrente
β(f ) ≈
β0 fβ
f >> f β
fT ≈ β 0 f β =
f
gm
< fZ
2π (C µ + Cπ )
Modello di piccolo segnale del BJT
• rx: resistenza di accesso alla base (parametro SPICE : RB)
• effetti trascurabili a bassa-f, può essere rilevante ad alta-f
• il modello a medie-f può essere modificato per includere l’effetto di rx
ib =
vbe
v
= be'
rπ + rx rπ
v = vbe
rπ
→ g m v = g m' vbe
rπ + rx
rπ' = rπ + rx
g m' = g m
rπ
rπ + rx
Modello di piccolo segnale del FET
modello SPICE
2 ε ox
WL + CGSO ⋅ W
3 TOX
= CGDO ⋅ W
CGS =
CGD
valori di default :
TOX = 100nm
CGS0 = 0
CGD0 = 0
• CGS, CGD dovute alla capacità dell’ossido di gate e alle regioni sovrapposizione
gate/source e gate/drain
• la corrente di gate è diversa da zero (f > 0)
corrente finiti
impedenza di ingresso e guadagno di
• riducendo la dimensione dei dispositivi diminuiscono CGS e CGD aumentando fT
fT ≈
gm
1
∝ 2
2π (CGS + CGD ) L
Esempio: risposta completa in bassa-f di un CS
AV ( s ) =
VO ( s ) VO ( s ) VGS ( s ) VG ( s )
=
VI ( s ) VGS ( s ) VG ( s ) VI ( s )
VO ( s ) = I O ( s ) R3 = − g mVGS ( s )
1
RD + R3 +
sC3
s
= − g m (RD // R3 )
s+
Z S ( s ) = RS //
RD
1
R3 =
VGS ( s )
C3 (RD + R3 )
1
RS
=
sC2 1 + sRS C2
VS = g mVGS Z S = g mVG Z S − g mVS Z S
C3
C2
1
1
RS C2
=
VG =
VG
1
1 + gm Z S
s+
C2 (RS // 1 / g m )
s+
VGS
VG =
RG
1
RG + RI +
sC1
VI =
RG
RG + RI s +
s
1
C1 (RG + RI )
VI
Esempio: risposta completa in bassa-f di un CS
V (s)
F (s)
A (s) = o = A
mid L
v
V (s)
i
R
G
A
= − g (R R )
mid
m 3 D R +R
G
I
C3
C2
ωz =
1
C R
2 S
0
0
= 76.9rad/s
F (s) =
L
]
)
1
1
1
s +
s +
s +
R
)
C (R + R )
C
(R
+
C ( 1/g ) R
1 I
G
3 D
3
2
m
S
1
= 41rad/s
C (R + R )
1 I G
1
ωp =
= 95.9rad/s
C (1/ g ) R
2
m S
1
= 200rad/s
C (R + R )
2 D 3
[
(
s 2 s + ( 1/C R )
2 S
f Z 1 = 12.24Hz
f P1 = 6.52Hz
f P 2 = 15.26 Hz
f P 3 = 31.83Hz
Amid = −5.05
Esempio: risposta completa in bassa-f di un CS
(
)
A
s2 s + ω
mid
Z1
A (s ) =
v
s +ω
s +ω
s +ω
P1
P2
P3
(
1
= 41rad/s
C (R + R )
1 I G
1
ωp =
= 95.9rad/s
C (1/ g ) R
2
m S
1
= 200rad/s
C (R + R )
2 D 3
[
]
)(
)(
ωz =
1
C R
2 S
)
0
0
= 76.9rad/s
•
ogni condensatore indipendente nel circuito contribuisce con un polo, la costante di
tempo è pari al prodotto capacità x resistenza vista
•
i condensatori in serie C1 e C3 forniscono i due zeri a s=0 (DC), che bloccano la
propagazione della componente continua nell’amplificatore
•
il terzo zero è legato alla condizione ZS=∞ che annulla la corrente e quindi la tensione
di uscita
Esempio: risposta completa in bassa-f di un CS
Bode Diagram
20
