Università degli Studi di Roma Tor Vergata
Facoltà di Ingegneria
Corso di Laurea Specialistica in Ingegneria delle
Telecomunicazioni
Anno accademico 2008-09
Appunti dalle lezioni di Microonde
di P. Ferrazzoli
1
Capitolo 1
RICHIAMI DI CAMPI
ELETTROMAGNETICI
1.1
Premessa
In questo capitolo si richiamano la trattazione relativa al potenziale vettore e il teorema di reciprocità.
In questi richiami, come in tutto il resto del corso, si dànno per scontate le definizioni e le notazioni
del corso di Microonde 1.
1.2
Il potenziale vettore
Consideriamo una regione di spazio priva di cariche magnetiche (ρm = 0). Si avrà:
∇·B=0
(1.1)
B=∇×A
(1.2)
Quindi:
dove A è il potenziale vettore magnetico . Usando l’equazione di Maxwell e la relazione costitutiva
relativa al campo magnetico, e sviluppando l’operatore ∇ × ∇×, si ha:
∇2 A + k 2 A = −µJ
(1.3)
∇∇ · A
(1.4)
jωµ
Analogamente, se la densità di carica elettrica ρ = 0, si definisce un potenziale vettore elettrico F e
si procede per dualità.
Supponiamo ora di avere un’onda TM che si propaga in una struttura guidante rettilinea, a
distanza dalle sorgenti. Si ha:
∇2 A + k 2 A = 0
(1.5)
E = −jωA +
Assumendo la direzione di propagazione parallela all’asse z si avrà:
Per la 1.2:
Hz = 0
(1.6)
1
z◦ · ( ∇ × A) = 0
µ
(1.7)
2
Quindi: A = Az z◦ . Il potenziale vettore magnetico sarà longitudinale. Inoltre, per l’ ipotesi di
separabilità, si può porre:
A = z◦ ψ(x, y) · f (z)
(1.8)
Ponendo k 2 = kc2 + β 2 si avrà :
∇2t ψ + kc2 ψ = 0
δ 2 f (z)
+ β 2 f (z) = 0
δz 2
Assumendo di avere propagazione nel verso delle z positive:
f (z) = exp(−jβz)
δAz
= −jβAz
δz
δ 2 Az
= −β 2 Az
δz 2
Per la 1.4
E = −jωAz z◦ +
∇∇ · (Az z◦ )
jωµ
Poichè:
∇ · (Az z◦ ) =
(1.11)
(1.12)
(1.13)
(1.14)
(1.15)
δ
δz
(1.16)
∇ = ∇ t + z◦
E = −jωAz z◦ +
(1.10)
δAz
δz
e
dalla 1.14 si ha:
(1.9)
1
δAz
δ 2 Az
[∇t
+ z◦ 2 ]
jωµ
δz
δz
(1.17)
Quindi Az sarà proporzionale ad Ez :
Ez = Az [−
Az kc2
β2
− jω] =
jωµ
jωµ
Ovvero:
(1.18)
ψkc2
jωµ
(1.19)
−jβ∇t Az
β∇t Az
jβ
=−
= − 2 ∇t Ez
jωµ
ωµ
kc
(1.20)
jβ
∇t ez
kc2
(1.21)
ez =
Per le componenti trasverse si ha:
Et =
Ovvero:
e=−
Inoltre:
1
∇ t ψ × z◦
ω
k
∇t × (ψz◦ ) =
= − e × z◦ = Y z◦ × e
(1.22)
µ
µ
β
β
Confrontando le 1.22 e 1.21 con le equazioni ottenute a partire dal campo ez (corso di Microonde 1)
si nota come, nel caso di onde TM, la trattazione basata sul potenziale vettore magnetico conduce
agli stessi risultati di quella basata sul campo elettrico longitudinale. Analoghi risultati, nel caso di
assenza di cariche elettriche, possono essere ottenuti per le onde TE utilizzando il potenziale vettore
elettrico.
h=
3
1.3
Teorema di reciprocità
Sia dato (Fig 1.1) un volume V delimitato da una superficie chiusa S contenente materiale isotropo.
Si abbiano due distribuzioni indipendenti di correnti impresse J1 , Jm1 e J2 , Jm2 . Siano E1 , H1 e
E2 , H2 i campi prodotti dalle due distribuzioni di correnti impresse, rispettivamente. Si dimostra
che:
I
S
(E1 × H2 − E2 × H1 ) · ndS =
Z
V
(E2 · J1 − H2 · Jm1 )dV −
Z
V
(E1 · J2 − H1 · Jm2 )dV
Il primo membro è nullo se:
• le due distribuzioni di corrente sono ambedue esterne al volume V;
• le due distribuzioni di corrente sono ambedue interne al volume V;
• la superficie S è interamente costituita da materiale con conducibilità infinita.
4
(1.23)
Capitolo 2
PROPAGAZIONE GUIDATA IN
STRUTTURE PLANARI
Strutture guidanti di più recente sviluppo, dette “planari”, sono caratterizzate da sezioni di piccole
dimensioni, con conduttori costituiti da sottili lamine. Alcune di esse (p. es. stripline, linee accoppiate) sono compatibili con la propagazione di onde TEM e rappresentabili con la teoria delle linee di
trasmissione. Tuttavia, proprio la geometria laminare della struttura rende non semplice il calcolo
della funzione potenziale scalare e, a partire da questo, dei vari parametri tra cui l’ impedenza caratteristica. Vedremo come il problema può essere risolto utilizzando opportune tecniche. La teoria
che esporremo è semplificata: considera infinitesimo lo spessore delle lamine, trascura le perdite e
gli effetti di bordo. Per le strutture compatibili con la propagazione di onde TEM, utilizzeremo la
tecnica delle trasformazioni conformi. Si basa sui seguenti concetti:
• È assegnata la struttura nel piano xy. La funzione potenziale scalare Φ(x, y) , incognita,
assumerà valori Φ1 e Φ2 sui due conduttori.
• Si effettua una trasformazione:
u = u(x, y)
v = v(x, y)
(2.1)
tale da definire un sistema di coordinate curvilinee ortogonali.
• Si ridisegnano sul piano u, v i luoghi a Φ = Φ1 e Φ = Φ2 .
• Se si è opportunamente scelta la trasformazione:
– il calcolo della Φ(u, v) e della capacità per unità di lunghezza C nel piano uv saranno
agevoli
– la capacità per unità di lunghezza C assumerà lo stesso valore di quella della struttura di
partenza nel piano xy.
Vediamo ora, in pratica, quali sono le trasformazioni che si scelgono (cioè le trasformazioni
conformi), premettendo brevi richiami matematici.
5
2.1
Le trasformazioni conformi
Sia data una struttura definita nel piano xy. Si consideri la variabile complessa Z = x + jy e una
trasformazione:
W = F (Z)
(2.2)
con W = u + jv.
La funzione F (Z) è detta “analitica” se dW/dZ ha valore unico in ogni punto del piano xy. Esiste
il seguente teorema : condizione necessaria e sufficiente perchè una funzione complessa sia analitica
è che soddisfi le condizioni di Cauchy-Rieman:
δv
δu
=
δx
δy
δu
δv
= −
δy
δx
(2.3)
Ne consegue che , essendo:
δu
δu
+ y◦
δx
δy
δv
δv
δu
δu
∇t v = x◦ + y◦
= −x◦ + y◦
δx
δy
δy
δx
∇t u = x◦
(2.4)
(2.5)
si avrà:
∇t u · ∇t v = 0
(2.6)
Le linee u = cost., v = cost. sono ortogonali tra loro. La trasformazione 2.2 conserva pertanto
le proprietà angolari ed è detta conforme. Le variabili u e v definiscono un sistema di coordinate
curvilinee ortogonali. Si definiscono i parametri metrici:
ds1
du
ds2
=
dv
h1 =
h2
(2.7)
Sono gli spostamenti nel piano xy dovuti a variazioni du o dv rapportati alle variazioni stesse. Si
dimostra che:
1
δu
δu
= ( )2 + ( )2
2
h1
δx
δy
1
δv
δv
= ( )2 + ( )2
2
h2
δx
δy
(2.8)
Esempi
• Per la trasformazione
u = x
v = y
si ha : h1 = h2 = 1
6
(2.9)
• Per la trasformazione
q
u =
x2 + y 2
v = arctan(y/x)
(2.10)
si ha : h1 = 1, h2 = u
Questo risultato si ottiene analiticamente dalle 2.8. Può essere semplicemente interpretato
tenendo conto che le 2.10 definiscono un sistema di coordinate cilindriche (generalmente indicate
con r e φ) in cui ds1 = du, ds2 = udv.
Sussiste la seguente proprietà fondamentale: se la funzione W(Z) è analitica, e quindi la trasformazione definita dalla 2.8 è conforme, si ha h1 = h2 .
Consideriamo una funzione Φ(x, y). Siano [∇t Φ]Z e [∇2t Φ]Z gli operatori gradiente e laplaciano
definiti nel piano xy. Operiamo una trasformazione conforme:
u = u(x, y)
v = v(x, y)
e associamo ad essa un nuovo sistema che abbia u e v come assi. Sul piano uv sarà definita una
Φ(u, v) e i corrispondenti operatori saranno: [∇t Φ]W e [∇2t Φ]W . Ponendo h = h1 = h2 , si avrà, per
le proprietà delle coordinate curvilinee:
[∇t Φ]Z =
δΦ
1 δΦ
1 δΦ
1
δΦ
x◦ +
y◦ =
u◦ +
v◦ = [∇t Φ]W
δx
δy
h1 δu
h2 δv
h
(2.11)
δ2Φ δ2Φ
1 δ h2 δΦ
δ h1 δΦ
1 δ2Φ δ2Φ
1 2
+
=
[
+
]
=
[
+
]
=
[∇ Φ]W
(2.12)
δx2
δy 2
h1 h2 δu h1 δu δv h2 δv
h1 h2 δu2
δv 2
h2 t
Vediamo ora le conseguenze ai fini delle strutture guidanti.
Sia data una struttura avente una sezione nel piano xy del tipo di quella mostrata in Fig. 2.1.
Sia Sz il dominio del piano xy in cui è definita la funzione Φ(x, y). Se si opera una trasformazione
conforme, la funzione Φ(u, v) sarà definita in un dominio Sw del piano uv. Si avranno le seguenti
proprietà:
∇2t Φ(x, y) = 0 =⇒ ∇2t Φ(u, v) = 0
(2.13)
[∇2t Φ]Z =
Z Z
Z Z
∗
Et · Et dydx =
|[∇t Φ]Z |2 dydx =
C=
∗
∗
V◦ V◦
V◦ V◦
SZ
SZ
Z Z
Z Z
1
|[∇t Φ]W |2 hdvhdu =
|[∇t Φ]W |2 dvdu
∗
2
∗
V◦ V◦
V◦ V◦
SW h
SW
(2.14)
Quindi la capacità per unità di lunghezza assumerà lo stesso valore nei due sistemi coordinati.
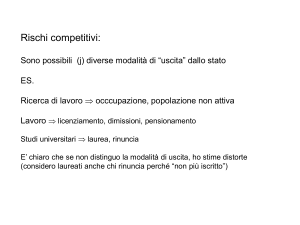
A titolo di esempio, applichiamo i concetti ora esposti al caso particolare della coppia coassiale
(Figura 2.2).
La figura mostra la sezione della struttura e le linee di flusso, che sono radiali per il campo
elettrico, circonferenziali per il campo magnetico. Il problema del calcolo della capacità per unità
di lunghezza e dell’ impedenza caratteristica può essere risolto direttamente, come visto nel corso di
Microonde 1. In alternativa, può essere risolto operando la seguente trasformazione:
W = ln Z
7
(2.15)
8
Poichè
Z = x + jy =
si ha:
W = u + jv =
y
x2 + y 2 exp[j arctan( )]
x
(2.16)
y
1
ln(x2 + y 2 ) + j arctan( )
2
x
(2.17)
q
Quindi la trasformazione è:
1
ln(x2 + y 2 )
2
y
v = arctan( )
x
u =
(2.18)
La trasformazione inversa sarà:
x = exp(u) cos(v)
y = exp(u) sin(v)
(2.19)
Sono soddisfatte le condizioni di Cauchy-Rieman. Infatti:
δu
δv
x
=
= 2
δx
δy
x + y2
δv
y
δu
= −
= 2
δy
δx
x + y2
(2.20)
√
Dalle 2.8, tenendo conto delle 2.20, è agevole verificare che h1 = h2 = x2 + y 2 . Sul piano uv si avrà
il dominio trasformato di Figura 2.3.
Le linee di flusso del campo E saranno linee v = cost. fino al bordo dei conduttori. Le linee
di flusso del campo H saranno u = cost. Si ha un condensatore privo di effetti di bordo. Essendo
9
la trasformazione conforme, dovrà essere: ∇2t Φ(u, v) = 0. La variabile Φ dovrà essere indipendente
da v, variabile linearmente con u, e assumere i valori V◦ e 0, rispettivamente, sui due conduttori.
Questi ultimi saranno segmenti paralleli all’asse delle v, di lunghezza pari a 2π, in corrispondenza a
u = ln a1 e u = ln a2 . Si avrà quindi:
Φ(u, v) = V◦
u − ln a2
ln a1 − ln a2
(2.21)
Inoltre:
V◦
δΦ
= −
δu
ln(a2 /a1 )
δΦ
= 0
δv
(2.22)
La capacità per unità di lunghezza sarà:
Z 2π Z ln a2 δΦ 2
2π
C=
( ) dudv =
∗
V◦ V◦ 0 ln a1 δu
ln(a2 /a1 )
(2.23)
Tenendo conto che , per le onde TEM, µ = LC, l’impedenza caratteristica sarà:
Zc =
Z
Z ln(a2 /a1 )
=
C
2π
(2.24)
Si trova il risultato ottenuto direttamente nel corso di Microonde 1, analizzando la struttura in
coordinate cilindriche.
2.2
Le trasformate di Schwarz - Christoffel
La trasformata di Schwarz-Christoffel (SC) è un caso particolare di trasformazione conforme. È
definita da un’ espressione del tipo 2.2 e tale che:
dZ
= A · (W − W1 )−k1 · (W − W2 )−k2 .....
dW
(2.25)
con k1 , k2 , ..., W1 , W2 , ... costanti reali ed A costante qualsiasi. Si dimostra che, assegnato un
poligono nel piano xy, la trasformata di SC “mappa” l’ area interna al poligono nel semipiano v > 0
e i vertici in punti dell’ asse v = 0. Utilizzeremo due importanti trasformate SC.
1. Funzione seno
W = sin Z = sin x cosh y + j cos x sinh y
(2.26)
È periodica in x.
1
dW
= cos Z = (1 − W 2 ) 2
dZ
1
dZ
= (1 − W 2 )− 2
dW
Effettua la “mappatura” schematizzata in Figura 2.4
10
(2.27)
(2.28)
2. Funzione seno ellittico
W = sn(Z, k)
(2.29)
Il parametro k, detto modulo, è una costante reale con 0 ≤ k ≤ 1. Si ha:
sn(Z, 0) = sin Z
(2.30)
0
Assumono particolare importanza i parametri K e K , dati da:
K =
Z
1
(1 −
0
K
0
=
Z
0
dW
q
W 2 )(1
1
k
− k2W 2)
dW
q
(W 2 − 1)(1 − k 2 W 2 )
(2.31)
0
K e K corrispondono, rispettivamente, a 1/4 della periodicità in x e 1/2 della periodicità in
0
y. Noto il modulo k, è possibile calcolare K e K dalla 2.31 usando gli integrali ellittici. Se
0
interessa soltanto il rapporto K(k)/K (k) sono disponibili formule approssimate. Esistono i
seguenti punti notevoli:
sn(0, k)
sn(±K, k)
0
sn(±K + jK , k)
0
sn(jK , k)
2.3
=
=
=
=
0
±1
±1/k
±∞
Linee accoppiate
Lo schema più semplice di “linee accoppiate” è mostrato in Figura 2.5, in sezione.
11
(2.32)
12
È presente una lamina centrale, sottile e stretta, e due lamine laterali, sottili ma molto più larghe,
complanari ad essa. Supponiamo inizialmente che la struttura sia immersa in aria. Sia 2w la larghezza
della lamina centrale (a potenziale V = V◦ ) ed s la spaziatura tra la lamina centrale e ciascuna delle
lamine laterali (ambedue a potenziale V = 0). Poichè le lamine laterali sono molto più larghe di
quella centrale, possiamo considerarle di lunghezza infinita senza perturbare apprezzabilmente le
linee di flusso dei campi. Riportiamo la struttura sull’ asse u del piano uv (Figura 2.6) applicando un
fattore di scala pari a 1/w. Si può dimostrare che, con una trasformazione inversa Z = sn−1 (W, k),
in cui si scelga k = w/(w + s), si “mappa” la struttura di Figura 2.6 nella struttura del piano xy
disegnata in Figura 2.7. Verifichiamo questa affermazione a posteriori usando le 2.32. Le coordinate
dei punti A,B,C,D,E,F,G nei piani Z e W sono dati dalla tabella 2.1.
Punto Z
A
B
C
D
E
F
G
W
0
jK
0
-K+jK
-K
0
K
0
K+jK
0
jK
-∞
- 1/k = −(w + s)/w
-1
0
1
1/k = (w + s)/w
+∞
Tabella 2.1
Per le proprietà delle trasformate SC, i punti interni al rettangolo di Figura 2.7 corrispondono ai
punti del semipiano superiore di Figura 2.6. Poichè nella struttura di partenza le linee di flusso del
campo elettrico erano dirette da E ad F e da C a B (i segmenti BC ed EF erano pareti magnetiche)
e la trasformazione è conforme, ciò sarà vero anche nella struttura del piano xy di Figura 2.7. Le
pareti BF e CE saranno elettriche, cioè conduttori, mentre le pareti BC ed EF saranno magnetiche.
La capacità per unità di lunghezza di questa struttura immersa in aria sarà data da:
C1◦ = 2◦
K
K0
(2.33)
Per effetto della procedura seguita e delle proprietà della trasformata SC, la struttura di Figura
2.7 corrisponde al semipiano superiore di quella di Figura 2.6. Pertanto la 2.33 dà il contributo di
quelle linee di flusso del campo E che sono presenti nel semipiano superiore di Figura 2.6. Per ovvie
ragioni di simmetria, la capacità per unità di lunghezza totale della struttura di Figura 2.6 sarà:
C◦ = 2C1◦ = 4◦
K
K0
(2.34)
La 2.34 dà anche il valore della capacità per unità di lunghezza della struttura di partenza (Figura
0
2.5). Infatti, tenendo conto che K e K sono funzioni solo del modulo k e che quest’ ultimo è dato
dal rapporto w/(w + s) , il fattore di scala con cui si passa da Figura 2.5 a Figura 2.6 non modifica
il valore di C◦ dato dalla 2.34. L’impedenza caratteristica sarà:
0
◦ Z◦
Z◦ K
Zc◦ =
=
C◦
4 K
(2.35)
Nelle realizzazioni, la struttura sarà come mostrato in Figura 2.8. Il semispazio superiore sarà
13
costituito da aria, ma quello inferiore presenterà un supporto di appoggio sormontato da una lastra
dielettrica (di costante dielettrica relativa r ) di spessore sufficientemente alto da poter approssimare
la lastra stessa con un semispazio infinito. Per calcolare la capacità per unità di lunghezza, si
procederà come segue:
• contributo del semispazio superiore:
C1 = 2◦
K
K0
(2.36)
• contributo del semispazio inferiore:
C2 = 2◦ r
K
K0
• Totale:
C = C1 + C2 = 4◦ (
r + 1 K
) 0
2
K
(2.37)
(2.38)
Definendo una costante dielettrica efficace:
e =
r + 1
2
si ha:
(2.39)
K
(2.40)
K0
Per l’impedenza caratteristica, tenendo conto che l’induttanza per unità di lunghezza è indipendente
dalla costante dielettrica, si ha:
s
0
C◦
Z◦ K
Zc = Zc◦
= √
(2.41)
C
4 e K
C = 4◦ e
14
dove:
s
Zc◦ =
L
C◦
(2.42)
0
Per il calcolo del modulo k in funzione della geometria delle lamine e di K e K in funzione di k
valgono le stesse formule della trattazione per struttura completamente immersa in aria.
2.4
Stripline
Analogamente alle linee accoppiate in aria, la sezione della stripline (Figura 2.9) è costituita da una
lamina centrale, sottile e stretta, e altre due lamine sottili, ma molto più larghe. In questa struttura,
le lamine larghe sono disposte al di sopra e al di sotto di quella stretta, a distanza H da essa.
Anche in questo caso, ipotizziamo che la larghezza delle due lamine esterne possa essere considerata infinita senza perturbare significativamente le linee di flusso dei campi. Assegniamo un
potenziale V = V◦ alla lamina centrale e V = 0 a quelle esterne. La struttura ha evidentemente
due assi di simmetria (tratteggiati in Figura 2.9) sui quali il campo elettrico sarà tangenziale (pareti
magnetiche). Consideriamo 1/4 di struttura, per esempio quella in basso a destra, e riportiamola sul
piano xy dopo aver applicato un fattore di scala π/H. Avremo la struttura di Figura 2.10, con BC
ed ED pareti elettriche, AB e CD pareti magnetiche. Applichiamo la seguente trasformazione SC:
W = sin Z = sin x cosh y + j cos x sinh y
(2.43)
Sul piano uv avremo la struttura di Figura 2.11. Si può dimostrare ora che, con una trasformazione
inversa:
W −1
0
, k)
(2.44)
Z = sn−1 (
2
0
la struttura di Figura 2.11 può essere mappata nella struttura del piano x y 0 di Figura 2.12, purchè
si scelga il modulo k come soluzione della:
2
πw
= − cosh
k
H
(2.45)
1
2
=
2
1 + cosh(πw/H)
cosh (πw/2H)
(2.46)
1−
cioè
k=
Analogamente al caso delle linee accoppiate in aria, effettuiamo la verifica a posteriori usando le
2.32:
Punto Z
A
B
C
D
E
0
(W − 1)/2 W
0
jK
0
-K+jK
-K
0
0
jK
-∞
- 1/k
-1
0
+∞
-∞
1 − 2/k = − cosh(πw/H)
-1
1
+∞
Tabella 2.2
15
16
Poichè tutte le trasformazioni usate sono conformi e conservano le proprietà angolari, anche in Figura
2.12 le pareti AB e CD saranno magnetiche, mentre le pareti BC (con V = V◦ ) e AD (con V = 0)
saranno elettriche. La capacità per unità di lunghezza sarà:
0
C1 = K
K
(2.47)
Tenendo conto che sono state utilizzate trasformazioni conformi e che il fattore di scala applicato
nella Figura 2.10 non altera il valore di k (che dipende solo dal rapporto w/H), la 2.47 dà la capacità
per unità di lunghezza di 1/4 della struttura di Figura 2.9. La capacità per unità di lunghezza totale
sarà:
0
K
(2.48)
C = 4
K
e l’ impedenza caratteristica:
Z
Z K
Zc =
=
(2.49)
C
4 K0
Operativamente, assegnata la struttura, cioè i valori di , w, H, si procede semplicemente con:
• calcolo di k dalla 2.46;
0
• calcolo di K/K usando gli integrali ellittici o formule approssimate;
• calcolo di Zc dalla 2.49.
Quella mostrata in Figura 2.9 è la struttura base. Nelle realizzazioni pratiche si utilizzano spesso
strutture più complesse. Un riepilogo delle realizzazioni fondamentali, con relative linee di flusso
del campo elettrico, è mostrato in Figura 2.13. Nella figura, i simboli E ed H stanno ad indicare la
presenza di pareti elettriche o magnetiche, rispettivamente.
17
Utilizzando trasformazioni conformi si può dimostrare che per le realizzazioni co-planari e broadside possono essere utilizzate formule simili alla 2.49. Detta Zce e Zco le impedenze caratteristiche che
si hanno per modo pari o dispari (rispettivamente) si ha:
Z K(k e )
4 K 0 (k e )
Z K(k o )
=
4 K 0 (k o )
Zce =
Zco
(2.50)
k e e k o sono calcolabili in funzione della geometria della struttura, con formule del tipo della 2.46.
2.5
Guida a piatti piani e paralleli
La guida a piatti piani e paralleli è una struttura guidante ideale (Fig. 2.14). La direzione di
propagazione è parallela all’asse z. Sul piano trasverso la struttura è illimitata in x. Nella direzione
y è delimitata da due conduttori paralleli. Lo spazio interno ad essi, di spessore b, è riempito in
parte di dielettrico, per uno spessore a, ed in parte di aria, per uno spessore c. Nella direzione x, si
potrebbe limitare la struttura con pareti magnetiche poste ad una distanza W dal piano yz senza
perturbare le linee di flusso.
18
Per questa struttura, cerchiamo una soluzione TM. Si ha:
Hz = 0.
Per le condizioni al contorno e le proprietà di simmetria si ha:
Ex = Hy = 0.
