UNIVERSITÀ DEGLI STUDI ROMA TRE
Dipartimento di matematica e fisica;
Sezione di fisica.
SIMMETRIE DINAMICHE
IN GEOMETRIA SFERICA
l’oscillatore armonico e il problema di Keplero-Coulomb
Candidato: Raffaele Silvestri
Relatore:
Prof. Orlando Ragnisco
1
Indice
1 Introduzione
3
2 Meccanica classica sulla sfera
2.1 Sistema di coordinate . . . . . . . . . . . . . . . . . . . . . .
2.2 Dinamica in presenza di un generico potenziale centrale V(r):
2.2.1 Equazione differenziale dell’orbita . . . . . . . . . . . .
2.3 Dinamica in presenza di potenziale Kepleriano e armonico . .
2.4 Costanti del moto . . . . . . . . . . . . . . . . . . . . . . . . .
2.4.1 Problema di Keplero . . . . . . . . . . . . . . . . . . .
2.4.2 Problema dell’oscillatore armonico . . . . . . . . . . .
3 Meccanica Quantistica sulla sfera
3.1 Problema di Keplero . . . . . . . . . . . . . .
3.1.1 Risoluzione dello spettro . . . . . . . .
3.1.2 Relazioni di ricorrenza e autofunzioni .
3.2 Oscillatore Armonico . . . . . . . . . . . . . .
3.2.1 Risoluzione dello spettro . . . . . . . .
3.2.2 Relazioni di ricorrenza e autofunzioni .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4 Conclusioni
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4
4
6
7
8
9
9
16
.
.
.
.
.
.
22
22
23
28
30
31
35
38
• Le formule contrassegnate con* sono state verificate tramite l’utilizzo del software
Mathematica.
• Gli apici
[n]
• Gli apici
n
numerici fra parentesi quadre sono i riferimenti bibliografici.
numerici rimandano alle note.
2
1 Introduzione
È noto (Bacry, Ruegg e Souriau 1966, Stehle e Han 1967) che l’Hamiltoniana di una
particella non-relativistica in moto in uno spazio Euclideo N-dimensionale, sotto l’azione
di sole forze centrali conservative, è invariante rispetto ad un gruppo di Lie1 più ampio
di SO(N )2 in soli due casi particolari: Questi sono il problema di Keplero, per il quale il gruppo di simmetria più elevato è SO(N + 1) per sistemi legati (gruppo compatto) e SO(N, 1) per sistemi non legati (gruppo non compatto) e l’oscillatore armonico,
il cui gruppo di simmetria è SU (N ) 3 . In meccanica classica la particolarità che distingue questi due sistemi è che, in presenza di tali forze centrali, tutte le orbite limitate si chiudono (teorema di Bertrand 1873); mentre in generale, per tutte le forze centrali, si possono costruire costanti del moto che specificano rispettivamente l’ampiezza dell’orbita (energia) e l’orientazione del piano orbitale (momento angolare). In particolare,
nel problema di Keplero, vi sono, in aggiunta all’energia e alle componenti del momento
angolare, altre costanti del moto, ovvero le componenti del vettore di Runge-Lenz (Laplace 1827, Runge1919, Lenz 1925); tale vettore è parallelo all’asse maggiore dell’orbita
ed è una misura della sua eccentricità. Nel caso dell’oscillatore le quantità conservate sono invece le componenti di un tensore simmetrico del secondo ordine (tensore di
Fradkin[5] ) complanare con l’orbita e con gli stessi assi principali . In ogni caso la più
alta simmetria è rivelata quando si costruisce l’algebra delle parentesi di Poisson delle costanti del moto: se il Runge-Lenz (o tensore di Fradkin ) è opportunamente normalizzato, questa algebra ha la struttura dell’algebra di Lie del gruppo SO(N +1) (o SU (N )). Da
notare che queste simmetrie addizionali non sono di tipo geometrico (ovvero, non possono essere espresse come mappature del solo spazio delle configurazioni); sono simmetrie
nello spazio delle fasi, per cui viene spesso utilizzato il termine ”simmetrie dinamiche”.
In meccanica quantistica, dove le parentesi di Poisson sono sostituite dai commutatori,
le tecniche standard della teoria della rappresentazione matriciale degli operatori consentono di calcolare, per questi due sistemi, sia lo spettro dell’Hamiltoniana che la degenerazione di ogni livello energetico rispetto agli autovalori del momento angolare, che deve essere quella di una rappresentazione irriducibile del gruppo di simmetria più elevato (Pauli[4] , Fock 1935, Jauch e Hill 1940, Baker 1956). In questo lavoro il calcolo
dello spettro e delle relative autofunzioni è stato eseguito nel caso tridimensionale per un
potenziale di tipo Kepleriano e bidimensionale per un potenziale di oscillatore armonico.
Ad un gruppo di Lie è associata univocamente un algebra di Lie (e non vice-versa),spazio vettoriale astratto in cui sono verificate le seguenti relazioni di commutazione tra i generatori del
gruppo{Xk }k∈N :
·anti-simmetria: {Xi , Xj } = − {Xj , Xi }, bilinearità {λXi + βXj , Xk } = λ {Xi , Xk } + β {Xj , Xk } .
l
l
·legge di composizione: {Xj , Xk } = Cjk
Xl ,dove i coefficenti Cjk
sono chiamate costanti di struttura
del gruppo .
·identità di Jacobi: {Xj , {Xk , Xl }} + {Xl , {Xj , Xk }} + {Xk , {Xl , Xj }} = 0.
2
SO(N ) è il gruppo ortogonale speciale (N è la dimensione dello spazio), che contiene tutte le trasformazioni ortogonali a determinante unitario,in modo da conservare l’operazione di prodotto scalare
tra vettori; il gruppo SO(3) definisce quindi le rotazioni spaziali in R3 (spazio Euclideo ordinario a 3
dimensioni).
3
SU (N ) è il gruppo unitario speciale, che contiene tutte le trasformazioni unitarie con det U = 1.
1
3
2 Meccanica classica sulla sfera
2.1 Sistema di coordinate
Lo scopo principale è quello di analizzare i suddetti sistemi dinamici in una geometria
non-Euclidea ponendosi in uno spazio curvo N-dimensionale4 . Vi sono diversi sistemi di
coordinate definiti in uno spazio curvo che rappresentano, in maniera efficace, un modo
per generalizzare il sistema di coordinate Cartesiano in geometria Euclidea. Ponendosi su
di una sfera, che è il caso più semplice ed intuitivo di spazio curvo, si è dimostrato che, considerata una certa proiezione della N-sfera (immersa in uno spazio euclideo a N+1 dimensioni) su di un N-piano tangente alla sfera stessa, si ottengono orbite chiuse per gli
stessi potenziali per cui si ottengono nel caso euclideo (Lakshmanan,Eswaran[6] ). Si
consideri una sfera in uno spazio N+1 dimensionale: 5
q02 + qi qi = λ−1
(1)
doveλ = 1/R2 è la curvatura della sfera e {q0 , qi }i=1,...,N sono le coordinate cartesiane definite nello spazio Euclideo a N+1 dimensioni. Le variabili indipendenti {qi }N
i=1
sono le proiezioni ortogonali dei punti della sfera sul piano tangente, il loro dominio è
qi qi ≤ λ−1 così che ad ogni insieme {qi } corrispondono due punti della sfera. Nel seguito
verrà utilizzata un’altro tipo di proiezione che, nel linguaggio cartografico, prende il nome
di gnomonica e consiste nel proiettare i punti della sfera, partendo dal suo centro, sul
piano tangente ad essa. Il vantaggio di tale proiezione rispetto alle altre, nell’analisi del
moto di una particella su di una sfera, deriva dal fatto che il moto libero sulla sfera (o
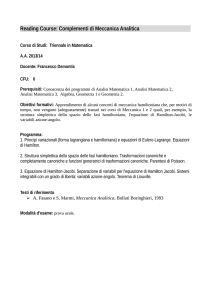
moto uniforme su un cerchio massimo) si tramuta in un moto rettilineo, ma non uniforme, sul piano tangente (vedi figura 1). In altre parole, le orbite della particella libera,
proiettate sul piano tangente, sono lo stesse che si avrebbero in una geometria euclidea; la curvatura influisce solo sulla velocità del moto proiettato. Verrà mostrato (par
2.2.1) che questa caratteristica persiste anche in presenza di una forza centrale derivata da un generico potenziale V (r). Le componenti cartesiane di tale proiezione sono le
variabili{xi }N
i=1 e la relazione matematica tra le due proiezioni è la seguente:
qi = xi (1 + λr2 )− /2 .
1
(2)
Infatti, si considera (figura 1) Q ≡ {q0 , q1 , ..., qN }, generico punto della sfera, e P ≡
{x1 , ..., xN }come la sua proiezione sul piano tangente ad un arbitrario punto S della
sfera (polo sud). Sia inoltreN la proiezione ortogonale di Q sull’asse q0 e C il centro
Più precisamente lo spazio topologico in questione è una varietà differenziabile in cui viene definita una
metrica, è quindi presente la nozione di distanza (lunghezza, area, volume, geodetica, ecc..). Queste
tipologia di spazi sono dette varietà Riemanniane.
5
D’ora in avanti per praticità si utilizzerà la notazione di Einstein, ovvero in qualsiasi fattore dove
appaiano
indici ripetuti
la somma su tutti i possibili valori che l’indice può assumere. Es:
PN +1
PN è implicita
2
2
q
q
=
q
+
q
q
≡
q
+
qi qi .
i
i
i
i
0
0
i=0
i=1
4
4
\
[ sono simili6 . In
della sfera; a questo punto è evidente che i due triangoli N
CQ e SCP
Q
virtù di tale proprietà si ha che N
= CQ
→ xqii = √r2R+R2 quindi qi = xi (1 + r2/R2 )−1/2
SP
CP
dove r2 = xi xi .
figura 1: rappresentazione 3-dimensionale di una proiezione gnomonica.
2
2
Dalla (1) e (2) si ottiene la nuova
PN metrica: ds = dq0 + dq · dq , dove dati due vettori
N
qualsiasi x, y ∈ R , x · y ≡ i=1 xi yi = xi yi è il loro prodotto scalare. Differenziando
qi = xi (1 + λr2 )−1/2 si ottiene
dqi = dxi (1 + λr2 )− /2 − λxi (x · dx)(1 + λr2 )− /2 ,
1
3
quindi
dq · dq = dx · dx(1 + λr2 )−1 − 2λ(x · dx)2 (1 + λr2 )−2 + λ2 r2 (x · dx)2 (1 + λr2 )−3 ,
inoltre dato che q0 = (λ−1 − q · q) si ha che
dq02 = (q · dq)2 (λ−1 − q · q)−1 = λ(x · dx)2 (1 + λr2 )−3 ,
a questo punto la distanza spaziale infinitesima in una metrica “gnomonica” risulta
essere:
ds2 = dx · dx(1 + λr2 )−1 − λ(x · dx)2 (1 + λr2 )−2 .
(3)
6
Sono triangoli rettangoli con un angolo comune,di conseguenza hanno tre angoli fra loro
congruenti,condizione sufficiente per la similitudine.
5
2.2 Dinamica in presenza di un generico potenziale centrale V(r):
Una volta in possesso dell’elemento metrico (3) si può procedere con il calcolo del modulo
2
quadro della velocità v 2 = s =
ds2
;
dt2
basta sostituire al differenziale della coordinata la
2
2
2 −1 − λ(x · x)2 (1 + λr 2 )−2 .
sua derivata temporale dx → dx
dt ≡ x ottenendo s = x (1 + λr )
La dinamica del sistema (particella libera) è ora completamente descritta dalla sua
Lagrangiana (energia cinetica); in presenza di un generico potenziale V (r) ,dipendente solamente dal modulo della posizione (sistema soggetto a sole forze centrali), si ha
2
2
L(x, x) = 21 s − V (r), dove 21 s è l’energia cinetica del sistema7 . Per ricavare l’Hamiltoniana si effettua prima il calcolo del momento coniugato p (impulso) alla variabile x
(coordinata) , definito nel seguente modo p =
∂L(x,x)
∂x
e si ottiene:
p = x(1 + λr2 )−1 − λx(x · x)(1 + λr2 )−2 .
(4)
Ora, tramite la trasformata di Legendre della Lagrangiana, si può facilmente scrivere
Hamiltoniana del sistema in termini degli impulsi e delle coordinate H(p, x) = p · x −
L(x, x). Qui verrà mostrato un metodo alternativo di scrittura per i funzionali L(x, x) e
H(p, x) utilizzando il formalismo dei tensori, che in molti casi rappresenta un metodologia
di calcolo più concisa e compatta. La Lagrangiana di particella libera scritta in notazione
covariante8 è:
1 ij
L(x, x) = gij x x
(5)
2
2
ij
i
ij
,dove gij è il tensore metrico e s = gij x x ; l’Hamiltoniana risulta H = pi x − 12 gij x x
,dove pi =
i
∂L
∂ xi
j
= gij x data la simmetria del tensore metrico; la relazione inversa è
x = g ij pj . La forma dell’Hamiltoniana è quindi la seguente H = pi g ij pj − 21 gij g ik pk g jl pl
e, tenendo conto di alcune regole base sugli indici in un prodotto fra due o più tensori
gij g jl g ik = gil g ik = g lk ,si ha
1
H(p, x) = g ij pi pj .
