Il cerchio di centro C e raggio r è l'insieme dei punti che distano r da C:
{ P : d(P,C) = r } = { (x,y) : (x – xC)2 + (y – yC)2 = r 2 }
Tutti i cerchi sono comunque ottenibili dal cerchio di centro (0,0) e raggio 1, cioè di
equazione x2+y2=1, componendo
trasformazioni di scala monometriche e traslazioni.
Le ellissi sono le figure ottenibili dallo stesso cerchio componendo movimenti piani e
trasformazioni di scala anche non monometriche.
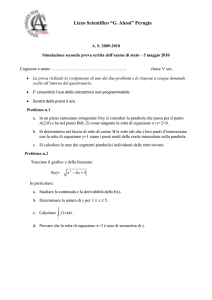
A lato (disegno a sinistra) è illustrato come
dal cerchio x2+y2=1 (α) è ottenibile il cerchio
β con una trasformazione di scala
monometrica (di fattore 4) e, poi, il cerchio γ
con una traslazione (di vettore (4,3)).
A destra è illustrata la generazione delle ellissi β (con una trasformazione di
scala fattori 5 e 3) e, poi, γ (con una traslazione di vettore (4,4) seguita da una
rotazione attorno a (4,4) di –30°).
Le figure di equazione y = ax2 (con a numero reale diverso da 0) e quelle ottenute da
esse con movimenti piani vengono chiamate
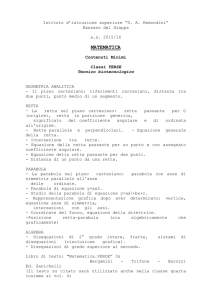
parabole. Il disegno sotto a sinistra
illustra una possibile generazione della parabola γ: la parabola y=2x2 (α) viene traslata
con Δx = –3, Δy = 1 (ottenendo β) e infine ruotata di 240° attorno alla nuova posizione
del vertice, cioè del trasformato del punto (0,0) della parabola iniziale.
Le figure di equazione y = a/x e tutte quelle ottenute da esse con movimenti piani
vengono chiamate iperboli equilatere. Sono tali α (y=1/x) e β (ottenuta da α con una
rotazione di 45°) nel disegno sopra a destra (altri esempi:
,
).
I due "rami" che compongono una iperbole equilatera tendono a spiaccicarsi su due
rette perpendicolari. Si chiamano iperboli anche le figure ottenute applicando
trasformazioni di scala non monometriche (la figura γ nel disegno, ottenuta da β con una
trasformazione di scala che lascia immutate le x e moltiplica le y per 3/4); queste figure
tendono a spiaccicarsi su due rette non perpendicolari (le rette su cui tende a spiaccicarsi
un'iperbole, o un altro tipo di curva, vengono chiamate asintoti).
Al posto di iperbole equilatera si usa spesso
l'espressione iperbole rettangola, che meglio richiama il fatto che si tratta di
una iperbole ad asintoti perpendicolari (nel caso dei poligoni l'aggettivo
"equilatero" indica l'equaglianza dei lati, qui la eguaglianza di due particolari
segmenti che intervengono in un metodo per tracciare le iperboli che verrà
discusso in una successiva voce).
Sia i cerchi, che le
parabole e le iperboli
equilatere sono figure tutte
tra loro simili. La figura a
lato illustra la
trasformazione di scala
monometrica di fattore 2
di un cerchio e di una
parabola. Le nuove figure
sono meno "appuntite" ma
hanno la stessa forma.
La parabola y = ax2 si
ottiene da y = x2 con la
scala 1/a : al crescere
di a la parabola si
rimpicciolisce (del resto
più a è grande più y sale
rapidamente al crescere di
x, ossia più "stretta" è la
parabola).
Ellissi, parabole e iperboli sono tutte figure simmetriche, cioè dotate di assi di
simmetria: rette rispetto alle quali possono essere "ribaltate" senza cambiare aspetto,
ossia rispetto alle quali sono simmetriche di sé stesse[
trasformazioni geometriche].
Ogni retta è simmetrica (oltre che rispetto a sé stessa) rispetto a una qualunque retta ad essa
perpendicolare. Ogni segmento è simmetrico (oltre che rispetto alla retta a cui appartiene)
rispetto alla retta perpendicolare che passa per il suo punto medio (che viene in genere
chiamata semplicemente asse del segmento). Ogni angolo è simmetrico rispetto
alla bisettrice, ossia alla retta che lo divide in due angoli di uguale ampiezza.
L'ellisse ha 2 assi di simmetria; se è un cerchio ne ha infiniti. L'iperbole ne ha 2, la parabola
1. Il rettangolo e il rombo ne hanno 2; se sono quadrati ne hanno 4. I poligoni regolari,
ossia con lati e angoli uguali, ne hanno tanti quanti i lati: essi sono ottenibili a partire da una
retta che sia bisettrice di un qualunque angolo mediante successive n-1 rotazioni ampie
360°/(2n), se n è il numero dei lati. I quadrangoli regolari sono i quadrati,
i triangoli regolari sono i triangoli equilateri (i quadrangoli equilateri non sono invece
necessariamente regolari: possono essere rombi non quadrati).
Segmenti, rettangoli, rombi, ellissi e iperboli sono tutte figure dotate di un centro di
simmetria: un punto rispetto al quale possono essere ruotate di 180° senza cambiare
aspetto, ossia rispetto alle quali sono simmetriche di sé
stesse [
trasformazioni geometriche]. Lo sono anche tutti i poligoni regolari con un
numero pari di lati.
Una retta che "tocca" il cerchio senza attraversarlo viene
detta tangente al cerchio. La parola "tangente" deriva dal latino, in cui
significava "che tocca". La "funzione tangente" [
direzioni e funzioni
circolari] deve il suo nome al fatto che, ad es., tan(30°) può essere
determinata prolungando il versore di direzione 30° applicato in (0,0) fino
a intersecare la "retta tangente" in (1,0) al cerchio di centro (0,0) e raggio
1: nella figura a lato, in cui è rappresentata la direzione 30°, c e ssono
rispettivamente il coseno e il seno di 30°; il fatto che il valore
dell'ordinata tsia effettivamente la tangente di 30° deriva dal fatto che il
rapporto tra t e 1 (cioè t) è uguale al rapporto tra s e c, cioè
a sin(30°)/cos(30°) = tan(30°); o più semplicemente deriva dal fatto che t è
la pendenza della retta passante per (0,0) e inclinata di 30°: è la variazione
verticale che corrisponde a una variazione orizzontale di 1.
