Dispense di Analisi II
Pietro Zecca
16 gennaio 2003
ii
Indice
1 Integrali Impropri
1.1 Idee Base ed Esempi . . . . . . . . . .
1.1.1 Un’altra Improprietà . . . . . .
1.1.2 La Definizione Formale . . . . .
1.1.3 Esercizi . . . . . . . . . . . . .
1.2 Convergenza . . . . . . . . . . . . . . .
1.2.1 Esempi Importanti . . . . . . .
1.2.2 Confronto di Integrali Impropri:
1.2.3 Convergenza Assoluta . . . . .
1.2.4 Esercizi . . . . . . . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
Due Teoremi
. . . . . . . .
. . . . . . . .
2 Serie Numeriche
2.1 Limiti di Successioni . . . . . . . . . . . . . . . . .
2.1.1 Esercizi . . . . . . . . . . . . . . . . . . . .
2.2 Serie: Convergenza e Divergenza. . . . . . . . . . .
2.2.1 Convergenza: Definizioni e Terminologia . .
2.2.2 Serie Geometriche e Serie Telescopiche . . .
2.2.3 Proprietà Algebriche delle Serie Convergenti
2.2.4 Convergenza o Meno delle Serie . . . . . . .
2.2.5 Esercizi . . . . . . . . . . . . . . . . . . . .
2.3 Criteri di Convergenza e Stima . . . . . . . . . . .
2.3.1 Esercizi . . . . . . . . . . . . . . . . . . . .
2.4 Serie a Segni Alterni . . . . . . . . . . . . . . . . .
2.4.1 Convergenza e Convergenza Assoluta . . . .
2.4.2 Convergenza e Stima dell’Errore . . . . . . .
2.4.3 Esercizi . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
2
4
5
8
11
11
13
16
19
.
.
.
.
.
.
.
.
.
.
.
.
.
.
25
30
35
37
37
40
43
44
46
49
57
60
61
64
67
3 Serie di Potenze
69
3.1 Serie di Potenze come Funzioni . . . . . . . . . . . . . . . . . 71
3.1.1 Cosa Dicono gli Esempi . . . . . . . . . . . . . . . . . 75
3.1.2 Convergenza delle Serie di Potenze . . . . . . . . . . . 76
iii
INDICE
iv
3.1.3 Esercizi . . . . . . . . . . . . . . . . . . . .
3.1.4 Serie di Potenze: Integrazione e Derivazione
3.1.5 Algebra e Calcolo delle Serie . . . . . . . . .
3.1.6 Un Atlante Sintetico . . . . . . . . . . . . .
3.1.7 Esercizi . . . . . . . . . . . . . . . . . . . .
3.2 Serie di Taylor e Mac Laurin . . . . . . . . . . . . .
3.2.1 Esercizi. . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
79
83
86
90
92
95
101
4 Funzioni di Più Variabili
4.1 Coordinate Cartesiane in Tre Dimensioni. . . . . . . .
4.2 Equazioni e Loro Grafici . . . . . . . . . . . . . . . .
4.2.1 Equazioni Lineari. . . . . . . . . . . . . . . .
4.2.2 Sfera . . . . . . . . . . . . . . . . . . . . . . .
4.2.3 Cilindro . . . . . . . . . . . . . . . . . . . . .
4.2.4 Orientazione . . . . . . . . . . . . . . . . . . .
4.2.5 Esercizi . . . . . . . . . . . . . . . . . . . . .
4.3 Funzioni di Più Variabili . . . . . . . . . . . . . . . .
4.3.1 Perché Studiare Funzioni di Più Variabili. . .
4.3.2 Grafici . . . . . . . . . . . . . . . . . . . . . .
4.3.3 Attenzione ai Grafici ... . . . . . . . . . . . . .
4.3.4 Esercizi . . . . . . . . . . . . . . . . . . . . .
4.4 Derivate Parziali . . . . . . . . . . . . . . . . . . . .
4.4.1 Derivate in Più Variabili. . . . . . . . . . . . .
4.4.2 Derivate Parziali e Mappe di Contorno. . . . .
4.4.3 Derivate Parziali ed Approssimazioni Lineari.
4.4.4 Esercizi . . . . . . . . . . . . . . . . . . . . .
4.5 Ottimizzazione . . . . . . . . . . . . . . . . . . . . .
4.5.1 Esercizi . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
105
105
106
107
108
109
111
113
115
115
116
117
119
121
121
124
125
129
131
136
5 Integrali Multipli
5.1 Integrali Doppi. . . . . . . . . . . . . . . . . . . .
5.1.1 L’integrale come Limite . . . . . . . . . .
5.1.2 Esercizi. . . . . . . . . . . . . . . . . . . .
5.1.3 Calcolo degli Integrali per Iterazione. . . .
5.1.4 Integrali su Regioni Non-Rettangolari . . .
5.1.5 Esercizi . . . . . . . . . . . . . . . . . . .
5.1.6 Integrali Doppi in Coordinate Polari . . .
5.1.7 ”Rettangoli” Polari. . . . . . . . . . . . .
5.1.8 Esercizi. . . . . . . . . . . . . . . . . . . .
5.2 Integrali Tripli. Coordinate Cilindriche e Sferiche.
5.2.1 Coordinate Cilindriche. . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
139
141
143
147
148
152
155
157
158
164
165
168
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
INDICE
v
5.2.2
5.2.3
Coordinate Sferiche . . . . . . . . . . . . . . . . . . . . 169
Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . 171
6 Curve nel piano
6.1 Curve Piane ed Equazioni Parametriche. . . . . . . . . . . .
6.1.1 Equazioni Parametriche. . . . . . . . . . . . . . . . .
6.2 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Funzioni a Valori Vettoriali . . . . . . . . . . . . . . . . . . .
6.3.1 Derivate delle Funzioni a Valori Vettoriali, Vettori Tangenti. . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.2 Rotazione . . . . . . . . . . . . . . . . . . . . . . . .
6.3.3 Il Vettore Velocità e la Lunghezza di una Curva. . . .
6.4 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5 Moti Bidimensionali . . . . . . . . . . . . . . . . . . . . . .