(6)
2
dove p2 = g ij pi pj . Per facilitare il calcolo del tensore metrico gij e dell’inverso g ij si
considera il caso più semplice possibile ponendosi in uno spazio bidimensionale; dalla
definizione di tensore metrico: ds2 ≡ gij dxi dxj con i, j = 0, 1 e gij = gji , si ha che
ds2 = goo dx2 +2g01 dxdy+g11 dy 2 . Eguagliando quest’ultima equazione alla (3) si ricavano
facilmente le componenti del tensore, la sua forma matriciale è la seguente:
1
1 + λy 2 −λxy
g=
(7)
(1 + λr2 )2 −λxy 1 + λx2
7
8
Per praticità nella seguente trattazione si porrà la massa ad uno.
...in
Dato un generico tensore Tji11...j
, quest’ultimo potrà essere scritto in notazione covariante (indici in
m
basso), mentre per il suo inverso si utilizza la notazione controvariante (indici in alto).
6
Il determinante di g è (1 + λr2 )−3 e la matrice inversa è:
1 + λx2
λxy
−1
2
g = (1 + λr )
λxy
1 + λy 2
(8)
Infine la (6) si scrive H = 12 (g 00 p2x + 2g 01 px py + g 11 p2y ) = 21 (1 + λr2 )[(1 + λx2 )p2x +
2λxypx py + (1 + λy 2 )p2y ], svolgendo i calcoli e raggruppando si ottiene 21 (1 + λr2 )[p2x +
p2y + λ(xpx + ypy )]. Nella sua forma finale e più generale, valida anche per un numero di
dimensioni più elevato, ed in presenza di un potenziale centrale, l’Hamiltoniana si scrive:
1
H(p, x) = (1 + λr2 )(p2 + λ(x · p)2 ) + V (r).
2
(9)
La simmetria di H rispetto a rotazioni implica che il generatore di tale trasformazione
sia una quantità conservata. Il generatore delle rotazioni è il momento angolare e viene
definito nella sua forma più generale come un tensore antisimmetrico di rango 2 a elementi
nulli sulla diagonale principale:
(10)
Lij ≡ xi pj − xj pi
la costanza di questa grandezza implica che ogni orbita proiettata “gnomonicamente”
giace sul piano Lij xj = 09 Il modulo quadro del momento angolare viene definito come
L2 ≡ 21 Lij Lij = − 21 T r(L2 ) , dove il fattore 1/2 tiene conto dell’antisimmetria di Lij , contando solo una volta i suoi termini non diagonali; se si procede con il calcolo esplicito si ottiene 12 Lij Lij = 21 (xi pj xi pj −xi pj xj pi −xj pi xi pj +xj pi xj pi ) = 12 (2xi xi pj pj −2xi pi xj pj ) =
r2 p2 − (x · p)2 quindi
L2 = r2 p2 − (x · p)2
(11)
2.2.1 Equazione differenziale dell’orbita
Al fine di ricavare l’equazione dell’orbita si effettua il passaggio a coordinate polari10
(definite sul piano tangente alla sfera con origine nel polo Sud) e la conseguente riscrittura
delle grandezze dinamiche fondamentali precedentemente calcolate:
(
xi = r cos θ
→
xj = r sin θ
(
xi = r cos θ − rθ sin θ
(12)
xj = r sin θ + rθ cos θ
In uno spazio N-dimensionale Lij xj non è altro che la componente i-esima del prodotto vettore generalizzato o, prodotto riga per colonna tra la matrice L ed il vettore posizione x; dalla definizione
generale (x ∧ L)i ≡ Lij xj = xi xj pj − x2j pi si può considerare il caso particolare in cui N=3 e si ottiene
(x ∧ L)3 = L31 x1 + L32 x2 = x3 x1 p1 − x21 p3 + x3 x2 p2 − x22 p3 = [x ∧ (x ∧ p)]3 .
10
In realtà, più in generale, si sarebbe dovuto effettuare il calcolo in coordinate ipersferiche; ma per
semplicità di calcolo si considerano solamente due coordinate xi e xj indipendenti, definite in uno
spazio bidimensionale (coordinate polari). In ogni caso il risultato finale non cambia.
9
7
2
e dalle relazioni (11) si ottiene il modulo quadro della velocità x = (xi xi + xj xj ) =
2
r + r2 θ , quindi si procede al calcolo di x · x = (xi xi + xj xj ) = rr. Sostituendo le due
2
espressioni precedenti all’energia cinetica del sistema T = 12 [x (1 + λr2 )−1 − λ(x · x)2 (1 +
λr2 )−2 ] si ottiene l’Hamiltoniana in coordinate polari
1 2
2
H(r, θ) = [r2 θ (1 + λr2 )−1 − r (1 + λr2 )−2 ] + V (r).
2
(13)
Considerando ora l’espressione (10) per il momento angolare Lij = xi [xi (1 + λr2 )−1 −
λxi (x · x)(1 + λr2 )−2 ] − (i ↔ j) = (1 + λr2 )−1 xi xj − xj xi , quindi:
L = (1 + λr2 )−1 r2 θ
(14)
dr dθ
dr
per ottenere l’equazione dell’orbita si riscrive r ≡ dr
dt = dθ dt = dθ θ, così che la (12) si
dr 2 −4
) r ] + V (r) = E o equivalentemente:
può scrivere come 12 L2 [r−2 (1 + λr2 ) + ( dθ
1 2 −2
dr
1
L [r + ( )2 r−4 ] + V (r) = E − λL2 .
2
dθ
2
(15)
che rappresenta l’equazione differenziale dell’orbita11 . Grazie a questa riscrittura dell’energia totale si nota facilmente che il parametro di curvatura λ appare solo all’interno
dell’espressione E − 12 λL2 , in altre parole il suo effetto è lo shift dell’energia totale del
sistema di un fattore 21 λL2 , ma non ha alcuna influenza sulla forma dell’orbita. Ciò sta
a significare che, anche in presenza di un potenziale centrale V (r), l’orbita proiettata
rimane la stessa che nel caso Euclideo (λ → 0 ,curvatura nulla).
2.3 Dinamica in presenza di potenziale Kepleriano e armonico
Considerando due tipi particolari di potenziali centrali, uno inversamente proporzionale
alla distanza r tra i due corpi interagenti −µ/r (Keplero) e l’altro direttamente proporzionale al suo quadrato 21 ω 2 r2 (oscillatore armonico), con µ e ω costanti reali, riscritti
in termini della coordinata angolare χ , definita sulla sfera tramite la seguente relazione
tan χ = λ1/2 r = r/R (S ĈP ≡ χ),
1
(Keplero)
−µλ /2 cot χ
V (r) =
(16)
1 2 −1
tan χ
(oscillatore)
2ω λ
11
Integrando l’equazione differenziale (14) si può ottenere la forma funzionale esplicita dell’angolo orbitale, è utile a tale proposito definire l’energia generalizzata E(λ, L2 ) = E − 21 λL2 e un potenziale
L2
√ Ldr
efficace Vef f = 2r
e integrando si ha
2 + V (r) , separando le variabili si riscrive dθ =
r 2 2(E−Vef f )
´r
dr
θ = θ0 + r0 2 q 2
.
r
L2
(E−Vef f )
8
si nota che; nel caso Kepleriano (o Coulombiano), il potenziale è chiaramente antisimmetrico tra i due emisferi e se µ > 0 , ha una singolarità attrattiva all’origine χ = 0 (polo Sud) e una singolarità repulsiva nel punto antipodaleχ = π (polo Nord). Inoltre, a differenza del caso euclideo, qui tutte le orbite sono chiuse, poiché la sfera è compatta; le orbite proiettate che non si chiudono (iperboli) corrispondono a orbite chiuse che attraversano l’equatore χ = π2 . Nel limite in cui la curvatura tende a zero λ → 0 si riottiene l’orbita
Euclidea Kepleriana attrattiva, sia limitata che illimitata, nell’emisfero sud e le orbite illimitate di un potenziale di tipo Coulomb repulsivo nell’emisfero nord. D’altra parte, un potenziale di oscillatore armonico è chiaramente simmetrico tra i due emisferi ed
ha una singolarità sull’equatore. Le orbite possibili sono limitate a un emisfero o all’altro e acquisiscono la stessa forma su ciascuno di essi; inoltre, come accade in uno
spazio Euclideo, soluzioni all’equazione dell’ orbita esistono solamente se ω 2 è non negativo. Infine è importante notare che, a causa della singolarità all’equatore, nel limite in
cui ω 2 → 0, non si ottiene il moto libero di una particella, ma piuttosto un moto
libero con una barriera di potenziale riflettente all’equatore.
2.4 Costanti del moto
In questa sezione si vuole costruire l’algebra delle parentesi di Poisson delle costanti del moto per i due rispettivi potenziali: vettore di Runge-Lenz per il problema di
Keplero e tensore di Fradkin per l’oscillatore armonico.
2.4.1 Problema di Keplero
In assenza di curvatura: In assenza di curvatura le componenti cartesiane del vettore
di Runge-Lenz sono definite nel seguente modo12 :
Ri ≡ −Lij pj +
µxi
r
(17)
1 2 µ
13
14
la parentesi di Poisson
con
l’Hamiltoniana H = 2 p − r risulta : {Ri , H} = −Lij {pj , H}−
x
{Lij , H} pj + µ ri , H con {Lij , H} = 0 ,il momento angolare è infatti una quantità
conservata; di seguito la verifica di quest’ultima asserzione: 15
12
13
14
Nello spazio ordinario a N=3 il medesimo vettore risulta R = L ∧ p + µx
r
La definizione di parentesi di Poisson tra due generiche funzioni o osservabili è {f, g} =
∂f ∂g
−
∂xk ∂pk
∂f ∂g
d
.
Si
può
mostrare
che
la
derivata
sostanziale
di
una
funzione
f
(p,
x,
t)
→
f
(p,
x,
t)
=
∂pk ∂xk
dt
df (p,x,t)
∂f ∂f ∂f
∂H
∂H
( ∂x
x
+
p
)
+
,sostituendo
le
eq.
di
Hamilton
x
=
,
p
=
−
si
ottiene
=
k
∂pk k
∂t
∂p
∂x
dt
k
∂f ∂H
∂f ∂H
∂f
∂f
( ∂xk ∂pk − ∂pk ∂xk ) + ∂t = {f, H} + ∂t . Quando l’osservabile in questione non dipende espicitamente
dal tempo ∂f
= 0 , allora la sua parentesi di Poisson con l’Hamiltoniana si annulla se e solo se f è
∂t
d
una quantità conservata dt
f (p, x, t) = 0.
Si è utilizzata la regola di Leibniz {f g, h} = f {g, h} + {f, h} g .
∂f ∂(r −1 )
∂f
p = pk pk e f, r1 = − ∂p
= xr3k ∂p
= xr3k {xk , f }.
∂xk
k
k
15 2
9
1
µxk
1
2
Lij , p − µ Lij ,
= pk {Lij , pk } + 3 {Lij , xk }
{Lij , H} =
2
r
r
µ
= (δik pk pj − δjk pk pi ) + 3 (δik xk xj − δjk xk xi )
r
µ
= (pi pj − pj pi ) + 3 (xi xj − xj xi ) = 0,
r
segue che
{Ri , H} = −Lij {pj , H} + µ
=
=
=
nx
o
i
1
pj ,
r
+ µpk
, H = µLij
r
1
1
µ
Lij xk δjk + µpk (xi
, pk + δik )
3
r
r
r
µ
µ
µ
Lij xj + pi − 3 pk δkm xm xi
r3
r
r
µ
µ
µ
µ
(x · p)xi − pi + pi − 3 (x · p)xi = 0
3
r
r
r
r
nx
i
r
, pk
o
{Ri , H} = 0.
(18)
Una volta verificato che le componenti del Runge-Lenz sono quantità conservate si
effettua il calcolo della parentesi di Poisson del vettore con se stesso:
n
µxj o
µxi
, −Ljm pm +
{Ri , Rj } =
−Lik pk +
r
r
n
n
xj o
xi o
= {Lik pk , Ljm pm } − µ Lik pk ,
+ µ Ljm pm ,
,
r
r
dato che16
{Lik , Ljm } = δmi Ljk + δkm Lij + δij Lkm + δjk Lmi
(19)
il calcolo del primo termine risulta:
{Lik pk , Ljm pm } = Lik {pk , Ljm pm } + {Lik , Ljm pm } pk = Lik Ljm {pk , pm }
+Lik {pk , Ljm } pm + Ljm {Lik , pm } pk + {Lik , Ljm } pk pm
= Lik (δkm pm pj − δjk pm pm ) + Ljm (δmi pk pk − δkm pk pi )
+(δmi Ljk + δkm Lij + δij Lkm + δjk Lmi )pk pm
= Lim pm pj − Lij p2 + Lji p2 − Ljk pk pi
+Ljk pk pi + Lij p2 + δij Lkm pm pk − Lim pm pj
= −Lij p2 + δij Lkm pm pk = −Lij p2 ,
16
{Lik , Ljm } = xi {pj , Llm } + pj {xi , Llm } − xj {pi , Llm } − pi {xj , Llm } = xi (δmj pl − δlj pm ) + pj (δmi xl −
δli xm ) − xj (δmi pl − δli pm ) − pi (δmj xl − δlj xm ) e infine raggruppando le delta di Kronecker si ottiene
δmi Ljk + δkm Lij + δij Lkm + δjk Lmi .