La retta tangente è perpendicolare al raggio che passa per il punto di contatto con il
cerchio.
Il concetto di retta tangente può essere esteso ad altre figure. Su ciò ci si soffermerà in
successive sezioni.
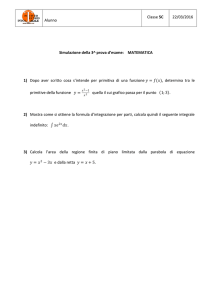
Qual è il vertice dell'angolo che è l'intersezione del semipiano y ≥
3 con il semipiano y ≤ x+1? Quale è la ampiezza di tale angolo?
y≥3
y≤x+1
Le rette che delimitano i due semipiani si incontrano nel punto di
ascissa x della retta y = 3 che è soluzione di 3 = x+1, ovvero nel
punto (2,3).L'intersezione dei due semipiani è l'angolo che ha tale
punto come vertice e che va dalla semiretta y = 3 AND x ≥ 2 alla
semiretta y = x+1 AND x ≥ 2, che ha ampiezza 45° (= π/4).
Per altri commenti:
figure 2 neGli Oggetti Matematici.
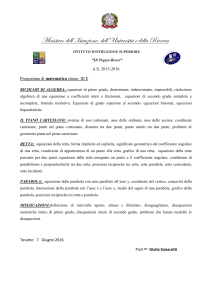
Nella illustrazione a lato la retta è tangente al cerchio. Scrivi le equazioni della retta e
del cerchio.
Sia Q il punto (2,1) comune a retta e cerchio. Gli altri punti (x,y) del cerchio distano dal
centro O = (0,0) quanto dista Q. Quindi il cerchio ha equazione:
x2 + y2 = 22 + 12, ossia:
x2 + y2 = 5.
La retta è perpendicolare al raggio passante per (2,1). Questo ha pendenza 1/2, quindi la
retta ha come pendenza l'opposto del reciproco di questo valore, ossia –2.
Una retta con pendenza –2 ha equazione del tipo y = –2x + k dove k è l'ordinata del punto in cui essa intercetta l'asse y.
La nostra retta intereseca l'asse y andando a sinistra, rispetto al punto (2,1) di 2; nel contempo sale di 4 (in quanto ha
pendenza –2); quindi interseca l'asse y in (0,5). L'equazione delle retta è quindi:
y = –2x + 5.
Volendo, si poteva ragionare "algebricamente", ad es. così:
la nostra retta deve passare per (2,1), ossia all'input x=2 deve corrispondere l'output y=1, ossia –2·2 + k deve essere
uguale a 1:
2·2 + k = 1
k = 1 + 2·2
k=5
Quindi la retta è y = –2x + 5.
Trigonometria: chi non ha seguito il libro nel biennio bisogna metterla!!!
Richiamo dal punto di vista analitico delle coniche!
Le parabole hanno la caratteristica di "riflettere" i "raggi" che entrano in esse
parallelamente all'asse di simmetria in modo che confluiscano in uno stesso punto,
detto fuoco (indicato con F nella figura) e, viceversa, di riflettere i raggi generati da una
sorgente luminosa collocata nel fuoco facendoli proseguire parallelamente all'asse di
simmetria.
Se una parabola ha equazione y = 3x2+x+1, qual è il suo fuoco?
[Traccia. Tieni conto che un raggio verticale che incide la parabola in un punto di
pendenza 1 viene riflesso orizzontalmente]
Da quanto indicato nella "traccia" deduciamo che il fuoco ha la stessa ordinata dei
punti in cui la pendenza è 1 o -1.
Nel caso della nostra parabola poiché Dx(3x2+x+1) = 6x+1 = 1 per x = 0, possiamo
dedurre che il fuoco ha ordinata (3x2+x+1)x=0 = 1.
La ascissa del fuoco è: la stessa del vertice, ossia del punto in cui la derivata è nulla:
6x+1 = 0 per x = -1/6.
Il fuoco è (-1/6,1).
Alla voce
prospettiva 1 abbiamo visto come
rappresentare una scena come quella a fianco (una casetta
vicina a una linea ferroviaria): i lati di base della casa e del
tetto, lo spigolo superiore del tetto e i binari hanno punti di
fuga sull'orizzonte. Lo spigolo superiore del tetto sta
sull'orizzonte; ciò significa che l'occhio sta alla stessa altezza
del tetto.
A, E e D sono punti di fuga di rette che stanno sul piano di
una delle facce del tetto; sono allineati, ma non sull'orizzonte
in quanto non si tratta di un piano parallelo al piano
orizzontale.
Abbiamo anche visto alcuni aspetti della storia dell'arte
legati a questo tema (alcuni di essi sono approfonditi in uno
specifico
ipertesto).
A sinistra è
richiamata, dalla
voce
prospettiva
1, una finestra in cui
puoi osservare la
casetta considerata
nella figura
precedente da diversi
punti di vista.
Nella stessa voce
abbiamo, poi,
preannunciato che ci
saremmo occupati di
alcuni problemi più
specifici, come quello
illustrato dalla figura
a lato, che qui
riprendiamo:
«Guardo una figura tracciata sul terreno da una
distanza di circa 20 m e da un'altezza iniziale di 2
m. Vicino alla figura è collocato un sistema di "assi"
di riferimento, con assi finiti (lunghi 10 m
ciascuno). La figura sembra un arco di ellisse. Ma
man mano che mi alzo (l'altezza passa da 2 m a 60
m) la figura mi appare come una parabola. È
possibile che una parabola venga vista come
un'ellisse?»
Affrontiamo, dunque, questo problema.
Ancora sulle proiezioni
Sopra abbiamo visto come una parabola, vista
dal basso, possa apparire un'ellisse. La figura a
lato illustra come mezza iperbole, collocata nel
piano xy ed avente gli assi x ed y come asintoti
(anche in questo caso raffigurati parzialmente),
man mano che il mio sguardo si dirige più
orizzontalmente tende ad assumere forma
ellittica, fino a che (figura D), quando lo
sguardo è diretto parallelamente alla sua
bisettrice, si presenta al mio sguardo proprio
come una semiellisse (e gli assi x ed y mi
appaiono come rette tra loro parallele).
