M×S
Matematica per Scienze
c
2012
- Maurizio Cailotto - [email protected]
Questo testo è stato prodotto con LATEX (usando hyperref per i link e MetaPost per i
disegni) come supporto didattico per un corso di Matematica dei corsi di laurea triennali
scientifici dell’Università di Padova.
Il testo è organizzato per presentare la teoria in modo preciso e diretto, rimandando con dei
link ad approfondimenti, esempi ed esercizi, ed eventualmente da questi alle soluzioni. È
pensato quindi per essere consultato su portatili, tablet o smartphone dotati di un lettore
pdf che supporti i link interni, e non per essere stampato.
Si consiglia quindi, e si richiede, di non stampare il file pdf: sia per evitare l’uso indiscriminato di carta, sia perché in tal caso si perde la possibilità di usare i link del testo. L’estensore
delle note è anche convinto che la matematica si impari meglio provando a svolgere da sè gli
argomenti suggeriti, piuttosto che leggendo tutto da un libro stampato.
Il file è stato scritto inizialmente nel settembre 2012 e diffuso tramite la pagina web dell’autore
http://www.math.unipd.it/~maurizio/; chi trovasse errori o inesattezze può segnalarle
all’autore usando l’indirizzo [email protected].
c 2012-∞ Tutti i diritti di questo testo (incluse le eventuali edizioni precedenti) sono
riservati all’autore Maurizio Cailotto. Non ne è consentito alcun uso a scopi commerciali.
Sono consentite la riproduzione e la circolazione su supporto elettronico portatile ad esclusivo
uso scientifico, didattico o documentario, purché il documento non venga alterato in alcun
modo, ed in particolare mantenga le corrette indicazioni di data e fonte originale e la presente
nota di copyright.
Indice
1 Insiemi numerici e funzioni.
1.1 Insiemi e Numeri. . . . . . . . . .
1.1.1 Insiemi e relazioni. . . . .
1.1.2 Numeri naturali. . . . . .
1.1.3 Numeri interi. . . . . . . .
1.1.4 Numeri razionali. . . . . .
1.1.5 Numeri reali. . . . . . . .
1.1.6 Numeri complessi. . . . .
1.2 Funzioni. . . . . . . . . . . . . .
1.2.1 Funzioni e loro proprietà.
1.2.2 Limiti. . . . . . . . . . . .
1.2.3 Successioni. . . . . . . . .
1.2.4 Serie. . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
1
3
5
5
6
7
11
11
12
13
16
2 Calcolo in una variabile.
2.1 Funzioni reali elementari. . . . . . . . . . . .
2.1.1 Proprietà. . . . . . . . . . . . . . . . .
2.1.2 Potenze e radici. . . . . . . . . . . . .
2.1.3 Esponenziali e logaritmi. . . . . . . . .
2.1.4 Funzioni trigonometriche e inverse. . .
2.1.5 Funzioni iperboliche e inverse. . . . . .
2.2 Limiti e continuità. . . . . . . . . . . . . . . .
2.2.1 Limiti. . . . . . . . . . . . . . . . . . .
2.2.2 Continuità. . . . . . . . . . . . . . . .
2.3 Derivate. . . . . . . . . . . . . . . . . . . . . .
2.3.1 Derivate. . . . . . . . . . . . . . . . .
2.3.2 Massimi e minimi locali. . . . . . . . .
2.3.3 Proprietà fondamentali. . . . . . . . .
2.3.4 Regole di De L’Hôpital. . . . . . . . .
2.3.5 Derivate seconde e convessità. . . . . .
2.3.6 Studio di funzioni. . . . . . . . . . . .
2.3.7 Approssimazioni e sviluppi di Taylor. .
2.4 Integrali. . . . . . . . . . . . . . . . . . . . . .
2.4.1 Somme e integrali alla Riemann. . . .
2.4.2 Primitive. . . . . . . . . . . . . . . . .
2.4.3 Primitive di funzioni elementari. . . .
2.4.4 Applicazioni. . . . . . . . . . . . . . .
2.4.5 Integrali generalizzati. . . . . . . . . .
2.4.6 Approssimazioni e sviluppi di Fourier.
2.5 Equazioni differenziali. . . . . . . . . . . . . .
2.5.1 Problema generale. . . . . . . . . . . .
2.5.2 Prim’ordine. . . . . . . . . . . . . . .
2.5.3 Second’ordine. . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
20
20
20
21
21
22
23
25
25
28
30
30
32
32
33
34
35
35
39
39
40
42
44
48
50
53
53
53
56
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
i
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
INDICE
3 Geometria lineare.
3.1 Spazi numerici, funzioni e sistemi lineari. .
3.1.1 Punti e vettori. . . . . . . . . . . .
3.1.2 Funzioni lineari e Matrici. . . . . .
3.1.3 Soluzione di sistemi lineari. . . . .
3.2 Piano. . . . . . . . . . . . . . . . . . . . .
3.2.1 Rette. . . . . . . . . . . . . . . . .
3.2.2 Distanze. . . . . . . . . . . . . . .
3.2.3 Aree. . . . . . . . . . . . . . . . . .
3.2.4 Coniche. . . . . . . . . . . . . . . .
3.3 Spazio. . . . . . . . . . . . . . . . . . . . .
3.3.1 Prodotto vettore e prodotto misto
3.3.2 Rette e piani. . . . . . . . . . . . .
3.3.3 Distanze. . . . . . . . . . . . . . .
3.3.4 Angoli. . . . . . . . . . . . . . . .
3.3.5 Aree e Volumi. . . . . . . . . . . .
3.3.6 Quadriche. . . . . . . . . . . . . .
A Addendum
S Soluzioni
ii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
59
59
59
63
67
69
69
70
70
70
72
72
73
74
75
75
76
314
3141
Capitolo 1
Insiemi numerici e funzioni.
Questo capitolo è dedicato ad un veloce ripasso dei sistemi numerici più usati e delle loro
proprietà, nonché alle nozioni di relazione e funzione. Introduciamo inoltre un concetto
generale di limite che useremo subito nel caso di successioni (il caso più semplice di funzioni
numeriche), e poi nel caso di funzioni di una o più variabili reali.
1.1
Insiemi e Numeri.
Non faremo una teoria formale degli insiemi, ma faremo uso del concetto ingenuo: per evitare
paradossi diciamo di aver fissato una volta per tutte un ambiente che contenga gli oggetti di
interesse.
1.1.1
Insiemi e relazioni.
Definizione 1.1.1.1 (Insiemi, elementi). Un insieme è una qualsiasi collezione di oggetti,
che si dicono gli elementi dell’insieme. Un insieme può essere quindi definito enumerando i
suoi elementi (se è finito), oppure dichiarando una proprietà caratteristica dei suoi elementi
(ovvero quali proprietà devono avere gli oggetti per esserne elementi).
Indicheremo con lettere maiuscole A, B, C, . . . gli insiemi, con lettere minuscole a, b, c, x, y
gli oggetti, e scriveremo a ∈ A (“a appartiene ad A”) per dire che a è un elemeto di A, x ∈
/A
(“x non appartiene ad A”) per l’opposto.
1.1.1.2 (Vuoto). Uno dei più importanti insiemi è l’insieme vuoto: si indica con ∅ ed è
definito dalla proprietà di non avere alcun elemento. Dunque ∅ ⊆ A per ogni insieme A)
1.1.1.3 (Inclusione). Se A e B sono insiemi dati, scriveremo A ⊆ B (“A sottinsieme di
B”) per dire che ogni elemento di A è elemento anche di B (x ∈ A ⇒ x ∈ B). Diremo che
due sottinsiemi sono uguali A = B se A ⊆ B e B ⊆ A (hanno gli stessi elementi).
Tra gli insiemi definiamo alcune operazioni:
1.1.1.4 (Unione). Se A e B sono insiemi dati, definiamo la loro unione come A ∪ B =
{x : x ∈ A oppure x ∈ B} (è il più piccolo insieme contenente sia A che B). Naturalmente
A ∪ ∅ = A, A ∪ A = A, e in generale A ∪ B = A se e solo se B ⊆ A.
1.1.1.5 (Intersezione). Se A e B sono insiemi dati, definiamo la loro intersezione come
A ∩ B = {x : x ∈ A e x ∈ B} (è il più grande insieme contenuto sia in A che in B).
Naturalmente A ∩ ∅ = ∅, A ∩ A = A, e in generale A ∩ B = A se e solo se B ⊇ A. Due
insiemi si dicono disgiunti se la loro intersezione è vuota.
1.1.1.6 (Distributività). Valgono alcune facili relazioni tra le due operazioni introdotte:
A ∪ (B ∩ C) = (A ∪ B) ∩ (A ∪ C)
A ∩ (B ∪ C) = (A ∩ B) ∪ (A ∩ C)
(si consiglia di provare a verificarlo da soli; per una possibile soluzione, vedi A.1.1)
1
CAPITOLO 1. INSIEMI NUMERICI E FUNZIONI.
2
1.1.1.7 (Complementare). Se A è un insieme dato, definiamo il complementare come
{A = {x : x ∈
/ A} (è il più grande insieme con intersezione vuota con A). Naturalmente si
ha {{A = A e A ⊆ B se e solo se {A ⊇ {B.
1.1.1.8 (De Morgan). Le tre operazioni sono legate dalle leggi di De Morgan, il complementare scambia unione con intersezione, e viceversa:
{(A ∩ B) = {A ∪ {B
{(A ∪ B) = {A ∩ {B
(si consiglia ancora di provare a verificarlo da soli; per una possibile soluzione, vedi A.1.2)
1.1.1.9 (Differenza). Se A e B sono insiemi dati, definiamo la differenza A r B come
A ∩ {B = {x : x ∈ A e x ∈
/ B} (gli elementi di A che non stanno in B).
1.1.1.10 (Prodotto cartesiano). Se A e B sono insiemi dati, definiamo il loro prodotto
cartesiano come A × B = {(x, y) : x ∈ A e y ∈ B} (dove (x, y) indica la coppia ordinata dei
due elementi).
Per esercizio, si trovino le relazioni dell’operazione di prodotto cartesiano con le precedenti
introdotte; per qualche suggerimento di veda A.1.3
1.1.1.11 (Abbreviazioni). Useremo spesso le operazioni precedenti tra più di due insiemi,
e addirittura tra infiniti insiemi in un colpo; useremo allora delle abbreviazioni simili a quelle
che si usano in aritmetica, per esempio:
n
[
i=1
n
\
i=1
n
Y
Ai = A1 ∪ A2 ∪ · · · ∪ An = {x : ∃i con x ∈ Ai }
Ai = A1 ∩ A2 ∩ · · · ∩ An = {x : ∀i si ha x ∈ Ai }
Ai = A1 × A2 × · · · × An = {(x1 , x2 , . . . , xn ) : ∀i si ha xi ∈ Ai }
i=1
e daremo per scontate le proprietà di queste operazioni.
Definizione 1.1.1.12 (Relazioni). Una relazione tra due insiemi è un sottinsieme del loro
prodotto cartesiano. In termini immaginifici, la relazione contiene le coppie di elementi che
si considerano in relazione tra di loro.
Per esempio, la relazione di incidenza tra punti e rette del piano è il sottinsieme del
prodotto cartesiano dell’insieme dei punti e dell’insieme delle rette formato dalle coppie tali
che il punto appartiene alla retta.
1.1.1.13 (proprietà delle relazioni interne). Le relazioni più interessanti sono quelle
tra un insieme A e sè stesso, quindi sottinsiemi di A2 = A × A (quindi si visualizzano come
sottinsiemi del quadrato), e diremo che una relazione è:
(R) riflessiva se contiene tutte le coppie (x, x) (contiene tutta la diagonale principale),
ovvero ogni elemento è in realzione con sè stesso;
(S) simmetrica se contiene anche (y, x) quando contiene (x, y) (è simmetrica rispetto alla
diagonale principale);
(A) antisimmetrica se quando contiene sia (y, x) sia (x, y) implica x = y (è antisimmetrica
rispetto alla diagonale principale);
(T ) transitiva se contiene anche (x, z) quando contiene (x, y) e (y, z).
1.1.1.14 (Equivalenze). Una relazione su un insieme A si dice una equivalenza se essa
è riflessiva, simmetrica e transitiva. Una equivalenza è determinata da una partizione di
A, cioè da una divisione di A in tanti sottinsiemi disgiunti, ciascuno dei quali rappresenta
un sottinsieme di elementi tra loro in relazione. Questi sottinsiemi di dicono le classi di
equivalenza per la relazione data, e l’insieme formato dalle classi di equivalenza di chiama
l’insieme quoziente rispetto alla relazione, e si indica con A/∼ se ∼ indica la relazione di
equivalenza. Per qualche esempio, vedere A.1.4
CAPITOLO 1. INSIEMI NUMERICI E FUNZIONI.
3
1.1.1.15 (Ordini). Una relazione su un insieme A si dice un ordine se essa è riflessiva,
antisimmetrica e transitiva. Si dice totale se ogni coppia di elementi è in relazione, parziale
altrimenti.
Di solito gli ordini si indicano con 6 o simboli simili. In generale in presenza di un insieme
ordinato A e di un suo sottinsieme B usiamo le seguenti nozioni:
• minimo (min) per un sottinsieme: se esiste è un elemento di m ∈ B tale che m 6 B
(abbreviazione di m 6 b per ogni b ∈ B);
• massimo (max) per un sottinsieme: se esiste è un elemento di M ∈ B tale che M > B
(abbreviazione di M > b per ogni b ∈ B);
• limitato inferiomente per un sottinsieme: se esiste a ∈ A tale che B > a;
• limitato superiomente per un sottinsieme: se esiste a ∈ A tale che B 6 a;
• minoranti per un sottinsieme: tutti gli elementi a ∈ A tali che a 6 B;
• maggioranti per un sottinsieme: tutti gli elementi a ∈ A tali che a > B;
• estremo inferiore (inf): il massimo dei minoranti;
• estremo superiore (sup): il minimo dei maggioranti.
Per qualche esempio, vedere A.1.5
1.1.2
Numeri naturali.
1.1.2.1 (Numeri naturali). L’insieme dei numeri naturali si indica con
N = {0, 1, 2, 3, . . . }
ed è supposto noto: si usano per contare gli elementi degli insiemi finiti. Tra i suoi elementi
sappiamo fare la somma +, il prodotto ·, e conosciamo un ordine naturale totale 6.
1.1.2.2 (Proprietà). Ricordiamo solo che: la somma + ha elemento neutro 0 (cioè n+0 = n
per ogni n ∈ N), è commutativa (cioè n + m = m + n per ogni n, m ∈ N), è associativa (cioè
(n + m) + l = n + (m + l) per ogni n, m, l ∈ N);
il prodotto · ha elemento neutro 1 (cioè n · 1 = n per ogni n ∈ N), è commutativo (cioè
n · m = m · n per ogni n, m ∈ N), è associativo (cioè (n · m) · l = n · (m · l) per ogni n, m, l ∈ N),
e che distribuisce rispetto alla somma (cioè n · (m + l) = n · m + n · l per ogni n, m, l ∈ N).
Si noti infine che l’ordine rispetta le operazioni, e ha l’importante proprietà che ogni
insieme non vuoto ammette minimo (principio del minimo).
1.1.2.3 (Primi, decomposizioni). Si dice che m divide n se esiste l ∈ N tale che n = lm.
Ogni numero è diviso da 1 e da sè stesso; i numeri che non hanno altri divisori si dicono
primi. Ogni numero naturale è prodotto di numeri primi, in modo unico a parte l’ordine
dei fattori. Il lettore dovrebbe anche conoscere la divisione con resto tra numeri naturali, e
le nozioni di Massimo Comun Divisore (MCD) e minimo comune multiplo (mcm). Vedere
eventualmente A.1.8
1.1.2.4 (Principio di induzione). Il principio di induzione dice che per ogni sottinsieme
A di N avente le seguenti due proprietà:
(1) contiene lo zero: 0 ∈ A;
(2) per ogni x, se contiene x contiene anche x + 1: ∀x ∈ N, x ∈ A ⇒ x + 1 ∈ A,
allora A = N (A è tutto N).
Per visualizzare l’asserzione, basta pensare a degli oggetti in una fila: se cade il primo e
ognuno fa cadere il successivo allora cadono tutti...
1.1.2.5 (Definizioni per induzione). Il principio di induzione può essere usato per definire
infiniti oggetti Ai indiciati da i ∈ N usando due soli passi:
(1) definire A0 ;
(2) per ogni i, definire Ai+1 usando eventualmente Ai , o anche tutti i precedenti.
Per esempio definiamo per induzione i fattoriali dei numeri interi: per n = 0 poniamo
0! = 1, e nel passo induttivo poniamo (n + 1)! = (n + 1) · n!. Si vede subito che n! risulta
CAPITOLO 1. INSIEMI NUMERICI E FUNZIONI.
4
il prodotto dei primi n numeri interi. Analogamente si definisce il semifattoriale n!! tramite
0!! = 1, 1!! = 1 e (n + 1)!! = (n + 1) · (n − 1)!!.
Per esempio definiamo le potenze naturali di un numero x per induzione: x0 = 1, e poi
i
x = x · xi−1 (si capisce subito che è la solita potenza).
Altro esempio, definiamo i numeri di Fibonacci Ni ∈ N (descrivono la crescita di una
popolazione di conigli immortali tali che ognuno con almeno un anno fa un figlio all’anno)
tramite: F0 = 1, F1 = 1, Fi = Fi−1 + Fi−2 per ogni i > 2.
I numeri sono allora 1, 1, 2, 3, 5, 8, 13, 21, 34, 55, 89, . . . ma darne una formula esplicita è
piuttosto difficile!
Altro esempio, definiamo i coefficienti binomiali per induzione (doppia): n0 = 1 = nn e
poi ni = n−1
+ n−1
i
i−1 . Si vede subito che otteniamo il noto triangolo di Tartaglia:
1
1
1
1
1
1
1
1
5
6
10
21
28
1
4
10
20
35
56
1
3
6
15
7
8
3
4
1
1
2
1
5
15
35
70
1
6
21
56
1
7
28
1
8
1
Per altri esempi, vedi A.1.6
1.1.2.6 (Dimostrazioni per induzione). Il principio di induzione può essere usato per
dimostrare infinite affermazioni Ai indiciate da i ∈ N usando due soli passi:
(1) dimostrare A0 (caso iniziale);
(2) per ogni i, dimostrare che Ai implica Ai+1 , cioè mostrare che Ai+1 è vera se supponiamo che Ai sia vera (si dice ipotesi induttiva)!
Per esempio, dimostriamo per induzione la formula del binomio:
n X
n i n−i
n
xy
(x + y) =
i
i=0
nei due passi:
(1) per n = 0: (x + y)0 = 1; oppure per n = 1: (x + y)1 = x + y;
(2) per n + 1:
(x + y)n+1 = (x + y)(x + y)n
n X
n i n−i
= (x + y)
xy
(ipotesi induttiva)
i
i=0
n n X
X
n i n−i
n i n−i
=x
xy
+y
xy
i
i
i=0
i=0
n n X
n i+1 n−i X n i n−i+1
=
x y
+
xy
i
i
i=0
i=0
n+1
n X n X
n j n+1−j
j n+1−j
=
x y
+
x y
j−1
j
j=1
j=0
n+1
X
n
n
=
(
+
)xj y n+1−j
j
−
1
j
j=0
=
n+1
X
j=0
che è la formula voluta.
Per altri esempi, vedi A.1.7
n + 1 j n+1−j
x y
j
CAPITOLO 1. INSIEMI NUMERICI E FUNZIONI.
1.1.3
5
Numeri interi.
1.1.3.1 (Numeri interi). L’insieme dei numeri interi si indica con
Z = {0, ±1, ±2, ±3, . . . } = {. . . , −3, −2, −1, 0, 1, 2, 3, . . . }
ed si costruisce a partire da N aggiungendo per ogni elemento x ∈ N non nullo un elemento
−x ∈
/ N che sommato con x faccia 0 (opposto di x). Tra i suoi elementi sappiamo fare la
somma +, la differenza −, il prodotto ·, e conosciamo un ordine naturale 6.
Più precisamente, nell’insieme N2 definiamo la relazione (a, b) ∼ (a0 , b0 ) se a + b0 = a0 + b
(di solito scriviamo a − b = a0 − b0 ). Si vede che è una relazione di equivalenza, e Z ne
è l’insieme delle classi di equivalenza (ogni coppia è equivalente a una del tipo (n, 0) = n,
oppure (0, n) = −n).
1.1.3.2 (Proprietà). Oltre alle proprietà già vere nel caso degli interi, ora vale anche che
ogni numero n ha un opposto −n, cioè un numero che sommato con lui dà zero: n+(−n) = 0,
che permette appunto di definire la differenza tra due numeri: n − m = n + (−m). Ne segue
che −(−n) = n per ogni n ∈ Z.
Si noti invece che l’ordine ha perso la proprietà del minimo.
1.1.3.3 (Regole dei segni). L’operazione di prodotto è definita in modo che n·(−1) = −n,
da cui seguono le usuali regole dei segni: n · (−m) = −(n · m), (−n) · m = −(n · m),
(−n) · (−m) = n · m.
1.1.3.4 (Ordine e modulo). Per l’ordine di Z si ha che n 6 m se e solo se −n > −m
(notare l’inversione), e l’insieme N è formato da n ∈ Z con n > 0.
Il modulo di un numero intero n si indica con |n| ed è definito come n se n > 0, come
−n altrimenti. Quindi |n| ∈ N.
1.1.4
Numeri razionali.
1.1.4.1 (Numeri razionali). L’insieme dei numeri razionali si indica con
Q = {p/q : p, q ∈ Z e q 6= 0}
ed si costruisce a partire da Z in modo tale che ogni elemento non nullo x abbia un inverso
(y tale che xy = 1; di solito si scrive y = 1/x). Si ricordi che due scritture ab e pq sono da
considerare uguali quando aq = bp. Tra i suoi elementi sappiamo fare la somma + (usando il
pn+qm
p m
pm
denominatore comune: pq + m
n =
qn ), la differenza −, il prodotto · (facile: q · n = qn ), il
quoziente /, e conosciamo un ordine naturale 6 (per confrontare due numeri, si confrontano
i numeratori a parità dei denominatori).
Più precisamente, nell’insieme Z × Z6=0 definiamo la relazione (a, b) ∼ (a0 , b0 ) se ab0 = a0 b
(di solito scriviamo a/b = a0 /b0 ). Si vede che è una relazione di equivalenza, e Q ne è l’insieme
delle classi di equivalenza.
1.1.4.2 (Proprietà). Oltre alle proprietà di Z, qui abbiamo anche l’esistenza di inversi
moltiplicativi per ogni pq 6= 0: l’inverso è pq (esiste perché p 6= 0).
1.1.4.3 (Scritture dei numeri razionali). I numeri razionali possono essere rappresentati
usando la “divisione con virgola” come scritture del tipo “numero-intero, parte-decimale”
dove la parte decimale può essere di due tipi:
(1) limitata, come nel caso 11
2 = 5, 5
(2) illimitata ma periodica, dopo eventualmente un antiperiodo, come nei casi: 10
3 =
3, 3333 · · · = 3, 3 ovvero 11
=
0,
1222
·
·
·
=
0,
12.
90
Viceversa, ciascuna di queste espressioni, tranne quelle che terminano con 9 periodico rappresentano un unico numero razionale (come? se non ci si ricorda, si veda A.1.9).
Naturalmente, il numero dieci non ha alcuna specialità, se non che noi abbiamo dieci dita
(probabilmente i cartoni animati contano in base 8, e le scimmie quadrumani in base 20), e
le espansioni con virgola si possono fare in ogni base: vedi A.1.10
CAPITOLO 1. INSIEMI NUMERICI E FUNZIONI.
6
1.1.4.4 (Non completezze). L’insieme Q con le due operazioni, l’ordine e le loro proprietà
si dice un campo (ordinato). Esso è tuttavia incompleto in vari sensi: per esempio non tutti i
polinomi a coefficienti in Q hanno radici in Q (si dice che non è algebricamente chiuso), altro
esempio se scriviamo Q = A ∪ B con A 6 B (ogni elemento di A minore di ogni elemento di
B), non è detto che esista un elemento separatore tra A e B (si dice che non è completo per
l’ordine).
1.1.4.5 (Radici). Mostriamo per esempio che Q non ha la radice quadrata di 2, ovvero non
possiede alcun x tale che x2 = 2. Infatti, se cosı̀ fosse sarebbe x = p/q con p, q coprimi. Ma
allora da p2 = 2q 2 vediamo che 2 divide p, quindi 4 divide p2 , dunque 4 divide 2q 2 , ma allora
2 divide q, assurdo perché p e q erano coprimi! Questo era il grande segreto dei Pitagorici:
la diagonale del quadrato non è commensurabile con il lato.
1.1.5
Numeri reali.
1.1.5.1 (Numeri reali). L’insieme dei numeri reali si indica con
R = {espansioni decimali arbitrarie}
Tra i suoi elementi sappiamo fare la somma +, la differenza −, il prodotto ·, il quoziente /,
e conosciamo un ordine naturale 6.
Possiamo definire il valore assoluto, o modulo, come
(
x
se x > 0
|x| =
−x se x 6 0
e verificare facilmente che |x| = 0 se e solo se x = 0, |xy| = |x||y| (moltiplicatività), |x + y| 6
|x| + |y| (subadditività).
1.1.5.2 (Approssimazione con numeri razionali). Nessuna delle operazioni in realtà
è facile da definire in R, e lo si fa (sia definizione che calcolo) mediante “approssimazione
con numeri razionali”: per ogni numero reale r ∈ R e per ogni naturale n ∈ N possiamo
trovare numeri razionali che “distano da r meno di 10−n ”: basta troncare opportunamente
lo sviluppo decimale di r.
1.1.5.3 (Completezza per l’ordine (Dedekind)). Vi sono vari modi per esprimere il
fatto che R contrariamente a Q è completo per l’ordine, e questa proprietà permette di
definire in R molte operazioni (radici, potenze, esponenziali, logaritmi, ecc.) non definite
nell’insieme Q.
Il modo più semplice è di dire che ogni decomposizione di R in due insiemi uno maggiore
dell’altro (nel senso dell’ordine: gli elementi dell’uno sono tutti maggiori o uguali degli
elementi dell’altro) ammette un elemento separatore.
Un modo equivalente è di dire che ogni insieme superiormente limitato ammette estremo
superiore (che, se esiste, per definizione è il minimo dei maggioranti).
1.1.5.4 (Definizione di potenze, radici, ecc.). La proprietà precedente permette di
definire in R molte costruzioni impossibili in Q.
Per esempio, per definire le radici n-esime di un numero x ∈ R con x > 0 possiamo
procedere cosı̀: consideriamo A l’insieme dei razionali negativi e di quelli positivi a tali che
an < x, B l’insieme dei razionali positivi b tali che bn 6 x; si vede subito che A 6 B e
l’unione dà √
Q: quindi esiste un unico numero reale (positivo) che separa i due insiemi, e lo
chiamiamo n x.
Altro esempio, per definire le potenze ad esponente reale di numeri positivi, si approssima
l’esponente con due classi di numeri razionali.
1.1.5.5 (Non chiusura algebrica). Resta il problema in R che non tutti i polinomi reali
hanno radici: essendo un campo ordinato, tutti i quadrati sono positivi, e quindi i numeri
negativi non possono avere radici quadrate in R.
CAPITOLO 1. INSIEMI NUMERICI E FUNZIONI.
7
1.1.5.6 (Numeri algebrici e trascendenti). Ne approfittiamo per ricordare che i numeri
reali possono dividersi in due tipi a seconda che siano zeri di qualche polinomio a coefficienti
razionali (o interi) e allora si dicono algebrici, oppure no e allora si dicono trascendenti.
Dimostrare che un numero è trascendente (per esempio e, π) è estremamente difficile, ma in
qualche senso ci sono molti più numeri trascendenti che algebrici!
1.1.5.7 (Equazioni e disequazioni). Daremo per scontato che il lettore abbia acquisito
le competenze per risolvere facili tipi di equazioni e disequazioni in R, per esempio A.2.2 e
A.2.3.
1.1.6
Numeri complessi.
1.1.6.1 (Problema della radice di −1). Come appena detto, −1 non può avere radici
quadrate in R. Tuttavia è possibile aggiungere ad R un elemento immaginario i tale che i2 =
−1, definire nell’insieme esteso le operazioni di somma e prodotto ottenendo un sovrainsieme
che è ancora un campo, completo e algebricamente chiuso, ma naturalmente non ordinato
(se chiediamo che l’ordine rispetti le operazioni).
1.1.6.2 (Numeri complessi (forma algebrica)). L’insieme dei numeri complessi si indica
con
C = {z = a + ib : a, b ∈ R}
Tra i suoi elementi definiamo:
• la somma + (tramite (a + ib) + (a0 + ib0 ) = (a + a0 ) + i(b + b0 ), si tratta della classica
regola del parallelogramma),
• il prodotto · (tramite (a + ib) · (a0 + ib0 ) = (aa0 − bb0 ) + i(ab0 + a0 b), che siamo obbligati
ad usare perché valga la distributività: ne vedremo più avanti l’interpretazione geometrica).
Diciamo che a è la parte reale di z (scritto a = <z) e che b è la parte immaginaria di
z (scritto b = =z). Chiamiamo reali i numeri complessi con parte immaginaria nulla (è un
sottinsieme di C che possiamo identificare con R, con tutte le sue operazioni).
1.1.6.3 (Proprietà). Si verifica facilmente che C ha tutte le proprietà di R riguardo alle
operazioni d somma e prodotto, non naturalmente per l’ordine. Per esempio, 0+i0 è elemento
neutro della somma, 1 + i0 è elemento neutro del prodotto, entrambe le operazioni sono
commutative e associative, ecc.
1.1.6.4 (Coniugato). Il coniugato del numero complesso z = a + ib per definizione è il
numero z = a − ib. Naturalmente z = z, z + w = z + w, zw = z w, e vale che z = z se e solo
se z ∈ R.
1.1.6.5
√(Norma). La norma di un numero complesso z = a + ib è per definizione |z| =
√
zz = a2 + b2 , numero reale non negativo. Si osservi che |z| = 0 se e solo se z = 0, che
|zz 0 | = |z| |z 0 | (moltiplicatività, facile) e |z + z 0 | 6 |z| + |z 0 | (subadditività, si può controllare
a mano, ma la vedremo più in generale in geometria).
1.1.6.6 (Inversi). L’inverso moltiplicativo di z = a + ib è il numero complesso dato da
z/|z|2 = (a − ib)/(a2 + b2 ), come si controlla subito
1.1.6.7 (Piano di Gauss). Spesso conviene rappresentare i numeri complessi come coppie
di numeri reali e usare il piano cartesiano (detto piano di Gauss, quando si intende che
rappresenti i numeri complessi con le loro operazioni). Allora la somma dei numeri complessi
corrisponde alla somma di vettori del piano, mentre il prodotto ha una interpretazione più
complicata per la quale introduciamo la forma trigonometrica dei numeri complessi.
1.1.6.8 (Argomento). Se un numero complesso w ha modulo 1, allora appartiene al cerchio
unitario del piano di Gauss, e si scrive unicamente w = cos(θ) + i sin(θ) dove θ ∈ [0, 2π[ si
dice argomento di w, ed è l’angolo che w forma con l’asse reale.
Per ogni numero complesso z non nullo definiamo allora il suo argomento come quello di
z/|z| (che è numero complesso di modulo 1).
CAPITOLO 1. INSIEMI NUMERICI E FUNZIONI.
8
1.1.6.9 (Numeri complessi (forma trigonometrica)). Dunque ogni z ∈ C non nullo
è determinato da norma e argomento nel modo seguente: z = ρ(cos(θ) + i sin(θ)) con ρ =
|z| ∈ R>0 e θ ∈ [0, 2π[. Questa si dice la forma trigonometrica di z (corrisponde ad usare
coordinate polari nel piano cartesiano).
La forma trigonometrica permette di capire geometricamente l’operazione di moltiplicazione:
zz 0 = ρ(cos(θ) + i sin(θ))ρ0 (cos(θ0 ) + i sin(θ0 ))
= ρρ0 (cos(θ) cos(θ0 ) − sin(θ) sin(θ0 )) + i(sin(θ) cos(θ0 ) + cos(θ) sin(θ0 ))
= ρρ0 cos(θ + θ0 ) + i sin(θ + θ0 )
da cui si vede che il prodotto è il numero complesso di norma il prodotto di quelli dati, e di
argomento la somma di quelli dati.
In particolare, moltiplicare un numero z per un numero unitario w significa ruotare z
dell’argomento di w.
0
z + z 0 = (x+x0 ) + i(y+y 0 )
z = x+iy = %(cos ϑ+i sin ϑ) = %eiϑ
p
x + iy = z
% = x2 + y 2
y = % sin ϑ
zz 0 = %%0 ei(ϑ+ϑ )
z = %eiϑ
ϑ = arctan(y/x)
z 0 = x0 + iy 0
0
z 0 = %0 eiϑ
x = % cos ϑ
rappresentazioni cartesiana
trigonometrica ed esponenziale
dei numeri complessi
somma
di numeri complessi
prodotto
di numeri complessi
1.1.6.10 (Radici (formule di De Moivre)). La scrittura trigonometrica permette un
facile calcolo delle radici n-esime di un numero complesso.
Si osservi prima di tutto che elevare alla potenza n è molto facile: se z = ρ(cos(θ)+i sin(θ))
allora z n = ρn (cos(nθ) + i sin(nθ)). Anche nei disegni:
z2
z2
3
z
z4
z5 6
z
z3
z
z4
z
z2
z
z4
z5
z5
z6
potenze
di numeri complessi
di modulo < 1
z3
potenze
di numeri complessi
di modulo > 1
potenze
di numeri complessi
di modulo = 1
z6
Se ora vogliamo trovare tutti i v = σ(cos(η) + i sin(η)) tali che v n = z basta impostare
σ (cos(nη) + i sin(nη)) = ρ(cos(θ) + i sin(θ)), da cui si trova:
√
• modulo σ n = ρ, quindi σ = n ρ (numeri reali positivi);
• argomento nη = θ + 2kπ, da cui η = nθ + 2 nk π per k = 0, 1, . . . , n − 1.
Quindi ogni numero non nullo ha esattamente n radici n-esime (sono gli zeri del polinomio
xn = z, che ha grado n), e si trovano da una data ruotando di 2π/n per n − 1 volte.
n
CAPITOLO 1. INSIEMI NUMERICI E FUNZIONI.
9
Per esempio si osservi che le radici complesse dell’unità si dispongono nel piano di Gauss
come i vertici del poligono regolare con n lati (un vertice in 1).
z=e2πi/4 =i
z=e2πi/3
z=e2πi/5
z2
z=e2πi/6
z2
z 3 =1 z 2 = − 1
z 5 =1 z 3
z 4 =1
z3
z2
3
n=3
n=4
z =−i
z 6 =1
z4
z4
n=5
z5
n=6
Si capiscano anche i disegni delle radici di −1 e di i:
n=2
n=3
n=4
n=2
n=3
n=4
n=5
n=6
n=6
n=5
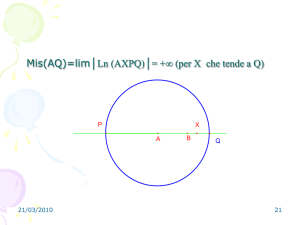
L’immagine di copertina disegna le radici n-esime per n 6 90 dei numeri 49i e i/49.
1.1.6.11 (Teorema fondamentale dell’algebra). È vero, ma assai difficile da dimostrare, che il campo dei numeri complessi è algebricamente chiuso, cioè che ogni polinomio a
coefficienti complessi (in particolare polinomi reali) ha una a dunque tutte le sue radici in C.
È importante osservare che per i numeri reali questo significa che: i polinomi reali irriducibili sono di primo grado, oppure di secondo grado senza radici reali (dunque con due
radici complesse, una coniugata dell’altra, come si vede subito dalla formula risolutiva delle
equazioni di secondo grado). Infatti, se un polinomio reale ha una radice complessa, si vede
subito che anche la coniugata è una radice del polinomio, e che il prodotto (X − z)(X − z)
è un polinomio reale per ogni z ∈ C (infatti è X 2 − 2<(z)X + |z|2 ).
1.1.6.12 (Formule trigonometriche). Vale la pena di osservare che i numeri complessi
permettono di ottenere facilmente formule di addizione o moltiplicazione di angoli per le
funzioni trigono: basta usare lo sviluppo del binomio, e poi separare parte reale e parte
immaginaria. Per esempio dalla formula per z 3 otteniamo
cos(3θ) + i sin(3θ) = (cos(θ) + i sin(θ))3
= cos3 (θ) + 3i cos2 (θ) sin(θ) − 3 cos(θ) sin2 (θ) − i sin3 (θ)
da cui cos(3θ) = cos3 (θ) − 3 cos(θ) sin2 (θ) = 4 cos3 (θ) − 3 cos(θ) (parte reale) e poi sin(3θ) =
3 cos2 (θ) sin(θ) − sin3 (θ) (si possono poi migliorare usando la relazione fondamentale).
1.1.6.13 (Numeri complessi (forma esponenziale)). Si rivela molto utile (ma all’inizio
sembra un trucco) introdurre la seguente definizione per ogni numero complesso unitario:
cos(θ)+i sin(θ) = eiθ . Allora ogni numero complesso z si scrive nella forma ρeiθ , e si scrivono
facilmente:
0
0
• il prodotto ρeiθ ρ0 eiθ = (ρρ0 )ei(θ+θ ) ,
iθ n
n inθ
• le potenze (ρe ) = ρ e ,
√
• le radici n-esime di ρeiθ sono n ρei(θ+2πk)/n per k = 0, 1, . . . , n − 1.
CAPITOLO 1. INSIEMI NUMERICI E FUNZIONI.
10
Non è possibile non ricordare qui la formula
eiπ + 1 = 0
che lega tra loro le più importanti costanti numeriche 0, 1, e, π, i.
1.1.6.14 (logaritmi complessi). Il problema del logaritmo è sempre quello, dato un numero z = ρeiθ ∈ C trovare gli eventuali numeri v = a + ib ∈ C tali che ev = z; tali numeri
se esistono si dicono logaritmi (in base e) di z. Impostando l’equazione ea+ib = ρeiθ si ottiene ea eib = ρeiθ , da cui ea = ρ e b = θ + 2kπ per k ∈ Z. Quindi ogni numero complesso
non nullo ha infiniti logaritmi, dovuto alla periodicità trigonometrica e sono della forma
v = log ρ + i(θ + 2kπ).
Chiamiamo logaritmo principale quello con parte immaginaria compresa in [0, 2π[. Per
esempio il logaritmo principale di −1 è iπ, cioè eiπ = −1.
1.1.6.15 (potenze qualsiasi). Avendo a disposizione i logaritmi, possiamo definire le potenze di esponente qualsiasi: ma si tratta, come per i logaritmi, di famiglie di numeri (ma
chiamiamo potenza principale quella determinata dal logaritmo principale).
La definizione è quella ovvia: z v = ev log z .
Per esempio la potenza principale ii vale e−π/2 .
Esempi ed esercizi sui numeri complessi si trovano in A.1.11
CAPITOLO 1. INSIEMI NUMERICI E FUNZIONI.
1.2
11
Funzioni.
Le funzioni sono un tipo particolare di relazioni, in cui ogni elemento del primo insieme
compare una unica volta. Si possono vedere quindi come una legge che permette di associare
ad ogni elemento di un insieme un ben determinanato elemento del secondo.
1.2.1
Funzioni e loro proprietà.
Definizione 1.2.1.1 (funzioni). Dati due insiemi X e Y , una funzione tra f : X → Y (da
X a Y ) è una regola che assegna ad ogni x ∈ X un unico f (x) ∈ Y . L’insieme X di dice
il dominio, e Y si dice il codominio della funzione. L’insieme f (X) = {f (x) : x ∈ X} è un
sottinsieme di Y che si chiama l’immagine di f (o di X tramite f ).
1.2.1.2 (grafico). Il grafico di una funzione è la relazione associata, cioè il sottinsieme del
prodotto cartesiano X × Y formato dalle coppie (x, f (x)) al variare di x ∈ X. Spesso il
grafico è la rappresentazione più semplice per la funzione stessa, se è possibile disegnarlo.
1.2.1.3 (immagini inverse). Dato un elemento y del codominio, la sua immagine inversa
(o controimmagine) tramite f è l’insieme degli elementi x del dominio tali che f (x) = y.
Dato un sottinsieme V del codominio, la sua immagine inversa (o controimmagine) tramite
f è l’insieme degli elementi x del dominio tali che f (x) ∈ V .
Che relazioni vi sono tra immagini, immagini inverse e le operazioni insiemistiche (unione,
intersezione, complemento)?
1.2.1.4 (iniettività). Una funzione si dice iniettiva se ogni elemento del codominio è visto
da al più un elemento del dominio, cioè se f (x) = f (y) implica x = y (o anche x 6= y implica
f (x) 6= f (y)). Ciò significa che le immagini inverse di elementi del codominio sono vuote o
singoletti.
1.2.1.5 (suriettività). Una funzione si dice suriettiva se ogni elemento del codominio è
visto da almeno un elemento del dominio, cioè se f (X) = Y (l’immagine coincide con il
codominio). Ciò significa che le immagini inverse di elementi del codominio non sono mai
vuote.
1.2.1.6 (biiettività). Una funzione si dice biiettiva se è sia iniettiva sia suriettiva.
1.2.1.7 (funzione identica). Per ogni insieme X, la mappa che ad ogni x associa x stesso
è una funzione biiettiva X → X che si chiama l’identità di X e si indica con idX .
1.2.1.8 (composizione). Date due funzioni f : X → Y e g : Y → Z, si definisce la funzione
composta g ◦ f : X → Z tramite g ◦ f (x) = g(f (x)).
1.2.1.9 (proprietà della composizione). Abbiamo come elementi neutri le identità: f ◦
idX = f = idY ◦ f .
Comporre è operazione associativa: h ◦ (g ◦ f ) = (h ◦ g) ◦ f (questo significa: quando una
delle composizioni è definita, allora anche l’altra lo è e sono uguali).
La composta di due mappe iniettive è iniettiva; se una composta è iniettiva, la prima
mappa lo è.
La composta di due mappe suriettive è suriettiva; se una composta è suriettiva, la seconda
mappa lo è.
La composta di due mappe biiettive è biiettiva; se una composta è biiettiva, la prima
mappa è iniettiva, la seconda suriettiva (ma in generale non biiettive!).
1.2.1.10. Nota: non ha senso chiedersi di solito se la composizione sia commutativa, perché una composizione potrebbe essere definita, e l’altra no. Quando anche siano entrambe
definite, di solito f ◦ g e g ◦ f non sono uguali in generale. Vedi per esempi A.1.12.
CAPITOLO 1. INSIEMI NUMERICI E FUNZIONI.
12
1.2.1.11 (inverse destre e sinistre, funzioni invertibili). Una funzione f : X → Y si
dice invertibile a destra, o che ammette una inversa destra (risp. a sinistra, o che ammette
una inversa a sinistra), se esiste una funzione g : Y → X tale che f ◦ g = idY (risp.
g ◦ f = idX ), e in tal caso è automaticamente suriettiva (risp. iniettiva).
Una funizione si dice invertibile se esiste una funzione g : Y → X tale che f ◦ g = idY e
g ◦ f = idX (cioè è una inversa sia destra che sinistra). In tal caso la funzione g di chiama
inversa di f , è unica (cosa che può non capitare alle inverse destre o sinistre) e merita il nome
di f −1 . Quindi f −1 : Y → X è la funzione definita da f −1 (y) = x se e solo se f (x) = y.
È importante notare che se una funzione ammette sia inverse destra sia inverse sinistre,
allora coincidono tra di loro e la funzione è invertibile: infatti da f ◦ g = idY e h ◦ f = idX
si ha g = idX ◦ g = h ◦ f ◦ g = h ◦ idY = h.