6.5.1 Integrali di una Funzione a Valori Vettoriali . . . . .
6.5.2 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . .
6.5.3 Moti Lineari, Circolari e Combinati. . . . . . . . . . .
6.5.4 Principio di Sovrapposizione degli Effetti . . . . . . .
6.6 Esercizi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6.1 Curvatura . . . . . . . . . . . . . . . . . . . . . . . .
6.7 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
7 Derivate
7.0.1 Punti Stazionari, Massimi e Minimi . . . . . . . . .
7.0.2 Esercizi . . . . . . . . . . . . . . . . . . . . . . . .
7.1 Il Gradiente . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1.1 Gradiente ed Approssimazione Lineare . . . . . . .
7.1.2 Esercizi . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Linearità Locale: Teoria della Derivazione . . . . . . . . .
7.2.1 Approssimazione Lineare e Funzioni Differenziabili
7.2.2 Esercizi . . . . . . . . . . . . . . . . . . . . . . . .
7.2.3 Derivazione di Funzioni Composte . . . . . . . . . .
7.2.4 Esercizi . . . . . . . . . . . . . . . . . . . . . . . .
7.3 Derivate di Ordine Superiore . . . . . . . . . . . . . . . . .
7.3.1 Derivate Seconde e Superiori . . . . . . . . . . . . .
7.3.2 Esercizi . . . . . . . . . . . . . . . . . . . . . . . .
7.4 Massimi e Minimi . . . . . . . . . . . . . . . . . . . . . . .
7.4.1 Esercizi . . . . . . . . . . . . . . . . . . . . . . . .
7.5 Moltiplicatori di Lagrange . . . . . . . . . . . . . . . . . .
7.5.1 Gradienti e Condizioni di Lagrange . . . . . . . . .
7.5.2 Moltiplicatori di Lagrange . . . . . . . . . . . . . .
221
. 223
. 227
. 228
. 231
. 235
. 237
. 237
. 240
. 242
. 251
. 253
. 253
. 259
. 261
. 268
. 270
. 272
. 274
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
173
. 173
. 174
. 182
. 185
186
187
189
193
195
196
203
205
210
213
215
219
INDICE
vi
7.5.3
Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . 277
8 Integrazione
8.1 Cambio di Variabili negli Integrali Multipli . . . . . . . .
8.1.1 Coordinate Sferiche e Cilindriche . . . . . . . . .
8.1.2 Cambiamento di Variabile negli Integrali Multipli
8.2 Esercizi. . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3 Integrali Curvilinei . . . . . . . . . . . . . . . . . . . . .
8.3.1 Campi Vettoriali . . . . . . . . . . . . . . . . . .
8.3.2 Curve Orientate . . . . . . . . . . . . . . . . . . .
8.3.3 Calcolo degli Integrali Curvilinei . . . . . . . . . .
8.3.4 Esercizi . . . . . . . . . . . . . . . . . . . . . . .
8.4 Un Teorema Fondamentale . . . . . . . . . . . . . . . . .
8.4.1 Esercizi . . . . . . . . . . . . . . . . . . . . . . .
8.5 Il Teorema di Green . . . . . . . . . . . . . . . . . . . .
8.5.1 Un Risultato Analogo al Teorema Fondamentale .
8.5.2 Il Teorema di Green in Regioni con i Buchi . . . .
8.5.3 Esercizi . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
279
. 281
. 282
. 282
. 287
. 289
. 289
. 292
. 293
. 296
. 298
. 307
. 309
. 310
. 316
. 319
9 Superfici ed Integrazione
321
9.1 Curve, Superfici e Dimensioni . . . . . . . . . . . . . . . . . . 321
9.1.1 Parametrizzazione di una Superficie. Esempi. . . . . . 323
9.1.2 Esercizi. . . . . . . . . . . . . . . . . . . . . . . . . . . 326
9.2 Integrali di Superficie . . . . . . . . . . . . . . . . . . . . . . . 327
9.2.1 Definizione di Integrale Superficiale . . . . . . . . . . . 327
9.2.2 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . 335
9.3 Derivate ed Integrali di Campi Vettoriali . . . . . . . . . . . . 337
9.3.1 Integrali di Flusso . . . . . . . . . . . . . . . . . . . . . 337
9.3.2 Divergenza e Rotore: Derivate di un Campo Vettoriale 339
9.3.3 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . 344
9.4 Teoremi di Stokes e della Divergenza. . . . . . . . . . . . . . . 347
9.4.1 Cinque Teoremi . . . . . . . . . . . . . . . . . . . . . . 348
9.4.2 Teorema di Stokes . . . . . . . . . . . . . . . . . . . . 349
9.4.3 Da Stokes a Green . . . . . . . . . . . . . . . . . . . . 350
9.4.4 Il Teorema della Divergenza . . . . . . . . . . . . . . . 351
9.4.5 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . 356
10 Appendice 1
10.1 Gli operatori GRAD, DIV, ROT . . . . . . . . . . . . . . . .
10.1.1 Significato del Gradiente . . . . . . . . . . . . . . . .
10.1.2 L’operatore ∇ . . . . . . . . . . . . . . . . . . . . . .
359
. 359
. 359
. 362
INDICE
vii
10.1.3 Divergenza di un campo vettoriale. . . . . . . . . . . . 368
10.1.4 Rotore di un Campo Vettoriale . . . . . . . . . . . . . 372
INDICE
viii
”La matematica è il linguaggio
dell’intero Cosmo.
Chi non lo conosce non può leggere
il grandissimo libro dell’Universo”
Galileo Galilei, ”Il Saggiatore”
”Apprendere senza pensare
è tempo perso.
Pensare senza apprendere
è cosa vana”
Confucio
INDICE
ix
Prefazione
In queste note si intende presentare l’analisi delle proprietà delle funzioni
di più variabili sotto gli aspetti simbolici, numerici ed anche, quando possibile, grafici. Si assume che gli studenti abbiano seguito con profitto il corso di
Analisi I, ma non si intende comunque dare una presentazione rigorosa come
nei testi classici di Analisi Matematica. L’idea che muove la scrittura di
queste dispense è quella di fornire agli studenti uno strumento che permetta
loro di avvicinarsi ai concetti principali e ai metodi dell’analisi di funzioni di
più variabili e capire come questi estendano le idee e i metodi già incontrati
nel I corso.