A destra è
illustrata la
direzione dello
sgaurdo nella
situazione D.
Come è
possibile ciò?
Proviamo a dare
una risposta.
Se
clicchi qui accedi ad una visione animata di quel che accade tagliando un cono
circolare retto (avente come asse di simmetria l'asse z) con un piano con inclinazione
rispetto al piano z = 0 maggiore, minore od uguale a quella delle generatrici del cono
(dicesi generatrice una retta che passa per il vertice del cono e sta sulla sua superficie, la
cui rotazione attorno all'asse del cono genera il cono stesso). Puoi studiare meglio il
fenomeno azionando la
animazione "coniche".
Sotto, a sinistra, una sintesi della animazione: se taglio il cono con un piano, non
passante per il suo vertice, inclinato come una generatrice ottengo una parabola; se il
piano è inclinato di più o di meno ottengo un'iperbole o un'ellisse. Se guardo queste
intersezioni dal vertice del cono, dirigendo lo sguardo come l'asse di rotazione, le vedo
tutte circolari o, meglio, come un cerchio (l'ellisse) o un cerchio bucato (la parabola) o
un semicerchio (l'iperbole); vedi figure sotto a destra. Questa semplice spiegazione
risolve le apparenti contraddizioni generate dalle immagini precedenti.
Il fatto che ellissi, iperboli e parabole (
figure 2) possono essere ottenute dalla
intersezione di un cono con un piano è all'origine del fatto che tali curve vengono
chiamate, complessivamente, coniche.
Quanto ora detto permette di concludere anche che (
proiezioni tra superfici) le
coniche sono ottenibili l'una dall'altra mediante una proiezione centrale, e che quindi
sono indistinguibili dal punto di vista delle proprietà proiettive.
Le coniche possono essere tutte ottenute, nel piano xy, come grafico di una equazione
polinomiale di 2° grado, ossia di un'equazione in x ed y del tipo ax2 + bxy + cy2 + dx +
ey + f = 0 (affinché sia di 2° grado occorre che a, b e c non siano tutti nulli).
Un'equazione di questo genere ha alcuni casi "degeneri": casi in cui non ha
"punti" (x,y) che la risolvono (ad es. x2+y2+1=0), o ha per soluzione solo un punto (ad
es. x2+y2=0, soddisfatta solo se x=0 e y=0) o una retta (ad es. (x−y)2=0, soddisfatta solo
se y=x) o una coppia di rette (ad es. x2−y2=0, soddisfatta solo se y=x oy=−x). Negli altri
casi rappresenta un'ellisse, un'iperbole o una parabola.
Si può dimostrare che la classificazione in queste tre categorie dipende solo dai valori
di a, b e c. Vediamo la casistica:
• se
• se
• se
b2−4ac = 0 (ad es. (x−2y)2+3y−4=0) è una parabola,
b2−4ac > 0 (ad es. (x−y)(x+2y)+3y−4=0) è una iperbole,
b2−4ac < 0 (ad es. 0.5x2+y2+3y−4=0) è una ellisse.
Ecco, in ordine, i grafici dei tre esempi fatti sopra, tra parentesi:
Il volume
Le prime grandezze fisiche che, nella storia dell'umanità, sono state misurate sono le
lunghezze, le capacità ed i tempi, in quanto era facile confrontarle con delle unità
campione.
Per le lunghezze si usò il confronto prima con delle parti di corpo umano (braccio,
piede, pollice, pugno, …) o con il frutto di alcune azioni (in particolare il passo e suoi
multipli); in genere queste unità di misura non erano precise, e spesso variavano da un
paese all'altro; attraverso un lungo percorso si è arrivati prima, intorno al 1800, alla
definizione del "metro" come la lunghezza di una particolare asta di metallo, e, in tempi
successivi, alla sostituzione di essa con la distanza percorsa nel vuoto dalla luce in una
fissata frazione di secondo. Per le misure di capacità si fece uso di particolari
contenitori (anfore, tazze, boccali, casse, …), e queste venivano in genere usate al posto
delle misure di peso, che si svilupparono solo dopo, con l'invenzione delle prime bilance
a piatti. L'uso di contenitori graduati consentiva di misurare facilmente le capacità, in
modo simile alle lunghezze. Per i pesi si arrivò a sistemi di misura simili con
l'invenzione delle bilance a molla. Il tempo è una grandezza fisica del tutto particolare,
che per lungo tempo non è stata facile da misurare, se non relativamente a unità
particolari: i giorni, gli anni, le "lune", …; si svilupparono abbastanza presto alcuni
strumenti per misurare intervalli di tempo brevi (bastati sul consumo di candele, sullo
svuotamento di contenitori, …), ma non era chiaro, come nel caso delle precedenti
grandezze fisiche, il legame tra i vari campioni di misura usati e la grandezza stessa.
Questo, le difficoltà tecniche nella costruzione di misuratori del tempo (fondamentale fu
al riguardo la scoperta, attribuibile a Galileo, della periodicità del pendolo), la possibilità
di pensare ad intervalli di tempo piccoli a piacere, … sono aspetti che hanno fatto del
tempo la grandezza fisica che meglio si avvicina all'idea dei numeri reali.
Difficoltà matematiche particolari è stato necessario affrontare per sviluppare le
misure delle aree e dei volumi. La misura dei secondi, per migliaia di anni, è stata
affrontata solo come misura di capacità, la misura dei primi è stata oggetto di molti
fraintendimenti (ad esempio la misura di estensioni di terreno a forma di
parallelogramma moltiplicando i lati invece che un lato e l'altezza ad esso
perpendicolare).
Sulle aree ci siamo già soffermati, vedendone l'intreccio con la moltiplicazione tra
numeri reali (
area) e alcune generalizzazioni allo spazio
tridimensionale (
rappresentazioni cartografiche). Occupiamoci, ora, deivolumi.
In modo analogo a quanto visto per
l'area dei rettangoli, il volume di
un parallelepipedo è ottenuto
moltiplicandone le tre dimensioni: nel caso
raffigurato a fianco, supponendo che le
misure siano espresse in centimetri, possiamo
dire che il volume è approssimato per difetto
da 3·2·2 cm3 = 12 cm3. In analogia a quanto
visto per le aree, non possiamo, tuttavia, dire
che 13 cm3è una misura per eccesso; senza
altre misurazioni potremmo solo concludere
che il volume è inferiore a 4·3·3 cm3 = 36
cm3, ossia che l'indeterminazione è 24 cm3.