Si ha, inoltre:
E = (e + ez ) exp(−jβz)
H = h exp(−jβz)
(2.51)
La struttura, e quindi le equazioni dei campi, sono indipendenti da x. L’equazione di Helmotz per i
modi TM dà:
∇2t ez + kc2 ez = 0
(2.52)
Si ha, inoltre:
e=−
jβ
∇t ez
kc2
h = Yw z◦ × e = −
jβ
Yw z◦ × ∇t ez
kc2
(2.53)
Per l‘indipendenza da x, si ottiene:
d2 ez
+ kc2 ez = 0
2
dy
Si ottiene inoltre, tenendo conto che z◦ × y◦ = −x◦ :
jβ dez
kc2 dy
jβ dez
hx = 2 Yw
kc
dy
(2.54)
ey = −
19
(2.55)
Sul piano y = a devono essere soddisfatte le condizioni di continuità: il valore di β per y < a
deve essere uguale al valore di β per y > a. Inoltre, β sarà compreso tra il valore che si avrebbe per
a = 0 e il valore che si avrebbe per a = c:
√
k◦ < β < k◦ r
(2.56)
Si hanno quindi le seguenti relazioni:
• Regione aria (y > a):
kc2 = k◦2 − β 2 = p2
(2.57)
β
1
= Z◦
Yw◦
k◦
(2.58)
Zw◦ =
• Regione dielettrico (y < a):
kc2 = k 2 − β 2 = l2
Zw =
(2.59)
1
Zw◦
β
=
= Z
Yw
r
k
(2.60)
Dovrà quindi valere la:
β 2 = k◦2 − p2 = k 2 − l2 = r k◦2 − l2
(2.61)
Troviamo cosı̀ una prima relazione per l e p:
l2 − p2 = (r − 1)k◦2
(2.62)
Il campo ez dovrà soddisfare le:
d2 ez
+ l2 ez = 0 (0 ≤ y ≤ a)
dy 2
d2 ez
+ p2 ez = 0 (a < y ≤ b)
dy 2
(2.63)
Dovranno inoltre valere le seguenti condizioni al contorno:
ez (0) = ez (b) = 0
ez (a− ) = ez (a+ )
(2.64)
(2.65)
r dez 1 dez hx (a ) = hx (a ) =⇒ 2
=
l dy y=a−
p2 dy y=a+
−
+
(2.66)
Dalla 2.64, unitamente all’equazione di Helmotz, si ha:
ez (y) =
C1 sin(ly)
(0 ≤ y ≤ a)
ez (y) = C2 sin[p(b − y)] (a < y ≤ b)
(2.67)
(2.68)
C1 sin(la) = C2 sin[p(b − a)] = C2 sin(pc)
(2.69)
r
1
C1 cos(la) = − C2 cos(pc)
l
p
(2.70)
Tenendo conto della 2.65:
Dalla 2.66:
20
Dividendo membro a membro la 2.69 per la 2.70:
l tan(la) = −r p tan(pc)
D’altra parte è:
β=
q
k◦2 − p2 =
√
k 2 − l2
(2.71)
(2.72)
La condizione 2.56 è soddisfatta solo se:
p2 < 0 → p = jp◦
l2 > 0 → l = l◦
(2.73)
Si ottengono quindi le seguenti due equazioni nelle incognite l◦ e p◦ .
l◦ tan(l◦ a) = r p◦ tanh(p◦ c)
l◦2 + p2◦ = (r − 1)k◦2
(2.74)
(2.75)
Non esistono soluzioni generali, ma solo soluzioni asintotiche, valide per bassa frequenza (k◦ → 0,
l◦ → 0, p◦ → 0) ed alta frequenza (k◦ → ∞, l◦ → ∞, p◦ → ∞), rispettivamente.
2.5.1
Approssimazione di bassa frequenza
A bassa frequenza si ha:
tan(l◦ a) ' l◦ a
tanh(p◦ c) ' p◦ c
(2.76)
l◦2 a = r p2◦ c
(2.77)
Quindi per la 2.74:
Sostituendo l◦2 nella 2.75:
(r − 1)k◦2 − p2◦ =
r p2◦ c
a
(2.78)
Quindi:
p2◦ =
(r − 1)k◦2 a
a + r c
(2.79)
r b
a + r c
(2.80)
Definendo una costante dielettrica efficace:
e =
si ha:
β=
q
k◦2 + p2◦ =
√
e k◦
(2.81)
Dalle 2.67 e 2.68 (e tenendo conto delle 2.69 e 2.73):
ez (y) '
C1 l◦ y
(0 ≤ y ≤ a)
ez (y) ' C1 (l◦ a/c)(b − y) (a < y ≤ b)
(2.82)
Per l◦ → 0, ez → 0. Inoltre, β è proporzionale a k◦ , per cui la propagazione tende ad assumere le
caratteristiche proprie di un’onda TEM.
21
2.5.2
Approssimazione di alta frequenza
Ad alta frequenza si ha:
tanh(p◦ c) → 1
(2.83)
Dalla 2.74 si ha quindi:
q
l◦ tan(l◦ a) ' r p◦ = r (r − 1)k◦2 − l◦2
(2.84)
Si può notare che tale equazione è indipendente da b.
Dalle 2.67 e 2.68 si hanno le seguenti.
• Per 0 ≤ y ≤ a:
ez (y) = C1 sin(l◦ y)
(2.85)
• Per a ≤ y ≤ b:
ez (y) = jC2 sinh[p◦ (b − y)] = C1 sin(l◦ a)
sinh[p◦ (b − y)]
sinh[p◦ (b − a)]
(2.86)
Per p◦ → ∞ i termini del tipo exp[−p◦ (b − y)] diventano trascurabili, per cui:
ez (y) ' C1 sin(l◦ a)
exp[p◦ (b − y)]
= C1 sin(l◦ a) exp[−p◦ (y − a)]
exp[p◦ (b − a)]
(2.87)
La Figura 2.15 mostra l’andamento in funzione di y dell’ampiezza del campo ez (y), come risulta dalle
2.85 e 2.87.
L’andamento decrescente per y > a è indipendente da b. All’aumentare della frequenza, l’onda tende ad essere guidata dall’interfaccia dielettrica ed il conduttore superiore (y = b) diventa
irrilevante.
Il valore di l◦ può essere ottenuto risolvendo graficamente la 2.84 (Figura 2.16).
22
23
I modi di propagazione sono dati dalle intersezioni tra le due curve. Per ciascun modo, al variare
della frequenza, il valore di l◦ varia con continuità in funzione della frequenza stessa. Questa proprietà
rende il comportamento di questa struttura diverso da quello delle guide d’onda metalliche. Per il
primo modo, poichè l◦ rimane limitato, al tendere all’infinito della frequenza si ha:
q
√
(2.88)
β = k 2 − l◦2 ' r k◦
Si può estendere la validità della 2.80 introducendo una costante dielettrica relativa efficace il cui
valore varia con la frequenza secondo l’andamento mostrato in Figura 2.17.
2.6
2.6.1
Microstriscia
Trattazione generale
La microstriscia è una struttura guidante la cui sezione nel piano xy (Fig. 2.18) è costituita dai
seguenti elementi:
• Supporto metallico, nel piano xz;
• Strato dielettrico, delimitato dai piani y = 0 e y = H;
• Lamina metallica sottile, di larghezza W , collocata al di sopra dello strato dielettrico.
La larghezza del supporto metallico sottostante è molto maggiore di W . Pertanto, tale larghezza
può essere considerata infinita senza perturbare le linee di flusso del campo elettrico. Per ragioni
costruttive, essendo H dell’ordine delle frazioni di mm, è difficile realizzare un dielettrico perfettamente isotropo. Per 0 < y ≤ H il dielettrico avrà quindi una costante dielettrica tensoriale. Si
avrà:
(2.89)
D = ◦ (r · E)
24
Con
rt 0 0
[r ] = 0 ry 0
0 0 rt
(2.90)
Per y > H, sarà r = 1. Valori tipici di rt sono compresi tra 2 e 12 per la parte reale, tra 0.0005 e
0.001 per la parte immaginaria. Il rapporto rt /ry è generalmente compreso tra 1 e 1.3.
La struttura è costituita da due conduttori paralleli. Tuttavia, sono presenti due aspetti che ne
rendono difficile la caratterizzazione:
1. la presenza di una discontinuità dielettrica per y = H;
2. la possibile anisotropia del dielettrico.
Per semplicità assumiamo che la lamina metallica, di larghezza W , abbia spessore infinitesimo e
conducibilità infinita.
La metodologia usata si basa sul potenziale vettore magnetico e il potenziale scalare elettrico.
Si cercheranno due soluzioni asintotiche valide nelle approssimazioni di bassa frequenza e di alta
frequenza, rispettivamente.
Sono presenti le seguenti sorgenti:
1. carica elettrica superficiale sulla lamina, di densità:
ρ(x, y, z) = ρs (x, z)δ(y − H)
(2.91)
2. corrente elettrica superficiale sulla lamina, di densità:
J(x, y, z) = Js (x, z)δ(y − H)
(2.92)
Le incognite del problema sono le seguenti:
1. Potenziale vettore: A(x, y, z)
2. Potenziale scalare: Φ(x, y, z)
Si usano le equazioni di Maxwell che assumono la seguente forma:
∇×E
∇×H
∇·D
∇·B
=
=
=
=
−jωB
jωD + J
ρ
ρm = 0
(2.93)
(2.94)
(2.95)
(2.96)
Per effetto della 2.96, è possibile definire una funzione potenziale vettore A tale che:
B = µ◦ H = ∇ × A
(2.97)
∇ × E = −jωB = −jω∇ × A
(2.98)
Si ha allora:
In base alla 2.98, i campi vettoriali E e −jωA possono differire di un gradiente di funzione scalare:
E = −jωA − ∇Φ
25
(2.99)
La 2.97 assegna il rotore di A. La divergenza può essere assegnata dalla “condizione di Lorentz”:
∇ · A = −jω◦ rt µ◦ Φ
(2.100)
∇∇ · A = −jω◦ µ◦ ∇(rt Φ)
(2.101)
∇(rt Φ) = Φ∇rt + rt ∇Φ
(2.102)
Dalla 2.100 si ha:
Si ha poi:
Per le proprietà della struttura:
∇rt =
δrt
y◦
δy
(2.103)
A questo punto, utilizziamo la relazione costitutiva relativa al campo elettrico, che assume la seguente
forma:
D = ◦ rt (Ex x◦ + Ez z◦ ) + ◦ ry Ey y◦
δΦ
δΦ
δΦ
= −◦ rt [jω(Ax x◦ + Az z◦ ) +
x◦ +
z◦ ] − ◦ ry (jωAy +
)y◦
δx
δz
δy
(2.104)
Risulta comodo esprimere la 2.104 nel seguente modo:
D = −◦ rt (jωA + ∇Φ) − ◦ (ry − rt )(jωAy +
δΦ
)y◦
δy
(2.105)
Vogliamo pervenire a espressioni che leghino i potenziali alle sorgenti. A tal fine, usiamo le 2.94 e
2.97. Si ha:
∇ × ∇ × A = ∇∇ · A − ∇2 A = jωµ◦ D + µ◦ J
(2.106)
Sostituiamo a D l’ espressione data dalla 2.105 e a ∇∇ · A le espressioni date dalle 2.101- 2.103. Si
ha:
δΦ
)y◦ ] + µ◦ J
(2.107)
−∇2 A = jωµ◦ [−jω◦ rt A + ◦ Φ∇rt − ◦ (ry − rt )(jωAy +
δy
Dividendo per componenti:
∇2 Ax + rt k◦2 Ax = −µ◦ Jx
∇2 Az + rt k◦2 Az = −µ◦ Jz
(2.108)
(2.109)
δrt
δΦ
− (ry − rt ) ]
δy
δy
δΦ
= jωµ◦ ◦ [(ry − rt )
+ Φ(H)(rt − 1)δ(y − H)]
δy
∇2 Ay + ry k◦2 Ay = −jωµ◦ ◦ [Φ
(2.110)
Per il potenziale scalare, un’ equazione differenziale può essere ottenuta a partire dalla 2.95 (legge di
Gauss). Tenendo conto, oltre che della stessa 2.95, anche della 2.104 e della condizione di Lorentz
2.100, è stato dimostrato che è valida la seguente relazione:
rt (
δ
δΦ
ρ
δAy
δ2Φ δ2Φ
+ 2 ) + (ry ) + 2rt k◦2 Φ = − + jω(ry − 1)Ay (H)δ(y − H) − jω(ry − rt )
(2.111)
2
δx
δz
δy
δy
◦
δy
Le 2.108 - 2.111 sono valide per 0 < y ≤ H. Per y > H si ha rt = ry = 1.
26
A questo punto, applichiamo le condizioni al contorno sul piano y = H. Nelle 2.108 - 2.111
figurano derivate seconde a primo membro mentre a secondo membro, tenendo conto anche della
2.108 - 2.92, sono presenti termini di tipo impulsivo in δ(y − H). Perchè le condizioni 2.108 - 2.111
siano soddisfatte, è necessario che le funzioni Ax (y), Ay (y), Az (y), Φ(y) siano continue in y = H,
con discontinuità nella derivata prima e andamento impulsivo nella derivata seconda. Una generica
funzione con andamento di questo tipo è mostrata in Figura 2.19.
Non è invece possibile che abbiano andamento impulsivo i secondi termini a primo membro
delle 2.108 - 2.111. Infatti, ne conseguirebbero singolarità nelle derivate prime e seconde, il che
sarebbe incompatibile con le equazioni stesse, che a secondo membro contengono funzioni δ, ma non
singolarità. Tenendo conto di quanto detto, ed eguagliando i termini in δ nelle 2.108 - 2.111 si ha:
H +
δAx = −µ◦ Jsx
δy H −
(2.112)
H +
δAz = −µ◦ Jsz
δy H −
(2.113)
H +
δAy = jωµ◦ ◦ (rt − 1)Φ(H)
δy H −
(2.114)
δΦ δΦ ρs
−
= − + jω(ry − 1)Ay (H)
ry
δy H +
δy H −
◦
(2.115)
Occorre, a questo punto, risolvere le 2.108-2.111 con le condizioni date dalle 2.112-2.115. Non è
stata trovata una soluzione generale, ma soltanto soluzioni asintotiche, valide nelle approssimazioni
di bassa frequenza e di alta frequenza. Nel seguente paragrafo sarà esposta la trattazione valida
nell’approssimazione di bassa frequenza. Tale trattazione ha un buon intervallo di validità, perchè le
dimensioni trasverse della struttura sono in molti casi piccole rispetto alla lunghezza d’onda.
27
2.6.2
Approssimazione di bassa frequenza
Le variabili A, Φ, J, ρ definite nel paragrafo precedente sono funzioni della pulsazione ω. Esprimiamo
tali funzioni mediante sviluppi in serie:
A = A◦ + ωA1 + ω 2 A2 + ...
Φ = Φ◦ + ωΦ1 + ω 2 Φ2 + ...
J = J◦ + ωJ1 + ω 2 J2 + ...
ρ = ρ◦ + ωρ1 + ω 2 ρ2 + ...
(2.116)
(2.117)
(2.118)
(2.119)
dove A◦ , A1 , A2 , J◦ , J1 , J2 sono coefficienti vettoriali e Φ◦ , Φ1 , Φ2 , ρ◦ , ρ1 , ρ2 sono coefficienti scalari.
Alle basse frequenze ω → 0, per cui diventano trascurabili i termini in ω, ω 2 , ecc. Analogamente,
essendo β e k◦ proporzionali alla frequenza, sono trascurabili i termini in β, β 2 , k◦ , k◦2 , ecc.. Sotto
tali approssimazioni le 2.108-2.111 si riducono alle seguenti:
δ2
δ2
+
)A◦ = −µ◦ Jx◦
δx2 δy 2 x
δ2
δ2
( 2 + 2 )A◦z = −µ◦ Jz◦
δx
δy
2
δ
δ2
( 2 + 2 )A◦y = 0
δx
δy
2
δ
δ
ρ◦
δ
(rt 2 + ry )Φ◦ = −
δx
δy δy
◦
(
(2.120)
(2.121)
(2.122)
(2.123)
Possiamo, inoltre, semplificare l’espressione di A◦ tenendo conto della condizione di Lorentz e
dell’equazione di continuità della carica elettrica. Dalla condizione di Lorentz 2.100 si ha:
∇ · A◦ =
δA◦x δA◦y
+
− jβA◦z = −jω◦ rt µ◦ Φ◦
δx
δy
Uguagliando i termini di ordine 0:
δA◦x δA◦y
+
=0
δx
δy
(2.124)
(2.125)
Per la continuità della carica elettrica sulla lamina si ha:
∇ · J = −jωρ
(2.126)
Poichè la lamina si sviluppa solo nelle direzioni x e z:
Quindi:
Uguagliando i termini di ordine 0 in ω:
J◦ = Jx◦ x◦ + Jz◦ z◦
(2.127)
δJx◦
− jβJz◦ = −jωρ◦
δx
(2.128)
δJx◦
=0
δx
(2.129)
28
Poichè Jx◦ = 0 sui bordi della lamina, per la 2.129 sarà Jx◦ = 0 ovunque. Quindi, non essendoci
sorgenti per A◦x , sarà, per la 2.108, A◦x = 0. Inoltre, per la 2.125:
δA◦y
=0
δy
(2.130)
A◦y è quindi una costante, e come tale non contribuisce al campo. Si può allora porre:
A◦ = A◦z z◦
(2.131)
Per quanto riguarda il potenziale scalare, poniamo:
Φ◦ = V (y = H; −W/2 < x < W/2)
Φ◦ = 0 (y = 0)
(2.132)
A questo punto, è possibile dimostrare che le proprietà propagative sono simili a quelle di un’onda
TEM. A tal scopo useremo:
1. l’equazione di continuità della carica elettrica;
2. la condizione al contorno del campo elettrico sulla lamina;
3. l’espressione della capacità per unità di lunghezza;
4. l’espressione dell’induttanza per unità di lunghezza.
Si procede come indicato nel seguito.
1. Integrando la 2.128 sulla lamina, tra −W/2 e W/2, si ha:
βIz◦ = ωQ◦
(2.133)
dove Iz◦ è la corrente che scorre sulla lamina e Q◦ è la carica per unità di lunghezza.
2. Il campo elettrico tangenziale sulla lamina, per la 2.99, è dato da:
Ez = −jωA◦z −
δΦ◦
= −jωA◦z + jβΦ◦
δz
(2.134)
Per le condizioni al contorno deve essere Ez = 0. Per cui, tenendo conto della 2.132:
ωA◦z = βV
(2.135)
3. La capacità per unità di lunghezza è data da:
C=
Q◦
V
(2.136)
4. Consideriamo il flusso magnetico per unità di lunghezza intorno alla lamina (Figura 2.20).
Tale flusso è dato da:
1 Z ∆l Z ∞
1 Z ∆l Z ∞
1 I
ψ=
(B · x◦ )dydz =
(∇ × A · x◦ )dydz =
A · dl
∆l 0 H
∆l 0 H
∆l Cl
29
(2.137)
La linea Cl comprende l’elemento di lunghezza ∆l sulla lamina e le due semirette verticali che
si congiungono all’infinito. Tenendo conto della 2.131:
ψ = A◦z
(2.138)
L’induttanza per unità di lunghezza sarà quindi data da:
L=
A◦z
ψ
=
Iz◦
Iz◦
(2.139)
Sostituendo la 2.136 nella 2.133:
βIz◦ = ωCV
(2.140)
ωLIz◦ = βV
(2.141)
Sostituendo la 2.139 nella 2.135:
Ponendo Zc = V /Iz◦ , dalle 2.140 e 2.141 si hanno le relazioni proprie delle onde TEM (linee di
trasmissione in senso stretto):
√
(2.142)
β = ω LC
s
L
(2.143)
C
Per il calcolo di L e C useremo le 2.120-2.123 con le condizioni al contorno 2.112 - 2.115. Poichè si
può porre A◦x = A◦y = 0 si ha:
Zc =
δ2
δ2
( 2 + 2 )A◦z = 0 (y < H, y > H)
δx
δy
2
δ
ry δ 2 ◦
( 2+
)Φ = 0 (y < H)
δx
rt δy 2
δ2
δ2
( 2 + 2 )Φ◦ = 0 (y > H)
δx
δy
30
(2.144)
(2.145)
(2.146)
Le condizioni al contorno per y = H saranno le seguenti.
• Per |x| < W/2
H +
δA◦z ◦
= −µ◦ Jsz
δy H −
(2.147)
δΦ◦ δΦ◦ ρ◦
− ry
=− s
δy H +
δy H −
◦
(2.148)
• Per |x| > W/2
H +
δA◦z =0
δy H −
(2.149)
δΦ◦ δΦ◦ − ry
=0
δy H +
δy H −
(2.150)
Si ha, inoltre, per |x| < W/2 e y = H:
Φ◦ = V
A◦ = A◦z z◦
Se la struttura fosse immersa in aria:
√
q
LCa =
µ◦ ◦
(2.151)
(2.152)
(2.153)
Ca è la capacità per unità di lunghezza di una struttura avente la stessa geometria della microstriscia,
ma immersa in aria, con rt = ry = 1. L è l’induttanza per unità di lunghezza, ed è indipendente
dalla costante dielettrica. Per la microstriscia reale:
L=
µ◦ ◦
Ca
√
s
β = ω LC = k◦
dove
e =
(2.154)
√
C
= k◦ e
Ca
C
Ca
(2.155)
(2.156)
Si ha quindi, per l’ impedenza caratteristica:
s
ZC =
L
=
C
s
L
Ca
s
Ca
ZCa
=√
C
e
(2.157)
dove ZCa è l’ impedenza caratteristica della struttura immersa in aria. A questo punto, il problema
consiste nel calcolare la costante dielettrica equivalente e . Si procede in due passi:
1. Calcolo della capacità della struttura immersa in aria Ca ;
2. Calcolo di C e di e = C/Ca .
31
Per la soluzione del primo problema possono essere utilizzate le trasformazioni conformi. La
soluzione esatta può essere approssimata con le seguenti formule:
2π◦
(W/H ≤ 1)
ln[8H/W + W/(4H)]
W
W
Ca = ◦ [ + 1.393 + 0.667 ln( + 1.444)] (W/H > 1)
H
H
Ca =
(2.158)
(2.159)
Per il calcolo di C si usano tecniche numeriche. Come prima cosa, si elimina il problema dell’anisotropia dielettrica attraverso un cambiamento di variabile (Figura 2.21). Per y ≤ H si pone:
s
u=
da cui:
rt
y
ry
δ
δ δu
=
=
δy
δu δy
s
(2.160)
rt δ
ry δu
(2.161)
Per y > H sarà:
u = y − (H − He )
con
s
He =
rt
H
ry
(2.162)
(2.163)
In tal caso sarà:
δ
δ
=
δy
δu
Dalle 2.145, 2.146, 2.148 e 2.150 si ha, per qualsiasi valore di y (o u):
(
δ2
δ2
+
)Φ◦ = 0
δx2 δu2
32
(2.164)
(2.165)
Per |x| < W/2:
δΦ◦ δΦ◦ δΦ◦ ρ◦
rt δΦ◦ − ry
=
− rg
=− s
δu He+
ry δu He−
δu He+
δu He−
◦
s
dove
√
rg =
rt ry
(2.166)
(2.167)
Una possibile soluzione numerica può essere ottenuta con l’artificio di porre pareti elettriche fittizie
per x ± a/2 con a sufficientemente grande da non perturbare le linee di flusso del campo elettrico
(p.es. a > 10W ) e avere:
Φ◦ (±a, He ) = 0
(2.168)
Si effettua uno sviluppo in serie di Fourier (con n dispari):
ρ◦s (x) =
∞
X
ρ◦n cos
n
nπx
2a
con:
(2.169)
0
ρ◦n
1 Z W/2 ◦ 0
nπx 0
=
dx
ρs (x ) cos
a −W/2
2a
∞
X
nπx
u > He
2a
n
∞
X
nπx
Φ◦ (x, u) =
gn (u) cos
u ≤ He
2a
n
Φ◦ (x, u) =
fn (u) cos
(2.170)
(2.171)
(2.172)
Ogni termine dello sviluppo di Φ◦ (x, u) deve soddisfare l’equazione di Laplace. Ponendo:
wn2
nπ
=
2a
2
(2.173)
si ha:
d2 fn (u)
− wn2 fn (u) = 0 u > He
du2
d2 gn (u)
− wn2 gn (u) = 0 u ≤ He
2
du
(2.174)
(2.175)
In pratica, si sovrappongono infinite distribuzioni di carica che si estendono tra −a/2 e a/2 in modo
da ottenere un risultato che abbia ρ◦s 6= 0 soltanto tra −W/2 e W/2. Dovranno essere soddisfatte le
seguenti condizioni:
fn (u) → 0 u → ∞
gn (u) → 0 u → 0
(2.176)
(2.177)
Le soluzioni hanno espressione:
fn (u) = Dn exp(−wn u)
gn (u) = Cn sinh(wn u)
33
(2.178)
(2.179)
La Φ◦ (x, u) deve essere continua per u = He , mentre la derivata deve avere una discontinuità dovuta
alle condizioni al contorno:
Cn sinh(wn He ) = Dn exp(−wn He )
!
