Sito Personale di
Ettore Limoli
Lezioni di Matematica
Prof. Ettore Limoli
Complementi di Geometria Analitica.
Sommario
Complementi di Geometria Analitica. ................................................................................................. 1
1. Simbolismo adottato. ................................................................................................................... 1
2. Matrici e determinanti. ................................................................................................................. 2
3. Premessa....................................................................................................................................... 3
4. Uso degli spazi a una o più dimensioni in Fisica. ........................................................................ 4
5. Punti propri e impropri................................................................................................................. 5
6. Coordinate omogenee. ................................................................................................................. 6
7. Punti impropri delle coniche e invariante ortogonale . .............................................................. 7
8. Discriminante di una conica. ........................................................................................................ 9
8-1. Esempio. ............................................................................................................................. 10
8-2. Esempio .............................................................................................................................. 11
8-3. Esempio. ............................................................................................................................. 12
9. Fasci di coniche.......................................................................................................................... 13
9-1. Esercizio. ............................................................................................................................ 14
10. Polarità rispetto ad una conica. ................................................................................................ 17
10-1. Esempio. ........................................................................................................................... 18
10-2. Esempio. ........................................................................................................................... 18
11. Area di un triangolo. ................................................................................................................ 19
11-1. Esempio. ........................................................................................................................... 19
12. Trasformazioni affini. .............................................................................................................. 20
12-1. Esercizio. .......................................................................................................................... 20
13. Conclusioni. ............................................................................................................................. 21
1. Simbolismo adottato.
:
per ogni, qualunque (quantificatore universale).
esiste (quantificatore esistenziale).
tale che.
congiunzione logica (and logico).
disgiunzione logica (or logico).
implicazione.
1
0
N
N0
Z
Q
implica e complica.
appartenenza ad un insieme.
prodotto cartesiano fra insiemi.
insieme dei numeri reali.
insieme dei numeri reali escluso lo zero.
insieme dei numeri naturali.
insieme dei numeri naturali escluso lo zero.
insieme degli interi relativi.
insieme dei razionali.
2. Matrici e determinanti.
Una tabella di numeri disposti per righe e colonne è detta matrice. In genere una matrice m
righe ed n colonne si indica:
a 11
a 21
.
.
a m1
a 12
a 22
....
....
a 1n
a 2n
,
a m2
.... a m n
dove a r c è l’elemento della r-esima riga e c-esima colonna.
Se m = n la matrice si dice quadrata. Ad ogni matrice quadrata si associa un numero detto
determinante della matrice. Il determinante di una matrice n n si indica con:
a 11 a 12 .... a 1n
a 21 a 22 .... a 2n
.
.
.
a n1 a n2 .... a n n
Per n = 1 il determinante coincide con il numero dato:
| a 11 | = a 11.
Per n = 2 il determinante è dato da:
a 11 a 12
a 11 a 22 a 12 a 21 .
a 21 a 22
Ossia si moltiplicano gli elementi della diagonale principale ed al prodotto si sottrae quello
degli elementi della diagonale secondaria.
Per n = 3 si procede, ad esempio, secondo la regola di Sarrus.
Si dispongono i dati della tabella secondo lo schema di seguito riportato:
2
a 11
a 12
a 21
a 22
a 31
a 32
a 13
a 23
a 11
a 21
a 12
a 31
a 33
a 22
a 32
La matrice viene allargata ripetendo le prime due colonne. Ciò fatto si sommano fra loro i
prodotti degli elementi appartenenti a diagonali parallele alla diagonale principale
(evidenziata nello schema), si calcola cioè:
d 1 = a 11 a 22 a 33 + a 12 a 23 a 31 + a 13 a 21 a 32 .
Si procede ad analogo calcolo seguendo le parallele alla diagonale secondaria.
a 11
a 12
a 21
a 22
a 31
a 32
a 13
a 23
a 33
a 11
a 12
a 21
a 22
a 31
a 32
Otteniamo quindi:
d 2 = a 31 a 22 a 13 + a 32 a 23 a 11 + a 33 a 21 a 12 .
Il determinante cercato è dato da: det = d 1 – d 2.
Per il determinante di ordine superiore al tre rimandiamo il lettore alla consultazione di un
qualsiasi testo di algebra delle matrici.
3. Premessa.
La geometria analitica del piano si fonda sull’esistenza di una biiezione (corrispondenza
biunivoca) che associa ad ogni coppia ordinata di numeri reali (x, y) un punto del piano e
viceversa. Le coppie ordinate di numeri reali (x, y) sono elementi del prodotto cartesiano
che viene spesso indicato con 2; pertanto 2 diventa sinonimo di piano cartesiano.