10
poichè Lkm pm pk = xk pk pm pm − xm pm pk pk = p2 (x · p) − p2 (x · p) = 0 , alla fine si ottiene
{Lik pk , Ljm pm } = −Lij p2 .
Il secondo termine di {Ri , Rj }risulta invece:
n
n
xj o
xj o
xj o n
1
1
1
= Lik pk ,
+ Lik ,
pk = Lik ( 3 xk xj − δjk ) + {Lik , xj } pk
Lik pk ,
r
r
r
r
r
r
1
1
1
1
xj pk = 3 Lik xk xj − Lij + (δij xk pk − δjk xi pk )
+ Lik ,
r
r
r
r
1
1
=
(x · p)xi xj + (−xj pi − Lij + δij x · p − xi pj )
r3
r
e
n
xj o
1
1
= 3 (x · p)xi xj + (δij x · p − 2xi pj ),
Lik pk ,
r
r
r
x dato che,
dai calcoli effettuati nella derivazione della (17), si ha pk , rj = r13 xk xj − 1r δjk ,
Lik , 1r = 0 e Lik xk xj = (x · p)xi xj − r2 pi xj .
A questo punto nel calcolo di {Ri , Rj } i termini simmetrici in i, j si elidono
n
xj o
µ
p2 µ
−{i ↔ j}) = −Lij p2 − (−2xi pj +2xj pi )] = −2Lij ( − )
{Ri , Rj } = −Lij p2 −µ( Lik pk ,
r
r
2 r
quindi:
{Ri , Rj } = −2Lij H.
(20)
Per completezza si procede anche con il calcolo della parentesi tra le componenti di R e
di L :
nx
o
nx
o
i
i
{Ri , Llm } = {−Lij pj , Llm } + µ
, Llm = −pj {Lij , Llm } − Lij {pj , Llm } + µ
, Llm
r
r
µ
= −pj (δmi Llj + δjm Lil + δil Ljm + δlj Lmi ) − Lij (δjm pl − δlj pm ) − (δmi xl − δli xm )
r
µ
= −pj (δjm Lil − δlj Lim ) − Lij (δjm pl − δlj pm ) − pj (δmi Llj − δil Lmj ) − (δmi xl − δli xm )
r
µxl
µxm
= −pm Lil + pl Lim − Lim pl + Lil pm − δmi (Llj pj −
) + δli (Lmj pj −
)
r
r
quindi:
{Ri , Llm } = δim Rl − δil Rm
(21)
Infine è utile ricavare il modulo quadro del vettore di Runge-Lenz:
R2 = Ri Ri = (−Lij pj +
µxi 2
2µ
µ2 xi xi
) = Lij Lik pj pk −
Lij xi pj +
r
r
r2
separatamente risulta che Lij xi pj = xi xi pj pj − xi pi xj pj = r2 p2 − x · p e dalla (11) si ha
11
L2 = Lij xi pj mentre
Lij Lik pj pk = (xi xi pj pk − xi pi pj xk − xi pi pk xj + xj xk pi pi )pj pk
= (r2 pj pk − 2x · ppj xk + xj xk p2 )pj pk = r2 pj pj pk pk − 2(x · p)pj pj xk pk
+xj pj xk pk p2 = r2 p4 − 2(x · p)2 p2 − (x · p)2 p2 = p2 (r2 p2 − x · p)
e
Lij Lik pj pk = L2 p2 ,
in definitiva Lij Lik pj pk −
2µ
r Lij xi pj
+
µ2 xi xi
r2
= L2 p 2 −
2µ 2
r L
2
+ µ2 = 2L2 ( p2 − µr ) quindi:
(22)
R2 = µ2 + 2HL2 .
Il passo successivo consiste nel costruire un nuovo vettore di Runge -Lenz normalizzato, per mostrare che l’algebra delle parentesi di Poisson delle componenti del momento
angolare Lij e del Runge-Lenz normalizzato Mi abbia effettivamente la struttura di un’algebra di Lie per il gruppo ortogonale speciale SO(N + 1). Si può facilmente verificare
che, definendo17
1
M = (−2H)− /2 R
(23)
la (19), (20) e (21) si riscrivono nella seguente maniera18 :
{Mi , H} = 0
(24)
{Mi , Mj } = Lij
(25)
{Mi , Llm } = δim Ml − δil Mm
(26)
Dall’analisi delle equazioni (19), (25) e (26) si vede chiaramente che le parentesi di Poisson fra i generatori dell’algebra Lij e Mi sono combinazioni lineari dei generatori stessi
(legge di composizione), si ottiene quindi una struttura algebrica di Lie per il gruppo di
simmetria SO(N + 1).
In un algebra di Lie, si può definire un operatore, detto invariante di Casimir19 ,che
commuta con tutti gli elementi dell’algebra:
(27)
C = L2 + M2 ,
quest’ultima relazione, con la (22) e la (23), permette una riscrittura dell’Hamiltoniana
Per sistemi non legati (es. orbite non limitate) con E > 0 si definisce M = (2H)− /2 R.
L’Hamiltoniana commuta con tutti i generatori dell’algebra quindi, nel calcolo delle parentesi, il fattore
1
(−2H)− /2 altro non è che una costante moltiplicativa.
19
La realizzazione dei generatori del gruppo SO(N + 1), ad opera delle variabili dinamiche Lij ed Mi ,
ha un unico operatore di Casimir indipendente, poichè queste variabili soddisfano relazioni del tipo:
Lij Mk + Ljk Mi + Lki Mj = 0 ; che vista in uno spazio tridimensionale equivale alla relazione di
ortogonalità dei vettori L ed M → L · M = 0.
17
1
18
12
in termini del Casimir del gruppo di simmetria in questione:
H=−
1 µ2
2C
(28)
In geometria sferica: La generalizzazione del problema sopra discusso, in uno spazio
curvo sferico, si realizza considerando, al posto del termine20 Lij pj che, in un moto
libero di particella V (r) = 0 , è una quantità conservata21 , un termine Lij πj , dove π
è un vettore conservato nel moto libero sulla sfera→ {πi , Hlibera } = 0, che sostituisce
il “vecchio impulso” p, conservato nel moto libero in uno spazio piatto. Questo vettore
viene definito nel seguente modo:
π ≡ p + λx(x · p)
(29)
e le sue componenti sono proporzionali ai corrispondenti generatori del gruppo geometrico di simmetria SO(N + 1), ovvero le componenti del momento angolare nello spazio
ambiente22 quindi:
1
πi = λ− /2 L0i .
(30)
Operando la sostituzione (29) le componenti del momento angolare rimangono invariate
Lij ≡ xi πj − xj πi = xi pj − xj pi + λ(xi xj x · p − xj xi x · p) = xi pj − xj pi ,
mentre il vettore di Runge-Lenz risulta:
Ri = −Lij πj +
µxi
r
(31)
e le seguenti generalizzazioni della (20) e della (22):
∗ {Ri , Rj } = (−2H + 2λL2 )Lij
(32)
∗R2 = µ2 + 2HL2 − λL4 .
(33)
La (18) e la (21), tenendo conto della (9), rimangono invece immutate ∗ {Ri , H} = 0 e
{Ri , Llm } = δim Rl + δil Rm .
Una forma alternativa per l’Hamiltoniana nel caso piatto, può essere la seguente:
1
H(p, x) = (1 + λr2 )[p2 (1 + λr2 ) − λL2 ] + V (r),
2
Costruito a partire dai generatori Lij e pj del gruppo Euclideo E(N ).
È la componente i-esima del vettore di Runge-Lenz stesso.
22
Si ricorda che lo spazio Euclideo in cui è immersa la sfera è a N+1 dimensioni, descritto dalle seguenti
coordinate cartesiane {q0 , qi }i=1,...,N , quindi L0i non è altro che la componente del momento angolare
lungo q0 .
20
21
13
o in maniera equivalente, considerato che
π 2 = [p + λx(x · p)]2 = p2 + λr2 (x · p)2 + 2λ(x · p)2 = p2 + λ(2 + λr2 )(x · p)2 ,
che con la (10) risulta
π 2 = p2 (1 + λr2 )2 − λL2 (2 + λr2 ) = (1 + λr2 )[p2 (1 + λr2 ) − λL2 ] − λL2
si ha:
µ
1
(34)
H(p, x) = (π 2 + λL2 ) − ;
2
r
così che in un moto libero l’Hamiltoniana risulta proporzionale all’operatore quadratico
di Casimir23 del gruppo geometrico di simmetria SO(N + 1).
Nel caso curvo la costruzione del vettore di Runge-Lenz normalizzato M è però più
complicata, in quanto nella (32) compare un termine proporzionale ad L2 che, al contrario
di H, non commuta con Ri . Il fatto che M debba essere una costante del moto sotto il
gruppo SO(N ) implica che sia proprorzionale ad R tramite una funzione arbitraria di
tutte le quantità conservate del sistema, ovvero
(35)
M(L2 , H) ≡ Rf (L2 , H);
la parentesi di Poisson tra le sue componenti risulta:
{Mi , Mj } = {f Ri , f Rj } = f 2 {Ri , Rj } + f Rj {Ri , f } + f Ri {f, Rj } + Ri Rj {f, f }
∂R2
= −Lij f 2
+ f (Rj {Ri , f } + Ri {f, Rj }),
∂L2
dove si è utilizzato il fatto che, dal confronto della (32) e della (33), si ha {Ri , Rj } =
2
−Lij ∂R
. Il calcolo separato del termine {Ri , f }, dove bisogna tener conto che f ≡
∂L2
∂f f (L2 , H) è funzione dell’energia e del quadrato del momento24 , risulta {Ri , f } = ∂L
Ri , L2 +
2
∂f ∂f
2 dove
∂H {Ri , H} che con la (18) diventa {Ri , f } = ∂L2 Ri , L
Ri , L2 = {Ri , Llm } Llm = (δim Rl + δil Rm )Llm = −(Lil Rl + Lim Rm ) = −2Lik Rk .
∂f
Se quindi {Ri , f } = −2 ∂L
2 Lik Rk allora
Rj {Ri , f } + Ri {f, Rj } =
23
24
∂f
∂f
(−2Lik Rk Rj + 2Ljk Rk Ri ) = 2 2 Rk (Lki Rj + Ljk Ri )
2
∂L
∂L
Per la (30) 21 (π 2 + λL2 ) == 12 λ(L0i L0i + L2 ) ∝ (L0i L0i + L2 ).
In generale se si deve calcolare {f, g} dove g ≡ g(h, w) è funzione di una o più funzioni h ≡ h(x, p) e
∂f ∂g(h,w)
w ≡ w(x, p), dipendenti a loro volta dalle coordinate e dagli impulsi si ottiene {f, g} = ∂x
−
∂pk
k
∂f ∂g(h,w)
∂f
∂g ∂w
∂f ∂g ∂h
= ∂x
( ∂g ∂h + ∂w
) − ∂p
(
∂pk
∂xk
∂pk
k ∂h ∂pk
k ∂h ∂xk
∂f ∂w
∂g
∂g
)
=
{f,
h}
+
{f,
w}.
∂pk ∂xk
∂h
∂w
∂g ∂w
+ ∂w
)=
∂xk
14
∂g ∂f ∂h
(
∂h ∂xk ∂pk
∂f
− ∂p
k
∂g
∂f ∂w
∂h
) + ∂w
( ∂x
∂xk
k ∂pk
−
e utilizzando la relazione Lij Rk + Ljk Ri + Lki Rj = 0 (vedi nota 19) si ha
Rj {Ri , f } + Ri {f, Rj } = −2Lij
∂f 2
R .
∂L2
A questo punto il calcolo della parentesi fra le componenti di M si semplifica notevolmente, segue che
2
∂f 2
∂f
∂R2
2 ∂R
−
2L
f
R
=
−L
(f
+ 2f 2 R2 )
ij
ij
∂L2
∂L2
∂L2
∂L
∂(f 2 R2 )
∂M2
= −Lij
=
−L
ij
∂L2
∂L2
{Mi , Mj } = −Lij f 2
infine:
∂
M2 (L2 , H).
(36)
∂L2
Data la forma della (36), se si considera il Casimir dell’algebra come una funzione
arbitraria dell’Hamiltoniana, ovvero
{Mi , Mj } = −Lij
C(H) = L2 + M2
(37)
allora si riottiene proprio la (22). Ora M, come del resto R, deve essere ben definito per
ogni tipologia di orbita e , nel caso particolare di orbita circolare, si deve annullare. Ad
esempio in un’orbita nello spazio Euclideo ordinario definita da R = L∧p+ µx
r in cui R =
2 +µr si annulla; di conseguenza
0 la quantità x·R = x·(L∧p)+ µx·x
=
(x∧p)·L+µr
=
L
r
2
r = − Lµ ovvero il raggio dell’orbita è costante e si ha moto circolare. Al contrario se
l’orbita è circolare p ⊥ x quindi (p ∧ L) x e in modulo |R| = |p| |L| − µ|x|
r = Lp − µ ;
inoltre in un moto cirolare il raggio orbitale non dipende dall’angolo di rotazione quindi
dr
2
2
2
dθ = 0 → E = Vef f (r) o equivalentemente L = 2r (E − V ) ,che con p = 2(E − V ),
permette di scrivere Lp = 2r(E − V ). Infine il teorema del viriale assicura che in un
moto centrale in presenza di un potenziale V (r) proporzionale all’inverso della distanza
(Kepleriano) si ha 2 hT i = − hV (r)i, dove hT i è il valor medio dell’energia cinetica; con
p ed r costanti (moto circolare) i valori medi scompaiono e diventa 2T = −V (r) ,quindi
si ottiene Lp = −rV (r) = µ e il valore assoluto del Runge-Lenz si annulla.