ρ◦n
δfn
δgn =−
− rg
δu
δu He
◦
(2.180)
(2.181)
Quindi:
−wn Dn exp(−wn He ) − rg wn Cn cosh(wn He ) = −
ρ◦n
◦
(2.182)
Poniamo:
Tn = ◦ wn [sinh(wn He ) + rg cosh(wn He )]
(2.183)
Si ha:
ρ◦n
Cn =
Tn
ρ◦ sinh(wn He ) exp(wn He )
Dn = n
Tn
(2.184)
(2.185)
Sostituendo nelle 2.178, 2.179, e poi nelle 2.171, 2.172, 2.170 si ottengono le seguenti espressioni di
Φ◦ (x, u).
Per u ≤ He :
∞ Z W/2
X
1
0
0
0
◦
Φ (x, u) =
[cos(wn x) cos(wn x ) sinh(wn u)ρ◦s (x )]dx
(2.186)
−W/2 Tn
n
Per u > He :
◦
Φ (x, u) =
∞ Z
X
n
W/2
−W/2
1
0
0
0
[cos(wn x) cos(wn x ) sinh(wn He )] exp[−wn (u − He )]ρ◦s (x )dx
Tn
(2.187)
Per pervenire ad una forma compatta si può definire una funzione peso tale che:
◦
Φ (x, u) =
Z
W/2
−W/2
0
0
G(x, u, x , He )ρ◦s (x )dx
0
(2.188)
Sulla lamina, cioè per u = He e −W/2 < x < W/2 si ha:
V =
Z
Q◦ =
W/2
−W/2
W/2
0
0
G(x, He , x , He )ρ◦s (x )dx
Z
−W/2
0
ρ◦s (x )dx
0
0
Q◦
C=
V
(2.189)
Occorre risolvere un’equazione integrale, in cui la ρ◦s (x0 ) non è nota a priori.
Si utilizzano tecniche numeriche (ad esempio il metodo dei momenti). Le soluzioni numeriche esatte possono essere approssimate da formule semplici con tecniche di “fitting”. Una formula semplice
che approssima bene i valori di e per W/H > 1 è la seguente:
rg + 1 rg − 1
Ca (He )
e =
+
(1 + 12He /W )−1/2
2
2
Ca (H)
34
(2.190)
Capitolo 3
PROPAGAZIONE IN GUIDA D’ONDA
CIRCOLARE
3.1
Proprietà generali
Sia data (Figura 3.1) una guida d’ onda a sezione circolare di raggio a. Analogamente al caso delle
guide rettangolari, analizziamo la struttura nell’ ipotesi semplificativa di assenza di perdite.
Anche nella guida circolare potranno propagarsi modi TE e TM. Iniziamo, in questo caso, dai
modi TM, per i quali l’applicazione delle condizioni al contorno è più semplice e diretta. Per evidenti
ragioni, il sistema di coordinate cilindriche (r, φ) è il più adatto per trattare la presente struttura.
Per i modi TM si ha:
hz = 0
∇2t ez + kc2 ez = 0
(3.1)
La condizione al contorno è: ez = 0 per r = a. La seconda delle 3.1, in coordinate cilindriche, è:
1 δ 2 ez
δ 2 ez 1 δez
+
+
+ kc2 ez = 0
δr2
r δr
r2 δφ2
(3.2)
Applicando l’ipotesi di separabilità tra dipendenza da r e dipendenza da φ, si ha:
ez (r, φ) = f (r) · g(φ)
(3.3)
Dividendo la 3.2 per ez , tenendo conto della 3.3, si ha:
1 df
1 d2 f
1 d2 g
+
+
+ kc2 = 0
2
2
2
f dr
rf dr r g dφ
(3.4)
Moltiplicando per r2 e raggruppando opportunamente:
r2 d2 f
r df
1 d2 g
2 2
+
+
r
k
=
−
c
f dr2
f dr
g dφ2
(3.5)
Il primo membro della 3.5 è funzione della sola r. Il secondo membro è funzione della sola φ.
L’uguaglianza deve valere per qualsiasi valore di r e φ. Pertanto, ambedue i membri devono essere
35
uguali a una costante, che chiameremo ν 2 . Dalla 3.5 si ottiene allora la coppia di equazioni:
r2 d2 f
1 df
ν2
2
[
+
+ (kc − 2 )f ] = 0
f dr2
r dr
r
2
dg
+ ν 2g = 0
2
dφ
(3.6)
Per motivi legati alla geometria della struttura, la g(φ) deve essere periodica di periodo 2π. Per le
proprietà delle equazioni differenziali, ciò comporta che ν sia intero. Chiamando tale intero con n,
la soluzione della seconda delle 3.6 è:
g(φ) = A1 cos nφ + A2 sin nφ
(3.7)
A1 e A2 sono costanti. La prima delle 3.6, con ν = n, è l’ equazione di Bessel di ordine n. Le soluzioni
sono:
• Jn (kc r) (Funzione di Bessel di prima specie di ordine n)
• Yn (kc r) (Funzione di Bessel di seconda specie di ordine n).
La soluzione matematica Yn (kc r) è da scartare, in quanto presenta una singolarità per r = 0, il che
non è fisicamente ammissibile. La soluzione della 3.2 sarà pertanto:
ez (r, φ) = (A1 cos nφ + A2 sin nφ)Jn (kc r)
(3.8)
in cui le costanti A1 e A2 determinano l’ ampiezza del modo e l’ orientazione degli assi di simmetria
delle distribuzioni di campo. A1 e A2 dipendono dalle proprietà della sorgente del modo. Inoltre,
per la condizione al contorno (ez = 0 per r = a):
Jn (kc a) = 0
36
(3.9)
Quindi:
pnm
(3.10)
a
dove pnm è lo zero di ordine m della funzione di Bessel di ordine n. La coppia di indici interi n e m
identifica il modo TM . Si avrà, inoltre:
kc =
s
βnm =
q
2
k 2 − kcnm
=
k2 −
c
kcnm
2π
βnm
Zenm =
Z
k
Per i modi TE, si parte dalle equazioni:
p2nm
a2
fcnm =
(3.11)
ez = 0
∇2t hz + kc2 hz = 0
(3.12)
Dal punto di vista matematico la trattazione è del tutto simile a quella dei modi TM. Si ottiene:
hz (r, φ) = (B1 cos nφ + B2 sin nφ)Jn (kc r)
(3.13)
La condizione al contorno, in questo caso, impone che per r = a sia:
n·h=0
(3.14)
n · ∇t hz = 0
(3.15)
Ne consegue, per le equazioni dei modi TE,
(per r = a). Quindi:
dJn (kc r) =0
dr r=a
(3.16)
0
p
kc = nm
(3.17)
a
0
pnm è il massimo (o minimo) di ordine m della funzione di Bessel di ordine n. Gli andamenti delle
prime due funzioni di Bessel sono mostrati in Figura 3.2.
0
I primi valori più bassi di pnm e pnm sono mostrati nella tabella 3.1:
0
pnm
m=1 m=2 m=3
n
0
1
2
2.40
3.83
5.13
5.52
7.02
8.42
pnm
m=1 m=2 m=3
n
0 3.83
1 1.84
2 3.05
8.65
10.17
11.62
7.02
5.33
6.71
10.17
8.54
9.97
Tabella 3.1
0
Si osserva che, poichè dJ0 /dx = −J1 (x), p1m = p0m . Pertanto i modi TE0m e TM1m sono degeneri.
Tenendo conto delle 3.10, 3.11, 3.17 il modo fondamentale risulta essere il TE11 ; successivamente si
ha il TM01 .
37
3.2
Il modo fondamentale
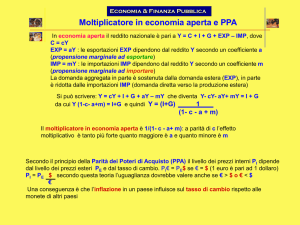
Analizziamo ora più in dettaglio il modo fondamentale TE11 . Partiamo dalla 3.13 supponendo,
temporaneamente, di avere B2 = 0 . Si ha:
0
hz = B1 cos φ J1 (
p11 r
)
a
0
0
0
jβ11
jβ11
jβ11 p 0 p r
p r
h = − 2 ∇t hz = B1 [− 2 11 J1 ( 11 ) cos φr◦ + 2 J1 ( 11 ) sin φφ◦ ]
kc11
kc11 a
a
rkc11
a
e = −Zh11 z◦ × h
con
Zh11 =
k
Z
β11
(3.18)
(3.19)
hr ed eφ si annullano per r = a. Alle 3.18 corrispondono le linee di flusso dei campi e (linea continua)
ed h (linea tratteggiata) mostrate in Figura 3.3.
Le linee di flusso del campo e hanno asse di simmetria parallelo all’asse x come conseguenza
della scelta B2 = 0. Scegliendo B1 = 0 l’asse di simmetria sarà parallelo all’asse y. In generale,
l’orientazione dell’asse di simmetria dipenderà dal rapporto B2 /B1 . Qualora fosse B2 = ±jB1
l’ intera configurazione di campo disegnata in Figura 3.3 ruoterebbe intorno all’ asse della guida
con una velocità angolare uguale alla pulsazione dell’ onda. La corrispondente polarizzazione di e
sarebbe allora circolare sull’ asse della guida, lineare sulle pareti (normale ad esse), ellittica nelle
zone intermedie. Uno schema di questa polarizzazione è mostrato in Figura 3.4.
38
39
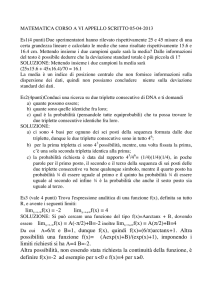
3.3
I modi TEom
Assumono particolare interesse i modi TEom , nei quali il campo hz è indipendente da φ. Si ha:
hz = BJ0 (kc r)
(3.20)
Poichè δhz /δφ = 0 si avrà hφ = 0 e er = 0. Le linee di flusso dei campi sono mostrate in Figura
3.5: in linea continua quelle del campo e (circonferenziali), in linea tratteggiata quelle del campo h
(normali).
Per la corrente superficiale si avrà:
Js = n × H = n × Hz z◦
(3.21)
La Js sarà diretta secondo φ, essendo nulla la componente secondo z. Quest’ ultima proprietà, in
presenza di pareti con conducibilità finita, produce perdite più basse rispetto a quelle prodotte da
altri modi.
40
Capitolo 4
RISONATORI A MICROONDE
I risonatori sono regioni di spazio nelle quali si ha accumulo di energia elettromagnetica. Sono
l’ estensione, alle frequenze delle microonde, dei circuiti risonanti. Hanno numerose applicazioni:
filtri, oscillatori, amplificatori, frequenzimetri, ecc.. Lo studio dei risonatori a microonde riutilizza
numerosi concetti propri dei circuiti risonanti. Tali concetti, pertanto, saranno brevemente richiamati
nel seguito.
4.1
Richiami sui circuiti risonanti
Sia dato (Figura 4.1) un bipolo contenente resistenze, induttanze, e capacità. A partire dal Teorema
di Poynting, è possibile dimostrare che l’ impedenza d’ingresso Zin è esprimibile come:
Zin =
Pa + 2jω(Wm − W e)
1
II ∗
2
(4.1)
Pa è la potenza assorbita dagli elementi resistivi. Wm è l’ energia magnetica mediamente immagazzinata in un periodo dagli elementi induttivi. We è l’ energia elettrica mediamente immagazzinata in
un periodo dagli elementi capacitivi. I è il fasore della corrente e ω è la pulsazione.
Si definisce “frequenza di risonanza” f◦ la frequenza per cui Wm = We . Si definisce “fattore di
qualità”:
ω(Wm + W e)
Q=
(4.2)
Pa
Alla risonanza (ω = ω◦ = 2πf◦ ):
2ω◦ Wm
2ω◦ We
=
(4.3)
Pa
Pa
Il fattore di qualità ha un’interessante interpretazione. Supponiamo che un circuito passivo, in
assenza di generatori, sia in risonanza. All’ istante iniziale, sia W◦ l’energia totale immagazzinata in
un periodo. Se non ci fossero perdite, si avrebbe:
Q=
W = W◦
(4.4)
(costante nel tempo). Per effetto delle perdite, si avrà:
W = W◦ exp(−2δt)
41
(4.5)
dove δ è detto “dumping factor”. D’ altra parte è:
Pa = −
dW
= 2δW
dt
(4.6)
Quindi:
δ=
Pa
ω
=
2W
2Q
(4.7)
Il dumping factor è inversamente proporzionale al fattore di qualità. I casi più semplici di circuito
risonante sono i circuiti serie e parallelo, mostrati nelle Figure 4.2 e 4.3, rispettivamente.
Riepiloghiamo nel seguito le proprietà fondamentali.
1. Circuito risonante serie.
• Pulsazione di risonanza:
ω◦ = √
1
LC
(4.8)
• Fattore di qualità:
Q=
ω◦ L
1
=
R
ω◦ RC
(4.9)
• Impedenza d’ ingresso:
Zin = R + jωL − j
1
ωC
(4.10)
Per ω = ω◦ + ∆ω , con ∆ω ω◦ :
Zin ' R +
42
j2RQ∆ω
ω◦
(4.11)
43
• Potenza assorbita:
1
Pa = RII ∗
2
(4.12)
• Energia magnetica mediamente immagazzinata in un periodo:
1
Wm = LII ∗
4
(4.13)
• Energia elettrica mediamente immagazzinata in un periodo:
We =
1 II ∗
4 ω2C
(4.14)
1
LC
(4.15)
2. Circuito risonante parallelo.
• Pulsazione di risonanza:
ω◦ = √
• Fattore di qualità:
Q = ω◦ RC =
R
ω◦ L
(4.16)
• Ammettenza d’ ingresso:
Yin =
1
1
+ jωC − j
R
ωL
(4.17)
j2Q∆ω
1
+
R
Rω◦
(4.18)
1VV∗
2 R
(4.19)
Per ω = ω◦ + ∆ω , con ∆ω ω◦ :
Yin '
• Potenza assorbita:
Pa =
• Energia magnetica mediamente immagazzinata in un periodo:
Wm =
1VV∗
4 ω2L
(4.20)
• Energia elettrica mediamente immagazzinata in un periodo:
1
We = CV V ∗
4
(4.21)
In generale i circuiti risonanti, oltre ad avere un elemento resistivo interno, alimentano un circuito
esterno che ha una resistenza RL . Si definisce allora un fattore di qualità esterno QL .
• Per i circuiti risonanti serie:
QL =
44
ω◦ L
RL
(4.22)
• Per i circuiti risonanti parallelo:
QL = ω◦ RL C =
RL
ω◦ L
(4.23)
In ambedue i casi, il fattore di qualità totale , che tiene conto sia delle perdite interne che del carico
esterno, sarà dato da:
1
1
1
= +
(4.24)
QT
Q QL
4.2
Risonatori in linea
Risonatori possono essere ottenuti utilizzando semplicemente tratti di linea di trasmissione. Nel caso
reale, saranno presenti perdite.
4.2.1
Linea a λ/2 chiusa in cortocircuito
Dalla teoria delle linee con piccole perdite, per ZL → 0, si ha:
Zin (l) = ZC tanh(αl + jβl) = ZC
tanh αl + j tan βl
1 + j tanh αl tan βl
(4.25)
Per piccole perdite:
tanh αl ' αl
(4.26)
Inoltre, ponendo ω = ω◦ + ∆ω , con ∆ω ω◦ , si ha:
βl = π(1 +
tan βl = tan π
∆ω
)
ω◦
∆ω
∆ω
'π
ω◦
ω◦
(4.27)
(4.28)
Quindi, per la 4.25:
Zin (l) ' ZC
αl + jπ(∆ω/ω◦ )
' ZC (αl + jπ∆ω/ω◦ )
1 + jαlπ(∆ω/ω◦ )
(4.29)
Confrontando la 4.29 con le 4.11 e 4.9 si osserva che il comportamento è simile a quello di un circuito
risonante serie con:
R = ZC αl
(4.30)
π
L = ZC
(4.31)
2ω◦
1
C= 2
(4.32)
ω◦ L
Si avrà, di conseguenza:
β
2α
Il fattore di qualità è inversamente proporzionale ad α, come fisicamente prevedibile.
Q=
45
(4.33)
4.2.2
Linea a λ/4 chiusa in cortocircuito
Se una linea di lunghezza λ/4 è chiusa in cortocircuito, saranno sempre valide le 4.25 e 4.26. Si avrà,
inoltre:
∆ω
π
)
(4.34)
βl = (1 +
2
ω◦
π ∆ω
π ∆ω
cot βl = − tan
'−
(4.35)
2 ω◦
2 ω◦
È conveniente porre la 4.25 nella forma:
1 − j tanh αl cot βl
tanh αl − j cot βl
(4.36)
1 + jαlπ∆ω/(2ω◦ )
ZC
'
αl + jπ∆ω/(2ω◦ )
αl + jπ∆ω/(2ω◦ )
(4.37)
Zin (l) = ZC
Tenendo conto della 4.26 e della 4.35:
Zin (l) ' ZC
Confrontando la 4.37 con le 4.18 e 4.16 si osserva che il comportamento è simile a quello di un circuito
risonante parallelo con:
ZC
R=
(4.38)
αl
π
C=
(4.39)
4ω◦ ZC
1
(4.40)
L= 2
ω◦ C
Si otterrà poi, anche in questo caso:
β
(4.41)
Q=
2α
4.2.3
Linee a circuito aperto
La trattazione sviluppata nei due paragrafi precedenti può essere ripetuta nell’ ipotesi ZL → ∞ (circuito aperto). Linee a circuito aperto approssimano bene il comportamento di alcuni risonatori a microstriscia. È agevole verificare che si ha un inversione rispetto al caso di linee chiuse in cortocircuito.
Le linee a circuito aperto si comportano analogamente a:
• Circuiti risonanti parallelo se l = λ / 2
• Circuiti risonanti serie se l = λ / 4
4.3
Cavità risonanti
I risonatori utilizzati nei circuiti in guida d’ onda sono le cavità risonanti, costituite da volumi delimitati da superfici metalliche. Se esistono opportune relazioni tra dimensioni delle pareti metalliche
e lunghezza d’ onda, è possibile avere campo elettromagnetico all’ interno della cavità. Le perdite
dovute alla conducibilità delle pareti sono piccole rispetto all’ energia immagazzinata, per cui i fattori di qualità sono sensibilmente più alti di quelli dei circuiti risonanti e dei risonatori in linea. L’
accoppiamento tra cavità e guida d’ onda si ottiene utilizzando fori o tratti di coppia coassiale. Le
due strutture basilari sono le cavità rettangolari e quelle circolari.
46
4.3.1
Cavità rettangolari
Una cavità rettangolare può essere descritta come una guida d’ onda rettangolare, di lati a e b, con
due sezioni trasversali, distanti d, in cui sono collocate pareti metalliche (fig. 4.4).
Per ogni modo TEmn o TMmn che si può propagare nella guida rettangolare, esistono valori
discreti di d compatibili con la presenza di campo elettromagnetico nella zona compresa tra le due
pareti trasversali. In particolare, le condizioni al contorno impongono che il campo elettrico trasverso
sia nullo sia per z=0 che per z = d. Ciò implica che:
d=l
con l intero. Ovvero:
λg
2
(4.42)
π
d
che per i modi TMmn sono valide le :
βnm = l
D’ altra parte, sia per i modi TEmn
2
βnm
= k2 −
nπ
a
2
−
mπ
b
(4.43)
2
(4.44)
Ne risulta che deve essere soddisfatta la seguente condizione sulla costante k:
k = knml =
v
u
u nπ 2
t
a
mπ
+
b
2
lπ
+
d
!2
(4.45)
Pertanto, assegnate le dimensioni a, b e d, è possibile avere campo elettromagnetico (oscillazioni)
all’ interno della cavità se e solo se la frequenza delle oscillazioni appartiene ad un insieme discreto
definito da una terna di interi (n, m, l) in modo tale che:
fnml
c
=
knml = c
2π
v
u u n 2
t
2a
47
m
+
2b
2
l
+
2d
!2
(4.46)
√
con c = 1/ µ.
Le frequenze definite dalla 4.46 sono dette di “risonanza” perchè si può dimostrare che, in corrispondenza di esse, si ha Wm = We . La 4.46 definisce la condizione per avere “modi di risonanza”,
che saranno denominati con TEmnl o TMmnl .
Consideriamo il caso particolare di cavità con r = 1 ( = ◦ ) e modo di risonanza TE101 (n=1,
m=0, l=1). Può essere considerata una guida d’ onda rettangolare, con b < a, in cui si propaga
il modo TE10 , delimitata da due pareti traverse metalliche distanti d. In assenza di pareti traverse
metalliche si sarebbe avuto, per le proprietà del TE10 :
−
+
exp(jβ10 z)] cos
exp(−jβ10 z) + C10
Hz = [C10
πx
a
β10 a +
πx
−
[C10 exp(−jβ10 z) − C10
exp(jβ10 z)] sin
π
a
kZa +
πx
−
= −j
[C10 exp(−jβ10 z) + C10
exp(jβ10 z)] sin
π
a
= Ex = Ez = 0
Hx = j
Ey
Hy
(4.47)
Introducendo pareti metalliche sulle sezioni z = 0 e z = d si avrà:
Ey (x, y, 0) = 0
Ey (x, y, d) = 0
(4.48)
−
+
= −C10
C10
(4.49)
Dalla prima delle 4.48 si ha :
Dalla seconda delle 4.48, tenendo conto della 4.49, si ha:
+
−2jC10
sin(β10 d) = 0
Quindi:
β10 =
Per la 4.44:
π
d
s
2
(4.50)
(4.51)
π 2
π
+
k = k101 =
a
d
Le espressioni dei campi diversi da 0 all’ interno della cavità saranno quindi le seguenti:
πx
πz
+
Hz = −2jC10
cos
sin
a
d
πx
πz
+a
Hx = 2jC10 sin
cos
d
a
d
+
−2C10 k101 Za
πx
πz
Ey =
sin
sin
π
a
d
(4.52)
(4.53)
Le espressioni delle energie medie immagazzinate saranno le seguenti:
0
0
◦ r Z a Z b Z d
∗
+ 2 ◦ r
(Ey Ey )dzdydx = |C10 | · 2 (k101 Z)2 a3 bd
We =
4 0 0 0
4π
Wm =
µ◦ Z a Z b Z d
(Hx Hx∗ + Hz Hz∗ )dzdydx
4 0 0 0
48
(4.54)
(4.55)
Sostituendo nella 4.55 la prima e la seconda delle 4.53, calcolando l’integrale e confrontando con la
4.54, si può verificare che Wm = We . Il fattore di qualità dovuto a perdite conduttive, in risonanza,
sarà dato da:
2ωWe
Qσ =
(4.56)
Paσ
Paσ è la potenza dissipata nella cavità, data da:
Paσ
Rm Z
=
(Js · J∗s )dS
2 W
(4.57)
dove W è la superficie costituita dall’insieme delle 6 pareti. Per la condizione al contorno del campo
magnetico, si avrà:
Rm Z
|Ht |2 dS
(4.58)
Paσ =
2 W
Il campo magnetico tangenziale sarà dato da:
• Hx per le due pareti traverse rispetto all’asse z;
• Hz per le quattro pareti parallele all’asse z.
Sostituendo e integrando si ottiene:
+ 2
Paσ = |C10
| Rm
2a3 b + 2d3 b + 2ad3 + da3
d2
(4.59)
Il fattore di qualità dovuto alle perdite conduttive si otterrà sostituendo la 4.59 e la 4.54 nella 4.56.
00
00
0
0
Se la cavità è riempita di dielettrico di costante dielettrica relativa r = r − jr , con r r , la
frequenza di risonanza sarà:
v
u
fnml
u n
c
=
knml = ct
2π
2a
2
m
+
2b
2
l
+
2d
!2
(4.60)
q
con c = 1/ µ◦ 0r . La potenza dissipata per perdite dielettriche sarà:
00
ω◦ r Z a Z b Z d
(Ey Ey∗ )dzdydx
Pa =
2
0 0
0
(4.61)
Tenendo conto della 4.54 il fattore di qualità dovuto a perdite dielettriche sarà:
0
2ωWe
Q =
= 00r
Pa
r
(4.62)
Se sono presenti perdite sia conduttive che dielettriche, il fattore di qualità totale sarà dato da:
1
1
1
=
+
Q
Qσ Q
49
(4.63)
4.3.2
Cavità cilindriche
Una cavità cilindrica può essere descritta come una guida d’onda circolare, di raggio a, con due sezioni
trasversali, distanti d, in cui sono collocate pareti metalliche. Analogamente al caso delle cavità
rettangolari, sarà presente campo elettromagnetico all’interno della cavità se e solo se è soddisfatta
la 4.43. In questo caso βnm sarà la costante di propagazione di un modo TEnm o TMnm in guida
circolare. Consideriamo il modo di risonanza TE111 , ottenuto da una guida circolare in cui si propaga
il modo TE11 , introducendo pareti metalliche distanti λg /2. In guida circolare, prima di introdurre
le pareti metalliche, i campi sono dati dalle seguenti espressioni:
0
p11 r
) cos φ
a
0
jβ11 a 0 p11 r
+
−
Hr = −[C11 exp(−jβ11 z) − C11 exp(jβ11 z)] 0 J1 (
) cos φ
p11
a
0
jβ11 a2
p r
+
−
Hφ = [C11
exp(−jβ11 z) − C11
exp(jβ11 z)] 0 2 J1 ( 11 ) sin φ
(p11 ) r
a
0
p r
jkZa2
+
−
Er = [C11
exp(−jβ11 z) + C11
exp(jβ11 z)] 0 2 J1 ( 11 ) sin φ
(p11 ) r
a
0
jkZa 0 p r
+
−
Eφ = [C11
exp(−jβ11 z) + C11
exp(jβ11 z)] 0 J1 ( 11 ) cos φ
p11
a
Ez = 0
−
+
exp(jβ11 z)] J1 (
exp(−jβ11 z) + C11
Hz = [C11
(4.64)
L’introduzione di pareti metalliche distanti tra loro d produrrà gli stessi effetti che si hanno in guida
rettangolare. Si avrà, quindi:
−
+
C11
= −C11
(4.65)
π
(4.66)
β11 =
d
k = k111 =
v
u
u
t
0
p
2
β11
+ 11
a
!2
=
v
u u π 2
t
d
0
p
+ 11
a
!2
(4.67)
Per il calcolo del fattore di qualità dovuto a perdite dielettriche varrà sempre la 4.62. Per il
calcolo relativo alle perdite conduttive, si procede in modo analogo al caso delle cavità rettangolari.