10
0
Magnitude (dB)
-10
-20
-30
-40
-50
matlab code:
bode(-5.05*[1 76.9 0 0],[1 336.9 31311.9 786380])
-60
-70
-80
360
Phase (deg)
315
270
225
180
0
1
10
10
2
10
3
10
Frequency (rad/sec)
2
s ( s + 76.9)
Av ( s ) = −5.05
( s + 41)( s + 95.9)( s + 200)
f Z 1 = 12.24Hz
f P1 = 6.52Hz
f P 2 = 15.26 Hz
f P 3 = 31.83Hz
Amid = −5.05 = 14.1dB
4
10
Metodo delle costanti di tempo
• il calcolo della risposta in frequenza complessiva è spesso complicata
(sopratutto in alta frequenza)
• spesso si è interessati solo alle proprietà a centro banda e a conoscere i limiti
di banda (fL, fH)
• i metodi delle costanti di tempo in cortocircuito e circuito-aperto permettono
di stimare fL e fH senza calcolare la risposta complessiva
Metodo delle costanti di tempo in cortocircuito
progetto delle capacità di accoppiamento/bypass
Ci
1. si supponga che, nella banda di interesse, tutte le C di
alta-f siano circuiti-aperti e si consideri la generica
capacità Ci di bassa-f della rete
ZVCi
2. ipotizziamo che tutte le altre C siano di valore così
grande che possano essere considerati cortocircuiti nella
banda di interesse
ZVCi=RVCi puramente reale
3. affinchè anche Ci possa essere considerato un
cortocircuito in tale banda, è necessario che
1
<< RVCi
ωC i
∀ω
di interesse →
1
1
<< RVCi → Ci >>
ω L Ci
ω L RVCi
4. si ripete la 3 per ogni Ci in modo che sia verificata la 2
stima della frequenza di taglio inferiore
•la fL può essere stimata come
•tipicamente si progetta a polo dominante
1
fL ≅
2π
n
1
1
VCi
∑R
Ci
Metodo delle costanti di tempo a circuito aperto
stima della frequenza di taglio superiore
Ci
ZVCi
1. si supponga che, nella banda di interesse, tutte le C di
bassa-f siano corto-circuiti e si consideri la generica
capacità Ci di alta-f della rete
2. ipotizziamo che tutte le altre C di alta-f siano di valore
così piccolo che possano essere considerati circuiti aperti
nella banda di interesse
ZVCi=RVCi puramente reale
3. affinchè anche Ci possa essere considerato un circuito
aperto in tale banda, è necessario che
1
>> RVCi
ωC i
∀ω
di interesse
4. la frequenza di taglio superiore (fH) può essere stimata
come
1
fH ≅
n
2π ∑ RVCi Ci
1
Esempio: amplificatore CE
Problema: determinare il guadagno AV a centro banda e i limiti di banda per l’amplificatore
riportato in figura. Simulare con SPICE. DATI: RI=1kΩ, R1=10kΩ, R2=30kΩ, RC=4.3kΩ,
RE=1.3kΩ, RL=100kΩ, VCC=12V, CAB=1µF, CAC=0.1µF, CE=10µF, CL=10pF,
Q: βF(BF)=100, VBE,ON=0.7V, φjbc(VJC)=0.75V, Cµ0(CJC)=1pF, rx(RB)=250Ω, tF(TF)=0.3ns,