Se misuriamo le dimensioni con più
precisione possiamo concludere che il
volume è approssimato per difetto
da 3.6·2.1·2.2 cm3 = 16.632 cm3 =16 632
mm3; una sua approssimazione per eccesso
è3.7·2.2·2.3 cm3 = 18.722 cm3 = 18 722
mm3, ossia l'indeterminazione è 2.090 cm3.
Il prodotto di due dimensioni può essere interpretato come l'area A di una delle facce e la
terza dimensione, pensando il parallelepipedo appoggiato su tale faccia, può essere
interpretata come l'altezza h del parallelepipedo stesso, e il volume di esso può essere
rappresentato come A·h.
Nel caso dei cilindri e di tutti i solidi ottenuti muovendo una figura piana
perpendicolarmente al piano in cui essa sta, il volume V, generalizzando quanto visto per i
parallelepipedi, lo si ottiene moltiplicando l'area A delle figura piana per la distanza h che
essa ha percorso: V = A·h.
In analogia a quanto visto
per la
area dei
parallelogrammi, abbiamo il
cosiddetto principio
diCavalieri (dovuto a
Bonaventura Francesco
Cavalieri 1598-1647) secondo il
quale il volume di un solido non
cambia se lo sezioniamo con un
fascio di piani tra loro paralleli
e, a partire dal primo piano che
lo taglia, ne spostiamo via via le
sezioni con un movimento
continuo. Lo accettiamo senza
darne una dimostrazione: non
abbiamo, ora, gli strumenti per
farlo. Nel caso della figura
solida raffigurata a sinistra
abbiamo che il suo volume è
pari a quello del parallelepipedo
che ha la stessa base e la stessa
altezza. Nel caso raffigurato a
destra abbiamo piramidi di
uguale base ed uguale altezza,
che per lo stesso principio
hanno il medesimo volume,
così come i coni con le stesse
caratteristiche.
Sappiamo che (
area) tra area di un rettangolo ed
area di un triangolo che ha base ed altezza in comune
N=1000
con esso c'è rapporto costante, pari a 2. Si può
dimostrare che, passando al caso tridimensionale,
R=2.7777
anche il rapporto tra volume di un prisma e volume
N=2000 R=2.8653
di una piramide con base ed altezza in comune con
esso è costante, e vale 3. Se vuoi, prova a
N=3000 R=2.8116
dimostrarlo. A destra trovi gli esiti di un programma
N=4000 R=2.8673
che genera a caso N punti nel prisma a base
triangolare raffigurato a sinistra e calcola il rapporto N=5000 R=2.8818
R tra N e quanti cadono nella piramide
N=6000 R=2.9239
raffigurata:
qui puoi esaminare il programma.
Dunque, per quanto considerato sopra, il volume di una piramide o di un cono di area di
base A ed altezza h è pari a A·h / 3.
Per il principio di Cavalieri, una semisfera
ha lo stesso volume di un cilindro alto come il
raggio e avente come base il cerchio massimo
della semisfera dal quale sia stato tolto un
cono con stessa base e stessa altezza (vedi
figura a sinistra): se prendo il raggio unitario,
osservo che alla quota h la sezione della sfera
è un cerchio di raggio √(1−h2) e quella di
"cilindro−cono" è un cerchio di raggio 1 da
cui ne è stato tolto uno di raggio h, ed
entrambe le figure hanno area pari
a π(1−h2).
Qui puoi vedere
un'animazione che illustra il fenomeno.
Dunque il volume di una sfera di raggio 1 è il doppio di π−π/3 = 4/3·π, e quello di una
sfera di raggio r è 4/3·π·r3 (
diagrammi).
Posso trovare il volume della sfera anche con un
ragionamento diverso. Approssimo una sfera con
l'unione di tante piramidi, come illustrato nella figura a
fianco; al crescere del numero di queste piramidi, e al
decrescere della loro area di base, il volume di questa
unione tende al volume della sfera. Il volume di
ciascuna di queste piramidi è pari ad un terzo della
superficie di base moltiplicata per l'altezza; questa
tende a coincidere con il raggio r della sfera, mentre la
somma delle superfici di base tende a coincidere con la
superficie totale della sfera, che so calcolare.
Quindi il volume della sfera
è Superficie·r/3 = 4·π·r2·r/3 =4/3·π·r3.
Ricordiamo, infine, un po' di terminologia. Il cilindro che racchiude
una sfera, ossia che, pensato appoggiato su uno dei due cerchi che lo
delimitano, ha altezza pari al diametro, viene chiamato cilindro
equilatero. Generalizzando quanto già detto per i
poligoni (
area) viene chiamata apotema di un cono circolare retto,
ossia frutto della rotazione di un triangolo rettangolo attorno ad uno dei
cateti, la lunghezza dell'ipotenusa di questo triangolo, e di una piramide
retta, ossia che circoscrive un cono circolare retto (la base è un poligono
che circoscrive una circonferenza e la proiezione del vertice sulla base
coincide col centro di essa), l'apotema di questo.
Viene, infine, chiamato diedro ciascuna delle due parti in cui lo spazio viene
diviso da due semipiani (facce) delimitati dalla stessa retta (spigolo). Come
ampiezza del diedro viene presa quella dell'angolo che si ottiene sezionando il
diedro stesso con un piano perpendicolare allo spigolo. Nella figura a lato il
diedro è colorato in verde e la sua ampiezza è indicata α. Ricordiamo che viene
chiamato bisettore di un diedro il piano che passa per il suo spigolo e che lo
taglia in due diedri di eguale ampiezza.
Il volume di altri solidi può essere ottenuto, se hanno solo facce piane,
scomponendoli in piramidi, altrimenti con tecniche simili a quelle usate per la
sfera, che saranno discusse più avanti (
altri usi degli integrali), quando si
sarà stato introdotto un nuovo argomento: gli integrali.
Nel piano cartesiano è dato un triangolo di vertici (1,0), (0,3), (3,0).
Qual è il volume del solido che si ottiene facendo ruotare il triangolo intorno all’asse y?
(A) 8π
(B) 12π
(C) 16π
(D) 24π
π323/3 − π123/3 = π(323 − 3)/3 = π(32 − 1) = 8π
Trova il volume dello spazio libero all'interno di un cilindro di altezza 2R e raggio R al cui
interno è collocata una sfera di raggio R.
