Equazioni differenziali
1
Cenni sulla soluzione di alcune EQUAZIONI DIFFERENZIALI
Lasciando ovviamente agli amici e colleghi Matematici il compito di sviluppare compiutamente e approfondire
la teoria sull’integrazione delle equazioni differenziali, si vogliono qui soltanto introdurre e puntualizzare
alcuni argomenti che si possono incontrare nella risoluzione e nella discussione dei problemi di Fisica (A.G.).
Affrontando la risoluzione di semplici problemi monodimensionali, si incontrano Equazioni del tipo:
1)- Moto uniformemente accelerato, (accelerazione a , velocità V , posizione x):
a Costante = g
dV
g
dt
ovvero
d 2x
g
dt 2
[1]
2)- Moto di un corpo di massa m , soggetto alla forza F (costante) , in un mezzo viscoso (coefficiente di
viscosità ) :
ma F V
d 2x
dx
m 2
F
dt
dt
m
dV
V F
dt
[2]
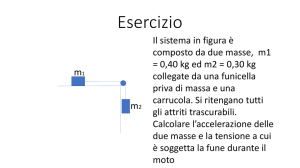
3)- Moto di una fune ideale, omogenea, lunga L , di massa m e densità lineare che "scivola giù" da un tavolo
(senza attrito) (essendo x la lunghezza della fune già scivolata fuori dal tavolo):(Occorre ipotizzare un vincolo piano liscio verticale - su cui la fune che cade si appoggi, onde evitare che, durante la "caduta", la fune assuma
una componente orizzontale della quantità di moto)
ma xg
m
d 2x
gx = 0
dt 2
[3]
4)- Moto di un corpo di massa m collegato ad una molla ideale di costante elastica k, senza attrito (moto
armonico) :
ma kx
m
d 2x
+ kx = 0
dt 2
[4]
Cerchiamo, come soluzione delle equazioni proposte, una X funzione della variabile indipendente t tale che,
sostituendo X(t) e le sue derivate nell'equazione di partenza, quest'ultima si riduca ad una identità.
Equazioni differenziali
2
Equazioni differenziali.
Ordine :
ordine massimo delle derivate di X (t).
{Es: m
Grado:
d 2x
dx
x F è di 1° ordine}.
2 + kx = 0 è del 2° ordine ; m
dt
dt
massimo grado della derivata di ordine massimo.
{Tutte le equazioni precedenti sono di 1° grado]}.
Omogenea:
contiene solo termini dipendenti da X e dalle sue derivate (spesso i termini che non
dipendono da X e dalle sue derivate, quando esistono, vengono posti al secondo membro,
permettendo di individuarli più facilmente).
{Es. di equazione omogenea:
m
d 2x
+ kx = 0
dt 2
Es. di non omogenee: la [2] di pag.1 m
;
d 2x
dx
F
2
dt
dt
m
dV
V F
dt
d 2x
dx
A 2 + B
+ C x = g(t ) }
dt
dt
e la [8] di pag.7:
Lineare:
la variabile dipendente e le sue derivate figurano solo al primo grado, senza prodotti
misti; in caso contrario la equazione si dice non lineare
{Le [1]-[4] e la [8] sono tutte lineari }.
In una equazione lineare la variabile indipendente può figurare ad ogni grado o essere argomento di funzioni
trascendenti.
Ogni equazione lineare è automaticamente di primo grado
necessariamente lineare. {Esempio:
ma una equazione di primo grado non è
d x
dx
h 0 non è lineare perchè la derivata prima figura alla
2 k
dt
dt
2
2
seconda potenza ma è di 1° grado perchè le derivata di ordine massimo figura alla prima potenza}.
La soluzione di una equazione di ordine n contiene n costanti arbitrarie.
Nella risoluzione dei problemi di Fisica queste costanti arbitrarie si determinano con i dati forniti dal problema
per i valori che le grandezze fisiche assumono in particolari circostanze (valori al contorno o spesso iniziali: ad
esempio la velocità che assume il corpo in un determinato istante - anche, eventualmente, nell’istante iniziale per la [1]; la velocità in un certo istante e la lunghezza della fune che all’istante iniziale si trova già
“penzolante” dal tavolo, per la [3] ecc.).