Analogamente a quanto detto, ad ogni terna ordinata di numeri reali (x, y, z) si associa un
punto dello spazio e viceversa, ossia 3 rappresenta lo spazio.
L’esponente nella potenza di indica la dimensione dello spazio, ossia:
0
lo spazio a zero dimensioni (punto) si indica con ;
1
lo spazio ad una dimensione (retta) si indica con ;
2
lo spazio a due dimensioni (piano) si indica con ;
3
lo spazio a tre dimensioni (l’ordinario spazio tridimensionale) si indica con .
Questo consente di generalizzare il concetto di spazio e di considerare uno spazio a n
dimensioni n, ossia l’insieme delle n-uple ordinate di numeri reali del tipo:
(x 1, x 2, …, x n).
Ovviamente uno spazio con più di tre dimensioni non può essere immaginato dalla nostra
mente (noi siamo esseri tridimensionali). Tuttavia, per fare geometria analitica, non serve
disegnare le figure, si opera soltanto algebricamente. Pertanto, il crescere il numero di
dimensioni dello spazio non costituisce un problema concettuale, ma solo algebrico.
3
Il modo di procedere della geometria analitica schiude orizzonti della mente impensabili per
chi si limita a fare geometria sintetica (così come ci è stata tramandata da Euclide), lasciando
che la matematica ci consenta di immaginare cose di cui la mente non riesce a darsi
un’immagine visiva.
La matematica è il nostro terzo occhio, l’occhio della mente, che ci consente conoscenze
slegate dal sensibile. La geometria non è più una pura descrizione, sia pur come modello,
dello spazio fisico (come voluto da Euclide), ma un mondo a sé che può fungere da modello
descrittivo dello spazio fisico, ma può anche andare oltre.
Una domanda che sorge spontanea è questa: “È proprio utile poter lavorare con spazi n
dimensionali o si tratta di un puro diletto della mente”? È a questa domanda che tenteremo di
dare una risposta.
4. Uso degli spazi a una o più dimensioni in Fisica.
In fisica, per descrivere il moto di oggetti, sia pur tridimensionali, ci si serve di spazi di
dimensioni variabili. La dimensione dello spazio è legata al “grado di libertà” dell’oggetto e
non alla sua dimensione fisica. Facciamo qualche esempio per chiarire questo asserto.
Il moto di una porta (oggetto tridimensionale) è descrivibile mediante un unico parametro
(grado di libertà) che è l’angolo di apertura della porta. Assegnato l’angolo di apertura la
porta può assumere solo un’unica posizione. Quindi uno spazio 1 è sufficiente per
descrivere questo tipo di moto.
Per fare il punto di una nave occorrono due parametri (latitudine e longitudine), pertanto il
moto è descrivibile in 2.
Per un la posizione di un aereo occorrono tre parametri: latitudine, longitudine e altitudine;
pertanto il suo moto è descrivibile in 3.
B
A
Figura 1
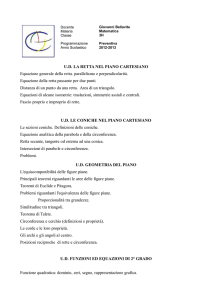
Per descrivere la posizione nello spazio di un’asta rigida di lunghezza L, occorrono almeno
cinque parametri (figura 1). Siano, ad esempio, A e B gli estremi dell’asta di lunghezza L.
Fissate le coordinate cartesiane (x, y, z) di A, il punto B è vincolato a stare su una sfera di
centro A e raggio L (lunghezza di AB), pertanto occorrono altri due parametri (, ), ossia la
latitudine e la longitudine sulla suddetta sfera. Essendo quindi cinque i gradi di libertà, il moto
dell’asta è descrivibile in 5.
Analogamente si potrebbe dimostrare che la posizione di un compasso è descrivibile in 8,
perché otto sono i gradi di libertà in questo caso.
Questi esempi dimostrano che, pur avendo a che fare con oggetti dello spazio ordinario a tre
dimensioni, la descrizione fisica può servirsi di spazi con dimensione sia minore che
maggiore di 3.
4
5. Punti propri e impropri.
Quanto precedentemente detto dovrebbe consentirci di accettare un’ulteriore estensione del
concetto di piano cartesiano che, sia pur con qualche lieve aggravio di operazioni algebriche,
vedremo può risultare fruttuoso consentendoci di descrivere cose non descrivibili se ci
limitiamo all’uso delle normali coordinate cartesiane.
Quello che vogliamo fare è associare ad una terna ordinata (x’, y’, t’) di numeri reali, non tutti
nulli, un punto del piano e vedere se è possibile il viceversa.