Il cilindro ha volume πR2·2R = 2πR3. La sfera ha volume 4/3·πR3. Lo spazio libero è la
differenza tra questi due valori, ossia 2/3·πR3.
Il valor medio
Se conosco come varia la velocità v di un'automobile in un intervallo di tempo [a,b], che cosa intendo pervelocità
media: la velocità costante a cui sarebbe andata per percorrere la strada nello stesso tempo. Quindi il suo valore lo
trovo dividendo la strada percorsa per il tempo impiegato.
La strada percorsa, ossia la differenza s(b)−s(a) tra la
posizione finale e la posizione inziale (per il teorema
fondamentale del calcolo[
integrazione] essendo v(t) =
s'(t)) è data da
∫
[a,b] v(t)
dt.
∫
Quindi: velocità media = [a,b] v(t) dt / (b-a).
Passando da v a una generica funzione f continua positiva
su [a,b], definiamo come valore medio di f in [a,b]
l'altezza m del rettangolo di base [a,b] avente area uguale a
quella compresa tra il grafico di f e l'intervallo [a,b].
Più in generale, se f è una qualunque funzione integrabile
su [a,b], definiamo come valore medio di f in [a,b] il valore
della funzione costante che ha su [a,b] lo stesso integrale,
ossia:
∫
[a,b] f
m = ———
b–a
Si ha, facilmente, che vale un teorema del valor medio per gli integrali:
se f è continua su [a,b], esiste c in [a,b] in cui f assume il valore medio, ossia tale che:
f(c) = ∫[a,b] f / (b-a).
Nel caso della figura soprastante, vi sono tre di tali c: le ascisse dei punti in cui il
grafico di f taglia la retta di ordinata m.
Il teorema del valor medio per le derivate (
propr. delle funzioni cont. e di quelle
derivabili), applicato a una funzione integrale di f, mi avrebbe dato gli stessi punti. Nel
caso della velocità, un istante c in cui essa assume il valor medio (rispetto alla
integrazione) è anche un istante in cui s ha come derivata (s(b)−s(a)) / (b−a).
Esercizio 1 (e soluzione)
Esercizio 2 (e soluzione)
Il volume
Generalizziamo alcuni metodi già visti (
il volume) per individuare il volume di una
figura tridimensionale. Il particolare ci occuperemo delle figure che possono essere
generate mediante la rotazione attorno ad un asse di una fugura piana. Illustriamo le
"tecniche" impiegabili partendo da un caso in cui sappiamo determinare il volume anche
con altri metodi.
• Determino il volume del solido raffigurato a lato, dotato di
un asse di simmetria, con la superficie "interna" cilinidrica di
raggio uguale all'altezza, una faccia a forma di corona circolare
e il resto della superficie a profilo rettilineo, inclinato di 45°
rispetto all'asse di simmetria (i semipiani aventi come bordo
l'asse di simmetria intercettano sul solido dei triangoli
rettangoli isosceli). L (la lunghezza dei cateti del triangolo T) è
sia lo spessore della corona circolare che l'altezza e il raggio
del cilindro.
Suppongo che L = 1, ossia uso come unità di volume L3.
Posso pensare il solido come un cono circolare retto di altezza
e raggio 2 da cui ho tolto un cono di altezza e raggio 1 e un
cilindro circolare retto di altezza e raggio 1. Ottengo: 4π2/3π/3-π = 4π/3 (ossia 4π/3L3).
• Ora ricavo il
volume usando
direttamente
qualche tecnica
di integrazione.
Dovrei ottenere
lo stesso
risultato.
Penso il
solido come
frutto della
rotazione di una
figura attorno
all'asse di
simmetria.
Nel mio caso
posso pensare il
profilo della
figura
− sia come
grafico di una
funzione F
assumendo
l'asse di
rotazione come
asse y
− che come
quello di una
funzione G
assumendo
l'asse di di
rotazione come
asse x.
Col secondo
metodo (figura
a sinistra)penso
il solido come
somma di tanti
anelli (rondelle)
di spessore Δx,
raggio esterno
G(x) e interno 1:
la variazione ΔV del volume al passare da x a x+Δx è approssimabile con π(G(x)2-1) (area della corona circolare base
dell'anello) per Δx: dV = π(G(x)2−1) dx. G(x) = 2−x. Dato che x varia in I = [0,1], il volume èV =
∫Iπ(3+x2)dx = π(3x+x3/3)x=1 = π(3+1/3) = 4π/3.
Col primo metodo (figura a destra) penso il solido come somma di cilindretti cavi (gusci cilindrici) di spessore Δx,
raggio interno x e altezza F(x):
la variazione ΔV del volume al passare da x a x+Δx è approssimabile con F(x)Δx (area del rettangolino dalla cui
rotazione ottengo il cilindretto cavo) per 2πx (circonferenza del cilindretto): dV = 2πxF(x)dx. F(x) = 2−x(in questo
caso particolare F(x)=G(x)). Dato che x varia in I = [1,2], il volume è V = ∫I 2π(2x-x2)dx =2π((x2−x3/3)x=2 −
(x2−x3/3)x=1) = 2π(3−7/3) = 4π/3.
Vediamo altri due esempi. Determiniamo il volume di una sfera in modo
alternativo rispetto a quanto già visto (
il volume). Possiamo limitarci al
caso in cui il raggio sia 1: moltiplicando per R3 il volume così ottenuto
otterremo quello di una sfera di raggio R. Penso la sfera come unione di dischi
di spessore infinitesimo dx e raggio f(x) = √(1−x2), di
volume π f(x)2dx = π(1−x)2dx. Sommando il volume dei dischi ottengo:
∫
∫
π f(x)2 dx = [−1, 1] π(1−x)2dx = π ( [x−x3/3] x=1 − [x−x3/3] x=−1 ) = 4π/3.
In pratica, questo metodo dei dischi non è che un caso particolare del metodo
delle rondelle.
[−1, 1]
Vediamo, ora, come ottenere il volume del solido a fianco (una specie
di bicchiere), ottenuto ruotando attorno all'asse y la regione compresa tra
y = 2x e y = x2 per x in [0, 2].
Potrei procedere come sopra, pensando il solido affettato
orizzontalmente, come composto da tante rondelle. Procediamo, invece,
pensandolo come composto da tanti gusci cilindrici di raggio x,
altezza 2x−x2 e spessore dx. "Sommando" il volume dei cilindri ottengo:
∫
[0, 2]
2πx (2x−x2) dx = 2π
∫
[0, 2]
2x2−x3 dx = 32π/3−8π = 8π/3.