Equazioni differenziali
3
Equazioni di 1° ordine a variabili separabili.
dx
f (t )
dt
g ( x)
g(x) dx = f(t) dt
g(x)dx C f (t )dt C
1
2
[5]
o anche, posta C = C2 - C1 una costante arbitraria che terrà conto dei valori al contorno forniti dai singoli
problemi, si può scrivere in definitiva:
g(x)dx f (t )dt C
[5.a]
--- Rientrano in questo gruppo le equazioni del tipo [1] .
------------------------------------------------------Digressione sulle costanti di integrazione.
L’equazione (del tipo [1]) F ma m
Infatti la si può scrivere
F
dt dV
m
F
dt C1 dV C2
m
dV
è del tipo a variabili separabili [5] o [5.a].
dt
. Integrando ambo i membri (con F e m costanti):
F
t C1 V C2
m
[5.b]
In alternativa, pensando che il moto venga studiato nell’intervallo di tempo da t0 a t (durante il quale la velocità
varia da V0 a V ), la soluzione [5], in termini di integrali definiti, potrebbe essere scritta come :
V
F t
dt
dV
V0
m t0
e, eseguendo gli integrali:
F
t t0 V (t ) V0 .
m
[5.c]
Nella [5.c] l’assegnazione di un valore a t0 corrisponde alla scelta, arbitraria, dell’origine dei tempi (istante
iniziale), cioè a stabilire l’istante in cui “scattare il cronometro”; detta scelta può essere effettuata una sola
volta nella risoluzione di un problema; spesso (ma non sempre!) può convenire porre t0 = 0 .
La scelta di t0 nella [5.c] corrisponde alla scelta di un valore da assegnare a C1 nella [5.b].
L’istante iniziale viene quindi scelto arbitrariamente. Il nostro problema però, per essere univocamente
determinato, deve anche fornire l’indicazione di quanto vale in detto istante la velocità V(t0) ; ciò permette di
assegnare il valore appropriato al parametro V0 della [5.c].
Nella [5.c] la costante V0 rappresenta appunto il valore V(t0) assunto dalla velocità all’istante iniziale.
La determinazione di V0 nella [5.c] corrisponde alla determinazione di C2 nella [5.b] (C2 = - V0).
La forma [5.a] in cui compare solo la C , mette in evidenza il fatto che, una volta scelta arbitrariamente
l’origine dei tempi, il problema può ulteriormente assegnare il valore di un solo parametro (nel nostro esempio
V0 ).
Analoghe osservazioni valgono per la determinazione di S (t0) (strada già percorsa all’istante iniziale).
-------------------------------------------------
Equazioni differenziali
4
--- Altro esempio: moto di un corpo di massa m che parte dall’origine con velocità iniziale V0 e che si muove
in un mezzo viscoso di coefficiente ; unica forza applicata è Fa = -V , cioè quella provocata dall’attrito
viscoso (conviene considerare incognita la velocità V ):
ma V
con i dati : V(0) = V0
;
m
dV
V
dt
[2.bis]
X 0 = S0 = 0
Separando le variabili :
m
dV
dt
V
m.log
V
t - t0
V0
V t V0 e
m V
V
0
t
dV
= t dt
0
V
log
V
t t0
V0
m
t t0
m
L'argomento della funzione esponenziale deve essere un numero puro, pertanto il coefficiente
m
deve
avere dimensioni di un tempo ; la soluzione, di conseguenza, può essere scritta come
V t V0 e
t t0
V t V0 e
che, per t0 = 0 , diviene:
t
[2.ter]
Il significato del coefficiente è ora evidente: esso rappresenta l'intervallo di tempo (calcolato a partire da
t=0) durante il quale la velocità si riduce di un fattore 1/e.
Integrando ulteriormente si può, a questo punto, ottenere la strada percorsa S (t) (scritta ancora per t0 = 0):
dS S t - S
S
S0
0
=
V t dt V .e
t
t
0
0 0
t
t
t
t
. dt = V0 e V0 1 e S1 e
0
t
Il coefficiente S .V0 ha le dimensioni di una lunghezza (tempo . velocità); esso rappresenta la strada che
il punto materiale ha percorso dopo un tempo molto lungo (teoricamente infinito) se parte dall'origine all'istante
iniziale (cioè, come detto, S0 = 0).