Supponiamo, in primo luogo, che sia t’ 0. In questo caso, associamo alla terna ordinata (x’,
y’, t’) la coppia ordinata (x, y) così definita:
[1]
x
y
x'
t' (con t' 0)
y'
t'
.
Osserviamo che se alla terna (x’, y’, t’) si associa, mediante le [1], la coppia (x, y), anche alla
terna (k x’, k y’, k t’), k 0, si associa lo stesse coppia (x, y) e quindi lo stesso punto del
piano, perché:
x
y
k x'
k t'
k y'
k t'
x'
t'
y' (con t' 0)
t'
.
Ovviamente, ad ogni punto del piano (x, y) si può associare una qualsiasi terna ordinata del
tipo (k x’, k y’, k t’), k, t’ 0.
Ovviamente, se t’ = 0, non hanno senso le [1] e quindi alla terna (x’, y’, t’) non può essere
associata nessuna coppia ordinata del tipo (x, y), ossia alcun punto del piano.
Tuttavia conveniamo di chiamare punti impropri quelli definiti da terne ordinate di numeri
non tutti nulli del tipo: (x’, y’, 0). Le terne ordinate di numeri non tutti nulli con t’ 0 le
chiameremo punti propri.
Con le ordinarie coordinate cartesiane la coppia ordinata (x, y) di numeri reali diventa
sinonimo di punto, per le terne non è la stessa cosa.
Diremo che due terne ordinate di numeri non tutti nulli (x 1’, y1’, t1’) e (x2’, y2’, t2’), ossia due
elementi di - (0, 0, 0), sono equivalenti se esiste un k 0 tale che (kx1’, ky1’,
kt1’) = (x2’, y2’, t2’).
È facile verificare che questa è una relazione di equivalenza perché gode delle proprietà:
1. (x’, y’, t’) R (x’, y’, t’) [riflessiva];
2. (x1’, y1’, t1’) R (x2’, y2’, t2’) (x2’, y2’, t2’) R (x1’, y1’, t1’) [simmetrica];
3. (x1’, y1’, t1’) R (x2’, y2’, t2’) (x2’, y2’, t2’) R (x3’, y3’, t3’) (x1’, y1’, t1’) R (x3’, y3’,
t3’) [transitiva].
Dimostrazione.
Per dimostrare la (1) basta prendere k =1.
Per le ipotesi della (2) k 0 : (kx1’, ky1’, kt1’) = (x2’, y2’, t2’). Si deve provare che h
0 : (hx2’, hy2’, ht2’) = (x1’, y1’, t1’). Basta prendere h = 1/k.
5
Per le ipotesi della (3) h 0 : (hx1’, hy1’, ht1’) = (x2’, y2’, t2’) e p 0 : (px2’, py2’,
pt2’) = (x3’, y3’, t3’).
Occorre dimostrare che k 0 : (kx1’, ky1’, kt1’) = (x3’, y3’, t3’).
Basta quindi prendere k = hp.
Essendo quindi R una relazione di equivalenza, essa induce in - (0, 0, 0) una
partizione in classi di equivalenza.
L’insieme quoziente - (0, 0, 0) / R è l’insieme dei punti del piano (propri e
impropri).
Il luogo dei punti impropri ha, ovviamente, equazione t’= 0. Trattandosi di un’equazione di 1°
grado nelle incognite x’, y’ e t’, analogamente a quanto si fa nell’usuale geometria analitica, il
luogo dei punti impropri è considerato una retta che prende il nome di retta impropria.
6. Coordinate omogenee.
Considerato il piano cartesiano allargato con i punti impropri, ossia l’insieme quoziente
- (0, 0, 0) / R, il sistema di coordinate così introdotte si chiamano coordinate
cartesiane omogenee perché ogni equazione algebrica di qualsiasi grado diventa omogenea
nelle tre variabili x’, y’ e t’.
Ad esempio, una retta, nell’ordinario piano cartesiano, è rappresentata da un’equazione di 1°
grado del tipo:
a x + b y + c = 0.
Utilizzando le [1] del precedente paragrafo, per passare in coordinate omogenee, si ha:
a
x'
y'
b c0
t'
t'
.
Moltiplicando tutto per t’, si ottiene ancora:
a x’ + b y’ + c t’ = 0,
che è un’equazione di 1° grado omogenea nelle variabili x’, y’ e t’.
Una conica, nell’ordinario piano cartesiano è rappresentata da un’equazione di 2° grado in x e
y del tipo:
a x 2 + b xy + c y 2 + d x + e y + f = 0.
Con ragionamento analogo a quello fatto per le rette, in coordinate omogenee, l’equazione di
una generica conica diviene:
a x’ 2 + b x’y’ + c y’ 2 + d x’t’ + e y’t’ + f t’ 2 = 0,
che è un’equazione omogenea di 2° grado nelle variabili x’, y’ e t’.