Infine è una facile ma importante osservazione che una funzione è invertibile (risp. a
destra, risp. a sinistra) se e solo se è biiettiva (risp. suriettiva, risp. iniettiva).
1.2.1.12 (Proprietà dell’inverse). Naturalmente, la funzione identica di ogni insieme in
sè è una biiezione con inversa sè stessa. Inoltre, se due funzioni sono componibili ed entrambe
invertibili, allora la funzione composta è invertibile, e vale che (g ◦f )−1 = f −1 ◦g −1 (a parole:
l’inversa delle composte è la composta delle inverse nell’ordine inverso).
1.2.2
Limiti.
Si può parlare di limite di una funzione in un punto se per entrambi gli insiemi (dominio e
codominio) abbiamo specificato per ogni punto la nozione di intorni di quel punto, cioè di
che cosa significa essere “vicini” a quel punto.
1.2.2.1 (Intorni di un punto). L’insieme degli intorni di un punto in X dev’essere un
insieme di sottinsiemi di X che soddisfa ad alcune facili proprietà: ogni intorno di x contiene
x, l’intersezione di due intorni è ancora un intorno, ogni insieme contenente un intorno è
ancora un intorno (di solito si dice che gli intorni di un punto contengono il punto e sono
stabili per intersezioni finite e sovrainsiemi).
Spesso si chiamano intorni bucati di x gli intorni a cui viene tolto x stesso. Un punto si
dice isolato se ha intorni che contengono solo lui stesso, di accumulazione altrimenti (significa
che ogni intorno di x contiene punti di X diversi da x, cioè nessun intorno bucato è vuoto).
1.2.2.2 (Caso di spazi metrici). Il caso più importante in cui sappiamo definire gli intorni
di un punto è quello di insiemi dotati di una metrica, cioè un modo per misurare le distanze
tra i punti. Una metrica è una funzione d : X × X → R>0 tale che
• d(x, y) = 0 se e solo se x = y (punti diversi hanno distanza positiva),
• d(x, y) = d(y, x) (simmetria), e
• d(x, y) 6 d(x, z) + d(z, y) (disuguaglianza triangolare).
In tal caso definiamo le palle centrate in un punto x e di raggio ε come i punti che distano
da x meno di ε. Gli intorni di x sono tutti gli insiemi contenenti una palla centrata in x. I
casi di R e C sono particolari spazi metrici usando d(x, y) = |x − y|. Anche gli spazi numerici
Rn sono metrici.
1.2.2.3 (metrica del taxi). Come esempio un po’ esotico, si consideri il piano R2 con la
distanza definita (invece che dalla formula euclidea) come d((x1 , y1 ), (x2 , y2 )) = |x2 − x1 | +
|y2 − y1 |, come se si potessero percorrere solo strade verticali e orizzontali. Che forma hanno
le palle?
1.2.2.4 (metrica del max). Come altro esempio esotico, si consideri il piano R2 con la
distanza definita come d((x1 , y1 ), (x2 , y2 )) = max(|x2 − x1 |, |y2 − y1 |). Che forma hanno le
palle?
1.2.2.5 (Intorni in R). Per x ∈ R definiamo i suoi intorni come un qualsiasi sottinsieme di
R che contenga un intervallo ]x + ε, x − ε[ centrato in x e ampiezza ε > 0. Parleremo anche
di intorni destri (risp. sinistri) per intendere insiemi che contengono intervalli [x, x + ε[ (risp.
]x − ε, x]) per qualche ε > 0.
CAPITOLO 1. INSIEMI NUMERICI E FUNZIONI.
13
Sarà importante anche definire degli intorni di punti che non stanno in R, e in particolare
dei seguenti:
intorni di ∞: sono i sottinsiemi di R del tipo {[−M, M ] per qualche M > 0;
intorni di +∞: sono i sottinsiemi di R del tipo ]M, +∞[ per qualche M ∈ R;
intorni di −∞: sono i sottinsiemi di R del tipo ] − ∞, M [ per qualche M ∈ R;
(dovrebbe essere chiaro il significato intuitivo: per esempio intorni di +∞ sono tutte le
semirette positive).
1.2.2.6 (Intorni in C). Per z ∈ C definiamo i suoi intorni come un qualsiasi sottinsieme di
C che contenga un disco di raggio ε > 0 centrato in z.
Siccome C non è ordinato, possiamo definire solo gli intorni di ∞ (senza segno!) dicendo
che sono gli insiemi contenenti un complementare di un disco centrato in 0.
1.2.2.7 (Intorni in Z e in N). Se ora definiamo gli intorni di punti di un punto in Z come
le intersezioni con Z dei suoi intorni in R (o in C) succede una cosa strana: ogni punto (in
quanto insieme formato da un solo elemento) è intorno di sè stesso, e quindi ogni insieme
contenente il punto è intorno del punto: si dice che i punti sono isolati.
Ciò però non succede per gli infiniti: per esempio gli intorni di +∞ in N sono gli insiemi
contenenti tutti i numeri da un certo M in poi.
Definizione 1.2.2.8 (generale di limite). Data una funzione f : Xr{x0 } → Y , e supponiamo che nei due spazi sia definito per ogni punto l’insieme dei suoi intorni, diciamo che
y0 ∈ Y è il limite di f intorno a x0 ∈ X e scriviamo
lim f (x) = y0
x→x0
se vale la seguente proprietà: per ogni intorno V di y0 esiste un intorno U di x0 tale che
f (U r{x0 }) ⊆ V .
1.2.2.9 (unicità). Se supponiamo che x0 non sia isolato nel dominio di f , e che Y sia
spazio metrico, dalla definizione segue subito che il limite, se esiste, è unico: infatti due
limiti devono avere distanza minore di qualunque ε > 0.
1.2.2.10. Si osservi che la definizione funziona anche per gli “elementi” come ∞, ±∞ che
non appartengono all’insieme ma per i quali è definito l’insieme degli intorni in X (o Y ).
1.2.2.11. Si osservi che la definizione non richiede che la funzione sia definita in x0 .
1.2.2.12. Il significato intuitivo della definizione è: “punti arbitrariamente vicini a x0 (cioè
in intorni sempre più piccoli) devono essere mandati in punti vicini a y0 ”, ed è stata una
grande conquista della matematica capire che questa condizione si scrive in termini di intorni
(e di antimmagini, in effetti: si può esprimere dicendo che per ogni intorno di y0 la sua
antimmagine tramite f è un intorno, eventualmente bucato, di x0 ).
Si osservi che è invece completamente diverso chiedere che l’immagine di un intorno sia
un intorno; per esempio si consideri il caso del punto origine per la parabola.
1.2.2.13. La nozione di limite serve a rendere “esatto, preciso” il procedimento di approssimazione di “essere vicino a”, che al limite (quando esiste) diventa “essere uguale a”. In un
certo senso il calcolo dei limiti (e poi delle derivate e degli integrali) serve a rendere esatti i
calcoli approssimati.
1.2.3
Successioni.
Definizione 1.2.3.1 (successioni). Le successioni numeriche sono funzioni con dominio
N e codominio R (successioni a valori reali) oppure C (successioni a valori complessi). Di
solito invece di scrivere f : N → R e indicare con f (n) ∈ R l’immagine di n ∈ N, si usa
scrivere fn ∈ R e indicare con (fn )n∈N tutta la funzione.
CAPITOLO 1. INSIEMI NUMERICI E FUNZIONI.
14
1.2.3.2 (proprietà delle successioni). Una successione fn si dice:
• limitata superiormente se esiste M ∈ R tale che fn 6 M ;
• limitata inferiormente se esiste M ∈ R tale che fn > M ;
• limitata se esiste M ∈ R>0 tale che |fn | 6 M ;
Inoltre, rispetto alla crescenza, diremo che la successione è
• monotona crescente se n > m implica fn > fm ;
• monotona decrescente se n > m implica fn 6 fm ;
(si aggiunge l’aggettivo strettamente se possiamo usare le disuguaglianze strette).
1.2.3.3 (limite di una successione). Trattandosi di funzioni definite su N, l’unico “punto”
in cui ha senso calcolare il limite è ∞. La definizione in questo caso diventa: il limite di fn
per n → ∞ è ` se per ogni intorno V di ` si ha un nV ∈ N tale che fn ∈ V per ogni n > nV
(si dice che per ogni V la successione prende definitivamente valori in V ; “definitivamente”
significa da un certo punto in poi, e descrive esattamente gli intorni di ∞).
Si scrive lim fn = ` o anche fn → ` (sottintendendo per n → ∞).
n→∞
Si noti che ` può essere in R (in questo caso la successione si dice convergente, e il suo
grafico si stringe attorno alla retta y = y0 ) oppure ∞ o ±∞ (e allora la successione si dice
divergente; cosa significa per il grafico?).
Si osservi anche che il comportamento del limite di una successione dipende solo da quello
che succede “da un certo punto in poi”, e quindi possiamo alterare a piacere una qualsiasi
parte iniziale della successione senza alterare il limite.
1.2.3.4 (successioni irregolari). Una successione si dice irregolare se non è convergente
né divergente, cioè se non esiste il limite. Per esempio fn = (−1)n è irregolare.
1.2.3.5 (carattere). Chiamiamo carattere di una serie la sua proprietà di convergenza
(irregolare, convergente, divergente).
1.2.3.6 (successioni monotone). Una successione monotona (crescente o decrescente)
ammette sempre limite (eventualmente ±∞), uguale al sup o all’inf rispettivamente, quindi
non è mai irregolare.
1.2.3.7 (successioni infinitesime e infinite). Una successione si dice infinitesima (risp.
infinita)√se il suo limite è zero (risp. +∞). Per esempio le successioni fn = 1/n, fn = 1/n2 ,
fn = 1/ n, fn = 1/ log n sono infinitesime (le loro inverse sono infinite).
1.2.3.8 (successioni e criterio di Cauchy). Una successione fn si dice di Cauchy se per
ogni p la successione xn+p −xn è infinitesima. Si vede subito che una successione convergente
è di Cauchy (perché (xn+p − xn ) → (x − x) = 0).
Il criterio di Cauchy afferma che una successione è convergente (in R o in C) se e solo se
è di Cauchy. Si tratta di un’altra caratterizzazione della completezza di R, e non è facile.
1.2.3.9 (proprietà algebriche dei limiti). Siccome ci occupiamo di successioni a valori
numerici, è utile vedere il comportamento dei limiti rispetto alle operazioni usuali: in linea
di massima potremmo dire che il limite commuta con le operazioni algebriche.
Siano fn → a, gn → b successioni convergenti a limiti finiti; allora:
• somma, differenza: fn ± gn → a ± b;
• prodotto: fn gn → ab ;
• quoziente: fn /gn → a/b se gn , b 6= 0;
• potenza: fn gn → ab se fn , a > 0;
• confronto: se fn 6 gn (basta anche definitivamente) allora a 6 b;
• carabinieri: se fn 6 hn 6 gn (basta anche definitivamente) e a = b allora hn → a;
Quando i limiti esistono ma non sono finiti, le regole si possono applicare in certi casi, ma
non sempre; per esempio:
• il prodotto di successioni limitate per infinitesime è infinitesimo ((< ∞) × 0 = 0),
• il prodotto di successioni illimitate per illimitate è illimitato (∞ × ∞ = ∞),
• e altri: (±∞) + (±∞) = ±∞, (< ∞) + ∞ = ∞, ∞/(< ∞) = ∞, ecc.
CAPITOLO 1. INSIEMI NUMERICI E FUNZIONI.
15
1.2.3.10 (forme indeterminate). Ma alcuni casi danno luogo a successioni di cui non si
può a priori decidere il carattere, e per questo si dicono casi indeterminati (ma naturalmente
in ogni singola situazione si può decidere cosa succede); essi sono:
• ∞ − ∞ : usando le successioni n + fn e n (con fn limitata inferiormente), si vede che
la successione differenza assume il carattere di fn , che può essere scelto a piacere;
• 0 · ∞ : usando le successioni n + fn e 1/n (con fn limitata inferiormente), si vede che
la successione prodotto assume il carattere di fn /n, che può essere scelto a piacere;
• ∞/∞ : è come il caso precedente;
• 0/0 : è come il caso precedente;
e usando la regola ab = eb log a otteniamo ancora:
• ∞0 e 1∞ : corrispondono al caso 0 · ∞;
• 00 : corrisponde al caso 0 · (−∞);
in tutti questi casi bisogna studiare accuratamente le successioni per determinarne il carattere.
1.2.3.11 (limiti fondamentali). Vi sono alcuni limiti fondamentali da conoscere a memoria:
successioni geometriche: sono le successioni del tipo fn = q n per q ∈ R fissato; ha i
seguenti caratteri:
se q > 1
+∞
1
se q = 1
qn → 0
se |q| < 1
irregolare se q = −1
∞
se q < −1
(si noti che per q > 0 si tratta di successioni monotone).
successioni esponenziali: sono le successioni del tipo fn = nα per α ∈ R fissato; ha i
seguenti caratteri:
+∞ se α > 0
nα → 1
se α = 0
0
se α < 0
(per α = 0 è successione costante, in ogni caso monotona).
successione di Nepero: è la successione che descrive fenomeni di crescita di una entità
che ad ogni passo varia in proporzione allo stato di quel momento (sistemi biologici, interessi
su capitali (!), decadimenti radioattivi): per esempio partendo da un valore C e variando
di 1 + q in un fissato periodo, ma supponendo che la variazione sia continua, dovremmo
calcolare (1 + nq )n C (abbiamo diviso il tempo in n intervalli uguali) e poi far tendere n a
infinito.
Si è ridotti quindi al limite della successione
n
1
1+
→ e.
n
CAPITOLO 1. INSIEMI NUMERICI E FUNZIONI.
16
La successione presenta una indeterminazione del tipo 1∞ , ma è convergente perché limitata e monotona crescente (non è banale: vedi A.1.13), e il numero e = 2, 7182818284 · · ·
(trascendente) viene approssimato velocemente.
Vi sono molte variazioni su Nepero, tra le quali segnaliamo:
n
n
q n
n
n+p
→ e−q
→ ep−q .
1+
→ eq
n
n+q
n+q
rapporti di polinomi: usando la tecnica di raccogliere la potenza più alta che si
presenta, si può facilmente calcolare il limite di rapporti di polinomi in n
+∞ se grado(P ) è maggiore del grado(Q)
P (n)
→ ab
se grado(P ) è uguale al grado(Q)
Q(n)
0
se grado(P ) è minore del grado(Q)
(se a, b sono i coefficienti dei termini dominanti di P, Q risp.) o anche di espressioni che
coinvolgono potenze e radici.
Si veda anche A.1.15 per qualche esercizio sui limiti di successioni.
1.2.3.12 (confronti e stime asintotiche). Il fatto che due successioni siano entrambe
divergenti, o entrambe infinitesime non dice molto sui loro caratteri, che in effetti potrebbero
essere molto diversi tra loro. Per confrontare tali caratteri, conviene studiare il quoziente
delle due successioni, che si può fare se almeno una è (definitivamente) non nulla. Possiamo
avere i seguenti casi: per fn e gn entrambe infinite o infinitesime
0
diremo che f ha ordine (di infinito/infinitesimo) minore di g
` 6= 0 finito diremo che f e g hanno stesso ordine (di infinito/infinitesimo)
fn
→
gn
∞
diremo che f ha ordine (di infinito/infinitesimo) maggiore di g
irregolare
non diremo nulla
Per due successioni qualsiasi, la seconda definitivamente non nulla, si dice che sono asintotiche se la successione quoziente ha limite 1, nel qual caso le due successioni hanno lo stesso
limite.
È molto utile, spesso, confrontare due successioni, una nota e una meno: se il limite del
quoziente è finito e non nullo possiamo decidere del carattere e del limite di una noti quello
dell’altra.
Vi sono alcuni confronti molto utili:
loga n
logaritmi/potenze: per ogni a > 1 e ogni α > 0 abbiamo
→ 0 (ogni potenza
nα
diverge più velocemente di ogni logaritmo);
nα
potenze/esponenziali:
per ogni a > 1 e ogni α > 0 abbiamo n → 0 (ogni
a
esponenziale diverge più velocemente di ogni potenza).
Il secondo confronto è facile da verificare (basta fare il rapporto tra elementi successivi),
ma vedremo entrambi usando la regola di De L’Hôpital. In alternativa si possono verificare
usando i criteri di Cesaro, che in un certo senso sono il corrispondente per le successioni della
regola di De L’Hôpital: vedi A.1.14
1.2.4
Serie.
Lo studio delle serie permette di estendere l’operazione di somma ad un numero infinito di
addendi sotto opportune condizioni. Per esempio è ragionevole, pensando alla divisione in
tratti di un segmento di lunghezza 2, aspettarsi che i numeri 1, 12 , 14 , 18 , . . . ammettano una
somma pari a 2.
CAPITOLO 1. INSIEMI NUMERICI E FUNZIONI.
17
Definizione 1.2.4.1 (serie). Data una successione reale o complessa (ak ), diciamo serie
associata l’espressione
∞
X
ak
k=0
(gli ak si dicono i termini della serie) e chiamiamo somme parziali della serie i termini
sn =
n
X
ak
k=0
che a loro volta formano una successione sn (successione delle somme parziali). I termini
ak si ottengono come differenza sk − sk−1 .
1.2.4.2 (carattere di convergenza). Una serie si dice convergente, divergente, irregolare a
seconda che la successone delle somme parziali sia convergente con limite finito (che, quando
esiste, si chiama la somma della serie), divergente, irregolare. Si chiama carattere di una
serie la sua caratteristica di essere convergente, divergente o irregolare.
È chiaro che il carattere di una serie non è modificato se si altera un numero finito dei
suoi termini.
1.2.4.3 (convergente implica infinitesima). Se una serie converge, allora il termine
generale è infinitesimo, cioè il limite della successione dei termini è zero. Infatti ak =
sk − sk−1 → s − s = 0 (per k → ∞, abbiamo chiamato s la somma).
Il viceversa però è falso: esistono serie infinitesime non convergenti, come vedremo negli
esempi successivi.
1.2.4.4 (criterio di Cauchy). Usando il criterio di Cauchy per la convergenza di successioni, si traduce subito per la convergenza di serie: una serie di termine generale ak è
convergente se e solo se per ogni p la successione |ak + · · · + ak+p | è infinitesima.
1.2.4.5 (esempi). serie geometrica: si chiama serie geometrica quella di termine generale
ak = q k con q ∈ R. Poiché le somme parziali sono date da
sn = 1 + q + q 2 + · · · + q n =
1 − q n+1
1−q
si vede subito il carattere a seconda dei valori di q:
1
se |q| < 1
n
1−q
X
k
q = +∞
se q > 1
k=0
irregolare se q 6 −1
(si osservi il diverso comportamento per valori positivi e negativi).
serie armonica: si chiama serie armonica quella di termine generale ak = k1 . Essa
è infinitesima ma divergente: si vedrà facilmente con il criterio integrale, ma si può capire
con un metodo elementare: i termini compresi tra 2−r (compreso) e 2−r−1 (escluso) hanno
somma maggiore di 1/2, quindi si stanno “sommando” infinite volte valori maggiori di 1/2...
1
serie di Mengoli: si chiama serie di Mengoli quella di termine generale ak = k(k+1)
. Si
tratta di un caso di serie “telescopica” in cui ogni termine sommato semplifica il precedente
1
1
e permette di calcolare esplicitamente le somme parziali: infatti k(k+1)
= k1 − k+1
da cui
sn =
1 1
−
1 2
+
1 1
−
2 3
+ ··· +
1
1
−
n n+1
=1−
e quindi la somma della serie è 1 (e la serie convergente).
serie armonica quadratica: è quella di termine generale ak =
(cambiando l’indice di 1) è minore di quella di Mengoli.
La serie di termine (−1)k è irregolare.
1
n+1
1
k2 .
Converge perché
CAPITOLO 1. INSIEMI NUMERICI E FUNZIONI.
18
1.2.4.6 (serie a termini non negativi). Se la serie ha termini non negativi, allora la
successione delle somme parziali è crescente, e dunque il limite coincide con l’estremo superiore: quindi è convergente o divergente (la conclusione sul carattere vale anche per serie
definitivamente a termini non negativi). Vi sono in questo caso vari criteri utili per capire il
carattere di convergenza.
criterio del confronto
serie con ak > bk > 0, risulta:
P
P (o di Gauss):
P se abbiamo dueP
se ak converge allora bk converge, se bk diverge allora ak diverge. Da questo segue
subito per esempio che la serie k1α con α 6 1 diverge (per confronto con la serie armonica)
e che per α > 2 converge (per confronto con la serie armonica quadratica); in realtà la serie
(detta armonica generalizzata, o delle potenze) converge se α > 1.
criterio asintotico: se due serie a termini non negativi hanno termini generali asintotici, allora hanno lo stesso carattere di convergenza (ma non lo stesso limite, di solito). Per
esempio, la serie di Mengoli e quella armonica quadratica hanno termini asintotici: la prima
converge a 1, l’altra a π 2 /6 (difficile!). Il criterio asintotico si verifica usando il criterio del
confronto.
criterio della radice (o di Cauchy):
se una serie di termini ak > 0 è tale che
√
k a
k → ` ∈ R allora essa converge se ` < 1, diverge se ` > 1, e non si può concludere nulla se
` = 1. Il criterio segue dai criteri precedenti, osservando che ak è asintotica a `k (confronto
con la serie geometrica). Per esempio possiamo determinare cosı̀ i caratteri delle serie (a/k)k ,
k α ak .
criterio del rapporto (o di D’Alambert): se una serie di termini ak > 0 è tale
che aak+1
→ ` ∈ R allora essa converge se ` < 1, diverge se ` > 1, e non si può concludere
k
nulla se ` = 1. Il criterio segue dai criteri precedenti, osservando che ak è asintotica a a0 `k
(confronto con la serie geometrica). Per esempio possiamo determinare cosı̀ i caratteri delle
serie k/ek , 1/k!, k k /k!.
1.2.4.7 (serie a termini alternati (Leibniz)). Data una serie con termini della forma
(−1)k ak con ak > 0, allora se ak è infinitesima decrescente, la serie converge a un limite ` ∈ R
tale che s2n+1 6 ` 6 s2n (le somme parziali dispari sono minoranti, quelle pari maggioranti),
e ` dista da una somma parziale meno del (modulo del) primo termine trascurato. Per
verificare l’enunciato, basta osservare che le somme parziali di indice dispari formano una
successione crescente e limitata (dal primo termine), e analogamente per gli indici pari.
Si vede cosı̀ che convergono le serie di termini (−1)k /k, (−1)k /k 2 , (−1)k log k.
1.2.4.8 (convergenza assoluta). Una serie di termini ak si dice assolutamente convergente
se la serie avente come termini i valori assoluti |ak | è convergente.
Si vede quasi subito che una serie assolutamente convergente è convergente.
Il viceversa in generale è falso: per esempio la serie armonica non è convergente, mentre
la serie di termine (−1)k /k è convergente per il criterio di Leibniz, quindi non assolutamente
convergente.
1.2.4.9 (serie di potenze). Intendiamo con serie di potenze le serie
∞
X
ak xk
k=0
con ak ∈ R e x ∈ R. Uno dei principali problemi è determinare per quali valori di x la serie
converge.
Raggio di convergenza: poniamo (se esiste il limite)
R=
lim
1
p
k
k→+∞
|ak |
allora: per |x| < R la serie di potenze converge assolutamente, per |x| > R la serie diverge,
mentre per |x| = R non si può dire a priori il carattere. Questo risultato si vede facilmente
con il criterio della radice.
CAPITOLO 1. INSIEMI NUMERICI E FUNZIONI.
19
Per esempio è facile determinare il raggio di convergenza delle serie di potenze kxk , xk /k k ,
x /k, xk /k!.
k
1.2.4.10 (criterio integrale). Anticipando la nozione di integrale (generalizzato), indichiamo solo che data una funzione reale continua f (x) definita almeno per x > 0, allora vale
che
Z +∞
∞
X
la serie
f (k) converge se e solo se l’integrale
f (x)dx converge
k=0
(si vede per confronto delle aree).
Vedi A.1.16 per alcuni esercizi sulle serie.
0
Capitolo 2
Calcolo in una variabile.
Lo studio scientifico dei vari fenomeni porta sempre, anche se qualche volta a torto, a rappresentare i dati reali tramite numeri e studiare le relazioni tra di essi in termini di leggi di
trasformazioni tra numeri. Le più semplici possibili di queste trasformazioni sono le funzioni di una variabile reale, a valori reali. Si studiano quindi approfonditamente le proprietà
di queste funzioni prima di passare a cose più complicate, tipo gli spazi numerici con n
coordinate (invece che 1), e funzioni tra questi (calcolo in più variabili).
2.1
2.1.1
Funzioni reali elementari.
Proprietà.
2.1.1.1 (dominio (di esistenza) e immagine). Mentre per definire una funzione bisognerebbe prime specificare dominio e codominio, nel caso di funzioni di una variabile reale
spesso si dà la funzione in termini di operazioni note e di funzioni elementari, e si intende
che è definita ovunque le operazioni e le funzioni abbiano significato. Quindi è un problema
trovare il dominio (di esistenza). Per esempio: se vi sono frazioni, il denominatore non deve
annullarsi, se vi sono logaritmi o potenze non intere l’argomento deve essere positivo, ecc.
Con immagine di una funzione reale si intende l’immagine in quanto funzione, ma talvolta
viene usato impropriamente come sinonimo il termine codominio.
2.1.1.2 (grafico). Il grafico di una funzione di variabile reale è un sottinsieme del piano
cartesiano, ed è il modo più immediato di rappresentare una funzione e di vederne alcune
proprietà.
Inoltre il grafico è spesso utile per ottenere qualitativamente altre funzioni: l’inversa moltiplicativa (dove non è nulla), l’inversa per composizione (se è invertibile, il grafico dell’inversa
è il simmetrico rispetto alla diagonale principale del grafico della funzione), sommare due
funzioni (basta sommare i due grafici), ecc.
2.1.1.3 (simmetrie). Una funzione si dice pari se f (−x) = f (x), dispari se f (−x) =
−f (x). Si vede dai grafici a seconda che sia simmetrico rispetto all’asse delle ordinate,
oppure simmetrico rispetto all’origine.
2.1.1.4 (monotonie). Una funzione si dice monotona crescente (risp. decrescente) se per
x 6 x0 si ha f (x) 6 f (x0 ) (risp. f (x) > f (x0 )). Si aggiunge l’aggettivo strettamente se la
proprietà vale con i segni < (risp. >).
2.1.1.5 (periodicità). Una funzione si dice periodica di periodo p > 0 se vale f (x + p) =
f (x) per ogni x in cui sia definita. È chiaro allora che una funzione periodica di periodo p si
conosce completamente quando la si conosca su un intervallo di ampiezza p, per esempio su
[0, p], oppure su [−p/2, p/2].
20
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
2.1.2
21
Potenze e radici.
2.1.2.1 (potenze intere). Le potenze xn con esponente intero sono definite per ogni valore della variabile
x (se n < 0 si definisce xn = (1/x)−n e non è definita in
0), e sono funzioni pari o dispari a seconda che l’esponente lo sia; crescenti per x 6 0, altrimenti de/crescenti
a seconda che n sia pari/dispari.
2.1.2.2 (radici). Le radici sono definite come funzioni
inverse per composizione delle potenze intere, nel dominio delle ascisse positive per esponenti pari. A parte
eventualmente il dominio di esistenza, si tratta delle
potenze del tipo x1/n . Sono crescenti ove definite.
xa
a=1 2 3 4 5
1 1 1 1
2 3 4 5
2.1.2.3 (potenze qualsiasi). Invece le potenze xα con esponente qualsiasi (razionale o
reale) sono definite solo per valori non negativi della x (altrimenti si ottengono uguaglianze
sgradevoli del tipo 3 = 91/2 = ((−3)2 )1/2 = (−3)2/2 = (−3)1 = −3). In ogni caso si
ottengono solo valori non negativi.
Per n = 0 è la funzione identicamente uguale ad 1, per n = 1 è la funzione identica x.
Per esponenti positivi sono funzioni crescenti, convesse o concave a seconda che l’esponente
sia maggiore o minore di 1.
Proprietà notevoli: xa xb = xa+b , (xa )b = xab .
2.1.3
Esponenziali e logaritmi.
2.1.3.1 (esponenziali). Per a > 0 definiamo l’esponenziale y = ax per ogni valore di x; assume solo valori
non negativi; naturalmente per a = 1 risulta la funzione
identicamente 1. Ha andamento crescente o decrescente a seconda che la base a sia maggiore o minore di 1,
convesso in ogni caso.
Proprietà notevoli: ax bx = (ab)x , (ax )y = axy . Cresce
o decresce più velocemente di qualunque potenza.
ax
a± =
2.1.3.2. Un caso speciale è l’esponenziale di base e, che avrà importanti proprietà rispetto
a derivazione e integrazione.
loga x
2.1.3.3 (logaritmi). Il logaritmo di base a > 0 e 6= 1 è la funzione
loga x inversa (per composizione) dell’esponenziale di base a; quindi è
definita solo per x > 0, come l’esponente da dare ad a per ottenere x:
per definizione, aloga x = x, e loga ax = x. Ha andamento crescente (e
concavo) o decrescente (e convesso) a seconda che la base a sia maggiore
o minore di 1.
Proprietà notevoli: loga (x) = loga (b) logb (x) (in particolare loga b logb a =
1), loga (xy) = loga (x)+loga (y), c loga b = loga bc . Cresce o decresce meno
velocemente di qualunque potenza.
2.1.3.4. Diremo logaritmo naturale quello di base e, e lo scriveremo log x
senza pedice.
3
2
2 3 4
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
2.1.4
22
Funzioni trigonometriche e inverse.
2.1.4.1 (angoli). Misureremo sempre gli angoli in radianti; ricordiamo solo che l’angolo
giro (360o ) misura 2π radianti, l’angolo piatto (180o ) misura π radianti, l’angolo retto (90o )
misura π/2 radianti.
2.1.4.2 (seno e coseno). Le funzioni seno e coseno possono essere introdotte in due contesti
e modi diversi: da un lato studiando i triangoli rettangoli, dall’altro studiando la circonferenza unitaria. Nel primo modo, si definisce come seno (risp. coseno) di un angolo il rapporto
tra il cateto opposto (risp. adiancente) all’angolo e l’ipotenusa in un qualsiasi triangolo
rettangolo che abbia quell’angolo in un vertice, e poi si estende la funzione ad ogni valore
reale oppurtunamente. Nel secondo modo concettualmente si “linearizza” la circonferenza
unitaria: seno e coseno sono rispettivamente ordinata ed ascissa del punto della circonferenza descritto dall’angolo di ampiezza data dalla variabile; con questa definizione si vede
chiaramente che sono funzioni periodiche di periodo 2π, con valori compresi nell’intervallo
[−1, 1], e che differiscono tra loro per una “traslazione” x in x + π/2 (rotazione di angolo
retto sulla circonferenza).
Andamento del grafico:
sin x
x
π
4
π
2
π
2π
cos x
Proprietà notevoli: lo studente dovrebbe conoscere i risultati elementari di trigonometria,
che riportiamo con qualche spiegazione essenziale in A.2.4
2.1.4.3 (tangente). La tangente è il quoziente tra seno e coseno, e ottiene una periodicità
di π, oltre che la non definitezza ove si annulla il coseno.
Andamento del grafico:
tan x
x
π
4
π
2
π
2π
cotan x
Talvolta si definisce anche la cotangente, che è semplicemente l’inversa della tangente.
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
23
2.1.4.4 (archi). Poiché seno e coseno sono periodiche,
esse non sono biiettive; possono essere invertite solo restringendo il dominio, e di solito viene fatto usando l’intervallo [−π/2, π/2] per il seno, e [0, π] per il coseno. Le
funzioni inverse hanno naturalmente come dominio l’intervallo [−1, 1]: quindi l’arcoseno (risp. arcocoseno) è
il valore in [−π/2, π/2] (risp. [0, π]) il cui seno (risp.
coseno) è il numero dato.
Analogamente si procede per la tangente, per cui si
ottiene la funzione arcotangente definita su tutto R a
valori nell’intervallo aperto ] − π/2, π/2[.
2.1.5
π
arcotan
π
2
arcsin
arcos
arctan
− π2
Funzioni iperboliche e inverse.
2.1.5.1 (analogia). Nel caso delle funzioni trigonometriche, la relazione fondamentale
cos2 x + sin2 x = 1 porta direttamente a parametrizzare il circolo unitario X 2 + Y 2 = 1
del piano cartesiano, e la variabile x assume tre significati diversi ma coincidenti: angolo
in radianti, misure dell’area del settore circolare (di angolo 2x), misura della lunghezza del
tratto di circonferenza. Il tentativo di creare lo stesso schema usando invece l’iperbole equilatera X 2 − Y 2 = 1 presenta il problema che non è più chiaro che cosa usare come variabile
x (in effetti non è né un angolo, né una lunghezza sul ramo di iperbole, ma una misura di
area che vedremo parlando di integrali).
Tuttavia un’altra analogia porta allo stesso risultato: parlando di numero complessi
abbiamo usato la definizione
eix = cos x + i sin x
e quindi
e−ix = cos x − i sin x
da cui facendo somma/differenza troviamo
cos x =
eix + e−ix
2
e
sin x =
eix − e−ix
2i
e ora daremo definizioni analoghe per le funzioni iperboliche.
2.1.5.2 (seno e coseno iperbolici). Definiamo seno
e coseno iperbolici tramite
cosh x =
ex + e−x
2
e
sinh x =
cosh x
ex − e−x
2
da cui segue immediatamente che cosh2 x − sinh2 x = 1
(relazione fondamentale della trigonometria iperbolica),
e quindi i punti di coordinate cosh x, sinh x descrivono
un ramo di iperbole equilatera.
La funzione cosh è sempre > 1 e pari, mentre la funzione sinh è dispari. I grafici si ottengono facilmente sommando e sottraendo quelli di ex /2 e di e−x /2. Naturalmente, la trigonometria iperbolica comporta altrettante
formule di quella usuale, che però si dimostrano semplicemente facendo i conti con le funzioni esponenziali che
le definiscono. Riportiamo i fatti principali in A.2.5
ex /2
sinh x
e−x /2
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
24
2.1.5.3 (tangente iperbolica). Analogamente al caso
usuale, definiamo la tangente iperbolica come quoziente
di coseno e seno iperbolici, e la cotangente iperbolica
come l’inverso:
tanh x =
sinh x
cosh x
e
cotanh x =
tanh x
cosh x
sinh x
cotanh x
I grafici si ottengono facilmente.
2.1.5.4 (settori). Le funzioni inverse per composizione
delle funzioni iperboliche si chiamano settori (piuttosto
che angoli, perché come abbiamo detto corrispondono
piuttosto ad aree di settori descritti dall’iperbole). Peraltro, in modo non sorprendente visto che le funzioni
iperboliche sono definite in termini di esponenziali, i
settori si esprimono facilmente in termini di logaritmi:
p
settcosh(x) = log(x + x2 − 1)
p
settsinh(x) = log(x + x2 + 1)
r
1+x
settanh(x) = log
.
1−x
settsinh
settcosh
settcotanh
I loro grafici si deducono per simmetria sulla diagonale
da quelli delle funzioni iniziali.
settanh
Verifichiamo per esempio la prima formula: posto
y = cosh x =
si risolve ex = y ±
ex + e−x
2
e2x − 2yex + 1 = 0
ovvero
p
y 2 − 1 da cui
settcosh y = x = log(y +
p
y 2 − 1) .
Verifichiamo l’ultima: posto
y = tanh x =
si risolve e2x =
ex − e−x
ex + e−x
ovvero
ex (1 − y) = e−x (1 + y)
1+y
da cui
1−y
settanh y = x =
1
log
2
1+y
1−y
.
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
2.2
2.2.1
25
Limiti e continuità.
Limiti.
2.2.1.1 (definizioni di limiti). Il limite ad x0 ∈ R ∪ {∞, ±∞} di una funzione di variabile
reale f si può definire in due modi equivalenti: si dice che f (x) tende a ` ∈ R ∪ {∞, ±∞}
per x che tende a x0 e si scrive
lim f (x) = `
x→x0
oppure
f (x) −→ `
x→x0
se una delle seguenti (equivalenti) condizioni vale:
(1) come nella definizione generale: per ogni intorno di ` esiste un intorno di x0 mappato
nel primo da f (tranne al più per x0 );
(2) per ogni successione an → x0 si ha che f (an ) → ` (ogni successione convergente a x0
ha immagine tramite f convergente a `).
La seconda definizione è vicina all’idea intuitiva di “disegnare senza staccare la matita
dal foglio”. La prima definizione è quella più utile tecnicamente, in quanto si riduce alla
manipolazione di disequazioni.
Che le due definizioni siano equivalenti si può vedere nel modo seguente: se (1) è falso,
esiste un intorno V di ` tale che nessun intorno di x0 ha immagine contenuta in lui; scegliendo
allora negli intorni di x0 punti con immagine fuori da V si trova una successione che converge
a x0 la cui immagine (essendo fuori da V ) non può convergere a `, e quindi è falso anche (2).
Quindi (2) implica (1). Viceversa, se è falso (2), esiste una successione convergente a x0 tale
che l’immagine non converge a `, quindi che ha infiniti termini fuori da un qualche intorno
di x0 ; tale intorno allora non può soddisfare la definizione (1). Quindi (1) implica (2).
2.2.1.2 (unicità del limite). Siccome R è spazio metrico, il limite se esiste è unico per
ogni punto non isolato del dominio.
2.2.1.3 (casi specifici?). La definizione precedente andrebbe esplicitata, a seconda della
forma degli intorni, nei casi in cui x0 è finito, ∞, +∞, −∞, e analogamente per `: in tutto
sedici casi che possiamo riassumere in A.2.6.
2.2.1.4 (limiti destri e sinistri). Qualche volta (per esempio agli estremi di esistenza
di una funzione, oppure in casi in cui non esiste limite), conviene definire i limiti destri o
sinistri, usando solo intorni destri o sinistri del punto x0 : per esempio l’espressione
lim f (x) = `
x→x+
0
(resp. `+ )
significa che l’antimmagine di ogni intorno (risp. intorno destro) di ` è intorno destro di x0 .
Chiaramente, se il limite esiste, allora esistono i limiti destro e sinistro e coincidono (con
il limite); viceversa, se i limiti destro e sinistro coincidono, allora il limite esiste ed è uguale
ai due.
2.2.1.5 (proprietà algebriche dei limiti). Se abbiamo che lim f (x) = f0 e lim g(x) =
x→x0
x→x0
g0 sono finiti, allora risulta:
• somma, differenza: lim (f (x) ± g(x)) = f0 ± g0 ;
x→x0
• prodotto: lim (f (x)g(x)) = f0 g0 ;
x→x0
• quoziente: lim (f (x)/g(x)) = f0 /g0 se g0 6= 0;
x→x0
• potenza: lim (f (x)g(x) ) = f0g0 se f0 > 0;
x→x0
• confronto: se f (x) 6 g(x) (basta in un intorno di x0 ) allora f0 6 g0 ;
• carabinieri: se f (x) 6 h(x) 6 g(x) (basta in un intorno di x0 ) e f0 = g0 = ` allora
anche lim h(x) = `;
x→x0
• composizione: lim f (g(x)) = lim f (x) se l’immagine di g è contenuta nel dominio di
x→x0
x→g0
f (basta in un intorno di x0 );
• permanenza del segno: se f0 > 0 allora f (x) > 0 per ogni x in qualche intorno di x0 .
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
26
2.2.1.6 (forme indeterminate). Come nel caso delle successioni, quando entrano in gioco
limiti infiniti o denominatori nulli in alcuni casi si estendono le regole algebriche, ma vi
sono anche delle forme indeterminate in cui non si può a priori decidere il risultato (che va
studiato caso per caso): una per differenza (∞ − ∞), tre per prodotto e quoziente (0 · ∞,
0/0, ∞/∞), tre per le potenze (∞0 , 1∞ , 00 ), che vanno esplorati caso per caso.
2.2.1.7 (limiti di funzioni elementari). Vi sono alcuni casi elementari di limiti che
conviene studiare subito:
(1) rapporto di polinomi verso ±∞: se P (x) e Q(x) sono polinomi con coefficienti
dominanti (quelli di grado massimo) a e b rispettivamente:
∞ se grado di P > grado di Q
P (x)
= a/b se grado di P = grado di Q
lim
x→∞ Q(x)
0
se grado di P < grado di Q
(si possono specificare meglio i limiti ±∞ e 0± verso ±∞ tenendo conto dei segni di a e b);
(2) esponenziali a ±∞: a seconda che la base sia maggiore o minore di 1
(
(
+∞
se
a
>
1
0+
se a > 1
x
e
lim
a
=
lim ax =
+
x→−∞
x→+∞
0
se a < 1
+∞ se a < 1
(3) logaritmi verso 0 e +∞: anche qui dipende dalla base
(
(
+∞ se a > 1
−∞ se a > 1
lim loga x =
e
lim+ loga x =
x→+∞
x→0
−∞ se a < 1
+∞ se a < 1
(4) funzioni trigonometriche: seno e coseno non presentano problemi al finito, mentre
lim tan x = ∓∞
±
x→k π
2
per ogni k = 2n + 1 con n intero qualsiasi (dovuto all’annullamento del coseno).
(5) funzioni iperboliche: essendo combinazioni di esponenziali non hanno problemi al
finito, mentre
lim cosh x = +∞
x→±∞
,
lim sinh x = ±∞ ,
x→±∞
lim tanh x = ±1
x→±∞
come si vede facilmente.
2.2.1.8 (limiti notevoli). Vi sono poi alcuni limiti non banali e molto importanti:
(1) costante di Nepero:
x
1
=e
lim 1 +
x→∞
x
come risulta dall’analogo limite per le successioni.
Si noti invece che il limite a 0 della stessa espressione è 1 (vedere la funzione di Nepero
in S.2.17).
(2) passando al logaritmo della precedente espressione e poi invertendo la variabile (si
ricordi che 1/x −→ 0) si hanno i limiti
x→∞
1
lim x log 1 +
=1
x→∞
x
e
lim
x→0
log(1 + x)
=1
x
che sarebbero forme indeterminate ∞ · 0 e 0/0;
(3) sostituendo nell’ultima espressione x con ex − 1 possiamo cancellare il logaritmo e
ottenere (dopo inversione)
ex − 1
lim
=1
x→0
x
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
27
che sarebbe una forma indeterminata 0/0;
(4) sostituendo invece x con (1 + x)α − 1 possiamo calcolare
α log(1 + x)
αx
log(1 + x)
αx
= lim
= lim
=1
α
α
x→0 (1 + x) − 1
x→0 (1 + x) − 1
x→0 (1 + x)α − 1
x
lim
da cui invertendo:
(1 + x)α − 1
=α
x→0
x
che sarebbe ancora una forma indeterminata 0/0;
(5) passando alla trigonometria, e sfruttando il fatto geometrico evidente che sin(x) 6
x 6 tan(x) si ottiene subito il limite
lim
lim
x→0
sin x
=1
x
(passare al quoziente per sin(x), invertire e usare i carabinieri) che sarebbe una forma 0/0;
(6) moltiplicando per (1+cos x) si riporta al limite precedente quest’altro limite notevole:
lim
x→0
1 − cos x
1
=
2
x
2
(ancora una forma 0/0).
(6) Si noti anche che
sinh x
=1
x
(facile dalla definizione di sinh e dal limite con l’esponenziale), e anche che
lim
x→0
lim
x→0
cosh x − 1
1
=
x2
2
(stessa tecnica di prima).