Poiché, specialmente nel caso dell’analisi di più variabili, il calcolo e la
rappresentazione grafica possono essere a volte complicate, o comunque di
lettura non immediata, ed a volte l’intuizione geometrica più difficile da visualizzare, può essere di aiuto l’uso di strumenti tecnologici per illustrare e
confrontare i punti di vista grafico, numerico e simbolico.
Per questo facciamo uso e riferimento a Maple, ma altri programmi come
Mathematica, Derive, etc. possono esplicare la medesima funzione.
Ogni capitolo delle dispense è pensato per essere letto da cima a fondo.
Gli esempi, in particolare tendono a illustrare idee, a renderle concrete, a
fornire elementi per nuove idee piuttosto che come esemplificazione degli
esercizi.
Così, anche i grafici non sono decorazioni del testo, ma parte importante
nella crescita dell’intuizione geometrica. La capacità di visualizzare i problemi è altrettanto importante quanto quella di saperli impostare teoricamente.
Infine, la matematica non è un linguaggio naturale, ma ha un suo
vocabolario, una sua grammatica ed una sua sintassi. Imparare ad usare correttamente questo linguaggio è fondamentale per capire, impostare e risolvere
i problemi che l’analisi offre allo studente.
x
INDICE
Capitolo 1
Integrali Impropri
Ognuna delle scritture seguenti rappresenta un integrale improprio
Z +∞
Z +∞
Z +∞
1
1
1
dx
dx ,
dx ,
2
2
x
x
−∞ 1 + x
1
1
Z 1
Z 1
Z +∞
1
1
−x2
√ dx .
e dx ,
dx ,
2
x
0
0 x
0
L’aggettivo improprio è una etichetta attaccata ad integrali
che difRb
feriscono in qualche modo dagli integrali ordinari del tipo a f (x) dx, nei
quali l’intervallo [a, b] è un intervallo finito e la funzione f (x) è limitata,
quando non continua su [a, b] .
Gli integrali che vogliamo esaminare possono avere due diversi tipi di
“improprietà”:
• L’intervallo di integrazione può essere infinito, come nei primi quattro
esempi. Questo fatto contrasta con la definizione di integrale di Riemann che abbiamo dato al primo corso, perché la definizione formale
di integrale indefinito è basata sulla partizione di intervalli finiti.
• L’integrando può essere illimitato nell’intervallo di integrazione, come
negli ultimi due esempi. Anche questo fatto contrasta con la definizione
di integrale, nella quale si richiedeva la limitatezza della funzione su
tutto l’intervallo di integrazione.
Alcuni tipi di integrali, quali ad esempio
Z +∞
1
√
dx
x + x2
0
1
CAPITOLO 1. INTEGRALI IMPROPRI
2
ammettono entrambe le “improprietà”. Per essere risolti, come vedremo
più avanti, essi hanno bisogno di un’attenzione speciale che tenga conto di
entrambe le situazioni precedenti.
1.1
Convergenza e Divergenza: Idee Base ed
Esempi
Alcuni degli integrali presentati, sebbene impropri, ammettono comunque
come risultato un valore finito; essi vengono chiamati convergenti. Per gli
altri, l’improprietà è fatale, nel senso che non ammettono valore finito; essi
sono chiamati divergenti.
Iniziamo con alcuni esempi concreti.
Z +∞
1
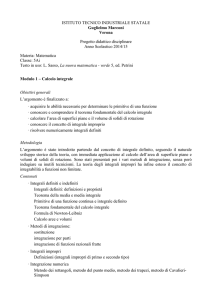
Esempio 1.1 Dare un senso al simbolo
dx .
x2
1
Soluzione. Cosa può voler significare l’integrale dato? Se l’interpretiamo geometricamente, esso rappresenta l’area racchiusa tra il grafico della
funzione integranda, l’asse delle x e la retta x = 1.
1
0.8
0.6
0.4
0.2
0
-0.2
2
4
x 6
8
10
R +∞ 1
dx come area
L’integrale improprio 1
x2
La regione si estende indefinitamente verso destra, può la sua area essere
finita?
la risposta è positiva; la ragione coinvolge l’uso dell’operazione di limite.
Per ogni numero r > 1, consideriamo
Z r
1
dx = area tra x = 1 e x = r .
2
1 x
Quest’area può essere calcolata esattamente:
¸r
Z r
1
1
1
dx = −
=1− .
2
x 1
r
1 x
1.1. IDEE BASE ED ESEMPI
3
Facendo tendere r → +∞, il risultato tende ad 1. in altre parole, l’area
totale della regione racchiusa dal grafico di 1/x2 , sebbene infinitamente lunga,
ammette area finita. In simboli
µ
¶
Z r
1
1
lim
dx = lim 1 −
= 1.
r→+∞ 1 x2
r→+∞
r
¥
Affermiamo perciò che l’integrale converge ad 1.
Z +∞
1
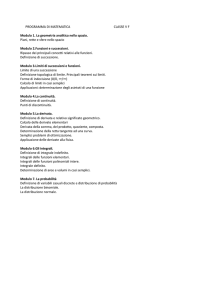
Esempio 1.2 Dire se
dx converge o diverge.
x
1
Soluzione. A prima vista la situazione sembra simile alla precedente
1
0.8
0.6
0.4
0.2
0
-0.2
2
4
x 6
8
10
R +∞ 1
dx come area
L’integrale improprio 1
x
Il problema, ancora una volta, è quello di capire se la regione illimitata, racchiusa tra il grafico della funzione integranda, l’asse delle x e la retta
x = 1, ammette area finita. Per dare una risposta a questa domanda, operiamo esattamente come prima. Consideriamo r > 1 e calcoliamo l’area
nell’intervallo [1, r] . Si ha
Z r
1
dx = ln x]r1 = ln r .
1 x
Adesso, facciamo il limite per r → +∞. Si ha limr→+∞ ln r = +∞.