Esercizio (e soluzione)
Lunghezza di un arco di curva
Abbiamo già visto (
lunghezza) come valutare la lunghezza del grafico di una
funzione f continua definita su un intervallo chiuso e limitato [a, b]; abbiamo anche visto
come, in particolari situazioni, questa lunghezza può essere infinita. Consideriamo, ora,
il caso particolare in cui f sia anche derivabile in [a, b], nel senso che ne esistano la
derivata in (a, b) e le derivate sinistra e detra in a e in b [
propr. delle funz. continue e
derivabili]. Suddividiamo [a, b] in n sottointervalli [x0, x1], [x1, x2], …, [xn−1, xn] dove a
= x0 < x1 < … < xn−1 < xn = b.
La poligonale che ne risulta approssima la nostra curva. Determiniamone la lughezza.
Il k-esimo segmento è l'ipotenusa di un triangolo di base Δxk ed altezza f(xk)−f(xk−1), e
quindi è lungo:
Lk = √( Δxk2 + ( f(xk) − f(xk−1) )2 ) =
√( 1 + ( ( f(xk) − f(xk−1) ) / Δxk) ) Δxk
Quindi (per il teorema del valor medio delle derivate:
derivabili) esiste almeno un xk* in (xk−1, xk) tale che:
2
propr. funz, continue e funz.
Lk = √( 1 + f '(xk*)2 ) Δxk
Allora, aumentando n, ∑k = 1..n √( 1 + f '(xk*)2 ) Δxk, per quanto abbiamo già
visto (
integrazione), converge a:
∫ [a, b] √( 1 + f '(x)2 ) dx
che assumiamo come lunghezza L del nostro arco di curva.
Esempio.
Calcoliamo la lunghezza del grafico di x → x3/2, ovvero di x → √x3, per x tra 0 ed
1. D(√x3)(x) = 3√x/2. Quindi:
∫ [0, 1] √(1+(3√x/2)2) dx = ∫ [0, 1] √(1+9x/4) dx =
8/27·([(1+9x/4)3/2]x=1 − [(1+9x/4)3/2]x=0) =
8/27·((13/4)3/2−1) = 1.4397…
Controllo
con Poligon:
Con
R:
G(x) = SQR(1+(3*SQR(x)/2)^2) [0,1] G INT =
1.439709873 8/27*((13/4)^1.5-1) =
1.4397098733716 OK
G <- function(x) sqrt(1+(3*sqrt(x)/2)^2)
integrate(G,0,1)
1.43971 with absolute error < 1.6e-14
8/27*((13/4)^1.5-1)
1.43971
Caricando la libreria "codetools" col comando "showTree" posso ottenere un arrotondamento a 15 cifre
(occorre tener conto degli eventuali errori di arrotondamento)
library(codetools)
showTree(8/27*((13/4)^1.5-1))
1.43970987337155
# se vuoi avere più cifre anche del valore
calcolato da integrare:
showTree(integrate(G,0,1)$value)
1.43970987337155
Esercizio (e soluzione)
altri collegamenti
[nuova pagina]
piu esercizi relativi
I numeri complessi
Dai vettori ai numeri complessi
Alla voce
vettori abbiamo introdotto l'uso delle coppie di numeri per descrivere
traslazioni, dopo che le avevamo già impiegate per descrivere punti
dello
spazio bidimensionale (piano cartesiano). Abbia introdotto anche una
operazione di addizione tra tali coppie, per rappresentare la composizione di due
traslazioni. Abbiamo poi introdotto la differenza tra coppie di numeri: le figure seguenti
ricordano come la differenza (4,1) – (1,3) = (4-1, 1-3) = (3, -2) che rappresenta il vettore
AB può essere interpretata sia come differenza tra i punti B e A, sia come differenza tra i
vettori OB e OA (il vettore AB è quanto devo aggiungere al vettore OA per ottenere il
vettore OB).
La traslazione di una figura con passi Δx = 3, Δy = -2 può essere descritta come la
applicazione della funzione (x,y) (x,y) + (3,-2) = (x+3, y-2) a tutti i suoi punti. Alla
voce
trasformazioni geometriche abbiamo visto come descrivere analogamente
alcune particolari rotazioni attorno all'origine:
– il pesce della figura (A) seguente diventa il pesce di (B) mediante una rotazione di 90°
(π/2) describile come(x,y) (-y, x)
– il pesce (A) diventa il pesce (C) mediante una rotazione di 180° (π) describile
come (x,y) (-x,-y)
– il pesce (A) diventa il pesce (D) mediante una rotazione di 270° (3π/2), o -90°,
describile come (x,y) (y,-x)
(-10, 7)
(-7, -10)
(10, -7)
oltre che simmetrie rispetto all'asse x e all'asse y e trasformazioni di scala,
come quella raffigurata a lato:
– si è ottenuto il pesce (E) mediante una trasformazione di scala monometrica
(odomotetia di centro O) di fattore 2 describile come (x,y)
2(x,
y) = (2x,2y)(moltiplicazione di (x,y) per il numero reale 2:
direzioni e
funz. circolari)
Per semplificare la descrizione sia dei punti che delle trasformazioni
geometriche (evitando l'uso delle parentesi e delle virgole) e, come vedremo,
per trovare un modo semplice per descrivere anche le rotazioni di ampiezza
diversa rispetto ai multipli di 90°, si introduce il seguente "trucco", che
descriviamo riferendoci alla figura sotto a destra:
– posso pensare il punto P = (3,2), cioè il vettore OP, come somma
del vettore (3,0) (il vettore di modulo 3 diretto come l'asse x) e del
vettore (0,2) (di modulo 2 diretto come l'asse y): (3,2) = (3,0) +
(0,2).
– abbreviando, scrivo 3 al posto di (3,0) e, indicando
i
con
il
versore verticale, cioè il vettore (0,1), scrivo 2i al
posto di (0,2); posso dunque scrivere: (3,2) = 3 + 2 i.