2.2.1.9 (non-limiti notevoli). Alcuni casi elementari in cui il limite non esiste:
(1) limite a ±∞ delle funzioni trigonometriche elementari, e più in generale delle funzioni
periodiche non costanti, non esiste: infatti tali funzioni assumono tutti i loro valori in un
intorno di infinito;
(2) di conseguenza il limite a 0 di funzioni trigonometriche elementari calcolate in 1/x
non esiste, e non esistono nemmeno i limiti destri e sinistri; si osservi però che x sin(1/x) e
x cos(1/x) hanno limite a 0, mentre x tan(1/x) no (perché?);
(3) la funzione sgn(x) pari a x/|x| se x 6= 0 non ammette limite verso 0: infatti in ogni
intorno di zero assume entrambi i valori ±1; peraltro esistono i limiti destro e sinistro, ma
non coincidono.
2.2.1.10 (stime asintotiche). Due funzioni f, g si dicono asintotiche in x0 se il limite verso
x
x0 del loro rapporto vale 1, e si scrive allora f ∼0 g. È allora evidente che esse hanno lo stesso
comportamento al limite verso x0 , ovvero il limite di f esiste se e solo se esiste quello di g e
in tal caso sono uguali. È spesso utile nel calcolo dei limiti verso x0 ∈ R sostituire funzioni
con altre asintotiche (il limite non cambia), e per esempio abbiamo già visto che:
0
log(1 + x) ∼ x
0
ex − 1 ∼ x
0
(1 + x)α ∼ 1 + αx
x2
x2
0
0
sinh x ∼ x
cosh x ∼ 1 +
2
2
e che ogni polinomio è asintotico all’infinito al suo monomio dominante (e verso 0 al suo
monomio di grado minimo).
0
sin x ∼ x
0
cos x ∼ 1 −
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
2.2.2
28
Continuità.
2.2.2.1 (definizioni). Una funzione si dice continua in un punto se il valore della funzione
in quel punto coincide con il limite verso quel punto. Una funzione si dice continua se lo è in
ogni punto. La continiutà si può esprimere quindi dicendo che per ogni intorno dell’immagine
di un punto l’antimmagine dell’intorno è un intorno del punto.
Una funzione si dice prolungabile per continuità in un punto in cui non è definita se il
punto è di accumulazione per il dominio della funzione, e la funzione ammette limite in quel
punto.
2.2.2.2 (proprietà di stabilità). Le funzioni continue (ev. in un punto) godono di ottime
proprietà di stabilità: per esempio se f, g sono continue allora
• somma, differenza: f ± g sono continue;
• prodotto: f g è continua;
• quoziente: f /g è continua dove g 6= 0 (in particolare l’inversa moltiplicativa);
• composizione: g ◦ f è continua ovunque sia definita;
• inversione: l’inversa per composizione di una funzione biiettiva e continua su un intervallo chiuso e limitato è ancora continua (più in generale potrebbe essere falso: la funzione
che vale x per x > 0 e x + 1 per x < −1 è una biiezione tra R r [−1, 0[ e R, ma l’inversa
insiemistica non è continua in 0).
2.2.2.3 (esempi di discontinuità). Abbiamo già visto esempi di funzioni in cui non esiste limite per qualche valore finito, e quindi esempi di funzioni discontinue attribuendo un
qualsiasi valore alla funzione in quel punto: per esempio la funzione segno è discontinua in
0 (si definisce sgn(0) = 0 comunque).
Consideriamo esempi più patologici: la funzione che vale 1 su Q e 0 su R r Q (si dice
funzione caratteristica di Q) non è continua in nessun punto (capire perché).
La funzione [x] parte intera, definita come il più grande intero minore o uguale ad x,
è discontinua sui punti di Z. In questo caso si dice che è semicontinua a destra (perché il
limite destro esiste uguale alla funzione; anche il limite sinistro esiste, ma non è il valore
della funzione in quel punto: vedi il grafico in S.2.1).
Le funzioni periodiche non hanno limite all’infinito se non sono costanti; la funzione
sin(1/x) non ha limite a 0 (non ha né limite destro, né sinistro: vedi S.2.9 per il grafico),
mentre la funzione x sin(1/x) ha limite sia a 0 sia a ±∞.
2.2.2.4 (funzioni continue su intervalli chiusi e limitati). Le funzioni continue definite su un intervallo chiuso e limitato hanno proprietà particolarmente utili, che dipendono
strettamente dalla forma del dominio, come vedremo poi in qualche (contro)esempio.
2.2.2.5 (teorema degli zeri). Se f : [a, b] → R è funzione continua su [a, b], e f (a)f (b) < 0
(cioè discordi), allora esiste c ∈]a, b[ tale che f (c) = 0. Tale c è unico se la funzione è
strettamente monotona sull’intervallo.
Questo risultato si verifica con un bel procedimento induttivo: si divide l’intervallo in
due parti tramite un punto c1 , e se f (c1 ) 6= 0 (altrimenti abbiamo il nostro c) continuiamo
sulla parte che soddisfa ancora l’ipotesi del teorema. Troviamo cosı̀ una successione cn che
converge ad un punto (qui serve essere su in intervallo chiuso limitato) e in cui la funzione
deve essere nulla.
2.2.2.6 (teorema dei valori intermedi). Se f : [a, b] → R è funzione continua su [a, b],
allora assume tutti i valori intermedi tra due qualunque valori assunti (per ogni ` compreso
tra due valori assunti dalla funzione, esiste c ∈ [a, b] tale che f (c) = `). In particolare
l’immagine è un intervallo.
Segue dal precedente.
2.2.2.7 (teorema di Weierstrass). Se f : [a, b] → R è funzione continua su [a, b], allora i
valori assunti dalla funzione ammettono massimo assoluto M e minimo assoluto m.
La dimostrazione di questo risultato è piuttosto difficile; forse scriveremo le idee in A.2.11
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
29
2.2.2.8. Dai due teoremi precedenti segue quindi (in effetti è equivalente) che l’immagine
continua di un intervallo chiuso e limitato è un intervallo chiuso e limitato.
2.2.2.9 ((contro)esempi). Per capire che le ipotesi “intervallo chiuso e limitato” sono
essenziali, si consideri per esempio la funzione sgn(x) (è definita tranne che in 0, oppure è
ivi discontinua), una qualunque potenza con dominio R o su intervalli non chiusi (non ha
massimi e minimi assoluti di solito), la funzione x − [x] sull’intervallo [0, 1] (non ha massimo,
non è continua all’estremo 1), ecc.
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
2.3
Derivate.
2.3.1
Derivate.
30
2.3.1.1 (Motivazioni geometriche e dinamiche). Vi sono varie motivazioni per introdurre lo studio delle derivate, ma le due principali sono le seguenti. Geometricamente, le
funzioni piı̀ semplici sono le rette (polinomi di primo grado), e per ogni funzione e in ogni
punto in cui sia definita possiamo chiederci se esista una retta passante per quel punto e
che “approssimi meglio di tutte” l’andamento della funzione in quel punto (tangente); il suo
coefficiente angolare sarà allora la derivata in quel punto della funzione data.
Dinamicamente, quando si vuole capire come varia una certa quantità (spazio percorso,
velocità di un veicolo, peso di un individuo), il modo più immediato è di calcolare il rapporto
tra le differenze tra i valori e l’intervallo di tempo tra di loro; questo procedimento portato
al limite per un intervallo infinitesimo darà la derivata (velocità, accelerazione, crescita) in
quell’istante.
2.3.1.2 (definizione). Data una funzione reale f , e x0 un punto interno del dominio,
definiamo la derivata di f in x0 se esiste il limite
lim
x→x0
f (x0 + ε) − f (x0 )
f (x) − f (x0 )
= lim
ε→0
x − x0
ε
df
e si indica con un simbolo tra f 0 (x0 ) oppure dx
(x0 ).
Se una funzione è derivabile in ogni punto, chiamiamo derivata e indichiamo con f 0 (x)
df
oppure dx
(x) la funzione che ad ogni valore x associa il valore della derivata di f in quel
punto.
2.3.1.3 (retta tangente). Se una funzione f è derivabile in un punto x0 , allora la retta
y = f 0 (x0 )(x − x0 ) + f (x0 ) si dice retta tangente ad f in x0 , e ha la proprietà di asintoticità
x
f (x) − f (x0 ) ∼0 f 0 (x0 )(x − x0 ).
2.3.1.4 (continuità). Se una funzione è derivabile in un punto, allora essa è anche continua
in quel punto. Segue subito dalla proprietà di asintoticità precedentemente scritta: f (x) e
f (x0 ) + f 0 (x0 )(x − x0 ) hanno lo stesso limite verso x0 .
Il viceversa è falso, come mostra per esempio la funzione |x| (valore asoluto) che è continua
in 0, ma non è ivi derivabile (la derivata di |x| è sgn(x) fuori di zero).
Un tempo si pensava che una funzione continua fosse “quasi sempre” derivabile, tranne
eventualmente in “pochi” punti; oggi sappiamo invece che esistono funzioni sempre continue
e mai derivabili!
2.3.1.5 (derivate di funzioni elementari). Nel caso delle funzioni elementari si calcolano
facilmente, usando la definizione e alcuni limiti notevoli, le derivate:
(0) costanti: derivata di funzioni costanti è nulla;
(1) potenze: (xα )0 = αxα−1 , in particolare x0 = 1;
(2) esponenziali: (ex )0 = ex , e in generale (ax )0 = ax log a;
(3) logaritmi: (log x)0 = 1/x, e in generale (loga x)0 = loga (e)/x;
(4) trigonometriche: (sin x)0 = cos x, (cos x)0 = − sin x, (tan x)0 = 1/ cos2 (x);
(5) iperboliche: (sinh x)0 = cosh x, (cosh x)0 = sinh x, (tanh x)0 = 1/ cosh2 (x)
(vedi A.2.12 per qualche verifica).
2.3.1.6 (regole di derivazione). Vi sono alcune facili regole di derivazione che permettono
di meccanizzare il calcolo:
• linearità: la derivata commuta con somme e prodotti per costanti, cioè (f +g)0 = f 0 +g 0
e (αf )0 = αf 0 , ed è facile sulla definizione;
• prodotto: (f g)0 = f 0 g + f g 0 , cioè la derivata del prodotto è la somma dei prodotti di
una derivata per l’altra non derivata (regola di Leibniz), infatti si ottiene da A.2.13;
• inversa moltiplicativa: (1/f )0 = −f 0 /f 2 , dalla precedente;
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
31
f 0 g − f g0
, usando le due precedenti;
g2
• composizione: (g ◦ f )0 = (g 0 ◦ f ) · f 0 , cioè esplicitamente: il prodotto della derivata di g
calcolata in f per la derivata di f (detta anche regola della catena), e si ottiene da A.2.14;
• inversa per composizione: (f −1 )0 = 1/(f 0 ◦ f −1 ), cioè esplicitamente l’inversa moltiplicativa della derivata di f calcolata in f −1 , viene dalla precedente applicata a f −1 ◦ f =
x.
• quoziente: (f /g)0 =
2.3.1.7 (esempi di composizione). Conviene fare attenzione alla regola di composizione:
1
· cos x = cotan x
(1) (log(sin x))0 =
sin x
1
(10 ) (log(cos x))0 =
· (− sin x) = − tan x
cos x
1
(2) (sin(log x))0 = cos(log x) ·
x
1
(20 ) (cos(log x))0 = − sin(log x) ·
x
(3) (esin x )0 = esin x · cos x
(30 ) (ecos x )0 = ecos x · (− sin x)
(4) (sin(ex ))0 = cos(ex ) · ex
(40 ) (cos(ex ))0 = − sin(ex ) · ex
Naturalmente la regola della catena può essere appunto usata a catena:
• (h ◦ g ◦ f )0 = (h0 ◦ g ◦ f ) · (g 0 ◦ f ) · f , e cosı̀ via.
La regola si applica al caso di f (x)g(x) = eg(x)log f (x) per dare:
f0
• (f g )0 = (eg log f )0 = eg log f (g log f )0 = f g g 0 log f + g
.
f
Invece il caso di logf (x) g(x) si risolve riscrivendolo come logf (x) (e) log g(x) =
log g(x)
, che
log f (x)
si deriva con la regola del rapporto (e dei logaritmi).
2.3.1.8 (esempi di inversione). Quali esempi della regola di inversione, ricordiamo le
derivate delle funzioni inverse della trigonometria:
1
1
(1) (arcsin x)0 =
=√
cos(arcsin x)
1 − x2
1
1
(10 ) (arccos x)0 =
= −√
− sin(arccos x)
1 − x2
1
1
(100 ) (arctan x)0 =
=
1/ cos2 (arctan x)
1 + x2
1
1
(2) (settsinh x)0 =
=√
cosh(settsinh x)
1 + x2
1
1
(20 ) (settcosh x)0 =
=√
sinh(settcosh x)
x2 − 1
1
1
(200 ) (settanh x)0 =
=
2
1 − x2
1/ cosh (settanh x)
(tutte importanti in vista del calcolo delle primitive).
Naturalmente anche la derivata del logaritmo poteva calcolarsi come derivata dell’inversa
dell’esponenziale: log(x)0 = 1/elog x = 1/x.
2.3.1.9 (qualche applicazione: variazione di funzioni correlate). Se due funzioni f (x)
e g(x) sono legate da qualche relazione F (f (x), g(x)) = 0 allora possiamo trovare almeno
nei casi semplici una relazione tra le loro derivate (che ci permette di descrivere come sono
legate le variazioni delle funzioni date). Per esempio:
. se f 2 + g 2 = k ∈ R allora f f 0 + gg 0 = 0, da cui f 0 = fg g 0 = √ g 2 g 0 ;
k−g
. se f g = k ∈ R allora f 0 g + f g 0 = 0 da cui f 0 = fg g 0 =
. se f /g = k ∈ R allora f 0 g − f g 0 = 0 ovvero f 0 = kg 0 ;
. se f = eg allora f 0 = g 0 eg ;
k 0
g2 g ;
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
32
. se f = log g allora f 0 = g 0 /g;
. se f = cos g allora f 0 = −g 0 sin g;
per qualche problema correlato vedi A.2.17.
2.3.2
Massimi e minimi locali.
Problemi di “ottimizzazione” si dicono quelli in cui si cerca di massimizzare o minimizzare
una fissata quantità o funzione. Si veda qualche esempio in A.2.18.
2.3.2.1 (punti di estremo locali). Un punto x0 per una funzione f si dice di massimo (risp.
minimo) locale se f (x0 ) è massimo (risp. minimo) in qualche intorno di x0 ; esplicitamente
significa che f (x) 6 f (x0 ) (risp. f (x) > f (x0 )) per ogni x tale che |x − x0 | < ε (per qualche
ε > 0).
Chiaramente i punti di massimo (risp. minimo) assoluto sono anche di massimo (minimo)
locale, mentre il viceversa non è vero, come si vede facilmente con qualche polinomio di grado
3 o 4, vedi per esempio x3 −x, e dal fatto che massimo e minimo assoluto (stretti), se esistono,
sono unici, mentre massimi e minimi locali no.
2.3.2.2 (punti stazionari e critici). Si dicono punti critici di una funzione f quelli in cui
si annulla la sua derivata, se esiste. Si dicono stazionari se la derivata esiste ed è nulla.
2.3.2.3 (teorema di Fermat). Se un punto interno al dominio è di estremo locale, allora
è un punto critico, cioè se è derivabile la funzione ha ivi derivata nulla.
Usando le ipotesi di estremalità si vede infatti che derivata destra e sinistra hanno segno
opposto, e quindi se esiste la derivata dev’essere nulla.
2.3.2.4 (corollario di Fermat). In particolare, se f è definita in un intervallo chiuso e
limitato [a, b] e derivabile in ]a, b[, allora gli estremi locali in ]a, b[ sono punti stazionari, e
i punti di massimo e minimo assoluti (esistono per Weierstrass) sono da cercare tra questi
e gli estremi dell’intervallo (che possono essere estremali, ma in cui la derivata laterale può
benissimo non annullarsi!).
2.3.2.5 (flessi). È ancora importante notare che il viceversa di Fermat non è vero: un punto
può essere critico senza essere di estremo locale; in particolare si chiamano flessi (orizzontali)
i punti in cui la derivata si annulla, ma la funzione non ha estremo. Per esempio il punto 0
per le potenze dispari x2n+1 con n > 0.
2.3.2.6 (punti angolosi). È ovvio, ma osserviamo che un punto può essere un estremo
locale per una funzione senza
p che essa sia derivabile in quel punto, per esempio 0 per la
funzione modulo |x| oppure |x| (giustamente non derivabili in quel punto).
2.3.3
Proprietà fondamentali.
2.3.3.1 (teorema di Rolle). Sia f funzione continua definita nell’intervallo chiuso e limitato [a, b], e derivabile in ]a, b[. Se f (a) = f (b), allora esiste almeno un punto c ∈]a, b[ con
f 0 (c) = 0.
Infatti, ammette massimo e minimo assoluti (Weierstrass), e almeno uno è interno, quindi
stazionario.
2.3.3.2 (teorema di Lagrange). Sia f funzione continua definita nell’intervallo chiuso e
limitato [a, b], e derivabile in ]a, b[. Allora esiste almeno un punto c ∈]a, b[ tale che
f (b) − f (a)
= f 0 (c) .
b−a
Segue dal teorema di Rolle (confrontando la funzione con la retta per i due estremi), che ne
è un caso particolare.
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
33
f 0 (c)
2.3.3.3 (interpretazione geometrica). C’è una evidente interpretazione geometrica di questi fatti: il ter(a)
rappresenta il coefficiente angolare delmine f (b)−f
b−a
la retta per i punti estremi di definizione (a, f (a)) e
(b, f (b)); quindi si afferma che esiste un punto c tale che
la retta tangente al grafico di f è parallela alla retta tra
gli estremi di definizione.
f (b)−f (a)
b−a
a
c
b
2.3.3.4 (Monotonia). Sia f funzione derivabile definita nell’intervallo ]a, b[. Allora f è
crescente (risp. decrescente) in ]a, b[ se e solo se ha derivata positiva (risp. negativa) in ]a, b[.
2.3.3.5 (!). Una funzione continua può avere derivata positiva in un punto, senza che essa
sia crescente in un intorno del punto (a meno che la derivata non sia continua, nel qual
caso si usa la permanenza del segno della derivata): si studi il punto 0 per la funzione
1
2
2 x + x sin(1/x).
2.3.3.6 (Annullamento). Sia f funzione derivabile definita nell’intervallo ]a, b[. Allora f
è costante in ]a, b[ se e solo se ha derivata nulla in ]a, b[. La novità consiste nel se: se la
funzione ha derivata nulla deve essere costante, altrimenti possiamo applicare Lagrange a
due punti con diverso valore della funzione.
2.3.3.7 (!). Non si può usare il risultato precedente per insiemi più generali degli intervalli:
per esempio sull’unione di due intervalli la funzione è solo “localmente costante”, e può avere
due valori diversi sui due intervalli.
Per esempio la funzione sgn(x) su R r {0} ha derivata nulla ovunque, ma non è costante.
Si consideri anche la più criptica arctan x + arctan x1 .
2.3.4
Regole di De L’Hôpital.
Si tratta di uno dgli strumenti migliori per lo studio delle forme indeterminate.
2.3.4.1 (teorema di De L’Hôpital). Siano f, g derivabili nell’intervallo ]a, b[. Per c ∈ [a, b],
se i limiti di f e g in c sono entrambi 0 o entrambi ∞, e il limite di f 0 /g 0 in c esiste, allora
f (x)
f 0 (x)
= lim 0
.
x→c g(x)
x→c g (x)
lim
La verifica è in A.2.15 usando il teorema di Cauchy.
2.3.4.2 (nota bene!). È importante notare le due ipotesi: la prima dice che f /g ha forma
indeterminata in c, la seconda è che esiste il limite del quoziente delle derivate.
Se la forma non fosse indeterminata, il risultato sarebbe falso: per esempio il limite per
x → 1 di 1/x2 non è nullo!
Se il limite del quoziente delle derivate non esiste, non si può concludere nulla: per
x+sin x
esempio il limite a +∞ di x−sin
x esiste, anche se quello delle derivate no.
2.3.4.3 (nota bene!). Infine notiamo che si fa il quoziente delle derivate, non la derivata
del quoziente, e non si fa per il prodotto (come trattare 0 · ∞?).
2.3.4.4 (esempi). Confronto di infiniti:
(1) esponenziali/polinomi per α > 0:
eαx
αeαx
αn eαx
=
lim
=
·
·
·
=
lim
= +∞
x→+∞ xn
x→+∞ nxn−1
x→+∞
n!
lim
(2) polinomi/logaritmi:
xn
nxn
n(n − 1) · · · (n − m + 1)xn
=
lim
=
·
·
·
=
lim
= +∞
m
x→+∞ log x
x→+∞ m logm−1 x
x→+∞
m!
lim
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
34
(supponendo le basi maggiori di 1, si dice che ogni esponenziale cresce più velocemente di
ogni polinomio, e che ogni polinomio cresce più velocemente di ogni logaritmo).
Per altri esempi, si veda A.2.8
2.3.4.5 (cattivi esempi). Vi sono anche casi in cui la regola
di De L’Hôpital non permette
√
1+x2
di risolvere la situazione, per esempio il limite a +∞ di x (che è elementare, peraltro).
2.3.5
Derivate seconde e convessità.
2.3.5.1 (derivate successive). Lo studio delle derivate successive di una funzione (cioè
delle derivate delle derivate, ecc.) dà informazioni più sottili sulla funzione stessa, e ci
limitiamo a studiare il caso delle derivate seconde.
Notazioni per le derivate successive alla prima sono:
d2 f
(x) per la derivata seconda,
• f 00 oppure
dx2
3
d f
• f 000 oppure
(x) per la derivata terza,
dx3
dn f
• f (n) oppure
(x) per la derivata n-esima.
dxn
2.3.5.2 (Convessità/concavità per tangenti). Il grafico di una funzione si dice convesso
(risp. concavo) per tangenti se ogni tangente sta sotto (risp. sopra) al grafico.
2.3.5.3 (Convessità/concavità per corde). Il grafico di una funzione si dice convesso
(risp. concavo) per corde se ogni segmento che unisca due punti del grafico sta sopra (risp.
sotto) al grafico.
2.3.5.4 (Criterio di convessità/concavità). Il grafico di una funzione derivabile almeno
due volte è convesso (risp. concavo) nell’intervallo ]a, b[ se e solo se la derivata seconda in
quell’intervallo è positiva (risp. negativa).
Abbiamo infatti che f 00 > 0 nell’intervallo significa che f 0 è crescente nell’intervallo, che
geometricamente dice che le rette tangenti diventano via via più ripide (convessità).
2.3.5.5 (punti di flesso). Si dicono punti di flesso quelli in cui una funzione cambia di
carattere convesso/concavo. Si tratta quindi di punti in cui si annulla la derivata seconda
(ma non viceversa).
2.3.5.6 (studio dei punti stazionari). Per determinare se punti stazionari sono di massimo locale, o di minimo locale, o nessuno (flessi orizzontali), si può ricorrere alle derivate
successive quando esistono: c con f 0 (c) = 0 è di massimo locale se f 00 (c) < 0, di minimo
locale se f 00 (c) > 0, mentre non si pò ancora dire nulla se anche f 00 (c) = 0. Queste proprietà
sono facili pensando che la derivata seconda dice come varia la retta tangente intorno al
punto (in un punto di massimo locale, la derivata prima è decrescente, quindi la derivata
seconda negativa).
In generale valgono i seguenti fatti: se f 0 (c) = 0 allora c è estremale o meno a seconda
che la prima derivata successiva che non si annulli in c sia pari o dispari; se poi è estremale,
è punto di massimo o di minimo a seconda che la prima derivata (d’ordine pari) che non si
annulla in c abbia valore negativo o positivo. Una giustificazione di queste affermazioni si
può fare usando gli sviluppi di Taylor, ma una idea intuitiva si può ottenere esplorando il
caso dei monomi in 0.
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
2.3.6
35
Studio di funzioni.
Facciamo un rapido riassunto della tecnica per studiare una funzione data.
Dominio e immagine. Per prima cosa si determina il dominio di esistenza, applicando
le dovute limitazioni agli argomenti delle funzioni che compaiono. Se possibile si cerca di
capire anche l’immagine, per esempio studiando il segno della funzione, o altri aspetti se
evidenti.
Simmetrie e periodicità. Nel dominio di esistenza, si individuano eventuali regolarità
come simmetrie e periodicità: eventualmente permettono di ridurre lo studio successivo.
Limiti agli estremi. Si studiano i limiti della funzione ai punti estremi del dominio di
esistenza, eventualmente ±∞.
Crescenza Si studia il segno della derivata prima per determinare crescenza/decrescenza
della funzione.
Massimi e minini relativi. Si studiano degli zeri della derivata prima per determinare
i punti critici, riconoscendo massimi e minimi locali usando il punto precedente, oppure il
segno della derivata seconda.
Asintoti. Si determinano eventuali asintoti separatamente:
orizzontali: se i limiti per ±∞ sono finiti;
verticali: se esistono limiti ±∞ in punti estremi del dominio di esistenza;
obliqui: si cerca quando si hanno limiti infiniti all’infinito; se esistono rette y = ax + b
tali che lim f (x) − ax − b = 0 dev’essere che a = lim f (x)/x esiste finito, e che b =
x→±∞
x→±∞
lim f (x) − ax esiste anch’esso finito.
x→±∞
Flessi. Gli eventuali flessi si dividono in:
orizzontali: sono i punti stazionari non estremali;
verticali: sono tra i punti in cui eventualmente diverge la derivata prima (attenzione a
distinguerle dalle cuspidi);
obliqui: tra i punti che annullano la derivata seconda, e non già classificati
Covessità/concavità. Si studia se possibile il segno della derivata seconda.
Grafico. Con gli elementi precedenti dovrebbe essere possibile tracciare l’andamento del
grafico; spesso tracciarlo via via che ci sono evidenze facilita lo studio dei vari punti.
Qualche esercizio si può trovare in A.2.19
2.3.7
Approssimazioni e sviluppi di Taylor.
Essenzialmente la derivata prima permette di approssimare una funzione data con una
funzione lineare vicino ad un punto fissato x0 , nel senso della asintoticità, cioè f (x) −
x
f (x0 ) ∼0 f 0 (x0 )(x − x0 ) (che significa che il limite verso x0 del rapporto è 1). Cosa fare
per approssimare “meglio” la funzione data? Una possibile risposta è usare approssimazioni
con polinomi.
2.3.7.1 (notazione di “o-piccolo”). Conviene usare la seguente terminologia: una funzione h(x) è o-piccolo di un’altra funzione f (x) vicino a x0 , e di scrive h(x) = ox0 (f (x)) se
risulta che
h(x)
=0
lim
x→x0 f (x)
(la nozione è usata nei casi in cui entrambe le funzioni sono infinitesime o infinite in x0 , e si
dice che h(x) è infinitesimo di ordine superiore a f (x), ovvero che h(x) è infinito di ordine
inferiore a f (x) rispettivamente). Spesso si sottintende x0 se è 0 oppure ∞ (dal contesto).
2.3.7.2 (esempi). Vicino a zero ogni monomio xn è o-piccolo di xm con m < n (verso
infinito è il contrario). Verso infinito, ogni logaritmo è infinito d’ordine minore di ogni
monomio, che a sua volta è infinito d’ordine minore di ogni esponenziale (con base maggiore
di 1). Verso zero, come si confrontano logaritmi, monomi ed esponenziali?
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
36
x
2.3.7.3 (relazione con l’asintoticità). Si vede dalle definizioni che f (x) ∼0 g(x) se e solo
se f (x) = g(x) + ox0 (g(x)), cioè f (x) − g(x) = ox0 (g(x)). Infatti,
lim
x→x0
f (x) − g(x)
=0
g(x)
se e solo se
lim
x→x0
f (x)
=1.
g(x)
2.3.7.4 (polinomi di Taylor). Data una funzione f (x) che sia derivabile almeno n volte
in x0 , definiamo il polinomio di Taylor di ordine n in x0 come
Tn (f, x0 ) =
n
X
1 (i)
f (x0 )(x − x0 )i
i!
i=0
1
1
= f (x0 ) + f 0 (x0 )(x − x0 ) + f 00 (x0 )(x − x0 )2 + · · · + f (n) (x0 )(x − x0 )n
2
n!
(nel caso x0 = 0 di solito si chiama polinomio di Mac Laurin).
Vale allora la seguente proprietà:
f (x) = Tn (f, x0 ) + ox0 ((x − x0 )n )
(formula di Taylor con il resto di Peano) ovvero il polinomio di Taylor di ordine n approssima
la funzione vicino a x0 a meno di infinitesimi d’ordine superiore a (x − x0 )n . Si tratta di
dimostrare che un certo limite è nullo, e basta applicare ripetutamente la regola di De
L’Hôpital alla forma indeterminata che si presenta.
2.3.7.5 (polinomi di Taylor con resto di Lagrange). Il “resto di Peano”, indicato come
ox0 ((x − x0 )n ) è utile in teoria, ma non dà indicazioni vere dell’errore commesso sostituendo
la funzione data con il suo polinomio di Taylor. Per avere un maggior controllo sull’errore
si deve ragionare in termini più precisi, usando il teorema di Cauchy (vedi la dimostrazione
della regola di De L’Hôpital), e si ottiene che
f (x) = Tn (f, x0 ) +
1
f (n+1) (ξ)(x − x0 )n+1
(n + 1)!
dove ξ è un punto compreso tra x e x0 . Questo è utile quando si sa stimare il valore massimo
che assume nell’intervallo l’ultima derivata coinvolta.
2.3.7.6 (polinomi di Taylor con resto integrale). Anticipando la nozione di integrale,
ed usando la regola di calcolo per parti ripetutamente con fattore differenziale la parte
monomiale, si ottiene anche una formula che dà l’errore commesso in termini di un integrale:
Z x
(x − t)n (n+1)
f (x) = Tn (f, x0 ) +
f
(t)dt .
n!
x0
2.3.7.7 (esempi). Riportiamo in A.2.20 una tabella dei polinomi di Mac Lauren delle
principali funzioni elementari (per esercizio, controllarne qualcuna!). Si osservi comunque
che in certi casi sfortunati tutto il procedimento dà risultati banali: per esempio la funzione
−2
e−x ha derivate di ogni ordine nulle in 0, dunque polinomio di Taylor nullo, ma non è la
funzione nulla!
2.3.7.8 (esempi). Gli esempi classici di esponenziale, seno e coseno in 0 possono dare
un’idea del processo di approssimazione:
T1
T5
T9
T13
sin x
π
4
π
2
π
T3
2π
T7
T11
T15
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
T4
37
T8
T12
T0
cos x
π
4
π
π
2
T2
2π
T6
T10
T14
T6 T4 T2
T0
ex
T7
T5 T3
T1
2.3.7.9 (applicazioni). Spesso i polinomi di Taylor sono usati per calcolare i valori approssimati (a meno di un errore controllato) di una funzione in un punto assegnato. In particolare per ottenere valori approssimati di costanti numeriche: per esempio per e (funzione ex
calcolata in 1), π/4 (funzione arctan(x) calcolata in 1).
Un’altra importante applicazione è per il calcolo dei limiti: quando non si sa che altro
fare, si cerca di sostituire ogni funzione con il suo polinomio di Taylor fino ad un ordine
opportuno, riconducendo se possibile il problema a un limite di funzioni razionali...
2.3.7.10 (serie di Taylor). Una funzione si dice analitica in un intorno di un punto se in
quel punto è indefinitamente differenziabile (quindi si può scrivere tutta la serie si Taylor),
e la sua serie di Taylor converge al valore della funzione nell’intorno. Questo evidentemente
vale se e solo se i resti dei polinomi di Taylor formano una successione infinitesima.
−2
Per esempio, e−x non è analitica attorno a 0, pur essendo indefinitamente differenziabile.
Naturalmente, una serie di Taylor è una serie di potenze, quindi se ne può determinare
il raggio di convergenza, e nel dominio di convergenza la serie stessa definisce una funzione
analitica (avente come serie di Taylor sè stessa). Per esempio le serie di Mac Laurin di esponenziale, seni e coseni (circolari e iperbolici) hanno raggio di convergenza ∞ (cioè convergono
per ogni x ∈ R), mentre gli altri sviluppi della tavola A.2.20 hanno raggio di convergenza 1.
P∞
2.3.7.11 (derivazione e integrazione per serie). Se k=0 ak xk è serie convergente in
] − R, R[ (intervallo aperto), allora la funzione f (x) da essa definita ammette derivata e
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
38
primitiva che si esprimono in serie
0
f (x) =
∞
X
k=0
kak x
k−1
Z
e
f (x)dx =
∞
X
k=0
ak
xk+1
k+1
che convergono nello stesso intervallo aperto ] − R, R[.
Questo suggerisce il metodo di Frobenius per la soluzione tramite serie delle equazioni
differenziali.
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
2.4
2.4.1
39
Integrali.
Somme e integrali alla Riemann.
2.4.1.1 (motivazioni). Vi sono varie motivazioni per il calcolo integrale. Geometricamente
un problema importante è il calcolo delle aree sottostanti funzioni date, e quindi in generale
il calcolo di aree di regioni del piano (delimitate da funzioni). Sempre da un punto di vista
geometrico, la lunghezza dei tratti di curva si esprime in modo naturale in termini di integrali
(piuttosto difficili, per la verità).
Dinamicamente, il calcolo integrale risolve problemi del tipo inverso di quelli della derivazione: per esempio calcolare lo spazio percorso conoscendo la funzione velocità.
2.4.1.2 (definizione di Riemann). Sia f una funzione positiva e continua definita in un
intervallo chiuso e limitato [a, b] e consideriamo le seguenti due successioni: per ogni n 6 1
dividiamo [a, b] in n intervalli uguali e nell’n-esimo siano Mn e mn massimo e minimo di f
su quell’intervallino,
Pn
somme superiori: Sn = b−a
n P i=1 Mi ,
n
somme inferiori: sn = b−a
i=1 mi ;
n
sono le somme dei rettangoli superiori e inferiori al grafico della funzione:
certamente sn 6 Sm per ogni n, m) e definiamo l’integrale di f da a a b come il limite comune
delle due successioni:
Z
b
f (x)dx = lim Sn = lim sn
a
n→∞
n→∞
e chiaramente ha il significato geometrico di area della zona del piano compresa tra l’asse
delle ascisse e il grafico della funzione. Togliendo l’ipotesi di positività, l’unica cosa che
cambia è l’interpretazione geometrica: le aree sotto le ascisse sono considerate
negative.
R
Il simbolo dovrebbe ricordare che nasce da una somma di aree ( è una S tirata) e dx
indicare la base infinitesima dei rettangolini (in realtà avrà un ruolo molto importante).
2.4.1.3 (altre definizioni, alla Cauchy-Riemann). La definizione si potrebbe dare più
in generale, senza doppia successione e senza ipotesi di continuità su f ma solo di limitatezza,
usando divisioni in intervallini qualsiasi di [a, b] e scegliendo valori qualsiasi della funzione
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
40
in quegli intervalli, ma poi bisogna controllare un limite molto più complicato di una successione: precisamente se gli intervallini sono di ampiezza δi e il valore scelto della funzione è
fi , si definisce δ la massima ampiezza degli intervallini della successione, e si pone
n
X
b
Z
f (x)dx = lim
δ→0
a
δi fi
i=1
se esiste il limite (con δ → 0 per tutte le possibili suddivisioni e scelte di punti all’interno di
ciascun intervallino).
Se le funzioni sono continue, è geometricamente evidente che il limite esiste, e coincide
con quello delle somme inferiori e superiori.
2.4.1.4 (proprietà). Dalla definizione sono evidenti alcune proprietà dell’integrale:
(1) linearità: rispetta la somma e il prodotto per costanti, cioè
Z
b
Z
b
(f (x) + g(x))dx =
a
b
Z
Z
f (x)dx +
a
g(x)dx
e
b
Z
(αf (x))dx = α
a
a
b
f (x)dx
a
(2) additività sugli estremi, cioè
b
Z
c
Z
f (x)dx =
Z
f (x)dx +
a
a
a
Z
f (x)dx = −
dove si pone per convenzione che
f (x)dx
c
b
Z
b
f (x)dx
a
b
(3) monotonia sull’argomento: se f 6 g allora
Z
b
Z
f (x)dx 6
a
b
Z
g(x)dx
b
(dunque
a
f (x)dx > 0 se f (x) > 0)
a
da cui in particolare
Z
|
b
Z
a
b
|f (x)|dx
f (x)dx| 6
a
(4) proprietà della media: esiste c ∈ [a, b] tale che
1
b−a
Z
b
f (x)dx = f (c)
a
(per la proprietà dei valori intermedi di f ).
In alcune occasioni particolarmente facili la definizione di integrale si può usare direttamente: vedi qualche esempio in A.2.21.
2.4.2
Primitive.
2.4.2.1 (definizione). Data una funzione f (x), diciamo primitiva di f (o antiderivata di
f , o integrale indefinito di f ) ogni funzione F (x) tale che F 0 = f . Scriveremo
Z
F (x) = f (x)dx
per seguire la tradizione, e giustificati dai futuri teoremi fondamentali del calcolo integrale.
Si nota subito che se esiste una primitiva F , allora ogni F + c con c ∈ R costante è pure
una primitiva; dunque le primitive sono definite a meno di una costante sugli intervalli: ce
ne dimenticheremo spesso, ma diventeranno molto importanti nello studio delle equazioni
differenziali e in alcuni esempi concreti.
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
41
2.4.2.2 (teoremi fondamentali del calcolo integrale). Si chiamano cosı̀ i due enunciati
che mettono in relazione il calcolo di integrali con il calcolo di primitive: sia f (x) continua
su un intervallo chiuso e limitato
(1) f (x) ammette primitiva, che può esprimersi tramite
Z x
f (t)dt
F (x) =
x0
(si noti che la variabile x è all’estremo di integrazione, x0 qualsiasi punto nel dominio);
(2) se F (x) è una primitiva di f (x) allora l’integrale si calcola tramite
Z
b
f (x)dx = F (b) − F (a)
a
(differenza dei valori della primitiva agli estremi dell’intervallo, spesso si scrive [F (x)]ba ).
Il primo enunciato garantisce l’esistenza, anche se non è quasi mai un metodo di calcolo
esplicito; il secondo enunciato dà un metodo di calcolo esplicito di integrali se si conoscono
le primitive. Per la verifica, basta osservare che, usando la proprietà della media si ha
Z
1 x+ε
F (x + ε) − F (x)
0
= lim
F (x) = lim
f (t)dt = lim f (x + δ) = f (x)
ε→0 ε x
ε→0
δ→0
ε
da un lato, mentre dall’altro risulta
Z
F (b) − F (a) =
b
f (t)dt −
x0
Z
a
Z
f (t)dt =
x0
x0
f (t)dt +
a
Z
b
Z
f (t)dt =
x0
b
f (t)dt .
a
2.4.2.3 (tecniche di calcolo di primitive). In generale, mentre calcolare derivate è una
cosa meccanica, calcolare primitive non è affatto automatico, è spesso difficile, e non è
nemmeno detto che funzioni elementari abbiano primitive che si esprimano in termini di
funzioni elementari. Le principali tecniche di calcolo sono, oltre ad avere una tabella di
derivate (che letta al contrario dà una tabella di primitive!), le tecniche di scomposizione,
sostituzione e calcolo per parti. Qualche tabella di primitive è inserita in A.2.33, mentre le
regole che ora spieghiamo sono riassunte in A.2.28.
2.4.2.4 (scomposizione). Il calcolo di primitive è lineare, cioè commuta con somme e
prodotti per costanti α ∈ R:
Z
Z
Z
Z
Z
(f (x) + g(x))dx = f (x)dx + g(x)dx
e
(αf (x))dx = α f (x)dx .
2.4.2.5 (sostituzioni). Dalla regola della derivazione di funzione composte, otteniamo la
regola di sostituzione di variabile nelle primitive:
Z
Z
f (x)dx = f (φ(t))φ0 (t)dt [ in cui si pone t := ψ(x)]
se x = φ(t) è una biiezione continua con inversa t = ψ(x). Si intende che la sostituzione è
fatta dopo Raver calcolato la primitiva: una espressione più chiara ma meno suggestiva è che
F (φ(t)) = f (φ(t))φ0 (t)dt. Alcune sostituzioni notevoli sono riportate in A.2.29.
2.4.2.6 (Commento su dx e φ0 (t)dt: differenziali). La simbologia si può interpretare
0
pensando che per x = φ(t) abbiamo dx
dt = φ (t), (la doppia notazione per le derivate), e
0
0
poi scrivere dx = φ (t)dt, ovvero d(φ(t)) = φ (t)dt, espressione ragionevole e suggestiva, a
cui non abbiamo dato un senso, che viene chiamata differenziale: si pensa intuitivamente
che una variazione dt della variabile t dia una variazione φ0 (t)dt della quantità φ(t); per
dare un senso preciso bisogna pensare alle approssimazioni lineari, considerando dt una
variabile indipendente. Questo ci permette di scrivere sportivamente l’integrando a destra
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
42
come f (φ(t))d(φ(t)), che ha il pregio di rendere immediata la regola di sostituzione, che
diventa:
Z
Z
f (x)dx = f (φ(t))d(φ(t)) [ in cui si pone t := ψ(x)] .
In A.2.30 riportiamo un confronto per le regole di calcolo in termini di derivate e di differenziali.
2.4.2.7 (calcolo per parti). Dalla regola di derivazione del prodotto otteniamo la regola
di integrazione per parti:
Z
Z
0
f (x)g (x)dx = f (x)g(x) − f 0 (x)g(x)dx
che si legge secondo la filastrocca “la primitiva di un fattore differenziale per uno finito è: il
fattore finito per la primitiva del fattore differenziale, meno la primitiva della primitiva trovata per la derivata del fattore finito”. Usando la notazione dei differenziali prima introdotta,
la regola di integrazione per parti si può scrivere
Z
Z
f (x)d(g(x)) = f (x)g(x) − g(x)d(f (x)) .
2.4.2.8 (sostituzione e parti per integrali). Le regole di sostituzione e calcolo per parti
hanno anche una versione per il calcolo degli integrali:
Z b
Z φ−1 (b)
f (x)dx =
f (φ(t))φ0 (t)dt
a
φ−1 (a)
(si notino gli estremi di integrazione); e
Z b
Z
b
f (x)g 0 (x)dx = f (x)g(x) a −
a
b
f 0 (x)g(x)dx
a
(si noti il calcolo sulla parte integrata).
2.4.3
Primitive di funzioni elementari.
Una tavola di regole e derivate elementari si trova in A.2.28 e successive pagine. Vediamo
qui alcuni casi come esempi di calcolo.
2.4.3.1 (potenze). Dalle derivate si otiene subito che primitive di polinomi sono polinomi,
mentre primitive di polinomi in x e x−1 sono combinazioni di polinomi dello stesso tipo e di
log |x|:
Z
Z
dx
1
α+1
α
x
(α 6= −1)
= log |x|
x dx =
α+1
x
(si noti il ruolo del modulo, calcolando la derivata di log |x| in quanto funzione composta).
2.4.3.2 (funzioni razionali). L’integrazione di funzioni razionali si ottiene con funzioni
elementari sfruttando la decomposizione in frazioni semplici; come risultato otteniamo combinazioni di funzioni razionali, logaritmi e arcotangenti di polinomi si secondo grado senza
radici reali. Uno schema riassuntivo è riportato in A.2.32.
2.4.3.3 (esponenziali e logaritmi). A parte quelli che evidentemente vengono dalle derivazioni, possiamo ottenere una primitiva di log x per parti:
Z
Z
1
log(x)dx = x log(x) − x dx = x log(x) − x = x(log(x) − 1)
x
(usando 1 come fattore differenziale!), come pure una primitiva di xα log(x) con α 6= −1:
Z
Z α+1
xα+1
x
1
xα+1
xα+1
xα+1
xα log(x)dx =
log(x)−
dx =
log(x)−
=
((α+1) log x(x)−1)
α+1
α+1x
α+1
(α + 1)2
(α + 1)2
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
43
(usando xα come fattore differenziale con primitiva xα+1 /(α + 1)), mentre per α = −1
conviene usare la sostituzione log(x) = t, x = et , quindi dx = et dt:
Z
Z
1
log x
t t
1
e dt = t2 = log2 (x)
dx =
x
et
2
2
(si ricordi la sostituzione finale).