Da notare come, per una scelta particolare della forma dell’orbita (circolare→ M2 =
0), il modulo quadro del momento angolare per la (37) diventi L2 = C(E), ovvero il
Casimir dell’algebra nonchè una funzione esplicita dell’energia totale del sistema25 . La
soluzione alla (37), ovvero l’espressione dell’Hamiltoniana in termini dell’invarante di
Casimir, si può quindi ricavare, in maniera del tutto generale e valida per tutte le orbite,
considerando il caso più semplice di orbita chiusa, quella circolare, in cui l’annullamento
25
Per ricavare la forma esplicita di C(E) = L2 basta risolvere, rispetto alla stessa variabile, un’equazione
2
di secondo grado che si ottiene ponendo R2 = 0 nella (33), quindi C 2 − 2H
C − µλ = 0 e la soluzione
λ
1
è C(E) = λ−1 [E + (E 2 + λµ2 ) /2 ].
15
del Runge-Lenz permette di riscrivere la (33) nel seguente modo:
da cui
µ2 + 2HC − λC 2 = 0
(38)
1
1
H = λC − µ2 C −1
2
2
(39)
2.4.2 Problema dell’oscillatore armonico
In assenza di curvatura: In uno spazio Euclideo le componenti cartesiane del tensore
simmetrico del secondo ordine (tensore di Fradkin) complanare con l’orbita e con gli stessi
assi principali viene definito nel seguente modo:
Sij ≡ pi pj + ω 2 xi xj
(40)
Si procede quindi con la costruzione dell’algebra delle parentesi di Poisson delle costanti
del moto calcolando, innazitutto, la sua parentesi con l’Hamiltoniana dell’oscillatore,
ovvero dato che
1
(41)
H(p, x) = (p2 + ω 2 r2 )
2
si ha:
{Sij , H} = pi {pj , H} + {pi , H} pj + ω 2 (xi {xj , H} + {xi , H} xj ).
2
Si calcolano quindi le parentesi {pi , H} = ω2 {pi , xk xk } = ω 2 xk {pi , xk } = −ω 2 xk δik =
−ω 2 xi e {xi , H} = pk δik = pi ; da cui risulta che{Sij , H} = −ω 2 (pi xj + pj xi ) + ω 2 (xi pj +
pi xj ), di conseguenza:
∗ {Sij , H} = 0.
(42)
La parentesi tra le sue componenti risulta invece
{Sij , Skl } = pi {pj , Skl } + {pi , Skl } pj + ω 2 (xi {xj , Skl } + {xi , Skl } xj )
e separatamente si calcola {pi , Skl } = ω 2 {pi , xk xl } = ω 2 (xk {pi , xl } + {pi , xk } xl ) =
−ω 2 (δil xk + δik xl ) e {xi , Skl } = δjl pk + δjk pl ; da cui
{Sij , Skl } = −ω 2 pi (δjl xk + δjk xl ) − ω 2 (δil xk + δik xl )pj
+ω 2 xi (δjl pk + δjk pl ) + ω 2 xj (δil pk + δik pl )
= ω 2 [δjl (xi pk − xk pi ) + δjk (xi pl − xl pi ) + δil (xj pk − xk pj ) + δik (xj pl − xl pj )]
ossia:
∗ {Sij , Skl } = ω 2 (Lik δjl + Lil δjk + Ljk δil + Ljl δik ).
(43)
Chiaramente Sij è una matrice di rango 2, perciò possono essere costruite solo due
quantità scalari conservate e fra loro indipendenti:
I1 = T r(S) = 2H
16
(44)
dove T r(S) = Sii = pi pi + ω 2 xi xi = p2 + ω 2 r2 quindi la (44) si può riscrivere comela
seconda quantità scalare è:
I2 = T r(S2 ) − T r2 (S) = −2ω 2 L2 ,
(45)
dove
T r(S2 ) − T r2 (S) = Sij Sji − Sii Sjj = (pi pj + ω 2 xi xj )(pj pi + ω 2 xj xi )
−(pi pi + ω 2 xi xi )(pj pj + ω 2 xj xj )
= −2ω 2 (xi xi pj pj − xi pi xj pj ) = −2ω 2 [r2 p2 − (x · p)2 ]
che con la (11) diventa −2ω 2 L2 .
La struttura algebrica definita dalla (43) è proprio quella del gruppo di simmetria
dinamico SU (N ) nello spazio Euclideo, i cui generatori sono le componenti del tensore
momento angolare Lij ed di un tensore simmetrico Nij a traccia nulla (normalizza il
Fradkin) definito in modo tale che la (42) e la (43) diventino
{Nij , H} = 0.
(46)
{Nij , Nkl } = Lik δjl + Lil δjk + Ljk δil + Ljl δik
(47)
Definendo Nij nella seguente maniera:
Nij = ω −1 (Sij −
1
Skk δij )
N
(48)
dove N è il numero di dimensioni dello spazio in cui l’oscillatore è immerso (i = 1, ...., N );
si può facilmente verificare che
T r(N ) = Nii = ω −1 (Sii −
1
1
T r(S)δii ) = ω −1 (T r(S) − T r(S)N ) = 0
N
N
è inoltre chiaro che la (46) e la (47) siano verificate in quanto nel calcolo delle parentesi
il termine N −1 T r(S)δij = 2N −1 Hδij ∝ H commuta con H e con Sij .
Ora si vuole calcolare la traccia del tensore Nij al quadrato , dove T r(N2 ) = Nij Nji e
le equazioni (44) e (45) portano al seguente risultato:
Nij Nji = ω −2 (Sij Sji − 2N −1 Skk Sij δij + N −2 Skk Smm δij δij )
= ω −2 (T r(S2 ) − 2N −1 T r(S)Sij δij + N −2 T r2 (S)δij δij )
quindi per la (45) e dato che Sij δij = T r(S) e δij δij = N si ha
Nij Nji = ω −2 (−2ω 2 L2 + T r2 (S) − 2N −1 T r2 (S) + N −2 N T r2 (S)),
17
quindi
ω −2 [−2ω 2 L2 + (1 − 2N −1 + N −1 )T r2 (S)] = [−2L2 + ω −2 (1 − N −1 )T r2 (S)]
da cui si deduce l’espressione finale:
T r(N2 ) = −2L2 +
4(1 − N −1 ) 2
H
ω2
(49)
questa grandezza rappresenta l’unico scalare indipendente costruibile a partire da Nij .
Solo a questo punto si può esprimere l’Hamiltoniana come funzione del Casimir dell’algebra26
1
H = ωC /2
(50)
dove dalla (49) si ha
Nij Nij + Lij Lij =
4(1 − N −1 ) 2
H ≡ 4(1 − N −1 )C(H).
ω2
(51)
Il Casimir quadratico dell’algebra del gruppo SU (N ) deve infatti essere proporzionale ai
generatori quadratici del gruppo stesso:
C(H) ∝ T r(N2 ) + 2L2 .
In geometria sferica: Sulla sfera si procede sempre nella solita maniera, tutto ciò che, in
presenza di curvatura, è necessario fare per costruire le corrispondenti costanti del moto
è sostituire all’impulso p conservato nel moto libero sul piano, l’impulso π conservato nel
moto libero sulla sfera stessa; quindi il tensore di Fradkin assume la seguente forma:
Sij ≡ πi πj + ω 2 xi xj
(52)
di conseguenza con πi πj = pi pj + λx · p(xi pj + xj pi ) + λ2 (x · p)2 xi xj , la parentesi (43)
diventa
∗ {Sij , Skl } = ω 2 (Lik δjl + Lil δjk + Ljk δil + Ljl δik )
(53)
+λ(Lik Sjl + Lil Sjk + Ljk Sil + Ljl Sik ),
mentre la parentesi con l’hamiltoniana è sempre nulla ∗ {Sij , H} = 0.
Gli scalari calcolati nel caso precedente assumono la seguente forma
T r(S) = πi πi + ω 2 xi xi = π 2 + ω 2 r2
26
Anche in questo caso la realizzazione dei generatori del gruppo SU (N ), ad opera delle variabili dinamiche Lij ed Nij , ha un unico operatore di Casimir indipendente, poichè queste variabili soddisfano
relazioni del tipo Lik Njl + Lil Njk + Ljk Nil + Ljl Nik = 0.
18
quindi
I1 = 2H − λL2
(54)
mentre la (45) si riscrive I2 = T r(S2 ) − T r2 (S) = −2ω 2 [r2 π 2 − (x · π)2 ] dove27
r2 π 2 − (x · π)2 = L2
(55)
e la (45) rimane immutata.
Per quanto riguarda la costruzione di Nij (tensore simmetrico a traccia nulla) nel caso
sferico, si va incontro a problemi non banali dovuti alla non-linearità dell’espressione
(53). Si può tuttavia aggirare tale difficoltà utilizzando un procedura simile a quella
adottata nel problema di Keplero, dato che Sij è un tensore di rango 2, la forma più
generale possibile per un tensore che abbia gli stessi assi principali e che allo stesso
tempo preservi il numero di righe (o colonne) linearmente indipendenti (rango) risulta:
Tij = f (L2 , H)Sij + g(L2 , H)(Sim Smj − Smm Sij )
(56)
o in modo equivalente dato che
Sim Smj − Smm Sij
= (πi πm + ω 2 xi xm )(πj πm + ω 2 xj xm ) − T r(S)(πi πj + ω 2 xi xj )
= π 2 πi πj + ω 4 r2 xi xj + ω 2 (x · π)(πi xj + πj xi ) − (π 2 + ω 2 r2 )(πi πj + ω 2 xi xj )
= ω 2 xm πm (πi xj + πj xi ) − ω 2 (π 2 xi xj + r2 πi πj )
= ω 2 [xi πm (xm πj − xj πm ) − xm πi (xm πj − xj πm )]
= ω 2 (xi πm − xm πi )(xm πj − xj πm ) = ω 2 Lim Lmj ,
infine
e la (56) si può riscrivere
Sim Smj − Smm Sij = ω 2 Lim Lmj
(57)
Tij = f Sij + gω 2 Lim Lmj .
(58)
Essendo Tij , come già detto, una matrice di rango 2 le due quantità scalari indipendenti
risultano
J1 = T r(T) = f I1 + gI2
(59)
poichè T r(T) = Tii = f Sii + gω 2 Lim Lmi = f T r(S) − 2gω 2 L2 . La seconda quantità
risulta invece
1
J2 = T r(T2 ) − T r2 (T) = (f 2 − f gI1 − g 2 I2 )I2 .
(60)
2
In effetti T r(T2 ) − T r2 (T) = Tij Tji − Tii Tjj = Tij Tji − (f I1 + gI2 )2 con Tij Tji =
27
Si è già visto che la definizione di momento angolare non varia rispetto alla sostituzione del “vecchio”
con il “nuovo” impulso π, conseguentemente anche il suo modulo quadro rimane immutato, infatti
r2 π 2 − (x · π)2 = r2 p2 + 2λr2 (x · p)2 + λ2 r4 (x · p)2 − (1 + λr2 )2 (x · p)2 = r2 p2 − (x · p)2 [(1 + λr2 )2 −
2λr2 − λ2 r4 ] = r2 p2 − (x · p)2 = L2 .
19
f 2 Sij Sij + 2f gω 2 Sij Lim Lmj + g 2 ω 4 Lim Lmj Lik Lkj e separatamente risulta dalla (45) che
(61)
Sij Sij = T r(S2 ) = I2 + I12
mentre dal calcolo effettuato per la (57) si ha che
Sij Lim Lmj
= Sij [(x · π)(πi xj + πj xi ) − (π 2 xi xj + r2 πi πj )]
= (πi πj + ω 2 xi xj )[(x · π)(πi xj + πj xi ) − (π 2 xi xj + r2 πi πj )]
= 2(x · π)(πi πi xj πj + ω 2 xi xi xj πj )
−(π 2 πi xi πj xj + r2 πi πi πj πj + ω 2 π 2 xi xi xj xj + ω 2 r2 πi xi πj xj )
= 2(x · π)2 (π 2 + ω 2 r2 ) − [(x · π)2 (π 2 + ω 2 r2 ) + π 2 r2 (π 2 + ω 2 r2 )]
= (x · π)2 (π 2 + ω 2 r2 ) − π 2 r2 (π 2 + ω 2 r2 ) = −[r2 π 2 − (x · π)2 ](π 2 + ω 2 r2 ) = −I1 L2
quindi
(62)
2ω 2 Sij Lim Lmj = −2ω 2 L2 I1 = I2 I1 .
L’ultimo termine viene invece calcolato nel seguente modo
Lim Lmj Lik Lkj
= [(x · π)(πi xj + πj xi ) − (π 2 xi xj + r2 πi πj )]2
= 2(x · π)2 (π 2 r2 + (x · π)2 ) − 8(x · π)2 π 2 r2
+(π 4 r4 + 2(x · π)2 π 2 r2 + r4 π 4 )
= 2(x · π)4 − 4(x · π)2 π 2 r2 + 2π 4 r4 = 2[r2 π 2 − (x · π)2 ]2 = 2L4
e ora il terzo risulta proporziale ad (I2 )2 infatti
1
ω 4 Lim Lmj Lik Lkj = 2ω 4 L4 = (I2 )2
2
(63)
a questo punto la (61),(62) e (63) portano al seguente risultato:
1
1
Tij Tji − Tii Tjj = f 2 (I2 + I12 ) + f gI2 I1 + g 2 (I2 )2 − (f I1 + gI2 )2 = (f 2 − f gI1 − g 2 I2 )I2
2
2
che è la verifica della (61).