In pratica descrivo la coppia come se fosse un termine numerico
dato dalla somma di un numero reale (3) e il prodotto (2i) di un
numero per il simbolo di costante i, che posso pensare come l'unità
di misura degli spostamenti sull'asse verticale.
i
, in quanto simbolo di costante "inventato", che non corrisponde a
un usuale numero, viene chiamato unità immaginaria, e le
espressioni del tipo x + i y, somma di un numero reale e di un
numero reale "moltiplicato per i", vengono dette numeri complessi.
L'espressione "numeri reali" è stata introdotta dopo l'invenzione
dell'uso di i, per precisare che si tratta di numeri usuali in cui non
compare l'unità immaginaria.
Quando si usano rappresentazioni grafiche come quelle illustrate
sopra e a sinistra, gli assi delle ascisse e delle ordinate vengono
chiamati anche asse realee asse immaginario. E, dato il numero
complesso, x + i y, a cui corrisponde il punto (x,y), x viene detta
sua parte reale e y sua parte immaginaria. In simboli: x = Re(x
+ i y), y = Im(x + i y).
Sopra sono rappresentati vari numeri complessi. Tra questi vi è anche un numero con
parte reale nulla (-2i, rappresentato da un vettore verticale) e uno con parte immaginaria
nulla (-1, rappresentato da un vettore orizzontale), ossia un numero complesso che è
anche un numero reale. Con le convenzioni usuali, -2-2i sta per -2+(-2)i, ossia ha -2
come parte immaginaria.
Le operazioni tra numeri complessi
L'insieme dei numeri complessi viene indicato con o con C. Ad esso si possono
estendere l'addizione e la moltiplicazione di R in modo che si mantengano le proprietà
illustrate alla voce
termini equivalenti.
L'addizione non è altro che quella tra vettori: (4 + 6 i) + (2 + 3 i) diventa la somma dei
vettori rappresentati da 4, da 6i, da 2 e da 3i, che posso riordinare come voglio, per cui
posso ottenere:
(4 + 6 i) + (2 + 3 i) = 4+2 + (6i+3i) = 6 + 9i.
Nel trasformare 6i+3i in 9i ho usato un'altra proprietà dei vettori: dato il vettore
(a,b) ho che 6(a,b)+3(a,b) = (6a,6b)+(3a,3b) = (6a+3a,6b+3b) = (9a,9b) = 9(a,b); nel
nostro caso il vettore (a,b) è i = (0,1).
Effettuando la moltiplicazione tra due generici numeri complessi in modo che valga la
proprietà distributiva abbiamo, ad es.:
(7 + 10 i) · (4 + 3 i) = 7·4 + 10·4 i + 7·3 i + 10·3 i·i = 28 + 61 i + 30 i·i.
Per completare il calcolo trasformando il risultato in una espressione del
tipo x+iy dobbiamo stabilire quanto fa i·i.
L'addizione tra complessi è interpretabile come una composizione di traslazioni,
una moltiplicazione di un complesso per un numero reale è interpretabile come una
omotetia; proviamo a interpretare geometricamente la moltiplicazione per i:
• 1 per i sappiamo che fa i; quindi il "vettore 1" è stato ruotato di 90°
• -1 per i sappiamo che fa -i; quindi il "vettore -1" è stato ruotato di 90°
Definiamo in modo analogo "i per i": i, ossia (0,1), ruotato di 90° diventa il
vettore(-1,0), che abbiamo rappresentato col numero complesso -1.
Posto
i·i = -1
la moltiplicazione precedente diventa:
(7 + 10 i) · (4 + 3 i) = 28 + 61 i + 30(-1) = -2 + 61 i
Indichiamo con z un generico numero complesso e con x e y le sue parti reale e
immaginaria(z = x+i y). La figura sotto a sinistra illustra la interpertazione geometrica delle
trasformazioniz
z+( 4 +3 i) e z
z· ( 4 +3 i) .
•z
+
•z
·
z
(4 +3 i) , in quanto (x+iy)+(4+3i) =
x+4 +( y+3)i, trasforma ogni punto (x,y) in
(x+4,y+3): è la traslazione di vettore (4,3) che
trasforma il quadrato F nel quadrato F1;
z (4 +3 i) trasforma i punti del segmento
OA nei punti del segmento OP; infatti O = 0+0i
rimane invariato, A = 1+0i diventa 4+3i, ossia P; il
punto medio di OA, ossia 0.5+0i, diventa 4/2+3/2i,
cioè (4/2,3/2) che è il punto medio di OP, e così via.
Facendo i calcoli in generale si ottiene:
z · (4 +3 i) = (4 x -3 y) + (4 y+3 x) i ;
quindi B = (1,1) diventa Q = (1,7), C = (0,1) diventa
R = (-3,4); è facile verificare che il poligono OPQR è
un quadrato: è il quadrato F2che si ottiene da F
mediante la stessa rotazione attorno ad O e la
stessaomotetia (trasformazione di scala monometrica)
che trasformano il versore OA dell'asse reale (il
numero 1) nel vettore OP (il numero 4+3i).
In sintesi, addizioni e moltiplicazioni tra numeri complessi si eseguono operando
sulle espressioni che li rappresentano come si fa tra i numeri reali, a patto di operare la
sostituzione di i 2 con -1. E si ha che l'addizione di a+ib a x+iy trasla il vettore (x,y)
con passi Δx=a e Δy=b e la moltiplicazione di x+iy per a+ibtrasforma (x,y) con la
stessa "roto-omotetia" che trasforma il vettore (1,0) in (a,b): alla direzione di (x,y)
viene addizionata la direzione di (a,b), il modulo di (x,y) viene moltiplicato per il
modulo di (a,b).
Viene chiamato modulo di a+ib, e indicato |a+ib|, il modulo del vettore (a,b), ossia
√(a2+b2). Ad es. |4+3i| = √(16+9) = 5: è la lunghezza del segmento OP della figura
precedente (ed è il fattore di scala dell'ingrandimento eseguito da z z·(4+3i)).
La direzione del vettore (a,b) viene invece chiamata anomalia o argomento di a+ib .
Ad es. l'argomento di 4+3i è la direzione del vettore (4,3), ossia la direzione compresa
tra 0° e 90° che ha come pendenza 3/4 = 0.75; per trovarne il valore posso usare ad es.
una calcolatrice:
0.75
fornisce 0.64350… = 36.869…°: è la direzione del
segmento OP della figura precedente (ed è l'ampiezza della rotazione eseguita
da z z·(4+3i)).