Primitive di funzioni del tipo xn ex (n intero positivo) si ottengono facilmente usando ex
come fattore differenziale (che non cambia mai), per esempio:
Z
Z
xex dx = xex − ex dx = xex − ex = ex (x − 1)
Z
Z
2 x
2 x
x e dx = x e − 2xex dx = x2 ex − 2ex (x − 1) = ex (x2 − 2x + 2)
e in generale per induzione.
2.4.3.4 (trigonometriche). A parte quelle ovvie dalle derivazioni, conviene osservare le
primitive di tan x, che si può ottenere per sostituzione t = cos x, dt = − sin(x)dx da cui
Z
Z
Z
dt
sin x
dx = −
= − log |t| = − log | cos x|
tan(x)dx =
cos x
t
(si ricordi il commento sul modulo).
Sempre per parti si ottengono le primitive di x cos(x) e in generale xn cos(x) (usando
come fattori differenziali via via le funzioni trigonometriche cos e sin). Più interessante è
notare il seguente calcolo per la primitiva di ex cos(x), per esempio usando la formula per
parti due volte:
Z
Z
Z
ex cos(x)dx = ex cos(x) + ex sin(x)dx = ex cos(x) + ex sin(x) − ex cos(x)dx
(sempre ex fattore differenziale) da cui si ricava
Z
1
ex cos(x)dx = ex (cos(x) + sin(x)) .
2
Una simile acrobazia permette di ricavare una primitiva di cos2 (x):
Z
Z
Z
Z
2
2
2
cos (x)dx = sin(x) cos(x)+ sin (x)dx = sin(x) cos(x)+ (1−cos (x))dx = sin(x) cos(x)+x− cos2 (x)dx
da cui
Z
1
(x + sin(x) cos(x)) .
2
Si poteva anche usare una formula di trigonometria:
Z
Z
1 − cos(2x)
1
1
sin2 (x)dx =
dx = (x − sin(2x)) = (x − sin x cos x) .
2
2
2
cos2 (x)dx =
Un caso interessante ma facile è
r
Z
Z
Z
1
cos x
d(sin x)
1 + sin x
dx =
dx =
= settanh(sin x) = log
2
cos x
cos2 x
1 − sin x
1 − sin x
(abbiamo fatto una sostituzione sportiva).
2.4.3.5 (archi). Usando la sostituzione cos t = x, dunque − sin(t)dt = dx, si calcola
Z
Z
p
arccos(x)dx = − t sin(t)dt = t cos t − sin t = x arccos(x) − 1 − x2
e similmente per gli altri archi.
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
44
2.4.3.6 (iperboliche). Di solito si trattano analogamente alle funzioni trigonometriche, ma
ammettono anche formule legate alla definizione diretta in termini di esponenziali.
2.4.3.7 (settori). Simili agli archi.
2.4.3.8 (alcuni radicali notevoli). A parte i casi che provengono dalle derivare di arc e
sett, conviene tener presente
Z p
Z
p
x
1 2
a2
a arcsin + x a2 − x2
a2 − x2 dx = a2 cos2 (t)dt = (t + sin t cos t) =
2
2
a
che si fa√con la sostituzione x = a sin t, da cui dx = a cos(t)dt. Similmente si procede per i
casi di x2 ± a2 usando sostituzioni con funzioni iperboliche.
Per esercizi di calcolo di primitive, si veda A.2.22, ma tutte le tabelle di integrali A.2.33
sono da considerare esempi (cioè, da saper calcolare!).
2.4.3.9 (primitive non elementari). Vi sono poi casi notevoli di funzioni continue, che
dunque ammettono primitive, ma tali che le primitive non si esprimono in termini di funzioni
elementari note, ma per l’appunto definiscono altre e importanti funzioni: si veda per esempio
A.2.34
2.4.4
Applicazioni.
2.4.4.1 (aree). Una delle motivazioni principali per il calcolo integrale era il calcolo di
superficie di zone del piano: vediamo qualche esempio.
(1) ellissi e cerchi: usando la solita equazione canonica si tratta di calcolare integrali della
forma
Z p
x
b p
b
a2 − x2 dx = ab arcsin + x a2 − x2
2
a
a a
che è possibile ma un po’ contaccioso: si trova che la superficie del settore da x = a cos θ a
x = a è
Z a
bp 2
2
a − x2 dx = ab(θ − cos θ sin θ)
a cos θ a
in particolare la superficie totale (per θ = π) è abπ, mentre la superficie dello spicchio dal
centro verso il settore è abθ (bisogna sommare la superficie ab cos θ sin θ del triangolo dal
centro)
a cos ϑ
b sin ϑ
ab(ϑ − cos ϑ sin ϑ)
abϑ/2
Si poteva anche fare il conto parametrico:
Z
Z
Z
2 y(x)dx = 2 b sin(θ)d(a cos θ) = −2ab sin2 (θ)dθ = ab(cos θ sin θ − θ)
da cui poi gli stessi risultati. In particolare per un cerchio πr2 è l’area, e θr2 l’area di uno
spicchio di angolo 2θ (l’area sottensa nel cerchio unitario ad un angolo θ è θ/2).
(2) iperboli: con le equazioni canoniche, e quasi gli stessi conti, abbiamo
Z
Z
Z
2 y(x)dx = 2 b sinh(θ)d(a cosh θ) = 2ab sinh2 (θ)dθ = ab(cosh θ sinh θ − θ)
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
45
da cui l’area tra x = 1 = a cosh 0 e x = cosh θ risulta ab(cosh θ sinh θ − θ), e dunque lo
spicchio visto dal centro (bisogna questa volta al triangolo sottrarre l’integrale) è abθ.
a cosh ϑ
b sinh ϑ
abϑ/2
ab(cosh ϑ sinh ϑ − ϑ)
In particolare θ è il doppio dell’area del “triangolo curvo” tra centro, vertice e un punto
dell’iperbole equilatera (interpretazione geometrica del radiante iperbolico).
(3) parabole: usando y = px2 abbiamo
Z a
Z a
2
px2 dx = 2
px2 dx = pa3
3
−a
0
e quindi l’area dentro alla parabola sotto la quota pa2 vale 43 pa3 .
a
pa2
pa3 /3
4pa3 /3
(4) integrali trigonometrici: è facile calcolare l’area sotto un semiciclo del seno:
Z π
sin xdx = [− cos x]π0 = 2 .
0
Altri problemi in A.2.23
2.4.4.2 (lunghezze di curve). Più sorprendentemente, un ragionamento elementare permette di capire che anche la lunghezza delle curve nel piano può essere espressa in termini
di integrali: se la curva ha equazione y = f (x) possiamo calcolarne la lunghezza usando
Z
b
p
1 + f 0 (x)2 dx
a
e se la curva è descritta come (x(t), y(t)) usando un parametro t, allora la sua lunghezza è
calcolata da
Z tb p
x0 (t)2 + y 0 (t)2 dt
ta
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
46
come si può capire dal disegno:
√
f 0(x)dx
√
1+f 0(x)2 dx
x0(t)2 +y 0(t)2 dt
y 0(t)dt
x0(t)dt
dx
Vediamo per esempio:
(1) ellissi e circonferenze: Si tratta di calcolare
2
Z p
2
a2 sin θ + b2 cos2 θ dθ = 2a
Z r
1−
a2 − b2
cos2 θ dθ
a2
oppure usando l’equazione cartesiana:
Z r 4
2
a − (a2 − b2 )x2
dx
a
a2 − x2
che non ha primitiva elementare (la funzione che definisce si chiama per l’appunto integrale
ellittico) a meno che non sia a = b, nel qual caso si ottiene la lunghezza della circonferenza
che è 2aπ.
(2) iperboli: si ricade nello stesso tipo di conti precedenti, per esempio usando le equazioni
cartesiane,
Z r 4
−a + (a2 + b2 )x2
2
dx
a
x2 − a2
e dunque si ottengono funzioni non elementarmente√integrabili comunque; anche nel caso
equilatero, usando una parametrizzazione del tipo t, t2 − 1 troviamo
Z r 2
2t − 1
dt
2
t2 − 1
e usando parametrizzazione con funzioni iperboliche troviamo sotto integrale la radice di
sinh2 θ + cosh2 θ = cosh(2θ).
(3) parabole: per le lunghezze di archi di parabole la cosa migliora: usando y = px2
abbiamo la primitiva
Z p
p
1 1 + (2px)2 dx =
2px 1 + (2px)2 + settsinh(2px)
4p
e basta calcolare tra 0 e a per ottenere la lunghezza voluta.
(4) curve trigonometriche: si ottengono integrali ellittici, quindi non elementari.
Altri problemi in A.2.24
2.4.4.3 (superficie e volumi di rotazione). Considerata una curva y = f (x) come un
profilo da far ruotare attorno all’asse delle ascisse, è un problema interessante quello di
calcolare superficie e volume della figura ottenuta per rotazione. Anche in questo caso, un
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
47
facile ragionamento suggerito dal disegno:
√
√
1+f 0(x)2 dx
f(x)
x0(t)+y 0(t)2 dt
y(t)
dice che la superficie sarà calcolata dall’integrale
Z b
p
S = 2π
f (x) 1 + f 0 (x)2 dx
ovvero
Z
tb
S = 2π
y(t)
a
p
x0 (t)2 + y 0 (t)2 dt
ta
e il volume dall’integrale
Z
V =π
a
b
f (x)2 dx
Z
ovvero
tb
V =π
y(t)2 x0 (t)dt
ta
oppure (sotto opportune condizioni, esprimendo il profilo tramite g(y))
Z c
Z tb
V = 2π
yg(y)dy
ovvero
V = 2π
y(t)x(t)y 0 (t)dt
0
ta
(basta sostituire 2π con α se vogliamo il solido ottenuto con rotazione parziale di angolo
α 6 2π). Vediamo per esempio:
(1) ellissi e circonferenze: per la superficie di ellissi troviamo comunque integrali ellittici,
a parte il caso della circonferenza, che dà la superfice sferica:
Z
p
2π a sin(θ) a2 sin2 θ + a2 cos2 θ dθ = −2a2 π cos θ
(calcolato tra 0 e π dà 4πa2 );
e per il volume, l’ellisse usuale ruotata attorno all’asse delle x dà luogo ad un ellissoide
di rotazione di volume pari a
Z
Z
1
π b2 sin2 (θ)d(a cos θ) = πab2 (1 − cos2 θ)d(cos θ) = πab2 cos θ − cos3 θ
3
(che calcolato tra 0 e π dà 34 πab2 , in particolare 43 πr3 per il volume della sfera).
(2) iperboli: per le superficie non vi sono primitive elementari di solito, mentre per il
volume di rotazione attorno all’asse delle ascisse abbiamo
Z
Z
1
π b2 sinh2 (θ)d(a cosh θ) = πab2 (cosh2 θ − 1)d(cosh θ) = πab2
cosh3 θ − cosh θ
3
(che poi va calcolato tra 1 = cosh 0 e x = cosh θ).
(3) parabole: per fare i calcoli
per la padella parabolica, visto che ruotiamo attorno
√
all’asse x, conviene usare y = x, e gli integrali sono elementari.
(4) integrali trigonometrici: si ottiene subito che il volume generato dalla rotazione
attorno alle ascisse di un semiciclo del seno ha valore π 2 /2.
Altri problemi in A.2.27
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
48
2.4.4.4 (baricentri e formule di Guldino). Dalle formule precedenti, introducendo la
definizione di baricentro, si ottengono i teoremi di Guldino(-Pappo):
(a) definiamo la coordinata ȳ del baricentro della curva come
p
Rb
f (x) 1 + f 0 (x)2 dx
a
ȳ = R b p
1 + f 0 (x)2 dx
a
(il denominatore è la lunghezza ` della curva), e possiamo scrivere la formula della superficie
come S = 2π ȳ` ovvero la superficie è pari al prodotto della lunghezza della curva per quella
della circonferenza descritta dal baricentro;
(b) definiamo la coordinata ȳ del baricentro della superficie sottesa alla curva (si può fare
più in generale per una zona del piano da un lato rispetto all’asse di rotazione) come
Rc
yg(y)dy
ȳ = R0 c
g(y)dy
0
(il denominatore è la superficie S interessata), e possiamo scrivere la formula del volume
come V = 2π ȳS ovvero il volume è pari al prodotto della superficie ruotata per la lunghezza
della circonferenza descritta dal baricentro.
Questi risultati sono spesso utili per calcolare le posizioni dei baricentri, per esempio per
regioni di (semi) circonferenze, cerchi, sfere ecc.:
• una semicirconferenza ha lunghezza πr e per rotazione genera una sfera di superficie
4πr2 ; quindi il suo baricentro ha posizione 2r
π .
• un semicerchio ha area 12 πr2 e per rotazione genera una sfera di volume 43 πr3 ; quindi
4r
il suo baricentro ha posizione 3π
.
Come detto le formule si possono usare più in generale (ma si giustificano bene con il
calcolo in più variabili) e un esempio classico è superficie e volume del toro che si ottiene
ruotando un cerchio di raggio r il cui centro dista R > r dall’asse: la superficie è (2πR)(2πr)
e il volume (2πR)(πr2 ).
2.4.5
Integrali generalizzati.
Si parla di integrali generalizzati quando si presentano casi di funzioni non limitate (definite
su un intervallo limitato, ma non chiuso), oppure per funzioni infinitesime definite su intervalli
non limitati (semirette di solito). Si ha allora un modo naturale di estendere la definizione di
integrale, usando un limite di integrali su intervalli chiusi e limitati per raggiungere la zona
di integrazione voluta.
2.4.5.1 (definizione). Se abbiamo una funzione continua definita sull’intervallo [a, b[ (risp.
]a, b]) diciamo integrale generalizzato se esiste il limite
Z
a
b
Z
f (x)dx = lim−
β→b
β
Z
f (x)dx
( risp. = lim+
α→a
a
b
f (x)dx )
α
e diremo che su tale intervallo la funzione è integrabile; diremo che diverge se il limite vale
∞, diremo che non è integrabile su tale intervallo se il limite non converge.
2.4.5.2 (criteri di integrabilità generalizzata). È facile rendersi conto che se f 6 g
allora: se g converge su un intervallo, allora f anche; e se f diverge, allora anche g diverge
(criterio del confronto).
Se poi due funzioni sono asintotiche all’estremo di integrazione generalizzata, allora hanno
esattamente lo stesso carattere di convergenza su quell’intervallo (criterio di asintoticità).
2.4.5.3 (attenzione ai doppi limiti!). Si sarebbe tentati di dare la stessa definizione con
due estremi liberi:
Z b
Z β
f (x)dx = lim+ lim−
f (x)dx
a
α→a
β→b
α
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
49
e si può fare, ma bisogna stare attenti al calcolo del doppio limite: si devono davvero usare
tutti gli intervalli [α, β] senza relazioni tra α e β.
Rα
Per esempio per una funzione dispari come sin(x) si ha −α sin(x)dx = 0 per ogni α, ma
R∞
l’integrale −∞ sin(x)dx non esiste.
2.4.5.4 (esempi). Vi sono esempi di integrali generalizzati molto importanti, che mostrano
come regioni illimitate del piano possono avere o meno area finita: vederlo “ad occhio” è
difficile!
(1) L’esempio più importante è forse quello di x1α con α > 1 sull’intervallo [1, +∞[:
abbiamo
Z +∞
dx
= lim [log x]β1 = lim log β = +∞
β→+∞
β→+∞
x
1
(quindi non integrabile), mentre per α > 1 si ottiene:
Z
+∞
1
dx
1
1
1
= lim
[x1−α ]β1 = lim
(β 1−α − 1) =
α
β→+∞
β→+∞
x
1−α
1−α
α−1
(quindi integrabile). Per esercizio, si studino queste funzioni su [0, 1] e [0, +∞[. Questo
calcolo è uno dei modi più pratici per capire che la serie armonica (somma di tutti gli inversi
dei numeri naturali) è divergente, mentre la somma di tutti gli inversi dei quadrati esiste
finita...
1
xα
1
x2
1
x
1
x
+∞
+∞
< +∞
1
α−1
Si osservi anche che il corno (da 1 a ∞) ottenuto dalla rotazione attorno alle ascisse del
ramo di iperbole 1/x ha volume finito di valore π (notare la stranezza: l’area non è finita, il
volume sı̀: perché?).
(2) casi di esponenziali: per esempio
Z
+∞
e
0
−x
Z
dx = lim
β→+∞
β
e−x dx = lim [−e−x ]β0 = lim −e−β + 1 = 1
0
β→+∞
β→+∞
2
(integrabile), da cui per confronto si ha l’integrabilità su [0, +∞[ di e−x (che non ha primitiva
elementare).
In generale si ha che xn e−x è integrabile su [0, +∞[ con integrale n! (il fattoriale di n, non
c’è connotato di sorpresa).
(3) casi di logaritmi: con un calcolo diretto, o con un ragionamento geometrico portandosi
al caso precedente, si vede che log x su [0, 1] è integrabile con integrale −1.
(4) la funzione tan x non è integrabile in [0, π/2];
(5) valori noti:
r
Z +∞
Z +∞
2
2
1
1 π
e−ax =
e
xe−ax =
.
2
a
2a
0
0
Altri problemi in A.2.25 e in A.2.26.
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
2.4.6
50
Approssimazioni e sviluppi di Fourier.
Data una funzione periodica, è un problema interessante cercare se essa può essere approssimata tramite funzioni periodiche semplici come quelle trigonometriche.
2.4.6.1 (polinomi trigonometrici o di Fourier). Diciamo polinomio trigonometrico una
espressione del tipo
n
X
Tn (x) =
(ak cos(kx) + bk sin(kx))
k=0
(si noti che a0 moltiplica la costante 1, mentre b0 è irrilevante). Tale espressione si può anche
esprimere
n
X
Tn (x) = a0 +
ck cos(kx − φk )
k=1
p
dove ck = a2k + b2k e φk è tale che cos φk = ak /ck e sin φk = −bk /ck (basta usare le formule
di differenza per i coseni); i coefficienti ck si dicono ampiezze, gli angoli φk si chiamano fasi.
È chiaro che i polinomi trigonometrici sono funzioni continue, infinitamente derivabili
(termine a termine, essendo somme finite). Che cosa succede se sommiamo infiniti termini (in
generale si potranno avere funzioni con discontinuità)? Possiamo ottenere qualsiasi funzione
periodica (di periodo 2π)?
Questo è un esempio di sovrapposizione di tre armoniche (k = 1, 7, 31):
2.4.6.2 (altri periodi). Per studiare funzioni di periodo T diverso da 2π (funzioni f (x)
tali che f (x + T ) = f (x) per ogni x ∈ R), basterà usare come argomento delle funzioni
trigonometriche i termini kωx con ω = 2π
T invece di kx.
2.4.6.3 (osservazione importante). Per cercare di approssimare una funzione periodica
di periodo 2π tramite polinomi trigonometrici, conviene prima osservare i valori dei seguenti
integrali:
Z
Z
2π
2π
sin2 (kx)dx = π
cos2 (kx)dx =
0
0
se k 6= 0 (naturalmente per k = 0 l’integrale di cos(kx) = 1 vale 2π),
Z
2π
Z
cos(kx) cos(hx)dx =
0
2π
sin(kx) sin(hx)dx = 0
0
per ogni h 6= k, e infine
Z
2π
cos(kx) sin(hx)dx = 0
0
per ogni h, k. Queste formule (di facile verifica per esercizio) ci dicono che le funzioni che
entrano nei polinomi trigonometrici moltiplicate tra di loro hanno integrale nullo su ogni
periodo, tranne nei casi banali (i quadrati, che sono funzioni positive, e quindi hanno integrali
positivi).
2.4.6.4 (sviluppi di Fourier). Consideriamo una funzione f (x) periodica di periodo 2π e
scriviamo
n
a0 X
+
(ak cos(kx) + bk sin(kx))
fn (x) =
2
k=0
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
dove
ak =
1
π
Z
51
2π
f (x) cos(kx)dx
e
bk =
0
1
π
Z
2π
f (x) sin(kx)dx
0
(l’integrale può essere calcolato su un qualunque periodo). Valgono allora le seguenti proprietà:
(1) (convergenza in media quadratica) l’integrale
Z
2π
(f (x) − fn (x))2 dx
0
è minimo tra tutti i polinomi trigonometrici di grado limitato da n, e tende a 0 quando n
tende a ∞;
(2) (formula di Parseval)
Z
0
∞
2π
f (x)2 dx = π
X
a20
+π
(a2k + b2k )
2
k=0
(in particolare ak , bk → 0, essendo la serie convergente).
Queste proprietà dicono in particolare che i polinomi trigonometrici fn (x) approssimano
f (x). Il limite di tali polinomi si chiama sviluppo o serie di Fourier di f (x). Quindi ogni funzione periodica si può approssimare come sovrapposizione (somma) di armoniche di periodo
multiplo del periodo fondamentale della funzione, con ampiezze che descrescono al crescere
delle armoniche (interpretazione musicale delle serie di Fourier).
2.4.6.5 (sviluppi di funzioni pari o dispari). Si osservi in particolare che se una funzione
(periodica di periodo 2π) è pari allora nel suo sviluppo di Fourier compaiono solo coseni; se
invece è dispari, nel suo sviluppo di Fourier compaiono solo seni.
2.4.6.6 (esempi). Facciamo vedere attraverso alcuni esempi che le serie di Fourier possono
descrivere funzioni non derivabili o anche discontinue:
(1) (onda quadra)
(2) (dente di sega)
(3) (onda triangolare)
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
52
2.4.6.7 (convergenza puntuale). Sotto opportune condizioni di regolarità (per esempio
che la funzione sia monotona a tratti), detti f (x− ) e f (x+ ) i limiti sinistro e destro di
f in x, abbiamo che il valore in x dello sviluppo di Fourier di f è la media aritmetica
1
−
+
2 (f (x ) + f (x )) dei due limiti (in particolare è il valore della funzione, se essi coincidono).
2.4.6.8 (sviluppi di funzioni non periodiche). Qualche volta è conveniente approssimare
tratti di funzioni qualsiasi con serie di Fourier, e ciò si può fare in vari modi. Prima di tutto
si sceglie un intervallo su cui la funzione è definita, per esempio usiamo [0, T ] per fissare le
idee.
Possiamo allora pensare alla funzione ristretta a quell’intervallo, riportata periodicamente
sulla retta reale, e studiare la serie di Fourier corrispondente.
In alternativa, possiamo considerare la funzione pari sull’intervallo [−T, T ] e studiare
lo sviluppo di Fourier corrispondente (sviluppo di soli coseni), oppure la funzione dispari
sull’intervallo [−T, T ] e studiare lo sviluppo di Fourier corrispondente (sviluppo di soli seni).
2.4.6.9 (sviluppi complessi di Fourier). Usando opportuni coefficienti complessi γk , e
le formule di Eulero, possiamo anche scrivere ogni polinomio trigonometrico nella seguente
forma
n
X
Tn (x) =
γk eikx .
k=−n
I calcoli degli integrali dei prodotti degli addendi elementari danno allora
(
Z 2π
2π se k = h
ikx −ihx
e e
dx =
0
se k 6= h.
0
Di conseguenza se vogliamo calcolare i coefficienti dello sviluppo
∞
X
f (x) =
γk eikx
k=−∞
(per una funzione f (x) periodica di periodo 2π) abbiamo che
γk =
1
2π
Z
0
2π
f (x)e−ikx .
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
2.5
2.5.1
53
Equazioni differenziali.
Problema generale.
2.5.1.1. Vi sono varie situazioni in cui di una funzione si conoscono alcune proprietà che coinvolgono le derivate (o eventualmente le primitive), in base alle quali si vorrebbe identificare
la funzione stessa.
Il caso più semplice, naturalmente, è proprio la ricerca di primitive: si tratta di risolvere
in f l’equazione f 0 = g dove g è una funzione data.
Un caso semplice ma più sofisticato è trovare le funzioni f tali che f 0 = f ; se ne conosce
certamente una (f (x) = ex ), ma quali altre esistono?
2.5.1.2 (integrale generale). Il problema generale delle equazioni differenziali è il seguente:
data una espressione
F (x, f, f 0 , . . . , f (n) ) = 0
determinare tutte le funzioni f (x) differenziabili almeno n volte che soddisfano alla condizione
posta; si parla allora di “trovare l’integrale generale” dell’equazione F = 0.
2.5.1.3 (problemi di Cauchy). Eventualmente determinare tra le soluzioni possibili quelle
che soddisfano ad ulteriori proprietà (che di solito sono avere assegnati valori della funzione
e/o delle sue derivate in fissati punti iniziali, o agli estremi del dominio di f ); si parla allora
di problema di Cauchy per l’equazione differenziale.
2.5.1.4. Solo in casi particolari si sanno risolvere esplicitamente questi problemi!
2.5.1.5 (ordine). Si dice ordine di una equazione differenziale F = 0 il massimo ordine di
derivazione dell’incognita funzione f che compare.
2.5.1.6 (grado). Se F è espressione polinomiale nella funzione incognita f e nelle sue
derivate, si dice grado della equazione differenziale F il grado in quanto polinomio nelle
variabili f e sue derivate.
Si dice lineare se è di primo grado. Quindi un sistema lineare di ordine n è della forma
f (n) + an−1 (x)f (n−1) + · · · + a1 (x)f 0 + a0 (x)f = b(x)
con ai (x), b(x) funzioni arbitrarie. Si dice omogeneo se b(x) = 0. È facile vedere che vale un
risultato tipo “Rouché-Capelli”: le soluzioni del sistema completo sono date dalla somma di
una particolare con le soluzioni del sistema reso omogeneo.
2.5.1.7 (coefficienti costanti). Una equazione differenziale si dice a coefficienti costanti
se non compare la variabile indipendente x (se non al più nel termine noto). Per le equazioni
differenziali lineari a coefficienti costanti disponiamo di una teoria generale per trovare le
soluzioni.
2.5.2
Prim’ordine.
2.5.2.1 (forma generale). Una equazione differenziale del prim’ordine è una espressione
F (x, f, f 0 ) = 0 in cui compaiono x, f, f 0 . Si dice in forma normale se è del tipo f 0 = F (x, f ).
2.5.2.2 (variabili separabili). Si dice a variabili separabili se può essere portata nella
forma
f 0 = F1 (x)F2 (f )
nel qual caso si può ottenere l’integrale generale nel seguente modo: si integra l’espressione
f 0 /F2 (f ) = F1 (x) tramite
Z
Z
df
= F1 (x)dx
F2 (f )
ottenendo una espressione G2 (f ) = G1 (x) (costanti inglobate in G1 ); se ora la funzione G2
è (almeno localmente) invertibile, ricaviamo f = G−1
2 (G1 (x)) come volevamo.
Nel procedimento ci sono due difficoltà: la prima trovare primitive, la seconda invertire
una funzione spesso non facile.
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
54
2.5.2.3 (esempi di equazioni a variabili separabili).
(1) equazioni logistiche: sono equazioni del tipo f 0 = af (1 − bf ) con a, b costanti.
Dall’integrazione della equazione
df
= adt
f (1 − bf )
usando le frazioni semplici
df
bdf
+
= adt
f
1 − bf
si ottiene l’espressione
log
f
= at + c
1 − bf
da cui
f
= Ceat
1 − bf
(da qui si può calcolare facilmente C conosendo f (0)) e si può esplicitare
f (t) =
Ceat
.
1 + bCeat
(2) equazioni delle popolazioni: con a > 0 e b = 0 è il modello di Malthus (crescita
esponenziale illimitata), con a > 0 e b > 0 è il modello di Verhulst (1/b è il limite delle
soluzioni quando t cresce).
(3) caduta dei gravi: nel caso di caduta nel vuoto si ha f 00 = g con g costante (si risolve
subito con due integrazioni, e la velocità v = f 0 diverge con la formula classica v = gt + v0 ,
e spazio percorso f = 12 gt2 + v0 t + f0 );
nel caso di attrito proporzionale alla velocità (risp. quadrato della velocità) si hanno
equazioni del tipo mf 00 = mg − hf 0 (risp. mf 00 = mg − hf 02 ) con m, h costanti. Si tratta
di una equazione riconducibile al prim’ordine usando v = f 0 per esempio nel primo caso si
integra
mdv
= dt
mg − hv
ottenendo
log(mg − hv) = −
h
t+c
m
da cui
h
mg − hv = Ce− m t .
In generale abbiamo allora
mg C − h t
− e m
h
h
da cui si vede che la velocità asintoticamente è costante e finita (se poi v(0) = 0 abbiamo
C = mg, e otteniamo una formula più semplice).
(4) equazione della chimica: la concentrazione del risultato di una reazione con due
reagenti può essere del tipo f 0 = k(a − f )(b − f ) (k, a, b costanti, le ultime due rappresentano
le concentrazioni iniziali dei reagenti). Da
v(t) =
df
= kdt
(a − f )(b − f )
usando le frazioni semplici
df
df
−
= k(b − a)dt
a−f
b−f
si può integrare
log
b−f
= k(b − a)t + c
a−f
e infine ricavare
f (t) =
da cui
b−f
= Cek(b−a)t
a−f
aCek(b−a)t − b
Cek(b−a)t − 1
(e si nota che per t → ∞ la funzione tende al minimo tra a e b, con una velocità che dipende
dal parametro k).
2.5.2.4 (lineari). Una equazione lineare del prim’ordine è della forma
f 0 + a(x)f = b(x)
con a(x), b(x) funzioni arbitrarie. Si dice omogenea se il termine costante b(x) è nullo.
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
55
Similmente al caso delle equazioni lineari, anche qui è vero che le soluzioni della equazione
completa si ottengono sommandone una particolare alle soluzioni del sistema reso omogeneo.
Quindi si studiano separatamente i due problemi: soluzioni del sistema omogeneo, soluzione
particolare.
Per l’equazione omogenea, essendo a variabili separabili, si ottiene
f (x) = ce−
R
a(x)dx
= ce−A(x)
con c costante arbitraria. Si osservi quindi che l’insieme delle soluzioni dipende da una
costante c (e sono tutti i multipli di una fissata funzione).
Per trovare poi una soluzione particolare, si usa il metodo di “variazione della costante”:
si cerca una soluzione del tipo f (x) = c(x)e−A(x) dove c(x) è funzione di x da determinare
affinché sia risolta l’equazione completa:
(c(x)e−A(x) )0 + a(x)c(x)e−A(x) = b(x)
che dà per c(x) l’equazione differenziale c0 (x) = b(x)eA(x) che si integra.
Riunendo i due risultati, abbiamo che la soluzione generale è data da
Z
f (x) = ce−A(x) + e−A(x) b(x)eA(x) dx
con c costante arbitraria.
Il problema di Cauchy ponendo quale condizione f (0) = f0 ? Oppure f 0 (0) = f00 ?
Per esempi e problemi si veda A.2.35
2.5.2.5 (esempi di equazioni lineari).
(1) Problemi di riempimento/svuotamento: una quantità Q(t) varia in aumento con velocità vi (eventualmente in proporzione a Q stessa), e in diminuzione con velocità vo (anch’essa
eventualmente in proporzione a Q stessa). Si chiede di determinare Q(t) data Q(0). La
funzione cercata soddisfa nei quattro casi possibili ad equazioni differenziali rispettivamente
Q0 = vi − vo ,
Q0 = vi Q − vo ,
Q0 = vi − vo Q ,
Q0 = (vi − vo )Q ,
che comportano soluzioni del tipo
Q(t) = (vi −vo )t+c ,
Q(t) =
vo c v i t
+ e ,
vi vi
Q(t) =
vi c −vo t
+ e
,
vo vo
Q(t) = ce(vi −vo )t ,
a cui imporre la condizione iniziale per determinare c.
(2) Problemi di riscaldamento/raffreddamento: una quantità T (t) varia in aumento proporzionalmente tramite kf > 0 a Tf − T , e in diminuzione proporzionalmente tramite ka > 0
a T − Ta . Si chiede di determinare T (t) data T (0). La funzione soddisfa all’equazione
differenziale
T 0 = kf (Tf − T ) − ka (T − Ta ) = −(kf + ka )T + (kf Tf + ka Ta )
che dà
T (t) =
c
kf Tf + ka Ta
+
e−(kf +ka )t
kf + ka
kf + ka
(si studi in particolare il limite verso infinito).
(3) Problemi di decadimenti: una data sostanza S tende a cambiare forma con un tasso di variazione k > 0 in propozione alla sua stessa quantità. Risolve quindi l’equazione
differenziale
S 0 = −kS
che si integra in
S(t) = ce−kt
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
56
In questi casi è classico definire il tempo di dimezzamento di S(t), che è ben definito indipendentemente dal valore iniziale della funzione: cercare t1/2 tale che S(t + t1/2 ) = S(t)/2
porta alla relazione kt1/2 = log 2 che dipende dalla costante di decadimento k ma non dal
valore iniziale di S (che determina la costante c).
(4) Problemi di diluizione: sono tutti i problemi in cui si ha una miscela omogenea di
due sostanze (tipo acqua e sale) e vi sono immissioni di miscela con proporzioni diverse, e
prelievi si vario tipo (della miscela, o solo di una sostanza come nell’evaporazione), prelievi
e immissioni che possono essere indipendenti o dipendenti dalla quantità di miscela presente
(o mancante). Di solito è interessante determinare sia le quantità delle sostanze presenti, sia
la percentuale di una sul totale.
Per esempio se supponiamo che gli aumenti siano dati uno costante di velocità vi e
percentuale di sale pi , un altro variabile con coefficiente ki in funzione del volume presente
V , e che le diminuzioni siano per evaporazione costante con velocità vo e una variabile in
funzione ko del volume V , allora il tutto è governato dalle equazioni differenziali seguenti
per V (volume totale) e S (quantità di soluto):
V 0 = vi + ki V − vo − ko V = (vi − vo ) + (ki − ko )V
S 0 = vi pi + ki pi V − ko pV = vi pi + ki pi V − ko S
e poi si ottiene p = S/V variabile nel tempo. La prima equazione si risolve per V , che poi
entra nella seconda come termine noto (si trova una equazione differenziale lineare, ma non
separabile di solito).
Per esempi e problemi si veda A.2.36
2.5.3
Second’ordine.
2.5.3.1 (forma generale). Una equazione differenziale del prim’ordine è una espressione
F (x, f, f 0 , f 00 ) = 0 in cui compaiono x, f, f 0 , f 00 . Si dice in forma normale se è del tipo
f 00 = F (x, f, f 0 ).
2.5.3.2 (casi che si riconducono al prim’ordine). Vi sono alcuni casi in cui possiamo
ricondurci ad equazioni del prim’ordine, a meno del calcolo di una primitiva:
(1) se non compare la f abbiamo G(x, f 0 , f 00 ) = 0 e ponendo v = f 0 risulta f 00 = v 0 e
l’equazione diventa G(x, v, v 0 ) = 0;
(2) se non compare la x abbiamo G(f, f 0 , f 00 ) = 0 e ponendo p = f 0 risulta f 00 = p0 =
df dp
dp
dp
dp
dx = dx df = p df e l’equazione diventa G(f, p, p df ) = 0; si usa allora f come variabile
indipendente, si trova p(f ), e infine si integra l’equazione f 0 = p(f ).
2.5.3.3 (lineari). Una equazione lineare del second’ordine è della forma
f 00 + a(x)f 0 + b(x)f = c(x)
con a(x), b(x), c(x) funzioni arbitrarie. Si dice omogenea se il termine costante c(x) è nullo.
Sotto ipotesi che le funzioni coinvolte siano continue in un intervallo chiuso e limitato,
vale il teorema di esistenza e unicità delle soluzioni del problema di Cauchy in cui vengono
prescritti valori iniziali delle funzione e della sua derivata in un fissato punto (teorema di
Cauchy, difficile).
2.5.3.4 (integrale generale per equazioni differenziali lineari). Similmente al caso dei
sistemi algebrici lineari, anche qui è vero che le soluzioni della equazione completa si ottengono sommandone una particolare alle soluzioni del sistema reso omogeneo. Quindi si studiano
separatamente i due problemi: soluzioni del sistema omogeneo, soluzione particolare.
Le soluzioni di una equazione lineare omogenea del second’ordine formano un insieme
generato da due qualunque soluzioni indipendenti (una non multipla dell’altra): se f1 e f2
sono soluzioni, allora l’integrale generale è del tipo c1 f1 + c2 f2 con c1 , c2 ∈ R arbitrarie. Si
dice che è uno spazio vettoriale di dimensione 2 di funzioni.
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
57
2.5.3.5 (equazione di Eulero). È uno dei rari esempi di equazioni a coefficienti non
costanti di cui si sanno scrivere le soluzioni:
f 00 +
a 0
b
f + 2f = 0
x
x
che sono (combinazioni di) funzioni della forma xα per x > 0.
2.5.3.6 (lineari a coefficienti costanti). Un caso in cui sappiamo dare ricette generali è
quello in cui i coefficienti a, b sono costanti.
In questo caso, motivati dalla ricerca di soluzioni del tipo esponenziale eαx , per l’equazione
omogenea si studia l’equazione caratteristica
X 2 + aX + b = 0
e se ne ottengono gli zeri α1,2 . Conviene distinguere i casi a seconda che siano numeri reali
o complessi:
(1) se α1,2 ∈ R sono reali distinti, allora eα1 x e eα2 x sono soluzioni della equazione
omogenea, e le soluzioni sono della forma c1 eα1 x + c2 eα2 x ;
(2) se α1,2 ∈ R sono reali coincidenti, allora eαx e xeαx sono soluzioni della equazione
omogenea, e le soluzioni sono della forma c1 eαx + c2 xeαx ;
(3) se α1,2 ∈ C non sono reali, allora sono distinti della forma α ± iβ e potremmo usare le
esponenziali complesse eα1,2 x = eαx (cos(βx)±i sin(βx)), ma per ricondurci al caso di funzioni
reali osserviamo che possiamo usare le soluzioni eαx cos(βx) e eαx sin(βx), e le soluzioni sono
della forma eαx (c1 cos(βx) + c2 sin(βx));
Per ottenere poi una soluzione particolare, vi sono due strade possibili: una è indovinarla
(e in certi casi si sa di che tipo cercare), l’altra è un metodo di “variazione delle costanti”
che spesso comporta molti calcoli.
(Metodo di somiglianza) Vediamo come si può indovinare: se il termine noto è del
tipo P (x)eλx {sin, cos}(µx), con P (x) polinomio, allora se λ + iµ non è soluzione dell’equazione caratteristica si cercano soluzioni del tipo eλx (P1 (x) sin(µx) + P2 (x) cos(µx)) dove
P1 (x) e P2 (x) sono polinomi da determinare, dello stesso grado di P (x). Se invece λ + iµ
è soluzione dell’equazione caratteristica con molteplicità m si cercano soluzioni del tipo
xm eλx (P1 (x) sin(µx) + P2 (x) cos(µx)) dove P1 (x) e P2 (x) sono come sopra.
(Metodo di variazione delle costanti) Si può usare ogniqualvolta si conoscano due
soluzioni indipendenti f1 , f2 della equazione omogenea (anche se non fosse a coefficienti
costanti) e consiste nel cercare soluzioni particolari del tipo
g(x) = c1 (x)f1 (x) + c2 (x)f2 (x)
(sono incognite le funzioni c1 (x) e c2 (x)). Imponendo che soddisfi alla equazione completa,
si può imporre la prima condizione in modo da ottenere la seconda di questo sistema:
0
c1 (x)f1 (x) + c02 (x)f2 (x) = 0
c01 (x)f10 (x) + c02 (x)f20 (x) = c(x)
che è un sistema lineare
f1 (x) f2 (x)
f10 (x) f20 (x)
0
0
c1 (x)
=
c02 (x)
c(x)
da cui si ricavano c01 (x), c02 (x), che infine si integrano per trovare c1 (x), c2 (x). Il tutto ha
l’aria piuttosto difficile, ma meccanica.
Per esempi si veda A.2.35
2.5.3.7 (esempi di equazioni lineari a coefficienti costanti). Gli esempi più importanti
di equazioni del second’ordine vengono dalla meccanica dei sistemi oscillanti (pendoli, molle)
e dalla fisica dei circuiti elettronici.
CAPITOLO 2. CALCOLO IN UNA VARIABILE.
58
(1) oscillatori armonici liberi: un pendolo, o una molla soggetta a un peso, seguono una
equazione differenziale del tipo
mf 00 = −kf
f 00 + ω 2 f = 0
ovvero
con m, k > 0. L’integrale generale è del tipo
f (t) = c1 cos(ωt) + c2 sin(ωt) = A cos(ωt + α)
(per questo detto moto armonico libero).
(2) oscillatori armonici smorzati: per tener conto di una resistenza proporzionale alla
velocità l’equazione diventa
mf 00 = −kf − hf 0
f 00 + 2δf 0 + ω 2 f = 0
ovvero
con m, δ, k > 0. Bisogna qui distinguere a seconda delle radici caratteristiche: due casi (radici
reali) portano a smorzamento, il terzo (radici non reali) porta ad oscillazioni smorzate.
(3) oscillatori armonici forzati: per mantenere il moto armonico in presenza di attrito
bisogna fornire una forza esterna, sotto forma di termine noto:
f 00 + 2δf 0 + ω 2 f = φ(t)
di solito della forma sinusoidale φ(t) = a cos(γt). Le soluzioni dell’equazione sono allora date
dalla somma di una soluzione particolare con le soluzioni del sistema omogeneo.
Nel caso δ = 0 (senza smorzamento, cioè) per trovare una soluzione particolare dobbiamo
distinguere a seconda che γ sia o meno uguale a ω: se γ 6= ω troviamo soluzioni particolari del
a
tipo ω2 −γ
2 cos(γt), che sommate al moto armonico libero danno luogo a funzioni in generale
a
non periodiche. Se invece γ = ω troviamo soluzioni del tipo 2ω
t cos(γt), che sommate al
moto armonico libero danno luogo a funzioni che oscillano con periodo ω ma con ampiezze
sempre maggiori (fenomeno di risonanza: ad un certo punto si rompe l’oggetto).
Nel caso δ > 0, la soluzione omogenea è smorzata, e sul lungo periodo prevale una
soluzione particolare, oscillatoria con il periodo esterno. Si può trovare una soluzione del
tipo b cos(γt + φ) dove ampiezza b e sfasamento φ rispetto alla sorgente dipendono da γ:
b2 =
a2
(ω 2
−
γ 2 )2
+ 4δ 2 γ 2
e
tan φ =
2δγ
γ 2 − ω2
(è interessante studiare b in funzione di γ: in certe condizioni presenta un massimo assoluto,
che è di nuovo un fenomeno di risonanza).
(5) circuiti RLC: in un circuito elettronico avente in serie un generatore, una resistenza,
una capacità e una induttanza, la tensione ai capi del condensatore varia secondo l’equazione
CLv 00 + CRv 0 + v = −V (t), e si ritrovano gli stessi fenomeni visti precedentemente.
Capitolo 3
Geometria lineare.
3.1
Spazi numerici, funzioni e sistemi lineari.
Studieremo le proprietà geometriche facili degli insiemi del tipo Rn , con particolare riguardo a
n = 2, 3 (piano e spazio reali rispettivamente). Non va sottovalutata comunque l’importanza
di questi spazi per n > 3: capita spesso che problemi reali richiedano di tener conto di più di
tre coordinate per essere descritti (ad esempio se si vuol tener conto di posizione e velocità
di una particella si dovrebbe usare un insieme del tipo R3 × R3 = R6 ).
3.1.1
Punti e vettori.
3.1.1.1 (punti). Chiamiamo l’insieme Rn lo spazio euclideo di dimensione n. I suoi elementi
si dicono i punti dello spazio, e si indicano
con lettere quali P, Q, R, S e tradizionalmente in
!
n
colonna: P ∈ R si scrive P =
p1
p2
..