Le parentesi di Poisson tra le componenti di questo nuovo tensore definito nella (56)
sono:
{Tij , Tkl } = Lik Ujl + Lil Ujk + Ljk Uil + Ljl Uik
(64)
dove
2 J2
∂J1
∂
Uij = δij ω
− Tij 2 − Lim Lmj ω 2 2
I2
∂L
∂L
J2
I2
.
(65)
Perchè la parentesi appena calcolata assuma la forma della parentesi (47) basta definire
Nij come lo si è fatto, in assenza di curvatura, nella (48), con l’unica accortezza di
20
sostituire ad Sij il tensore Tij quindi
Nij = Tij −
1
Tkk δij
N
(66)
inoltre si devono scegliere le funzioni f (L2 , H) e g(L2 , H) , definite nella (56), in modo
tale che
J1 = Γ(H)
(67)
(68)
J2 = −2L2
dove Γ(H) è una funzione arbitraria dell’Hamiltoniana; ora le quantità J1 e
sono
costanti e le derivate nella (65) si annullano28 .
Allora, con la stessa procedura eseguita nel caso piatto29 , si ricava la corrispettiva
espressione della (49) in cui viene definito l’operatore quadratico di Casimir per il gruppo
SU (N ):
Nij Nij + Lij Lij ≡ 4(1 − N −1 )C(H)
J2
I2
ma a differenza del caso Euclideo, poichè J1 = T r(T) = Γ(H), si ha
1
C(H) = Γ2 (H).
4
(69)
Ancora una volta (vedi problema di Keplero) la forma della funzione Γ(H) viene determinata considerando orbite circolari, che in un potenziale di oscillatore armonico sono
caratterizzate dalla degenerazione degli unici due autovalori non nulli della matrice30 Sij .
Si considera ora l’equazione secolare di tale matrice, che avendo solo due autovalori non
nulli si può scrivere nella semplice forma
γ 2 − T r(S)γ + det(S) = 0
(70)
ma, in condizione di circolarità dell’orbita essendo i due autovalori degeneri γ = γ1 = γ2
, si ha det(S) = γ 2 e T r(S) = 2γ quindi si può scrivere31
γ 2 − 2γ 2 + γ 2 = 4γ 2 + 2(2γ 2 − 4γ 2 ) = T r2 (S) + 2[T r(S2 ) − T r2 (S)] = I1 + 2I2
In realtà, per completare il quadro, bisognerebbe far vedere che {Lij , Nkl } = Nik δjl + Nil δjk − Njk δil −
Njl δik ; ma data la definizione (66), poichè {Lij , Tkk δij } = {Lij , T r(T)} = {Lij , Γ(H)} = 0 si nota
che {Lij , Nkl } = {Lij , Tkl } = f {Lij , Skl } + gω 2 {Lij , Lkm Lml }; poi utilizzando la (19) e sfruttando
la relazione tra i generatori dell’algebra SU (N ) per cui {Lij , Skl } = Sik δjl + Sil δjk − Sjk δil − Sjl δik
si ottiene il risultato sperato.
2
−1
Tkk Tij δij Nij Nij = +N −2 Tkk Tmm δij δij =
29 T r(N ) = Nij Nji = Tij Tji − 2N
2
−1
−2
T r(T ) − 2N T r(T)Sij δij + N T r2 (T)δij δij = J2 + (1 − N −1 )(J1 )2 .
30
Si ricorda che tale matrice ha rango=2, quindi nella sua forma diagonale avrà soltanto due autovalori
non nulli.
2
γ 0
γ
0
31
2
Infatti in forma diagonale a blocchi, l’unico blocco non nullo è
quindi S =
e
0 γ
0 γ2
2
2
T r(S ) = 2γ .
28
21
la circolarità dell’orbita implica quindi che sia verificata:
o in forma esplicita
(I1 )2 + 2I2 = 0
(71)
1
1
E = λL2 + ω(L2 ) /2 .
2
(72)
La stessa condizione di degenerazione vale anche per Tij
32 :
(J1 )2 + 2J2 = 0
(73)
e in forma esplicita
1 2
Γ (E) = L2 .
(74)
4
Confrontando la (69), (72) e la (74) si determina Γ(E) e, in maniera del tutto generale e valida per ogni orbita, la forma esplicita dell’Hamiltoniana del sistema in termini
dell’invariante di Casimir :
1
1
H = λC + ωC /2 .
(75)
2
3 Meccanica Quantistica sulla sfera
L’Hamiltoniana di particella libera H0 ,in meccanica quantistica, viene ottenuta sostituendo all’invariante di Casimir “classico” del gruppo di simmetria SO(N + 1) la sua
controparte quantistica. Inoltre la richiesta di simmetria dell’Hamiltoniana rimuove qualsiasi ambiguità riguardante l’ordine, a parte termini additivi costanti nell’espressione di
H0 che però risultano quantità non-osservabili. Quindi
1
H0 = (π 2 + λL2 )
2
dove al posto della definizione classica di π (29) viene sostituita la sua controparte
hermitiana (simmetrizzazione)33 :
1
π ≡ p + λ[x(x · p) + (p · x)x].
2
(76)
3.1 Problema di Keplero
Ora si verifica che, l’Hamiltoniana quantistica appena ridefinita, con l’aggiunta di un
potenziale Kepleriano V (r) hermitiano, commuta con tutte le componenti della controparte autoaggiunta del vettore di Runge-Lenz; ottenuta sostituendo alla definizione
32
33
Tij matrice simmetrica di rango 2.
In meccanica quantistica dato un operatore A ,in generale non hermitiano, esso può essere facilmen†
te simmetrizzato definendo la quantità A+A
che, per definizione, è un operatore hermitiano (o
2
autoaggiunto).
22
classica di π quella quantistica (76) e simmetrizzando il tutto, così da rendere hermitiane
le componenti di tale vettore 34 . Quindi
µxi
1
Ri = − (Lij πj − πj Lji ) +
2
r
(77)
∗[Ri , H] = 0.
(78)
e la (18) diventa
In meccanica quantistica quindi, l’algebra delle parentesi di Poisson viene rimpiazzata
dall’algebra dei commutatori; data però la relazione esistente tra le due operazioni35
{A, B} = − ~i [A, B] (relazione di grande utilità nel passaggio da un formalismo all’altro),
uno sarebbe portato a scrivere la (32) nel seguente modo
[Ri , Rj ] = ıLij (−2H + 2λL2 )
ma se si effettua il calcolo esplicito si nota che, per N 6= 3 ,compare un termine aggiuntivo
proporzionale ad Lij , al parametro di curvaturaλ e al numero di dimensioni dello spazio,
si ha quindi che
1
(79)
∗[Ri , Rj ] = ıLij [−2H + λ(2L2 + (N − 3)2 )]
4
mentre il modulo quadro di R dalla (33) risulta
1
∗R2 = µ2 + (2H − λL2 )[L2 + (N − 1)2 ] − λL2 .
4
(80)
A questo punto così come a partire dalla (32) e (33) si riusciva a scrivere l’Hamiltoniana
in termini del Casimir dell’algebra SO(N + 1), dalla (79) e (80) si ottiene un risultato
simile (vedi Leemon[2] ) ,ma con la presenza di un termine inversamente proporzionale al
quadrato del numero di dimensioni dello spazio ambiente:
1
1
1
H = λC − µ2 [C + (N + 1)2 ]−1 .
2
2
4
(81)
3.1.1 Risoluzione dello spettro
In questo lavoro, la relazione (81), viene ricavata solamente nel caso fisico di maggiore
interesse N = 3 in cui l’algebra possiede una struttura piuttosto semplice; il procedimento risulta in ogni caso molto istruttivo ed illustra un metodo operatoriale efficace
(basato sulla teoria della rappresentazione matriciale) per ricavare lo spettro degli autovalori dell’Hamiltoniana36 in presenza di un potenziale Kepleriano o armonico, oltre che
Per la seguente proprietà sull’aggiunto del prodotto fra due o più operatori (A1 A2 ....AN )† =
A†N A†N −1 ....A†1 si ha che (Lij πj )† = πj† L†ij = πj Lij = −πj Lji , infatti per la (76) π = π † e per
la (10) L = L† con L tensore antisimmetrico.
35
Nella restante parte della trattazione si è posto ~ = 1.
36
È possibile ricavare lo spettro dell’Hamiltoniana anche per un numero arbitrario di dimensioni; utilizzando però le tecniche standard della teoria dei gruppi, per N > 2, si va incontro a serie difficoltà
associate all’ordine degli operatori non-commutanti. Si può procedere, tuttavia, utilizzando un meto-
34
23
mostrare la degenerazione dei livelli energetici rispetto agli autovalori del momento angolare. Per prima cosa quando si lavora con gli autostati del momento angolare risulta
sempre conveniente utilizzare un sistema di coordinate sferiche; questo per evidenti ragioni di simmetria, difatti il momento angolare è il generatore delle rotazioni spaziali in
R3 , trasformazioni completamente descrivibili ad esempio tramite l’introduzione di due
coordinate angolari indipendenti. Si procede quindi con lo scrivere le componenti del
vettore di Runge-Lenz (generatore delle rotazioni in R4 ) in coordinate sferiche, definite
rispetto alle sue componenti Cartesiane:
R0 = R3
1
R± = ∓ √ (R1 ± ıR2 )
2
dove R± sono operatori a scala (innalzamento e abbassamento), definiti in modo che
(R+ )† = −R− con le seguenti relazioni inverse37 R2 = − √12 (R+ +R− ) e R1 = − √12 (R+ −
R− ). Gli stati di base per gli elementi di matrice degli operatori |E, l, mi, sono gli autostati delle quantità conservate del sistema H, L2 ed L0 . Tali elementi possono però
essere separati (teorema di Wigner-Eckart38 ) in un coefficente contenente solamente la
dipendenza dal numero quantico m, ed una matrice ridotta la cui rappresentazione è nella
base degli autostati di H ed L2 . Nel seguito verrà quindi risolta l’algebra degli elementi
della matrice ridotta, utilizzando le regole di commutazione ricavate in precedenza (78)
,(79) e la relazione di ortogonalità tra i generatori dell’algebra εijk Lij Rk = 0 (il vettore di
Runge-Lenz giace sul piano dell’orbita e quindi è sempre ortogonale al moemento angolare). L’equazione (79) e la relazione di ortogonalità possono essere riscritte in coordinate
sferiche dando luogo a sole due relazioni indipendenti (riduzione della matrice). Dato
che
1
R+ R− = − (R12 + R22 − ı[R1 , R2 ])
2
1
R− R+ = − (R12 + R22 + ı[R1 , R2 ])
2
si ha39
o equivalentemente
[R+ , R− ] = ı[R1 , R2 ] = −L12 (−2H + 2λL2 )
[R− , R+ ] = (−2H + 2λL2 )L0 .
(82)
do sostanzialmente equivalente a quello adottato da Schrödinger[3] , dove veniva discusso il problema
di keplero sulla 3-sfera; tale metodologia è ben illustrata nel lavoro di H.I.Leemon[2] .
37
Ogni volta che si definiscono operatori a scala A± = A1 ± ıA2 , si ha che (A± )† = A∓ e le relazioni
A −A
A −A
inverse sono A1 = + 2 − e A2 = + 2ı − .
38
Per una trattazione esauriente sul metodo di riduzione matriciale, con dimostrazione del seguente
teorema vedi A.R.Edmonds[8] o J.J.Sakurai[9] .
39
R+ R− + R− R+ = −(R12 + R22 ) = (R0 )2 − R2 , dove R2 = µ2 + 2H(L2 + 1) − λL2 (L2 + 2)
24
La relazione di ortogonalità risulta invece
εijk Lij Rk = L12 R3 + L23 R1 + L31 R2 = L1 R1 + L2 R2 + L3 R3 = L · R = 0,
aggiungendo e sottraendo le quantità 2ı L23 R2 e 2ı L31 R1 si ottiene
L3 R3 + 21 L1 (R1 + ıR2 ) + 12 L1 (R1 − ıR2 ) + 12 L2 (ıR1 + R2 ) + 21 L2 (−ıR1 + R2 ) =
L3 R3 + 12 L1 (R1 + ıR2 ) + 12 L1 (R1 − ıR2 ) + 2ı L2 (R1 − ıR2 ) − 2ı L2 (R1 + ıR2 ) =
L3 R3 + 12 (L1 − ıL2 )(R1 + ıR2 ) + 12 (L1 + ıL2 )(R1 − ıR2 )
che, con le seguenti definizioni delle componenti del momento angolare in coordinate
sferiche L3 = L0 e L± = ∓ √12 (L1 ± ıL2 ), diviene
L0 R0 − L− R+ − L+ R− = 0.