Le perdite sono dovute alla corrente superficiale Js che è presente sia sul mantello cilindrico che sulle
pareti terminali. In generale si ha:
Js = n × H = Jsφ φ◦ + Jsz z◦
(4.68)
Assumono particolare interesse i modi di risonanza TE0ml . Tali modi, essendo derivati da modi di
propagazione TE0m in guida circolare, sono caratterizzati dall’avere sul mantello cilindrico, Jsz = 0.
Di conseguenza, saranno caratterizzati da basse perdite conduttive e alti fattori di qualità. Nelle cavità usate come frequenzimetri, un elevato fattore di qualità è fondamentale per avere uno strumento
di misura selettivo in frequenza. Generalmente, per questa applicazione si opera sulla risonanza del
modo TE011 .
50
Capitolo 5
Circuiti a microonde
5.1
Premessa
In precedenza si sono analizzate le proprietá propagative di singole strutture guidanti, in generale
illimitate rispetto alla direzione dell’asse z. Obiettivo é stato quello di ottenere le espressioni dei campi
E ed H (compatibili con la geometria della struttura), la costante di propagazione e l’impedenza
d’onda.
Vedremo ora come le strutture guidanti si interconnettono tra loro. A tal fine, riuseremo quanto
possibile i concetti propri delle linee di trasmissione. Per le strutture che supportano onde TEM,
tale riuso é immediato in quanto per esse sono definibili direttamente le funzioni V (z) ed I(z). Un
semplice esempio di interconnessione é mostrato in fig. 5.1.
Si abbiano due tratti illimitati di cavo coassiale riempiti con due diversi dielettrici ed interconnessi
attraverso un’interfaccia piana. Se un tratto di linea é illimitato, l’impedenza d’ingresso é uguale
alla impedenza caratteristica della linea. Si avrá, all’interfaccia:
• ΓV 1 = (ZC2 − ZC1 )/(ZC2 + ZC1 ) per onde provenienti da sinistra
• ΓV 2 = (ZC1 − ZC2 )/(ZC1 + ZC2 ) per onde provenienti da destra
Nel problema di Fig. 5.1 sono fisicamente definite tensioni, correnti e impedenze caratteristiche.
Se una simile interfaccia é tra guide d’onda che trasportano uno o piú modi, la soluzione non é altrettanto immediata. Si procede in tal caso associando a ciascun modo una ”linea di trasmissione equivalente”.
Tale associazione si basa sulle seguenti proprietá delle guide d’onda.
• Ciascun modo é caratterizzato da una propria costante di propagazione e una propria impedenza
d’onda.
• La dipendenza delle ampiezze dei campi dalla coordinata z é esponenziale, analogamente a
quella delle tensioni e correnti nelle linee di trasmissione.
• Ciascun modo trasporta potenza indipendentemente dagli altri (principio di ortogonalitá dei
modi).
Dato un modo che si propaga in una guida, supposta priva di perdite, le espressioni dei campi
sono:
E = E+ + E− = C + (e + ez ) exp(−jβz) + C − (e − ez ) exp(jβz)
H = H+ + H− = C + (h + hz ) exp(−jβz) + C − (−h + hz ) exp(jβz)
51
(5.1)
C + e C − sono i coefficienti di ampiezza del modo nei due versi di propagazione (p.es., nel caso di
guida rettangolare erano stati indicati con Cnm ). Le 5.1 sono generali: uno tra ez e hz puó essere
nullo, nei casi di modi TE o TM.
Per ogni modo, si definiscono onde di tensione e corrente equivalenti, V + , V − , I + , I − , come
proporzionali ai coefficienti di ampiezza dei modi:
V+
V−
I+
I−
=
=
=
=
kV · C +
kV · C −
kI · C +
kI · C −
(5.2)
Si definiscono poi tensioni e correnti equivalenti del modo come segue:
V = V + exp(−jβz) + V − exp(jβz)
I = I + exp(−jβz) − I − exp(jβz)
(5.3)
La linea equivalente é una linea ideale su cui sono presenti le V e le I date dalle 5.3 e 5.2. Si
impone che la potenza trasportata dal modo sia uguale a quella trasportata dalla linea equivalente.
Si ha quindi:
1 + + ∗ |C + |2 Z
(e × h∗ ) · z◦ dS
(5.4)
V (I ) =
2
2
S
Tenendo conto delle 5.2:
Z
(5.5)
kV kI∗ = (e × h∗ ) · z◦ dS
S
In assenza di perdite, o se é comunque valida l’approssimazione di piccola perturbazione, Zw sará
reale. Oltre alla 5.5 sará allora valida anche la:
kV kI =
Z
S
(e × h) · z◦ dS
52
(5.6)
La 5.5 (o la 5.6) stabilisce una prima relazione tra kV e kI . La seconda relazione é data da:
kV
V+
V−
= + = −
kI
I
I
(5.7)
Nel caso di linee di trasmissione in senso stretto, i rapporti V + /I + e V − /I − devono essere uguali
all’impedenza caratteristica. Se, invece, le V + , I + , V − , I − sono quantitá equivalenti definite dalle 5.2,
non puó essere fissata alcuna condizione a livello di singola struttura, in quanto la ZC é indeterminata.
In questi casi, il problema si risolve ragionando direttamente su giunzioni tra due o piú strutture.
Supponiamo di avere un problema analogo a quello di Fig. 5.1, cioé un’interfaccia tra due tratti
illimitati di strutture guidanti con un solo modo. Supponiamo di conoscere le proprietá geometriche
e dielettriche delle due strutture ma di trovarci in una situazione in cui le ZC non sono definibili. In
tal caso, si procede come segue.
• Si calcolano, o si misurano, i rapporti ΓV 1 = V1− /V1+ = C1− /C1+ e ΓV 2 = V2− /V2+ = C2− /C2+ .
(Nel caso del calcolo, si useranno metodi elettromagnetici che saranno diversi per ogni singolo
caso, a seconda delle proprietá geometriche e dielettriche delle due strutture).
• Si attribuiscono alle due strutture impedenze caratteristiche equivalenti ZC1 e ZC2 tali da
soddisfare la condizione:
ZC2
1 + ΓV 1
=
(5.8)
ZC1
1 − ΓV 1
ovvero:
1 + ΓV 2
ZC1
=
(5.9)
ZC2
1 − ΓV 2
Nota: nel caso delle guide d’onda, non é detto che il rapporto ZC2 /ZC1 sia uguale al rapporto tra
corrispondenti impedenze d’onda. Come si vedrá, ció sará vero solo in strutture particolari.
5.2
Giunzioni passive
Si definisce giunzione una regione di spazio su cui afferiscono N linee equivalenti (Fig. 5.2).
Ciascuna linea equivalente puó corrispondere ad una linea di trasmissione in senso stretto (struttura guidante con modo TEM) ovvero ad un modo che si propaga in una guida d’onda. In quest’ultimo
caso, il numero di linee equivalenti potrá essere maggiore di quello delle guide d’onda. Si definiscono porte elettriche le sezioni delle linee equivalenti che vengono assunte come interfacce tra linea
equivalente e giunzione.
Si suppone che all’interno della giunzione, che é delimitata dalle porte elettriche, siano presenti
esclusivamente elementi passivi. Sulla generica k-esima porta saranno definibili le variabili espresse
dalle 5.3 e 5.2: Vk , Vk+ , Vk− , Ik , Ik+ , Ik− . Scegliendo di far coincidere ogni porta con l’origine dell’ascissa
longitudinale z lungo la corrispondente linea equivalente, si avrá:
Vk = Vk+ + Vk−
Ik = Ik+ − Ik−
(5.10)
L’insieme delle N linee equivalenti é rappresentato da 6 vettori ad N dimensioni: [V ], [V + ], [V − ], [I],
[I + ], [I − ]. La giunzione impone relazioni tra coppie dei suddetti vettori. Tali relazioni, supponendo
lineare il mezzo che riempie la giunzione, saranno anch’esse lineari ed esprimibili tramite matrici. Le
relazioni piú usate sono le seguenti:
53
[V ] = [Z][I], ovvero [I] = [Y ][V ];
[V − ] = [S][V + ]
Le matrici [Z] e [Y ] prendono il nome di matrice impedenza e ammettenza, rispettivamente. La
matrice [S] prende il nome di matrice di scattering. Le matrici [Z], [Y ] ed [S] sono N × N con
elementi complessi. Pertanto la definizione completa della giunzione richiede 2 · N 2 informazioni.
Vedremo come, in alcuni casi notevoli, il numero di informazioni si riduce a causa di proprietá di cui
le matrici godono.
5.2.1
Proprietá delle matrici [Z] ed [Y ]
Sussistono i seguenti teoremi
1. Se la giunzione contiene materiale isotropo ( e µ scalari) le matrici [Z] ed [Y ] sono simmetriche
rispetto alla diagonale principale: Zij = Zji , Yij = Yji
2. Se la giunzione, oltre a contenere materiale isotropo, é anche priva di perdite, tutti gli elementi
delle matrici [Z] ed [Y ] sono immaginari puri: <[Zij ] = <[Yij ] = 0
Dimostrazione del primo teorema
Consideriamo una superficie chiusa S che racchiude la giunzione passando attraverso le porte della
giunzione stessa (Fig. 5.3).
Siano dati due insiemi indipendenti di sorgenti impresse (1 e 2), ambedue esterni alla superficie
S. Siano E1 , H1 ed E2 , H2 le distribuzioni di campo prodotte dalle due sorgenti. Applicando il
teorema di reciprocitá alla superficie S si ha:
I
S
(E1 × H2 − E2 × H1 ) · ndS = 0
54
(5.11)
Lungo la superficie S, saranno presenti campi soltanto sulle N porte. Detta tk la parte di superficie
corrispondente alla k-esima porta, si avrá:
N Z
X
k=1 tk
(E1k × H2k − E2k × H1k ) · ndS = 0
(5.12)
La 5.12 deve valere per qualsiasi coppia di sorgenti esterne alla superficie S. In particolare, deve
valere qualora le due sorgenti vengano scelte nel seguente modo.
1. Sorgente 1: un insieme di generatori che alimentano le linee in modo da produrre il seguente
effetto complessivo:
E1k 6= 0 (e quindi V1k 6= 0) per k = i
E1k = 0 (e quindi V1k = 0) per k 6= i
(si noti che, per effetto delle riflessioni prodotte dalla giunzione e dei diversi segni nella 5.1 si
puó avere H1k 6= 0 anche se E1k = 0).
2. Sorgente 2: un insieme di generatori che alimentano le linee in modo da produrre il seguente
effetto complessivo:
E2k 6= 0 (e quindi V2k 6= 0) per k = j
E2k = 0 (e quindi V2k = 0) per k 6= j
La 5.12 implica in questo caso la:
Z
ti
(E1i × H2i ) · ndS =
Z
tj
(E2j × H1j ) · ndS
(5.13)
La sorgente 1 é tale che E1j = 0, ma H1j puó essere 6= 0. La sorgente 2 é tale che E2i = 0, ma H2i
puó essere 6= 0.
55
Combinando le 5.1, 5.6 e 5.13 si ha:
V1i I2i = V2j I1j
(5.14)
Nelle variabili in 5.14, il primo pedice fa riferimento alla sorgente, il secondo alla porta.
Per la definizione di matrice [Y ] si ha:
N
X
I2i =
k
N
X
I1j =
Yik V2k
Yjk V1k
(5.15)
k
Per come sono state definite le sorgenti, e poiché Vmk = 0 se Emk = 0, si ha:
I2i = Yij V2j
I1j = Yji V1i
(5.16)
Yij = Yji
(5.17)
Combinando le 5.16 con la 5.14:
É cosı́ dimostrata la simmetria della matrice [Y ]. Poiché l’inversa di una matrice simmetrica é
anch’essa simmetrica, la proprietá varrá anche per la matrice [Z]. Una giunzione che gode di questa
proprietá é detta anche ”reciproca”.
Dimostrazione del secondo teorema
Per la seconda dimostrazione é utilizzabile ancora lo schema di Fig. 5.4, Se la giunzione é priva di
perdite, il flusso entrante del vettore di Poynting sará:
−
1I
(E × H∗ ) · ndS = 2jω(Wm − We )
2 S
(5.18)
cioé puramente immaginario. Poiché i campi sono presenti soltanto sulle porte dovrá essere:
<[
N Z
X
i
ti
(Ei × H∗i ) · ndS] = 0
(5.19)
Per le 5.1, 5.3 e 5.2, tenendo conto che il riferimento lungo ogni linea é scelto in modo da avere z = 0
sulle porte, dalla 5.19 si ottiene:
<[
N
X
Vi Ii∗ ] = 0
(5.20)
i
Per la definizione di matrice [Z], dalla 5.20 si ha:
<[
N X
N
X
i
Zij Ij Ii∗ ] = 0
(5.21)
j
La 5.21 deve valere comunque sia alimentata la giunzione. In particolare, deve valere se é alimentata
in modo che le correnti siano nulle su tutte le porte, esclusa la k-esima. Si deve avere allora:
<[Zkk Ik Ik∗ ] = 0
56
(5.22)
Deve quindi essere:
<[Zkk ] = 0
(5.23)
Il teorema é quindi dimostrato per gli elementi della diagonale principale. Per gli altri, teniamo conto
che la 5.21 deve valere anche se la giunzione é alimentata in modo che le correnti siano nulle su tutte
le porte, escluse due di esse, a cui attribuiamo gli indici r ed s. Si deve avere allora:
<[Zrr Ir Ir∗ + Zss Is Is∗ + Zrs Is Ir∗ + Zsr Ir Is∗ ] = 0
(5.24)
Poiché per la 5.23 i primi due termini sono sempre nulli e la giunzione é supposta reciproca (nel
significato definito nel primo teorema), si ha:
<[Zrs (Is Ir∗ + Ir Is∗ )] = 0
(5.25)
Poiché (Is Ir∗ + Ir Is∗ ) é reale dovrá essere:
<[Zrs ] = 0
(5.26)
Il teorema é cosı́ dimostrato per tutti gli elementi della matrice [Z]. Della stessa proprietá godrá la
matrice [Y ], sua inversa.
5.2.2
Proprietá della matrice [S]
L’utilizzo delle matrici [Z] ed [Y ] é agevole per giunzioni interconnesse con linee di trasmissione in
senso stretto. In tal caso sono definibili tensioni e correnti fisiche sulle porte e le matrici dipendono
soltanto dagli elementi interni alla giunzione. Per le guide d’onda, é piú agevole l’utilizzo della matrice
di scattering. Quest’ultima dipende sia dalle proprietá degli elementi interni alla giunzione, sia da
quelle delle strutture guidanti che alla giunzione afferiscono. Poiché, in generale le strutture guidanti
che afferiscono alle porte possono essere diverse tra loro, una proprietá simile a quella dimostrata
per le matrici [Z] ed [Y ] col primo teorema di 5.2.1, basata su condizioni riguardanti soltanto il
materiale interno alla giunzione, non é immediatamente estendibile alla matrice [S]. Tuttavia, si
puó dimostrare che le proprietá di simmetria delle matrici [Z] ed [Y ] di giunzioni reciproche sono
estendibili alla matrice [S] se, una volta attribuiti i valori alle impedenze caratteristiche delle linee
equivalenti che afferiscono alla giunzione (vedasi parte finale del Paragrafo 5.1), si definiscono le onde
di tensione e corrente normalizzate secondo le:
V̂k+
=
q
Vk+ /
ZCk
q
V̂k− = Vk− / ZCk
Iˆk+ = Ik+ ·
q
Iˆk− = Ik− ·
q
ZCk
ZCk
(5.27)
dove k é l’indice della generica linea equivalente e ZCk la corrispondente impedenza caratteristica.
Sará, evidentemente, V̂k+ = Iˆk+ e V̂k− = Iˆk− . Saranno definibili matrici normalizzate [Ẑ] e [Ŝ] tali che:
ˆ = [Ẑ]([Iˆ+ ] − [Iˆ− ])
[V̂ ] = [V̂ + ] + [V̂ − ] = [Ẑ][I]
(5.28)
[V̂ − ] = [Ŝ][V̂ + ]
(5.29)
57
É agevole verificare che:
Zij
Ẑij = q
ZCi ZCj
(5.30)
s
ZCj
(5.31)
ZCi
La 5.30 indica che, anche se ZCj 6= ZCi , la normalizzazione non altera le proprietá di simmetria di cui
eventualmente gode la matrice [Z]. La 5.31 indica invece che, sulla matrice [S], la normalizzazione
modifica la relazione tra due elementi in posizione simmetrica rispetto alla diagonale principale. Si
puó dimostrare, utilizzando l’algebra matriciale, che, se vale il primo teorema del Paragrafo 5.2.1, é
anche:
Ŝij = Ŝji
(5.32)
Ŝij = Sij
Se, peró, ZCj 6= ZCi , sará Sij 6= Sji .
Supponiamo, ora, di avere una giunzione priva di perdite (Fig. 5.4).
La somma delle potenze trasportate dalle onde entranti dovrá essere uguale alla somma delle
potenze trasportate dalle onde uscenti:
N
X
Pi− =
i
N
X
Pj+
(5.33)
j
Quindi:
N
N
1X
1X
Vi− Ii−∗ =
V + I +∗
2 i
2 j j j
(5.34)
Usando variabili normalizzate si ha, per le 5.27:
N
X
|V̂i− |2
=
i
N
X
j
58
|V̂j+ |2
(5.35)
Per la definizione di matrice [Ŝ] si ha:
N X
N
X
|
i
Ŝij V̂j+ |2 =
j
N
X
|V̂j+ |2
(5.36)
j
La 5.36 dovrá valere per qualsiasi alimentazione della giunzione. In particolare, se alimentiamo la
giunzione sulla sola linea k si dovrá avere:
• V̂j+ = 0 per j 6= k
• V̂j+ 6= 0 per j = k
Quindi dovrá essere:
N
X
|Ŝik V̂k+ |2 = |V̂k+ |2
(5.37)
i
La 5.37 comporta che:
N
X
|Ŝik |2 =
N
X
∗
Ŝik Ŝik
=1
(5.38)
i
i
La 5.36 dovrá valere anche se alimentiamo la giunzione su due sole linee, a cui attribuiamo gli indici
r ed s. Si avrá, in tal caso:
• V̂j+ = 0 per j 6= r, j 6= s
• V̂j+ 6= 0 per j = r ovvero j = s
Per la 5.36 si dovrá avere:
N
X
|Ŝir V̂r+ + Ŝis V̂s+ |2 = |V̂r+ |2 + |V̂s+ |2
(5.39)
i
D’altronde é, tenendo conto della 5.37:
N
X
|Ŝir V̂r+ + Ŝis V̂s+ |2 =
N
X
i
i
=
N
X
(Ŝir V̂r+ + Ŝis V̂s+ )(Ŝir V̂r+ + Ŝis V̂s+ )∗
|Ŝir V̂r+ |2 +
N
X
i
|Ŝis V̂s+ |2 +
i
= |V̂r+ |2 + |V̂s+ |2 +
N
X
i
N
X
∗ + +∗
Ŝir Ŝis
V̂r V̂s +
∗ + +∗
Ŝir Ŝis
V̂r V̂s +
N
X
i
N
X
∗ + +∗
Ŝis Ŝir
V̂s V̂r
∗ + +∗
V̂s V̂r
Ŝis Ŝir
(5.40)
i
i
Combinando la 5.40 con la 5.39 si dovrá avere:
N
X
∗ + +∗
Ŝir Ŝis
V̂r V̂s +
i
N
X
∗ + +∗
Ŝis Ŝir
V̂s V̂r = 0
(5.41)
i
Consideriamo ora due sottoipotesi.
1. V̂s+ = V̂r+
Dovrá essere, per la 5.41:
N
X
∗
∗
(Ŝir Ŝis
+ Ŝis Ŝir
)=0
i
59
(5.42)
2. V̂s+ = j V̂r+
Dovrá essere, per la 5.41:
N
X
∗
∗
)=0
− Ŝis Ŝir
(Ŝir Ŝis
(5.43)
i
Le 5.42 e 5.43 derivano dalla 5.36, che deve valere sotto qualsiasi ipotesi relativa alle V̂j+ . Pertanto
devono essere compatibili tra loro. Tale compatibilitá sussiste solo se:
N
X
∗
(Ŝis Ŝir
)=0
(5.44)
i
Le 5.38 e 5.44 esprimono le proprietá di cui deve godere la matrice [Ŝ] di una giunzione priva di
perdite. La 5.38 deve valere per ogni colonna, mentre la 5.44 deve valere per ogni coppia di colonne.
Se la giunzione é reciproca, la [Ŝ] é simmetrica e condizioni simili alle 5.38 e 5.44 dovranno valere
anche sulle righe. Le 5.38 e 5.44 implicano che la matrice [Ŝ] sia ”unitaria”, cioé che:
[Ŝ]t [Ŝ]∗ = [U ]
(5.45)
[Ŝ]∗ = [Ŝ]−1
t
(5.46)
Ovvero:
Per concludere sulle proprietá generali della matrice [S] consideriamo ora gli effetti di una traslazione
delle porte elettriche lungo le linee equivalenti. Sia dk la traslazione della k-esima porta. Supponiamo
0
che le linee siano prive di perdite. Dette [S ] ed [S] le matrici che si hanno prima e dopo della
traslazione, rispettivamente, si avrá, per gli elementi della diagonale principale:
0
Skk = Skk exp(−2jβk dk )
(5.47)
Per gli altri elementi, invece, si ha:
0
Sij = Sij exp[−j(βi di + βj dj )]
5.3
(5.48)
Giunzioni ad una porta
Il caso piú semplice di circuito (giunzione) é quello in cui é presente una sola linea equivalente
terminata, cioé N = 1 (Fig. 5.5).
Tale linea equivalente potrá rappresentare una linea di trasmissione in senso stretto, oppure
un singolo modo che si propaga in una guida d’onda. La linea equivalente si interconnette alla
terminazione sulla porta. Lungo la linea sono definibili le V , V + , V − , I, I + I − , fisiche o equivalenti
a seconda del tipo di linea. Sulla porta (z = 0) si ha:
V = V++V−
I = I+ − I−
(5.49)
Le matrici [Z] e [Y ] definite nel paragrafo 5.2 si riducono ad un solo elemento, che é l’impedenza Zin , o
ammettenza Yin , d’ingresso. Le matrici normalizzate [Ẑ] e [Ŷ ] si riducono agli elementi Ẑin = Zin /ZC
e Ŷin = Yin /Yc , dove ZC e Yc sono l’impedenza e l’ammettenza caratteristiche della linea.
60
La matrice [S] si riduce al coefficiente di riflessione in tensione ΓV . Sulla porta, valgono le
espressioni giá note dalla teoria delle linee di trasmissione terminate:
V++V−
V
= +
I
I − I−
(5.50)
V−
V+
(5.51)
V++V−
1 + ΓV
=
+
−
V −V
1 − ΓV
(5.52)
Zin =
ΓV =
Ẑin =
Nel caso di linea di trasmissione in senso stretto, le Zin , ΓV e Ẑin sono tutte univocamente definibili.
Nel caso di linea equivalente ad un modo in una guida, non sono univocamente definibili Zin e Zc, ma
il loro rapporto deve soddisfare la 5.52. In tal caso si calcola, o si misura, ΓV , dopodiché si ottiene
Ẑin dalla 5.52.
Le Ẑin e Ŷin hanno un’interpretazione energetica. Detta Pa la potenza assorbita dalla giunzione,
si ha:
1 ∗ 1 ˆ∗
V I = V̂ I = Pa + 2jω(Wm − We )
(5.53)
2
2
ˆ Si ha, quindi:
D’altronde é V̂ = Ẑin I.
1
Ẑin IˆIˆ∗ = Pa + 2jω(Wm − We )
2
Ẑin =
Pa + 2jω(Wm − We )
= R̂ + j X̂
1 ˆ ˆ∗
I
I
2
(5.54)
(5.55)
In modo analogo si puó dimostrare che:
Ŷin =
Pa − 2jω(Wm − We )
= Ĝ + j B̂
1
V̂ V̂ ∗
2
61
(5.56)
Le 5.55 e 5.56 indicano che, se la giunzione é priva di perdite, le Ẑin e Ŷin sono puramente immaginarie.