.
(i numeri pi ∈ R si dicono le coordinate del punto).
pn
Lo spazio va pensato come omogeneo, e nessun punto speciale.
3.1.1.2 (vettori). La differenza (componente per componente) tra due punti si dice un
vettore, e l’insieme dei vettori (è ancora lo stesso Rn !) si chiama lo spazio vettoriale (dello
spazio euclideo dato, e della stessa dimensione n).
n
I vettori si indicano
! con lettere tipo u, v, w, sono sempre elementi di R si scrivono sempre
in colonna: v =
v1
v2
..
.
(i numeri vi ∈ R si dicono le componenti del vettore). Vanno pensati
vn
con le seguenti proprietà:
• ogni vettore v è differenza di due punti (non unicamente!) v = Q − P , e permette dato
un punto P di identificare un altro punto Q = P + v; in sostanza i vettori permettono di
spostarsi tra i punti;
• l’insieme dei vettori è dotato di alcune operazioni algebriche che ora esplicitiamo. Osserviamo prima di tutto che il vettore avente tutte coordinate nulle si indica con 0 e si dice
il vettore nullo (non sposta nessun punto).
v1 .
3.1.1.3 (prodotto per gli scalari). Per ogni vettore v = .. ∈ Rn e ogni scalare α ∈ R
vn
(in geometria, si diconoscalari
i numeri, cioè i vettori in dimensione 1) definiamo il prodotto
αv1 ..
come il vettore αv =
∈ Rn (ogni componente è moltiplicata per α). Si verificano
.
αvn
subito alcune facili proprietà del tipo: 1v = v, 0v = 0, α(βv) = (αβ)v.
w1 v1 ..
..
n
3.1.1.4 (somma di vettori). Per ogni coppia di vettori v = . ∈ R e w =
∈ Rn
.
wn
vn
v1 +w1 ..
definiamo la somma come il vettore v + w =
∈ Rn (somma componente per
.
vn +wn
59
CAPITOLO 3. GEOMETRIA LINEARE.
60
componente). Si verificano subito alcune facili proprietà del tipo: v + w = w + v, v + 0 = v,
v + (−v) = 0, u + (v + w) = (u + v) + w, e che ha buone relazioni con l’operazione precedente:
(α + β)v = αv + βv, α(v + w) = αv + αw.
3.1.1.5 (base canonica). Con le operazioni appena viste siamo in grado di esprimere tutti i
vettori come “combinazione lineare” di alcuni molto semplici che formano la “base canonica”
di Rn :
!
!
!
!
!
!
v1 !
v1
0
0
1
0
0
v2
v2
0
0
0
1
0
..
.
.
.
.
.
= . + .. + · · · + .
= v1 . + v2 . + · · · + vn .
.
.
.
.
.
.
.
v
n
0
vn
0
0
0
1
Il vettore avente coordinate tutte nulle tranne che la i-esima uguale a 1 si indica con ei ;
i vettori e1 , . . . , en permettono dunque di scrivere tutti gli altri usando le operazioni di
prodotto per scalari e somma di vettori. Quando n = 2 si scrive talvolta e1 = i e e2 = j;
quando n = 3 si scrive talvolta e1 = i, e2 = j e e3 = k.
3.1.1.6 (combinazioni lineari, vettori indipendenti e generatori). Dato un insieme
di vettori v1 , . . .P
, vd diciamo combinazione lineare di questi, con coefficienti αi ∈ R, ogni
vettore del tipo i αi vi .
Un insieme di vettori v1 , . . . , vs si dice linearmente indipendente se possiede la seguente
proprietà: il vettore P
nullo si scrive come combinazione lineare di essi solo usando tutti i
coefficienti nulli, cioè i αi vi = 0 implica αi = 0 per ogni i. Per esempio la base canonica è
linearmente indipendente.
Un insieme di vettori di dice generatore se ogni vettore si scrive come combinazione
lineare di vettori di quell’insieme.
Un insieme generatore e linearmente indipendente si dice una base. Ogni base di Rn
possiede esattamente n vettori. Questo è un risultato fondamentale e non difficile, verrà
generalizzato parlando di sottospazi.
3.1.1.7 (prodotto scalare). Una delle operazioni più importanti è il prodotto
v1 scalare
..
tra vettori (il risultato è uno scalare, cioè un numero). Dati i soliti v =
∈ Rn e
.
v
n
w1 ..
w=
∈ Rn definiamo
.
wn
v·w =
X
vi wi = v1 w1 + v2 w2 + · · · + vn wn
i
(la somma dei prodotti delle coordinate omonime).
Si osservi che questo prodotto è commutativo (v · w = w · v), associativo con gli scalari
((αv) · w = α(v · w) = v · (αw)), distributivo per la somma ((u + v) · w n= u · w + v · w), ma può
annullarsi senza che i fattori siano nulli: per esempio ei · ej = δij =
1 se i=j
0 se i6=j
(δij si chiama
simbolo di Kroneker).
L’annullamento del prodotto scalare darà una importante proprietà geometrica: l’ortogonalità dei due vettori.
3.1.1.8 (norma). La principale proprietà del prodotto scalare è di essere definito positivo
quando applicato a un vettore contro sè stesso, cioè che v · v > 0 per ogni vettore v (si tratta
di una somma di quadrati!), ed è nullo solo sul vettore nullo. Da questo segue che possiamo
definire la norma o lunghezza dei vettori tramite:
q
√
kvk = v · v = v12 + v22 + · · · + vn2
La norma tra due vettori permette di definire la distanza tra due punti P e Q come la norma
del vettore differenza:
p
d(P, Q) = kQ − P k = (q1 − p1 )2 + (q2 − p2 )2 + · · · + (qn − pn )2
(dovrebbe ricordare il teorema di Pitagora) e fare dello spazio euclideo uno spazio metrico.
CAPITOLO 3. GEOMETRIA LINEARE.
61
3.1.1.9 (disuguaglianza fondamentale). Dalla positività segue subito l’altra proprietà
fondamentale:
(v · w)2 6 (v · v)(w · w)
ovvero
|v · w| 6 kvk kwk
(detta disuguaglianza di Cauchy-Schwarz) e vale l’uguale se e solo se un vettore è multiplo
scalare dell’altro.
Essa si verifica sviluppando che (v + αw) · (v + αw) > 0 per ogni α ∈ R, da cui segue che
(w · w)α2 + 2(v · w)α + (v · v) > 0
per ogni α ∈ R
e basta imporre quindi che il discriminante (in quanto polinomio di secondo grado in α) sia
minore o uguale a zero. Si osservi invece che una dimostrazione diretta confrontando i due
membri non è banale.
Dalla disuguaglianza fondamentale segue facilmente la disuguaglianza triangolare:
kv + wk 6 kvk + kwk
(essendo positivi, basta elevare al quadrato).
3.1.1.10 ((coseni di) angoli). Possiamo allora usare la disuguaglianza per definire il coseno
dell’angolo ϑ(v, w) tra i due vettori:
cos ϑ(v, w) =
v·w
kvk kwk
(essendo un numero in valore assoluto minore o uguale a 1). In particolare quindi due vettori
sono ortogonali se e solo se il loro prodotto scalare è nullo. Si scrive spesso v ⊥ w per dire
v · w = 0.
Si osservi che dalla stessa operazione (prodotto scalare) abbiamo estratto sia la definizione
di lunghezza di vettori (che concorda con la nostra esperienza del teorema di Pitagora), sia
la nozione di coseno degli angoli: questo dovrebbe far capire perché la trigonometria usuale
è scritta in termini di lunghezze di lati di triangoli, ovvero il legame profondo tra metrica e
trigonometria.
Perché la definizione concorda con quella ingenua della trigonometria? Si tratta essenzialmente dei teoremi di Pitagora e di Carnot: in generale abbiamo
kv − wk2 = (v − w) · (v − w) = kvk2 − 2(v · w) + kwk2
(pensando v − w come terzo lato di un triangolo con lati v e w: basta confrontare allora con
kv − wk2 = kvk2 − 2kvkkwk cos ϑ(v, w) + kwk2
che è il teorema di Carnot) e quindi il triangolo è rettangolo se e solo se v · w = 0 (solo
allora “quadrato dell’ipotenusa = somma quadrati dei cateti”), e in generale dev’essere
v · w = kvk kwk cos ϑ.
3.1.1.11 (proiezioni ortogonali). Con l’operazione di prodotto scalare è facile calcolare
la proiezione di un vettore v nella direzione di un altro vettore w: di tratta di scrivere
v = αw + v 0 dove v 0 è ortogonale a w, da cui v · w = (αw + v 0 ) · w = αw · w e si ricava
v·w
v·w
, e la proiezione ortogonale è
w.
α=
w·w
w·w
v = αw + v 0
w
v0
ϑ
αw = kvk cos(ϑ)w =
v·w
w·w w
(alcuni esercizi sulla proiezione ortogonale si possono trovare in A.3.9).
CAPITOLO 3. GEOMETRIA LINEARE.
62
3.1.1.12 (sottospazi vettoriali). Vi sono alcuni sottinsiemi speciali degli spazi Rn che
useremo spesso: sono i sottinsiemi che hanno buone proprietà rispetto alle operazioni introdotte.
I più semplici sono i sottospazi vettoriali: sono sottinsiemi V caratterizzati dalla proprietà
di contenere il vettore nullo, e di essere chiusi per le operazioni di prodotto per gli scalari e
somma di vettori. Si possono descrivere essenzialmente in tre modi:
(1) descrizione con generatori: dando un insieme di vettori tali che V sia formato da
tutte e sole le loro combinazioni lineari:
V = hv1 , v2 . . . , vd i =
d
nX
αi vi : αi ∈ R
o
i=1
(2)
!rappresentazione parametrica: descrivendo V come l’insieme dei vettori di coordinate
X1
X2
..
.
che si ottengono a partire da vij ∈ R tramite
Xn
X1 = α1 v11 + α2 v21 + · · · + αd vd1
X = α v + α v + · · · + α v
2
1 12
2 22
d d2
..
.
Xn = α1 v1n + α2 v2n + · · · + αd vdn
usando tutti i possibili parametri αi ∈ R (queste espressioni si dicono le equazioni parametriche di V );
X1 !
(3) rappresentazione cartesiana: descrivendo V come l’insieme dei vettori
X2
..
.
che
Xn
soddisfano ad un sistema lineare di equazioni
β11 X1 + β12 X2 + · · · + β1n Xn = 0
β X + β X + · · · + β X = 0
21 1
22 2
2n n
..
.
βr1 X1 + βr2 X2 + · · · + βrn Xn = 0
omogeneo (senza termini noti) con fissati coefficienti βij ∈ R.
Mentre il passaggio da generatori ad equazioni parametriche è evidente, il passaggio da
equazioni cartesiane ad equazioni parametriche e viceversa non è ovvio, e si ottiene studiando
i sistemi lineari di equazioni. Le relazioni tra d (numero di generatori, o numero di parametri) e r (numero di eqazioni cartesiane) si può dire solo in certe condizini di “minimalità”
(indipendenza dei vettori e indipendenza delle equazioni) e allora sarà d + r = n.
Quando i vettori sono linearmente indipendenti, si dice che d è la dimensione del sottospazio, e n − d la sua codimensione (che è il numero minimo di equazioni lineari che servono per
descriverlo). Ogni insieme di vettori linearmente indipendente e generatore per il sottospazio
possiede allora esattamente d elementi. Mostriamo questo risultato, un po’ impegnativo, a
parte: A.3.1.
3.1.1.13 (sottospazi affini). I sottospazi affini L di Rn sono invece i traslati in un punto
P di un sottospazio vettoriale V , cioè è formato da tutti i punti della forma P + v con v ∈ V :
L = P + V = {P + v : v ∈ V }
dove P si chiama punto d’appoggio (non è unico) e V si chiama sottospazio direttore o delle
direzioni di L. Si può anche dire che un sottospazio vettoriale è un sottospazio affine che
contiene 0.
Mentre due sottospazi vettoriali si intersecano sempre (tutti contengono almeno 0), due
sottospazi affini possono avere intersezione vuota, e possiamo avere varie posizioni reciproche:
incidenti, paralleli, sghembi: per esempi vedi A.3.8.
CAPITOLO 3. GEOMETRIA LINEARE.
63
Anche per i sottospazi affini possiamo avere tre rappresentazioni:
(1) descrizione con punto d’appoggio e generatori: L = P + hv1 , v2 . . . , vd i
(2) rappresentazione parametrica:
X1 = p0 + α1 v11 + α2 v21 + · · · + αd vd1
X = p + α v + α v + · · · + α v
2
1
1 12
2 22
d d2
..
.
Xn = pn + α1 v1n + α2 v2n + · · · + αd vdn
(3) rappresentazione cartesiana: tramite un sistema di equazioni lineari non omogeneo
(avente eventualmente termini noti non nulli).
Qualche esercizio sui sottospazi si trova in A.3.9
3.1.1.14 (calcolo baricentrico). In realtà anche tra i punti possiamo introdurre una operazione di composizione, ma solo sotto certe condizioni: se abbiamo r punti P1 , . . . , Pr ed
altrettanti
scalari α1 , . . . , αr la cui somma sia 1, allora è unicamente definito un punto
P
P = i αi Pi che si dice il baricentro dei punti Pi con pesi αi dalla seguente condizione: per
qualsiasi punto O, risulta
X
αi (Pi − O)
P =O+
i
(la somma qui è una combinazione lineare di vettori, e il punto P non cambia se invece di
O si usa un qualsiasi altro punto O0 ).
Il baricentro di r punti con pesi uguali (ciascuno 1/r, quindi), si dice il baricentro di quei
punti. Per due punti si dice punto medio, per tre punti baricentro del triangolo.
3.1.2
Funzioni lineari e Matrici.
3.1.2.1 (funzioni lineari ed affini). Le più semplici funzioni φ : Rn → Rm tra spazi
vettoriali sono quelle che rispettano le operazioni di prodotto per gli scalari e di somma di
vettori, e si chiamano funzioni lineari; se poi n = m e rispettano anche il prodotto scalare si
chiamano isometrie o trasformazioni ortogonali (perché allora rispettano distanze ed angoli).
Dunque una funzione lineare deve avere la proprietà che
X
X
φ(
αi vi ) =
αi φ(vi )
i
i
ed è completamente determinata dalla scelta delle immagini dei vettori ei (base canonica
del dominio), che possono essere vettori qualsiasi del codominio (oppure vettori
unitari e
a1i !
a2i
..
ortogonali due a due nel caso di isometrie). Se scriviamo i vettori φ(ei ) =
affiancati
.
ami
otteniamo un rettangolo (matrice) m × n di numeri
A = φ(e1 ) φ(e2 ) · · ·
a11
a21
φ(en ) = .
..
a12
a21
..
.
···
···
..
.
a1n
a2n
..
.
am2 · · · amn
!
x1
x2
..
∈ Rn la sua immagine φ(v) è
.
am1
che descrive completamente φ: date un vettore v =
xn
data da
a11
a21
φ(v) = .
..
a12
a21
..
.
···
···
..
.
am1
am2
···
P
a1n
x1
Pi a1i xi
a2n
x2 i a2i xi
.. .. =
..
. . P .
amn
xn
a
x
i mi i
CAPITOLO 3. GEOMETRIA LINEARE.
64
(prodotto scalare di ogni riga di A per il vettore v, che ci suggerisce di fare il prodotto di
matrici “riga per colonna”).
Si osservi che la matrice della composizione di funzioni lineari si può calcolare usando le
matrici delle due funzioni: se φ : Rn → Rm e ψ : Rm → Rl si ha
b11 b12 · · · b1m
b21 b21 · · · b2m
ψ(φ(v)) = .
..
.. φ(v)
.
.
.
.
.
.
.
bl1 bl2 · · · blm
b11 b12 · · · b1m
a11 a12 · · · a1n
c11 c12 · · · c1n
b21 b21 · · · b2m a21 a21 · · · a2n
c21 c21 · · · c2n
= .
v= .
.
.
.
..
.
.
.. v
.
.
..
..
..
..
.. ..
..
..
..
..
.
.
.
bl1 bl2 · · · blm
am1 am2 · · · amn
cl1 cl2 · · · cln
P
dove cij = ` bi` a`j (prodotto della i-esima riga di B con la j-esima colonna di A, si può
fare solo se il numero di colonne di B è uguale al numero di righe di A).
Si osservi che le funzioni lineari mandano sempre 0 in 0 (rispettano l’algebra dei vettori);
tra spazi affini non vi sono invece punti speciali da preservare, quindi le funzioni affini sono
definite usando una traslazione qualsiasi (che indica dove va 0) e poi una applicazione lineare
sullo spazio vettoriale.
3.1.2.2 (matrici e operazioni). Siccome le funzioni lineari si rappresentano con matrici
(e viceversa, ogni matrice dà una funzione lineare), conviene studiare direttamente l’insieme
delle matrici: per ogni m, n ∈ N l’insieme delle matrici rettangolari m × n si indica con
Mm,n , ed è dotato delle operazioni di somma (componente per componente) e prodotto per
gli scalari (su ogni componente) come i vettori (che in effetti sono matrici n × 1) con le stesse
proprietà.
Inoltre, date due matrici A ∈ Mm,n e B ∈ Ml,m abbiamo definito per composizione (di
funzioni lineari) un prodotto BA ∈ Ml,n che gode delle seguenti proprietà: è associativo
(A(BC) = (AB)C ogni volta che ha senso); per ogni n esistono matrici quadrate 1n = (δij )
(1 in diagonale, 0 altrove) tali che A1n = A e 1n B = B ogni volta che il prodotto ha senso;
è compatibile con le operazioni precedenti: A(B + C) = AB + AC, (A + B)C = AC + BC,
α(AB) = (αA)B = A(αB), ecc.
Siccome il prodotto di matrici corrisponde alla composizione di funzioni, esso non è
commutativo in generale: per esempio se A = ( 00 10 ), B = ( 01 00 ), C = ( 10 00 ) allora C = AB 6=
BA = ( 00 01 ) e 02 = AC 6= CA = A.
Si noti ancora che il prodotto di matrici è piuttosto sofisticato: il prodotto può essere
nullo senza che nessuna matrice lo sia, esistono matrici non nulle con una potenza nulla
2
(quindi ci sono molte radici di zero: per esempio ( 00 x0 ) = 02 per ogni x), esistono matrici
con quadrato identico diverse da ±1n (per esempio ( 01 10 ), quindi più di due radici quadrate
dell’identità), esistono matrici non nulle e non identiche con una potenza uguale a sè stessa...
Per qualche esercizio sulle matrici si veda A.3.4.
3.1.2.3 (nucleo e immagine, iniettività e suriettività). Data una funzione lineare
φ : Rn → Rm , si chiama nucleo di φ l’insieme dei vettori del dominio che sono mandati in
0. Si controlla subito che è un sottospazio vettoriale, e che φ è iniettiva se e solo se il suo
nucleo è 0.
Anche l’immagine di φ è un sottospazio (del codominio: generato dalle colonne della
matrice, che sono le immagini dei vettori della base canonica), e naturalmente l’immagine
coincide con il codominio se e solo se la funzione è suriettiva; per questo basta quindi che un
qualunque insieme di generatori del codominio appartenga all’immagine.
Vi è una stretta relazione tra nucleo e immagine: la somma delle dimensioni dà la dimensione del dominio: infatti se prendiamo una base del nucleo, e completiamo a una base
del dominio usando vettori della base canonica, questi ultimi hanno per immagine una base
CAPITOLO 3. GEOMETRIA LINEARE.
65
dell’immagine (cioè sono indipendenti e generatori dell’immagine). Un altro modo di dire la
stessa cosa si ha nel teorema di Rouché-Capelli per i sistemi lineari.
Da questo segue che una funzione lineare di Rn in sè è iniettiva se e solo se è suriettiva,
dunque se e solo se è biiettiva. Di conseguenza le matrici quadrate sono invertibili se e solo
se hanno nucleo nullo, se e solo se le colonne sono indipendenti, se e solo se sono invertibili
a destra (o a sinistra).
3.1.2.4 (matrici scalari, diagonali e triangolari). Si chiamano matrici scalari quelle del
tipo α1n , diagonali le matrici quadrate tali che aij = 0 se i 6= j (cioè hanno entrate nulle
fuori delle diagonale), e triangolari superiori (risp. inferiori) quelle con aij = 0 se i > j (risp.
i < j), cioè hanno entrate nulle sotto (risp. sopra) la diagonale.
3.1.2.5 (trasposizione, matrici quadrate simmetriche e antisimmetriche). Per ogni
matrice A si chiama trasposta di A e si indica con At la matrice che in posizione i, j ha il
termine aj,i (si noti lo scambio degli indici): quindi ha come righe le colonne di A e viceversa;
ovviamente se A è matrice n×m, allora At è matrice m×n. Si verifica subito che per matrici
diagonali D si ha D = Dt , e in generale (A + B)t = At + B t , (AB)t = B t At ogni volta che
le operazioni hanno senso.
Nel caso di matrici quadrate, una matrice si dice simmetrica se coincide con la propria
trasposta (A = At , che significa aij = aji ), e antisimmetrica se coincide con l’opposto della
propria trasposta (A = −At , che significa aij = −aji , in particolare è nulla sulla diagonale).
3.1.2.6 (matrici ortogonali). Nella geometria euclidea sono particolarmente importanti
le funzioni lineari che mandano la base canonica in una base ortonormale (formata di vettori
di norma 1 e due a due ortogonali): queste si dicono funzioni (e matrici) ortogonali. La loro
proprietà fondamentale è di rispettare il prodotto scalare nel senso che per ogni coppia di
vettori si ha
φ(v · w) = φ(v) · φ(w)
(in particolare sono biiettive).
Per esempio le matrici ortogonali di ordine 2 sono tutte del tipo
cos θ ∓ sin θ
sin θ ± sin θ
(già in dimensione 3 è più difficile descriverle, vedi per esempio le matrici di simmetrie
ortogonali). In generale una matrice A è ortogonale se e solo se At A = 1n (ha come inversa
la propria trasposta).
3.1.2.7 (matrici di proiezioni e simmetrie ortogonali). Un esempio abbastanza semplice viene dalle proiezioni ortogonali p in direzione di un vettore v, e dalle simmetrie ortogonali
rispetto allo stesso vettore s = id − 2p. Per trovare la matrice della proiezione ortogonale p
nella direzione di v basta ricordare che
p(x) = v
v vt
v·x
= t x
v·v
vv
dove v t significa il vettore v scritto in riga (trasposto), e il prodotto vv t dà quindi una matrice
quadrata, che è quella cercata.
v vt
Di conseguenza abbiamo che la matrice di s è 1n − 2 t (che si vede facilmente essere
vv
una matrice simmetrica e di quadrato identico, quindi ortogonale).
3.1.2.8 (matrici quadrate e determinanti). Nel caso particolare delle matrici quadrate
n × n (che danno funzioni lineari di Rn in sè) abbiamo dunque un insieme dotato di somma e
prodotto (non commutativo). In generale non è vero che una matrice non nulla sia invertibile
(ovvero che la funzione lineare corrispondente sia biiezione), e questo problema è legato a
quello della indipendenza dei vettori colonna che formano la matrice.
CAPITOLO 3. GEOMETRIA LINEARE.
66
Il metodo principale per capire se una matrice è invertibile è calcolarne il determinante.
Esso può essere definito in vari modi, il più immediato dei quali è per induzione su n tramite
i cosiddetti sviluppi di Laplace:
(1) per n = 1 il determinante è il numero stesso: det(a) = a;
(2) per n + 1 definiamo il determinate di una matrice A ∈ Mm+1 (R) usando lo sviluppo
secondo la prima colonna:
n+1
X
det(A) =
(−1)i+j aij Aij
i=1
dove j = 1 e Aij ∈ Mn (R) è la matrice che si ottiene da A eliminando riga e colonna
dell’elemento aij .
In particolare dunque: per n = 2 abbiamo
a b
det
= ad − bc
c d
(“diagonale principale meno antidiagonale”) e per n = 3 risulta
a11 a12 a13
det a21 a22 a23 = a11 a22 a33 + a12 a23 a31 + a13 a21 a32
a31 a32 a33
− a13 a22 a31 − a12 a21 a33 − a11 a22 a32
(“diagonali meno antidiagonali”), ma si faccia attenzione, che in generale si tratta di n!
addendi, per n > 4 molto più che le diagonali...
Dalla definizione possiamo già capire che il determinante di matrici diagonali o anche
triangolari è semplicemente il prodotto degli elementi in diagonale.
Vi sono alcune proprietà importanti dei determinanti, alcune facili ma che permettono
un calcolo molto più facile della definizione. Prima di tutto si possono calcolare sviluppando
rispetto ad una qualunque colonna, e anche rispetto ad una qualunque riga (cioè il risultato
è sempre lo stesso). Inoltre:
(a1 ) se una riga, o una colonna, sono moltiplicate per α ∈ R, allora il determinante è
moltiplicato per α;
(a2 ) se una colonna (risp. riga) è somma di due, allora il determinante è somma dei due
determinanti delle matrici con quelle colonne (risp. righe), e le altre invariate;
(a3 ) scambiando di posto due colonne, o due righe, il determinante cambia segno;
(a4 ) se due colonne o due righe sono uguali, e quindi se una colonna o una riga sono
nulle, allora il determinante si annulla.
Queste regole suggeriscono di “semplificare la matrice” di cui calcolare il determinante
semplicemente sommando a una colonna un multiplo di un’altra (il determinante non cambia,
e possiamo semplificare la prima colonna).
Conviene anche osservare che si tratta delle stesse regole che dovrebbero essere richieste a
qualsiasi funzione che misuri il volume (la “quantità di spazio” n-dimensionale) di un parallelepipedo avente quei vettori come lati; imponendo anche che il valore sulla base canonica
sia 1 (l’ipercubo unitario ha volume unitario) la funzione è anche unica...
Mentre il determinante non ha buone proprietà con la somma di matrici (provare qualche
esempio, vedi A.3.5), si comporta bene con il prodotto:
(b1 ) det(1n ) = 1
(b2 ) det(AB) = det(A) det(B) (non è facile da verificare direttamente!).
3.1.2.9 (determinanti e invertibilità). Una matrice quadrata A ∈ Mn (R) è invertibile,
cioè esiste B ∈ Mn (R) tale che AB = 1n = BA, se e solo se det(A) 6= 0, e in tal caso la
matrice inversa A−1 si scrive
!
1
i+j
−1
(−) det(Aji )
A =
det(A)
i,j
CAPITOLO 3. GEOMETRIA LINEARE.
67
e più in generale vale che AB = det(A)1n se B è la matrice a destra della formula precedente. È da notare peraltro che questa formula di inversione è molto lunga in pratica, e si
preferiranno altri metodi (tipo la riduzione di Gauss). Nel caso n = 2 abbiamo
−1
1
d −b
a b
=
c d
ad − bc −c a
ed è l’unico facile, per altri casi vedi A.3.5
3.1.2.10 (determinanti e indipendenza lineare). Un insieme di n vettori di Rn è linearmente indipendente se e solo se il determinante della matrice di cui quei vettori sono le
colonne è diverso da zero.
3.1.2.11 (determinanti e orientamento dello spazio). Se un determinante non è nullo
allora esso è positivo o negativo. Questo permette di dividere in due l’insieme della matrici
invertibili, e di conseguenza l’insieme delle basi di Rn : la scelta di uno di questi due insiemi
si chiama orientazione. Due basi sono della stessa orientazione se si passa dall’una all’altra
tramite una matrice di determinante positivo.
3.1.3
Soluzione di sistemi lineari.
3.1.3.1 (definizioni). Un sistema di equazioni lineari è
a11 X1 + a12 X2 + · · · + a1n Xn = b1
a11
a21
a21 X1 + a22 X2 + · · · + a2n Xn = b2
ovvero .
..
..
.
am1 X1 + am2 X2 + · · · + amn Xn = bm
am1
una scrittura del tipo
a12 · · · a1n
X1
b1
X2 b2
a21 · · · a2n
..
.. .. = ..
..
.
.
. . .
am2
···
amn
Xn
bm
dove i coefficienti aij ∈ R si dicono i coefficienti del sistema, e formano la matrice incompleta
del sistema, le variabili Xi sono le incognite del sistema, e i coefficienti bi ∈ R si dicono i
termini noti del sistema. La matrice
a11 a12 · · · a1n b1
a21 a21 · · · a2n b2
..
..
..
..
..
.
.
.
.
.
am1
am2
···
amn
bm
che affianca la matrice incompleta ai termini noti si dice matrice completa del sistema, e
descrive completamente il sistema.
Il sistema si dice omogeneo se i termini noti sono tutti nulli, non omogeneo altrimenti.
Si dicono soluzioni del sistema lineare tutti gli elementi di Rn che sostituiti al posto delle
incognite soddisfano l’uguaglianza (si tratta di calcolare le antimmagini tramite la funzione
di matrice incompleta del punto di coordinate date dai termini noti). Risolvere il sistema
significa trovare tutte le soluzioni.
3.1.3.2 (teorema di Rouché-Capelli). Il teorema fondamentale per i sistemi lineari è
quello che descrive la struttura dell’insieme delle soluzioni, ed afferma che:
(1) se il sistema è omogeneo, l’insieme delle soluzioni è un sottospazio vettoriale del
dominio (si tratta del nucleo della matrice), di dimensione pari alla differenza tra il numero
di variabili e il rango della matrice (numero di equazioni indipendenti);
(2) se il sistema non è omogeneo, esso ammette soluzione se e solo se il vettore dei
termini noti appartiene allo spazio generato dalle colonne della matrice, e in tal caso l’insieme
delle soluzioni è un sottospazio affine del dominio che si ottiene sommando una qualunque
soluzione del sistema completo allo spazio delle soluzioni del sistema reso omogeneo. Il
sistema ha o meno soluzioni a seconda che il rango della matrice completa sia uguale o
maggiore di quello della matrice incompleta.
Questi due risultati si possono dimostrare direttamente in modo facile. Per trovare operativamente le soluzioni del sistema lineare, vi sono due strategie standard: una per sistemi
qualsiasi (riduzione di Gauss), l’altra per sistemi quadrati invertibili (metodo di Cramer).
CAPITOLO 3. GEOMETRIA LINEARE.
68
3.1.3.3 (metodo di riduzione di Gauss). Un metodo elementare di soluzione dei sistemi
(sommare tra loro le equazioni per renderle più semplici) si può applicare direttamente alla
matrice del sistema tramite le operazioni elementari seguenti:
(1) spostare di posto due righe;
(2) moltiplicare una riga per una costante non nulla;
(3) sommare ad una riga un multiplo di un’altra riga;
Si tratta evidentemente di operazioni che non cambiano l’insieme delle soluzioni del sistema
(il lettore attento può verificare che si tratta di moltiplicare a sinistra la matrice del sistema
per opportune matrici quadrate invertibili molto semplici, dette matrici elementari). Tramite
tali operazioni possiamo ridurre il sistema in forma detta a scalini:
1 ∗ ···∗
∗
∗
∗
∗
0···0 1 ∗ ···∗
∗
∗
∗
0
0···0 1 ∗ ···∗
∗
∗
0
0
0 · · · 0 1 ∗ · · · ∗ ∗
0
0
0
0···0 ∗
precedendo nel seguente modo:
(a) si sposta al primo posto una riga che abbia primo termine non nullo e si la moltiplica
in modo che tale termine sia 1;
(b) usando la prima riga si cancellano tutti i primi termini delle successive (basta sommare
ad esse un opportuno multiplo della prima riga);
(c) si procede allo stesso modo con le righe successive.
Dalla forma a scalini si vede subito il rango della matrice incompleta (uguale al numero di
righe non nulle), di quella completa, e si possono facilmente scrivere tutte le soluzioni del
sistema: basta ricavare le incognite che iniziano una riga con un coefficiente non nullo e
considerare le altre come parametri liberi.
3.1.3.4 (metodo di Cramer). Il metodo di Cramer si usa nel caso di matrici quadrate
invertibili: in tal caso esiste una unica soluzione che si trova da AX = b invertendo la matrice
X = A−1 b, che dà luogo alle seguenti espressioni:
Xi =
det(Ai )
det(A)
ove Ai è la matrice che si ottiene dalla matrice A sostituendo la i-esima colonna con la
colonna b dei termini noti.
3.1.3.5 (problema inverso). Qualche volta, per esempio per passare dalle equazioni parametriche a quelle cartesiane di un sottospazio affine, bisogna saper costruire un sistema
lineare che abbia un prefissato insieme di soluzioni. Un modo semplice, ma lungo, per fare
questo è di eliminare uno per uno i parametri che compaiono (ricavando un parametro da
un’equazione e sostituendo nelle altre, si ottiene un sistema con un parametro in meno, e
una equazione in meno).
È più utile spesso, se l’insieme è scritto nella forma P + hv1 , . . . , vs i imporre alla matrice
di colonne X − P, v1 , . . . , vs di essere di rango uguale al rango della matrice di colonne
v1 , . . . , vs (se i vettori sono indipendenti, il rango è s, e basta annullare i determinanti delle
sottomatrici quadrate di ordine s + 1 della matrice).
Alcuni esercizi sui sistemi lineari si possono trovare in A.3.6.
CAPITOLO 3. GEOMETRIA LINEARE.
3.2
69
Piano.
La scelta delle coordinate X, Y in R2 è del tutto arbitraria: sono le coordinate legate al punto
0
2
0 come origine, e alla base canonica di R . Possiamo usare come coordinate cartesiane in
2
0
0
R qualunque coppia X , Y legate a X, Y tramite
0 0
X
a0
a1 a2
X
X = a0 + a1 X + a2 Y
=
+
ovvero
Y0
b0
b1 b2
Y
Y 0 = b0 + b1 X + b2 Y
con a1 b2 − a2 b1 6= 0.
Diremo che le coordinate sono ortogonali se la matrice di passaggio è ortogonale, cioè se
i vettori colonna sono una base ortonormale di R2 (solo in questo caso il prodotto scalare, e
quindi il calcolo di lunghezze e angoli, si fa con le stesse formule delle coordinate usuali).
Se la matrice di passaggio ha determinante negativo, le nuove coordinate hanno cambiato
orientamento del piano.
3.2.1
Rette.
3.2.1.1 (rette). Le rette in R2 si descrivono tramite:
• un punto e un vettore direzione non nullo P + hui;
• due punti distinti P + hQ − P i;
• una equazione cartesiana, i cui coefficienti rappresentano un vettore v ortogonale alla
retta: v · ( X
Y )=c .
Per trovare equazioni cartesiane dati P e u (= Q−P , ev.), basta scrivere det(( X
Y )−P, u) = 0.
Per trovare la direzione della retta dalle equazioni cartesiane, basta
calcolare
un vettore
ortogonale ai coefficienti: se v = ab allora possiamo usare u = −b
.
a
3.2.1.2 (posizioni relative). Due rette si dicono parallele se hanno la stessa direzione
(vettori direttori proporzionali), incidenti se hanno un punto in comune. Dalle equazioni
cartesiane si riconosce il parallelismo dal fatto che la matrice incompleta delle due retta ha
rango 1. Vedi A.3.7 per caratterizzazioni matriciali di posizioni ed equazioni.
3.2.1.3 (fasci di rette). Dato un punto P , l’insieme delle rette passanti per P si dice il
fascio di centro P ; date due rette distinte per P , siano di equazioni cartesiane aX +bY +c = 0
e a0 X + b0 Y + c0 = 0 allora tutte le rette del fascio si scrivono come combinazione
α(aX + bY + c) + β(a0 X + b0 Y + c0 ) = 0
per α, β ∈ R non entrambi nulli.
Data una retta del piano, l’insieme di tutte le rette parallele a questa si dice fascio
improprio di direzione quella della retta data; se aX + bY + c = 0 è l’equazione della retta,
allora aX + bY + γ = 0 con γ ∈ R descrive tutte le rette del fascio improprio.
Viceversa, data una espressione del tipo
α(aX + bY + c) + β(a0 X + b0 Y + c0 ) = 0
con α, β variabili in R e le due espressioni tra parentesi non proporzionali (cioè rappresentino
rette diverse) descrive un fascio di rette che è improprio o proprio a seconda che le due rette
tra parentesi siano parallele o meno.
3.2.1.4 (angolo tra rette). L’angolo tra due rette si definisce solo se sono incidenti, e in
tal caso è (tra 0 e π/2) il minore degli angoli formati dai vettori direttori: se r = P + hui e
s = Q + hvi abbiamo
|u · v|
cos ϑ(r, s) = | cos ϑ(u, v)| =
kukkvk
(il modulo serve per selezionare l’angolo acuto tra le due direzioni).
CAPITOLO 3. GEOMETRIA LINEARE.
70
Le bisettrici di due rette incidenti si ottengono come le rette per il punto di incidenza e
direzioni v ± w se kvk = kwk, o come somma/differenza delle equazioni normalizzate (cioè
con a2 + b2 = a02 + b02 ).
Come si ottengono le rette perpendicolari a una data, o che formano un fissato angolo
con una data?
3.2.2
Distanze.
3.2.2.1 (distanza tra punti). Dati due punti P = ( pp12 ) e Q = ( qq12 ) la loro distanza è la
norma del vettore differenza
p
d(P, Q) = kQ − P k = (q1 − p1 )2 + (q2 − p2 )2 .
Il punto medio tra due dati è 21 P + 21 Q ed è un punto equidistante dai due. Il luogo dei
punti equidistanti da due punti dati?
Il baricentro di tre punti dati (triangolo) è 13 P + 13 Q + 13 R.
3.2.2.2 (distanza tra punti e rette). La distanza tra un punto P e una retta r è la
minima distanza di P dai punti di r; si dice punto di minima distanza il punto di r che la
realizza. Se P = ( pp12 ), r è dato da Q + hui, di equazione aX + bY = c, la distanza è data da
d(P, r) =
| det(Q − P, u)|
|ap1 + bp2 − c|
√
=
2
2
kuk
a +b
(l’ultima formula dà il rapporto tra l’area di un parallelogramma e la sua base, ovvero
l’altezza; la prima dà la proiezione ortogonale di Q − P su un vettore ortogonale alla retta)
| det(P −Q, u)|
a
b
P
r
P −Q
d(P, r)
u
P
0
Q
e il punto di minima distanza P 0 si ottiene imponendo che il vettore congiungente con P sia
ortogonale alla retta (cioè si impone (Q + αu − P ) ⊥ u e si ricava α: una equazione lineare
ed una incognita).
3.2.2.3 (distanza tra rette). La distanza tra due rette è non nulla solo se sono parallele,
e in tal caso è la distanza di un punto qualsiasi di una dall’altra.
3.2.3
Aree.
3.2.3.1 (aree di parallelogrammi e triangoli). Dati tre punti P, Q, R non allineati, il
parallelogramma da essi determinato è l’insieme dei punti P + α(Q − P ) + β(R − P ) con
α, β ∈ [0, 1], mentre il triangolo avente quei vertici è il sottinsieme per cui α, β, α + β ∈ [0, 1].
L’area di un parallelogramma determinato da tre vertici P, Q, R o da due vettori v =
Q − P , w = R − P è data da | det(u v)| (ricordare la discussione sui determinanti). L’area
del triangolo con quei vertici è la metà di quella del parallelogramma.
3.2.4
Coniche.
Le coniche sono i sottinsiemi del piano descritti da equazioni di secondo grado. Possono
essere il prodotto di due rette, o il quadrato di una retta, ma allora si riconoscono perché
sono riducibili come polinomi. Altrimenti abbiamo:
CAPITOLO 3. GEOMETRIA LINEARE.
71
2
2
Y
3.2.4.1 (ellissi e cerchi). hanno equazioni in opportune coordinate del tipo X
a2 + b2 =
±1 (con −1 non hanno punti reali; a, b sono i semiassi; si dicono cerchi se a = b), e
geometricamente si costruiscono come luogo dei punti la cui somma
delle distanze da due
fissati (fuochi) è costante. Se i fuochi sono posizionati in ±f
e
la
costante
è 2a si trova
0
√
2
2
2
2
2
b = a − f , e f = ± a − b . Si ricordino anche le equazioni parametriche usando l’angolo
θ
θ (doppio dell’area del settore circolare), i punti dell’ellisse sono ab cos
sin θ , e le equazioni
1−t2
θ
1
parametriche in termini di t = tan 2 nel caso della circonferenza unitaria: 1+t
2
2t .
2
2
Y
3.2.4.2 (iperboli). hanno equazioni in opportune coordinate del tipo X
a2 − b2 = 1 (a, b
sono i semiassi; si dicono equilatere se a = b), e geometricamente si costruiscono come luogo
dei punti la cui differenza
delle distanze da due fissati (fuochi) è costante.
Se i fuochi sono
√
2
2
2
2 + b2 . Si ricordino
a
posizionati in ±f
e
la
costante
è
2a
si
trova
b
=
f
−
a
,
e
f
=
±
0
anche le equazioni parametriche usando il radiante
iperbolico θ (doppio dell’area del settore
θ
iperbolico), i punti dell’iperbole sono ab cosh
,
e
le
equazioni parametriche in termini di
sinh θ
1+t2
θ
1
t = tanh 2 nel caso della iperbole equilatera unitaria: 1−t
2
2t .
3.2.4.3 (parabole). hanno equazioni in opportune coordinate del tipo Y = pX 2 (p è il
parametro), e geometricamente si costruiscono come luogo dei punti aventi uguale distanza
da un punto fisso (fuoco) e una retta fissa (direttrice). Se il fuoco è in f0 e la direttrice
Y = −f , allora risulta 4pf = 1.Si ricordi anche la parametrizzazione in termini di X stesso:
i punti della parabola sono ptt2 al variare di t ∈ R.
3.2.4.4 (eccentricità). Ricordiamo infine che tutti i tipi di coniche possono essere visti
come luoghi di punti tali che il rapporto tra le distanze da un fissato punto (fuoco) e da
una fissata retta (direttrice) è costante (tale rapporto di chiama eccentricità ed è 1 per le
parabole, minore di 1 per le ellissi, maggiore di uno per le iperboli, zero per i cerchi). In
particolare
si ha e = f /a (rispetto alle equazioni canoniche di ellissi ed iperboli) e le direttirici
per f0 sono X = a2 /f .
F
F2
F1
F2
F1
d
3.2.4.5 (equazioni generali di secondo grado). In generale, data una equazione irriducibile di secondo grado in X, Y , possiamo cambiare le coordinate del piano in modo da ottenere
uno dei precedenti tipi di coniche, ma queste trasformazioni non sono facili in generale: vedi
A.3.10 per un metodo elementare.
Per fare le cose in modo più scientifico, si osserva che ogni equazione di secondo grado
determina unicamente una matrice simmetrica d’ordine 3 nel seguente modo:
1
a β γ
1 X Y β b α X = a + bX 2 + cY 2 + 2βX + 2γY + 2αXY ,
γ α c
Y
e le proprietà della conica sono determinate dalla matrice:
◦ è riducibile se e solo se la matrice ha determinante nullo (retta doppia se il rango è 1,
coppia di rette distinte se il rango è 2);
◦ se è irriducibile (matrice invertibile), è ellisse, iperbole, parabola a seconda che bc − α2
sia minore, maggiore, uguale a 0.
Come cambia la matrice con un cambiamento di coordinate affini?
CAPITOLO 3. GEOMETRIA LINEARE.
3.3
72
Spazio.
3
La scelta delle
coordinate X, Y, Z in R è del tutto arbitraria: sono le coordinate legate
0
al punto 0 come origine, e alla base canonica di R3 . Possiamo usare come coordinate
0
cartesiane in R3 qualunque terna X 0 , Y 0 , Z 0 legata a X, Y, Z
0
X
a0
a1 a2 a3
X
Y 0 = b0 + b1 b2 b3 Y
ovvero
Z0
bc0
c1 c2 c3
Z
tramite
X 0 = a0 + a1 X + a2 Y + a3 Z
Y 0 = b0 + b1 X + b2 Y + b3 Z
Z 0 = c0 + c1 X + c2 Y + c3 Z
con il determinante della matrice non nullo.