Concludiamo perciò che questo integrale improprio diverge a +∞. In
simboli:
Z r
1
lim
dx = lim ln x]r1 = +∞ .
r→+∞ 1 x
r→+∞
Esempio 1.3 Dire se converge
ore.
Z
¥
+∞
−∞
1
dx. In tal caso, trovarne il val1 + x2
4
CAPITOLO 1. INTEGRALI IMPROPRI
Soluzione. L’integrale è improprio ad entrambi gli estremi, lo dividiamo
quindi in due integrali
Z 0
Z +∞
Z +∞
1
1
1
dx =
dx +
dx
2
2
1 + x2
−∞ 1 + x
0
−∞ 1 + x
che trattiamo separatamente. Cominciamo dall’ultimo integrando. Un calcolo diretto,
Z +∞
Z r
1
1
dx = lim
dx
2
r→+∞ 1 1 + x2
1+x
0
π
= lim arctan x]r0 = lim arctan r =
r→+∞
r→+∞
2
ci dice che l’integrale converge a π/2.
Poiché l’integrando è una funzione pari, anche il primo integrando ha lo
stesso valore. Ne segue che:
Z 0
1
π
dx = .
2
2
−∞ 1 + x
La conclusione è chiara: l’integrale dato converge a π. In simboli
Z +∞
Z 0
Z +∞
1
1
1
dx =
dx +
dx = π .
2
2
1 + x2
−∞ 1 + x
0
−∞ 1 + x
¥
I precedenti esempi mostrano anche una delle sottigliezze degli integrali
impropri, a cui fare attenzione. I grafici di 1/x2 e di 1/x appaiono simili:
entrambe le funzioni tendono a zero quando x → +∞. Tuttavia, il primo
grafico racchiude un’area unitaria, il secondo un’area infinita.
1.1.1
Un’altra Improprietà
Le improprietà degli esempi precedenti coinvolgono intervalli illimitati. Lo
stesso tipo di strategia sia applica nel caso di integrandi illimitati.
Z 1
1
Esempio 1.4 Discutere
dx .
2
0 x
Soluzione. In questo caso, la questione geometrica è quella di capire se
la regione illimitata verticalmente, rappresentata nel grafico seguente ha, o
meno, area finita.
1.1. IDEE BASE ED ESEMPI
5
100
80
60
40
20
0
0.2
0.4
x
0.6
0.8
1
R1 1
L’integrale improprio 0 2 dx come area
x
Per decidere la questione, troviamo ancora una volta il limite di un’area
- questa volta quando r tende a 0 da destra. Per ogni valore di r > 0 il
seguente integrale ha senso:
¸1
Z 1
1
1
1
dx = −
= − 1.
2
x r r
r x
Il risultato mostra che, quando r tende a 0+ , l’area in questione tende
all’infinito. In simboli:
µ
¶
Z 1
1
1
lim
− 1 = +∞ .
dx = lim+
r→0+ r x2
r→0
r
¥
Quindi, l’integrale diverge all’infinito.
1.1.2
La Definizione Formale
Abbiamo usato la stessa idea base per ognuno degli integrali precedenti,
sia che fosse illimitato l’intervallo di integrazione, o che fosse illimitata la
funzione:
Dapprima si localizza l’improprietà, a +∞ ( oppure a −∞ ), od ad un
estremo (finito) dell’intervallo di integrazione (se l’integrale è improprio in più
di un punto, lo si riscrive come somma di integrali più semplici, ognuno con
una sola improprietà). Quindi, ogni integrale con una sola improprietà viene
considerato come limite di un integrale ordinario, con un estremo variabile
che tende verso il valore “problematico”, da destra o da sinistra.
Nel primo caso esaminato (intervallo illimitato) la definizione è la seguente.
R +∞
Definizione 1.5 Consideriamo l’integrale I = a f (x) dx, dove f è una
funzione continua per x ≥ a. Se il limite
Z r
f (x) dx
L = lim
r→+∞
a
CAPITOLO 1. INTEGRALI IMPROPRI
6
esiste finito, allora I converge a L. Altrimenti, diverge.
Dal punto di vista grafico la questione riguarda il comportamento asintotico del grafico. Quando r → +∞ l’area converge o diverge?
Convergenza: cosa accade per r → +∞ ?
Gli integrali negli Esempi 2 e 4 divergono all’infinito. Il prossimo esempio
illustra un altro modo in cui l’integrale può non convergere.
R∞
Esempio 1.6 Dire se I = 0 cos x dx converge o meno.
Soluzione. La definizione ci da una risposta rapida. Infatti
Z r
cos x dx = sin x]r0 = sin r .
0
Ne segue che
lim
r→+∞
Z
0
r
cos x dx = lim sin r
r→+∞
Quest’ultimo limite non esiste: quando r → +∞ la funzione sin r oscilla tra
−1 e 1. Ne segue che I diverge.
¥
Diamo adesso una definizione di integrale improprio, simile alla precedente, ma più generale
Rb
Definizione 1.7 Sia I = a f (x) dx improprio in a o in b (i casi a = −∞
e b = +∞ sono permessi). Se
Z b
Z r
lim+
f (x) dx e lim−
f (x) dx
r→a
r
r→b
a
esistono ed hanno valore finito L, allora diremo che I converge ad L.
Altrimenti I diverge.
1.1. IDEE BASE ED ESEMPI
7
Nota:
• Ogni integrale improprio è il limite di un integrale proprio.
• Se c’è più di una improprietà (per es. se l’integrale è improprio ad
entrambi gli estremi), può essere spezzato in due integrali in modo
conveniente; l’intero integrale converge se convergono entrambi i termini.
Z +∞
1
Esempio 1.8 Discutere I =
dx .
x2
0
Soluzione. L’integrale è improprio ad entrambi gli estremi. Per separare
le improprietà scriviamo,per esempio:
Z 1
Z +∞
Z +∞
1
1
1
dx =
dx +
dx = I1 + I2 .
2
2
x
x2
0
0 x
1
Come abbiamo visto prima, I2 converge, ma I1 diverge a +∞. Ne segue che
I diverge.