In tal caso, si ha anche |ΓV | = 1. Se Wm > We la terminazione sará induttiva. Se Wm < We , sará
capacitiva.
5.4
Giunzioni a due porte
Il caso N = 2 (Fig. 5.6) riveste particolare interesse perché importanti dispositivi a microonde
possono essere descritti come giunzioni a due porte.
5.4.1
La matrice [Z]
La giunzione puó essere rappresentata con la matrice [Z], a cui corrisponde la seguente coppia di
relazioni:
V1 = Z11 I1 + Z12 I2
V2 = Z21 I1 + Z22 I2
(5.57)
Z21 = Z12
(5.58)
Se la giunzione é reciproca si avrá:
Se é anche priva di perdite, i quattro elementi della matrice [Z] (o della matrice [Y ]) saranno puramente immaginari. Un caso notevole é quello in cui Z22 = Z11 . La giunzione é allora detta
”simmetrica”.
Esempio
Un caso particolare di giunzione reciproca e simmetrica é quello mostrato in Fig. 5.7.
62
La giunzione é semplicemente costituita da un tratto di linea di trasmissione di lunghezza d,
costante di propagazione β e impedenza caratteristica ZC . Si avrá:
V1 =
I1 I2 =0
Z11
(5.59)
Per le formule delle linee di trasmissione terminate, per ZL → ∞ si ha:
Z11 = −jZC cot βd
(5.60)
Z22 = Z11
(5.61)
Per ovvie ragioni di simmetria sará:
Si avrá, poi:
V2 I1 I2 =0
Z21 =
(5.62)
Prendendo l’origine dell’asse z sulla porta 2 si avrá:
Z21 =
V+
ZC
V++V−
V−
exp(jβd) − ZC exp(−jβd) (5.63)
I2 =0
Se I2 = 0, ΓV = 1 e V − = V + . Si ha quindi:
Z21 =
2V +
−jZC
=
V+
sin βd
[exp(jβd) − exp(−jβd)]
ZC
Per la reciprocitá della giunzione si avrá poi: Z12 = Z21 .
63
(5.64)
5.4.2
La matrice [S]
Rappresentando la giunzione di Fig. 5.7 con la matrice [S] si avrá:
V1− = S11 V1+ + S12 V2+
V2− = S21 V1+ + S22 V2+
(5.65)
Si ha:
S11 =
V1− V1+ V + =0
S22 =
V2− V2+ V + =0
2
1
Pertanto, gli elementi della diagonale principale coincidono con i coefficienti di riflessione in tensione
su ciascuna delle due porte quando sull’altra non c’é tensione entrante. Se la giunzione é reciproca,
Ŝ21 = Ŝ12 . Se é anche ZC2 = ZC1 si avrá: S21 = S12 .
Se la giunzione é priva di perdite:
∗
∗
Ŝ11 Ŝ11
+ Ŝ21 Ŝ21
=1
∗
∗
Ŝ12 Ŝ12 + Ŝ22 Ŝ22 = 1
∗
∗
Ŝ11 Ŝ12
+ Ŝ21 Ŝ22
=0
(5.66)
Se la giunzione é anche simmetrica, si ha Ŝ11 = Ŝ22 .
Supponiamo ora che la giunzione sia reciproca, simmetrica e priva di perdite. Per alcuni componenti, si tratta di ipotesi approssimativamente verificate. Si avrá:
Ŝ22 = Ŝ11 = |Ŝ11 | exp(jθ11 )
Ŝ12 = Ŝ21 =
q
1 − |Ŝ11 |2 exp(jθ12 )
q
Ŝ11 1 − |Ŝ11 |2 · [exp(jθ11 ) exp(−jθ12 ) + exp(−jθ11 ) exp(jθ12 )] = 0
(5.67)
(5.68)
(5.69)
Moltiplicando per exp(jθ11 ) exp(jθ12 ) si ottiene:
exp(2jθ11 ) = − exp(2jθ12 )
(5.70)
2θ12 = 2θ11 − π ± 2nπ
(5.71)
θ12 = θ11 − π/2 ± nπ
(5.72)
Se ne deduce che, se la giunzione é reciproca, simmetrica e priva di perdite, é sufficiente misurare
Ŝ11 e θ11 per caratterizzarla in modo completo.
Nel seguito, saranno mostrati due esempi molto particolari di giunzioni 2-porte.
64
Primo esempio
Il primo esempio (Fig. 5.8) é costituito dalla interconnessione di due tratti di linea di trasmissione
in senso stretto, aventi impedenze caratteristiche ZC1 e ZC2 note e diverse tra loro.
Le porte della giunzione saranno ambedue localizzate sulla interconnessione, la prima rivolta verso
sinistra, la seconda verso destra.
Gli elementi S11 ed S22 saranno i coefficienti di riflessione per onde provenienti da sinistra e da
destra, rispettivamente. Si avrá:
S11 =
ZC2 − ZC1
V1− =
+ V1 V + =0 ZC2 + ZC1
S22 =
V2− V2+ V + =0
2
=
1
Si avrá inoltre:
ZC1 − ZC2
ZC1 + ZC2
V1− = +
V2 V + =0
(5.73)
S12
(5.74)
1
Se V1+ = 0, sulla interconnessione si avrá:
V = V1− = V2+ + V2−
(5.75)
Quindi:
S12 = 1 + S22 =
2ZC1
ZC1 + ZC2
(5.76)
S21 = 1 + S11 =
2ZC2
ZC1 + ZC2
(5.77)
Analogamente:
65
Poiché ZC2 6= ZC1 si ha S21 6= S12 .
Effettuando la normalizzazione 5.27 e tenendo conto della 5.31 si ha:
Ŝ11 = S11
Ŝ22 = S22
√
ZC2
2 ZC2 ZC1
= S12
=
ZC1
ZC1 + ZC2
s
√
2 ZC1 ZC2
ZC1
=
= Ŝ12
= S21
ZC2
ZC1 + ZC2
s
Ŝ12
Ŝ21
(5.78)
Secondo esempio
Il secondo esempio é costituito dalla interconnessione tra due tratti illimitati di guida d’onda aventi
la stessa sezione ma riempite di dielettrici con costanti dielettriche, 1 e 2 , diverse tra loro (Fig. 5.9).
Supponiamo, per semplicitá, che si abbia un solo modo sia a sinistra che a destra. Si avranno due
porte elettriche, ambedue localizzate sull’interconnessione, la prima rivolta verso sinistra, la seconda
verso destra. Il problema presenta analogie con quello del primo esmpio, ma con la fondamentale
differenza che, in questo caso, non sono definibili a priori le impedenze caratteristiche. Il problema
puó essere risolto soltanto a partire dalle condizioni che la giunzione impone sui campi E ed H. In
particolare, essendo la giunzione piana, dovranno essere soddisfatte le condizioni di continuitá delle
componenti tangenziali. Si assuma il sistema di riferimento mostrato nella Fig. 5.10.
Nella guida di sinistra si avrá:
E1 = C1+ (e1 + ez1 ) exp(−jβ1 z) + C1− (e1 − ez1 ) exp(jβ1 z)
H1 = C1+ (h1 + hz1 ) exp(−jβ1 z) + C1− (−h1 + hz1 ) exp(jβ1 z)
Nella guida di destra si avrá:
E2 = C2+ (e2 − ez2 ) exp(jβ2 z) + C2− (e2 + ez2 ) exp(−jβ2 z)
66
H2 = C2+ (−h2 + hz2 ) exp(jβ2 z) + C2− (h2 + hz2 ) exp(−jβ2 z)
Supponiamo di alimentare la sola guida di sinistra (C2+ = 0). Per le condizioni di continuitá delle
componenti tangenziali dei campi E ed H si avrá, per z = 0:
(C1+ + C1− )e1 = C2− e2
(5.79)
(C1+ − C1− )h1 = C2− h2
(5.80)
e1 = Zw1 h1
(5.81)
e2 = Zw2 h2
(5.82)
Si ha inoltre:
Zw1 e Zw2 sono le impedenze d’onda nei tratti 1 e 2, rispettivamente. Sostituiamo le 5.81 e 5.82 nella
5.79. Successivamente, dividiamo la 5.79 per la 5.80. Si ottiene:
Risolvendo:
Quindi:
C1+ + C1−
Zw1 = Zw2
C1+ − C1−
(5.83)
C1−
Zw2 − Zw1
+ =
C1
Zw2 + Zw1
(5.84)
V − C − Zw2 − Zw1
= 1+ = 1+ =
V1 V + =0
C1 C + =0 Zw2 + Zw1
S11
2
(5.85)
2
Procedendo analogamente, si puó dimostrare che:
S22 =
Zw1 − Zw2
= −S11
Zw1 + Zw2
67
(5.86)
Si ha, inoltre:
C − = 2+ C1 C + =0
S21
(5.87)
2
Procedendo come per il primo esempio, si ottiene:
S21 = 1 + S11 =
2Zw2
Zw1 + Zw2
(5.88)
2Zw1
(5.89)
Zw1 + Zw2
La analogia formale tra le 5.86, 5.88, 5.89 e le 5.73, 5.76, 5.77 dimostra che, per giunzioni costituite
da interfacce dielettriche piane, é corretto attribuire alle linee equivalenti impedenze caratteristiche
uguali alle impedenze d’onda dei modi che tali linee equivalenti rappresentano.
É facile verificare che, come nel caso del primo esempio, dopo aver attribuito valori corretti alle
impedenze caratteristiche delle linee equivalenti ed aver effettuato la normalizzazione (5.27), si ottiene
Ŝ21 = Ŝ12 .
S12 = 1 + S22 =
68
Capitolo 6
ADATTAMENTO A
TRASFORMATORE
6.1
Trasformatori a 1 sezione
Semplici tecniche di adattamento, basate sul principio dello stub, sono state descritte nel corso di
Microonde 1. Nelle strutture guidanti è utilizzata anche un’altra tecnica, detta “a trasformatore”.
La struttura più semplice di trasformatore è mostrata in Figura 6.1.
Una linea di trasmissione, di impedenza caratteristica ZC0 , è collegata ad un carico, di impedenza
ZL , con un tratto intermedio di linea avente lunghezza λ/4 e impedenza caratteristica ZC1 . In base
alle formule valide per le linee terminate, l’impedenza Zin0 che si ha all’ingresso guardando verso il
carico è data da:
Z2
(6.1)
Zin0 = C1
ZL
Se si dimensiona il tratto intermedio in modo che:
ZC1 =
q
ZC0 ZL
(6.2)
si ottiene Zin0 = ZC0 , cioè l’adattamento.
Il limite di questa tecnica è che, detta l la lunghezza del tratto intermedio, la condizione l = λ/4
è valida solo ad una singola frequenza. Nella realtà, i sistemi operano in una banda centrata intorno
ad una frequenza centrale. Supponiamo, in particolare, di avere una linea in senso stretto operante
intorno ad una frequenza centrale f◦ , e di dimensionare il tratto intermedio in modo che, per f = f◦ ,
sia:
c
λ
(6.3)
l= =
4
4f◦
(c è la velocità di propagazione). Si avrà, per f = f◦ :
θ = βl =
π
2
(6.4)
All’interno della banda sarà, in generale f 6= f◦ . Quindi:
θ = βl =
2πf
πf
=
c
2 f◦
69
(6.5)
È possibile dimostrare con vari passaggi algebrici che, in prossimità di θ = π/2, il modulo del
coefficiente di riflessione è dato, approssimativamente, da:
ρ = |ΓV | =
Zin0 − ZC0
|ZL − ZC0 |
' √
|cos θ|
Zin0 + ZC0
2 ZL ZC0
(6.6)
Per f = f◦ , θ = π/2 e si ha adattamento. Per piccole variazioni di θ rispetto al valore di
π/2 si avrà l’andamento di Figura 6.2 caratterizzato da forti pendenze della funzione ρ(θ). Nelle
applicazioni, invece, si vuole avere:
ρ ≤ ρm
(6.7)
all’interno di una banda, che può essere più o meno ampia (ρm è definibile come il valore massimo
tollerato). Per realizzare questo obiettivo, è necessario ricorrere a tecniche più complesse, utilizzanti
trasformatori a N sezioni. Il funzionamento di tali trasformatori si basa su un’approssimazione, detta
di “piccole riflessioni” , che sarà descritta nel successivo paragrafo.
6.2
L’approssimazione di piccole riflessioni
Sia dato il circuito mostrato in Figura 6.3, costituito da:
• una linea di trasmissione, di impedenza caratteristica ZC0 ;
• un tratto intermedio di lunghezza l, costante di propagazione β, e impedenza caratteristica
ZC1 ;
• un carico ZL .
Definiamo:
70
71
• ΓV 1 e ΓV 2 i coefficienti di riflessione che si avrebbero sull’interfaccia di sinistra se il tratto
intermedio fosse illimitato a destra;
• ΓV 3 il coefficiente di riflessione che si avrebbe sul carico se il tratto intermedio fosse illimitato
a sinistra.
Definiamo inoltre, con T10 e T01 , i corrispondenti coefficienti di trasmissione sull’interfaccia di
sinistra (possono essere visti come elementi S21 e S12 della giunzione due porte che rappresenta
l’interfaccia di sinistra). Si ha:
ZC1 − ZC0
ZC1 + ZC0
ΓV 2 = −ΓV 1
ZL − ZC1
ΓV 3 =
ZL + ZC1
2ZC1
T10 =
ZC1 + ZC0
2ZC0
T01 =
ZC1 + ZC0
ΓV 1 =
(6.8)
(6.9)
(6.10)
(6.11)
(6.12)
Poniamo θ = βl . Il coefficiente di riflessione totale all’interfaccia di sinistra si ottiene sommando i
contributi delle varie onde che subiscono un numero crescente di riflessioni multiple alle due interfacce.
Si ha, cioè:
ΓV
= ΓV 1 + T01 T10 ΓV 3 exp(−j2θ) + T01 T10 Γ2V 3 ΓV 2 exp(−j4θ) + ...
= ΓV 1 + T01 T10 ΓV 3 exp(−j2θ)[
∞
X
ΓnV 2 ΓnV 3 exp(−j2nθ)]
(6.13)
n=0
I termini della sommatoria in 6.13 sono quantità complesse di modulo minore di 1. Si ha quindi una
serie, per la quale vale la:
∞
X
rn = (1 − r)−1
(6.14)
T01 T10 ΓV 3 exp(−j2θ)
1 − ΓV 2 ΓV 3 exp(−j2θ)
(6.15)
n=0
Si ottiene quindi, dalle 6.13 e 6.14 :
ΓV = ΓV 1 +
Supponiamo ora che le riflessioni siano “piccole”, cioè:
|ΓV 1 | = |ΓV 2 | 1
|ΓV 3 | 1
(6.16)
Sotto tale ipotesi si avrà:
ΓV ' ΓV 1 + ΓV 3 exp(−j2θ)
(6.17)
La 6.17, che è detta “approssimazione di piccole riflessioni”, corrisponde a considerare i soli primi
due termini della 6.13 trascurando le riflessioni multiple di ordine superiore.
72
6.3
Trasformatore ad N sezioni
Si abbia (Figura 6.4) una linea di impedenza caratteristica ZC0 connessa ad un carico di impedenza ZL (che supponiamo, per semplicità, reale) con N tratti intermedi (sezioni) aventi impedenze
caratteristiche ZC1 , ZC2 , ....ZCN . Detta n la generica sezione, i tratti intermedi siano dimensionati in
modo che i prodotti βn ln siano tutti uguali tra loro. Siano ΓV 0 , ΓV 1 , ... ΓV N i coefficienti di riflessione
“parziali” (cioè quelliche si avrebbero se le corrispondenti linee fossero illimitate). Essendo reali sia
la ZL che le ZCn , i coefficienti di riflessione saranno reali. Si avrà allora:
ZC1 − ZC0
ΓV 0 = ρ0 =
ZC1 + ZC0
..............
ZC(n+1) − ZCn
ΓV n = ρn =
ZC(n+1) + ZCn
..............
ZL − ZCN
ΓV N = ρN =
ZL + ZCN
(6.18)
Supponiamo di realizzare il trasformatore in modo che le ZCn abbiano valori ordinati in ordine
crescente o decrescente. Si avranno quindi due casi:
1. Se ZL > ZC0 si avrà ZC1 > ZC0 , ZC2 > ZC1 ,...ZC(n+1)) > ZCn ,...ZL > ZCN , e i ρn saranno tutti
positivi.
2. Se ZL < ZC0 si avrà ZC1 < ZC0 , ZC2 < ZC1 ,...ZC(n+1)) < ZCn ,...ZL < ZCN , e i ρn saranno tutti
negativi.
Supponiamo inoltre che N sia sufficientemente alto (ovvero ZL non troppo diverso da ZC0 ) in
modo da rendere legittima l’approssimazione di piccole riflessioni (par. 5.2) su ogni interfaccia. Il
coefficiente di riflessione totale sarà quindi dato da:
ΓV = ρ0 + ρ1 exp(−j2θ) + ρ2 exp(−j4θ) + ...ρN exp(−j2N θ)
73
(6.19)
Le tecniche che considereremo sono basate sul concetto di trasformatore “simmetrico”. Cioè, si
dimensioneranno le ZCn in modo da avere:
ρ0 = ρN
ρ1 = ρN −1
ρ2 = ρN −2
..............
ρn = ρN −n
(6.20)
Combinando la 6.19 con le 6.20 si ha:
ΓV
= exp(−jN θ){ρ0 [exp(jN θ) + exp(−jN θ)] + ρ1 [exp(j(N − 2)θ) + exp(−j(N − 2)θ)] + ...}
= 2 exp(−jN θ)[ρ0 cos N θ + ρ1 cos(N − 2)θ + ...ρn cos(N − 2n)θ...]
(6.21)
• Se N è dispari si avranno (N + 1)/2 termini, l’ultimo dei quali varrà ρ(N −1)/2 cos θ.
• Se N è pari si avranno N/2 termini, l’ultimo dei quali varrà (1/2)ρN/2 .
La 6.19 (con le condizioni 6.20) e la 6.21 rappresentano due possibili espressioni algebriche del coefficiente di riflessione in presenza di trasformatore a N sezioni simmetrico. Nel seguito, verranno
mostrate due tecniche per implementare le ZCn in modo da sintetizzare il trasformatore.
Il funzionamento del trasformatore è richiesto in un intervallo di frequenza compreso tra f1 =
f◦ −∆f /2 e f2 = f◦ +∆f /2 . Nel caso di linea di trasmissione in senso stretto, essendo β proporzionale
alla frequenza, possiamo definire le:
π f1
2 f◦
π f2
θ2 =
2 f◦
θ1 =
(6.22)
Si può verificare, come conseguenza della 6.20, che:
ΓV (
π
π
+ ∆θ) = ΓV ( − ∆θ)
2
2
(6.23)
In particolare:
ΓV (θ2 ) = ΓV (θ1 )
6.4
(6.24)
Trasformatore ad N sezioni binomiale
Una tecnica per ovviare al problema mostrato in Figura 6.2 è quella di sintetizzare i coefficienti dello
sviluppo 6.19, (o 6.21) in modo da far sı̀ che la funzione ρ(θ) = |ΓV (θ| sia piatta nell’intorno di
θ = π/2 (Figura 6.5).
Ciò si può ottenere imponendo che:
dn ρ
=0
(6.25)
dθn
per n = 0, 1 ,... , N − 1
La proprietà 6.25 è propria della funzione binomiale:
ΓV (θ) = A[1 + exp(−j2θ)]N
74
(6.26)
con
ρ(θ) = |ΓV (θ)| = A2N cosN θ
(6.27)
Vediamo ora come, dati N , ZC0 e ZL , è possibile dimensionare le ZCn di Figura 6.4 in modo che la
6.26 sia fatta coincidere con la 6.19. Il valore di A deve essere compatibile con la condizione che, in
assenza di sezioni intermedie (cioè per θ = βl = 0 ), si abbia:
ΓV (0) = A2N =
ZL − ZC0
ZL + ZC0
(6.28)
Dovrà quindi essere:
A = 2−N
ZL − ZC0
ZL + ZC0
(6.29)
Si può, inoltre, applicare la seguente espansione:
−N
ΓV (θ) = 2
N
X
ZL − ZC0
N
−N ZL − ZC0
[1 + exp(−j2θ)] = 2
CnN exp(−j2nθ)
ZL + ZC0
ZL + ZC0 n=0
(6.30)
CnN sono i coefficienti binomiali, dati da:
CnN =
N!
n!(N − n)!
(6.31)
È possibile verificare che la 6.30 può essere fatta coincidere con la 6.19 se si scelgono le ZCn in modo
da dar luogo a valori di ρn che soddisfano la:
ρn = ρN −n = 2−N
75
ZL − ZC0 N
C
ZL + ZC0 n
(6.32)
A questo punto, rimangono da calcolare le ZCn . Se è soddisfatta l’ipotesi di piccole riflessioni, si
può dimostrare che:
ZC(n+1) − ZCn
1 ZC(n+1)
ρn =
' ln
(6.33)
ZC(n+1) + ZCn
2
ZCn
(in pratica, è sufficiente che ZC(n+1) < 2ZCn per ogni n). Si avrà, allora:
ZC1 ' ZC0 exp(2ρ0 )
ZC2 ' ZC1 exp(2ρ1 )
..............
ZC(n+1) ' ZCn exp(2ρn )
(6.34)
Nella pratica, sono noti f1 ed f2 (ovvero θ1 e θ1 ) e il valore massimo tollerabile di ρ , che chiameremo
ρm . Si dimensiona la struttura con un certo N e si verifica se ρ(θ1 ) = ρ(θ1 ) < ρm . Se questa
condizione non è verificata, si aumenta il valore di N e si procede di nuovo al dimensionamento delle
ZCn .
6.5
Trasformatore a N sezioni di Chebychev
Poichè è richiesto di avere ρ < ρm all’interno di un intervallo di frequenza f1 < f < f2 (ovvero
θ1 < θ < θ2 ), una tecnica molto efficiente è quella basata sui polinomi di Chebychev. Infatti, tale
tecnica consente di ottenere un andamento ρ(θ) del tipo di quello diagrammato in Figura 6.6: sono
tollerati massimi relativi nell’intervallo θ1 < θ < θ2 ma, a parità di N e ρm , l’ampiezza dell’intervallo
è maggiore di quella che si ottiene con la tecnoica binomiale.
Fissati N e θ1 (ovvero θ2 ) la tecnica dei polinomi di Chebychev consiste nel dimensionare le
impedenze caratteristiche dei tratti intermedi in modo da sintetizzare il seguente andamento della
76
funzione ΓV (θ):
cos θ
)
(6.35)
cos θ1
TN (x) è il polinomio di Chebychev di ordine N . Al riguardo, si richiamano le seguenti espressioni:
ΓV (θ) = A exp(−jN θ)TN (
T1 (x) = x
T2 (x) = 2x2 − 1
T3 (x) = 4x3 − 3x
...
(6.36)
In generale:
Tn (x) = 2xTn−1 (x) − Tn−2 (x)
(6.37)
Tn (1) = 1
(6.38)
Inoltre:
Come conseguenza della 6.38 e della 6.24 si ha:
TN (cos θ/ cos θ1 ) = 1 per θ = θ1 e θ = θ2
Si può dimostrare che, nell’intervallo θ1 < θ < θ2 :
TN (
cos θ
)≤1
cos θ1
(6.39)
Vediamo ora come dimensionare le sezioni in modo da far sı̀ che l’espressione generale di un trasformatore simmetrico 6.21 sia fatta coincidere con la 6.35. Si utilizza la seguente espansione:
k
(cos θ)k = 2−k+1 [C0k cos kθ + C1k cos(k − 2)θ + ... + Cm
cos(k − 2m)θ + ...]
con
k
Cm
=
k!
m!(k − m)!
(6.40)
(6.41)
k
• Se k è dispari si avranno (k + 1)/2 termini, l’ultimo dei quali varrà C(k−1)/2
cos θ.
k
• Se k è pari si avranno k/2 termini, l’ultimo dei quali varrà (1/2)Ck/2
.
Sviluppando i termini della TN (cos θ/ cos θ1 ) secondo la 6.40, è possibile trovare i valori che devono
avere i ρn della 6.21 per far sı̀ che ogni termine della 6.35 coincida col corrispondente termine della
6.21. Supponendo valida anche in questo caso l’approssimazione di piccole riflessioni, le ZCn possono
essere poi sintetizzate con le 6.34. Il valore di A della 6.35 può essere ottenuto imponendo che, per
θ=0:
1
1
ZL
) ' ln
(6.42)
ΓV (0) = A TN (
cos θ1
2 ZC0
Quindi:
ln(ZL /ZC0 )
A=
(6.43)
2TN (1/ cos θ1 )
Si ha inoltre, per le proprietà precedentemente illustrate:
ρ(θ1 ) = ρ(θ2 ) = A
(6.44)
A titolo di esempio, vediamo come si risolve il problema partendo dal semplice caso N = 2.
77
Dati: ZL , ZC0 , θ1 , θ1 , ρm .