Diremo che le coordinate sono ortogonali se la matrice di passaggio è ortogonale, cioè se
i vettori colonna sono una base ortonormale di R3 (solo in questo caso il prodotto scalare, e
quindi il calcolo di lunghezze e angoli, si fa con le stesse formule delle coordinate usuali).
Se la matrice di passaggio ha determinante negativo, le nuove coordinate hanno cambiato
orientamento dello spazio.
3.3.1
Prodotto vettore e prodotto misto
3.3.1.1 (prodotto vettore). Nel caso di R3 è possibile definire una operazione tra vettori
che dà come risultato il vettore nullo se erano dipendenti, e un vettore ortogonale ai due dati
e di lunghezza uguale all’area
che essi descrivono se sono indipendenti.
x2 x1 del parallelogrammo
3
Dati due vettori v1 = yz1 e v2 = yz2 in R , definiamo il loro prodotto vettore tramite
2
1
un determinante:
i x1 x2
y1 z2 − y2 z1
y y2
x x2
y y2
v1 ×v2 = det j y1 y2 = i det 1
−j det 1
+k det 1
= −x1 z2 + x2 z1
z1 z2
z1 z2
z1 z2
k z1 z2
x1 y2 − x2 y1
(sviluppo sulla prima colonna).
3.3.1.2 (proprietà). Si vede subito che il prodotto vettore si annulla se e solo se i due
vettori sono uno multiplo dell’altro.
Rispetto al prodotto con gli scalari si ha che (αv) × w = α(v × w) = v × (αw).
Rispetto alla somma di vettori si ha che (v1 + v2 ) × w = v1 × w + v2 × w.
Cambiando l’ordine dei vettori si ha che v × w = −w × v.
Riguardo al prodotto scalare si ha che u · (v × w) = det(u v w), e in particolare v × w è
ortogonale sia a v sia a w.
Calcolando la norma del prodotto vettore si ottiene il seguente risultato:
kv × wk2 = kvk2 kwk2 − (v × w)2 = kvk2 kwk2 sin2 ϑ(v, w)
(formula di Lagrange) che ci dice che la norma del prodotto vettore è uguale all’area del
parallelogramma descritto dai vettori v e w.
Osservando infine che il determinante formato dai vettori v, w, v × w è positivo, possiamo
concludere che il verso di v × w è quello che rende questa terna equiorientata con la terna
canonica e1 , e2 , e3 (regola di qualche mano dei fisici).
3.3.1.3 (prodotto misto). Il prodotto misto di tre vettori u, v, w ∈ R3 è per definizione
lo scalare u · (v × w), che abbiamo già visto essere il determinante dei tre vettori, ma ora lo
possiamo interpretare geometricamente:
|u · (v × w)| = kukkv × wk cos ϑ(u, v × w)
da cui si vede che è il volume (con segno) del parallelepipedo descritto dai tre vettori (kv ×wk
è l’area di base, kuk cos ϑ(u, v × w) misura l’altezza).
CAPITOLO 3. GEOMETRIA LINEARE.
3.3.2
73
Rette e piani.
Useremo X =
X Y
Z
per indicare le variabili in R3 .
3.3.2.1 (rette). Le rette in R3 si descrivono tramite:
• un punto e un vettore direzione non nullo P + hui;
• due punti distinti P + hQ − P i;
• intersezione di due piani, ovvero due equazioni cartesianenindipendenti, i cui coefficienti
v·X=a
rappresentano vettori v, w indipendenti ortogonali alla retta: w·X=b
.
Per trovare equazioni cartesiane dati P e u (= Q − P , ev.), basta scegliere due equazioni tra
det(X − P u ei ) = 0 (dove gli ei sono i vettori della base canonica).
Per trovare la direzione della retta dalle equazioni cartesiane, basta calcolare u = v × w.
3.3.2.2 (stelle e fasci di rette). Dato un punto P dello spazio, diciamo stella di rette per
P l’insieme tutte le rette passanti per P ; data una retta, l’insieme di tutte le rette ad essa
parallele si dicono stella impropria della fissata direzione.
I fasci di rette dello spazio sono i fasci di rette in qualche piano dello spazio.
3.3.2.3 (piani). I piani in R3 si descrivono tramite:
• un punto e due vettori direzione indipendenti P + hv, wi;
• tre punti non allineati P + hQ − P, R − P i;
• una equazione cartesiana, i cui coefficienti rappresentano un vettore u ortogonale al
piano: u · X = a .
Per trovare equazioni cartesiane dati P e v, w (= Q−P, R−P , ev.), basta det(X−P v w) = 0.
Per trovare la direzione del piano dalle equazioni cartesiane, basta trovare due vettori
indipendenti ortogonali ad u, per esempio tra u × e1 , u × e2 , u × e3 .
3.3.2.4 (fasci di piani). Data una retta, l’insieme dei piani che la contengono si chiama
fascio di piani di asse quella retta; dati due piani distinti del fascio, ogni altro si scrive come
combinazione lineare dei due dati. I fasci impropri sono quelli formati dai piani paralleli a
uno fissato; si scrivono semplicemente variando il termine noto di uno qualsiasi dei piani.
3.3.2.5 (posizioni reciproche). Due rette si dicono incidenti se hanno punti comuni, parallele se hanno vettori direttori proporzionali (stessa direzione), sghembe altrimenti. Come
si riconoscono le posizioni reciproche dalle equazioni? Il sistema delle equazioni delle due
rette è formato da quattro equazioni: le rette sono parallele se e solo se la matrice incompleta
ha rango 2, se la matrice incompleta ha rango 3, esse sono incidenti o sghembe a seconda
che il rango della matrice completa sia 3 o 4.
Una retta e un piano si dicono incidenti se hanno punti comuni, paralleli se la direzione
della retta è contenuta nella direzione del piano. Usando il sistema delle tre equazioni
cartesiane, sono paralleli se e solo se il rango della matrice incompleta è 2.
Due piani si dicono incidenti se hanno punti in comune, paralleli se hanno la stessa
direzione. Usando il sistema di equazioni dei due piani: essi sono paralleli se la matrice
incompleta ha rango 1 (coincidenti se anche la completa ha rango 1, altrimenti sono disgiunti).
Vedi anche A.3.7 per caratterizzazioni matriciali di posizioni ed equazioni.
CAPITOLO 3. GEOMETRIA LINEARE.
3.3.3
74
Distanze.
3.3.3.1 (distanza tra punti). Dati due punti P =
d(P, Q) = kQ − P k =
p
p1 p2
p3
eQ=
q1 q2
q3
la loro distanza è
(q1 − p1 )2 + (q2 − p2 )2 + (q3 − p3 )2 .
Punti medi, baricentri?
3.3.3.2 (distanza tra punti e piani). La distanza tra un punto P e un piano π è la
minima distanza di P dai punti di π; si dice punto di minima distanza il punto di π che la
p1
realizza. Se P = pp2 π è dato da Q + hv, wi, di equazione aX + bY + cZ = d la distanza è
3
data da
d(P, π) =
|ap1 + bp2 + cp3 − d|
|(Q − P ) · (v × w)|
| det(Q − P, v, w)|
√
=
=
kv × wk
kv × wk
a2 + b2 + c2
(le ultime formule danno il rapporto tra il volume di un parallelepipedo e la sua area di base,
ovvero l’altezza; la prima formula dà la proiezione ortogonale del vettore Q − P su un vettore
ortogonale al piano)
| det(P −Q, v, w)|
v×w
P
P −Q
w
d(P, π)
kv×wk
P0
v
Q
π
e il punto di minima distanza P 0 si ottiene imponendo che il vettore congiungente con P sia
ortogonale al piano (cioè si impone che (Q − P + αv + βw) ⊥ v, w ricavando le due incognite
α, β dalle due equazioni).
3.3.3.3 (distanza tra punti e rette). La distanza tra un punto P e una retta r è la
minima distanza di P dai punti di r; si dice punto di minima distanza il punto di r che la
realizza. Se r = Q + hui si ha
d(P, r) =
k(Q − P ) × uk
kuk
(è il rapporto l’area di un parallelepipedo e la sua base, che dà l’altezza) e il punto di minima
distanza si ottiene imponendo che il vettore congiungente con P sia ortogonale alla retta.
3.3.3.4 (distanza tra rette). La distanza di una retta r da una retta s è la minima distanza
tra punti di r e punti di s, quindi è nulla solo se le rette sono incidenti; le coppie di punti
di minima distanza sono infinite se le rette sono parallele, uniche altrimenti. Se abbiamo
r = P + hui e s = Q + hvi e le due rette sono parallele, basta calcolare la distanza di un
punto qualsiasi di una dall’altra o calcolare
d(r, s) =
k(Q − P ) × uk
kuk
(rapporto tra area e base di un parallelogramma), altrimenti (non parallele) abbiamo
d(r, s) =
|(Q − P ) · (u × v)|
| det(Q − P, u, v)|
=
ku × vk
ku × vk
(rapporto tra volume e area di base di un parallelepipedo).
CAPITOLO 3. GEOMETRIA LINEARE.
75
r
r
u
u
k(P −Q)×uk
P
s
d(r, r0 )
P −Q
| det(P −Q, u, v)|
P
u
ku×vk
P −Q
d(r, s)
s
Q
Q
v
Per trovare i punti di minima distanza, basta imporre ad un vettore congiungente le due
rette di essere ortogonale ad entrambe (al vettore differenza tra P + αv e Q + βw di impone
ortogonalità a v e w: dalle due equazioni si ricavano le due incognite α, β, e quindi i punti).
3.3.3.5 (distanza tra rette e piani). La distanza di una retta r da un piano π è la minima
distanza tra punti di r e punti di π, quindi è non nulla solo se sono paralleli e disgiunti; in
tal caso è la distanza di un punto qualsiasi di r da π (non viceversa!).
3.3.3.6 (distanza tra piani). La distanza di un piano π da un piano σ è la minima distanza
tra punti di π e punti di σ, quindi è non nulla solo se sono paralleli e disgiunti; in tal caso è
la distanza di un punto qualsiasi di π da σ (o viceversa).
3.3.4
Angoli.
3.3.4.1 (angolo tra rette). L’angolo tra due rette si definisce solo se sono incidenti, e in
tal caso è (tra 0 e π/2) il minore degli angoli formati dai vettori direttori: se r = P + hui e
s = Q + hvi abbiamo
|u · v|
cos ϑ(r, s) = | cos ϑ(u, v)| =
kukkvk
(il modulo serve per selezionare l’angolo acuto tra i due vettori).
Bisettrici di rette incidenti?
3.3.4.2 (angolo tra rette e piani). L’angolo tra una retta r e un piano π incidenti si
definisce come l’angolo tra la retta r e la sua proiezione ortogonale sul piano π, ed è il
minimo degli angoli formati da r con rette del piano π. Se r = P + hui e π = Q + hv, wi,
allora risulta:
π
ϑ(r, π) = − ϑ(u, v × w)
2
dove ϑ(u, v × w) indica l’angolo acuto tra le direzioni di u e quella di v × w.
3.3.4.3 (angolo tra piani). L’angolo tra due piani si definisce come l’angolo (acuto) tra
vettori perpendicolari ai due piani, quindi se i piani sono π1 e π2 abbiamo
a1 a2 cos ϑ(π1 , π2 ) = | cos ϑ(v1 × w1 , v2 × w2 )| = | cos ϑ( b1 , b2 )|
c1
c2
(vi , wi vettori direttori di πi , ai , bi , ci coefficienti direttori dell’equazione di πi ).
Bisettori di piani incidenti?
3.3.5
Aree e Volumi.
3.3.5.1 (area di parallelogrammi e triangoli). Dati tre punti P, Q, R non allineati, il
parallelogramma da essi determinato è l’insieme dei punti P + α(Q − P ) + β(R − P ) con
α, β ∈ [0, 1], mentre il triangolo avente quei vertici è il sottinsieme per cui α, β, α + β ∈ [0, 1]
(sono comunque nel piano dei tre punti).
CAPITOLO 3. GEOMETRIA LINEARE.
76
L’area di un parallelogramma determinato da tre vertici P, Q, R o da due vettori v =
Q − P , w = R − P è data da kv × wk. L’area del triangolo con quei vertici è la metà di
quella del parallelogramma.
3.3.5.2 (volume di parallelepipedi). Dati quattro punti P, Q, R, S non complanari, il
parallepipedo da essi determinato è l’insieme dei punti P +α(Q−P )+β(R−P )+γ(S −P ) con
α, β, γ ∈ [0, 1], mentre il tetraedro avente quei vertici è il sottinsieme per cui α, β, γ, α+β+γ ∈
[0, 1].
Il volume di un parallelepipedo determinato da quattro vertici P, Q, R, S o da tre vettori
u = Q − P , v = R − P , w = S − P è data da |u · (v × w)| = | det(u v w)|. Il volume del
tetraedro con quei vertici è un sesto di quello del parallelepipedo.
3.3.6
Quadriche.
A parte quelle degeneri (che si spezzano cioè in coppie di piani, o in un piano doppio), le
quadriche (zeri di equazioni di secondo grado in tre variabili) si dividono nei seguenti tipi,
di cui segnaliamo le equazioni in coordinate opportune:
2
2
2
Y
Z
3.3.6.1 (ellissoidi e sfere). Hanno equazioni del tipo X
a2 + b2 + c2 = d(6= 0), e si dicono
di rotazione se alcuni tra a, b, c coincidono, sfere se a = b = c. Se d < 0 non hanno punti
reali.
2
2
2
Y
Z
3.3.6.2 (iperboloidi). Hanno equazioni del tipo X
a2 + b2 − c2 = d(6= 0), e si dicono
di rotazione se alcuni tra a, b, c coincidono. A seconda che d sia positivo o negativo, gli
iperboloidi assumono due forme diverse: a una falda (e contengono rette) oppure a due falde
(e non contengono rette).
3.3.6.3 (paraboloidi). Hanno equazioni del tipo Z = aX 2 + bY 2 (a, b 6= 0), e si dicono di
rotazione se a = b. A seconda che a e b siano discordi o concordi, i paraboloidi assumono
due forme diverse: superficie a sella (e contengono rette) oppure paraboloide rotondo (e non
contengono rette).
3.3.6.4 (coni e cilindri). Sono cilindri se si possono scrivere senza la variabile Z, coni se
si scrivono nella forma Z 2 = aX 2 + bY 2 .
3.3.6.5 (equazioni generali di secondo grado). vedi A.3.11.
Appendice A
Addendum
A.1
A.1.1
Insiemi numerici e funzioni
Verifica delle proprietà distributive di unione ed intersezione:
per esempio verifichiamo la seconda, mostrando separatamente le due inclusioni.
Se x ∈ A ∩ (B ∪ C) allora x ∈ A e x ∈ B ∪ C. Quindi abbiamo x ∈ A e x ∈ B
(oppure x ∈ C), da cui risulta che x ∈ A ∩ B (oppure x ∈ A ∩ C), e quindi in ogni caso
x ∈ (A ∩ B) ∪ (A ∩ C); questo mostra che A ∩ (B ∪ C) ⊆ (A ∩ B) ∪ (A ∩ C).
Viceversa, basta rifare i passaggi al contrario per ottenere l’altra inclusione A ∩ (B ∪ C) ⊇
(A ∩ B) ∪ (A ∩ C).
Quindi concludiamo che i due insiemi sono uguali.
A.1.2
Verifica delle proprietà di De Morgan:
per esempio verifichiamo la prima.
Se x ∈ {(A ∩ B) allora x ∈
/ A ∩ B, e quindi x ∈
/ A (oppure x ∈
/ B), da cui x ∈ {A (oppure
x ∈ {B), e infine x ∈ {A ∪ {B. Questo mostra che {(A ∩ B) ⊆ {A ∪ {B. Si vede facilmente
che i passaggi funzionano anche al contrario, da cui l’altra inclusione e l’uguaglianza.
A.1.3
Proprietà del prodotto cartesiano di insiemi:
per esempio si può vedere che:
relazione con il vuoto: A × B = ∅ se e solo se A = ∅ oppure B = ∅.
relazione con l’unione: A × (B ∪ C) = (A × B) ∪ (A × C).
relazione con l’intersezione: A × (B ∩ C) = (A × B) ∩ (A × C).
relazione con il complementare: A × ({B) ⊆ {(A × B) (di solito sono diversi),
e ({A × {B) ⊆ {(A × B) (di solito sono diversi),
e {(A × B) = ({A × {B) ∪ (A × {B) ∪ ({A × B).
314
APPENDICE A. ADDENDUM
A.1.4
315
Alcuni esempi di relazioni di equivalenza:
♣ Nell’insieme dei numeri naturali la relazione “essere esattamente divisibili per la stessa
potenza di 10” è una relazione di equivalenza (si dice che 10i divide esattamente n se 10i
divide n e 10i+1 non divide n). Quali sono le classi di equivalenza?
♣ Nell’insieme dei numero interi la relazione “la differenza è divisibile per 10” è una
relazione di equivalenza. Quali sono le classi di equivalenza?
♣ Nell’insieme dei numeri razionali la relazione “la differenza è un numero intero” è una
relazione di equivalenza?
♣ Nell’insieme dei numeri reali la relazione “la differenza è un numero razionale” è una
relazione di equivalenza?
♣ La relazione di parallelismo (risp. perpendicolarità) tra rette nel piano è una relazione
di equivalenza? Quali sono eventualmente le classi di equivalenza?
A.1.5
Alcuni esempi di relazioni d’ordine:
♠ Nell’insieme dei numeri naturali, m 6 n definita da “esiste l ∈ N tale che n = m + l”
è una relazione d’ordine totale, con minimo assoluto 0, senza massimo assoluto.
♠ Nell’insieme dei numeri naturali, m|n (m divide n) definita da “esiste l ∈ N tale che
n = ml” è una relazione d’ordine parziale, con minimo assoluto 1, senza massimo assoluto.
♠ Definire l’ordine lessicografico che si usa nel vocabolario, e provare ad applicarlo ai
numeri naturali.
♠ Dato un insieme X, sull’insieme formato da tutti i suoi sottinsiemi vi è l’ordine naturale
parziale dato dall’inclusione: vi sono massimo e minimo assoluti?
♠ Nei numeri interi, scelto un numero primo p, si consideri la relazione z 6p w se la
potenza di p che divide z è maggiore della potenza di p che divide w. È una relazione di
ordine? Vi sono minimo e massimo?
♠ Equivalenza associata ad una relazione riflessiva e transitiva: diciamo che a ∼ b se
a 6 b e b 6 a. Mostrare che ∼ è una relazione di equivalenza e che A/ ∼ è insieme ordinato.
♠ ♠ Determinare, se esistono, massimi, minimi, estremi superiori ed inferiori (in R):
•{x ∈ Q : x2 ∈ [2, 3]}
•
n
:n∈N
n+1
•{x ∈ Q : x2 ∈ [2, 4]}
•
n
: n ∈ Z r {−1}
n+1
•{x2 + x : x ∈ R}
•{x2 + x : x ∈ [−1, 1]}
•{x/y : x, y ∈ [−1, 0)}
•{x/y : x, y ∈ (−1, 0)}
•{x ∈ Q : x2 ∈ [1, 3]}
•
1
: n ∈ N r {0}
n
•
1
: n ∈ Z r {0}
n
APPENDICE A. ADDENDUM
A.1.6
316
Coefficienti binomiali
♦ Mostrare che
X
n n
n−i
•
=
k
k−1
i=1
•
n X
n
i=0
•
i
n
X
i n
•
(−1)
=0
i
i=0
n
=2
p X
n n−i
i=0
p−i
i
X
n n
n−i
•
=
k
k−i+1
i=0
= 2p
n
X
n
•
i i! = (n + 1)! − 1
p
i=1
♦ Studiare gli sviluppi del trinomio (x + y + z)n per ogni n ∈ N, analogamente a quanto
fatto per il binomio; in particolare definire dei coefficienti trinomiali e discutere le loro
relazioni ricorsive.
A.1.7
Dimostrazioni per induzione.
♦ Si verifichi per induzione e/o direttamente che:
•
•
n
P
•
j=1
n(n + 1)
2
n−1
P
(1 + 2j) = n2
•
j=
n
P
k=0
j2 =
j=1
j=0
•
n
P
n(n + 1)(2n + 1)
6
n−1
P
(1 + 3j + 3j 2 ) = n3
•
1 − xn+1
1−x
•
n
P
k=1
j3 =
j=1
•
j=0
xk =
n
P
n2 (n + 1)2
4
•
n
P
j 4 =?
j=1
n−1
P
(1 + 4j + 6j 2 + 4j 3 ) = n4
···
j=0
xk = x
xn − 1
x−1
•
n
P
(1 + xk ) = n + x
k=1
xn − 1
x−1
(per il primo, ricordarsi della storiella di Gauss bambino; per la prima riga usare gli sviluppi
del binomio).
♦ Calcolare la somma dei primi n numeri naturali dispari e la somma dei primi n numeri
naturali pari per ogni n. Dare una dimostrazione per induzione del proprio risultato.
♦ Calcolare le seguenti somme, e verificare per induzione il proprio risultato:
Pn
Pn
Pn
Pn
• i=1 (−1)i i • i=1 (−1)i i2 • i=1 2i • i=1 (−1)i 2i
♦ * Confronto delle Medie Aritmetica e Geometrica. Per ogni
Pn n ∈ N positivo
e ogni famiglia a1 , . . . an di reali positivi, la media aritmetica è m = n1 i=1 ai , mentre la
Qn
media geometrica è g = ( i=1 ai )1/n . Mostrare che m > g (e vale l’uguaglianza
se e solo se
n
Qn
Pn
tutti gli ai sono uguali). Conviene dimostrare che i=1 ai 6 n1 i=1 ai procedendo per
induzione...
♦ * Disuguaglianze di Bernoulli.
(a) Dimostrare che per ogni n ∈ N e ogni x ∈ R con x > −1 si ha (1 + x)n > 1 + nx (e
vale l’uguaglianza se e solo se x = 0 oppure n ∈ {0, 1};
1
(b) Dimostrare che per ogni n ∈ N e ogni x ∈ R con n1 > x > −1 si ha 1−nx
> (1 + x)n .
♦ * Dimostrare che per ogni n ∈ N abbiamo (1 + a1 ) · · · (1 + an ) > 1 + a1 + · · · + an , se
ai ∈ R hanno tutti lo stesso segno e sono tutti maggiori di −1.
APPENDICE A. ADDENDUM
A.1.8
317
Richiami sulla divisione euclidea:
Dati due numeri interi a, b ∈ Z, esistono unici q, r ∈ Z (quoziente e resto) con 0 6 r < |b|
tali che
a = bq + r
(divisione euclidea di a per b con quoziente q e resto r)
e abbiamo che
M CD(a, b) = M CD(b, r)
che permette un calcolo induttivo del M CD visto che ad ogni passo diminuisce strettamente
la coppia. Questo procedimento si chiama algoritmo di Euclide e garantisce anche che
M CD(a, b) = αa + βb
con α, β ∈ Z opportuni.
Per esempio abbiamo
M CD(1234, 56789) = M CD(56789, 1234) = M CD(1234, 25) = 1
e che
1 = (−11)1234+(543)25 = (−11)1234+(543)[56789−1234(46)] = (543)56789+(1245)1234 .
Altro esempio:
M CD(12345, 6789) = M CD(6789, 5556) = M CD(5556, 1233) =
= M CD(1233, 624) = M CD(624, 609) = M CD(609, 15) = 3
e quindi si può scrivere 3 come combinazione intera di 12345 e 6789.
APPENDICE A. ADDENDUM
A.1.9
318
Scrittura decimale dei razionali
Dato uno sviluppo finito, il numero razionale si ottiene moltiplicando e dividento per 10
elevato al numero di cifre dopo la virgola.
Se lo sviluppo è illimitato periodico, allora basta considerare il numero come q = ι, απ
(dove ι, α, π sono rispettivamente le parti intera, antiperiodo, periodo; sono sequenze di i, a, p
cifre), e osservare che 10a+p q − 10a q = ιαπ − ια (numeri interi), da cui
q=
ιαπ − ια
10a+p − 10a
cioè: la frazione si ottiene con il numeratore dato dalla differenza tra il numero (senza alcun
segno di virgola e periodo) e la parte che precede il periodo, e il denominatore dato da tanti
9 quante le cifre del periodo, tanti 0 quante le cifre dell’antiperiodo.
Per esempio
12345678 − 12345
12333333
=
.
123, 45678 =
5
2
10 − 10
99900
Se si applica il procedimento a ι, α9 al numeratore viene ια9 − ια che si vede subito essere
divisibile per 9: infatti ια9 − ια = ια0 + 9 − ια = 9 · ια + 9 = 9 · (ια + 1), e il risultato è un
numero razionale con sviluppo decimale limitato!
A.1.10
Sistemi di numerazione in base qualsiasi
Scriviamo αβγδb per intendere le cifre α, β, γ, δ di un numero espresso in base b: per
esempio
12310 = 1 · 102 + 2 · 10 + 3 = 123
1238 = 1 · 82 + 2 · 8 + 3 = 83
1234 = 1 · 42 + 2 · 4 + 3 = 27
(se non scriviamo alcun pedice intendiamo in base 10, giusto per abitudine antropomorfa). Le
cifre nella scrittura in base b sono i numeri compresi tra 0 e b − 1, cioè 0, 1, 2, 3, . . . , b − 1. Nel
caso esadecimale, cioè con b = 16, le cifre si indicano con 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, a, b, c, d, e, f ;
quindi per esempio
4af16 = 4 · 162 + 10 · 16 + 15.
Per passare da base 10 a base b basta usare ripetutamente la divisione con resto per
trovare le cifre nella espressione
x = α0 + α1 · b + α2 · b2 + α3 · b3 + · · ·
cioè si comincia con α0 (resto della divisione di x per b), poi si continua per induzione sul
quoziente (che è (x − α0 )/b).
APPENDICE A. ADDENDUM
A.1.11
319
Esercizi sui numeri complessi.
Calcolare z −1 , w−1 , zw, zw−1 , z −1 w, z 2 , z 3 , z 4 , le radici quadrate di z e le radici
cubiche di z per le seguenti coppie:
•z = 1 + i , w = 2 − i
•z = 1 − i , w = 1 + 2i
•z = 2eiπ/3 , w = 3eiπ/4
•z = cos π4 + i sin π4 , w = i
•z = cos θ + i sin θ , w = ±i
•z = a + ib , w = eiφ
Risolvere le seguenti equazioni/disequazioni in C, disegnando l’insieme delle soluzioni
nel piano di Gauss:
•z 2 + iz + 1 = 0
•z 2 + iz − 1 = 0
•z 2 − (1 + i)z + i = 0
•|z − 1 + i| 6 5
•|z − 1 + i| < |1 + i|
•|z − 1 + i| < |z + 1|
•|z − 1 + i| < |2z − 1 + i|
•(z + i)(z̄ + i) ∈ R
•(z + i)(z̄ − i) ∈ R
Dall’espressione (cos θ+i sin θ)n = cos(nθ)+i sin(nθ) ricavare le formule di n-plicazione
dell’angolo, cioè espressioni di cos(nθ) e sin(nθ) in termini di cos θ e/o sin θ.
Determinare cos(5t), cos(8t), sin(6t), sin(9t) in termini delle funzioni trigonometriche
di argomento t (e loro potenze).
Scrivere (e disegnare sul piano di Gauss) le radici n-esime di −i, 1 + i, 1 − i per
n = 2, 3, 4, 5, 6.
Calcolare le lunghezze ln (risp. Ln ) dei lati dei poligoni regolari di n lati inscritti (risp.
circoscritti) nella circonferenza unitaria. Quanto valgono i limiti nln e nLn quando n “va
all’infinito”?
Se |z| = 1, è vero che le radici n esime di z si ottengono ruotando opportunamente (e
di quanto?) le radici n-esime dell’unità?
La somma di tutte le radici n-esime di 1 è nulla, il loro prodotto quanto vale?
Determinare e disegnare sul piano di Gauss le famiglie di logaritmi di 1, −1, i, −i, 1 + i.
Calcolare e disegnare sul piano di Gauss ii , (−i)i , ie , ei come numeri complessi.
Inversione del cerchio: studiare le funzioni di C r {0} in sè ottenute mandando z
in 1/z e 1/z. È vero che entrambe rispettano il circolo unitario (in che senso?)? È vero
che invertono interno ed esterno del circolo unitario? Determinare l’immagine delle “rette
verticali”.
APPENDICE A. ADDENDUM
A.1.12
320
Esercizi sulle funzioni.
Discutere dominio, immagine, iniettività, suriettività, eventuali inverse per le seguenti
funzioni:
•f : N → N f (n) = n, n2 , n2 + 1, 2n, n2 − 1
•f : Z → Z f (z) = z, z 2 , z 2 − 1, 2z, |z|, z − |z|
√
1
1
ax + b
•f : R → R f (x) = x, , x2 , x2 − 1, x, |x|, x − |x|,
,
x
x − 1 cx + d
(a, b, c, d ∈ R)
Determinare le composizioni f ◦ f , f ◦ g, g ◦ f , g ◦ g e discuterne le proprietà per le
seguenti coppie di funzioni reali:
•f (x) = x − 5, g(x) = x2 − 1
1
x+1
, g(x) =
x−1
x
p
√
•f (x) = x2 − 1, g(x) = x − 1
•f (x) =
Si studino le proprietà di iniettività, suriettività, eventuali inverse destre e sinistre per
le seguenti funzioni C → C:
•f1 (z) = z 2 + i
•f2 (z) = (z + i)2
(
z/|z| se z 6= 0
•f4 (z) =
0
se z = 0
(
z/z
•f5 (z) =
0
•f3 (z) = z − z
se z 6= 0
se z = 0
•f (z) =
αz + β
con α, β, γ, δ ∈ C
γz + δ
APPENDICE A. ADDENDUM
A.1.13
321
Verifica del limite di e:
Vi sono vari modi elementari di procedere: per esempio usando lo sviluppo del binomio
abbiamo
n
n 1
n 1
1
n 1
n 1
+
·
·
·
+
+
·
·
·
+
1+
=1+
+
i ni
n nn
n
1 n
2 n2
1 n!
1 (n − 1) · · · (n − i + 1)
1n−1
+ ··· +
+ ··· +
=1+1+
2 n
i!
ni
n! nn
n−1 1
i
1
1
1
2
i−1
1 Y
=1+1+
1−
1−
+ ··· +
1−
1−
··· 1 −
+ ··· +
2
n
i!
n
n
n
n! 1
n
da cui si deduce già la crescenza (aumentando n aumenta ogni addendo, e si aggiungono
addendi positivi), e stimando brutalmente:
n
1
1
1
1
6 1 + 1 + + ··· + + ··· +
1+
n
2
i!
n!
61+1+
1
1 − 2n+1
1
1
1
+ ··· + i + ··· + n = 1 +
63.
2
2
2
1 − 21
In alternativa si dimostri direttamente che la successione fn = (1 +
stimando che il rapporto fn+1 /fn è maggiore di 1 ragionando cosı̀:
1+
1
n+1
n+1 1+
1
n
n
=
1 n
n)
è crescente
n+1 1
1
1
1
1+
1−
1
−
=1
>
1
+
n
(n + 1)2
n
n+1
e con la stessa tecnica si dimostri che la successione gn = (1+ n1 )n+1 (che maggiora ovviamente
Nepero) è decrescente stimando gn /gn+1 :
n+1 n+2 n+2 n
n
1
1
1
1
1+
1+
=
1+
>
1+
=1
n
n+1
n+1
n(n + 2)
n+1
n
(che limite ha?), e quindi limita la serie di Nepero. Usando che
2 = f1 < fk < fm < gm < gk < g1 = 4
vediamo anche che gn − fn → 0, quindi e è sia sup fn , sia inf gn e dalle disuguaglianze
1+
1
n
n
<e<
1+
1
n
n+1
si ricavano le disuguaglianze
1
1
1
< log 1 +
< .
n+1
n
n
APPENDICE A. ADDENDUM
A.1.14
322
Criteri di Cesaro:
Vi sono varie asserzioni che passano sotto il nome di Cesaro. I due criteri di Cesaro-Stolz
(C1) se bn è successione positiva, crescente e illimitata, allora
lim
an+1 − an
an
= ` =⇒ lim
=`
bn+1 − bn
bn
(C2) se bn è successione positiva, decrescente e infinitesima, allora
lim
an
an − an+1
= ` =⇒ lim
=`
bn − bn+1
bn
(in entrambi i casi non vale il viceversa: il limite a destra può esistere anche senza quello a
sinistra).
I teoremi di Cesaro si possono dimostrare usando (C1):
(1)
n
1X
lim xn = ` =⇒ lim
xi = `,
n i=0
(2)
lim(yn+1 − yn ) = ` =⇒ lim
yn
= `,
n
(1’)
lim xn = ` =⇒ lim
n
Y
! n1
xi
= `,
i=0
(2’)
lim
yn+1
√
= ` =⇒ lim n yn = `.
yn
Usando questi criteri si può mostrare per esempio che:
lim
log n
= 0,
n
lim
√
n
n = 1,
lim
1√
n! = e−1 ,
n
lim log
√
n
1 + an = log a.
APPENDICE A. ADDENDUM
A.1.15
323
Esercizi sui limiti di successioni:
Si calcolino se esistono i limiti delle seguenti successioni:
1−n
n2
√
√
• n− n+1
•
•
1
n!
•
cos(nπ/2)
•
n
1
• 1+
n
n
(−1)n
•1 + (−1)n
n−1
p
√
• n(n + 1) − n • n n + 1
n
2n
√
• n−n
•
•
n!
nn
•
sin(nπ/2)
• 2
n −n
1
• 1−
n
n
(−3)n
n!
•
1
• log 2 −
n
1
• 1+
n
n+4
n+1
n
n
−n
1
• 1−
n
n
2
• 1−
n
• sin n1
• sin n
2n
n2
√
• n 2n + 3n
•
−n
Dopo aver dato
determinare,
p la definizione di limite per una successione,
p
p se esiston(6n − 1)
n(2n − 1)
2n(n + 1)
n
, lim p
, lim
, lim
,
no, i limiti lim
n→∞
n→∞
n→∞
n→∞
n
n
n+2
n(n
p − 1)
√
√
n(5n − 1)
2n
2n2 + 2
3n2 + 3
4n − 1
lim
, lim
, lim
, lim √
,
, lim p
2
n→∞
n→∞
n→∞
n→∞
n→∞
n+2
n+2
2n − 1
n +1
n(5n − 1)
√
√
√
n2 + 1
n2 + 1
2n − n
lim p
, lim √
, lim √
.
n→∞
n→∞
n→∞
n
−
5n
n2 + 1
n(5n − 1)
APPENDICE A. ADDENDUM
A.1.16
324
Esercizi sulle serie:
Determinare la somma delle seguenti serie:
•
∞ 3n + 4n
P
5n
n=0
∞
P
1
•
2−1
n
n=0
•
∞ 1 − 2n
P
3n
n=0
∞ 2n+1
P
•
n
n=1 3
•
∞
P
n=1
n2
1
+n
•
∞
P
1
•
3
·
2n
n=0
•
∞
P
1
(n
+
2)(2n
+ 2)
n=0
∞
P
n=0
1
1
− n+1
2n
2
•
∞
P
1
n(n
+ 2)
n=0
∞ √
√
P
( 2n + 1 − 2n − 1)
•
n=0
Determinare il carattere (convergente, divergente, irregolare) delle seguenti serie:
∞
P
n
•
2
n=2 n + n
•
∞
P
log
n=1
n+1
n
∞
P
∞ log n + sin n + 5n
P
√
•
3
n7
n=1
•
•
•
∞ n
P
n
n=1 e
•
∞ (−1)n
P
n2
n=1
•
∞ √
P
( n n − 1)n
n=1
log
n=1
n
2
n=1 n − 1
•
∞
P
n2 + 1
n2
∞
P
•
•
•
•
∞ (2n)!
P
n+1
n=1 2
•
•
√
∞ (−1)n n
P
1+n
n=1
•
∞
P
n=1
enx
2
e
n
− n−1
•
n=2
1
n=1 log n
•
∞
P
∞ (n + 1)!
P
nn
n=1
∞
P
p
n(1 +
n2 )
∞ nk
P
n=1 n!
∞
P
(−1)n sin
n=1
∞
P
n=1
nxn
•
•
1
n
n
n=1
n−1
n
∞
P
(−1)n log
n=1
1
n=1
•
•
∞
P
∞
P
•
n=1
n+1
n
•
∞ sin n
P
n
n=1 3
•
∞ nn
P
n=1 n!
•
n−1
n
∞ n cos(nπ)
P
2
n=1 n + 1
∞
P
n=1
3n
1
+n
∞ n!
P
n
n=1 n
•
∞
P
∞
P
1
1
•
(−1)n log 1 +
n
n
log
n
n=1
n=1
•
∞ xn
P
n
n=1 n
•
n2
∞ 2n xn
P
2
n=1 n
Dopo aver dato la definizione di somma per una serie, determinare, se esistono, le
n−2
∞ 2n−2
∞
P
P
n2
somme delle serie
e
.
(−1)
n
3n
n=0 3
n=0
Dopo aver dato la definizione di somma per una serie, determinare, se esiste, la somma
n+1
∞ 2n+1
∞
P
P
n n2
della serie
e
il
carattere
della
serie
.
(−1)
n−1
5n−1
n=0 5
n=0
Calcolare la somma delle aree e dei perimetri dei quadrati (risp. triangoli equilateri)
di figura:
APPENDICE A. ADDENDUM
A.2
A.2.1
325
Calcolo in una variabile
Riassunto su equazioni e disequazioni:
Per espressioni reali, principi base:
Equazioni
Disequazioni
P = Q ⇐⇒ P + R = Q + R
P > Q ⇐⇒ P + R > Q + R
P = Q ⇐⇒ P − Q = 0
P > Q ⇐⇒ P − Q > 0
R 6= 0 :
P = Q ⇐⇒ P R = QR
R>0:
R<0:
P > Q ⇐⇒ P R > QR
P > Q ⇐⇒ P R 6 QR
Q 6= 0 :
P = Q ⇐⇒ P/Q = 1
Q>0:
Q<0:
P > Q ⇐⇒ P/Q > 1
P > Q ⇐⇒ P/Q 6 1
P = Q ⇐⇒ −P = −Q
P = Q ⇐⇒ 1/P = 1/Q
P > Q ⇐⇒ −P 6 −Q
P > Q ⇐⇒ 1/P 6 1/Q
P = Q =⇒ P k = Qk
⇐= se P, Q > 0 o k dispari
P > Q =⇒ P k > Qk
⇐= se P, Q > 0 o k dispari
P = log Q ⇐⇒ eP = Q
P > log Q ⇐⇒ eP > Q
R>0:
P = Q ⇐⇒ RP = RQ
R > 1 : P > Q ⇐⇒ RP > RQ
0 < R < 1 : P > Q ⇐⇒ RP 6 RQ
R>0:
P = Q ⇐⇒ logR P = logR Q
R > 1 : P > Q ⇐⇒ logR P > logR Q
0 < R < 1 : P > Q ⇐⇒ logR P 6 logR Q
Strategie generali:
Primo grado: L’equazione ax + b = 0 ha soluzione x = −b/a se a 6= 0; la disequazione
ax + b > 0 ha soluzione x > −b/a se a > 0, (e x 6 −b/a se a < 0);
√
−b ± b2 − 4ac
Secondo grado: L’equazione ax2 + bx + c = 0 ha soluzioni x1,2 =
che
2a
2
sono reali distinte, coincidenti o non reali (complesse coniugate) a seconda che ∆ = b − 4ac
sia positivo, nullo o negativo. La formula si ottiene completando il quadrato di ax2 con
doppio prodotto bx. La disequazione ax2 + bx + c > 0 ha soluzioni interne o esterne alle due
radici reali a seconda che a sia negativo o positivo; se le radici non sono reali, è sempre o
mai verificata.
Sistemi:
Le soluzioni dei sistemi di una o più equazioni/disequazioni sono formate dalle intersezioni delle soluzioni delle singolo equazioni/disequazioni (spesso conviene la
rappresentazione grafica).
Grado qualsiasi: Conviene cercare di fattorizzare il polinomio per ottenere gli zeri, e
studiare i segni di ogni singolo fattore (poi da moltiplicare tra loro, e spesso si fa in forma
grafica). Ricordiamo la regola di Ruffini: z annulla un polinomio P (x) se e solo se x − z
divide P (x) (senza resto); quindi nel caso di polinomi monici a coefficienti interi gli zeri vanno
cercati tra i divisori del termine noto. Vanno tenute presenti anche le formule classiche di
APPENDICE A. ADDENDUM
326
fattorizzazione (prodotto somma/differenza, somme/differenze di quadrati, cubi, potenze,
ecc.).
Razionali: Se compaiono denominatori si impongono le condizioni di non annullamento,
e poi si studiano i segni dei vari fattori.
Con modulo: Ogni modulo dà luogo a due sistemi a seconda che l’argomento sia
positivo o negativo; poi si riuniscono le soluzioni dei vari sistemi.
Irrazionali: Se compaiono radici bisogna imporre le condizioni di positività nel caso di radici pari, ed elevare a potenza per eliminare le radici; si ottengono sistemi di
equazioni/disequazioni.
Esponenziali: Bisogna imporre la positività alle basi.
Logaritmiche: Bisogna imporre la positività agli argomenti.
Spesso si cercano le soluzioni con metodi grafici, confrontando il grafico di due o più funzioni.
A.2.2
Esempi di equazioni:
Si risolvano le seguenti equazioni:
• sin 2x + sin 4x = 0
• tan 2x − cos x = 0
• cos2 2x − cos2 x = 0 •(2 sin x − 1) sin 2x = 2 cos x
√
• cos 5x − cos 3x = 0 • sin 5x + sin x = sin 3x • 3 sin x + cos x = 0
•3x − 3−x = 5
A.2.3
2
•2x = 5 · 2x
•32x − 2 · 3x + 1 = 0
√
•3 sin2 x + 2 3 sin x cos x = 3 cos2 x
• log2 x − log(xn ) + 1 = 0 (n ∈ N)
Esempi di disequazioni:
Si risolvano le seguenti disequazioni:
•x2 − x > x
•x >
√
x+1
√
• 3 x3 − x2 + 1 6 x
x2 − x − 2
>0
x2 − x + 1
√
•x − 3 < x + 1
•
x−1
x+2
>
x+1
3x − 1
√
•x + 1 > 5 − x
•
p
√
√
√
• 2x + 1 + x − 1 > 3x • (3x − 2)2 6 2 − 3x
x−3
x−4
> 2
x2 + x + 1
x −x+1
√
• 3 x3 − 4 > x + 1
•
√
• x+36x−3
•|x − x − 4| 6 3x + 1
•|x + 4| 6 |3x − 2| + 1
3x − 2 >5
•
1−x • log xx−1
2 +1 < 0
• log √x+1
<0
2
x −1
• log2 x − log(x2 ) + 1 > 0
•52x − 2 · 5x − 1 < 0
√
• cos x − sin x > 1
•
2
•
cos x − sin x
>0
cos x + sin x
•0 <
cos x − sin x
61
cos x + sin x
•|x − |x|| > 1
cos 2x
60
cos x + sin 2x
APPENDICE A. ADDENDUM
A.2.4
327
Riassunto di trigonometria:
Relazioni fondamentali:
sin2 + cos2 = 1
tan =
sin
cos
Le formule di addizioni si possono ottenere in vari modi, il più semplice dei quali è l’uso
dei numeri complessi.
sin(α ± β) = sin α cos β ± cos α sin β
cos(α ± β) = cos α cos β ∓ sin α sin β
tan(α ± β) =
tan α ± tan β
1 ∓ tan α tan β
Le formule di duplicazione si ricavano immediatamente e la seconda dà luogo alle formule
per i quadrati e a quelle di bisezione (il segno dipende dal quadrante):
r
1 − cos α
2
r
1 + cos α
2
sin(2α) = 2 sin α cos α
1 − cos(2α)
sin α =
2
cos(2α) = cos2 α − sin2 α
cos2 α =
1 + cos(2α)
2
cos
α
=±
2
tan2 α =
1 − cos(2α)
1 + cos(2α)
tan
α
1 − cos α
sin α
=
=
2
sin α
1 + cos α
2
= 2 cos2 α − 1
= 1 − 2 sin2 α
tan(2α) =
2 tan α
1 − tan2 α
α
sin = ±
2
Le formula di prostaferesi sono equivalenti a quelle di Werner (u, v = α ± β):
u−v
sin u + sin v = 2 sin u+v
2 cos 2
sin α cos β = 12 (sin(α + β) + sin(α − β))
u−v
sin u − sin v = 2 cos u+v
2 sin 2
cos α sin β = 12 (sin(α + β) − sin(α − β))
u−v
cos u + cos v = 2 cos u+v
2 cos 2
cos α cos β = 21 (cos(α + β) + cos(α − β))
u−v
cos u − cos v = −2 sin u+v
2 sin 2
sin α sin β = − 12 (cos(α + β) − cos(α − β))
e si ricavano dalle formule di addizione con qualche astuzia.