MJC=0.5
analisi DC:
IC=1.6mA,VCE=3V VCB=2.3V
CL: capacità (di alta-f) parassita di RL
e/o della linea di interconnessione
Esempio: amplificatore CE
β 0 ≈ β F = 100
g m = I C / V T = 61 . 8 mA/V
rπ =
Cµ =
β0
gm
= 1 . 62 k Ω
Cµ0
1+
V CB
ro =
= 0 . 5 pF
C π = g mτ F = 19 pF
φ jc
rπ' = rπ + rx = 1 . 87 k Ω
fT =
V A + V CE
=∞
IC
g m' = g m
rπ
= 53 . 5 mA/V
rπ + rx
gm
= 504 MHz
2 π (C π + C µ )
analisi a centro banda
RiB = rπ' = 1.87 kΩ
RB = R1 // R2 = 7.5kΩ
Rin = RB // RiB = 1.5kΩ
RC* = RC // R L = 4.1kΩ
Av ,mid = −
Rin
g m' RC* = −132 (42.4dB)
Rin + RI
modello AC
Esempio: amplificatore CE
analisi a bassa frequenza
RC AB = RI + Rin = 2.5kΩ
RiC
RC E = RE // RiE ≈ RE //
RO
CAC
X
RC
RI
1
= 18.4Ω
'
gm
X
RL
metodo delle costanti di
tempo in corto-circuito
RB
RC AC ≈ RC + RL = 104.3kΩ
fL ≈
1
2π
1
1
1
+
+
RC C AB RC C AC RC C E
AC
E
AB
= 911Hz
Esempio: amplificatore CE
resistenza vista da Cπ (Cµ e CL aperti)
analisi ad alta frequenza
RCπ = rπ 0
RC*
RC*
RCπ = rπ 0 = rπ // [rx + (RB // RI )] = 656Ω
resistenza vista da CL (Cπ e Cµ aperti)
RC* RC = RC* = 4.1kΩ
resistenza vista da Cµ (Cπ e CL aperti)
L
RC*
metodo delle costanti di
tempo in circuito-aperto
fH ≅
1
= 1.14MHz
2π RCπ Cπ + RCµ C µ + RC L C L
(
)
v x = v + (ix + g m v ) RC*
RCµ
v = ix rπ 0
vx
RC*
*
= = rπ 0 1 + g m RC +
ix
rπ 0
Esempio: amplificatore CE
amplificatore emettitore comune
VCC 1 0 12
R1 2 0 10k
R2 1 2 30k
RC 1 3 4.3k
RE 4 0 1.3k
CAB 6 2 2u
CAC 3 5 0.1u
CE 4 0 10u
Q1 3 2 4 bjtmodel
.model bjtmodel NPN BF=100 RB=250
+CJC=1p MJC=0.5 TF=0.3n
RI 6 7 1k
RL 5 0 100k
CL 5 0 10p
VI 7 0 AC 1
.OP
.AC DEC 100 10 1e8
.PROBE
.END
Esempio: amplificatore CE
Problema: determinare i valori delle capacità
di bassa-f per aumentare la fL a 10 kHz
RC E = RE // RiE ≈ RE //
RC AB = RI + Rin = 2.5kΩ
RiC
RO
RC
RI
Progetto a polo dominante: fissiamo la
costante di tempo di CE in corrispondenza di
fL e quelle delle altre C a fL/10 (per avere CE
non troppo alta)
CAC
X
1
= 18.4Ω
'
gm
X
RL
CE =
RB
1
1
= 865nF C AB = 10
≈ 63.6nF
2πf L RC AB
2πf L RCE
C AC = 10
RC AC ≈ RC + RL = 104.3kΩ
fL ≈
1
2π
1
≈ 1.5nF
2πf L RC AC
1
1
1
+
+
RC C AB RC C AC RC C E
AC
E
AB
1
1
≈
≈ 10kHz
2π RC C E
E
Esempio: amplificatore CE
amplificatore emettitore comune
VCC 1 0 12
R1 2 0 10k
R2 1 2 30k
RC 1 3 4.3k
RE 4 0 1.3k
CAB 6 2 63.6nF
CAC 3 5 1.5nF
CE 4 0 865n
Q1 3 2 4 bjtmodel
.model bjtmodel NPN BF=100 RB=250
+CJC=1p MJC=0.5 TF=0.3n
RI 6 7 1k
RL 5 0 100k
CL 5 0 10p
VI 7 0 AC 1
.OP
.AC DEC 100 10 1e8
.PROBE
.END