(83)
Ora consideriamo separatamente la coppia di equazioni appena ricavate ; la (83) implica
che
(84)
E, l0 R |E, li = 0
se l0 6= l ± 1; mentre dalla (82) si deduce, utilizzando le definizionei dell’Edmonds[8] , che
1
1
|hE, l| R |E, l + 1i|2 − |hE, l − 1| R |E, li|2 = (2l + 1)[2E − 2λl(l + 1)].
l+1
l
(85)
Quest’ultima relazione è un’equazione alle differenze finite40 che, riscritta ponendo x =
l + 1, diviene
f (x) − f (x − 1) = (2x − 1)[2E − 2λx(x − 1)];
dove f (x) ≡ x1 |hE, x − 1| R |E, xi|2 . La soluzione dell’omogenea associata f (x) − f (x −
1) = 0 è, banalmente, una costante arbitraria K; mentre per la soluzione particolare si
propone la seguente forma
f (x) = 2Ex2 − λ(x2 − 1)x2 .
Il termine “forzante” dell’equazione è infatti g(x) = 2E(2x − 1) − λ[4x3 − 6x2 + 2x], è
quindi naturale proporre come soluzione particolare f (x) = 2Ex2 − λP (x), dove P (x) =
ax4 + bx3 + cx2 + dx è un generico polinomio di 4° grado in x. Calcolando f (x) −
f (x − 1) = 2E(2x − 1) − λ[P (x) − P (x − 1)], ed imponendo la seguente condizione41
Le equazioni alle differenze sono l’equivalente, nel discreto, delle equazioni differenziali ordinarie e
vengono trattate sostanzialmente allo stesso modo. Se ora, come nel seguente caso, si è di fronte ad
0
un’equazione alle differenze al 1° ordine non omogenea f (x) = f (x) − f (x − 1) = g(x), il metodo
risolutivo sarà lo stesso che per le edo; ovvero la soluzione generale è la somma della soluzione
dell’equazione omogenea associata e della soluzione particolare f (x) = fo (x) + fp (x).
41
P (x) − P (x − 1) = ax4 + bx3 + cx2 + dx − [a(x − 1)4 + b(x − 1)3 + c(x − 1)2 + d(x − 1)] = ax4 + bx3 +
cx2 + dx − (ax4 − 4ax3 + 6ax2 − 4ax + a + bx3 − 3bx2 + 3bx − b + cx2 − 2cx + c + dx − d) =
40
25
P (x)−P (x−1) = 4x3 −6x2 +2x, si otterrà l’espressione polinomiale di P (x) = (x2 −1)x2 .
La soluzione generale in termini di l è la seguente
1
|hE, l| R |E, l + 1i|2 = K + 2E(l + 1)2 − λl(l + 2)(l + 1)2
l+1
e, valutando l’elemento di matrice di R2 (vedi nota 39), la costante K coincide proprio
con µ2 :
1
|hE, l| R |E, l + 1i|2 = µ2 + 2E(l + 1)2 − λl(l + 2)(l + 1)2 .
(86)
l+1
É importante notare che, per l > 0, il primo membro dell’equazione (86) è sempre
positivo; al contrario al crescere di l vi sarà un momento in cui il secondo termine della
stessa equazione diverrà negativo42 ; ciò sta a significare che vi sarà un valore massimo
possibile lmax per il numero quantico orbitale.
In generale uno stato con un più alto valore di l si può sempre ottenere a partire da
un generico stato|E, l, mi tramite il seguente procedimento:
Rσ |E, l, mi =
X
E, l0 , m + σ E, l0 , m + σ Rσ |E, l, mi
l0
=
X
E, l0 , m + σ Rσ |E, l, mi E, l0 , m + σ ,
l0
dove si è utilizzata la relazione di completezza I =
P
|E, l, m + σi hE, l, m + σ|. Inoltre
l
per la (84), sono diversi da zero solamente i due elementi di matricehE, l ± 1, m + σ| Rσ |E, l, mi,
quindi la sommatoria si estende per l0 = l ± 1:
Rσ |E, l, mi = hE, l + 1, m + σ| Rσ |E, l, mi |E, l + 1, m + σi
(87)
+ hE, l − 1, m + σ| Rσ |E, l, mi |E, l − 1, m + σi ,
se poi esiste un n intero positivo tale che per l = n
hE, n| R |E, n + 1i = 0
nel qual caso la (86) diventa
µ2 + 2E(n + 1)2 − λn(n + 2)(n + 1)2 = 0,
4ax3 − 6ax2 + 4ax − a + 3bx2 − 3bx + b + 2cx − c − dx + d = 4ax3 + (3b − 6a)x2 + (4a − 3b +
2c)x + (b − a + d − c) = 4x3 − 6x2 + 2x; confrontando le due espressioni si ottengono 4 equazioni in
4 incognite: a = 1, 3b − 6a = −6, 4a − 3b + 2c = 2 e b − a + d − c = 0, i coefficenti del polinomio
risultano quindi a = 1, b = 0, c = −1, d = 0 e infine P (x) − P (x − 1) = (x2 − 1)x2 .
42
per l 1, 2E(l + 1)2 ∼ l2 e λl(l + 2)(l + 1)2 ∼ l4 ; quindi ci sarà un lmax per cui se l > lmax allora
µ2 + 2E(l + 1)2 − λl(l + 2)(l + 1)2 < 0 (non ha senso), mentre per l ≤ lmax sarà positiva o al più si
annullerà.
26
o allo stesso modo
En = −
1
µ2
+ λn(n + 2),
2
2(n + 1)
2
(88)
che è lo spettro discreto dell’Hamiltoniana, quindi tutti i livelli di energia del sistema al
variare del numero quantico principale n = 0, 1, 2...., ∞.
Inoltre si verifica che lo spettro appena ricavato coincide, per N = 3, con lo spettro
dell’Hamiltoniana scritta, nella (81), in termini dell’invariante di Casimir del gruppo
SO(N + 1). Infatti, nella rappresentazione irriducibile del gruppo SO(4) gli autovalori
del Casimir43 sono n(n + 2), con n intero positivo quindi la (88) si può riscrivere come
H=−
µ2
1
+ λC,
2(C + 1) 2
(89)
che, nel caso tridimensionale, ha esattamente la stessa forma della (81). Se viceversa si
sostituisce l’espressione di En nella (86), il secondo membro dell’equazione diventa
"
2 #
l
+
1
µ2 1 −
− λ(l + 1)2 [n(n + 2) − l(l + 2)],
n+1
che, chiaramente, sarà nullo44 per l = n; essendo però µ2 + 2E(l + 1)2 − λl(l + 2)(l + 1)2
una funzione decrescente (vedi nota 42) e sempre positiva, allora per ogni n ≥ 0 si ha
n = lmax . In definitiva n = 0, 1, 2...., ∞ e l = 0, ....., n.
A questo punto può rivelarsi utile calcolare gli elementi di matrice di R nella base di
H ed L :
"
2 #
1
l
+
1
|hn, l + 1| R |n, li|2 = µ2 1 −
− λ(l + 1)2 [n(n + 2) − l(l + 2)]
l+1
n+1
n(n + 2) − l(l + 2)
− λ(l + 1)2 [n(n + 2) − l(l + 2)]
= µ2
(n + 1)2
µ2
2
= [n(n + 2) − l(l + 2)]
− λ(l + 1) ,
(n + 1)2
quindi
hn, l + 1| R |n, li = (l + 1) /2 fn,l
1
dove
(90)
µ2
2
|fn,l | = (n − l)(n + l + 2)
− λ(l + 1) .
(n + 1)2
2
Ad esempio nella la base costituita dagli autostati simultanei di H ed L2 −→|E, li ≡ |n, li con cui il
Casimir commuta per definizione, si ha C |n, li = n(n + 2) |n, li con n = 0, 1, 2, ..., ∞. Ora se si fa
agire C + 1 si ottiene (C + 1) |n, li = n(n + 2) + 1 |n, li = (n + 1)2 |n, li.
44
Si ricorda che l’espressione di En è stata ricavata imponendo la condizione hE, n| R |E, n + 1i = 0
43
27
3.1.2 Relazioni di ricorrenza e autofunzioni
In meccanica quantistica ad un generico stato fisico del sistema |ψi, si può sempre associare una funzione d’onda ψ(q) = hq | ψi, che rappresenta la proiezione del generico
stato |ψi su un autostato delle coordinataq (operatore posizione). Si ricorda inoltre che
bastano N componenti indipendenti q ≡ (q1 , .., qi , .., qN ) per descrivere tutti i punti della
N-sfera e quindi il moto di un corpo sulla sua superficie. La condizione di normalizzazione
sulle autofunzioni risulta45
ˆ
hψ | ψi = dqψ ∗ (q)ψ(q) = 1.
Se ora si effettua, in una varietà Riemanniana, una generica trasformazione di coordinate{qi } →
{xi }, l’elemento infinitesimo di volume risulta dq = g 1/2 dx, dove g = |det gij | è il modulo
del determinante del tensore metrico in forma covariante. In particolare effettuando una
proiezione gnomonica definita46 da qi = xi (1 + λr2 )−1/2 , e restringendosi al caso tridimensionale, si possono facilmente calcolare gli elementi di matrice del tensore metrico
gij relativo a tale trasformazione. Ricordando che ds2 = gij dxi dxj con i, j = 1, 2, 3 e
x ≡ (x1 , x2 , x3 ) = (x, y, z) si ha
ds2 = g11 dx2 + g22 dy 2 + g33 dz 2 + 2g12 dxdy + 2g13 dxdz + 2g23 dydz,
che confrontata con la (3) permette di scrivere gij in forma matriciale:
1 + λ(y 2 + z 2 )
−λxy
−λxz
1
;
−λxy
1 + λ(x2 + z 2 )
−λyz
(1 + λr2 )2
2
2
−λxz
−λyz
1 + λ(x + y )
(91)
con determinante* g ≡ g(r) = (1 + λr2 )−4 . La normalizzazione sulle autofunzioni è ora
ˆ
1
hψ | ψi = dxg /2 ψ ∗ (x)ψ(x) = 1.
Rispetto a questa normalizzazione, l’operatore hermitiano impulso, nella rapresentazione
delle nuove coordinate, ha la seguente forma
1
pi = −ıg − 4
∂ 1
g4,
∂xi
(92)
che sostituita alla definizione di Ri , fa si che quest’ultimo divenga un operatore differenziale nelle nelle rappresentazione in coordinate sferiche (χ, θ, ϕ) .
L’utilizzo delle coordinate sferiche porta con sè l’ulteriore vantaggio, dovuto alla particolare simmetria del gruppo SO(3), di poter separare la funzione d’onda totale ψ(x), nel
prodotto di due funzioni d’onda, una radiale e l’altra angolare; definendo la coordinanta
45
46
dq =
Q
dqi
i
La trasformazione avviene ad ogni valore di q0 fissato, in modo che il mapping sia Φ : RN → RN .
28
radiale r i termini dell’angolo χ (vedi s.s 2.3)
tan χ = λ /2 r;
1
la funzione d’onda diventa
|n, l, mi → ψn,l,m (x) = Xn,l (χ)Yl,m (θ, ϕ)
(93)
e la (87) si può riscrivere così
Rσ ψn,l,m (x) = hn, l + 1, m + σ| Rσ |n, l, mi ψn,l+1,m+σ (x)
+ hn, l − 1, m + σ| Rσ |n, l, mi ψn,l−1,m+σ (x).
´
∗ (θ, ϕ)Y
La condizione di ortogonalità per le armoniche sferiche dθdϕYl,m
l,m (θ, ϕ) = 1 e
altre proprietà associate (vedi A. R. Edmonds), possono essere utilizzate per eliminare
la dipendenza angolare dalla precedente equazione, generando relazioni di ricorrenza che
interessano solamente la parte radiale della funzione d’onda, quindi
RXn,l (χ) = hn, l + 1| R |n, li Xn,l+1 (χ) + hn, l − 1| R |n, li Xn,l−1 (χ),
(94)
dove R (vettore di Runge-Lenz) è un operatore differenziale nella coordinata χ. Infine,
una volta scelti in maniera consistente i fattori di fase degli elementi della matrice ridotta, le relazioni di ricorrenza, per un potenziale di tipo Keplero-Coulomb, assumono la
seguente forma
|fn,l |
µ
∂
− l cot χ + 1/2
Xn,l (χ) = − 1/2
Xn,l+1 (χ)
(95)
∂χ
λ (l + 1)
λ (l + 1)
e
|fn,l−1 |
∂
µ
−
− (l + 1) cot χ + 1/2 Xn,l (χ) = − 1/2 Xn,l−1 (χ);
∂χ
λ l
λ l
(96)
le suscritte relazioni sono il punto di partenza per poter ricavare l’espressione della parte
radiale della funzione d’onda. Lo svolgimento, tuttavia, risulta un pò laborioso47 , in ogni
caso il risultato finale del calcolo è
Xn,l (χ) = An,l
dove An,l−1 =
1
β
(2n + 1)!
d
(sin χ)−(n+2) e 2 χ (sin2 χ )n−l [(sin χ)2(l+1) e−βχ ], (97)
(n + l + 1)!
dχ
λ /2
A
2|fn,l−1 | n,l
2µ
;
λ1/2 (n+1)
eβ=
la costante An,n si determina imponendo la
condizione di normalizzazione tra le autofunzioni radiali
ˆ π
2
−3/2
λ
dχ sin2 χXn∗0 ,l Xn,l = δnn0 ,
0
47
Si è posto N = 3 nella relazione generale ricavata da Leemon[2] in N dimensioni.
