Lezione XXIII
Corpo rigido
1
Rotolamento puro
Consideriamo il problema bidimensionale del moto di un cilindro di raggio R
su una superficie, per esempio piana e orizzontale. Si tratta di un moto di
rototraslazione descritto per esempio da posizione e velocità nel piano x, y, con
y asse verticale e avendo preso l’asse z parallelo all’asse del cilindro.
Il moto si chiama di rotolamento puro o rotolamento senza strisciare se la
velocità relativa punto del cilindro a contatto con la superficie e la superficie
stessa è nulla (la porzione di cilindro a contatto con la superficie “non striscia”).
vO
ω × rP"
vP
P
vO
O
vO
O
ω × rP" = −vO
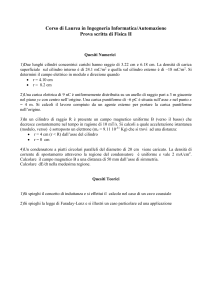
P Figura 1: A sinistra: Velocità di un punto sulla superficie di un cilindro in moto
di rototraslazione (traslazione orizzontale e rotazione attorno al proprio asse).
A destra: Il moto di rotolamento puro si ha quando il punto P di contatto tra
cilindro e piano d’appoggio ha velocità nulla rispetto al piano.
Usiamo l’equazione trovata nella lezione precedente per esprimere la velocità
generica del punto P di contatto, prendendo come punto O di riferimento la
proiezione sul piano x, y dell’asse del cilindro:
~vP = ~vO + ω
~ × ~rP0
Sapendo che ~vO è per motivi geometrici parallela al piano di appoggio e
quindi diretta lungo x, che ω
~ è diretta lungo z e che ~rP0 è diretto lungo y
essendo perpendicolare al piano d’appoggio, abbiamo
~vP = vO x̂ + ωẑ × (−R)ŷ = vO x̂ − ωR(ẑ × ŷ) = (vO + ωR)x̂
La velocità del punto di contatto è in generale diretta lungo x e vale vP =
vO + ωR, dove ω è al solito positiva se la rotazione avviene in senso antiorario.
1
La condizione di rotolamento puro è data da vP = 0 e dunque da
vO = −ωR
(1)
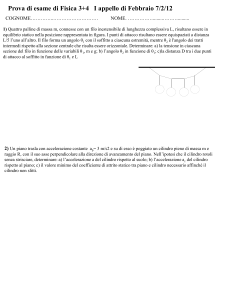
Questo non è altro che la richiesta che, nel tempo dt in cui il cilindro ruota
di dθ = ωdt il suo asse sia avanzato di dx = vdt = R|dθ|: se la velocità angolare
è uniforme, quando la ruota ha compiuto un giro completo ∆θ = 2π ha percorso
un tratto |∆x| pari alla lunghezza della circonferenza 2πR .
= πR
vO
= πR
Figura 2: Cilindro che rotola senza strisciare: dopo mezzo giro ha percorso un
tratto pari a mezza circonferenza.
• Esempio: moto di un cilindro su un piano orizzontale scabro.
Supponiamo che il cilindro, appoggiato su un piano orizzontale con coefficiente di attrito dinamico µD sia impressa una velocità iniziale v0 nel
verso positivo delle x. A un dato istante il moto del cilindro è completamente determinato dalla velocità vx di un qualunque punto dell’asse e
dalla velocità angolare ω, presa al solito positiva quando la rotazione è
antioraria.
N = −mg
ω
vO
O
FA
Figura 3: Cilindro su piano orizzonale scabro.
2
Le forze agenti sul cilindro sono la forza di gravità, la reazione normale
~ e l’eventuale forza di attrito dinamico F~A diretta in verso opposto alla
N
velocità.
La prima equazione cardinale determina il moto del centro di massa, che
per simmetria si trova sull’asse del cilindro. Scriviamola per componenti,
orientando l’asse y in direzione opposta alla gravità.
~ | − mg = may = 0
Fy = |N
~ |v̂ = max
Fx = Fa = −µD |N
~ | = mg; dalla seconda, sostituenDalla prima equazione deduciamo che |N
~
do il valore di |N | deduciamo
ax = −µD g
in cui il segno meno (accelerazione negativa lungo x) vale fintanto che la
velocità vx ha segno positivo.
L’equazione, unita alla condizione iniziale vx (0) = v0 ci dà direttamente
come soluzione per la velocità orizzontale
vx (t) = v0 − µD gt
Il moto uniformemente accelerato (con accelerazione negativa), e la velocità decresce linearmente nel tempo. Naturalmente la soluzione rimane
valida fintantoché la forza di attrito dinamico sussiste e ha segno negativo.