Equazioni differenziali
5
--- Rientra nel tipo a variabili separabili anche l'equazione del punto [2] (anche in questo caso conviene
considerare come incognita la velocità V):
m
dV
F V
dt
m
cioè
dV
dt
F V
[2]
Conviene operare un cambiamento di variabile ponendo :
z F V
dz = dV
dV
dz
Allora sostituendo nella [2]:
m
dV
= dt
z
m dz
dt
z
dz
=
dt
z
m
e quest'ultima, a variabili separate, si integra semplicemente membro a membro.
Z
Z0
dz
=
z
m
dt
t
t0
ln
z
=
t t 0
z0
m
Passando dai logaritmi ai numeri (e ponendo t0 = 0 )
z
e
z0
t
m
z = z0 e
t
m
Ritorniamo alla variabile di partenza V , (chiamando z0 = F V0
F V (t ) F V0 e
dove V0 = V (t0) ); quindi:
t
m
Riordinando, con passaggi successivi, si trova la soluzione V(t):
F F V0 e
t
m
= V (t )
F
m t
F
V t
V0 e
[6]
Equazioni differenziali
6
I limiti della soluzione [6] sono:
lim V =
t 0
F
F
V0 V0
limV
;
t
F
VLimite
Dall’ultima relazione si vede che Vlimite è il valore assunto dalla velocità dopo un tempo molto lungo
(teoricamente infinito) qualunque sia la velocità iniziale. Nei vari problemi può risultare Vlimite > = < V0
Anche qui si può introdurre il coefficiente con significato analogo a prima (
La soluzione ora diviene:
V (t ) VLimite VLimite V0 e
t
t
VLimite 1 e V0 e
t
m
) (vedi pag.4).
[6.bis] (vedi Nota a pag. 12)
Anche qui integrando si può ottenere dalla [6] un'espressione per la strada S(t), percorsa al tempo t :
dS S (t ) S 0
t
0
=
V (t )dt V
t
0
dt
t
Limite 0
V Limite V0 0 e
t
t
dt
dove S(0) è la strada già percorsa all’istante iniziale; con alcuni passaggi algebrici, otteniamo :
S t = V Limite t + V Limite V0
t
e
1
+ S (0) V Limite t S1
t
e
1
S (0)
avendo chiamato S1 il coefficiente VLimite V0 che ha dimensioni di una lunghezza.
In definitiva: dopo un tempo sufficientemente lungo, quando l'esponenziale si approssima a zero, il moto è
praticamente uniforme, con velocità VLimite .
Esempi di applicazione fisica dell’equazione [2] sono la caduta di un sasso nell’acqua o di una goccia di pioggia
(o un chicco di grandine) nell’aria ; in questi casi F è la forza peso e rappresenta il coefficiente di viscosità del
mezzo (aria o acqua).
-------------------------------------------------------
Equazioni differenziali
7
Equazioni di 2° ordine, lineari, a coefficienti costanti.
d 2x
dx
+ Cx = 0
2 + B
dt
dt
d 2x
dx
A 2 + B
+ C x = g(t )
dt
dt
A
omogenea
[7]
non omogenea
[8]
A , B , C costanti reali. (è consuetudine ridursi ad A >0 )
Studio della Omogenea. Valgono le regole:
1)-- Se X=f (t) è una soluzione, allora anche C1.X è una soluzione (con C1 costante).
2)-- Se X1 = f1 (t) e X2 = f2 (t) sono soluzioni indipendenti, allora anche una qualsiasi loro combinazione
lineare C1 X1 + C2 X2 è una soluzione (dove C1 , C2 sono costanti ).
Le proprietà 1) e 2) dipendono dal fatto che l'equazione è lineare ed omogenea.
Ipotizziamo una soluzione del tipo X = eZt :
X e
Zt
dX
Ze Z t
dt
d2X
2
Zt
2 Z e
dt
Sostituendo nella [7] troviamo i valori cui deve soddisfare Z affinché eZt sia soluzione della [7]:
AZ 2 eZ t BZeZ t C eZ t = 0
AZ 2 + BZ + C = 0
2
B B 4 AC = Z
1
2A
Z=
2
B + B 4 AC
= Z2
2A
Quindi (usando la proprietà (2) ) si ha la soluzione generale
X C1 e Z1 t + C2 e Z2 t
con C1 e C2 costanti arbitrarie da determinare di volta in volta in base ai dati dei problemi.