Le formule parametriche esprimono tutto in funzione di t = tan θ2 e permettono per
esempio di parametrizzare la circonferenza unitaria:
sin θ =
2t
1 + t2
cos θ =
1 − t2
1 + t2
tan θ =
2t
1 − t2
APPENDICE A. ADDENDUM
328
Aggiungiamo in un disegno i valori notevoli (pochissimi!) e le formule di riduzione al
primo quadrante delle funzioni trigonometriche:
π
o
2 , 90 ; 0, 1, +∞
π
π
o
o
2 +α, 90 +α; − sin α, cos α, −1/ tan α
2 −α, 90 −α; sin α, cos α, 1/ tan α
h
i
√
√
π
45o ; 22 , 22 , 1
4 ,
√
√
√
√
10−2 5 √
π
5+1
o
, 5−2 5
5 , 36 ;
4 ,
4
h
√
√ i
[π−α, 180o −α; − cos α, sin α, − tan α]
3 1
3
π
o
6 , 30 ; 2 , 2 , 3
√
q
√
√
√
10+2 5
5−1
5−2 5
π
o
, 4 ,
10 , 18 ;
4
5
√ √ √ √ √
√
2+ 3
2− 3
π
o
,
, 7−2 3
12 , 15 ;
2
2
[0, 0o ; 1, 0, 0]
[π+α, 180o +α; − cos α, − sin α, tan α]
[−α, −α; cos α, − sin α, − tan α]
[αrad , αo ; cos α, sin α, tan α]
Applicazioni ai triangoli: Dato un triangolo di lati a, b, c e angoli interni α, β, γ (ogni
angolo opposto alla lettera romana corrispondente, allora la superficie del triangolo vale
1
1
1
ab sin γ = ac sin β = bc sin α
2
2
2
per ogni lato abbiamo le formule di Carnot (o dei coseni)
a2 = b2 + c2 − 2bc cos α ,
b2 = a2 + c2 − 2ac cos β ,
e valgono le formule dei seni:
a
b
c
=
=
sin α
sin β
sin γ
(basta dividere per abc le formule delle aree).
c2 = a2 + b2 − 2ab cos γ ,
APPENDICE A. ADDENDUM
A.2.5
329
Riassunto di trigonometria iperbolica:
Relazioni fondamentali:
cosh2 − sinh2 = 1
tanh =
sinh
cosh
Le formule di addizioni si possono ottenere per calcolo diretto
sinh(α ± β) = sinh α cosh β ± cosh α sinh β
cosh(α ± β) = cosh α cosh β ± sinh α sinh β
tanh α ± tanh β
1 ± tanh α tanh β
tanh(α ± β) =
Le formule di duplicazione si ricavano immediatamente e la seconda dà luogo alle formule
per i quadrati e a quelle di bisezione (il segno dipende dal quadrante):
sinh(2α) = 2 sinh α cosh α
2
2
cosh(2α) = cosh α + sinh α
= 2 cosh2 α − 1
= 1 + 2 sinh2 α
tanh(2α) =
2 tanh α
1 + tanh2 α
r
cosh α − 1
2
r
cosh α + 1
2
cosh(2α) − 1
sinh α =
2
α
sinh = ±
2
cos(2α) + 1
cosh α =
2
α
cosh = ±
2
2
2
tanh2 α =
cosh(2α) − 1
cosh(2α) + 1
tanh
α
cosh α − 1
sinh α
=
=
2
sinh α
cosh α + 1
Le formula di prostaferesi sono equivalenti a quelle di Werner (u, v = α ± β):
u−v
sinh u + sinh v = 2 sinh u+v
2 cosh 2
sinh α cosh β = 12 (sinh(α + β) + sinh(α − β))
u−v
sinh u − sinh v = 2 cosh u+v
2 sinh 2
cosh α sinh β = 12 (sinh(α + β) − sinh(α − β))
u−v
cosh u + cosh v = 2 cosh u+v
2 cosh 2
cosh α cosh β = 12 (cosh(α + β) + cosh(α − β))
u−v
cosh u − cosh v = 2 sinh u+v
2 sinh 2
sinh α sinh β = 12 (cosh(α + β) − cosh(α − β))
e si ricavano dalle formule di addizione con qualche astuzia.
Le formule parametriche esprimono tutto in funzione di t = tanh θ2 e permettono per
esempio di parametrizzare l’iperbole equilatera:
sinh θ =
2t
1 − t2
cosh θ =
1 + t2
1 − t2
tanh θ =
2t
1 + t2
APPENDICE A. ADDENDUM
A.2.6
330
Riassunto sui limiti:
A seconda che x0 sia in R oppure ∞ o ±∞, e lo stesso per `, cambia la forma degli intorni
del punto (intervalli, unione di semirette, semirette) e di conseguenza la filastrocca per la
definizione di limite, secondo la seguente tabella:
`
x0
∈R
∞
+∞
−∞
∈R
∀ε > 0 ∃δ > 0 :
∀M > 0 ∃δ > 0 :
|x − x0 | < δ ⇒ |f x − `| < ε |x − x0 | < δ ⇒ |f x| > M
∀M > 0 ∃δ > 0 :
|x − x0 | < δ ⇒ f x > M
∀M > 0 ∃δ > 0 :
|x − x0 | < δ ⇒ f x < −M
∞
∀ε > 0 ∃N > 0 :
|x| > N ⇒ |f x − `| < ε
∀M > 0 ∃N > 0 :
|x| > N ⇒ |f x| > M
∀M > 0 ∃N > 0 :
|x| > N ⇒ f x > M
∀M > 0 ∃N > 0 :
|x| > N ⇒ f x < −M
+∞
∀ε > 0 ∃N > 0 :
x > N ⇒ |f x − `| < ε
∀M > 0 ∃N > 0 :
x > N ⇒ |f x| > M
∀M > 0 ∃N > 0 :
x > N ⇒ fx > M
∀M > 0 ∃N > 0 :
x > N ⇒ f x < −M
−∞
∀ε > 0 ∃N > 0 :
x < −N ⇒ |f x − `| < ε
∀M > 0 ∃N > 0 :
x < −N ⇒ |f x| > M
∀M > 0 ∃N > 0 :
x < −N ⇒ f x > M
∀M > 0 ∃N > 0 :
x < −N ⇒ f x < −M
APPENDICE A. ADDENDUM
A.2.7
331
Esercizi sui limiti:
Si calcolino se esistono i seguenti limiti:
x2 − 1
x→1 x − 1
• lim
x2 − 3x + 2
x→2
x−2
x+1
x→±∞ x2 + 1
• lim
• lim
x + x2
x→±∞ x2 + 1
• lim
• lim
x→+∞
1
1+
x
x
• lim
x→+∞
• lim
x
1
1+
x→−∞
x
• lim
a > 0, m, n, p, q ∈ N
• lim
sin x
• lim √
x→0
x
• lim+ x log x
x→0
A.2.8
x−2
x→2 x3 − 8
√
4x 3 x − x
• lim √
x→−∞ 3 2x4 + 1
• lim
1
1−
x
x
• lim
x→+∞
• lim
xm+n − am xn
x→a xp+q − ap xq
• lim
• lim
cos x − 1
x→0
x
• lim
• lim+ xx
• lim
• lim
xn − 1
x→∞ x − 1
• lim
x−n − 1
(n ∈ N)
x→∞ x − 1
• lim
−x
• lim
x→+∞
−x
1
1+
x→−∞
x
x
1
1−
x→−∞
x
x→0
1
1+
x
x−n − 1
(n ∈ N)
x→1 x − 1
xn − 1
x→1 x − 1
• lim
1
1−
x
−x
−x
1
1−
x→−∞
x
• lim
(a + x)m − (a − x)m
x→0 (a + x)n − (a − x)n
• lim
• lim
x→+∞
x→−∞
1+
1+
a bx
x
a bx
x
√
√
p
a+x− pa−x
√
• lim √
x→0 q a + x − q a − x
cos 2x − 1
x→0 cos 3x − 1
sin 2x
x→0 sin 3x
• lim
log(1 + x)
x→0
x
• lim
x log(1 − x)
x→0
sin x
• lim
x→+∞
a+x
b+x
Limiti usando de L’Hôpital
Si calcolino se esistono i seguenti limiti, usando eventualmente la regola di De L’Hôpital:
x − sin x
1
1 − cos x
2
x cos x
x + sin x
• lim
• lim
− 2
• lim
• lim
• lim
x→∞ x + cos x
x→0
x→0 1 − cos x
x→0
x→0 x − sin x
x2
x3
x
x−1
• lim x
x→1 e − e
• lim+ x log x
• lim
• lim+ xsin x
• lim+ (sin x)x
• lim (ex − 1)
x→0
2
x→0
x→0
x→1
x→0
1
1
−
log x x − 1
x
• lim (log x − log(log x))
x→∞
x→0
1
• lim x x
x→+∞
1
• lim+ xe x
2x − 3x
x→0 4x − 5x
• lim
x
APPENDICE A. ADDENDUM
A.2.9
332
Esercizi sulla continuità:
Discutere la continuità delle seguenti funzioni:
√
2
1 − x se 0 6 x < 1
x
•f (x) = 1
•f (x) = 1
se 1 6 x < 2
2
se x > 2
0
(p
•f (x) =
se 0 < |x| 6 1
se x = 0
se |x| > 1
(
(x + 3)2 − 1
•f (x) =
a − (x + 1)2
|x| se x ∈ [−4, 4]
ax2
se |x| > 4
se x < −2
se x > −2
(
b − ax
•f (x) =
e2x
se x < 0
se x > 0
x2 + a
•f (x) = sin x
x
0
•f (x) = 1 − x2
1 + x2
se x < −1
se −1 6 x < 0
se x > 0
(
x
se x ∈ [2n, 2n + 1)
•f (x) =
, n∈Z
−x se x ∈ [2n + 1, 2n + 2)
√
− x2 − 1
√
•f (x) =
1 − x2
√ 2
x −1
A.2.10
se x < −1
se −1 6 x 6 1
se x > 1
(
a
•f (x) =
x sin x1
se x < 0
se x > 0
se x < 0
se x > 0
Esercizi sugli asintoti:
Discutere gli eventuali asintoti delle seguenti funzioni:
•f (x) =
A.2.11
√
x2 − 1
•f (x) =
x−a
x−b
•f (x) =
x2 + 1
2x + 1
•f (x) =
x3
3x2 + 1
Verifica del teorema di Weierstrass:
Questo teorema è difficile e richiede essenzialmente la nozione di insieme compatto: un
sottinsieme di uno spazio metrico si dice compatto se da ogni successione di può estrarre
almeno una sottosuccessione convergente (per esempio R non è compatto).
Il teorema segue allora da questi due risultati:
Bolzano-Weierstrass:
gli intervalli chiusi e limitati di R sono compatti (più in
generale, i compatti di Rn sono i chiusi limitati);
immagini continue di compatti sono compatti.
APPENDICE A. ADDENDUM
A.2.12
333
Verifica delle derivate elementari:
Possiamo scrivere per esempio:
(1)
(1 + ε/x)α − 1
(1 + δ)α − 1
(x + ε)α − xα
= lim xα−1
= xα−1 lim
= αxα−1
ε→0
ε→0
δ→0
ε
ε/x
δ
(xα )0 = lim
(2)
ex+ε − ex
eε − 1
= lim ex
= ex
ε→0
ε→0
ε
ε
(ex )0 = lim
(3)
(log x)0 = lim
ε→0
log(1 + ε/x)
1 log(1 + ε/x)
1
log(x + ε) − log x
= lim
= lim
=
ε→0
ε→0 x
ε
ε
ε/x
x
(4)
(sin x)0 = lim
ε→0
A.2.13
sin x cos ε + cos x sin ε − sin x
cos x sin ε
sin(x + ε) − sin x
= lim
= lim
= cos x
ε→0
ε→0
ε
ε
ε
Verifica della regola di Leibniz:
Per esempio si può calcolare:
f (x + ε)g(x + ε) − f (x)g(x)
ε
f (x + ε)g(x + ε) − f (x)g(x + ε) + f (x)g(x + ε) − f (x)g(x)
= lim
ε→0
ε
f (x + ε) − f (x)
g(x + ε) − g(x)
= lim
g(x + ε) + lim f (x)
ε→0
ε→0
ε
ε
= f 0 (x)g(x) + f (x)g 0 (x)
(f (x)g(x))0 = lim
ε→0
A.2.14
Verifica della regola della catena:
Per esempio si può calcolare:
f (g(x + ε)) − f (g(x))
ε
f (g(x + ε)) − f (g(x)) g(x + ε) − g(x)
= lim
ε→0
g(x + ε) − g(x)
ε
f (g(x) + δ) − f (g(x))
g(x + ε) − g(x)
= lim
lim
ε→0
δ→0
δ
ε
= f 0 (g(x))g 0 (x)
(f (g(x)))0 = lim
ε→0
APPENDICE A. ADDENDUM
A.2.15
334
Verifica della regola di De L’Hôpital:
Conviene prima esplicitare il cosiddetto
teorema di Cauchy: se f (x), g(x) sono funzioni continue nell’intervallo [a, b], derivabili
nell’interno con g 0 (x) 6= 0, allora esiste c ∈]a, b[ tale che
f 0 (c)
f (b) − f (a)
= 0
.
g(b) − g(a)
g (c)
Si tratta di una generalizzazione di Rolle e di Lagrange (entrambi ne sono casi particolari),
che si ottiene applicando Rolle alla funzione h(x) = αf (x) + βg(x) scegliendo α, β ∈ R in
modo che le ipotesi di Rolle siano soddisfatte (h(a) = h(b)).
Ora per dimostrare il caso 0/0 della regola, basta osservare che
lim
x→x0
f (x)
f (x) − f (x0 )
f 0 (x0 )
= lim
= 0lim 0 0
x →x0 g (x )
g(x) x→x0 g(x) − g(x0 )
(dove s’è usata l’indeterminatezza?).
Come trattare il caso ∞/∞?
A.2.16
Esercizi di derivazione:
Derivare le seguenti funzioni:
• log(sin(x2 ))
•ecos(x
•xx
2
)
• sin(log2 (x))
• log(arctan(x)) • arctan(log(x))
• cos(ex )
• cos(e2x )
•earcsin(x)
• log(log x)
• log(log(log x)) • sin(cos x)
• log(sin2 (x)) • sin(log(x2 ))
•ecos
•xx
x
2
(x)
2
• arcsin(ex )
• sin(cos(sin x))
APPENDICE A. ADDENDUM
A.2.17
335
Problemi di funzioni correlate:
Una scala di lunghezza L appoggiata ad una parete sta scivolando. Se il piede della
scala si sposta con velocità v, determinare la velocità di discesa dell’apice della scala.
Una carrucola è posta ad altezza H. Se chi tira la corda si allontana dalla carrucola
con velocità v, qual’è la velocità con cui si alza il carico?
Un cono di altezza H con base circolare di raggio R viene riempito d’acqua a velocità
costante. Come varia l’altezza dell’acqua nel recipiente (discutere entrambe le posizioni)?
Nei cerchi di area A e raggio r, come sono relati A0 e r0 ?
Dati r, S, V rispettivamente raggio, superficie e volume della sfera, come sono relati
r0 , S 0 , V 0 ?
Un cumulo di sabbia mantiene la forma di piramide con base circolare e raggio uguale
all’altezza. Se viene versata sabbia a velocità costante, come varia l’altezza della piramide?
Una goccia sferica d’acqua aumenta con velocità proporzionale alla sua superficie.
Come aumenta il volume? e il raggio?
E se aumenta in modo proporzionale al volume, come variano superficie e raggio?
Due aerei partono insieme da un aeroporto e si dirigono con velocità costanti (siano note) in due direzioni perpendicolari tra loro (oppure con un fissato noto angolo). Determinare
la velocità relativa tra loro, cioè come varia la distanza tra i due aerei.
Se in uno degli aerei un dirottatore decide di fare una collisione con l’altro aereo, come
può calcolare l’angolo di una unica virata in modo da entrare in collisione?
A.2.18
Problemi di massimi e minimi:
Determinare il rapporto tra base e altezza per massimizzare l’area di un rettangolo e
di un triangolo con perimetri fissati, e per minimizzarne il perimetro con l’area fissata.
Determinare il rapporto tra raggio di base e altezza di un barattolo cilindrico per
massimizzare il volume se la superficie laterale (totale) è fissa, e per minimizzare la superficie
totale fissato il volume.
Determinare il rapporto tra raggio di base e altezza di un cono gelato per massimizzare
il volume se la superficie laterale è fissa, e per minimizzare la superficie laterale fissato il
volume.
Inscrivere in una sfera data di raggio R un parallelepipedo di volume massimo.
Inscrivere in un cono circolare di altezza H e raggio di base R un cilindro di volume
massimo.
Inscrivere un cono (risp. cilindro) circolare retto con massimo volume in una sfera di
raggio R.
Da un quadrato di lato L, togliere quattro quadrati di lato x agli angoli per ottenere
una scatola (parallelepipedo aperto): scegliere x per massimizzare il volume.
Un triangolo rettangolo di area data viene fatto ruotare intorno ad un cateto per
ottenere un cono. Per quale forma del triangolo si ottiene il massimo volume?
APPENDICE A. ADDENDUM
A.2.19
336
Esercizi di studio delle funzioni:
Delle seguenti funzioni reali, studiare il dominio di esistenza, la continuità, la derivata prima
e gli intervalli di crescenza e decrescenza, se possibile la derivata seconda, ogni altro aspetto
interessante (asintoti, limiti particolari) fino ad ottenere, se possibile, una approssimazione
del grafico della funzione:
•x3 + x + 1
•
•x2 (x − 2)
x+1
x−1
•
•x(x + 1)(x − 1)
x2 − 1
x2 + 1
•x +
x2 + 1
• √
x
•x|x| +
p
• |1 − x2 |
p
• x2 − |x − 1|
S.2.5
1
x
1
x
•
•
1
x3 + 1
S.2.3
1
+1
S.2.2
x4
√
•x x + 1
•
r
1−x
•
1 + x2
√
• 3 1 + x3
log(x2 − 1)
x2 − 1
S.2.6
√
2
• sin x + cos x
• cos x
• sin(x) sin(2x)
•
S.2.8
• cos(x ) S.2.11
• sin
1
x
S.2.9
•x cos x − sin x
1
+ sin x
x
√
•x cos2 x − x2 sin2 x • sin x S.2.14
•|x| + arctan x
• arctan
1
• log 1 +
x
•
•x sin
1
x
sin x
x
S.2.14
2
1
S.2.10
•x + sin x
S.2.15
x−1
x+1
x
log x
•
•
4 − x2
x−1
•x sin x
√
• arcsin x
• arcsin x2
x2 − 1
• arcsin tan x
x2 + 1
x
1
• 1+
S.2.17 •xn log x S.2.19
x
• arcsin
•xe x
• log(1 + cos x)
• sin(log x)
•xn e−x
•ex sin x
• log(tan x)
• sin x log(sin x)
•ex log x
x+1
•√
x2 − 2
log(1 + x2 )
•
1 − x2
√
x2 + 2
•
x−1
S.2.7
S.2.18
S.2.20
√
•
x2 − 4
x−1
Per tutte le funzioni precedenti per cui sia possibile, scrivere l’equazione della retta
tangente al grafico della funzione nel punto di ascissa 1.
Si studi la funzione reale f (x) = x3 e−x (risp. f (x) = xe−2x , f (x) = x−e e−x , f (x) =
xe
, f (x) = x2 e−x , f (x) = xe−x , ). In particolare: dominio di definizione, limiti agli
estremi; derivata prima e discutere crescenza e decrescenza; eventuali massimi e minimi
(locali e globali); grafico della funzione (punti con tangente verticale? punti di flesso?).
Determinare una primitiva; calcolare l’integrale della funzione sulla semiretta [0, +∞).
−ex
Idem√per la funzione reale f (x) = x log(x) (risp. f (x) = x2 log(x2 ), f (x) = x log(x2 ),
f (x) = x log(x), f (x) = x log2 (x), f (x) = x2 log(x)). In particolare calcolare l’integrale
della funzione sull’intervallo [0, 1]; calcolare l’area della regione del
√ primo quadrante che giace
sopra f (x) e sotto la funzione y = x (risp. y = x2 , y = x, y = x, y = x, y = x2 ).
APPENDICE A. ADDENDUM
A.2.20
337
Polinomi di Taylor (Mac Laurin):
h(x)
1
x
x2
x3
x4
x5
x6
x7
···
xn
ex
1
1
1
2
1
3!
1
4!
1
5!
1
6!
1
7!
···
1
n!
1
− 7!
···
sin x
cos x
− 12
1
1
5!
1
− 3!
1
1
4!
1
− 6!
x2n
x2n+1
(−1)n
(2n+1)!
(−1)n
(2n)!
···
2n+2
(−1)n 2
(22n+2 −1)
B2n+2
(2n+2)!
tan x
1
1
3
2
15
17
315
···
arctan x
1
− 31
1
5
− 17
···
(−1)n
(2n+1)
arcsin x
1
11
23
31
85
5!! 1
6!! 7
···
(2n−1)!! 1
(2n)!! 2n+1
sinh x
1
1
3!
1
5!
1
7!
···
1
(2n+1)!
cosh x
1
2
1
1
4!
1
6!
1
(2n)!
···
tanh x
1
− 31
2
15
17
− 315
···
22n+2 (22n+2 −1)
B2n+2
(2n+2)!
settanh x
1
1
3
1
5
1
7
···
1
(2n+1)
settsinh x
1
− 12 31
31
85
1
− 5!!
6!! 7
···
(2n−1)!! (−1)n
(2n)!! 2n+1
log(1 + x)
1
− 12
1
3
− 61
1
7
···
(−1)n−1
n
α
6
α
7
···
α
n
− 41
1
5
α
5
(1 + x)α
1
α
α
2
α
3
α
4
(1 ± x)−1
1
∓1
1
∓1
1
∓1
1
∓1
···
(1 − x)−2
1
2
3
4
5
6
7
8
···
n+1
(1 + x)−1/2
1
− 12
3
8
− 5!!
6!!
7!!
8!!
9!!
− 10!!
···
···
···
(−1)n (2n−1)!!
(2n)!!
(1 − x2 )−1/2
1
1
2
3
8
5!!
6!!
···
1
(2n−1)!!
(2n)!!
P Bn n
I numeri Bn (Bernoulli) sono definiti da exx−1 =
n! x .
È divertente osservare le relazioni tra gli sviluppi: per esempio la somma di cosh e sinh
è ex , derivate di sin e sinh sono cos e cosh, si riconosce la derivata di log(1 + x), ecc.
∓1
APPENDICE A. ADDENDUM
338
Calcolare i polinomi di Mc Laurin delle seguenti funzioni (fino ad un ordine ragionevole,
per esempio al terzo coefficiente non nullo):
• sin2 x
•
1+x
1 + x2
• cos3 x
• tan x
•(1 − x)−5
•
1
1 + tan x
1
xex
• log2 (1 + x) • log(1 + ex ) • log x
2
e −1
•
x
tan x
•esin x
•(1 + x)x
•
x
sin x
•ex sin x
• arctan √
•
x ex + 1
·
2 ex − 1
• log(1 − x + x2 ) • log
1
cos x
x
1 − x2
APPENDICE A. ADDENDUM
A.2.21
339
Esempi di integrazione sulla definizione:
Sebbene la definizione di limite delle somme sia spesso inutilizzabile in pratica, in alcuni casi
facili permette il calcolo:
Z
n
n
1X i
1 X
1 n(n + 1)
1
= lim 2
i = lim 2
=
n→∞ n
n→∞ n
n n→∞ n i=1
2
2
i=1
1
xdx = lim
0
oppure
Z
n
1
1X
n→∞ n
i=1
x2 dx = lim
0
2
n
1 X 2
i
1
1 n(n + 1)(2n + 1)
= lim 3
i = lim 3
=
n→∞ n
n→∞ n
n
6
3
i=1
(ma è solo una curiosità).
A.2.22
Esercizi sulle primitive:
Determinare le primitive delle seguenti funzioni:
Z
Z p
Z
√
• x−2 dx
• x 1 − x2 dx •
1 − xdx
Z
•
Z
•
Z
•
Z
•
Z
•
•
•
cos x
√
dx
3
sin x
•
Z
Z
1+x
dx
x2
•
xex dx
•
Z
Z
2
log xdx
Z
Z
log x
dx
x
1
1
sin dx
x2
x
A.2.23
•
Z
•
Z
1
dx
x log x
•
sin x
dx
1 + cos2 x
•
Z
x−1
dx
x+1
•
x2 log xdx
•
log x
dx
x
log(sin x)
dx
tan x
Z
Z
•
Z
2 x
x e dx
•
1
dx
tan x
•
Z
1
dx
1 + ex
•
x sin xdx
•
Z
Z
•
Z
sin(log x)dx
Z
xe
Z
Z
•
√
ex
(2 − x2 )2 dx
•
Z
− 1dx
•
−x2
Z
•
Z
dx
1
dx
1 − cos x
•
Z
•
x2 cos xdx
•
1
dx
sin x cos x
Z
•
e−1/x
dx
x2
•
x cos xdx
•
Z
Z
•
Z
•
Calcoli di aree:
Calcolare le aree delle seguenti regioni del piano cartesiano:
• compresa tra la parabola y = x2 e la retta y = x + 1;
• compresa tra le due parabole 2y = x2 − x e 2y = −x2 + 3x;
2
2
• interna alla curva x9 + y4 = 1;
• compresa tra la parabola y = ax2 e la circonferenza (x − a)2 + y 2 = a2 ;
• settore circolare di angolo θ del cerchio di raggio r;
x log(x − 1)dx
Z
Z
1
dx
cos2 x
•
sin x
dx
ex
•
1
dx
sin x
5
cos xdx
1
(3x + 1)− 2 dx
Z
Z
•
1
dx
1 + e−x
x
dx
cos2 x
2x
dx
1−x
1
dx
sin x cos2 x
2
Z
ex sin xdx
Z
1
dx
1 − cos x
Z
1
dx
1 − sin x
•
•
tan2 xdx
APPENDICE A. ADDENDUM
A.2.24
340
Calcoli di lunghezze:
Per le seguenti curve, determinarne la regolarità, i vettori tangenti, la lunghezza d’arco (tra
gli estremi indicati), eventualmente le espressioni in coordinate cartesiane/polari:
x = a(t − sin t)
x = a cos3 θ
•
t ∈ [0, 2π] (cicloide)
•
θ ∈ [0, 2π] (astroide)
y = a(1 − cos t)
y = a sin3 θ
•ρ = 2a(1 + cos θ) θ ∈ [0, 2π] (cardioide)
•ρ =
•ρ = aθ θ ∈ [0, nπ] (spirale di Archimede)
a
− a cos θ θ ∈ [0, π/2] (cissoide) •ρ = eaθ θ ∈ [0, nπ] (spirale logaritmica)
cos θ
ex + 1
x ∈ [1, 2]
ex − 1
•y = ex x ∈ [0, a]
•y = log
•y = xn x ∈ [0, a]
•y = log x x ∈ [1, a]
•
x = et sin t
y = et cos t
t ∈ [0, π/2]
•
x = a(t − sin t cos t)
y = 4a sin t
t ∈ [0, π]
Se possibile, calcolare anche i baricentri e i momenti d’inerzia rispetto agli assi principali...
A.2.25
Aree generalizzate:
Determinare se le seguenti zone del piano hanno area finita:
• tra l’iperbole x2 − y 2 = r2 e il suo asintoto nel primo quadrante;
• tra il grafico di y = 1/x2 e gli assi coordinati nel primo quadrante;
• tra il grafico di y = log x e gli assi coordinati nel quarto quadrante;
• tra il grafico di y = ex e gli assi coordinati nel secondo quadrante.
• tra il grafico di y = 1/xα (al variare di α ∈ R) e gli assi coordinati nel primo quadrante.
A.2.26
Calcolo di integrali generalizzati:
Attribuire i numeri 21 , 1, 2,
Z
+∞
e−3x dx
•
Z
•
0
Z
3
√
0
+∞
•
−∞
ex
dx
1 + e2x
A.2.27
Z
•
1
+∞
π π
8, 2,
2, 1, −1,
Z
1
dx
3−x
•
x
dx
1 + x4
•
π
2,
1
√
0
Z
√
2 3, 13 . ai seguenti integrali generalizzati:
1
dx
1 − x2
Z
−∞
Z
log xdx
Z
•
0
+∞
•
0
0
x2 ex dx
1
•
0
1
1
log dx
x
Z
•
+∞
1
dx
(1 + x)2
2
xe−x dx
0
Esercizi di rotazione:
Risolvere i seguenti problemi:
• Determinare volume e superficie dell’ellissoide di semiassi a, b, c;
• Determinare volume e superfice del toro (solido generato dalla rotazione di un cerchio
di raggio r attorno ad una retta del suo piano avente distanza R > r dal suo centro);
• Determinare volume e superficie del solido limitato dal paraboloide z = a2 x2 + b2 y 2 e
il piano z = k;
• Determinare superficie della finestra di Viviani, e il volume corrispondente della sfera (la
finestra in questione è tagliata sulla sfera di centro origine e raggio r dal cilindro x2 +y 2 = rx:
farsi un disegno);
• Determinare superficie e volume descritti dalla rotazione di 0 6 y 6 sin x attorno
all’asse delle ordinate, con x ∈ [0, π].
Z
•
0
•
1
1
√ dx
x
APPENDICE A. ADDENDUM
A.2.28
341
Regole di Derivazione/Integrazione
h(x) =
d
dx H(x)
= H 0 (x)
Z
H(x) =
h(x)dx
linearità:
αf (x) + βg(x)
αF (x) + βG(x)
catena:
f 0 (g(x))g 0 (x) = (f 0 ◦ g)(x)g 0 (x) f (g(x)) = (f ◦ g)(x)
Z
sostituzione:
f (x)
prodotto:
f 0 (x)g(x) + f (x)g 0 (x)
f (φ(t))φ0 (t)dt [t = φ−1 (x)]
f (x)g(x)
Z
0
f (x)g(x) −
parti:
f (x)g(x)
inv.molt.:
−
quoziente:
(f 0 (x)g(x) − f (x)g 0 (x))
g(x)2
f (x)
g(x)
parti:
f 0 (x)
g(x)
f (x)
+
g(x)
inv.comp.:
f 0 (x)
f (x)2
1
f 0 (f −1 (x))
f (x)g 0 (x)dx
1
f (x)
=
1
(f 0 ◦ f −1 )(x)
f −1 (x)
f (x)g 0 (x)
dx
g(x)2
Z
h
i
(f ◦ f −1 )(x) = x = (f −1 ◦ f )(x)
APPENDICE A. ADDENDUM
A.2.29
342
Sostituzioni notevoli:
Z
Z
R(cos θ, sin θ)dθ =
R
2
dt
1 + t2
θ
[t = tan ]
2
Z
2t
2
1 + t2
θ
,
R(cosh θ, sinh θ)dθ = R
dt [t = tanh ]
2
2
2
1−t 1−t
t −1
2
2
Z
y + 1 y2 − 1 1
= R
,
dy
[y = eθ ]
2y
2y
y
Z
Z
R(ex )dx =
Z
R(t)
dt
t
Z
Z
f (x, y(x))dx =
Z
f
[t = ex ]
f (φ(t), ψ(t))φ0 (t)dt
[(x, y(x)) = (φ(t), ψ(t))]
r
Z m
αδ − βγ
αx + β
δt − β
,
t
mtm−1 dt
x, m
dx = f
m
γx + δ
α − γt
(α − γtm )2
[tm =
A.2.30
1 − t2
2t
,
1 + t2 1 + t2
αx+β
γx+δ ;
x=
δtm −β
α−γtm
: αδ − βγ 6= 0]
Regole di derivazione e differenziazione a confronto:
df
Legendre-Newton: f 0 = f˙ Leibniz:
dx
differenziali: df = f 0 dx =
(f + g)0 = f 0 + g 0
df
dg
d(f + g)
=
+
dx
dx dx
d(f + g) = df + dg
(αf )0 = αf 0
df
d(αf )
=α
dx
dx
d(αf ) = αdf
(f g)0 = f 0 g + f g 0
d(f g)
df
dg
=
g+f
dx
dx
dx
d(f g) = d(f )g + f d(g)
d(1/f )
1 df
=− 2
dx
f dx
d(1/f ) = −
f 0 g − f g0
g2
d(f /g)
(df /dx)g − f (dg/dx)
=
dx
g2
d(f /g) =
(f ◦ g)0 = (f 0 ◦ g)g 0
d(f ◦ g)
df
dg
df dg
=(
◦ g)
=
dy
dx
dy
dg dy
d(f ◦ g) = d(f ) ◦ d(g)
d(f −1 )
1
=
dy
(df /dx) ◦ f −1
d(f −1 ) = d(f )−1
d(log f )
1 df
=
dx
f dx
d(log f ) =
(1/f )0 = −
(f /g)0 =
(f −1 )0 =
(log f )0 =
f0
f2
1
0
f ◦ f −1
f0
f
1
df
f2
d(f )g − f d(g)
g2
df
f
Le regole di composizione giustificano anche la “formula” dy/dx = 1/(dx/dy).
df
dx
dx
APPENDICE A. ADDENDUM
A.2.31
343
Tavole di Derivazione/Integrazione
h(x) =
d
dx H(x)
= H 0 (x)
Z
H(x) =
h(x)dx
u0 (x)u(x)α
1
u(x)α+1
α+1
u0 (x)eu(x)
eu(x)
2u0 (x)
1 − u(x)2
1 + u(x) log 1 − u(x) u0 (x) cos u(x)
sin u(x)
−u0 (x) sin u(x)
cos u(x)
u0 (x)
= u0 (x)(1 + tan2 u(x))
cos2 u(x)
tan u(x)
−
u0 (x)
= −u0 (x)(1 + cotan2 u(x))
sin2 u(x)
cotan u(x)
u0 (x) cosh u(x)
sinh u(x) = 21 (eu(x) − e−u(x) )
u0 (x) sinh u(x)
cosh u(x) = 21 (eu(x) + e−u(x) )
u0 (x)
= u0 (x)(1 − tanh2 u(x))
cosh2 u(x)
tanh u(x) =
−
u0 (x)
cosh u(x)
= u0 (x)(1 − cotanh2 u(x)) cotanh u(x) =
2
sinh u(x)
sinh u(x)
u0 (x)
p
1 − u(x)2
arcsin u(x)
u0 (x)
−p
1 − u(x)2
arccos u(x)
u0 (x)
1 + u(x)2
arctan u(x)
−
sinh u(x)
cosh u(x)
u0 (x)
1 + u(x)2
u0 (x)
p
1 + u(x)2
u0 (x)
p
u(x)2 − 1
u0 (x)
u(x)2 − 1
u0 (x)
u(x)2 − 1
arcotan u(x)
settsinh u(x) = log(u(x) +
p
settcosh u(x) = log(u(x) +
p
s
u(x)2 + 1)
u(x)2 − 1)
1 + u(x)
1 − u(x)
s
u(x) + 1
settcotanh u(x) = log
u(x) − 1
settanh u(x) = log
APPENDICE A. ADDENDUM
A.2.32
344
Integrazione di funzioni razionali:
Si usa la decomposizione in frazioni semplici
fj
e
i
XX
XX
ai,e
bj,f x + cj,f
P (x)
Q
=
+
f
2
e
e
2
j
i
(x − αi )
(x + βj x + γj )f
j (x + βj x + γj )
i (x − αi )
i e=1
j
Q
f =1
(ogni numeratore ha grado inferiore alla base del proprio denominatore, denominatori di
secondo grado senza radici reali: x2 + βj x + γj = (x − aj )2 + b2j ).
Poi si integrano gli addendi separatamente:
Z
1
− 1
1
n−1
n
−
1
x
dx =
log |x|
xn
n>1
1
1
x
2(n − 1) (1 + x2 )n−1
dx =
1
(1 + x2 )n
log(1 + x2 )
2
Z
1
dx
In =
(1 + x2 )n
I1 = arctan x
In =
1
dx =
(x − α)n
Z
x
dx =
((x − a)2 + b2 )n
n=1
−
Z
Z
1
x
2n − 3
+
In−1
2(n − 1) (1 + x2 )n−1
2n − 2
n>1
n=1
Z
In (a, b) =
1
dx
((x − a)2 + b2 )n
I1 (a, b) =
In (a, b) =
Dunque ogni integrale di funzione razionale si scrive come combinazione lineare di funzioni
razionali, log(x2 + βx + γ) e arctan(x2 + βx + γ).
Esempi di decomposizione in frazioni semplici:
2
x+1
=1+
x−1
x−1
2
x+1
1
+
=
2
(x − 1)
x − 1 (x − 1)2
x+1
1
x
= 2
+
x2 + 1
x + 1 x2 + 1
x2 − x
1
1+x
= 2
−
(x2 + 1)2
x + 1 (x2 + 1)2
APPENDICE A. ADDENDUM
A.2.33
345
Tavole di Derivazione/Integrazione Elementari
Esponenziali, logaritmi, potenze, frazioni.
Z
df
(x)
dx
f (x)
ex
ex
ex
1/x
log x
x(log x − 1)
α−1
αx
x
f (x)dx
α
1
α+1
α+1 x
log x
α 6= −1
α = −1
xα ex
xα−1 (α log x + 1)
xα log x
α+1
x 2 ((α + 1) log x − 1) α 6= −1
(α+1)
1 log2 x
α = −1
2
2
2
2
e−x (1 − 2x2 )
xe−x
(αx2 + 2x)eαx
x2 eαx
eαx (x2 /α − 2x/α2 + 2/α3 )
sgn(x)
|x|
sgn(x)x2 /2
1
a 2 − x2
x + a
1
log 2a
x − a
a2
1
+ x2
x
ax + b
x
(ax + b)2
√
1/(1 − x) 1 − x2
r
1+x
1−x
−e−x /2
x
1
arctan
a
a
x
b
+ 2 log |ax + b|
a a
b
1
+
log
|ax
+
b|
a2 ax + b
arcsin(x) −
√
1 − x2
S.2.23
APPENDICE A. ADDENDUM
346
Trigonometria circolare.
Z
df
(x)
dx
f (x)
cos x
sin x
− cos x
− sin x
cos x
sin x
1/ cos2 x = 1 + tan2 x
tan x
− log | cos x|
f (x)dx
−1/ sin2 x = −(1 + cotan2 x) cotan x
log | sin x|
sin x/ cos2 x
1/ cos x
x
settanh(sin x) = log | 1+sin
cos x | S.2.31
− cos x/ sin2 x
1/ sin x
sin x
− settanh(cos x) = log | 1+cos
x|
−2 sin x cos x
cos2 x
1
2 (x
+ sin x cos x)
2 sin x cos x
sin2 x
1
2 (x
− sin x cos x)
tan2 x
tan x − x
2 sin x/ cos3 x
1/ cos2 x
tan x
−2 cos x/ sin3 x
1/ sin2 x
− cotan x
1/(1 ± cos x)
cotan x ± 1/ sin x
1/(1 ± sin x)
tan x ∓ 1/ cos x
√
1/ 1 − x2
arcsin x
x arcsin x +
√
−1/ 1 − x2
arccos x
x arccos x −
1/(1 + x2 )
arctan x
x arctan x + log
−1/(1 + x2 )
arcotan x
x arcotan x + log
2 sin x cos x/(a2 + cos2 x)2
1/(a2 + cos2 x)
√1
a 1+a2
arctan
−2 sin x cos x/(a2 + cos2 x)2
1/(a2 + sin2 x)
√1
a 1+a2
arcotan
√
S.2.32
1 − x2
√
S.2.33
1 − x2
√
1 + x2
√
1 + x2
√ a
1+a2
tan x S.2.34
√ a
1+a2
cotan x
APPENDICE A. ADDENDUM
347
Trigonometria iperbolica.
Z
df
(x)
dx
f (x)
cosh x
sinh x = (ex − e−x )/2
cosh x
sinh x
cosh x = (ex + e−x )/2
sinh x
1/ cosh2 x = 1 − tanh2 x
tanh x =
f (x)dx
ex − e−x
ex + e−x
−1/ sinh2 x = −1 − cotanh2 x cotanh x =
log | cosh x|
ex + e−x
ex − e−x
log | sinh x|
− sinh x/ cosh2 x
1/ cosh x
arctan(sinh x)
− cosh x/ sinh2 x
1/ sinh x
sinh x
− settanh(cosh x) = log | 1+cosh
x|
2 sinh x cosh x
cosh2 x
1
2 (x
2 sinh x cosh x
sinh2 x
1
2 (−x
2 sinh x/ cosh3 x
1/ cosh2 x
tanh x
2 cosh x/ sinh3 x
1/ sinh2 x
− cotanh x
1/(1 ± cosh x)
cotanh x ∓ 1/ sinh x
1/(1 ± sinh x)
√
1/ 1 + x2
settsinh x = log(x +
√
1/ x2 − 1
settcosh x = log(x +
√
x2 + 1)
√
x2 − 1)
S.2.35
+ sinh x cosh x)
+ sinh x cosh x)
√
ex ± (1 − 2)
1
√ log
√
2
ex ± (1 + 2)
√
x settsinh x − 1 + x2
x settcosh x −
√
S.2.36
S.2.37
S.2.38
x2 − 1
r
2
1/(1 − x )
1/(1 − x2 )
1+x
1−x
r
x+1
settcotanh x = log
x−1
settanh x = log
1/(a2 + cosh2 x)
1/(a2 + sinh2 x)
1
− a√1+a
settanh
2
√ a
1+a2
tanh x S.2.39
APPENDICE A. ADDENDUM
348
Miscellanea.
df
(x) f (x)
dx
eαx cos(βx)
eαx sin(βx)
Z
f (x)dx
eαx
(α cos(βx) + β sin(βx))S.2.40
α2 + β 2
eαx
(α sin(βx) − β cos(βx))
+ β2
α2
sin(log x)
x(sin(log x) − cos(log x))/2
cos(log x)
x(sin(log x) + cos(log x))/2
x cos x
x sin x + cos x
x sin x
−x cos x + sin x
eαx cosh(βx)
S.2.41
eαx
(α cosh(βx) − β sinh(βx))
+ β2
α2
eαx sinh(βx)
eαx
(α sinh(βx) − β cosh(βx))
α2 + β 2
sinh(log x)
x(sinh(log x) − cosh(log x))/2
cosh(log x)
x(cosh(log x) − sinh(log x))/2
x cosh x
x sinh x + cosh x
x sinh x
x cosh x + sinh x
APPENDICE A. ADDENDUM
349
Un po’ di radici.