La seconda equazione cardinale si può scrivere per i momenti assiali rispetto all’asse del cilindro, notando che l’unica forza esterna che ha momento
rispetto al centro di massa è la forza di attrito: la forza di gravità infatti
non ha mai momento rispetto al centro di massa, e la forza di reazione
~ , applicata nel punto di contatto, ha braccio nullo rispetto all’asse.
N
dω
dLz
=I
= τz = −|F~A |R = −µD mgR
dt
dt
Se la forza di attrito è diretta nel verso negativo delle x, il momento torcente rispetto all’asse del cilindro è negativo (tende a farlo ruotare in senso
orario), come si può verificare anche usando l’espressione per componenti
del prodotto vettoriale.
La soluzione per ω(t), data la condizione iniziale ω(0) = 0,
µD mgR
2µD g
t=−
t
I
R
dove abbiamo usato che per un cilindro omogeneo il momento di inerzia
rispetto all’asse di simmetria vale I = 12 mR2
ω(t) = −
Naturalmente anche questa soluzione vale fintanto che sussiste la forza di
attrito e ha segno negativo, ossia fintanto che la velocità del punto di
contatto tra cilindro e piano scabro è positiva.
3
Calcoliamo questa velocità:
vP (t) = v(t) + ω(t)R = v0 − µD gt − 2µD gt
che si annulla per
t̄ =
v0
3µD g
Nel momento in cui si annulla la velocità del punto di contatto, la forza di
attrito dinamico cessa e verrebbe rimpiazzata da una forza di attrito statico
se ci fosse una forza orizzontale residua, che in questo caso è assente.
Dunque per t > t̄ sia la forza esterna totale orizzontale sia il momento
esterno delle forze sono nulli, e il moto procede come rotolamento con
velocità e velocità angolare costanti
v(t > t̄) =
2
v0
3
ω(t > t̄) = −
2v0
3R
• Esempio: rotolamento senza strisciare di un cilindro su un piano
inclinato scabro
Supponiamo che il cilindro omogeneo rotoli senza strisciare lungo un piano
inclinato di un angolo α rispetto al piano orizzontale.
N = mg cos α
ω=
v
R
vO
O
FA
mg
Figura 4: Cilindro che rotola senza strisciare lungo un piano inclinato.
Orientiamo per comodità gli assi x e y rispettivamente lungo la discesa del
piano e in direzione perpendicolare, e scriviamo le due equazioni cardinali
per il cilindro.
4
La prima, per componenti, dà:
~ | − mg cos α = may = 0
Fy = | N
Fx = mg sin α − |F~A | = max
La prima ci dà il valore della forza di reazione normale
~ | = mg cos α
|N
La seconda determina l’accelerazione lungo il piano, in funzione della forza
incognita di attrito statico (dato che per ipotesi non c’è strisciamento del
punto di contatto sul piano) F~A :
ax = g sin α −
1 ~
|FA |
m
Nella seconda equazione cardinale anche in questo caso il momento delle
forze esterne rispetto all’asse che passa per il centro di massa è dato dalla
sola forza di attrito
dω
dLz
=I
= τz = −|F~A |R
dt
dt
Abbiamo due equazioni e tre incognite: vx (t), ω(t) e |F~A |.
equazione è la relazione di rotolamento puro
La terza
vx = −ωR
che, derivata rispetto al tempo, dà
ax = −
dω
R
dt
Questo permette di ricavare |F~A | dalla seconda equazione cardinale:
|F~A | =
I
ax
R2
Sostituendola nell’equazione lungo x abbiamo
ax = g sin α −
I
ax
mR2
da cui
ax 1 +
I
mR2
ax =
5
= g sin α
g sin α
I
1 + mR
2
che, nel caso di cilindro omogeneo con I = 12 mR2 , dà
ax =
2
g sin α
3
e, di conseguenza,
|F~A | =
1
I
ax = g sin α
R2
3
Osserviamo che questa è una forza di attrito statico, e deve quindi soddisfare
~|
|F~A | < µS |N
~ | sia |F~A |, troviamo che il moto di puro rotoAvendo determinato sia |N
lamento è possibile se
1
g sin α < µS mg cos α
3
e dunque
1
tan α < µS
3
Dato il coefficiente di attrito statico esiste un angolo massimo sopra il
quale non è possibile il rotolamento; viceversa, dato l’angolo esiste un
coefficiente di attrito minimo al di sotto del quale il rotolamento non è
possibile.
6