2
Si presentano i tre casi B 4 AC
> 0
= 0
< 0
[9]
Equazioni differenziali
8
Caso DISCRIMINANTE B 2 4 AC > 0
Casi particolari:
---Con
A , B , C non nulli e tutti > 0 abbiamo :
B2 4 AC certamente < B
B
Z
1
B
Z2
quantità
< B
certamente < 0
2A
quantità
< B
certamente < 0
2A
X C1 e Z1
quindi:
quindi:
t
+ C2 e Z 2
t
lim X 0
e anche
[10]
t
--------------------------------------------------------------------Con
A=m (>0) ; B=0
;
C = -g ( < 0 )
si ottiene la soluzione della [3] ("fune che scivola") (X è la coordinata dell’estremo destro della fune):
4mg
= K
2m
Z1
X = C1 e K t + C2 e K t
Z2 =
;
da cui anche
4mg
= K
2m
dX
= KC1 e K t KC2 e K t
dt
[11]
Introducendo nelle [11] appropriati valori al contorno (valori iniziali) si ottengono le soluzioni per varie
situazioni della fune:
--a)-- Con X0 = 0 ; V0 = 0 (per t= 0 )
--b)-- Con
X0 =
L / 2 (fune per metà sul tavolo)
L
C1 C2
2
;
4mg
2m
(resta ferma !!!)
;
V0
0 KC1 KC2
C1
L
4
= 0
(per t=0) ,
si ottiene:
[11.bis]
L
.
4
g
g
m
che, con , diviene K
m
L
L
Dalle [11.bis], con passaggi si ottiene:
Ricordare: K
si ottiene C1 = C2 = 0
;
C2 C1
Equazioni differenziali
9
La soluzione generale del sottocaso (b) per la posizione X , la velocità V e la accelerazione a diviene:
L Kt
L e Kt e Kt L
Kt
X e e
cosh Kt
4
2
2
2
[12]
dX
L e Kt e Kt
L
V
K
... sostituendo K....
dt
2
2
2
a
g
senh Kt
L
dV L 2 e Kt e Kt
L g e Kt e Kt g
K
... sostituendo K 2 ..=
cosh Kt
dt
2
2
2 L
2
2
[13]
[14]
Da queste, ad esempio, per t = 0 (ricordiamo che, in questo sottocaso (b), metà della fune si trova all’inizio
sul tavolo, metà “penzolante giù dal tavolo”) :
a
g
g
cosh 0
2
2
(Forza peso mg/2 applicata all'intera massa m ).
Quando tutta la fune abbandona il tavolo ( X = L):
L Kt
e eKt
4
X L
a
g
(4) g
4
eKt eKt 4
e sostituendo la parentesi nella [14] si ricava:
cioè la fune è in caduta libera (ovvio!)
Per trovare la velocità ( sempre per X=L) si usano le [12] [13], innalzate al quadrato:
L2
X L cosh 2 Kt
4
2
2
;
L2 2
V K senh 2 Kt
4
2
V2
;
4 2 2 senh 2 Kt
LK
V2
cosh 2 ( Kt ) senh 2 ( Kt ) 1 4 4 2 2
LK
4 cosh Kt
2
e sottraendo membro a membro:
V2
3
Lg
4
---------------------------------------Nota aggiuntiva . Nel problema della fune che "cade dal tavolo" occorre fare una precisazione.
Se si esclude l'istante iniziale, la fune si muove tutta con una velocità V che cresce nel tempo (in modo non
lineare: si ricordi che anche l'accelerazione non è costante!). Nell'istante in cui un tratto infinitesimo (di massa
dm) di fune abbandona il tavolo (e incomincia a cadere) possiede già una velocità, orientata secondo l'asse
orizzontale (per es. asse Z) e quindi una quantità di moto secondo lo stesso asse. Una volta abbandonato il
tavolo, le forze applicate al tratto dm non hanno componenti orizzontali (lungo l'asse Z), pertanto la
componente orizzontale della quantità di moto del tratto di fune dm resta costante; in altre parole il pezzettino di
fune, anche se perfettamente flessibile, "cade" come un corpo lanciato con una velocità iniziale orizzontale non
nulla e tenderebbe quindi a scostarsi dal bordo del tavolo. Per obbligare la fune a piegarsi ad angolo retto
iniziando la caduta, sarebbe necessario "costringerla" con un vincolo (un tubo fisso, piegato ad angolo retto
verso il basso - tubo in cui far scorrere la fune senza attrito; oppure semplicemente un piano verticale fisso
contro cui la fune urta e poi scorre verticalmente - sempre senza attrito): è quindi necessario un "vincolo" per
"assorbire" la componente orizzontale della quantità di moto della fune.