Fissiamo N = 2:
!2
!
cos θ
1 + cos 2θ
cos θ
=2
−1=
−1
T2
cos θ1
cos θ1
cos2 θ1
2
1
T2
=
−1
cos θ1
cos2 θ1
(6.45)
(6.46)
Tenendo conto delle 6.43 e 6.44 si ha:
ρ(θ1 ) = A =
ln(ZL /ZC0 )
2[2/(cos2 θ1 ) − 1]
(6.47)
Se ρ(θ1 ) > ρm occorre fissare N = 3 e ripartire. Se ρ(θ1 ) ≤ ρm si procede al dimensionamento del
trasformatore con N = 2, procedendo come segue.
Eguagliando la 6.21 con la 6.35, tenendo conto delle 6.45 e 6.46 si ha:
2ρ0 cos 2θ + ρ1 = ρ(θ1 )T2
cos θ
cos θ1
!
cos 2θ
1
= ρ(θ1 ) 2 + ρ(θ1 )
−1
cos θ1
cos2 θ1
(6.48)
Eguagliando termine a termine:
ρ0 =
1 ρ(θ1 )
2 cos2 θ1
ρ1 = ρ(θ1 )(
1
− 1)
cos2 θ1
(6.49)
Per il dimensionamento delle ZCn sono sempre valide le 6.34. Si ha quindi:
ZC1 ' ZC0 exp(2ρ0 )
ZC2 ' ZC1 exp(2ρ1 )
78
(6.50)
Capitolo 7
ALIMENTAZIONE DI STRUTTURE
GUIDANTI
7.1
Trattazione generale
Vediamo ora come può aver luogo la generazione di modi all’interno di strutture guidanti. Naturalmente, i modi avranno origine se saranno presenti generatori all’interno della struttura. I generatori
possono essere descritti come sorgenti impresse elettriche e/o magnetiche. Supponiamo che, lungo
una struttura guidante, in un tratto delimitato da due sezioni zA e zB , siano presenti distribuzioni
di correnti elettriche (J) e magnetiche (Jm ) (Figura 7.1).
Supponiamo che possano propagarsi N modi. Le espressioni dei campi generati dalle sorgenti J
e Jm saranno le seguenti.
• Propagazione verso destra (z > zB ):
E+
=
1
X
H+
1
X
Cn+ (en + ezn ) exp(−jβn z)
n
=
Cn+ (hn + hzn ) exp(−jβn z)
(7.1)
n
• Propagazione verso sinistra (z < zA ):
E−
=
1
X
H−
1
X
Cn− (en − ezn ) exp(jβn z)
n
=
Cn− (−hn + hzn ) exp(jβn z)
(7.2)
n
Nelle 7.1 e 7.2 le βn e le funzioni en , ezn , hn , hzn dipenderanno esclusivamente dal modo n. I
coefficienti Cn+ e Cn− , invece, dipenderanno anche dalle proprietà delle sorgenti. Il problema consiste
nel trovare i legami tra i Cn+ e Cn− e le J e Jm .
Supponiamo che, nella zona illimitata di destra (z > zB ) sia presente un’altra sorgente strutturata
in forma tale da generare il solo modo k-esimo. I campi dovuti a questa sorgente, propagantisi verso
sinistra, hanno la forma:
−
E−
= C◦k
(ek − ezk ) exp(jβk z)
2
−
−
H2 = C◦k (−hk + hzk ) exp(jβk z)
79
(7.3)
Applichiamo il teorema di reciprocità al volume delimitato dalle sezioni zA , zB e dalle pareti della
struttura. Tenendo conto che la sorgente 2 è esterna al volume, dalla 1.23 si avrà:
I
S
(E1 × H2 − E2 × H1 ) · ndS =
Z
V
(E2 · J − H2 · Jm )dV
(7.4)
Il volume V è racchiuso dalla superficie S che comprende le pareti della guida e le sezioni zA e zB .
Solo queste ultime contribuiscono all’integrale a primo membro. Inoltre, con considerazioni simili
a quelle del principio di ortogonalità dei modi, si può dimostrare che, data una generica sezione S◦
della struttura guidante e due modi r e s (con r 6= s) si ha:
Z
S◦
(Er × Hs ) · ndS = 0
(7.5)
Conseguentemente, solo il termine k-esimo delle somme 7.1 e 7.2 contribuirà all’integrale di superficie
a primo membro della 7.4. Dalla 7.4, tenendo conto delle considerazioni precedenti e prendendo
l’origine dell’asse z sulla sezione zB , si avrà:
Z
zB
Z
zA
Z
V
−
Ck+ C◦k
[(ek + ezk ) × (−hk + hzk ) − (ek − ezk ) × (hk + hzk )] · z◦ dS +
−
Ck− C◦k
exp(j2βk zA )[(ek − ezk ) × (−hk + hzk ) − (ek − ezk ) × (−hk + hzk )] · z◦ dS =
−
C◦k
(ek
− ezk ) exp(jβk z) · JdV −
Z
V
−
C◦k
(−hk + hzk ) exp(jβk z) · Jm dV
(7.6)
Si può osservare che il secondo termine del primo membro è nullo. Inoltre, le componenti ezk e hzk
negli integrali a primo membro non contribuiscono. Dalla 7.6, con le semplificazioni che derivano
dalle precedenti osservazioni, si perviene al cercato legame tra le sorgenti e i coefficienti di ampiezza
del modo. Poniamo:
Z
Pk = 2
(ek × hk ) · z◦ dS
(7.7)
zB
80
Il contributo delle correnti elettriche sarà dato da:
Ck+ (J)
1 Z
=−
(ek − ezk ) · J exp(jβk z) dV
Pk V
(7.8)
Il contributo delle correnti magnetiche sarà dato da:
Ck+ (Jm ) =
1 Z
(−hk + hzk ) · Jm exp(jβk z) dV
Pk V
(7.9)
Si avrà poi:
Ck+ = Ck+ (J) + Ck+ (Jm )
(7.10)
Un discorso analogo può essere sviluppato ponendo la sorgente 2 nella zona illimitata di sinistra e
considerando un modo da essa generato che si propaga verso destra. Si otterrà:
Ck− = Ck− (J) + Ck− (Jm )
(7.11)
con:
1 Z
(ek + ezk ) · J exp(−jβk z) dV
(7.12)
Pk V
1 Z
Ck− (Jm ) =
(hk + hzk ) · Jm exp(−jβk z) dV
(7.13)
Pk V
e con Pk dato sempre dalla 7.7.
Nel seguito, considereremo alcuni esempi di generazione del modo TE10 in guida rettangolare.
Per tale caso, i fattori che esprimono le dipendenze dei campi dalle coordinate trasverse sono:
Ck− (J) = −
β10
πx
sin
y◦
kc10
a
β10
πx
x◦
h=j
sin
kc10
a
πx
hz = cos
z◦
a
e = −jZw
Dalla 7.7 si avrà:
P10 = 2Yw
Z
0
a
Z
b
0
Zw2
2
2
β10
β10
2 πx
sin
dydx
=
abZ
w 2
2
kc10
a
kc10
(7.14)
(7.15)
(7.16)
(7.17)
Quindi, per le 7.8, 7.9, 7.12 e 7.13 si avrà:
jkc10 Z
πx
sin
y◦ · J exp(jβ10 z)dV
C (J) =
abβ10 V
a
Z
2
kc10
−jβ10
πx
πx
+
C (Jm ) =
[
sin
x◦ · Jm + cos
z◦ · Jm ] exp(jβ10 z)dV
2
abβ10 Zw V kc10
a
a
jkc10 Z
πx
−
C (J) =
sin
y◦ · J exp(−jβ10 z)dV
abβ10 V
a
Z
2
kc10
jβ10
πx
πx
−
C (Jm ) =
[
sin
x◦ · Jm + cos
z◦ · Jm ] exp(−jβ10 z)dV
2
abβ10 Zw V kc10
a
a
+
81
(7.18)
(7.19)
(7.20)
(7.21)
7.2
Accoppiamento tra coppia coassiale e guida d’onda
Sia data (Figura 7.2) una guida rettangolare, in cui si propaga il modo TE10 , illimitata verso destra
e delimitata a sinistra da una parete metallica collocata sull’ascissa z = −l. Intorno al punto
x = a/2, y = 0, z = 0 è presente un foro che consente l’accoppiamento con una coppia coassiale
parallela all’asse y, con il conduttore interno che penetra nella guida fino all’altezza y = d. Se I◦ è la
corrente nella coppia, nella parte finale del conduttore interno l’andamento della corrente può essere
approssimato con la funzione:
I(y) = I◦ sin k(d − y)
(7.22)
dove k è la costante di propagazione all’interno della coppia. Usando il metodo delle immagini, la
parete metallica (elettrica) a sinistra può essere sostituita con una distribuzione di corrente uguale
e opposta a quella dovuta al conduttore centrale del cavo, e collocata in z = −2l. Ai fini del calcolo
del campo per z > 0, la struttura è quindi equivalente a quella mostrata in Figura 7.3.
Le sorgenti impresse saranno:
J = J1 + J2 = I◦ sin k(d − y)δ(x − a/2)[δ(z) − δ(z + 2l)]y◦
Jm = 0
(7.23)
Per la 7.18 si ha:
C
+
Z d
jkc10 Z d
I◦ sin k(d − y)dy +
I◦ sin k(d − y) exp(−j2β10 l)dy
=
abβ10 0
0
jkc10 I◦
= −
· [exp(−j2β10 l) − 1] · (1 − cos kd)
abβ10 k
!
(7.24)
La potenza che si propaga in guida, tenendo conto delle formule relative al modo TE10 , sarà data da:
P =
Zw |I◦ |2
· |exp(−j2β10 l) − 1|2 · (1 − cos kd)2
4abk 2
82
(7.25)
L’impedenza vista dal cavo a y = 0 sarà:
Zin = R◦ + jX =
P + 2jω(Wm − We )
1
II ∗
2
(7.26)
Tenendo conto delle proprietà delle funzioni circolari:
R◦ =
2P
Zw
kd
=
· |exp(−j2β10 l) − 1|2 · tan2
∗
2
II
2abk
2
(7.27)
Scegliendo opportunamente l e d si può ottenere R◦ = ZC , dove ZC è l’impedenza caratteristica della
coppia. Inoltre, con tecniche a stub, si può cancellare la X in modo da realizzare l’adattamento.
7.3
7.3.1
Accoppiamenti tramite foro
Premessa
Supponiamo di avere due semispazi separati da una lastra metallica infinita con un foro di raggio
r◦ λ . Supponiamo che sia presente campo elettromagnetico in uno dei due semispazi. Per le
condizioni al contorno, le linee di flusso del campo elettrico si disporranno normalmente alla lastra
mentre quelle del campo magnetico saranno tangenziali. Aldilà del foro, come mostrato in Figura 7.4,
il campo elettrico sarà sempre normale alla lastra, producendo un effetto di tipo “dipolo”, mentre il
campo magnetico produrrà un effetto “spira”.
Si può dimostrare che, ai fini del calcolo del campo nel semispazio superiore di Figura 7.4, l’effetto
della lastra con foro è equivalente a quello che si avrebbe chiudendo il foro e collocando al suo posto
due dipoli equivalenti, elettrico e magnetico (Figura 7.5), di momenti dati da :
P = −◦ αe En1 δ(r − rf )
M = −µ◦ αm Ht1 δ(r − rf )
83
(7.28)
84
En1 e Ht1 sono i campi elettrico normale e magnetico tangenziale nel semispazio inferiore in
corrispondenza del foro. rf è il vettore di posizione che individua il foro. I coefficienti αe e αm sono
detti “fattori di polarizzabilità” elettrica e magnetica, rispettivamente. Ricordando che si è indicato
con r◦ il raggio del foro, è stato dimostrato che:
αe = −(2/3)r◦3
αm = (4/3)r◦3
(7.29)
Ai dipoli P ed M sono associate correnti date da:
J = jωP
Jm = jωM
7.3.2
(7.30)
Accoppiamento tra guida e cavità
Siano date (Figura 7.6) una cavità rettangolare ed una guida d’onda, anch’essa rettangolare. La
cavità e la guida hanno in comune una parete metallica, di sezione ab, e perpendicolare all’ asse z
lungo cui avviene la propagazione in guida. All’interno di tale parete comune è praticato un foro,
attraverso il quale la cavità è connessa alla guida. Le dimensioni della guida sono tali da consentire la
propagazione del solo modo TE10 . All’interno della cavità sarà presente un campo elettromagnetico
nelle forme proprie delle cavità risonanti. L’effetto del foro può essere rappresentato con la tecnica
descritta precedentemente. In questo caso, poichè abbiamo un modo TE, si avrà:
En1 = 0 =⇒ P = J = 0
(7.31)
Jm = jωM
(7.32)
Per la corrente magnetica si avrà:
85
con
M = −µ◦ αm Ht1 · δ(x − a/2)δ(y − b/2)δ(z)
(7.33)
La cavità rettangolare può essere vista come una guida rettangolare chiusa da pareti che producono
riflessioni. Quindi, per z < 0:
Ht1 = j
πx
C◦ β10
[exp(−jβ10 z) + exp(jβ10 z)] sin
x◦
kc10
a
(7.34)
C◦ è il coefficiente d’ampiezza delle oscillazioni nella cavità. In corrispondenza del foro (z = 0 ,
x = a/2):
2C◦ β10
Ht1 = j
x◦
(7.35)
kc10
Quindi:
2C◦ β10
· δ(x − a/2)δ(y − b/2)δ(z)x◦
(7.36)
M = −jµ◦ αm
kc10
Ai fini del calcolo del campo per z > 0, sussiste l’equivalenza indicata in Figura 7.7, con M data
dalla 7.36.
Applicando il metodo delle immagini sulla parete elettrica a z = 0, si ha l’ulteriore equivalenza
mostrata in Figura 7.8. Si avrà quindi una corrente magnetica impressa impulsiva equivalente,
collocata in corrispondenza del foro, data da:
Jm = j2ωM = 4ωµ◦ αm
C◦ β10
· δ(x − a/2)δ(y − b/2)δ(z)x◦
kc10
(7.37)
Si avrà infine, per la 7.19:
C + = C + (Jm ) = −j
86
4ωµ◦ αm C◦
abZw
(7.38)
7.3.3
Accoppiamento tra guide rettangolari
Un’altra importante applicazione dell’accoppiamento tramite foro è quella mostrata in Figura 7.9.
Due guide d’onda rettangolari di uguale sezione sono disposte parallelamente tra loro e sovrapposte
sul lato lungo. C’è un foro, collocato intorno al punto di coordinate x = d, z = 0. In generale,
d 6= a/2. Supponiamo che una delle due guide, per esempio quella inferiore, sia alimentata in modo
che su di essa si propaghi il modo TE10 nel verso delle z positive con coefficiente di ampiezza C◦+ . Si
avrà, in corrispondenza del foro:
πd
β10
sin )y◦
kc10
a
πd
πd
sin x◦ + cos z◦ )
a
a
En1 = C◦+ (−jZw
Ht1 = C◦+ (j
β10
kc10
(7.39)
In questo caso la presenza del foro avrà un effetto equivalente a quello di una coppia di dipoli, elettrico
e magnetico, e tutte e tre le componenti dei campi nella guida inferiore contribuiranno a generare i
campi nella guida superiore. Le correnti impresse equivalenti saranno:
β10
πd
sin )y◦ · δ(x − d)δ(y − b)δ(z)
kc10
a
β
πd
πd
10
= jωM = −jωµ◦ αm C◦+ (j
sin x◦ + cos z◦ ) · δ(x − d)δ(y − b)δ(z)
kc10
a
a
J = jωP = −jω◦ αe C◦+ (−jZw
Jm
(7.40)
Infine, tenendo conto delle 7.18-7.21 si ha:
jω◦ αe Zw C◦+
πd
sin2
ab
a
+
2
−jωµ◦ αm C◦
πd kc10
πd
C + (Jm ) =
(sin2
+ 2 cos2
)
abZw
a
β10
a
C + (J) =
87
(7.41)
(7.42)
C − (J) = C + (J)
2
−jωµ◦ αm C◦+
πd kc10
πd
C − (Jm ) =
(− sin2
+ 2 cos2
)
abZw
a
β10
a
88
(7.43)
(7.44)
Capitolo 8
DISPOSITIVI PASSIVI A
MICROONDE
8.1
Premessa
Nei sistemi utilizzanti le microonde, oltre alle strutture guidanti, sono presenti vari tipi di componenti
che possono avere diverse funzioni. Ad esempio: instradare correttamente la propagazione delle onde
tra le varie strutture guidanti, facilitare l’effettuazione di misure. I componenti che saranno qui
trattati sono rappresentabili come giunzioni N porte che si interfacciano con strutture guidanti. Nei
casi che considereremo, nelle strutture guidanti si propaga un solo modo, per cui N sarà sia il numero
di linee elettriche che il numero di linee fisiche. Considereremo componenti connessi sia con guida
d’onda che con struttura planare. Le proprietà e le funzioni saranno ben descritte dalla matrice S
della giunzione.
I componenti possono essere reciproci o non reciproci a seconda che la matrice normalizzata Ŝ
sia o meno simmetrica rispetto alla diagonale principale. Proprietà di non reciprocità possono essere
richieste per applicazioni varie. Per ottenerle, il componente presenterà al suo interno elementi di
ferrite, un materiale caratterizzato da permeabilità magnetica tensoriale.
In numerosi casi, all’interno dei componenti sono presenti sottili lamine dielettriche. È pertanto
utile una premessa sugli effetti di tali lamine. Data un’onda che si propaga, la presenza di una lamina
dielettrica produce effetti di sfasamento e di assorbimento. Gli effetti di sfasamento sono sempre
0
presenti e dipendono dalla r della lamina. Gli effetti di assorbimento sono presenti se la lamina è
00
dissipativa, cioè con apprezzabili valori di r . Ambedue gli effetti sono fortemente dipendenti dalla
posizione della lamina rispetto alle linee di flusso del campo elettrico.
Il caso (a) di Figura 8.1 è quello di lamina parallela alle linee di flusso di del campo E. Si ha una
forte interazione tra campo e correnti di spostamento della lamina, con conseguenti forti effetti di
sfasamento ed, eventualmente, di dissipazione. Al contrario, nel caso (b) di Figura 8.1, con lamina
perpendicolare alle linee di flusso, le interazioni e i conseguenti effetti saranno deboli.
Essendo le lamine inserite in strutture guidanti, gli effetti sono dipendenti anche dalla loro forma
rispetto alla dimensione longitudinale. Nel caso (a) di Figura 8.2 la transizione tra guida vuota e
guida riempita con la lamina è discontinua, con conseguenti forti riflessioni. Nei casi (b) e (c) di Figura
8.2 (lamina “rastremata”) la transizione è graduale: si avranno riflessioni deboli e domineranno gli
effetti di sfasamento (ed eventualmente dissipazione) descritti precedentemente.
89
90
8.2
8.2.1
Componenti a una porta
Terminazione adattata
La terminazione adattata è un circuito a una porta realizzato con l’obiettivo di dissipare la potenza
incidente, in modo da non avere riflessioni. Nel caso ideale si avrà:
S11 = ΓV = 0
(8.1)
Nella pratica, per esempio nel caso di connessione con guida d’onda rettangolare, la terminazione
può essere realizzata con lamina dissipativa rastremata, come indicato in Figura 8.3
Una buona terminazione adattata consente di ottenere ROS < 1.01 − 1.02
8.2.2
Corto circuito
All’altro estremo rispetto al caso del paragrafo precedente c’è il cortocircuito, cioè un circuito a una
porta che riflette tutta la potenza incidente. Nel caso ideale si avrà:
S11 = ΓV = exp(jφ11 )
(8.2)
con |S11 | = 1. La realizzazione pratica in guida d’onda rettangolare è mostrata in Figura 8.4. La
guida è chiusa da una parete metallica, per cui si avrà riflessione totale. La posizione della parete
è regolabile tramite un sistema di scorrimento graduato. Al variare di tale posizione, varierà la fase
φ11 .
91
8.3
8.3.1
Componenti reciproci a due porte
Attenuatore
Scopo dell’attenuatore è quello di introdurre un’attenuazione regolabile tra due porte. È molto usato
nei laboratori per misure a microonde. Nel caso ideale, è realizzato in modo da non avere riflessioni
sulle due porte. Si avrà:
q
0
1/A
(8.3)
[S] = q
1/A
0
A è l’attenuazione, spesso indicata in dB. Si ha:
A = 20 log
1
= −20 log |S21 |
|S21 |
(8.4)
Una semplice realizzazione in guida rettangolare con modo TE10 è descritta, in sezione, in Figura
8.5. C’è una lamina dielettrica dissipativa disposta verticalmente la cui distanza rispetto al lato
corto può essere regolata. Quando la lamina è sul lato corto, dove il campo elettrico è nullo, non
si ha interazione. L’effetto di interazione , con conseguente dissipazione, aumenta spostando la
lamina verso il centro del lato lungo. Per evitare riflessioni la lamina avrà, rispetto alla direzione
longitudinale, la forma rastremata mostrata in Figura 8.2.
Un’altra realizzazione di attenuatore è mostrata in Figura 8.6. Sono presenti, nelle due zone
laterali, transizioni da guida rettangolare a guida circolare, con due lamine dielettriche dissipative
disposte orizzontalmente (parallelamente al lato lungo della guida rettangolare). Al centro è presente
un tratto di guida circolare con una lamina dielettrica dissipativa la cui posizione angolare (θ) rispetto
all’asse della guida può essere regolata. Sia in guida rettangolare che in guida circolare si propagano
i soli modi fondamentali (TE10 e TE11 , rispettivamente). Supponiamo che si propaghi un’onda da
sinistra verso destra. Poichè nella guida di sinistra il campo è polarizzato parallelamente al lato
92
93
corto, la lamina di sinistra produrrà effetti deboli. Per ragioni di simmetria il campo elettrico in
guida circolare avrà la struttura del TE11 con asse di simmetria verticale (Figura 8.7).
Il campo elettrico in guida circolare avrà espressione (si considera solo il fattore che esprime la
dipendenza dalle coordinate trasverse):
0
0
0
p r
p 0 p r
1
e1 = C11 [ J1 ( 11 ) cos φr◦ − 11 J1 ( 11 ) sin φφ◦ ]
r
a
a
a
(8.5)
e1 = C11 [er cos φr◦ − eφ sin φφ◦ ]
(8.6)
Per brevità poniamo:
La configurazione di campo di Figura 8.7 può essere decomposta in due componenti, aventi
asse di simmetria parallelo e perpendicolare (rispettivamente) alla lamina, che saranno denominate
ek e e⊥ (Figura 8.8). Questa decomposizione può essere ottenuta applicando i seguenti sviluppi
trigonometrici (formule di “addizione e sottrazione”):
sin φ = sin(φ − θ + θ) = cos θ sin(φ − θ) + sin θ cos(φ − θ)
cos φ = cos(φ − θ + θ) = cos θ cos(φ − θ) − sin θ sin(φ − θ)
(8.7)
da cui:
e1 = C11 cos θ[er cos(φ − θ)r◦ − eφ sin(φ − θ)φ◦ ] − C11 sin θ[er sin(φ − θ)r◦ + eφ cos(φ − θ)φ◦ ]
= ek + e⊥
(8.8)
Durante il transito attraverso la lamina la componente ek subirà una forte attenuazione. All’uscita
si avrà la sola componente e⊥ che, a sua volta, può essere decomposta in due componenti (eV ed eH )
aventi asse di simmetria verticale ed orizzontale, rispettivamente (Figura 8.9). Si ha cioè, sempre per
le 8.7:
e⊥ = C11 sin2 θ[er cos φr◦ − eφ sin φφ◦ ] − C11 sin θ cos θ[er sin φr◦ + eφ cos φφ◦ ]
= e V + eH
94
(8.9)
95
Al passaggio dalla lamina di destra, la componente eH sarà fortemente attenuata, per cui si avrà
soltanto la componente eV . All’uscita si avrà quindi, ricordando la 8.6:
e2 = eV = e1 sin2 θ
(8.10)
|e2 |
= sin2 θ
|e1 |
(8.11)
Quindi:
|S21 | =
A = 20 log
1
= −40 log(sin θ)
|S21 |
(8.12)
Variando θ, si può quindi ottenere un’attenuazione regolabile.
8.3.2
Polarizzatore
Il polarizzatore ha la funzione di trasformare una polarizzazione lineare in circolare, e viceversa. Può
avere varie realizzazioni. In particolare, può essere costituito da un tratto di guida circolare con
una lamina dielettrica non dissipativa. La lamina è orientata a π/4 rispetto all’asse di simmetria
delle linee di flusso del campo elettrico incidente. Operando una decomposizione del tipo di quelle
descritte nel paragrafo precedente, si ha:
√
2
(E⊥ + Ek )
(8.13)
E1 =
2
Le componenti E⊥ ed Ek attraverseranno la lamina con costanti di propagazione, β1 e β2 rispettivamente, diverse tra loro. Si realizza la lamina di una lunghezza l tale da avere:
(β2 − β1 )l =
π
2
(8.14)
All’uscita della lamina si avrà:
√
E2 =
2
exp(−jβ1 l)(E⊥ − jEk )
2
(8.15)
La 8.15 è l’espressione di una configurazione di campo ruotante intorno all’asse (polarizzazione circolare). Variando di π/2 l’ orientazione della lamina, si otterrebbe un effetto analogo, ma con inversione
del verso di rotazione. Si può anche dimostrare agevolmente che l’effetto è reciproco: una configurazione di campo rotante (polarizzazione circolare) in ingresso produce una configurazione fissa
(polarizzazione lineare) in uscita.