Teorema: Due rette parallele hanno lo stesso punto improprio.
Siano r ed s due tette parallele di equazione:
6
(r) y = m x + q,
(s) y = m x + p.
In coordinate omogenee le equazioni diventano:
(r) y’ = m x’ + q t’,
(s) y’ = m x’ + p t’.
Per individuare il punto improprio di r risolviamo il sistema:
y' m x' q t'
t' 0
Sostituendo si ha:
y' m x'
t' 0
Il sistema ha due equazioni e tre incognite, quindi ad una delle incognite è possibile dare un
valore arbitrario per determinare una delle infinite soluzioni che esso ammette. Si ricordi che
in coordinate omogenee il punto non è rappresentato da un’unica terna, ma da una delle
infinite terne fra esse equivalenti.
Sia, ad esempio, x’ = 1; da cui:
x' 1
y' m
t' 0
Pertanto la retta r ha punto improprio (1, m, 0) che, com’è banale verificare, è punto
improprio pure della retta s.
Resta da provare che quanto detto per le rette del tipo y = mx + q, vale anche per le rette
parallele all’asse y che non sono del tipo x = p. In questo caso è immediato verificare che il
loro punto improprio è (0, 1, 0).
7. Punti impropri delle coniche e invariante ortogonale .
Consideriamo delle coniche in forma canonica e vediamo di determinate i loro punti impropri.
In primo luogo consideriamo l’ellisse che in forma canonica ha equazione:
x 2 y2
1
a 2 b2
.
L’equazione può essere scritta, in coordinate omogenee:
b 2 x’ 2 + a 2 y’ 2 = a 2 b 2 t’ 2
(equazione ridotta).
Per determinare i punti impropri poniamo t’ = 0 per cui si ha:
7
b 2 x’ 2 + a 2 y’ 2 = 0.
Poiché una somma di quadrati non può mai essere nulla, se ne deduce che l’ellisse è priva di
punti impropri. In altre parole possiamo dire che la retta impropria è esterna all’ellisse.
Quanto detto per l’ellisse vale pure per la circonferenza che è una particolare ellisse in cui a
= b = r.
L’iperbole canonica in coordinate omogenee ha equazione:
b 2 x’ 2 - a 2 y’ 2 = a 2 b 2 t’ 2
(equazione ridotta).
Ponendo quest’ultima equazione a sistema con t’ = 0, si ha:
b 2 x’ 2 - a 2 y’ 2 = 0,
ossia:
x' 2 a 2
y'2 b 2 ,
da cui:
x'
a
y'
b
Pertanto i punti impropri dell’iperbole sono: (a, b, 0) e (a, -b, 0). Pertanto la retta impropria è
una secante dell’iperbole.
Si verifica facilmente che i punti impropri dell’iperbole sono i punti impropri dei suoi asintoti
che hanno equazioni:
y
b
x
a .
Per concludere determiniamo i punti impropri della parabola in forma canonica:
y 2 = 2 p x.
L’equazione in coordinate omogenee è:
y’ 2 = 2 p x’ t’.
Imponendo t’ = 0, si ha:
y’ 2 = 0;
Pertanto la parabola ha come punto improprio il punto (1, 0, 0) come punto doppio. In questo
caso, quindi, la retta impropria è tangente alla parabola.
Questo punto improprio appartiene anche all’asse x che è asse di simmetria della parabola
canonica.
8
Questo comportamento della retta impropria rispetto ad una conica (essere esterna, secante o
tangente) costituisce un invariante per le coniche, nel senso che, se si opera con un qualsiasi
cambiamento del sistema di riferimento, il comportamento della retta impropria, rispetto alla
conica considerata, non cambia rimanendo esterna per tutte le ellissi o circonferenze, secante
per tutte le iperboli e tangente per tutte le parabole.
Come si è visto una generica conica in coordinate omogenee ha equazione:
a x’ 2 + b x’y’ + c y’ 2 + d x’t’ + e y’t’ + f t’ 2 = 0,
Per determinare i suoi punti impropri, poniamo t’ = 0, da cui:
a x’ 2 + b x’y’ + c y’ 2 = 0.
Dividendo tutto per y’ 2, si ha:
2
[2]
x'
x'
a b c 0
y'
y'
.
Questa è un’equazione di secondo grado in x’/y’ il cui discriminante è = b 2 – 4 ac. Pertanto
si hanno i casi:
> 0 la [2] ammette due radici reali e distinte, pertanto la conica è un’iperbole.
= 0 la [2] ammette due radici reali e coincidenti, pertanto la conica è una parabola.