¥
CAPITOLO 1. INTEGRALI IMPROPRI
8
1.1.3
Esercizi
1. Spiegare perché i seguenti integrali sono impropri
Z ∞
2
x2 e−x dx ;
(a)
0
Z 1
x
√
dx ;
(b)
x2 − 3x + 2
0
Z 4
1
dx ;
(c)
2
1 x ln x
Z 3
1
dx ;
(d)
2
0 x −x−2
Z π/2
tan x dx ;
(e)
0
Z 2π
cos x
√
dx
(f)
1 + cos x
0
Z ∞
1
dx diverge.
2. Mostrare che l’integrale improprio
x3
0
Z π/2
cos x
p
dx non è improprio.
3. Spiegare perché l’integrale
0
1 − sin2 x
4. Calcolare i seguenti integrali impropri
Z ∞
e−x dx ;
(a)
Z0 ∞
1
dx ;
(b)
x ln2 x
e
Z ∞
1
dx ;
(c)
x (1 + x)
1
Z 4
1
√ dx ;
(d)
x
0
Z 2
2x + 1
√
dx ;
(e)
3
x2 + x − 6
−2
Z ∞
e−x sin x dx ;
(f)
Zπ ∞
arctan x
dx ;
(g)
(1 + x2 )3/2
0
1.1. IDEE BASE ED ESEMPI
(h)
Z
4
2
9
x
p
dx .
|x2 − 9|
5. Trovare i valori del parametro a che rende il valore dell’integrale improprio minore di 10−5
Z ∞
e−x dx ;
(a)
Za ∞
1
dx ;
(b)
(1 + x2 )
a
Z ∞
1
dx .
(c)
x ln3 x
a
Z ∞
Z a
x dx = 0 . Spiegare perché
x dx diverge.
6. Mostrare che lima→+∞
−a
−∞
7. Dire se i seguenti integrali convergono o divergono. Nel primo caso
calcolarli.
Z ∞
x
dx ;
(a)
(1 + x2 )1/2
0
Z ∞
arctan x
dx ;
(b)
1 + x2
0
Z ∞
1
dx ;
(c)
x ln x
e
Z ∞
x
dx ;
(d)
(x − 42 )3
3
Z 2
ex dx ;
(e)
−∞
8
(f)
Z
1
√ dx ;
x
0
Z
3
x
√
dx ;
3−x
2
Z ∞
1
dx ;
(h)
x ln2 x
1
Z ∞
1
dx ;
(i)
−x
x
−∞ e + e
Z 1
x
√
dx .
(j)
1 − x2
0
(g)
CAPITOLO 1. INTEGRALI IMPROPRI
10
8. Mostrare che
Z
∞
1
Z
1
dx diverge.
x
∞
1
dx converge se p > 1.
xp
1
Z 1
1
dx ?
10. Per quali valori di p converge
p
0 x
Z ∞
1
dx ?
11. Per quali valori di p converge
x lnp x
e
Z e
1
dx ?
12. Per quali valori di p converge
p
1 x ln x
9. Mostrare che
13. valutare i seguenti integrali per tutti i valori di C per i quali converge
¶
Z ∞µ
C
2x
−
dx ;
(a)
x2 + 1 2x + 1
0
¶
Z ∞µ
3x
C
−
dx ;
(b)
x + 1 2x2 + 1
1
¶
Z ∞µ
1
Cx2
−
dx ;
(c)
x3 + 1 3x + 1
1
¶
Z ∞µ
C
1
√
dx ;
−
(d)
x2 + 4 x + 2
0
¶
Z ∞µ
1
Cx
−
dx .
(e)
x2 + 1 2x
1
14. Trasformare gli integrali impropri in integrali propri, usando le sostituzione date
Z ∞
x
dx , u = x−1 ;
(a)
3
x +1
1
Z π/2
√
cos x
√
dx , u = π − 2x .
(b)
π − 2x
0
Z ∞
Z ∞
1
x2
dx
=
dx .
15. Mostrare che
x4 + 1
x4 + 1
0
0
Z 1
Z ∞
3 −x
x e dx =
(− ln x)3 dx .
16. Mostrare che
17. Calcolare
Z
0
0
∞
x ln x
dx .
x4 + 1
0
1.2. CONVERGENZA
1.2
11
Come Determinare la Convergenza e Stimare i Limiti
Nel paragrafo precedente abbiamo introdotto il concetto di integrale
Z ∞ improf (x) dx,
prio e l’idea della sua convergenza. Dato l’integrale improprio
Z r 0
f (x) dx.
il problema è semplice quando siamo in grado di calcolare
0
Calcolare l’integrale precedente non è sempre semplice ed a volte è anche
impossibile. Anche nel caso in cui sia possibile calcolare l’integrale, può non
essere banale calcolarne il limite per r → ∞.
In questa situazione, è possibile, come nel caso degli integrali definiti,
usare metodi numerici per stimare gli integrali impropri. Per semplicità
esamineremo solo il caso degli integrali con un intervallo di integrazione
infinito.
1.2.1
Esempi Importanti
La stima numerica degli integrali impropri richiede
un’attenzione speciale.
R∞
Un problema è ovvio: l’integrale improprio 0 f (x) dx è calcolato su un
intervallo infinito, mente tutte le formule per la stima degli integrali definiti
coinvolgono la lunghezza dell’intervallo. Come applicarle?
I seguenti esempi suggeriscono alcune strategie per trattare queste difficoltà. Essi illustrano e motivano la teoria.
Z ∞
1
Esempio 1.9 Dire se I =
dx converge o diverge.
5
x +1
1
Soluzione. Il problema si enuncia facilmente:
Z r
1
dx?
Esiste il limite limr→+∞
5
1 x +1
Più difficile è rispondere simbolicamente. L’integrale dato non
ammette una primitiva semplice, ed anche se riuscissimo a scriverla, ricavare da essa il limite non sarebbe banale.
D’altra parte è invece relativamente semplice notare che
0<
1
1
<
per 1 ≤ x < +∞
x5 + 1 x5
e quindi che
Z r
Z r
1
1
dx <
dx
0<
5
5
1 x +1
1 x
qualunque sia r > 1 .