8.3.3
Sfasatore
Scopo dello sfasatore è quello di introdurre un ritardo di fase regolabile tra due porte. Nel caso
ideale, è realizzato in modo da non avere riflessioni sulle due porte. Si avrà:
[S] =
0
exp(−j∆φ)
exp(−j∆φ)
Una tipica realizzazione è mostrata in fig. 8.10.
96
0
(8.16)
Similmente all’attenuatore di fig. 8.6, le due porte presentano interconnessioni in guida rettangolare, seguite da transizioni verso il tratto intermedio, che è in guida circolare. Anche in questo caso
si propaga solo il modo fondamentale, sia in guida rettangolare che in guida circolare. Sono presenti
tre lamine, in questo caso non dissipative. Le due lamine laterali hanno una posizione angolare fissa
a π/4 rispetto all’asse verticale, e fungono da polarizzatori (vedi paragrafo precedente). La lamina
centrale ha posizione angolare regolabile e lunghezza doppia rispetto a quella delle lamine fisse. Supponiamo che si propaghi un’onda da sinistra verso destra. Davanti alla prima lamina sarà presente
la distribuzione di campo propria del TE11 in guida circolare, con asse di simmetria delle linee di
flusso del campo E a simmetria verticale (come in Figura 8.7). Per caratterizzare gli effetti delle tre
lamine, opereremo decomposizioni simili a quelle descritte per l’attenuatore. Useremo le seguenti
notazioni.
• EV , EH :componenti del campo E con assi di simmetria verticale e orizzontale
• E45 , E135 : componenti del campo E con assi di simmetria orientati a 45◦ e 135◦ (cioè paralleli
e perpendicolari alle due lamine laterali);
• Ek , E⊥ :componenti del campo E con assi di simmetria parallelo e perpendicolare alla lamina
centrale (orientata a 45◦ + θ).
All’ingresso della prima lamina si ha:
√
2
(E135 + E45 )
2
All’uscita del primo polarizzatore, per la 8.15 si avrà:
√
2
E2 =
exp(−jβl)(E135 − jE45 )
2
E1 = EV =
97
(8.17)
(8.18)
Usando relazioni proprie delle funzioni trigonometriche in modo analogo a come visto per l’attenuatore, si può dimostrare che:
√
2
E2 =
exp(−jβ1 l − jθ)(E⊥ − jEk )
(8.19)
2
(Si tratta di una rotazione del sistema di riferimento che, in polarizzazione circolare, corrisponde a
una variazione di fase).
La lamina centrale, essendo di lunghezza doppia rispetto a quella dei polarizzatori, produrrà
ritardi di fase pari a:
• 2β1 l sulla componente E⊥
• 2β1 l + π sulla componente Ek
Alla sua uscita si avrà quindi:
√
E3 =
2
exp(−j3β1 l − jθ)(E⊥ + jEk )
2
(8.20)
Il campo avrà polarizzazione circolare, ma in verso opposto rispetto a E2 . Usando ancora relazioni
del tipo delle 8.7 si può dimostrare che:
√
2
exp(−j3β1 l − j2θ)(E135 + jE45 )
(8.21)
E3 =
2
(Si ha una nuova rotazione del sistema di riferimento, che produrrà lo stesso sfasamento del passaggio
dalla 8.18 alla 8.19, perchè si sono invertiti sia il verso della rotazione che quello della polarizzazione
circolare).
Infine, la terza lamina produrrà un effetto reciproco rispetto alla prima, ripristinando la polarizzazione lineare. Si avrà alla sua uscita:
√
2
E4 =
exp(−j4β1 l − j2θ)(E135 + E45 ) = E1 exp(−j4β1 l − j2θ)
(8.22)
2
Il campo in uscita presenterà, rispetto al campo in ingresso, uno sfasamento dato dalla combinazione
di una componente fissa e una regolabile, in quanto variabile linearmente con l’angolo θ.
8.4
8.4.1
Componenti reciproci a quattro porte
Aspetti generali
Circuiti a microonde presentano spesso, al loro interno, componenti a quattro porte. In generale, è
richiesto che sulle quattro porte non ci siano riflessioni e che ciascuna di esse sia accoppiata con due
soltanto tra le tre rimanenti. In pratica, l’obiettivo è quello di sintetizzare una giunzione 4-porte la
cui matrice S abbia uguali a zero gli elementi della diagonale principale e un altro elemento di ogni
riga (o colonna). In alcune applicazioni si vuole la realizzazione “bilanciata”, in cui le ampiezze degli
altri due elementi di ogni riga (o colonna) sono uguali tra loro. In altre applicazioni i due elementi
devono essere diversi. Nel primo caso si parla di “giunzioni ibride”, mentre nel secondo caso, più
generale, si parla di “accoppiatori direzionali”. Un’applicazione tipica dell’accoppiatore direzionale
è mostrata in Figura 8.11.
98
Un trasmettitore (T) invia potenza alla porta 1 per trasmetterla ad un carico (tipicamente un’antenna) attraverso la porta 2. Una parte di potenza è instradata verso la porta 3, da cui viene inviata
ad uno strumento di misura. La porta 4, dove nel caso ideale non dovrebbe pervenire potenza, è
comunque chiusa su una terminazione adattata, in modo da evitare riflessioni. La funzione del componente è quella di consentire la misura della potenza trasmessa, prelevandone una frazione sulla
porta 3. Nel caso ideale si avrebbe:
S11 = S41 = 0
|S21 | ' 1
|S31 | =
q
(8.23)
1 − |S21 |2
Indicando con Pi la potenza alla generica porta i, si definiscono:
• Fattore di accoppiamento:
C = 10 log
P1
1
= 20 log(
)
P3
|S31 |
(8.24)
D = 10 log
P3
|S31 |
= 20 log(
)
P4
|S41 |
(8.25)
• Direttività:
Nel caso ideale, D → ∞.
Supponiamo di avere una giunzione 4 porte reciproca e priva di perdite con:
S23 = S14 = 0
S11 = S22 = 0
ZC1 = ZC2 = ZC3 = ZC4
99
(8.26)
Si può dimostrare, utilizzando i teoremi propri delle giunzioni reciproche e prive di perdite, che una
giunzione che gode delle proprietà 8.27 è necessariamente un accoppiatore direzionale ideale. Si avrà:
[S] =
0 C1 C2 0
C1 0 0 C2
C2 0 0 C1
0 C2 C1 0
(8.27)
q
con |C2 | = 1 − |C1 |2 Le fasi degli elementi diversi da zero dipendono dalle posizioni delle porte
lungo le linee che afferiscono alla giunzione.
Se, invece, la giunzione 4 porte è reciproca, priva di perdite, e caratterizzata da:
S41
S31
S34
ZC1
=
=
=
=
0
S21
−S24
ZC2 = ZC3 = ZC4
(8.28)
si può dimostrare che dovrà necessariamente essere:
√ 0
2 1
[S] =
2 1
0
1 1
0
0 0
1
0 0 −1
1 −1 0
(8.29)
La 8.29 è la matrice S di una giunzione ibrida ideale.
8.4.2
Accoppiatore di Bethe
L’accoppiatore di Bethe è costituito da due guide d’onda rettangolari, in cui si propaga il modo
fondamentale TE10 , accoppiate tramite un foro. La struttura è stata già analizzata nel paragrafo
6.3. Per massimizzare la direttività dell’accoppiatore e ottenere contemporaneamente un prefissato
valore di accoppiamento, occorre disporre di un grado di libertà. Quest’ultimo può essere ottenuto
avendo la possibilità di variare la distanza d del foro dal lato corto delle guide, ovvero fissando il
foro al centro del lato lungo ma prevedendo la possibilità di una rotazione relativa tra le due guide
intorno ad un asse passante per il foro stesso (fig. 8.12 e 8.13).
Per il primo caso si applica direttamente la trattazione del paragrafo 6.3. L’effetto del foro è
equivalente a quello di correnti impresse impulsive J e Jm . Le corrispondenti relazioni tra i coefficienti
C + e C − e il coefficiente C◦+ sono dati dalle 7.41-7.44. Con riferimento alle 4 porte di fig. 8.12 si ha,
poi:
C + (J) + C + (Jm )
S31 =
(8.30)
C◦+
S41 =
C − (J) + C − (Jm )
C◦+
(8.31)
Per massimizzare la direttività è necessario far tendere a zero uno dei due tra S31 e S41 . Tale
obiettivo può essere raggiunto scegliendo opportunamente il parametro d, usando le 7.41-7.44 e 8.30.
100
101
Per il caso di fig. 8.13 valgono sempre le 8.30. I coefficienti C + (J), C + (Jm ), C − (J), C − (Jm ) sono
ottenibili a partire dalle 7.18-7.21 e 7.40 tenendo conto che, in questo caso:
πd
=1
a
πd
cos
=0
a
y◦ · J = |J|
x◦ · Jm = |Jm | cos θ
sin
(8.32)
Si ha, quindi:
jω◦ αe Zw C◦+
C (J) = C (J) =
ab
+
−jωµ
◦ αm C◦
C + (Jm ) = −C − (Jm ) =
cos θ
abZw
+
−
(8.33)
La massimizzazione della direttività sarà ottenibile dalle 8.30 e 8.33 scegliendo θ in modo da annullare
una delle due tra S31 ed S41 .
Le strutture disegnate in fig. 8.12, essendo basate su un unico foro, sono alquanto rigide e hanno
buone prestazioni solo in intervalli ristretti di frequenza. Per ottenere una maggiore flessibilità si
usano strutture in cui le due guide d’onda sono accoppiate mediante N fori. Scegliendo opportunamente il numero N , la distanza tra i fori e la distribuzione dei loro raggi, si può ottenere il desiderato
fattore di accoppiamento e una buona direttività, anche in ampi intervalli di frequenza. A titolo di
esempio, consideriamo il caso semplice di accoppiatore a due fori. La struttura, basata sempre su
due guide rettangolari, è mostrata in fig. 8.14. Supponiamo che i due fori siano uguali tra loro e
collocati a distanza l l’uno dall’altro. Per ciascuno dei due fori sia:
C+
C◦+
C−
=
C◦+
Bf =
Bb
(8.34)
Il fattore Bf è denominato “accoppiamento forward”, mentre il fattore Bb è denominato “accoppiamento backward”. Dalla porta 1 alla porta 3 si avranno due cammini, di uguale lunghezza l, passanti
rispettivamente per il primo ed il secondo foro. Dalla porta 1 alla porta 4 si avrà un passaggio diretto
attraverso il primo foro e un cammino di lunghezza 2l passante attraverso il secondo foro. Si avrà
quindi:
S31 = 2Bf exp(−jβl)
S41 = Bb [1 + exp(−j2βl)]
(8.35)
Per il fattore di accoppiamento e la direttività si avrà:
C = −20 log(2 |Bf |)
|Bf |
2 |Bf |
= 20 log
D = 20 log
|Bb | |1 + exp(−j2βl)|
|Bf | |cos(βl)|
(8.36)
Per βl = π/2 si ha D → ∞. Con un numero di fori maggiore di 2 si può ottenere una buona
direttività anche tollerando moderate variazioni di frequenza rispetto al valore per cui βl = π/2.
102
8.4.3
Il “T-Magico”
La tipica realizzazione in guida della giunzione ibrida (accoppiamento bilanciato) è basata sulla
connessione tra quattro guide rettangolari con modo TE10 mostrata in fig. 8.15, detta T-Magico.
Le porte 1,2 e 3 sono collocate su tre tratti di guida disposti a forma di T nel piano orizzontale.
La porta 4 è su una guida che si sviluppa in direzione verticale. La guida 1 ha in comune con le 2 e 3
il lato corto, mentre la guida 4 ha in comune con le 2 e 3 il lato lungo. Il principio di funzionamento
della giunzione può essere spiegato con considerazioni qualitative (fig. 8.16).
Supponiamo che il modo TE10 provenga dalla porta 1 (caso a). Le linee di flusso del campo E sono
verticali e simmetriche rispetto al piano di mezzeria della struttura. Pertanto sono compatibili con
la propagazione verso le porte 2 e 3 (in fase tra loro) mentre sono incompatibili con la propagazione
verso la porta 4. Se, invece, il modo TE10 proviene dalla porta 4 (caso b) le linee di flusso del campo
E sono orizzontali e antisimmetriche rispetto al piano di mezzeria della struttura. Pertanto sono
compatibili con la propagazione verso le porte 2 e 3 (in opposizione di fase tra loro) mentre sono
incompatibili con la propagazione verso la porta 1. Si avrà, quindi:
S14 = S41 = 0
S31 = S21
S34 = −S24
(8.37)
Se si introducono elementi tali da far sı̀ che S11 = S44 = 0 e le perdite sono trascurabili, si ottiene la
matrice S di una giunzione ibrida ideale, come mostrato nel par. 7.4.1.
8.4.4
Il “rat-race”
Il “rat-race”, detto anche “hybrid ring”, è una giunzione ibrida che può essere realizzata sia in guida
d’onda che in struttura planare. E’ costituita da un’ anello, di lunghezza complessiva pari a 3λg /2,
su cui si interconnettono 4 strutture guidanti con la geometria mostrata in fig. 8.17 (vista dall’alto).
Ogni porta si collega con ciascuna delle altre 3 attraverso due percorsi (l1 , l2 ).
Le corrispondenti onde che sopraggiungono sull’altra porta possono essere in fase o in controfase,
secondo lo schema mostrato nella tabella 7.1.
Porte
Lunghezza percorso Lunghezza percorso Differenza Differenza
l1 (superiore)
l2 (inferiore)
l2 − l1
di fase
1
1
1
2
2
3
λg /4
λg /2
3λg /4
λg /4
λg /2
λg /4
e
e
e
e
e
e
2
3
4
3
4
4
5 λg /4
λg
3 λg /4
5 λg /4
λg
5 λg /4
Tabella 7.1
Si avrà quindi:
S13 = S31 = S24 = S42 = 0
103
λg
λg /2
0
λg
λg /2
λg
2π
π
0
2π
π
2π
104
Trascurando le perdite lungo i percorsi si ha inoltre:
|S21 | = |S41 | = |S32 | = |S43 |
Se si eliminano le riflessioni su almeno due porte, per quanto dimostrato nel par. 7.4.1 si ottiene una
giunzione ibrida ideale.
8.4.5
L’accoppiatore “coupled line”
L’accoppiatore “coupled line” è realizzato utilizzando un tratto, di lunghezza l, di struttura planare.
In particolare, con riferimento alla fig. 2.13, si utilizza la stripline o la microstriscia nella configurazione coplanare. Il funzionamento dell’accoppiatore è basato sulla possibilità di avere sia il modo
pari che il modo dispari. La fig. 8.18 mostra una vista dall’alto e una vista in sezione della struttura.
La struttura ha sezione bisimmetrica e si interconnette all’esterno su 4 porte collegate con 4 linee di
trasmissione, uguali tra loro, di impedenza caratteristica ZC .
Siano aa e bb i due piani di simmetria. Supponiamo di avere simultaneamente onde incidenti alla
porta 1 e alla porta 2. Se V2+ = V1+ , poichè i cammini dalle due porte fino al piano aa sono uguali
tra loro, sul piano aa stesso le due onde viaggianti in versi opposti saranno ancora in fase tra loro.
Pertanto la sezione aa si comporta come se ciascuna delle due porte vedesse in essa un circuito aperto,
ovvero una parete magnetica (fig. 8.18a). Analogamente, se V2+ = −V1+ , la sezione aa si comporta
come se ciascuna delle due porte vedesse in essa un cortocircuito, ovvero una parete elettrica (fig.
8.18b). Un ragionamento simile può essere svolto sulle porte 3 e 4. Per quanto riguarda la sezione
bb, questa si comporterà come una parete magnetica nel caso di modo pari, come una parete elettrica
nel caso di modo dispari. Nell’ipotesi di avere onde incidenti su tutte e quattro le porte, le possibili
situazioni sono riassunte dalla Tabella 7.2
105
Piano aa
Piano bb
Circuito aperto (H): V2+ = V1+ , V3+ = V4+
Cortocircuito (E): V2+ = −V1+ , V3+ = −V4+
Modo pari (H): V4+ = V1+ , V3+ = V2+
Modo dispari (E): V4+ = −V1+ , V3+ = −V2+
Tabella 7.2
Chiameremo nel seguito βe e βo le costanti di propagazione nei casi di modi pari e dispari
(rispettivamente). Ze e Zo saranno le corrispondenti impedenze caratteristiche.
Consideriamo ora quattro possibili combinazioni di onde incidenti sulle quattro porte. L’impedenza d’ingresso Zin dipenderà dalla combinazione di onde incidenti ma, data la simmetria della
struttura, avrà lo stesso valore sulle quattro porte. Le combinazioni considerate, e i corrispondenti
valori di Zin , sono mostrati nella tabella 7.3 (si è posto d = l/2).
Combinazione
a) V1+ = V2+ = V +
V3+ = V4+ = V +
b) V1+ = V4+ = V +
V2+ = V3+ = −V +
c) V1+ = V2+ = V +
V3+ = V4+ = −V +
d) V1+ = V3+ = V +
V2+ = V4+ = −V +
Piano aa
H
Piano bb
H
Zin
-j Ze cot βe d
E
H
j Ze tan βe d
H
E
-j Zo cot βo d
E
E
j Zo tan βo d
106
Tabella 7.3
Chiamando Γa , Γb , Γc , Γd i coefficienti di riflessione in tensione che si hanno nei quattro casi (a,
b, c, d) della tabella, si ha:
−jZe cot βe d − ZC
−jZe cot βe d + ZC
jZe tan βe d − ZC
=
jZe tan βe d + ZC
−jZo cot βo d − ZC
=
−jZo cot βo d + ZC
jZo tan βo d − ZC
=
jZo tan βo d + ZC
Γa =
Γb
Γc
Γd
(8.38)
Consideriamo ora, per ciascuna delle quattro combinazioni, i rapporti tra le tensioni uscenti su
ciascuna delle quattro porte e il parametro V + definito nella tabella 7.3. Si avranno i valori indicati
in tabella 7.4
Combinazione
a)
b)
c)
d)
V1− /V1+
Γa
Γb
Γc
Γd
V1− /V +
Γa
Γb
Γc
Γd
V2− /V +
Γa
-Γb
Γc
-Γd
V3− /V +
Γa
-Γb
-Γc
Γd
V4− /V +
Γa
Γb
-Γc
-Γd
Tabella 7.4
Supponiamo ora di inviare all’accoppiatore una combinazione di onde di tensione incidenti che
sia la somma delle quattro precedentemente considerate. Indicando tale situazione col pedice s si
avrà:
V1s+ = 4V +
V2s+ = V3s+ = V4s+ = 0
(8.39)
Per le 8.39 gli elementi della prima colonna della matrice S saranno dati da:
Si1 = Vis− /V1s+
(8.40)
Si ha quindi:
S11
S21
S31
S41
=
=
=
=
V1s− /V1s+
V2s− /V1s+
V3s− /V1s+
V4s− /V1s+
= (Γa + Γb + Γc + Γd )/4
= (Γa − Γb + Γc − Γd )/4
= (Γa − Γb − Γc + Γd )/4
= (Γa + Γb − Γc − Γd )/4
(8.41)
Definiamo ora, per brevità:
te = tan βe d
to = tan βo d
107
(8.42)
Dalle 8.38 si ha:
2(ZC2 te − Ze Zo to )
jZC (Ze − Zo te to ) − ZC2 te − Ze Zo to
2(ZC2 to − Ze Zo te )
=
jZC (Zo − Ze te to ) − ZC2 to − Ze Zo te
Γa + Γd =
Γb + Γc
(8.43)
Supponiamo ora di realizzare l’accoppiatore in modo da avere:
βe = βo = β
(8.44)
Ze Zo = ZC2
(8.45)
Γa + Γd = Γb + Γc = 0
(8.46)
(da cui te = to ) e, inoltre:
Dalle 8.43, 8.44 e 8.45 si avrà:
Quindi, per le 8.41:
S11 = S31 = 0,
che è la condizione richiesta negli accoppiatori. Inoltre, si ha:
Γa + Γb = −Γc − Γd
(8.47)
Quindi:
1
S41 = (Γa + Γb )
2
Supponiamo ancora di scegliere l in modo tale che:
βl =
π
2
(8.48)
(8.49)
Si avrà, allora :
π
4
= to = 1
Ze − Zo
=
Ze + Zo
βd =
te
S41
(8.50)
Un andamento tipico di |S41 | in funzione di βl è mostrato in fig. 8.19.
Il valore massimo che può assumere |S41 | dipende dalla differenza massima tra Ze e Ze ottenibile.
In generale, si possono raggiungere valori più alti con la stripline che con la microstriscia. Si avrà,
poi:
q
|S21 | = 1 − |S41 |2
(8.51)
Scegliendo:
√
Ze
2+ 2
√
=
Zo
2− 2
si ha:
(8.52)
√
2
2
Se è soddisfatta la 8.53 si è realizzata una giunzione ibrida (bilanciamento).
|S21 | = |S41 | =
108
(8.53)
8.4.6
L’accoppiatore “branch line”
Un’altra realizzazione di accoppiatore in struttura planare è il cosiddetto “branch line”. La vista
dall’alto è mostrata in fig. 8.20. Parallelamente al piano del foglio, saranno anche presenti piani
metallici in numero di uno (nel caso della microstriscia) o due (nel caso della stripline). Il branch-line
ha una struttura rettangolare.
Sono presenti:
• due lati orizzontali di lunghezza l1 = 2d1 , ammettenza caratteristica Y1 , costante di propagazione
β1 ;
• due lati verticali di lunghezza l2 = 2d2 , ammettenza caratteristica Y2 , costante di propagazione
β2 .
A differenza del caso “coupled line”, i quattro lati producono effetti indipendenti tra loro, senza
accoppiamenti reciproci. In corrispondenza dei vertici del rettangolo, c’è interconnessione con 4
linee di trasmissione uguali tra loro, di ammettenza caratteristica YC . I piani di simmetria aa
e bb si comporteranno come circuiti aperti (pareti magnetiche) o cortocircuiti (pareti elettriche) a
seconda della fase relativa delle onde che incidono sulle due porte agli estremi del lato corrispondente.
Analogamente al caso “coupled line”, considereremo quattro combinazioni di onde incidenti sulle
quattro porte, come indicato nella tabella 7.5.
109
Combinazione
a) V1+ = V2+ = V +
V3+ = V4+ = V +
b) V1+ = V4+ = V +
V2+ = V3+ = −V +
c) V1+ = V2+ = V +
V3+ = V4+ = −V +
d) V1+ = V3+ = V +
V2+ = V4+ = −V +
Piano aa
H
Piano bb
H
E
H
H
E
E
E
Tabella 7.5
Per ciascuna delle quattro combinazioni, ogni porta è come se vedesse il parallelo di due linee di
trasmissione costituite da due semilati (di lunghezza d1 e d2 ) del rettangolo chiusi in circuito aperto
o in cortocircuito a seconda che il piano di simmetria che taglia il lato sia una parete magnetica
o elettrica. Ad esempio, per i quattro casi di Tabella 8.5, la porta 1 vede le quattro situazioni
schematizzate in figura 8.21.
Chiamando:
t1 = tan β1 d1
t2 = tan β2 d2
si avranno, per le quattro precedenti situazioni, i seguenti coefficienti di riflessione.