< 0 la [2] ammette due radici complesse e coniugate, pertanto la conica è un’ellisse.
Il discriminante è un invariante ortogonale della conica perché non muta il valore se si
trasforma la conica mediante una qualsiasi isometria (traslazione, rotazione, simmetria).
8. Discriminante di una conica.
Se scriviamo l’equazione di una generica conica nella forma:
a 11 x’ 2 + 2 a 12 x’ y’ + a 22 y’ 2 + 2 a 13 x’ t’ + 2 a 23 y’ t’ + a 33 t’ 2 = 0.
In questo caso i coefficienti sono indicati con a i j . I due indici indicano la variabile per cui si
riferisce il coefficiente: 1 per x’, 2 per y’ e 3 per t’. Indici diversi caratterizzano i termini
misti, che hanno anche il coefficiente moltiplicato per 2, indici uguali se figura una sola
variabile.
Il seguente determinante è detto discriminante della conica:
a 11 a 12
A a 21 a 22
a 31 a 32
a 13
a 23 dove a r c a c r
a 33
Il discriminante della conica è un altro invariante ortogonale come il . Se A 0 la conica
risulta irriducibile, altrimenti è degenere (ossia si spezza in rette reali o complesse).
Un ultimo invariante ortogonale è l’invariante lineare così definito:
9
I = a 11 + a 22.
Per determinare l’equazione canonica di una conica non occorre effettuare traslazioni o
rotazioni, basterà servirsi degli invarianti ortogonali.
8-1. Esempio.
Si voglia studiare la conica di equazione:
3 x 2 – y 2 + 2 y + 1 = 0.
Calcoliamo gli invarianti ortogonali:
3
A 0
0
0
1
1
0
1
1 3
1
1
1
6
1
I=3–1=2
= 12
Si tratta quindi di un’iperbole (essendo > 0) non degenere (essendo A 0).
La forma ridotta dell’iperbole è:
a x 2 + b y 2 + c = 0,
in cui
A = abc; I = a + b;
= - 4 a b.
Determiniamo i coefficienti a, b, c risolvendo il sistema:
4 ab 12
a b 2
a b c 6
da cui
ab - 3
a b 2
3 c 6
e anche
10
ab - 3
a b 2
c 2
Le prime due equazioni indicano che a e b sono due numeri la cui somma è 2 ed il prodotto è
–3, pertanto la soluzione del sistema è:
a 3
b - 1
c 2
oppure
a - 1
b 3
c 2
.
La conica ha pertanto forma ridotta:
3 x 2 – y 2 + 2 = 0, oppure
- x 2 + 3 y 2 + 2 = 0.
Pertanto la forma canonica è:
3 x 2 – y 2 = - 2;
3 2 1 2
x y 1
2
2
,
x2
y2
1
2
2
3
.
Iperbole con asse principale l’asse Y.
Oppure, da x 2 - 3 y 2 = 2 , si ottiene
x2
y2
1
2
2
3
,
che è l’iperbole ad asse principale l’asse X.
8-2. Esempio
Si studi la conica di equazione:
x y – x – 2 = 0.
In questo caso si ha:
11
1
2
0
1
A
2
1
2
-
1
2
0
0
0
-2
1
1
2
2
0
1
1
2 ;
2
-2
-
I = 0;
= 1.
Si tratta ancora di un’iperbole non degenere. La sua forma ridotta si ottiene risolvendo il
sistema:
4 ab 1
a b 0
a b c 1
2
che ammette le due soluzioni:
1
a 2
1
b .
2
c - 2
Si tratta quindi dell’iperbole equilatera x 2 – y 2 = 4 , oppure y 2 – x 2 = 4 .
8-3. Esempio.
Sia data la conica di equazione:
3 x 2 – x – y = 0,
per essa si ha:
3
A
0
0
-
1
2
0
-
1
2
1
2
1
1 3
2
2 1
2
0
-
0
1
2
3
;
4
I = 3;
12
= 0.
Si tratta pertanto di una parabola non degenere la cui forma ridotta può essere del tipo:
a y 2 + b x = 0,
dove
0
0
b
2
A 0
a
0
b
2
0
0
a b2
,
4
I=a
= 0.
Pertanto, risolvendo il sistema:
a 3
2
a b 3
4
4
si hanno le soluzioni:
a 3
b 1
ossia le forme ridotte sono:
3 y 2 x = 0,
da cui otteniamo: x = 3 y 2.
Analogamente si può procedere per cercare forme ridotte del tipo: a x 2 + b y = 0 (parabole ad
asse di simmetria coincidente con l’asse Y).