Equazioni differenziali
Caso DISCRIMINANTE = 0 cioè
B2 - 4AC = 0
;
Z1 Z2
10
B
Z
2A
La soluzione non è (come qualcuno potrebbe erroneamente pensare):
X C1e Zt C2 e Zt C1 C2 e Zt
ERRATA
ERRATA
X C1eZt t C2 eZt
La soluzione corretta è :
[15]
----------------------------------(B2 - 4AC) < 0
Caso DISCRIMINANTE < 0
In questo caso, chiamando j la unità immaginaria, si può scrivere:
B j 4 AC B 2
B
4AC - B 2
Z1
=
j
j
2A
2A
2A
Z2
avendo posto
B j 4 AC B 2
B
4AC - B 2
j
= j
2A
2A
2A
B
2A
4AC - B 2
2A
e
A questo punto la [9] diviene:
con e costanti reali positive.
X C1 e j t + C2 e j t
[16]
che, opportunamente trasformata, si può anche scrivere:
X X 0 et sen t
[17]
Le costanti arbitrarie C1 , C2 della [16] si trasformano nelle costanti X0 , della [17] ; tutte queste costanti
sono da determinare con i valori al contorno forniti per i singoli problemi. La forma [17] evidenzia che siamo di
fronte a un moto armonico smorzato.
I passaggi riportati qui di seguito suggeriscono un modo per passare dalla forma [16] alla forma [17] .
X C1e t e j
poniamo
C1 K1 K2
t
C2 e t e j t e t C1 e j t C2 e j t
;
C2 K1 K2
e la [18] diviene:
X e t ( K 1 e j t K 2 e j t K1 e j t K 2 e j t )
Raccogliendo i termini K1 , K2 e moltiplicando una parentesi per 2/2 , l’altra per (2j/2j) :
[18]
Equazioni differenziali
X e
t
X e t
e j t e j t
+ 2 j K2
2 K1
2
cos (t )
2K1
e ponendo infine 2K1 = X0 sen
e j t e j t
2j
sen (t )
+ 2jK 2
11
cioè:
e 2 j K2 = X0 cos X0 e opportune costanti ):
X et X 0 sen() cos( t )
+
X 0 cos() sen( t )
[17a]
cioè come apparirebbe la [17] dopo aver sviluppato sen t .
--- Il caso particolare con A = m ; B = 0 e C = k > 0 porta all'equazione del moto armonico: (vedi anche la
[4])
X X 0 sen t
[19]
-t
Infatti se B = 0 , allora anche e di conseguenza e = 1
Il che compare nella [19] coincide ora con quella che, a suo tempo, abbiamo chiamato la pulsazione del moto
armonico.
C
A
k
m
-------------------------------------------------------------------------------------------------------Equazione non omogenea
La soluzione dell'equazione non omogenea [8] si ottiene dalla soluzione della equazione omogenea [7]
sommando a questa una soluzione particolare della non omogenea (l’Analisi Matematica insegna come trovare
questa soluzione particolare).
Equazioni differenziali
12
Nota
Anche l’equazione [2] pag. [1] è non omogenea. Si può ora verificare che, anche per essa, la soluzione [6.bis] si
poteva trovare molto semplicemente sommando alla soluzione della omogenea associata, una soluzione
particolare della non omogenea.
La omogenea associata è proprio la [2.bis] di pag. [4] e la sua soluzione è la [2.ter] sempre di pag.[4]
m
dV
F V
dt
m
dV
V
dt
V t Ae
m
m
t t0
m
dV
V F
dt
dV
V 0
dt
o anche
V t A e
t
non omogenea
[2]
omogenea associata
[2.bis]
soluz. della omogenea
[2.ter]
dove A è una opportuna costante da determinare (equazione di 1° ordine = 1 costante arbitraria).
Una soluzione particolare della non omogenea [2] (per
[2.ter] diviene: V (t )
F
Ae
F
dV
che sommata alla
0 ) è certamente V
dt
t
F
F
A
ricaviamo A V0
e
t
t
F
F t F
che è la [6.bis] di pag.[6]
V (t ) V0 e 1 e V0 e
Con F=0 si ottiene di nuovo la [2.ter] ( F 0 comporta A =V0 ).
Con la condizione iniziale V (t 0) V0
quindi