29
(98)
infatti passando a coordinate sferiche l’elemento di volume, considerando solo la parte
radiale, diventa g 1/2 dx → g 1/2 r2 dr = r2 (1 + λr2 )−2 dr , ma tan χ = λ1/2 r quindi dr =
1
tan2 χ
λ− /2
−3/2 cos2 χ tan2 χ =
dχ e r2 = λ−1 tan2 χ; infine g 1/2 r2 dr = λ−3/2 cos2 χ(1+tan
2 χ)2 = λ
cos2 χ
(cos2 χ+sin2 χ)2
λ−3/2 sin2 χ.
3.2 Oscillatore Armonico
In maniera equivalente l’Hamiltoniana dell’oscillatore risulta
1
H = H0 + ω 2 r 2
2
la quale commuta* con il corrispondente tensore hermitiano di Fradkin, definito nel
seguente modo:
1
Sij ≡ (πi πj + πj πi ) + ω 2 xi xj .
(99)
2
Il commutatore tra le sue componenti risulta invece
1
∗[Sij , Skl ] = ı[(ω 2 − λ2 )(Lik δjl + Lil δjk + Ljk δil + Ljl δik )
4
1
+ λ(Lik Sjl + Lil Sjk + Ljk Sil + Ljl Sik )
2
1
+ λ(Sik Ljl + Sil Ljk + Sjk Lil + Sjl Lik )]
2
(100)
e le quantità scalari48 conservate che si possono costruire a partire dalle sudette relazioni
di commutazione sono
I1 = T r(S) = 2H − λL2
(101)
che è equivalente alla (54) infatti T r(S) = Sii = 21 (πi πi + πi πi ) + ω 2 xi xi = π 2 + ω 2 r2 ; la
seconda quantità assume invece la seguente forma
1
∗I2 = T r(S2 ) − T r2 (S) = −ω 2 [2L2 + N (N − 1)] − λ[2(N − 1)H − (N + )λL2 ], (102)
2
da notare che a differenza del caso classico (45), la nuova quantità ottenuta dipende sia
dal numero di dimensioni dello spazio che dalla curvatura.
Ancora una volta così come dalla (52), (53) e (54) si arrivava a scrivere l’Hamiltoniana
in termini del Casimir dell’algebra SU (N ), ora dalla (99), (100) e (101) si ricava la
seguente espressione per l’Hamiltoniana[2] :
1
1
1
1
1
H = λ(C + N ) + [(ω 2 + λ2 )(C + N 2 )] 2 .
2
2
4
4
48
(103)
I1 e I2 sono in realtà operatori, ma vengono defniti allo stesso modo che nel caso classico dove invece
sono quantità scalari.
30
anch’essa, come nel problema di Keplero, dipendente da un termine proporzionale al
numero di dimensioni dello spazio, ma in maniera lineare.
3.2.1 Risoluzione dello spettro
L’espressione (103) verrà ricavata49 nel seguito considerando il caso in cui N = 2 . La
metodologia adottata è concettualmente molto simile a quella utilizzata nel problema
precedente, ma utianzi il procedimento viene semplificato ulteriormente dal fatto che il
momento angolare ha un’unica componente L = L12 , mentre i tensori simmetrici Sij e
Nij (traccia nulla) ne conservano solamente due. Anche ora queste componenti possono
essere scelte in modo tale da costruire i due corrispondenti operatori di innalzamento
e abbassamento per gli autovalori di L. Per prima cosa il commutatore tra l’operatore
momento angolare ed i due tensori simmetrici a scala è50
[L, S± ] = ±2S±
dove i due operatori in questione sono definiti nel seguente modo51
1
S± = (S11 − S22 ) ± ıS12 .
2
Direttamente dal fatto che [L, S± ] = LS± − S± L = ±2S± , si ha
LS± = S± (L ± 2),
se si fa agire nuovamente l’operatore L , si ottiene
L2 S± = LS± (L ± 2) = S± (L ± 2)2
e iterando il procedimento per un numero arbitrario di volte, si ha che
LN S± = LN −1 S± (L ± 2) = LN −2 S± (L ± 2)2 = ..... = S± (L ± 2)N .
Dall’espressione appena ricavata si evince che, più in generale, per ogni funzione (polinomio di grado N) del momento angolare f (L) si ha
f (L)S± = S± f (L ± 2).
(104)
I prodotti fra i due operatori a scala risultano invece
1
ı
2
S+ S− = (S11 − S22 )2 + S12
− [(S11 − S22 ), S12 ]
4
2
Per la trattazione generale del problema vedi Leemon[2] .
{Lij , Skl } = Sik δjl + Sil δjk − Sjk δil − Sjl δik −→ [Lij , Skl ] = ı(Sik δjl + Sil δjk − Sjk δil − Sjl δik ), con
L = L12 e Skl con k, l = 1, 2.
51
1
Tale che (S+ )† = S− con le seguenti relazioni inverse S11 − S22 = S+ + S− ed S12 = 2ı
(S+ + S− ).
49
50
31
1
ı
2
S− S+ = (S11 − S22 )2 + S12
+ [(S11 − S22 ), S12 ]
4
2
quindi
S+ S− − S− S+ = −ı[(S11 − S22 ), S12 ] = −ı[S11 , S12 ] + ı[S22 , S12 ]
1
1
1 2
2
2
2
(S11 − S22 )2 + 2S12
= (S11
+ S22
) + 2S12
− (S11 S22 + S22 S11 )
2
2
2
1 2
1
1 2
1 2
2
2
2
2
=
(S + S22 ) + 2S12 − (S11 S22 + S22 S11 ) + (S11 + S22
) − (S11
+ S22
)
2 11
2
2
2
1 2
1
2
2
2
2
= (S11
+ S22
+ 2S12
) − (S11
+ S22
+ S11 S22 + S22 S11 ) = T r(S2 ) − T r2 (S)
2
2
S+ S− + S− S+ =
infine
1
S+ S− + S− S+ = I2 + (I1 )2
2
che con la (100), (101) e (102) diventano
1
1
(S+ S− − S− S+ ) = L[2(ω 2 − λ2 ) + λ(2H − λL2 )]
2
4
(105)
1
1
5
(S+ S− + S− S+ ) = (2H − λL2 )2 − ω 2 (L2 + 1) − λ(H − λL2 ).
(106)
2
4
4
Dalle relazioni di commutazione e anticommutazione appena ricavate si nota che le
quantità S∓ S± sono particolari funzioni di L ± 1 :
S+ S− = G(L − 1)
S− S+ = G(L + 1)
con
1
1
G(x) = H2 − (ω 2 + λ2 + λH)x2 + λ2 x4 .
(107)
4
4
Attraverso semplici calcoli algebrici si verifica che dalla definizione (107) per la G(x), si
riesce a ri-ottenere la forma delle due relazioni (105) e (106), con l’unica condizione che
[x, H] = 0 :
G(x − 1) − G(x + 1)
1
1
= (ω 2 + λ2 + λH)[(x + 1)2 − (x − 1)2 ] − λ2 [(x + 1)4 − (x − 1)4 ]
4
4
1
1
= [(x + 1)2 − (x − 1)2 ](ω 2 + λ2 − λ2 [(x + 1)2 + (x − 1)2 ] + λH)
4
4
1 2 1 2 2
1
2
= 4x[ω + λ − λ (x + 1) + λH] = 2x[2(ω 2 − λ2 ) + λ(2H − λx2 )]
4
2
4
32
e allo stesso modo
=
=
=
=
=
G(x − 1) + G(x + 1)
1
1
2H2 − (ω 2 + λ2 + λH)[(x + 1)2 + (x − 1)2 ] + λ2 [(x + 1)4 + (x − 1)4 ]
4
4
1 2
1 2 4
2
2
2
2H − 2(ω + λ + λH)(x + 1) + λ (x + 6x2 + 1)
4
2
1
1
2H2 − ( λ2 + 2λH)(x2 + 1) + λ2 (x4 + 6x2 + 1) − 2ω 2 (x2 + 1)
2
2
1 2 2 1 2
1
1
2
2
2 4
(4H − 4λHx + λ x ) − ( λ x + λ + 2λH − 3λ2 x2 − λ2 ) − 2ω 2 (x2 + 1)
2
2
2
2
1
5 2
2 2
2 2
2[ (2H − λx ) − ω (x + 1) − λ(H − λx )];
4
4
infine se x = L allora
S+ S− − S− S+ = G(L − 1) + G(L + 1)
S+ S− + S− S+ = G(L − 1) − G(L + 1).
A questo punto si scrivono le due componenti del tensore normalizzato a traccia nulla
Nij , definito52 nella (48):
1
N± = [S± f (L, H) + f (L, H)S± ].
2
Il commutatore tra le sue due componenti risulta
[N+ , N− ] = −ı[N11 , N12 ] + ı[N22 , N12 ],
ma dalla (47) [N11 , N12 ] = ı2L e [N22 , N12 ] = −ı2L quindi
[N+ , N− ] = 4L;
(108)
d’altra parte dalla definizione di N± in termini S± e f (L, H), con la (106) e (107), si
ottiene un’altra espressione per il commutatore appena calcolato, ovvero53
1
1
[N+ , N− ] = (S+ f + f S+ )(S− f + f S− ) − (+ ↔ −)
4
4
52
53
Tale che se (S+ )† = S− allora anche (N+ )† = N−
Se f = f (L) e f ± = f (L ± 2) dalla (87), f S± = S± f ± o ugualmente S± f = f ∓ S± . Inoltre f (L) e
f (L ± 2) commutano con S∓ S± = G(L ± 1) in quanto funzioni dirette di H ed L.
33
e separatamente
4N+ N− = (S+ f + f S+ )(S− f + f S− )
= S+ f S− f + S+ f 2 S− + f S+ S− f + f S+ f S−
= f − f S+ S− + (f − )2 S+ S− + f 2 S+ S− + f f − S+ S−
= [f 2 + 2f f − + (f − )2 ]S+ S− = (f + f − )2 G(L − 1)
quindi
con
infine
N+ N− = φ2 (L − 1)G(L − 1)
N− N+ = φ2 (L + 1)G(L + 1)
1
φ(L ± 1) = [f (L, H) + f (L ± 2, H)];
2
[N+ , N− ] = φ2 (L − 1)G(L − 1) − φ2 (L + 1)G(L + 1).
(109)
Uguagliando la (108) e la (109) e definendo F (x) ≡ φ2 (x)G(x) con x = L + 1, si ottiene
la seguente equazione alle differenze finite
F (x + 1) − F (x) = 1 − 2x.
Di nuovo la soluzione dell’omogenea associata è una costante, ad esempio una funzione
arbitraria di una quantità conservata del sistema comeΓ(H); Come soluzione particolare
si può facilmente verificare che scegliendo Fp (x) = −x2 l’equazione risulta soddisfatta.
In definitiva la soluzione generale è F (x) = Γ(H) − x2 o allo stesso modo:
φ2 (x) =
Γ(H) − x2
.
G(x)
Come già visto nella trattazione classica del problema dell’oscillatore, la funzione arbitraria Γ(H) è legata al Casimir del gruppo SU (N ) tramite la seguente relazione
4(1 − N −1 )C(H) ≡ Nij Nji + Lij Lij = 4(1 − N −1 )(Γ(H) − 1)
scegliendo J1 = (Γ(H) − 1)1/2 .
Per N = 2 si ha
1
N+ N− + N− N+ = T r(N2 ) − T r2 (N),
2
ma per definizione Nij è un tensore simmetrico a traccia nulla quindi Nij Nji = T r(N2 ) =
N+ N− + N− N+ e infine
1
C(H) = (N+ N− + N− N+ ) + L2 = Γ(H) − 1.
2
34
(110)
La (107) e la (110) permettono di riscrivere la φ2 (x) nella seguente forma
φ2 (x) =
C + 1 − x2
;
H2 − (ω 2 + 41 λ2 + λH)x2 + 14 λ2 x4
la funzione C(H) potrà dunque essere determinata richiendendo cheφ2 (x) sia positivo
(definito positivo), in modo tale che il denominatore contenga il numeratore come un
fattore
1
1
H2 − (ω 2 + λ2 + λH)y + λ2 y 2 = (C + 1 − y)(αy + β)
4
4
con y = x2 . Dal confronto fra le due espressioni
1
1
H2 − (ω 2 + λ2 + λH)y + λ2 y 2 = β(C + 1) − [β − (C + 1)α]y − αy 2
4
4
2
H
le relazioni per α e β risultano α = − 14 λ2 e β = C+1
, mentre dall’equazione β−(C+1)α =
1 2
2
ω + 4 λ + λH si ricava l’espressione dell’Hamiltoniana in termini del Casimir:
1
1
H2 − λ(C + 1)H + λ2 (C + 1)2 − (ω 2 + λ2 )(C + 1) = 0
4
4
e risolvendo54 rispetto ad H si ottiene
1
1
1
H = λ(C + 1) + [(ω 2 + λ2 )(C + 1)] /2 .
2
4
(111)
Nella ben nota rappresentazione irriducibile del Casimir per il gruppo SU (2), quest’ultimo agisce sugli autostati di base55 restituendo come autovalore n(n + 2), dove n è un
numero intero non negativo. In definitiva i livelli energetici dell’oscillatore risultano
1
En = λ(n + 1)2 + ω 0 (n + 1)
2
(112)
con ω 0 = (ω 2 + 41 λ2 )1/2 ; inoltre per ogni n vi sono l = −n, −n + 2, ......, n − 2, n.