9. Fasci di coniche.
Siano f(x, y) = 0 e g(x, y) = 0 due qualsiasi coniche degeneri o non degeneri. Effettuare una
loro combinazione lineare, mediante due parametri non entrambi nulli e , vuol dire
considerare un’equazione del tipo:
[3]
f(x, y) + g(x, y) = 0.
13
Ad ogni coppia ordinata (, ) -(0, 0) corrisponde una conica, l’equazione [3] è
quella del fascio di coniche individuato dalle coniche f e g.
Nella pratica lavorare con due parametri è molto scomodo, pertanto si procede come segue.
Supponiamo sia 0, dividendo la [3] per , si ha:
f(x, y)
μ
g(x, y) 0
λ
,
dove, posto k = / , si ha:
[4]
f(x, y) + k g(x, y) = 0.
Per = 0, l’espressione [3] del fascio restituisce la conica di equazione g(x, y) = 0. Scrivendo
il fascio nella forma [4] non c’è nessun valore di k che restituisce la conica g. Questa conica si
dice che si ottiene per k (leggi: k tendente ad infinito).
Convenendo di indicare con C0 la conica che si ottiene per k = 0, C1 la conica che si ottiene
per k = 1, e così via; la conica g, mancante dal fascio quando è espresso mediante
l’espressione [4], viene indicata con C (leggi: c con infinito).
Gli eventuali punti comuni alle due coniche f e g, generatrici del fascio, sono comuni a tutte le
coniche del fascio e sono detti punti base.
9-1. Esercizio.
Dato il fascio di coniche la cui generica equazione è:
(k – 1) x 2 + k y 2 – k x = 0,
determinare:
i valori di k per cui si hanno ellissi, parabole ed iperboli;
l’eventuale circonferenza del fascio;
l’eventuale iperbole equilatera del fascio;
le parabole del fascio;
la C del fascio;
i punti base del fascio.
Per determinare la natura delle coniche calcoliamo = - 4 k (k –1) e vediamo quale segni
assume al variare di k.
Essendo 0 per 0 k 1, si ha:
per k < 0 ellissi;
per k = 0 parabola;
per 0 < k < 1 iperboli;
per k = 1 parabola;
per k > 1 ellissi.
Per ottenere la circonferenza dobbiamo imporre a 11 = a 22, essendo a 12 = 0. Nel nostro caso
occorre porre: (k – 1) = k. Questa equazione non ha soluzioni, quindi il fascio è privo di
circonferenza al variare di k.
14
Per ottenere l’iperbole equilatera dobbiamo imporre a 11 = -a 22, essendo a 12 = 0. Nel nostro
caso occorre porre: (k -1) = - k. Quest’equazione ammette soluzione k = ½. Sostituendo
questo valore nell’equazione del fascio otteniamo:
1 2 1 2 1
1 x y x 0
2
2
2
,
pertanto l’iperbole è:
x 2 – y 2 + x = 0.
Mancando il termine di secondo grado misto in xy, si tratta di un’iperbole traslata rispetto alla
forma canonica. Per individuare il centro di simmetria vediamo di riscriverla come differenza
di quadrati. Questo è fattibile considerando il termine di primo grado in x come il doppio
prodotto nello sviluppo del quadrato di un binomio, ossia:
2
x x
1
1
2
y
4
4,
per ottenere un trinomio che risulti quadrato di un binomio, a primo membro è stato aggiunto
il termine ¼ e, per non alterare l’equazione, ¼ è stato aggiunto pure al secondo membro.
L’equazione diviene:
2
1
2 1
2
x y
2
4.
Questa forma ci mostra che con la posizione:
1
X x 2
Y y
[5]
l’iperbole assume la forma canonica
X2 Y2
1
4.
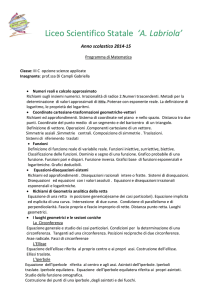
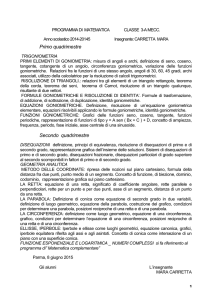
Poiché la [5] è una traslazione che porta l’origine in (- ½ , 0), il centro di simmetria è appunto
questo e l’iperbole ha forma come in figura.
15
1
0.5
0
-1.5
-1
-0.5
0
0.5
1
-0.5
-1
Figura 2
Le coordinate dei vertici si possono ottenere intersecando l’iperbole col suo asse principale,
che nel nostro caso coincide con l’asse X.
Il sistema
x 2 y 2 x 0
y 0
ammette soluzioni (-1, 0) e (0, 0) che sono i vertici della nostra iperbole.