CAPITOLO 1. INTEGRALI IMPROPRI
12
ne risulta allora che
Z
lim
r→+∞
r
1
1
dx ≤ lim
5
r→+∞
x +1
Z
1
r
1
dx .
x5
Notiamo infine, che è relativamente semplice il calcolo del secondo
limite, si ha infatti
µ
¶
Z r
1
1
1
1
lim
− 4 = .
dx = lim
5
r→+∞ 1 x
r→+∞ 4
4r
4
Ne segue allora che
Z ∞
1
1
dx <
5
x +1
Z
Quindi l’integrale dato converge.
Z ∞
Esempio 1.10 Sappiamo che I =
1
1
∞
1
1
dx = .
5
x
4
¥
1
dx converge.
x5 + 1
A quale valore converge?
Soluzione. Come abbiamo visto il metodo simbolico non funziona, per questa ragione proviamo ad usare un metodo numerico.
Le regole dell’integrazione numerica si applicano però agli intervalli finiti [a, b]. Avendo chiare questa restrizione, dividiamo I in
due parti (per esempio)
Z 10
Z ∞
Z ∞
1
1
1
dx =
dx +
dx = I1 + I2
I=
5
5
5
x +1
x +1
1
1
10 x + 1
Notiamo, prima di tutto, che la scelta dell’intervallo [1, 10] è arbitraria, avremmo potuto scegliere [1, 100]. Il secondo integrale è
chiamato in gergo la coda di I; esso rappresenta l’area totale che speriamo piccola - del grafico alla destra di x = 10.
Cominciamo col calcolare I1 usando, per esempio 50 suddivisioni
di punto centrale. Il risultato (calcolato con Maple) è
Z 10
49
9 X
1
1
M50 =
dx ≈
≈ 0.178916 .
¢5
¡ 109
5
9
x +1
50 i=0
+
i
+
1
1
100
50
Ci aspettiamo che I1 approssimi il valore di I, ma qual’è l’approssimazione? Ci sono due fonti di errore:
1.2. CONVERGENZA
13
1. L’errore che M50 commette nello stimare I1 ;
2. L’errore dovuto all’avere ignorato la coda I2 .
Per quanto riguarda il primo tipo di errore, rimandiamo al (ai)
corsi di Calcolo Numerico, affermiamo solo, per completezza, che
la usuale formula della stima dell’errore per il punto medio ci dice
che in questo caso l’errore è minore di 0.0005.
Trovare una stima dell’errore per I2 ci rifacciamo all’esercizio
precedente. Ricordando la disuguaglianza
0<
1
1
<
x5 + 1
x5
per tutti gli x che ci interessano, si ha che
Z ∞
Z ∞
1
1
dx <
dx .
5
5
10 x + 1
10 x
Quest’ultimo integrale è semplice da calcolare:
¸r
Z ∞
1
1
1
= 2.5 · 10−5 .
dx = lim − 4
=
5
r→+∞
x
4x
40,
000
10
10
Il risultato è una limitazione superiore dell’errore che si commette
trascurando la coda I2 .
Possiamo allora concludere che la stima trovate, I ≈ 0.178916
ammette un errore minore di 5 · 10−4 + 2.5 · 10−5 = 5.25 · 10−4 .¥
1.2.2
Confronto di Integrali Impropri: Due Teoremi
Gli esempi precedenti hanno usato i confronti
Z ∞
Z ∞
Z ∞
Z ∞
1
1
1
1
dx
<
dx
<
dx
,
dx .
e
5
5
x5 + 1
x5
1
1
10 x + 1
10 x
Dalla prima disuguaglianza abbiamo ricavato la convergenza della serie, dalla
seconda una stima del valore della coda . Il seguente teorema garantisce la
legittimità di quanto fatto.
Teorema 1.11 (Confronto degli Integrali Impropri Nonnegativi).
Siano f e g funzioni continue. Supponiamo che per tutti gli x ≥ 0 si abbia
0 ≤ f (x) ≤ g (x) .
CAPITOLO 1. INTEGRALI IMPROPRI
14
• Se
R +∞
• Se
R +∞
a
R +∞
g (x) dx converge, allora converge anche a f (x) dx , inoltre
Z +∞
Z +∞
f (x) dx ≤
g (x) dx .
a
a
a
f (x) dx diverge, allora diverge anche
R +∞
a
g (x) dx .
Il teorema è utile da due punti di vista, sia per riconoscere convergenza
o divergenza, che per stimare il valore dei limiti. Illustriamo le affermazioni
con esempi.
R +∞
2
Esempio 1.12 Dire se I = 1 e−x dx converge. In caso di risposta positiva, stimare il valore del limite.
Soluzione. Dobbiamo determinare se esiste finito il valore del seguente
limite
Z r
2
lim
e−x dx .
r→+∞
1
Poiché non sappiamo trovare una primitiva dell’integrando, non ci rimane
che cercare di stimare il limite. Per vedere se I converge, cerchiamo di capire
se è possibile maggiorare l’integrando con una funzione di cui conosciamo la
primitiva e della quale sappiamo che l’integrale è convergente. Notiamo che
per tutti gli x ≥ 1 si ha che
2
2
e−x ≤ x e−x .
Applichiamo adesso il teorema, esso ci dice che
Z +∞
Z +∞
2
−x2
e dx ≤
x e−x dx .
1
1
Il secondo integrale si può calcolare, si ha:
#r
Z r
Z +∞
2
ex
1
−x2
−x2
.
x e dx = lim
x e dx = lim −
=
r→+∞
r→+∞
2
2e
1
1
0
Ne segue che I converge anch’esso a qualche limite (sconosciuto).
Per calcolare un valore approssimato dell’integrale procediamo
come negli esempi precedenti. Dividiamo I in due parti
Z +∞
Z 4
Z +∞
2
−x2
−x2
I=
e dx =
e dx +
e−x dx = I1 + I2 .
0
0
4
1.2. CONVERGENZA
15
Per stimare I1 usiamo, per esempio, M100 ≈ 0.886226 (la formula per la stima dell’errore da un valore minore di 0.00054). Per
valutare I2 si ha
Z +∞
Z +∞
1
2
−x2
e dx ≤
x e−x dx = 16 ≈ 0.000000056 .