Z
df
(x)
dx
f (x)
√
−x/ a2 − x2
√
√
x/ a2 + x2
√
√
x/ x2 − a2
√
f (x)dx
1
2 (x
a2 + x2
1
2 (x
x2 − a2
1
2 (x
1
x2 ± a2
log |x +
√
√
√
√
√
a2
1
− x2
√
x2 − a2
x
√
a 2 − x2
x
√
√
x x2 + a2
√
1
x2
−
a2
1
√
x a 2 − x2
√
x2 ± a2
x2
√
a 2 − x2
x2
√
x2
x2 ± a2
x2
a 2 − x2
p
x2 x2 ± a 2
√
x2
p
a2 − x2
1
√
2
x x2 ± a2
1
√
2
x a2 − x2
√
√
a2 − x2 + a2 arcsin(x/a))
S.2.24
a2 + x2 + a2 settsinh(x/a))
x2 − a2 + a2 settcosh(x/a))
arcsin
x2 + a2
x
1
x
√
a2 − x2
√
x2 ± a2 | =
settsinh
settcosh
x
a
S.2.25
x
a
x2 + a2 − a log
a+
x2 − a2 − a arcsec
√
x2 + a2
|x|
!
x
a
a + √a2 − x2 a2 − x2 − a log x
S.2.26
S.2.27
a + √ x2 + a 2 1
− log a
x
1
a
arcsec
− a1
|x|
a
a + √a2 − x2 log x
√
−
√
−
S.2.28
S.2.29
p
x2 ± a 2
+ log |x + x2 ± a2 |
x
a2 − x2
x
− arcsin
x
a
1
2
√
√
x x2 ± a2 ∓ a2 log |x + x2 ± a2 |
1
2
√
−x a2 − x2 + a2 arcsin xa
1
8
√
√
(2x2 ± a2 ) x2 ± a2 − a4 log |x + x2 ± a2 |
1
8
√
(2x2 − a2 ) a2 − x2 + a4 arcsin xa
√
∓
√
−
x2 ± a 2
a2 x
a2 − x2
a2 x
S.2.30
APPENDICE A. ADDENDUM
350
Ancora radici. S.2.42
df
(x)
dx
Z
f (x)
√
ax + b
√
x ax + b
√
ax + b
x
f (x)dx
2
3a (ax
+ b)3/2
2
15a2 (3ax
√
R
2 ax + b + b
√
√
1
ax + b
2
a
√
x
ax + b
2
3a2 (ax
1
x ax + b
√
√
2ax − x2
√
x 2ax − x2
√
− 2b)(ax + b)3/2
√dx
x ax+b
ax + b
√
− 2b) ax + b
√
√ √b log √ax+b−
ax+b+ b
q
ax+b
√1 arctan
−b
−b
1
√
b
x−a
2
√
2ax − x2 +
(x+a)(2x−3a) √
2ax
6
a2
2
[b > 0]
[b < 0]
arcsin x−a
a
− x2 +
a3
2
2ax − x2
x
√
√
1
2ax − x2
arcsin x−a
a
√
x
2ax − x2
√
− 2ax − x2 + a arcsin x−a
a
1
x 2ax − x2
√
2ax − x2 + a arcsin x−a
a
− a1
q
2a−x
x
arcsin x−a
a
APPENDICE A. ADDENDUM
A.2.34
351
Funzioni non elementarmente integrabili
Z
df
(x)
dx
−2xe−x
f (x)
2
x cos x − sin x
x2
e−x
f (x)dx
2
erf x
sin x
x
Si x
ex
x
Ei x = Li (ex )
1
log x
Li x = Ei (log x)
−2x sin(x2 )
cos(x2 )
C(x)
2x cos(x2 )
sin(x2 )
S(x)
R(x,
R(x,
p
√
√
1 + x3 )
1 + x4 )
r
1−
k2
2
sin θ
1
p
2
1 − k 2 sin θ
,
,
1 − k 2 x2
1 − x2
1
p
(1 −
x2 )(1
− k 2 x2 )
APPENDICE A. ADDENDUM
A.2.35
352
Esercizi sulle equazioni differenziali:
F Risolvere le seguenti equazioni differenziali (prim’ordine a variabili separabili), ed
eventualmente il problema di Cauchy indicato tra parentesi quadre:
•y 0 = xy
• tan(x)y 0 = (y − 1)
[y(−1) = −3]
•(x2 − 4)y 0 = 1 + 2y
[y(0) = −1]
•x(x − 1)y 0 = y(y − 1)
[y(2) = 3]
[y(−1) = 1]
•y 2 y 0 = x3
√
•yy 0 x2 + 1 = x [y(0) = −1]
√
•y 0 = ex/2 y + 1
•(x − 1)y 0 = xy
•yy 0 = ex+2y sin(x)
F Risolvere le seguenti equazioni “omogenee” (significa che si scrivono nella forma y 0 =
f (y/x), cioè y 0 = φ(x, y) con φ(tx, ty) = φ(x, y)), seguendo il seguente suggerimento: usando
z = y/x, cioè y = xz (dunque y 0 = xz 0 + z) si ottiene una equazione a variabili separabili in
z...
y
y
y
x+y
•y 0 = 1 +
•y 0 = + sin
•y 0 =
x
x
x
x−y
r
y
y
x+y
2xy
•y 0 = ey/x +
•y 0 = +
•y 0 = 2
x
x
x
x − y2
F Risolvere le seguenti equazioni differenziali lineari (prim’ordine), ed eventualmente il
problema di Cauchy indicato tra parentesi quadre:
•y 0 + 5x2 y = 3x2
•y 0 =
y
+ log x
x
[y(2) = 1] •y 0 = 2
[y 0 (1) = 1]
y
x−2 x
+
e
x
x
•y 0 = y log(x) + xx
[y(−1) = 1]
•y 0 = 6y + 10ex
[y(0) = 2/3]
•y 0 = y sin(x) + ex−cos x
F Risolvere le seguenti equazioni differenziali lineari a coefficienti costanti (second’ordine):
•y 00 − 4y = e2x
•y 00 − 2y 0 + y = x + 2xex
•y 00 + y 0 − 2y = ex
•y 00 + y = sin x
•y 00 + 4y = 3x sin x
•y 00 − 3y 0 = 2e2x sin x
APPENDICE A. ADDENDUM
A.2.36
353
Problemi sulle equazioni differenziali:
Recipienti. Un recipiente di capacità CM contiene una quantità C0 < CM di liquido,
vi viene immesso lo stesso tipo di liquido con portata pi , ed è soggetto ad una perdita
proporzionale secondo il coefficiente po alla quantità di liquido presente. Determinare la
quantità di liquido al variare del tempo, chiamando C(t) la funzione, e descrivere sotto quali
condizioni e in quali tempi il contenitore si svuota o tracima.
Il problema è più semplice se il prelievo di liquido viene fatto con portata po costante
(indipendente dalla quantità di liquido)?
Cosa succede se l’immissione di liquido viene fatta secondo il coefficiente pi proporzionalmente alla quantità di liquido mancante al recipiente? Dove si usa un tale meccanismo,
possibilmente con po = 0?
Pentole.
Una pentola d’acqua viene riscaldata in un ambiente a temperatura Ta .
Tenendo conto che la fonte di calore è a temperatura Tf > Ta , e supponendo che la variazione
di temperatura sia proporzionale alla differenza tra le temperature (pentola-fonte e pentolaambiente secondo due fattori pf e pa ), determinare la temperatura T (t) della pentola in
funzione del tempo. Cosa succcede per tempi lunghi?
Decadimenti. Una sostanza radioattiva decade con un tasso proporzionale alla sua
massa radioattiva; se T0 è il tempo di dimezzamento, determinare la funzione R(t) di sostanza
radioattiva al variare del tempo, sapendo che il valore iniziale è R0 ; trovare i tempi per
ottenere un valore inferiore a R0 /n (n intero positivo).
Popolazioni. L’evoluzione nel tempo della numerosità di una popolazione X(t) dipende
dal bilancio k(t) tra natalità e mortalità (eventualmente costante nel tempo), può dipendere
da fattori ambientali (disponibilità di risorse per massima numerosità M ): interpretare e
confrontare i modelli di evoluzione seguenti:
•X 0 = kX
• X 0 = k(t)X
• X 0 = kX(M − X)
• X 0 = k(t)X(M − X)
(si tratta comunque di popolazioni isolate; come fare per tener conto di eventuali emigrazioni/immigrazioni?)
Diluizioni. Da un recipiente di acqua salata con capacità iniziale C0 e percentuale
iniziale di sale p0 , viene prelevata acqua in quantità proporzionle tramite vo al liquido presente, e viene aggiunta acqua salata, con percentuale di sale pi , con portata vi . Determinare
come varia la percentuale di sale nella soluzione in funzione del tempo. Se pi < p0 , dopo
quanto tempo la quantità di sale in soluzione sarà dimezzata (in percentuale)? Cosa succede
se pi = 0?
Il problema si semplifica se il prelievo viene fatto con portata vo indipendente dalla
quantità di liquido presente?
Un dison-oste serve vino da un recipiente in cui inserisce una parte di acqua ogni tre
parti di liquido servito. Sapendo che all’inizio è tutto vino, determinare la funzione che dà
la percentuale di vino nel recipiente al variare del tempo.
Interessi, ovvero usura. Omissis.
Cadute. Un oggetto cadendo in un fluido è soggetto alla forza di gravità proporzionalmente (secondo g) alla propria massa m, e ad un attrito viscoso proporzionale (secondo
r) alla propria velocità (risp. al quadrato della propria velocità). Determinare le funzioni
accelerazione, velocità e spazio percorso in funzione del tempo.
Oscillazioni. Scrivere e studiare le soluzioni delle seguenti equazioni differenziali:
APPENDICE A. ADDENDUM
354
• oscillazioni libere: y 00 + ω 2 y = 0 (moto armonico);
• oscillazioni smorzate: y 00 + 2δy + ω 2 y = 0 (δ positivo, moto armonico smorzato);
• oscillazioni forzate: y 00 +2δy +ω 2 y = f (t) (δ positivo, moto armonico smorzato e forzato
da f (t)), in particolare vedere f (t) = B cos(γt).
Traiettorie ortogonali. Si consideri la famiglia di circonferenze passanti per l’origine
e di centro sull’asse delle ascisse (farsi un disegno): equazioni x2 + y 2 − 2cx = 0, se c è
y 2 − x2
(si
l’ascissa del centro. Mostrare che esse soddisfano all’equazione differenziale y 0 =
2xy
noti l’indipendenza da c...). Determinare le equazioni delle curve del piano che tagliano tutte
quelle circonferenze ortogonalmente nei punti di intersezione (significa che le rette tangenti
devono essere ortogonali). Suggerimento: derivare l’equazione rispetto a x, e poi eliminare
la c ricavandola dalle equazioni date. Trovata l’espressione y 0 = qlc, impostare e risolvere
l’equazione differenziale y 0 = −1/qlc (coefficiente angolare della retta ortogonale).
Stesso problema (trovare la famiglia di curve ortogonali) per: la famiglia di parabole
y = ax2 , la famiglia di iperboli xy = a, la famiglia di rette y = ax, la famiglia di cubiche
y = ax3 , ... (è simpatico farsi i disegni: vedi S.2.43).
APPENDICE A. ADDENDUM
A.3
A.3.1
355
Geometria Lineare
Dimensione di sottospazi:
Si possono verificare questi fatti:
• ogni insieme indipendente di vettori di un sottospazio può essere completato a una
base del sottospazio aggiungendo dei vettori (e volendo, scelti tra un insieme di generatori)
di quel sottospazio;
• dato un insieme S di generatori, e un insieme L indipendente di vettori di un dato
sottospazio, allora il numero di elementi di L è minore del numero di elementi di S; questo
è impegnativo: si fa dimostrando che possiamo sostituire i vettori di S con vettori di L
rimanendo l’insieme generatore, ed esaurendo l’insieme L;
• si conclude allora che insiemi massimali indipendenti, insiemi minimali generatori e basi
sono equivalenti, e ogni tale insieme ha sempre lo stesso numero di elementi.
A.3.2
Alcuni sottinsiemi notevoli del piano:
5
4 Nel piano R2 consideriamo i vettori v = 12 e w = −1
1 .
(a) mostrare che ogni vettore x = xx12 del piano si scrive in modo unico come combinazione lineare x = αv + βw (determinare α e β in funzione di x1 ed x2 );
(b) disegnare e caratterizzare (tramite equazioni o disequazioni) i sottoinsiemi di R2
formati dagli estremi finali dei vettori del tipo αv + βw ove α e β sono numeri reali soggetti
alle seguenti condizioni:
(C) α, β ∈ [0, ∞)
(R) α + β = 1
(S) α + β = 1 con α, β ∈ [0, 1]
(P ) α, β ∈ [0, 1]
(T ) α + β 6 1 con α, β ∈ [0, 1]
(X) α + β 6 1
(c) specificare le relazioni di inclusione tra gli insiemi precedenti.
−1 1
5
4 Nello spazio R3 consideriamo i vettori v = 2 e w = −1 .
0
2
x1 x
(a) mostrare che un vettore x = x2 appartiene al piano generato da v e w se e solo se
3
vale la relazione 4x1 − 2x2 + x3 = 0;
(b) descrivere i sottoinsiemi analoghi a quelli dell’esercizio precedente.
A.3.3
Alcuni sottinsiemi notevoli dello spazio
5
4 Nello spazio R3 consideriamo i vettori u =
1
0
1
v=
1
2
0
ew=
−1 1
2
.
(a) verificare che sono linearmente
x1 indipendenti e risolvere in α, β, γ la relazione x =
x2
generico;
x
αu + βv + γw per un vettore x =
3
(b) disegnare e caratterizzare (tramite equazioni o disequazioni) i sottoinsiemi di R3
formati dagli estremi finali dei vettori del tipo αu + βv + γw ove α, β e γ sono numeri reali
soggetti alle seguenti condizioni:
(C) α, β, γ ∈ [0, ∞)
(P i) α + β + γ = 1
(T r) α + β + γ = 1 con α, β, γ ∈ [0, 1]
(P a) α, β, γ ∈ [0, 1]
(T e) α + β + γ 6 1 con α, β, γ ∈ [0, 1]
(X) α + β + γ 6 1
(c) specificare le relazioni di inclusione tra gli insiemi precedenti.
APPENDICE A. ADDENDUM
A.3.4
356
Esercizi sulle matrici:
♣ Determinare quali delle seguenti matrici sono tra loro moltiplicabili, ed eseguire le
moltiplicazioni possibili:
1
1 2
1 2 3
1 2 3 4
2 ,
23 ,
234 ,
2345 .
( 12 ) , ( 1 2 3 ) , ( 1 2 ) ,
( 12 23 34 ) , ( 12 23 ) ,
3
34
345
3456
♣ Si trovino degli esempi di matrici A, B quadrate (di ordine 2 o 3, diciamo) tali che AB =
0 (matrice nulla) e BA 6= 0 (ragionare anche in termini delle funzioni lineari corrispondenti,
e delle loro composizioni).
Si trovino esempi di matrici rettangolari moltiplicabili tali che AB = 1 (matrice identica
del giusto ordine) e BA 6= 1 (matrice nulla); è possibile che BA = 1 se le matrici non sono
quadrate?
Si trovino esempi di matrici A e B con A non identica e B non nulla tali che AB = B
(la matrice B è necessariamente quadrata? e la matrice A?).
Trovare degli esempi di matrici quadrate non nulle con quadrato nullo: A 6= 0 e A2 = 0.
Trovare almeno due esempi di matrici quadrate non identiche con quadrato identico: A 6= 1
e A2 = 1. Trovare almeno due esempi di matrici quadrate non identiche e non nulle con
quadrato uguale alla matrice stessa: A 6= 0, 1 e A2 = A.
2s+t s
s−t
2
4
♣ Si consideri la funzione f di R in R definita da f t =
. Si mostri che f
s+t
s+2t
è lineare e si scriva la matrice corrispondente (basi canoniche); si determini ker(f ); si trovi
una base di im(f ).
r r+2s+t Idem per la funzione f di R3 in R3 definita da f s = r−s−t .
t
s+t
r r+s+t Idem per f s = r−s−t .
t
s+t
r
♣ Si consideri la funzione f di R3 in R2 definita da f s = r+s+t
2r−s . Si mostri che f è
t
lineare e si scriva la matrice corrispondente (basi canoniche). Si mostri che f è suriettivo; si
determini ker(f ).
r+s
Idem per la funzione f di R2 in R2 definito da f ( rs ) = 2r−s
.
♣ Scrivere le proiezioni su U nella
direzione
di
W
,
e
di
W
nella direzione di U per i
11
1
3
0 i e W = h 1 i. Idem per le simmetrie.
seguenti due sottospazi di R : U = h 1
0
1
1
♣ Scrivere proiezioni e simmetrie ortogonali su U e su W (dell’esercizio precedente).
APPENDICE A. ADDENDUM
A.3.5
357
Esercizi sui determinanti:
♣ Procedendo per induzione sull’ordine della matrice, ed usando operazioni
1 elementari
1 ··· 1
x0 x1
x21
···
··· ···
k
xk
0 x1
x20
sulle righe nel passo induttivo, calcolare il determinante di Vandermonde: det ···
Q
···
···
···
···
···
xk
x2k
···
···
xk
k
=
− xj ) .
♣ Sia A ∈ M(2n+1)×(2n+1) (R) tale che A = −At . Mostrare che det A = 0 (matrici!an 0 a b c −a 0 d e tisimmetriche d’ordine dispari hanno determinante nullo). Mostrare che −b −d 0 f =
−c −e −f 0 i>j (xi
(af + be − cd)2 .
♣ Sia X = ( A0 B
C ) una matrice a blocchi, ove A ∈ Mr×r (R) e C ∈ Ms×s (R). Si mostri
¯
¯
che det(X) = det(A) det(C),
usando
sia la tecnica di riduzione di Gauss.
sia la definizione,
1 a b+c
1 1
1
♣ Mostrare che det 1 b a+c = 0, che det 1 1+x 1
= xy e generalizzare.
1 c a+b
A.3.6
1
1
1+y
Esercizi sui sistemi lineari:
5 −3
♣ Risolvere i sistemi lineari A` x = b` (` ∈ R) di matrice completa
¯
5 132
4 6 354
.
4 14 1 7 4
2 4
4 −2 3 7
8 −6 −1 −5
7 −3 7 17
3
1
9
`
e
2
2 −3 3 ` 7
♣ Sia dato il sistema lineare reale Σk : Ak x = bk di matrice completa Ck =
0 2k k2 −1 0
k −1 −k −1
1 −k 1
k
al variare di k ∈ R. Determinare per quali valori di k Σk ammette un’unica soluzione e, in
questi casi, determinare
la soluzione di Σk . Risolvere lo stesso problema su C.
♣ Sia A =
1
1
0
1
3
4
1
2
5
7
2
3
3
3
0
2
. Si discuta il sistema AX = b al variare di b in R4 ; in particolare
si mostri che i b per i quali il sistema ammette soluzione, sono tutte e sole le soluzioni di
un’equazione lineare omogenea.
6 −2 −3 2 2 3
1 −1 0
♣ Si calcolino le inverse delle seguenti matrici: A = −2 1 1 , B =
e
−1 2 1
−1 0 1
1 a a2 a3 C = 00 10 a1 aa2 .
0 0 0
1
♣ Un quadrato magico è una matrice quadrata, con termini interi positivi o nulli, tale
che le somme dei termini su ogni riga, su ogni colonna e sulle due diagonali coincidano tutte.
Determinare tutti i quadrati magici d’ordine 2 (sono solo quelli banali, con tutte le entrate
uguali) e 3 (mostrare in particolare che il termine centrale della matrice è necessariamente
un terzo della somma).
APPENDICE A. ADDENDUM
A.3.7
Condizioni matriciali per sottospazi:
♣ Piano affine: condizioni matriciali. Siano Pi =
vi = mlii ∈ R2 vettori.
−x
0
• Tre punti P0 , P1 , P2 sono allineati se e solo se xy1 −y
1
X
Y
358
xi
yi
∈ R2 punti del piano affine e
=0 ovvero x10 x11 x12 =0 .
1
0
y0 y1 y2
X−x0 x1 −x0 • retta per due punti: P0 +hP1 −P0 i; equazione cartesiana: Y −y0 y1 −y0 =0 ovvero
1 1 x0 x1 =0.
y0 y1
1 1 0 X x l 0 l0 0
0 =0.
• retta per un punto e direzione un vettore: P0 +hv0 i; X−x
Y −y0 m0 =0 ovvero x2 −x0
y2 −y0
Y y0 m0
• Date le equazioni cartesiane di tre rette, scrivere una condizione matriciale per riconoscere se o no stanno in un fascio.
xi ♣ Spazio Affine: condizioni matriciali. Siano Pi = yzi ∈R3 punti dello spazio e
i
l i
vi = mi ∈R3 vettori.
ni
x1 −x0 x2 −x0 x3 −x0 • quattro punti P0 , P1 , P2 , P3 sono complanari se e solo se y1 −y0 y2 −y0 y3 −y0 =0, cioè
z1 −z0 z2 −z0 z3 −z0
1 1 1 1
x x x x y0 y1 y2 y3 =0 .
z0 z1 z2 z3 0
1
2
3
1 1 1
x1 −x0 x2 −x0 • condizione di allineamento di tre punti: rk y1 −y0 y2 −y0 =1, cioè rk xy00 xy11 xy22 =2 .
z1 −z0 z2 −z0
z0 z1 z2
X−x0 x1 −x0 x2 −x0 • piano per tre punti non allineati: P0 +hP1 −P0 , P2 −P0 i; Y −y0 y1 −y0 y2 −y0 =0, cioè
Z−z0 z1 −z0 z2 −z0
1 1 1 1
X x0 x1 x2 Y y0 y1 y2 =0.
Z z0 z1 z2 X−x0 l0 l1 • piano per un punto e direz. due vettori lin.ind.: P0 +hv0 , v1 i; Y −y0 m0 m1 =0, cioè
Z−z0 n0 n1
1 1 0 0 X x0 l0 l1 Y y0 m0 m1 =0.
Z z0 n0 n1 X−x0 x1 −x0
• retta per due punti distinti: P0 +hP1 −P0 i; condizione: rk Y −y0 y1 −y0 =1, ovvero
Z−z0 z1 −z0
!
rk
1
X
Y
Z
1
x0
y0
z0
1
x1
y1
z1
=2.
• retta per un punto e di direzione un vettore: P0 +hv0 i; rk
!
rk
1
X
Y
Z
1
x0
y0
z0
0
l0
m0
n0
X−x0 l0
Y −y0 m0
Z−z0 n0
=1 ovvero
=2.
• Date le equazioni cartesiane di tre (risp. quattro) piani, scrivere una condizione
matriciale per riconoscere se o no stanno in un fascio (risp. in una stella).
APPENDICE A. ADDENDUM
A.3.8
359
Posizioni reciproche per sottospazi affini:
Due sottospazi affini si dicono incidenti se la loro intersezione non è vuota, non incidenti
altrimenti.
Si dicono paralleli se uno degli spazi direttori contiene l’altro. Si noti che cosı̀ un punto
(spazio direttore nullo) è parallelo a qualsiasi sottospazio, anche se non si dice. Due sotto
spazi della stessa dimensione sono paralleli se e solo se hanno uguale spazio direttore. Se
due sottospazi sono paralleli e incidenti, allora uno è contenuto nell’altro.
Si dicono sghembi se non sono incidenti e gli spazi direttori si intersecano in 0.
Esempi:
• due rette nel piano sono parallele o incidenti (o entrambi, e allora sono uguali);
• due rette nello spazio possono essere parallele, incidenti (sono i casi in cui sono complanari, cioè appartengono ad uno stesso piano) oppure sghembe;
• una retta e un piano nello spazio possono essere incidenti o paralleli (o entrambi, e
allora la retta è contenuta nel piano);
• due piani nello spazio sono paralleli o incidenti (o entrambi);
• due piani in R4 possono essere né incidenti, né paralleli né sghembi: trovare un esempio.
A.3.9
Esercizi di geometria lineare:
1
C
B Verificare che l’insieme dei vettori u = 12 , v = −1
, e w = −2
di R2 è generatore,
2
ed estrarne tutte le basi possibili di R2 .
0 −1 1 1
C
B Verificare che l’insieme dei vettori u = 2 , v = 0 , w = −1 , e z = 2 di
0
−1
−2
1
R3 è generatore, ed estrarne tutte le basi possibili di R3 . 2
1
C
B Nello spazio euclideo R3 si considerino i vettori v = 1 e w = 2 .
1
1
(a) Si decomponga il vettore v come somma v1 + v2 ove v1 sia ortogonale a w, e v2
parallelo a w.
(b) Si determinino le superfici dei due parallelogrammi aventi come lati i vettori v,v1
(primo parallelogramma) e v,v2 (secondo parallelogramma)
(c) Le due superfici del punto precedente risultano uguali: dire se si tratta di un risultato
generale (indipendente dai vettori v e w scelti), ed eventualmente giustificarlo e darne una
interpretazione in termini di geometria (piana) elementare. C
B Nello spazio euclideo R3 si considerino i vettori v1 =
2
0
−1
e v2 =
0
−2
1
.
(a) determinare il sottospazio ortogonale
a hv1 , v2 i;
1 −1
(b) decomporre il vettore w =
come somma w = w1 + w2 + w3 ove w1 sia parallelo
−9
a v1 , w2 sia parallelo a v2 e w3 sia ortogonale sia a v1 che a v2 .
(c) mostrare che i volumi dei tre tetraedri formati rispettivamente da w, w1 , w2 , w, w1 , w3
e w, w2 , w3 sono uguali tra loro (senza calcolarli).
C
B Nello spazio euclideo R3 si considerino le rette r ed s di equazioni rispettive X − 1 =
Y, X + Y = Z; X = Z, X − Y = 2.
(i) Trovare la retta n normale ad r ed s ed incidente sia r che s;
(ii) Trovare la distanza tra r ed s.
C
B Nello spazio euclideo R3 , si considerino le rette r :
x=1+t
y=2+t
z=−1+2t
, s:
x=2+2t
y=3+t
z=1+t
.
(a) Si mostri che r, s sono incidenti e si trovi un’equazione del piano che le contiene.
(b) Si trovino delle equazioni cartesiane delle rette passanti per r ∩ s, parallele al piano
di equazione x + y + z = 0, e formanti angoli uguali con r ed s.
1 C
B Si scriva l’equazione del piano di R3 passante per il punto P = 0 e parallelo alle
−2
rette r, s di equazioni rispettive X = Y = Z e X + 3Y = 0 = X − Y + Z − 1.
APPENDICE A. ADDENDUM
360
1 C
B Si scriva l’equazione della retta t di R3 passante per il punto P = 0 complanare
−2
alle rette r, s di equazioni rispettive X = Y = Z e X + 3Y = 0 = X − Y + Z − 1. Si verifichi
poi se t è incidente o parallela a r ed s.
1
C
B Nello spazio euclideo tridimensionale si consideri la retta r per P = 1 , e direzione
0
0
1
v=
.
1
(a) si scriva l’equazione cartesiana del cilindro C formato dai punti che distano 1 da r.
(b) Si determinino i punti di intersezione di C con i tre assi coordinati.
(c) Si calcoli il volume del tetraedro definito dai punti trovati in (b). 0
C
B Nello spazio euclideo tridimensionale si consideri la retta r per P = 1 , e direzione
0
1
v= 0 .
1
(a) si scriva l’equazione cartesiana del cono C, di asse r, vertice P e semiapertura π3 . 1
(b) Si determinino i punti di intersezione, Q1 e Q2 , tra il cono C e la retta s per 1 e
0
1 direzione 1 .
−1
(c) trovare l’equazione del piano π contenente s e perpendicolare ad r; sia R = π ∩ r.
(d) Si calcoli il volume del tetraedro di vertici P , Q
11, Q2 , R.
1 1 C
B Calcolare le proiezioni ortogonali del punto P = 1 , e delle rette r1 = 1 +h −1 i,
1
1
0
1
1
1
1
r2 = 0 + h 1 i, r3 = 0 + h 0 i sul piano di equazione X + Y + Z = 1.
0
1
0
1 1
1
1
C
B Considerare la retta r data da 3 + h 2 i e il punto P = 1 di R3 . Determinare
2
1
0
la distanza tra i due, il punto su r di minima distanza, le equazioni della retta di minima
distanza.
2 C
B Considerare il piano π di equazione x − y + z = 1 e il punto P = −1 di R3 .
1
Determinare la distanza tra i due, il punto su π di minima distanza, le equazioni della retta
di minima distanza.
2
x + 2y = 1
C
B Considerare la retta r :
e il punto P = 1 di R3 . Determinare la
1
x + 2z = 1
distanza tra i due, il punto su r di minima distanza, le equazioni della retta di minima
distanza e le equazioni della retta parallela ad r passante per P .
C
B Triangoli. Nel piano euclideo R2 si consideri un triangolo T .
(o) Si ricordi che le rette che contengono le tre mediane di T appartengono ad un fascio;
(i) Si mostri che le rette che contengono le tre altezze di T appartengono ad un fascio;
(ii) Si mostri che gli assi dei lati di T appartengono ad un fascio (l’asse di un segmento
è la retta ortogonale al segmento passante per il suo punto di mezzo);
(iii) Si mostri che le bisettrici degli angoli interni di T appartengono ad un fascio;
(iv) Si mostri che le bisettrici degli angoli esterni di T intersecano i lati opposti in tre
punti allineati.
APPENDICE A. ADDENDUM
A.3.10
361
Classificazione delle coniche del piano euclideo
Completamento dei quadrati: si tratta della stessa tecnica che si usa per trovare la
formula risolutiva delle equazioni di secondo grado (si completa il quadrato dell’incognita:
da aX 2 + bX + c si passa a a(X + b/2)2 + c − ab2 /4, e poi si passa alla radice...), solo
applicato ad una equazione in due variabili X, Y : quando si completa il quadrato diciamo di
X, bisogna tener conto di tutti i termini contenenti X. Vi sono due casi possibili: compare
almeno un quadrato con coefficiente non nullo, oppure no.
(a) se compare X 2 , scriviamo
2
2
d
02
0 2
0
0
X 2 +bXY +cY 2 +dX+eY +f = (X+ 2b Y + d2 )2 +(c− b4 )Y 2 +(e− bd
2 )Y +(f − 4 ) = X +c Y +e Y +f
e riconosciamo una conica a centro se c0 6= 0, una parabola se c0 = 0 e e0 6= 0, una conica
spezzata se c0 = 0 e e0 = 0.
(b) se non compare nessun quadrato, allora abbiamo:
XY + dX + eY + f = (X + e)(Y + d) + (f − ed)
e quindi abbiamo una iperbole se f − ed 6= 0, una conica spezzata altrimenti.
Il completamento dei quadrati permette la classificazione affine delle coniche. In ogni
caso non permette una classificazione euclidea: perché?
Tuttavia si può dare un metodo elementare per la classificazione euclidea delle coniche
(che però non si generalizza al caso di quadriche), nel modo seguente. Sia
aX 2 + bXY + cY 2 + dX + eY + f = 0
l’equazione data
(a) Prima si considera la parte di secondo grado, e la si fattorizza (eventualmente con
coefficienti complessi); possono presentarsi tre casi:
o aX 2 + bXY + cY 2 = (αX + βY )2 è un quadrato,
oppure aX 2 + bXY + cY 2 = (αX + βY )(α0 X + β 0 Y ) è prodotto di due fattori distinti
(reali o complessi coniugati).
Consideriamoli allora separatamente:
(b1) Se la parte quadratica è un quadrato, allora si tratta di una parabola, e scegliendo
una retta Y 0 = βX − αY ortogonale ad X 0 = αX + βY possiamo scrivere il termine lineare
dX + eY = γX 0 + δY 0 come combinazione dei due; si arriva quindi ad una espressione
2 X 02 + γX 0 + δY 0 + f che si porta facilmente in forma canonica delle parabole (come?).
(b2) Se invece la parte quadratica si fattorizza in un prodotto reale, consideriamo le
bisettrici X 0 e Y 0 delle due rette αX + βY e α0 X + β 0 Y ; si tratta di rette ortogonali tra loro,
e possiamo scrivere il termine lineare dX + eY = γX 0 + δY 0 come combinazione dei due; si
arriva quindi ad una espressione X 02 + 0 Y 02 + γX 0 + δY 0 + f che si porta facilmente in
forma canonica (come?).
(b3) Se invece la parte quadratica si fattorizza in un prodotto di fattori complessi coniugati, consideriamo la semisomma X 0 e la semidifferenza Y 0 delle normalizzate delle due
rette αX + βY e α0 X + β 0 Y ; si tratta di rette reali ortogonali tra loro, e possiamo scrivere
il termine lineare dX + eY = γX 0 + δY 0 come combinazione dei due; si arriva quindi ad una
espressione X 02 + 0 Y 02 + γX 0 + δY 0 + f che si porta facilmente in forma canonica (come?).
Si noti che in ogni caso abbiamo trovato (dove?) anche le trasformazioni ortogonali che
portano in forma canonica euclidea le coniche.
Usando la tecnica precedente, si classifichino le seguenti coniche del piano euclideo, specificando per ciascuna il tipo, una equazione canonica, la relativa trasformazione ortogonale
di coordinate, eventuali centro, assi ed asintoti, ed infine tracciandone un disegno:
(a) 3x2 + y 2 + 4xy − 16x − 10y + 21,
(b) 2x2 + 3y 2 + 7xy + 3x − y − 4,
2
2
(c) 4x + y + 4xy + 8x + 4y − 5,
(d) 8x2 + 17y 2 + 12xy + 4x + 3y − 2,
APPENDICE A. ADDENDUM
362
(e) 4x2 + y 2 + 4xy − 29x − 12y + 53,
(f) x2 + y 2 + 2x − 4y + 5,
2
2
2
(g) 10x + 10y + 6x − 2y + 5,
(h) 6x − 6y 2 + 5xy + x + 8y − 7,
2
2
(i) x + 4y + 4x + 16y − 16,
(l) x2 + 16y 2 − 8xy + 8x − 15y − 5.
A.3.11
Classificazione delle quadriche dello spazio euclideo
Completamento dei quadrati: come nel caso del piano, si può procedere la completamento
dei quadrati per il polinomio di secondo grado in tre variabili che determina la quadrica; si
ottiene tramite una trasformazione di coordinate affini (ma non ortogonali) una delle forme
canoniche, il che permette di determinare il tipo di quadrica in questione (riducibile, cono o
cilindro, paraboloide o a centro, eventualmente iperboloide o ellissoide, rigata o meno).
In generale una equazione di secondo grado determina unicamente una matrice simmetrica
d’ordine 4 nel seguente modo:
1
a β γ δ
β b d0 c0 X
= a+bX 2 +cY 2 +dZ 2 +2βX+2γY +2δZ+2d0 XY +2c0 XZ+2b0 Y Z ,
1 X Y Z
γ d0 c b0 Y
Z
δ c0 b0 d
e le proprietà della conica sono determinate dalla matrice:
◦ è un piano doppio se e solo se la matrice ha rango 1,
◦ è una coppia di piani distinti se e solo se la matrice ha rango 2,
◦ è un cono o un cilindro se e solo se la matrice ha rango 3,
◦ uno dei tipi non degeneri se e solo se la matrice ha determinante non nullo.
Distinguere i vari tipi di quadriche dalla matrice è piuttosto sofisticato.
Cambiamenti affini di coordinate?
Appendice S
Soluzioni
S.1
Insiemi numerici e funzioni
3141
APPENDICE S. SOLUZIONI
S.2
S.2.1
3142
Calcolo in una variabile
Parti intere e arrotondamenti
[x]
[x + 12 ]
x − [x]
x − [x + 21 ]
S.2.2
(x2 + 1)± , (x4 + 1)± ,
x2 + 1
1
x2 + 1
x4 + 1
1
x4 + 1
APPENDICE S. SOLUZIONI
S.2.3
3143
(x3 + 1)± , (x5 + 1)± ,
x3 + 1
S.2.4
x3
1
+1
x5 + 1
1
x5 + 1
x2 − 1
1
x2 − 1
x4 − 1
1
x4 − 1
(x2 − 1)± , (x4 − 1)± ,
APPENDICE S. SOLUZIONI
S.2.5
3144
p
p
(x2 − 1), 3 (x3 − 1)
p
√
3
S.2.6
|x2 − 1|
x3 − 1
p
p
(x2 + 1), 3 (x3 + 1)
√
x2 + 1
√
3
x3 + 1
S.2.7
x sin x, x cos x
x sin x
x cos x
APPENDICE S. SOLUZIONI
S.2.8
3145
sin x cos x
, x
x
sin x
x
S.2.9
sin x1 , cos x1
cos x1
sin x1
S.2.10
x sin x1 , x cos x1
x sin x1
x cos x1
cos x
x
APPENDICE S. SOLUZIONI
S.2.11
3146
sin x2 , cos x2
sin x2
S.2.12
sin x3 , cos3
sin x3
S.2.13
cos x3
√
√
sin x, cos x
√
sin x
S.2.14
cos x2
cos
√
x
potenze e radici di sin x, cos x
sin3 x
sin4 x
sin x
sin2 x
sin x
p
| sin x|
√
3
sin x
APPENDICE S. SOLUZIONI
S.2.15
3147
x + sin x, x + cos x
x + sin x
x + cos x
S.2.16
x + 2 sin x, x + 2 cos x
x + 2 sin x
x + 2 cos x
APPENDICE S. SOLUZIONI
S.2.17
3148
(1 + 1/x)x
e
1+
S.2.18
1 x
x
xn e−x , x1/n e−x
e−x
−x
xe
x2 e−x
x3 e−x
x4 e−x
e−x
|x|1/2 e−x
sgn(x)|x|1/3 e−x
|x|1/4 e−x
sgn(x)|x|1/5 e−x
APPENDICE S. SOLUZIONI
S.2.19
3149
xn log |x|, x1/n log |x|
log |x|
x log |x|
x2 log |x|
x3 log |x|
x4 log |x|
S.2.20
log |x|
|x|1/2 log |x|
sgn(x)|x|1/3 log |x|
|x|1/4 log |x|
sgn(x)|x|1/5 log |x|
ex + log |x|, ex log |x|
ex + log |x|
ex log |x|
APPENDICE S. SOLUZIONI
S.2.21
S.2.22
e±x , e±x
3150
2
2
ex
e−x
ex
2
e−x
e1/x
e−1/x
e1/x
2
e−1/x
2
e±1/x , e±1/x
2
APPENDICE S. SOLUZIONI
3151
S.2.23
√
Moltiplicando sopra e sotto per 1 + x otteniamo
Z r
Z
Z
Z
p
1
x
1+x
1+x
√
√
√
dx =
dx +
dx = arcsin(x) − 1 − x2 .
dx =
2
2
2
1−x
1−x
1−x
1−x
S.2.24
Usando 1 come fattore differenziale, possiamo scrivere
Z p
Z
Z
p
p
−x2
−a2 + a2 − x2
2
2
2
2
2
2
√
√
dx = x a − x −
dx
a − x dx = x a − x −
a2 − x2
a2 − x2
Z
p
p
= x a2 − x2 + a2 arcsin(x/a) −
a2 − x2 dx
da cui il risultato.
S.2.25
Evidente conoscendo le derivate dei settori. In alternativa?
S.2.26
Stessa strategia del successivo.
S.2.27
Usando 1 come fattore differenziale abbiamo
Z
Z √ 2
p
a − x2
1
√
dx = a2 − x2 + a2
dx
x
x a 2 − x2
e siamo ricondotti alla primitiva più difficile S.2.29.
S.2.28
Qui conviene usare la sostituzione x =
Z
x
√
Z
1
x2
−
a2
dx = −
1
d(cos y)
, donde dx = −
e si ottiene
cos y
cos2 y
1
p
1−
a2
cos2
y
d(cos y) =
1
1
a
arccos(a cos y) = arccos
a
a
x
S.2.29
Un metodo è usare la sostituzione x = a sinh y, da cui dx = a cosh ydy, e abbiamo
√
Z
Z
1
1
1
1
1
a2 + x2
√
dx =
dy = − settanh(cosh y) = − settanh
a
sinh y
a
a
a
x a2 − x2
in cui sostituire l’espressione di settanh in termini di log, e poi razionalizzare tutto...
S.2.30
Per esempio per il segno + conviene usare la sostituzione x = a sinh y, per il segno − conviene
x = a cosh y.
APPENDICE S. SOLUZIONI
3152
S.2.31
Moltiplicando sopra e sotto per cos x si ottiene
Z
Z
Z
1 + sin x 1
cos x
d(sin x)
=
settanh(sin
x)
=
log
dx =
dx
=
cos x cos x
cos2 x
1 − sin2 x
du
(da notare che una primitiva di 1−u
2 si può ottenere sia con settanh u sia usando le funzioni
q
1+u
razionali log 1−u , giustamente uguali, a meno di costanti...).
S.2.32
Moltiplicando sopra e sotto per 1 ∓ cos x si ottiene
Z
Z
Z
Z
1
1
d(sin x)
1 ∓ cos x
1
dx
∓
= cotan(x) ±
dx =
dx
=
2
2
2
1 ± cos x
1 − cos x
sin x
sin x
sin x
S.2.33
Usando 1 come fattore differenziale, possiamo scrivere
Z
Z
p
x
√
dx = x arcsin x + 1 − x2
arcsin x dx = x arcsin x −
1 − x2
S.2.34
Conviene sostituire y = tan x, quindi dy = (1 + tan2 x)dx = (1 + y 2 )dx, da cui
√
Z
Z
1
1
dy
a
1
1 + a2
√
dx
=
arctan
y
=
a2
2
a2 + cos2 x
1 + a2
1 + a2
a
1 + a2
1 + 1+a
2y
S.2.35
Simile al caso trigonometrico: moltiplicando sopra e sotto per cosh x.
S.2.36
Simile al caso trigonometrico: moltiplicando sopra e sotto per 1 ∓ cosh x
S.2.37
Usare le sostituzioni standard!
S.2.38
Simile al caso trigonometrico: usando 1 come fattore differenziale.
S.2.39
Simile al caso trigonometrico: usare la sostituzione y = tanh x.
S.2.40
Integrando due volte per parti sempre con fattore differenziale eαx , otteniamo
Z
Z
1 αx
β
αx
e cos(βx)dx = e cos(βx) +
eαx sin(βx)dx
α
α
Z
1 αx
β αx
β2
= e cos(βx) + 2 e sin(βx) − 2
eαx cos(βx)dx
α
α
α
da cui si ricava la primitiva desiderata.
APPENDICE S. SOLUZIONI
3153
S.2.41
Ci si riconduce all’integrale precedente con la sostituzione y = log x, da cui x = ey e dx =
ey dy e si ottiene:
Z
Z
ey
x
sin(log x)dx = sin(y)ey dy = (sin(y) − cos(y)) = (sin(log x) − cos(log x))
2
2
S.2.42
La prima serie va calcolata ad hoc:
il primo è una potenza elementare;
per il secondo si usa il primo come fattore differenziale;
per il terzo si moltiplica sopra e sotto per la radice, e si separano i due addendi;
il quarto è una potenza elementare;
per il quinto si usa il quarto come fattore differenziale;
per l’ultimo si usa la sostituzione t2 = ax + b.
Per la seconda serie, si usa il completamento del quadrato del radicando:
2ax − x2 = a2 − (x − a)2
per ricondursi al caso di radicandi del tipo a2 − t2 che si dovrebbero conoscere.
APPENDICE S. SOLUZIONI
S.2.43
3154
Esempi di traiettorie ortogonali:
x2 + y 2 = 2dy
x2 − y 2 = d
x2 + y 2 = 2cx
xy = c
APPENDICE S. SOLUZIONI
2
2
x +y =b
2
2
2
2
x + 2y = b
x + 3y = b
3155
y 2 = d − 2x
y = ax
y = ax
2
y = ax
3
y = cex
y(d − x) = 1
y 3 = c − 3x
2y 2 (d − x) = 1
y 4 = c − 4x
APPENDICE S. SOLUZIONI
S.3
Geometria lineare
3156