Gli asintoti sono le rette passanti per il centro di simmetria e per i punti impropri
dell’iperbole. Nel nostro caso basta tener conto che si tratta di un’iperbole equilatera traslata,
per cui gli asintoti sono paralleli alle bisettrici dei quadranti, ossia hanno equazioni:
yx
1
2
e
yx
1
2.
La prima parabola si ottiene per k = 0, da cui si ha x 2 = 0 che è una conica degenere che si
spezza nella retta x = 0 contata due volte (asse Y).
La seconda parabola si ottiene per k = 1, da cui si ha y 2 – x = 0, ossia x = y 2 che è una
parabola canonica con vertice nell’origine, asse di simmetria l’asse X e concavità rivolta
verso destra.
Per ottenere la C del fascio, nella sua equazione, mettiamo in evidenza il k fra i termini che
lo contengono:
k (x 2 + y 2 – x) – x 2 = 0.
Uguagliando a zero il fattore che moltiplica k otteniamo la conica cercata:
x2 + y2 – x = 0
che è una circonferenza di centro (½, 0) e raggio ½.
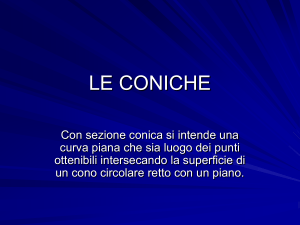
I punti base si ottengono come intersezione di due qualsiasi coniche del fascio. Nel nostro
caso possiamo considerare le due parabole, per cui:
16
x y 2
x 0
otteniamo l’unico punto base (0, 0) contato due volte. Si tratta quindi di coniche tutte tangenti
fra loro nell’origine.
1
0.5
0
-1.5
-1
-0.5
0
0.5
1
1.5
-0.5
-1
Figura 3
In figura sono mostrate le coniche studiate poste tutte sullo stesso diagramma cartesiano.
10. Polarità rispetto ad una conica.
Sia data una conica non degenere (A 0) di equazione:
a 11 x’ 2 + 2 a 12 x’ y’ + a 22 y’ 2 + 2 a 13 x’ t’ + 2 a 23 y’ t’ + a 33 t’ 2 = 0,
e un punto P0 (x’0, y’0, t’0), si chiama polare del punto P0 rispetto alla conica la retta di
equazione:
[6]
(a 11 x’0 + a 12 y’0 + a 13 t’0) x’ +
+ (a 21 x’0 + a 22 y’0 + a 23 t’0) y’ +
+ (a 31 x’0 + a 32 y’0 + a 33 t’0) t’ = 0
il punto P0 è detto polo della retta [6].
La biiezione che associa ad ogni punto P del piano la retta polare rispetto ad una conica
irriducibile (A 0) si chiama polarità.
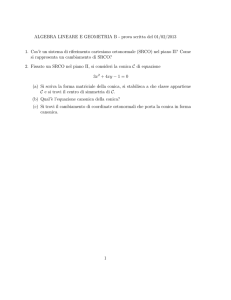
Se il punto P0 appartiene alla conica, allora la polare [6] è la tangente alla conica in quel suo
punto.
Se P0 è un punto esterno alla conica, allora le tangenti alla conica, condotte da P0, toccano la
conica nei due punti comuni alla conica ed alla polare (vedi figura).
17
P0
polare
Figura 4
La polare di un fuoco si chiama direttrice della conica (già nota per le parabole).
Il polo della retta impropria è il centro della conica. Ellisse ed iperbole hanno un centro
proprio che è centro di simmetria, la parabola è priva di centro proprio.
10-1. Esempio.
Data la parabola di equazione y = 2 x 2, avente fuoco F (0, 1/8) e direttrice y = -1/8,
determiniamo la polare del fuoco F rispetto alla parabola data e verifichiamo che coincide con
la direttrice.
Per avere facilmente sott’occhio i coefficienti della conica, scriviamo il suo discriminante A.
A
2
0
0
0
0
1
2
0
1
2
0
In coordinate omogenee il fuoco ha coordinate (0, 1/8, 1), pertanto la polare di F è:
(20 + 01/8 + 01) x’ + (00 + 01/8 –1/21) y’ + (00 –1/21/8 + 01) t’ = 0,
ossia
-1/2 y’ – 1/16 t’ = 0,
che coincide, appunto, con la direttrice.
10-2. Esempio.
Riconsideriamo l’iperbole equilatera dell’esercizio 9-1 e determiniamo il suo centro di
simmetria come polo della retta impropria t’ = 0.
L’equazione della conica è x 2 – y 2 + x = 0 e il suo discriminante, usato come matrice guida
per la determinazione dei coefficienti, è dato da:
18
1
A 0
1
2
0
1
2
1
0 .