I2 =
2e
4
4
Se ne conclude che il valore di I dista da 0.886226 per un errore
¥
inferiore alla terza cifra decimale.
L’idea del test del confronto è semplice. Il vero problema è quello di decidere quale integrale conosciuto confrontare con quello
incognito. Molti integrali impropri possono essere confrontati con
i seguenti “integrali di riferimento”
Z
Z
+∞
e−x dx = 1 ;
0
+∞
0
Z
0
1
1
dx =
p
x
p−1
+∞
se p > 1 ;
1
dx = +∞
xp
se p < 1 .
L’ultima equazione afferma che l’integrale diverge all’infinito.
Z +∞
1
Esempio 1.13 Dire se I =
dx converge o diverge.
x+1
0
R +∞
Soluzione. L’ovvio confronto sembrerebbe con 1 x1 dx che
diverge. Sfortunatamente, si ha che
1
1
≤
x+1
x
e quindi la divergenza del secondo integrale non ci dice niente
sulla divergenza di I. Tuttavia, per x ≥ 1 si ha che
1
1
≥
.
x+1
2x
CAPITOLO 1. INTEGRALI IMPROPRI
16
Ne segue che, per il Teorema 1.11 si ha
Z +∞
Z
Z +∞
1 +∞ 1
1
1
dx ≥
dx =
dx = +∞ ,
x+1
2x
2 1
x
1
1
quindi I diverge, come ci aspettavamo.
Esempio 1.14 Discutere la convergenza di I =
Z
+∞
3
¥
2x2
dx .
x4 + 2x + cos x
Soluzione. Osserviamo subito che per valori “grandi” di x il denominatore si comporta come x4 . Inoltre, per x ≥ 3 è sicuramente
2x + cos x ≥ 0 per cui
2
2x2
≤ 2 per x ≥ 3 ,
4
x + 2x + cos x
x
da cui
Z
3
+∞
2x2
dx ≤
x4 + 2x + cos x
Z
3
+∞
2
2
dx = .
2
x
3
Ne segue allora che I converge.
1.2.3
¥
Integrandi che Cambiano Segno. Convergenza
Assoluta
L’integrale
Z
1
+∞
sin x
dx
x2
converge o diverge ? Il Teorema 1.11 non ci aiuta perché si applica solo a
funzioni nonnegative. Tuttavia, il Teorema 1.11 ci dice qualcosa di utile.
Poiché
¯
¯
¯ sin x ¯
¯ ≤ 1 per tutti gli x ≥ 1 ,
¯
¯ x2 ¯ x2
ne segue che:
¯Z
¯
|I| = ¯¯
1
+∞
¯
¯ Z +∞ ¯
Z +∞
¯ sin x ¯
sin x ¯¯
1
¯
¯
dx ≤
dx¯ ≤
dx = 1 .
¯
¯
2
2
x
x
x2
1
1
Ciò fa supporre che anche I converga, poiché I ≤ |I|. Il seguente teorema
giustifica l’ipotesi fatta.
1.2. CONVERGENZA
17
Teorema 1.15 (Convergenza Assoluta) Siano f e g funzioni continue
tali che per tutti gli x ≥ a si abbia
Supponiamo che
verge, e si ha
R +∞
a
0 ≤ |f (x)| ≤ g (x) .
g (x) dx converga. Allora anche
¯Z
¯
¯
¯
a
+∞
¯ Z
¯
f (x) dx¯¯ ≤
R +∞
a
f (x) dx con-
+∞
g (x) dx .
a
¯
¯R
¯
¯ +∞
Il Teorema 1.15 afferma, tra l’altro, che se ¯ a f (x) dx¯ converge, lo
R +∞
stesso fa a f (x) dx. La condizione è chiamata di convergenza assoluta.
Suggerimenti per la Coda
In ogni integrale improprio, ciò che va visto con attenzione è il comportamento della coda. infatti, ogni integrale di questo tipo, come abbiamo visto,
può essere diviso in due parti come segue:
I=
Z
+∞
f (x) dx =
a
Z
b
f (x) dx +
Z
+∞
f (x) dx .
b
a
Il primo termine è un integrale proprio e può essere trattato sia ricercando
la primitiva, sia per via numerica. La convergenza di I dipende solo dalla
convergenza del secondo termine. Se la coda converge, converge l’integrale.
Se, meglio ancora, riusciamo a rendere piccola la coda, come negli esempi
precedenti, allora il primo termine approssima bene il valore dell’integrale.
Il confronto, nel senso dei due teoremi precedenti, è la chiave per avere
una coda piccola. Illustriamo questo fatto con un ultimo esempio.
Z
+∞
Z
+∞
sin x
dx convergono.
x2
1
1
Per ognuno di essi trovare una coda di valore assoluto minore di 10−3 .
Esempio 1.16 Entrambi I =
−x
e
dx e J =
R +∞Soluzione. Per ognuno dei due integrali bisogna trovare un b tale che
f (x) dx < 0.001.
b
Per I, trovare b è relativamente facile. Basta notare che per ogni b si ha
Z +∞
¤r
1
e−x dx = lim −e−x b = e−b = b .
r→+∞
e
b
CAPITOLO 1. INTEGRALI IMPROPRI
18
Quindi,
Z +∞
b
e−x dx =
1
< 0.001 =⇒ eb > 1000 ⇐⇒ b > ln 1000 ≈ 6.9 .
b
e
Per trattare J, abbiamo bisogno del Teorema 1.15. Poiché
¯
¯
¯ sin x ¯
1
¯
¯
¯ x2 ¯ ≤ x2
il Teorema 1.15 garantisce che
¯Z +∞
¯ Z +∞
¯
sin x ¯¯
1
¯
dx¯ ≤
dx .
¯
2
x
x2
b
b
Si ottiene quindi che
Z +∞
1
1
dx = < 0.001 ⇐⇒ b > 1000.
2
x
b
b
¥
1.2. CONVERGENZA
1.2.4
19
Esercizi
1. (a) Spiegare perché la disuguaglianza x − 1 ≤ x + sin x ≤ x + 1 è
valida per tutti gli x ∈ R.