YC − jY1 t1 − jY2 t2
YC + jY1 t1 + jY2 t2
YC + jY1 /t1 − jY2 t2
=
YC − jY1 /t1 + jY2 t2
Γa =
Γb
110
(8.54)
YC − jY1 t1 + jY2 /t2
YC + jY1 t1 − jY2 /t2
YC + jY1 /t1 + jY2 /t2
=
YC − jY1 /t1 − jY2 /t2
Γc =
Γd
(8.55)
Si procede poi analogamente al caso del par. 7.4.5. Si considera una combinazione di ingressi data
dalla somma delle quattro combinazioni precedentemente considerate. Per gli elementi della matrice
S saranno ancora valide le 8.41, con Γa , Γb , Γc , Γd dati, in questo caso, dalle 8.55. Supponiamo, poi,
di scegliere:
π
β1 d1 = β2 d2 =
(8.56)
4
Y12 − Y22 = YC2
(8.57)
Si avrà, di conseguenza:
t1 = t2 = 1
(8.58)
Γa + Γc = −(Γb + Γd )
Γa − Γc = Γd − Γb
(8.59)
e, inoltre:
S11 = 0
S41 = 0
1
S31 =
(Γa − Γc ) = −Y2 /Y1
2
1
S21 =
(Γa + Γc ) = −jYC /Y1
2
111
(8.60)
Si può quindi ottenere una buona direttività e il fattore di accoppiamento desiderato scegliendo
opportunamente Y1 e Y2 . Se si vuole realizzare una giunzione ibrida, bisognerà scegliere:
Y2 = YC
√
Y1 =
2YC
Si avrà infatti, di conseguenza:
√
2
2
|S31 | = |S21 | =
8.5
(8.61)
(8.62)
Richiami sulle ferriti
8.5.1
Premessa
Nei paragrafi precedenti sono stati descritti componenti reciproci. Nei successivi, si considereranno
componenti ai quali, per applicazioni varie, sono richiesti comportamenti non reciproci. Come si
vedrà, infatti, sono caratterizzati da:
Zij 6= Zji
Ŝij 6= Ŝji
(8.63)
Perchè una giunzione possa avere comportamento non-reciproco è necessario che al suo interno
sia presente materiale di proprietà tali da far cadere il teorema di reciprocità. A tal fine si usa la
ferrite, un materiale per il quale le relazioni costitutive dell’elettromagnetismo assumono la seguente
forma:
D = E
B = µ·H
(8.64)
Nelle 8.64 la costante dielettrica è scalare, ma la permeabilità magnetica è tensoriale. Prima di
descrivere i componenti non-reciproci, nel presente paragrafo sono richiamate le proprietà fisiche
fondamentali di materiali ferritici. Le ferriti contengono metalli legati con F e2 O3 . Hanno basse
conducibilità (tipicamente 10−14 volte minori di quelle dei metalli) ed r ' 10 − 15. La loro proprietà
fondamentale è descritta dalla seconda delle 8.64. Per richiamare i concetti fondamentali, partiamo
dallo schema astratto di un singolo elettrone nello spazio libero. L’elettrone è caratterizzato dalle
seguenti costanti proprie:
• Carica e (C)
• Massa w (Kg)
• Momento angolare P (Joule · s)
1
|P| =
2
h
2π
!
= Iω
(8.65)
(h è la costante di Plank, I è il momento di inerzia, ω la velocità angolare)
• Momento magnetico m (A · m2 )
|m| =
112
eh
4πw
(8.66)
Sussiste la relazione:
m = −γP
(8.67)
γ è detto rapporto giromagnetico. Si ha:
γ=
e
|m|
=
|P|
w
(8.68)
L’ elettrone ha una rotazione propria (moto di spin) cui è associato il momento angolare P. Supponiamo ora di applicare un campo magnetico statico Hs con orientazione diversa da quella di P
(fig. 8.22).
Si genera una coppia: .
T = m × µ◦ Hs = −γP × µ◦ Hs
(8.69)
La coppia produce una variazione di momento angolare:
dP
= ω◦ × P
dt
L’effetto è un moto di precessione intorno all’asse z con velocità angolare:
T=
ω◦ = γµ◦ Hs
(8.70)
(8.71)
Va notato che ω◦ è indipendente dall’angolo φ formato dalla direzione di Hs e quella di P. Il momento
magnetico m varierà secondo la:
dm
dP
= −γ
= −γ(ω◦ × P) = −γ(m × µ◦ Hs )
(8.72)
dt
dt
Il materiale ferritico può essere visto come un insieme di dipoli magnetici. Dal punto di vista
macroscopico, può essere trattato come una distribuzione continua, caratterizzata da un momento
di dipolo per unità di volume pari a:
M = Nm
(8.73)
113
m è il momento del singolo dipolo ed N è il numero di dipoli per unità di volume. Se applichiamo
a questo materiale un campo magnetico statico, ci sarà una fase transitoria in cui i dipoli magnetici
subiranno il moto di precessione. Per effetto delle perdite dovute a interazioni reciproche la precessione sarà smorzata cosicchè, esaurito il transitorio, i dipoli si orienteranno parallelamente al campo
statico. All’aumentare dell’ampiezza del campo ci sarà un aumento di |M| , finchè si raggiungerà la
saturazione quando tutti i dipoli saranno orientati parallelamente al campo. La corrispondenza tra
|M| ed |Hs | sarà espressa da un diagramma del tipo di quello in fig. 8.23. Il valore di saturazione è
indicato con Ms . Il vettore Ms è parallelo ad Hs .
Nel seguito, si supporrà sempre che la ferrite è in condizioni di saturazione.
8.5.2
Onde elettromagnetiche nella ferrite
Quanto richiamato nel paragrafo 7.5.1 appartiene alla magnetostatica. Supponiamo ora che un’onda
piana, caratterizzata dai campi variabili nel tempo E(t) e H(t), si propaghi in uno spazio illimitato
riempito di ferrite in saturazione, e che la direzione di propagazione sia parallela a quella del campo
statico Hs (fig. 8.24).
Il momento del dipolo per unità di volume sarà dato dalla combinazione di una componente
statica Ms ed una componente variabile nel tempo M(t). Si avrà, analogamente al caso del singolo
elettrone:
d(Ms + M)
= −γ[(Ms + M) × (Hs + H)µ◦ ]
(8.74)
dt
Essendo :
dMs
=0
dt
Ms × Hs = 0
M Ms
H Hs
114
(8.75)
si avrà:
dM
= −γµ◦ (Ms × H + M × Hs )
dt
In regime armonico, chiamando M ed H i fasori associati a M ed H , si ha:
(8.76)
jωM = −γµ◦ (Ms × H + M × Hs )
(8.77)
jωM + γµ◦ (M × Hs ) = −γµ◦ (Ms × H)
(8.78)
La 8.78 può essere espressa in forma tensoriale:
M=χ·H
(8.79)
Ovvero, in esteso:
Mx
χxx χxy 0
Hx
My = χyx χyy 0 Hy
0
0 0
Mz
Hz
(8.80)
χ è il tensore suscettività. Tenendo conto che: ω◦ = γµ◦ Hs (pulsazione di risonanza)
gli elementi del tensore di suscettività saranno dati da:
χxx = χyy =
χxy = −χyx
ω◦ γµ◦ Ms
=χ
ω◦2 − ω 2
jωγµ◦ Ms
= 2
= jK
ω◦ − ω 2
(8.81)
Anche l’induzione magnetica sarà legata al campo da una relazione tensoriale:
B = µ◦ (H + M) = µ · H
115
(8.82)
In esteso:
Bx
1 + χ jK 0
Hx
By = µ◦ −jK 1 + χ 0 Hy
Bz
0
0
1
Hz
(8.83)
Per semplicità, la trattazione fin qui svolta si è basata sull’ipotesi di assenza di perdita. In realtà,
nella 8.74 bisogna introdurre anche un termine L che rappresenta gli effetti di smorzamento, dato
da:
dM
α
Ms ×
(8.84)
L=
Ms
dt
Qualora se ne tenga conto, si perverrà sempre ad una espressione del tipo della 8.80, ma i fattori χ
e K avranno espressioni meno semplici e saranno quantità complesse.
Vediamo ora le conseguenze di quanto precedentemente esposto sulla propagazione. In una prima
trattazione semplificata, descritta in fig. 8.24, si ha:
E = E◦ exp(−jβz)
H = H◦ exp(−jβz)
(8.85)
Le equazioni di Maxwell, tenendo conto della 8.82 assumono la seguente forma:
∇ × E = −jωµ · H
∇ × H = jωE
(8.86)
D’altra parte si ha, per la prima delle 8.85:
∇ × E = −E◦ × ∇[exp(−jβz)] = jβE◦ × z◦ exp(−jβz)
(8.87)
Combinando la 8.87 con la seconda delle 8.85 e la prima delle 8.86:
jβE◦ × z◦ = −jωµ · H◦
(8.88)
Analogamente, sviluppando il ∇ × H , si dimostra che:
jβH◦ × z◦ = jωE◦
(8.89)
Eliminando E◦ per sostituzione, dalle 8.88 e 8.89 si ottiene:
jβ
jβ
(H◦ × z◦ ) × z◦ = −jωµ · H◦
jω
(8.90)
Ovvero:
β 2 H◦ = ω 2 µ · H◦
(8.91)
In forma matriciale, tenendo conto della 8.83:
"
β 2 − ω 2 µ◦ (1 + χ)
−jω 2 µ◦ K
jω 2 µ◦ K
β 2 − ω 2 µ◦ (1 + χ)
#"
H◦x
H◦y
#
=0
(8.92)
dove χ e K, nell’ipotesi semplificata di assenza di perdite, sono dati dalle 8.81. Perchè il sistema
8.92 abbia soluzioni non banali, deve annullarsi il determinante. Quindi:
h
i2
β 2 − ω 2 µ◦ (1 + χ)
116
− ω 4 2 µ2◦ K 2 = 0
(8.93)
da cui:
β 2 = ω 2 µ◦ (1 + χ) ± ω 2 µ◦ K
(8.94)
Le soluzioni (modi naturali di propagazione) sono:
β+2 = ω 2 µ◦ (1 + χ + K)
β−2 = ω 2 µ◦ (1 + χ − K)
(8.95)
[β 2 − ω 2 µ◦ (1 + χ)]H◦x − jω 2 µ◦ KH◦y = 0
(8.96)
Dalle 8.92 si ha, poi:
Per β 2 = β+2 : H◦x = jH◦y
Per β 2 = β−2 : H◦x = −jH◦y
Pertanto i valori di β soluzioni della 8.94 coincidono con le costanti di propagazione che il mezzo
presenta per onde TEM con polarizzazione circolare, destra e sinistra. Tali soluzioni corrispondono
ai modi naturali di propagazione. Anche questa trattazione è stata svolta nell’ipotesi semplificativa
di assenza di perdite. Qualora si tenesse conto delle perdite, occorrerebbe partire dalle:
E = E◦ exp(−γz)
H = H◦ exp(−γz)
(8.97)
con γ = α + jβ La trattazione è simile a quella precedentemente esposta, purchè si utilizzino le
espressioni complete di χ e K al posto delle 8.81. Si ottiene, anche in questo caso, una coppia di
soluzioni:
γ+ = α+ + jβ+
γ− = α− + jβ−
(8.98)
Andamenti tipici dei parametri β+ , β− , α+ , α− in funzione del rapporto ω◦ /ω sono mostrati in fig.
8.25. In conseguenza della non reciprocità del mezzo, si ha β+ 6= β− e α+ 6= α− . La differenza tra
α+ e α− è particolarmente forte in corrispondenza della risonanza, cioè per ω = ω◦ .
8.5.3
L’effetto Faraday
Si abbia un’onda che si propaga in un mezzo illimitato magnetizzato in saturazione e supposto, per
semplicità, privo di perdite (fig. 8.26).
Supponiamo che la direzione di propagazione coincida con quella di magnetizzazione e che il
campo elettrico, per z = 0, sia polarizzato linearmente, per esempio lungo l’asse x. Un campo
polarizzato linearmente può essere decomposto in due componenti polarizzate circolarmente aventi
uguale ampiezza e versi opposti. Si ha quindi:
E(0) = E◦ x◦ =
E◦
[(x◦ + jy◦ ) + (x◦ − jy◦ )]
2
(8.99)
Nella propagazione lungo l’asse z le costanti di propagazione delle due componenti saranno diverse
tra loro. Per z = l si avrà:
E(l) =
E◦
[(x◦ + jy◦ ) exp(−jβ− l) + (x◦ − jy◦ ) exp(−jβ+ l)]
2
117
(8.100)
118
Raggruppando opportunamente:
E◦
{x◦ [exp(−jβ− l) + exp(−jβ+ l)] + jy◦ [exp(−jβ− l) − exp(−jβ+ l)]}
2
1
0
0
=
exp[−j(β− + β+ )l/2](x◦ E◦x + y◦ )E◦y )
2
E(l) =
(8.101)
Laddove:
0
E◦x = E◦ {exp[−j(β− − β+ )l/2] + exp[j(β− − β+ )l/2]}
0
E◦y = jE◦ {exp[−j(β− − β+ )l/2] − exp[j(β− − β+ )l/2]}
(8.102)
Tenendo conto delle formule di Eulero si ha:
E(l) = E◦ exp[−j(β− + β+ )l/2]{x◦ cos[(β− − β+ )l/2] − y◦ sin[(β− − β+ )l/2]}
(8.103)
Pertanto il campo, a distanza l, avrà le seguenti caratteristiche:
• sarà ancora polarizzato linearmente;
• il piano di polarizzazione sarà ruotato rispetto all’asse x di un angolo θ dato da:
θ = (β− − β+ )l/2
(8.104)
• rispetto a z = 0, si avrà un ritardo di fase ∆φ pari a:
∆φ = (β− + β+ )l/2
(8.105)
La trattazione è stata svolta nell’ipotesi di propagazione nel verso delle z positive. Proprietà
importante è la seguente: il verso di rotazione del piano di polarizzazione è indipendente dal verso di
propagazione. Per propagazione nel verso delle z negative si ha lo stesso angolo θ della 8.104, anche
in segno. Il verso di rotazione del piano di polarizzazione si inverte solo invertendo il verso di Hs .
La trattazione è stata sviluppata nell’ipotesi di propagazione in un mezzo illimitato. Supponiamo,
ora, di avere una guida d’onda circolare in cui si propaga il modo fondamentale TE11 . Supponiamo,
che all’interno della guida sia presente una barretta di ferrite magnetizzata in saturazione (fig. 8.27).
La configurazione delle linee di flusso del campo elettrico, prima di attraversare la ferrite, è quella
mostrata nel capitolo sulla guida d’onda circolare. Può essere decomposta in due componenti rotanti
in senso inverso. Con una trattazione analoga a quella svolta nello spazio libero, si può dimostrare che
le due componenti si propagano con diverse costanti di propagazione. Dopo l’attraversamento della
barretta, le linee di flusso del campo elettrico avranno la stessa forma che avevano all’ingresso (che
è propria del modo TE11 ) ma con il piano di simmetria ruotato di un angolo θ . Il verso di rotazione
non dipende dal verso di propagazione, ma da quello di magnetizzazione. Pertanto, l’effetto Faraday
si verifica anche in guida circolare, conservando le proprietà già dimostrate per lo spazio illimitato.
La rotazione del piano di polarizzazione potrebbe essere ottenuta anche con una guida rettangolare
che subisce una torsione (twist): ciò vuol dire che la sezione della guida ruota intorno al centro di
un angolo che aumenta con la coordinata longitudinale. A differenza dell’effetto Faraday, l’effetto
del twist è reciproco: il verso di rotazione dipende dal verso di propagazione. Alcuni componenti,
che saranno descritti nei successivi paragrafi, si basano proprio sulla combinazione tra la rotazione
dovuta a effetto Faraday e quella dovuta a un twist.
119
8.6
Giratori
Il giratore è un componente due porte avente l’obiettivo di generare una differenza pari a π tra lo
sfasamento per attraversamento in un verso e lo sfasamento per attraversamento nel verso opposto.
Il componente deve essere realizzato in modo da non avere riflessioni sulle due porte. Nel caso ideale,
la matrice S sarà:
0
exp(−j∆φ)
[S] =
(8.106)
exp(−j∆φ + π)
0
Una possibile realizzazione è mostrata in fig. 8.28.
Il componente è realizzato dalle seguenti parti.
• Porta 1 su guida rettangolare;
• Twist con rotazione di π/2:
– in senso antiorario se l’onda si propaga dalla porta 1 alla porta 2;
– in senso orario se l’onda si propaga dalla porta 2 alla porta 1;
• Transizione da guida rettangolare a guida circolare;
• Tratto di guida circolare con barretta di ferrite magnetizzata in saturazione, tale da provocare
una rotazione di π/2 in senso antiorario qualunque sia il verso di propagazione dell’onda;
• Transizione da guida circolare a guida rettangolare;
• Porta 2 in guida rettangolare.
120
121
I versi di rotazione sono stati definiti guardando dalla porta 1 verso la porta 2. Sia in guida rettangolare che in guida circolare si propaga il solo modo fondamentale. Individuando le sezioni A,B e
C come in fig. 8.27, la situazione delle polarizzazioni del campo elettrico sarà quella mostrata nella
tabella 7.6.
Sezione Propagazione 1 → 2 Propagazione 2 → 1
A
↑
↑
B
←
←
↓
↑
C
Tabella 7.6
Come si nota, nel cammino 1-2 c’è uno sfasamento di π che va ad aggiungersi allo sfasamento ∆φ
dovuto alla propagazione, mentre nel cammino 2-1 c’è solo lo sfasamento ∆φ. Si avrà, quindi:
S21 = S12 exp(jπ)
8.7
(8.107)
Isolatori
L’isolatore è un componente a due porte trasparente per la propagazione in un verso ma fortemente
attenuante per la propagazione nel verso opposto. Nel caso ideale, la matrice S sarà:
[S] =
0 0
8.7.1
1 0
(8.108)
Isolatore a effetto Faraday
Una possibile realizzazione di isolatore è mostrata in fig. 8.29.
Il componente è costituito dalle seguenti parti:
• Porta 1 in guida rettangolare;
• Prima lamina dielettrica dissipativa orizzontale;
• Twist con rotazione di π/4:
– in senso antiorario se l’onda si propaga dalla porta 1 alla porta 2;
– in senso orario se l’onda si propaga dalla porta 2 alla porta 1;
• Transizione da guida rettangolare a guida circolare;
• Tratto di guida circolare con barretta di ferrite magnetizzata in saturazione, tale da produrre
una rotazione di π/4 in senso orario qualunque sia il verso di propagazione;
• Transizione da guida circolare a guida rettangolare;
122
• Seconda lamina dielettrica dissipativa orizzontale;
• Porta 2 in guida rettangolare.
I versi di rotazione sono stati definiti guardando dalla porta 1 verso la porta 2. Analogamente al caso
del par. 7.6, nella guida si propaga il solo modo fondamentale. Individuando le sezioni A,B,C,D,E
come in fig. 8.28, la situazione della polarizzazione del campo elettrico sarà quella indicata nella
tabella 7.7.
Sezione Propagazione 1 → 2 Propagazione 2 → 1
A
↑
·
B
↑
→
C
%
D
↑
↑
E
↑
↑
Tabella 7.7
Per la propagazione dalla porta 1 alla porta 2 il campo si presenterà alla sezione D polarizzato
verticalmente, per cui passerà attraverso la lamina ed entrerà nella porta 2. Per la propagazione
inversa, nella sezione B inciderà un campo polarizzato orizzontalmente che non potrà propagarsi
verso la porta 1 e sarà comunque attenuato dalla lamina. Si realizzerà cosı̀ la matrice S di 8.108. La
123
presenza di lamine orizzontali su ambedue le porte ha la funzione di estinguere eventuali riflessioni
multiple.
8.7.2
Isolatore a risonanza
L’isolatore a risonanza è realizzato introducendo in una guida rettangolare, in cui si propaga il modo
fondamentale TE10 , un elemento di ferrite magnetizzato in saturazione nella direzione del lato corto
della guida (fig. 8.30). I parametri dell’elemento di ferrite sono dimensionati in modo da trovarsi in
prossimità della frequenza di risonanza.
Per comprendere il funzionamento di questo componente occorre richiamare le proprietà del modo
TE10 in guida d’ onda rettangolare. Supponendo, inizialmente, che la guida sia internamente vuota,
dalle espressioni dei campi si ha che Hz = Hx nei punti in cui:
cos
β10
πx
πx
=±
sin
a
kc10
a
(8.109)
πx
π
=±
a
β10 a
(8.110)
a
π
arctan
= x1
π
β10 a
(8.111)
Cioè:
tan
Scegliendo la soluzione col segno + si ha:
x=
Per x = x1 si ha la seguente situazione.
• Per propagazione nel verso delle z positive: Hz = jHx
• Per propagazione nel verso delle z negative: Hz = −jHx
124
Pertanto, per x = x1 , il campo magnetico è polarizzato circolarmente nel piano xz e il verso di
rotazione dipende dal verso di propagazione. D’altra parte la fig. 8.24 mostrava che, per un’onda
piana che si propaga in uno spazio illimitato riempito di ferrite con ω ' ω◦ , l’attenuazione (α+
o α− ) è fortemente dipendente dal verso della polarizzazione circolare. Si può dimostrare che
questa proprietà vale anche in guida e anche se la direzione di propagazione è ortogonale a quella
di magnetizzazione (come nel caso di fig. 8.29). La direzione di magnetizzazione, a sua volta, è
ortogonale al piano formato dalle componenti Hz e Hx . Ne consegue che, data la corrispondenza
tra verso di propagazione e verso di polarizzazione circolare stabilita in precedenza, se si colloca la
barra di ferrite ad una distanza dal lato corto pari proprio a x1 , si avrà un effetto attenuante che è
forte per la propagazione in un verso, debole per la propagazione nel verso opposto. Si ottiene cosı̀
il comportamento dell’isolatore.
8.7.3
Isolatore a effetto di campo
L’isolatore a effetto di campo, analogamente al precedente, è realizzato in guida rettangolare. In
questo caso, all’interno della guida, sono collocate una barretta di ferrite, magnetizzata in saturazione
nella direzione parallela al lato corto, e una lastra dielettrica dissipativa (fig. 8.31).
La ferrite, a differenza del caso precedente, non è prossima alla risonanza. Il funzionamento
del componente, alquanto complesso, sarà spiegato qualitativamente. La fig. 8.31b mostra la distribuzione di campo elettrico che si avrebbe in assenza della ferrite e della lastra dielettrica: si ha
il semplice andamento sinusoidale proprio del modo TE10 in guida rettangolare. La ferrite perturba
il campo elettrico in una forma non reciproca. Per propagazione nel verso delle z positive si ha la
distribuzione mostrata in fig. 8.31c, mentre per propagazione nel verso opposto si ha quella mostrata
in fig. 8.31d. Nel primo caso, in corrispondenza a x = x1 , il campo elettrico assumerà un valore
basso, mentre nel secondo caso assumerà un valore elevato. Poichè la lastra dissipativa viene collocata proprio per x = x1 , nel primo caso si avrà una debole interazione col campo elettrico, con
conseguente debole attenuazione, mentre nel secondo caso l’interazione e l’attenuazione saranno forti.
125
8.8
Circolatori a 3 porte
Il circolatore a 3 porte ha come obiettivo la sinterizzazione della seguente matrice S:
0 0 1
[S] = 1 0 0
0 1 0
(8.112)
È un componente di importanza fondamentale nei circuiti a microonde. Infatti, nei sistemi ricetrasmittenti, è necessario avere i percorsi mostrati in fig. 8.32.
Deve esserci flusso di potenza nelle direzioni dal trasmettitore (T) all’antenna e dall’antenna
al ricevitore (R), mentre il cammino diretto trasmettitore-ricevitore deve essere fortemente isolato
e anche le riflessioni sulle porte devono essere ridotte al minimo. Quella che è richiesta, quindi, è
proprio una giunzione con matrice S quanto possibile prossima alla 8.112. Esiste il seguente teorema.
Una giunzione 3 porte priva di perdite e di riflessioni sulle 3 porte:
• non può essere reciproca;
• deve essere proprio un circolatore ideale.
Per dimostrarlo, partiamo dalla generica matrice S di una giunzione 3 porte priva di riflessioni:
0
S12 S13
[S] =
S21
0
S31 S32
S23
0
(8.113)
Se la giunzione è priva di perdite devono valere, anche in assenza di reciprocità, le:
N
X
i
|Ŝik |2 =
N
X
i
126
∗
Ŝik Ŝik
=1
(8.114)
N
X
∗
(Ŝis Ŝir
)=0
(8.115)
i
Supponiamo che le tre linee che afferiscono alla giunzione siano uguali tra loro. Si avrà:
∗
∗
S21 S21
+ S31 S31
=1
∗
∗
S12 S12 + S32 S32 = 1
∗
∗
S13 S13
+ S23 S23
=1
∗
S31 S32 = 0
∗
S21 S23
=0
∗
S12 S13 = 0
(8.116)
(8.117)
(8.118)
(8.119)
(8.120)
(8.121)
Supponiamo che S21 6= 0;
Per la 8.120: S23 = 0
Per la 8.118: |S13 | = 1
Per la 8.121: S12 = 0
Per la 8.117: |S32 | = 1
Per la 8.119: S31 = 0
Per la 8.116: |S21 | = 1
Si ottiene cos la matrice 8.112, almeno per le ampiezze. Le fasi possono essere poste uguali a zero
scegliendo opportunamente le posizioni delle porte lungo le linee afferenti la giunzione. Il circolatore
a 3 porte può essere realizzato sia in guida che in struttura planare. In ambedue i casi presenterà un
nucleo centrale costituito da un cilindro ferritico magnetizzato in saturazione parallelamente all’asse.
La fig. 8.33 mostra uno schema di vista dall’alto.
Le tre linee afferiscono radialmente, formando un angolo a 120◦ l’una rispetto all’altra. Nella
pratica saranno presenti sia perdite che riflessioni, per cui la matrice S sarà diversa dal caso ideale
8.112. In una buona realizzazione, le ampiezze |S21 |, |S13 | e |S32 | sono dell’ordine di 0.9.
127
Bibliografia
[1] D.Solimini, “Appunti dalle lezioni di Campi Elettromagnetici” , Texmat , 2000.
[2] G.Martinelli, M.Salerno, “Fondamenti di Elettrotecnica”, Volume II, Ediz. Scientifiche Siderea,
1996.
[3] R.E.Collin, “Foundations for Microwave Engineering”, Mc Graw-Hill, Second Edition, 1992.
[4] D.M.Pozar, “Microwave Engineering”, John Wiley and Sons, Second Edition, 1998.
128