0
0
La polare rispetto ad un punto P0 (x’0, y’0, t’0) ha equazione:
(x’0 + t’0/2) x’ – y’0 y’ + x’0/2 t’ = 0.
Imponiamo che questa equazione sia identicamente uguale alla t’ = 0. Per il principio
d’identità dei polinomi si deve avere:
t'0
x' 0 2 0
,
y'0 0
x' 0 1
2
pertanto le coordinate sono: P0 (2, 0, -4). In coordinate non omogenee le coordinate del punto
sono: P0 (-1/2, 0) che, come già visto, è centro di simmetria della conica.
11. Area di un triangolo.
L’area di un triangolo di vertici A (x’1, y’1, t’1), B (x’2, y’2, t’2) e C (x’3, y’3, t’3) è data dalla
formula:
x' 1
1
S
x' 2
2
x' 3
y'1
y'2
t'3
t'1
t'2
t'3 .
Se i punti sono allineati, ovviamente, l’area è nulla.
11-1. Esempio.
Calcolare l’area del triangolo di vertici A(-1, 0), B (3, 0) e C(1, 2). Applicando la formula si
ha:
-1 0 1
1 1
1
1
S
3 0 1 ( 2)
4
3 1
2
2
1 2 1
.
Risultato conseguibile anche per altre vie.
19
12. Trasformazioni affini.
In coordinate cartesiane non omogenee l’affinità è una trasformazione geometrica retta da
un’equazione del tipo:
X a 11 x a 12 y a 13
Y a 21 x a 22 y a 23 ,
con
δ
a 11 a 12
0
a 21 a 22
,
essendo = S’/S il rapporto di affinità, ossia il rapporto fra l’area S’ di una figura trasformata
e l’area della figura di partenza S.
In coordinate omogenee l’equazione diventa:
X' a'11 x' a'12 y' a'13 t'
Y' a' 21 x' a' 22 y' a' 23 t'
T' a' t'
33
,
[7]
dove a’ 33 0 ed il rapporto d’affinità è dato da:
a'11 a'12 a'13
1
δ 3 a' 21 a' 22 a' 23 0
a'33
0
0 a'33
.
È facile verificare che le [7] sono tali da trasformare punti propri in punti propri e punti
impropri in punti impropri; ossia per affinità non può accadere che un punto improprio si
trasformi in punto proprio e viceversa.
Questo equivale ad affermare che rette parallele si trasformano in rette parallele perché,
essendo il loro punto comune improprio, il punto comune delle trasformate rimane improprio
e quindi le trasformate continuano ad essere parallele. Quanto detto si esprime dicendo che
l’affinità è una trasformazione che conserva il parallelismo tra rette.
Anche le coniche non mutano la loro natura, ossia mantenendo il loro numero di punti
impropri, le ellissi si trasformano in ellissi (o al più circonferenze), le parabole si trasformano
in parabole e le iperboli in iperboli.
Poiché l’affinità trasforma rette in rette, ne segue che se una conica è degenere si trasformerà
in una conica degenere, se è non degenere continuerà a rimanere tale.
12-1. Esercizio.
Determinare il rapporto d’affinità della seguente trasformazione e scriverla in coordinate
non omogenee.
()
X' x' 2 y' 3 t'
Y' - x' 3 y'
T' 2 t'
20
Il rapporto d’affinità è dato da:
1 2
1 -2 3 2
1 3
1
32 1
δ 3 -1 3 0
3
4
4
2
2
0 0 2
.
Per ottenere la trasformazione in coordinate non omogenee, dividiamo membro a membro le
prime due equazioni della per la terza e otteniamo:
X' 1 x' y' 3
T' 2 t' t' 2
Y'
1 x' 3 y'
2 t' 2 t' ,
T'
ossia
1
3
X 2 x y 2
1
3
Y x y
2
2 ,
dove
1
δ 2
1
2
-1
3
2
3 1 1
4 2 4
.
Ovviamente il valore di è identico a quello ricavato prima.
13. Conclusioni.
L’introduzione delle coordinate omogenee in geometria analitica non serve solo a
semplificare dei calcoli o scoprire nuove proprietà delle coniche, ma ad aprire le porte a
trasformazioni geometriche diverse dalle affinità in cui punti impropri possono divenire
propri e viceversa.
La trattazione di queste trasformazioni va ben oltre i limiti di un lavoro indirizzato a studenti
di scuola secondaria superiore. Tuttavia lo studio della prospettiva in disegno lascia intuire
che i punti di fuga, verso cui sembrano convergere rette parallele, altri non sono che punti
impropri che, per effetto di una trasformazione proiettiva, diventano punti propri.
Ettore Limoli
21