(b) Usare il test del confronto ed una delle disuguaglianze precedenti
per mostrare che l’integrale improprio
Z ∞
1
dx
x + sin x
2
diverge.
(a) Spiegare perché la disuguaglianza x2 ≤ x2 +
per tutti gli x ≥ 1.
√
x ≤ 2x2 è valida
(b) Usare il test del confronto ed una delle disuguaglianze precedenti
per mostrare che l’integrale improprio
Z ∞
1
√ dx
2
x + x
1
converge.
√
√
√
(a) Spiegare perché la disuguaglianza x ≤ x2 + x ≤ 2 x è valida
per tutti gli x ≤ 1.
(b) Usare il test del confronto ed una delle disuguaglianze precedenti
per valutare se l’integrale improprio
Z 1
1
√ dx
2
x
0 x +
converge.
(c) Dire se l’integrale improprio
Z ∞
0
x2
1
√ dx
+ x
converge o meno.
(a) Spiegare perché la disuguaglianza 12 x2 ≤ x2 −
per tutti gli x ≥ 2
√
x ≤ x2 è valida
(b) Usare il test del confronto ed una delle disuguaglianze precedenti
per valutare se l’integrale improprio
Z ∞
1
√ dx
x2 − x
3
converge.
CAPITOLO 1. INTEGRALI IMPROPRI
20
(a) Mostrare che la disuguaglianza
gli x ≥ 0.
ex
1
≤
≤ 1 è valida per tutti
2
1 + ex
(b) Usare il test del confronto ed una delle disuguaglianze precedenti
per valutare se l’integrale improprio
Z ∞
ex
dx
1 + ex
0
converge.
1
1
x
≤ √ è valida
≤ √
(a) Mostrare che la disuguaglianza √
x
2x
1 + x3
per tutti gli x ≥ 1
(b) Usare il test del confronto ed una delle disuguaglianze precedenti
per valutare se l’integrale improprio
Z ∞
x
√
dx
1 + x3
0
converge.
(a) Mostrare che la disuguaglianza
tutti gli x ≥ 1.
√
√
√
x ≤ 1 + x ≤ 2 x è valida per
(b) Usare il test del confronto ed una delle disuguaglianze precedenti
per valutare se l’integrale improprio
Z ∞
1
√ dx
1+ x
0
converge o meno.
2. Per ognuno dei seguenti integrali impropri , trovare un integrale definito che approssimi gli integrali dati a meno di 10−5 (Non calcolare
l’integrale definito).
Z
∞
1
dx ;
+ ex
0
Z ∞
1
√
dx ;
(b)
x4 2x3 + 1
1
Z ∞
arctan x
dx ;
(c)
(1 + x2 )3
0
(a)
x2
1.2. CONVERGENZA
(d)
Z
0
∞
21
e−x
dx
2 + cos x
3. Considerate l’integrale I =
Z
e
∞
1
dx .
ln2 x
(a) Spiegare perché I è un integrale improprio;
(b) Mostrare che 1 ≤ ln2 x ≤ x2 per tutti gli x ≥ e ;
(c) Spiegare perché le disuguaglianze in (b) non ci aiutano a valutare
la convergenza o meno di I.
√
(d) Mostrare che 1 ≤ ln x ≤ x per tutti gli x ≥ e ;
(e) Mostrare che I diverge.
(a) Mostrare che 0 ≤
x
2
≤ sin x se 0 ≤ x ≤ 1;
(b) Usare le disuguaglianze precedenti per mostrare che l’integrale
improprio
Z 1
1
√
dx
sin x
0
converge.
Z ∞
1
√
dx .
4. Sia I =
x + x4
0
(a) Spiegare perché I è improprio;
(b) Mostrare che 1 ≤ I ≤ 3
5. Per ognuno degli integrali seguenti, usare il test del confronto per
determinare se gli integrali convergono o meno
Z ∞
1
dx ;
(a)
1 + x4
0
Z ∞
1
√
dx ;
(b)
x−1
2
Z ∞
esin x dx
(c)
0
Z ∞
1
√
dx ;
(d)
x x+1
1
CAPITOLO 1. INTEGRALI IMPROPRI
22
(e)
(f)
(g)
(h)
(i)
(j)
(k)
Z
∞
1
dx ;
x + ex
0
Z ∞
1
dx ;
x + e−x
0
Z ∞
1
√
dx ;
3 x6 + x
1
Z ∞ √
x
dx ;
x+1
0
Z ∞
x
dx ;
ln x
3
Z ∞
1
√ dx ;
(x + 1) x
0
Z ∞
sin2 x
dx ;
(x + 1)2
0
Z
1
Z
∞
1
√
dx .
x + x3
0
1
Z ∞ −x
e
√ dx converge;
(a) Mostrare che l’integrale improprio
x
0
Z
(b) Trovare α e β in modo tale che l’integrale definito
6. Mostrare che
1
√
dx =
x + x3
β
e−x
√ dx
x
α
approssimi l’integrale improprio della parte (a) a meno di 5 · 10−3 .
Z x√
te−t dt .
7. Sia f (x) =
3
(a) Mostrare che limx→∞ f (x) esiste finito;
(b) Trovare a in modo tale che f (a) approssimi
di 10−3 .
Z ∞
3
f (x) dx dove f (x) = e−x sin2 x.
8. Sia I =
Z
∞
√ −t
te dt a meno
3
0
(a) Mostrare che I converge;
(b) Trovare una stima di I a meno di 5 · 10−3 . Spiegare come si è
ottenuta l’accuratezza della stima. [Sugg.: per ogni x ≥ 0,
−3 < f 00 (x) < 2 e −44 < f (4) (x) < 61.]
1.2. CONVERGENZA
(a) Mostrare che
23
Z
1
∞
cos x
dx converge.
x2
Z
∞
sin x
dx con(b) Usare l’integrazione per parti per mostrare che
x
1
verge.
Z ∞
sin (ex ) dx converge [Sugg.:
(c) Usare (a) e (b) per mostrare che
usare la sostituzione u = ex .]
0
24
CAPITOLO 1. INTEGRALI IMPROPRI