3.2.2 Relazioni di ricorrenza e autofunzioni
Anche in questo caso, le autofunzioni simultanee di H ed L2 , saranno ricavate sfruttando l’azione degli operatori a scala S± scritti nella rappresentazione delle coordinate (o di Schrödinger) come operatori differenziali. In questo modo si riusciranno a
generare relazioni di ricorrenza per la parte radiale della funzione d’onda e quindi a
ricavare l’espressione della funzione d’onda totale, dove la dipendenza angolare è racchiusa nelle armoniche sferiche. Per prima cosa, combinando la definizione per cui
54 1
λ(C
2
55
+ 1) ± 12 [λ2 (C + 1)2 − λ2 (C + 1)2 + 4(ω 2 + 14 λ2 )(C + 1)] /2 = 12 λ(C + 1) ± [(ω 2 + 41 λ2 )(C + 1)] /2
Ad esempio nella la base costituita dagli autostati simultanei di L2 ed H con cui il Casimir commuta
per definizione, si ha C |E, li = n(n + 2) |E, li con n = 0, 1, 2.., ∞. Ora se si fa agire C + 1 si ottiene
(C + 1) |E, li = n(n + 2) + 1 |E, li = (n + 1)2 |E, li.
1
35
1
N± = 21 [S± f (L, H) + f (L, H)S± ] con la (104), si deduce che
1
1
N± = [S± f (L, H) + S± f (L ± 2, H)] = S± [f (L, H) + f (L ± 2, H)]
2
2
e di conseguenza sapendo che φ(L ± 1) = 12 [f (L, H) + f (L ± 2, H)] si ha
S± = N± φ−1 (L ± 1).
Dai calcoli effettuati in precedenza, con α = − 14 λ2 e β =
φ−2 (x) =
H2
C+1 ,
si può scrivere che
1
H2
− λ 2 x2
C +1 4
inoltre dalla (111) H = 12 λ(C + 1) + λγ(C + 1)1/2 con γ = λ−1 (ω 2 + 14 λ2 )1/2 e
H2 =
=
=
1 2
3
λ (C + 1)2 + λ2 γ 2 (C + 1) + λ2 γ(C + 1) /2
4
1 2
1
λ (C + 1)[(C + 1) + 4γ 2 + 4γ(C + 1) /2 ]
4
1 2
1
λ (C + 1)[2γ + (C + 1) /2 ]2 ;
4
infine
φ−2 (x) =
=
1
1 2
1
λ [2γ + (C + 1) /2 ]2 − λ2 x2
4
4
i
1 2h
1/2 2
λ [2γ + (C + 1) ] − x2 .
4
Quindi, le due relazioni per le due componenti S± del tensore di Fradkin, in termini
delle due componenti N± del suo corrispondente tensore notmalizzato a traccia nulla,
risultano
S± =
h
i1/2
1
1
λN± [2γ + (C + 1) /2 ]2 − (L ± 1)2
.
2
(113)
Il passo successivo sta nel comprendere l’azione degli operatori N± sugli autostati simultanei |E, li ≡ |n, li di H ed L2 . A tale proposito è utile ricavare alcune relazioni di
commutazione; una già nota è la seguente
[N+ , N− ] = 4L,
mentre considerando che N± =
f (L, H) commuta con L si ha
1
2 [S± f (L, H)
36
(114)
+ f (L, H)S± ], [L, S± ] = ±2S± e che f =
1
1
[L, N± ] = [L, S± ]f + f [L, S± ] = ±(S± f + f S± ),
2
2
quindi
(115)
[L, N± ] = ±2N± .
Ora la (114) e la (115) bastano per garantire che gli N± fungono da operatori di innalzamento e abbassamento per gli autostati del momento angolare L; di conseguenza le due
equazioni agli autovalori, ricordando che (N+ )† = N− , sono56
N+ |n, li = c+
n,l |n, l + 2i
N− |n, li = c−
n,l |n, l − 2i
e gli autovalori, utilizzando la (110), risultano
2
+
cn,l = hn, l| N− N+ |n, li = hn, l| C(H) − L(L + 2) |n, li = n(n + 2) − l(l + 2)
2
−
cn,l = hn, l| N+ N− |n, li = hn, l| C(H) − L(L − 2) |n, li = n(n + 2) − l(l − 2).
In generale si usa scegliere i coefficenti c+ e c− reali e positivi, definendo in questo modo
la fase arbitraria degli autostati |n, li di H ed L2 , quindi
N± |n, li = [n(n + 2) − l(l ± 2)] /2 |n, l ± 2i
1
(116)
o in maniera equivalente, con C = C(H), si possono riscrivere nel seguente modo
2
±
cn,l = hn, l| C − L(L ± 2) |n, li = hn, l| (C + 1) − (L ± 1)2 |n, li
= (n + 1)2 − (l ± 1)2 = (n ± l)(n ∓ l) + 2(n ∓ l) = (n ∓ l)(n ± l + 2),
e conseguentemente, con la convenzione standard sulle fasi, dalla (113) si ottiene
1/2
1 |n, l ± 2i .
S± |n, li = λ [n(n + 2) − l(l ± 2)] [2γ + (n + 1)]2 − (l ± 1)2
2
(117)
Infine esprimendo gli operatori S± nella rappresentazione delle coordinate (polari), dalla
relazione appena ricavata si generano le due relazioni di ricorrenza per le autofunzioni
radiali57
(l + 1) |Cn,l |
∂
l(l + 1) En
2
(l + 1)(cot χ
− l cot χ) −
+
Xn,l (χ) = −
Xn,l+2 (χ) (118)
∂χ
2
λ
λ
56
57
Si ricorda che l = −n, −n + 2, ..., n − 2, n , quindi l varia a passi di 2.
L’autofunzione totale è |n, li → ψn,l (x) = Xn,l (χ)eilϕ .
37
e
(l − 1) |Cn,l−2 |
l(l − 1) En
∂
2
− l cot χ) −
+
Xn,l (χ) = −
Xn,l−2 (χ)
−(l − 1)(cot χ
∂χ
2
λ
λ
(119)
con
2 2λ
2γ
2γ
2
|Cn,l | =
(n − l)(n + l + 2)
+1
+1 .
l+1
n−l
n+l+2
Dalla (118) e (119), con un po di lavoro, si riesce infine a derivare l’espressione per
l’autofunzione radiale Xn,l (χ), che risulta
1
Xn,l (χ) = An,l (sin χ)−l (cos χ)γ+ 2 Zn,l
dove
Zn,l−2
e An,l−2 =
∂
= csc χ (2l − 2) cot χ
− (n − l)(2γ + n + l + 2) Zn,l
∂χ
2
λ
A .
2(l−1)|Cn,l−2 | n,l
(120)
(121)
Per ricavare tutti gli Zn,l basta imporre n = l nella (118),
ma dato che n = lmax il termine a secondo membro non può che annullarsi58 , il che
equivale a dire
∂
(
− 2n cot χ)Zn,n (χ) = 0,
∂χ
la cui soluzione è
Zn,n (χ) = sin2n χ.
A questo punto grazie alla (121) si possono generare tutte le Zn,l , per ogni l = −n, ....., n
(n fissato); invece la costante An,n si determina, ancora una volta, imponendo la condizione di normalizzazione59 tra le autofunzioni radiali Xn,l (χ) :
ˆ
−1
λ
0
π
2
dχ sin χXn∗0 ,l Xn,l = δnn0 .
(122)
4 Conclusioni
In questo lavoro sono stati discussi, separatamente, i problemi di Keplero-Coulomb e
dell’oscillatore armonico in uno spazio N-dimensionale a simmetria sferica. Si è visto che
i corrispondenti sistemi classici appartengono, rispettivamente, ai gruppi di simmetria
dinamica SO(N +1) e SU (N ). Il primo di questi gruppi è generato dal momento angolare
L e dal vettore Runge-Lenz generalizzato M, mentre la seconda è generata da L e dal
tensore Fradkin generalizzato N. Questi risultati sono stati dimostrati in modo esplicito
riscrivendo le algebre di Poisson classiche nelle forme richieste; di seguito sono riportate,
58
59
Infatti S+ |n, ni = 0, o anche |Cn,n | = 0.
I calcoli sono gli stessi effettuati nella derivazione della (89), con l’unica differenza che in 2 dimensioni
la parte radiale dell’elemento infinitesimo di volume è dx → rdr.
38
considerando una particolare rappresentazione, le relazioni di commutazione (algebra di
Poisson) tra i generatori di tali gruppi di simmetrie dinamiche:
Per SO(N + 1) (Keplero-Coulomb) si hanno
{Mi , H} = 0
{Mi , Mj } = Lij
{Lij , Mk } = Mj δik − Mi δjk ;
per SU (N ) (oscillatore armonico) invece
{Nij , H} = 0
{Nij , Nkl } = Lik δjl + Lil δjk + Ljk δil + Ljl δik
{Lij , Nkl } = Nik δjl + Nil δjk − Njk δil − Njl δik ,
mentre sono comuni le relazioni di commutazione che coinvolgono il momento angolare,
in quanto generatore di entrambi i gruppi, quindi
{Lij , H} = 0
{Lij , Lkl } = Lik δjl + Lli δjk + Lkj δil + Ljl δik .
Al contrario, in meccanica quantistica, le algebre dei commutatori si ottengono, per
entrambi i sistemi, restringedosi al caso bidimensionale. Questo è stato mostrato solo nel
problema dell’oscillatore, ma si sarebbe potuto procedere allo stesso modo anche nel caso
Kepleriano[1] . Difatti come ci si aspettava, le relazioni di commutazione tra i generatori
del gruppo SU (2), con N = 2, sono
[N± , H] = 0
[N± , N∓ ] = ±4L
[L, N± ] = ±2N±
e allo stesso modo si sarebbero ottenute[1] , per il gruppo SO(3), con N = 2, le seguenti
relazioni
[M± , H] = 0
[M± , M∓ ] = ±2L
[L, M± ] = ±M±
In questo caso particolare, oltre che a mostrare chiaramente le simmetrie dei due siste-
39
mi, le tecniche standard della teoria dei gruppi hanno portato anche alla risoluzione del
problema agli autovalori per l’Hamiltoniana del sistema, quindi alla derivazione dello
spettro. Le stesse tecniche non sono però applicabili, considerando un numero più elevato di dimensioni N ≥ 3; a causa di ciò è stato adottato un metodo alternativo dovuto a
Pauli[4] , perfettamente generalizzabile ad un numero arbitrario di dimensioni, che riesce a
fornire i mezzi per la risoluzione dei problemi agli autovalori per i rispettivi sistemi. Tale
procedimento è stato mostrato solamente per il problema di Keplero-Coulomb in N = 3;
tuttavia, si sarebbe potuto trattare allo stesso modo anche il problema dell’oscillatore[2] .
Tale metodologia consiste sostanzialmente nel considerare, invece che l’algebra dei generatori, l’algebra dei loro elementi di matrice nella rappresentazione degli autostati
dell’energia (Hamiltoniana) e del momento angolare. Una volta ottenuti i valori di tali
elementi di matrice, si trovano gli autovalori dell’energia,e successivamente tale metodo
può essere esteso in maniera tale da fornire relazioni di ricorrenza in grado di generare
le relative autofunzioni. In questo caso si dimostra che la tecnica adottata è del tutto
equivalente a un metodo dovuto a Schrödinger[3] per la risoluzione di alcuni tipi di equazioni differenziali60 . D’altra parte lo svantaggio che si ha nell’adoperare tali tecniche di
risoluzione è la difficoltà di mostrare in maniera diretta le simmetrie del sistema.
Riferimenti bibliografici
[1] P.W.Higgs, “Dynamical symmetries in a spherical geometry I ” J. Phys. A: Math.
Gen. 12, 309 (1979).
[2] H.I.Leemon, “Dynamical symmetries in a spherical geometry II ” J. Phys. A: Math.
Gen. 12, 489 (1979).
[3] E.Schrödinger, “A method of determining quantum mechanical eigenvalues and eigenfunctions” Proc. R. Iri. Acad. 46, 9 (1941); “Further studies of solving eigenvalue
problems by factorisation” 46, 183 (1941); “The factorization of the hypergeometric
equation” 47, 53 (1941).
[4] W.Pauli, “Über das wasserstoffspektrum vom standpunkt der neuen quantenmechanik” Z . Phys. 36, 336 (1926)
[5] D.M.Fradkin “Three dimensional isotropic-armonic oscillator and SU(3)” Am . J.
Phys. 33, 207 (1965)
[6] M.Lakshmanan, K.Eswaran, “Quantum dynamics of a solvable nonlinear chiral
problem” J. Phys. A : Math. Gen. 8,1659 (1975).
[7] E.G.Kalnis, W.Miller Jr, G.S Pogosyan, “Coulomb-oscillator duality in spaces of
constant curvature” J. Math. Phys. 41, 5 (2000).
[8] A.R.Edmonds, Angular momentum in quantum mechanics. (CERN, 1957) .
60
Consiste nella risoluzione dell’equazione di Schrödinger radiale, tramite la fattorizzazione di un
operatore differenziale del secondo ordine.
40
[9] J.J.Sakurai, Jim Napolitano, Modern quantum mechanics. 2nd ed. (Pearson, 1994).
[10] H.Goldstein, Classical mechanics. 3rd ed. (Addison-Wesley, 1980).
[11] D.Boccaletti, G.Pucacco, Theory of orbits; volume 1. Integrable systems and nonperturbative methods (Springer, 1996); volume 2. Perturbative and geometrical
methods (Springer, 1999).
[12] H.Georgi, Lie algebras in particles physics. 2nd ed. (Westview press, 1999).
41