Osserviamo che, se z è reale, |z| inteso come
valore assoluto o
2
2
2
come modulo coincidono in quanto√(x +0 ) = √(x ) = |x|. Del resto il modulo di OP
indica la distanza di P da O, e, se P sta sull'asse x, questa non è altro che il valore
assoluto dell'ascissa di P.
Per calcolare le divisioni tra numeri complessi basta che stabiliamo, dato z
= x+iy, quanto vale il
reciproco 1/z. Infatti la divisione per z la possiamo
interpretare come una moltiplicazione per 1/z.
Dobbiamo, dunque, trovare a+ib tale che (a+ib)(x+iy)=1, ossia tale che:
ax-by + i(ay+bx) = 1, ossia: ax-by=1 & ay+bx=0
È un sistema di equazioni con incognite a e b che posso risolvere ad es. così:
a = - b x / y & ( - b x 2/y - b y ) = 1
a = - b x / y & b ( x 2+y2)/ y = - 1
b = - y / ( x 2+y2) & a = x / ( x 2+y2) Quindi:
1/z = 1/(x+iy) = (x-iy)/(x 2+y2).
Un modo più veloce (basato su
) per ottenere lo stesso risultato è il seguente:
1
———
x+iy
=
x-iy
——————
=
x-iy
———
2
(x+iy)(x-iy)
2 2
x -i y
=
x-iy
———
x2 + y2
Quanto trovato è in accordo con l'interpretazione vettoriale del prodotto,
secondo la quale z e 1/z hanno 1 come prodotto se: • il prodotto dei loro moduli
è pari al modulo di 1, che è 1, e se • la somma dei loro argomenti è pari
all'argomento di 1, che è 0. Infatti:
– il modulo di (x-iy)/(x 2+y2) è il modulo di x-iy diviso x2+y2;
– i moduli di x-iy e di x+iy sono uguali per simmetria rispetto all'asse y;
– x2+y2 non è altro che il quadrato di questi moduli
– e quindi il modulo di x+iy per quello di (x-iy)/(x2+y2) fa 1.
Inoltre:
– (x-iy)/(x 2+y2) ha la direzione di x-iy ;
– le direzioni di x-iy e di x+iy sono opposte per simmetria rispetto all'asse y;
– e quindi la direzione di x+iy più quella di (x-iy)/(x2+y2) fa 0.
Esempio: calcolo di (-2 + 61 i) / (4 + 3 i). Potremmo usare la "formula" vista sopra, ma
procediamo direttamente:
-2 + 61 i
————
4+3i
(-2 + 61 i)(4 - 3 i)
=
——————
(4 + 3 i)(4 - 3 i)
175 + 250 i
=
————
= 7 + 10 i
4 2 + 32
Le coordinate polari
Un vettore può essere individuato indicandone le componenti oppure indicandone
direzione e modulo. Analogamente un numero complesso può essere individuato
indicandone le parti reali e immaginaria oppure indicandone argomento e modulo. E
tutto ciò è analogo alla possibilità di individuare un punto del piano mediante le sue
coordinate cartesiane oppure mediante le sue
coordinate polari. Queste sono
comode, oltre che per rappresentare fenomeni, per descrivere figure.
Ad es., usando ρ (lettera greca "ro")
e θ (lettera greca "teta") per rappresentare
rispettivamente la distanza da O e la
direzione, il disco forato (corona
circolare) illustrato a fianco, che in
coordinate cartesiane è rappresentabile
con4 ≤ x2+y2 ≤ 16, e che usando la
variabile complessa z (=x +i y ) può essere
descritta con 2 ≤ |z| ≤ 4, usando le
coordinate polari diventa 2 ≤ ρ ≤ 4: è la
figura compresa tra i cerchi ρ=2 e ρ=4.
Sono facilmente descrivibili
le spirali [se n'è visto un esempio alla
voce
tangenti e curve]. Quella
raffigurata a destra è ρ = θ (per θ=0 ho
ρ=0: sono nell'origine; al crescere di θ,
ossia ruotando, ρ, ossia la distanza da O,
cresce; per θ=2π ho compiuto un giro e
sono a distanza 2π da O; per θ=4π ho
compiuto un secondo giro e sono a
distanza doppia da O; …).
La disequazione 135° ≤ θ ≤ 225° invece rappresenta un angolo. In forma cartesiana lo avremmo descritto con il
sistema: x ≤ 0 & h· x ≤ y ≤ k· x con h = tan(225°) e k = tan(135°).
ρ varia sui numeri reali non negativi, mentre θ varia su tutti i numeri reali.
Naturalmente due numeri θ1 e θ2 che differiscono di 2π (360°) sono da intendersi diversi come numeri
ma
uguali come direzioni.
In alcuni casi si restringe θ a variare in [0,2π), cioè [0,360°), o in (-π,π], cioè (-180°,180°]. In questi casi le eventuali
operazioni tra direzioni vengono interpretate
in modo opportuno.
Le coordinate polari ρ e θ vengono chiamate spesso, rispettivamente, raggio
vettore e anomalia (come viene spesso chiamato anche l'argomento del
corrispondente numero complesso). L'origine del sistema di riferimento viene
chiamatapolo. Il termine anomalia deriva dall'aggettivo "anomalo" (strano,
irregolare). Infatti tra i primi usi delle coordinate polari vi fu quello della
descrizione del moto dei pianeti intorno al sole e la scoperta che la direzione del
vettore Sole-Pianeta (ossia della anomalia) non variasse proporzionalmente al
tempo (i pianeti descrivono un'orbita ellittica e "ruotano" più velocemente
quando sono vicini al sole) era stata considerata una cosa "strana" rispetto
all'idea allora predominante che i pianeti ruotassero attorno al sole in modo
uniforme (ossia con il vettore Sole-Pianeta che varia direzione
proporzionalmente al tempo).
Se indichiamo con x, y, ρ, θ e con xn, yn, ρn, θn rispettivamente le parti reale e
immaginaria, il modulo e l'argomento del numeri complessi z e zn, possiamo scrivere:
se z = z1· z2, ρ = ρ1· ρ2 e θ = θ1+ θ2;
se z = 1 / z1, ρ = 1 / ρ1 e θ = –θ1;
se z = z1/ z2, ρ = ρ1/ ρ2 e θ = θ1– θ2.
Naturalmente, ρ = |z|. Se la direzione di z viene espressa con un numero θ tale
che 0≤θ<2π, tale numero viene indicato con Arg(z) e chiamato argomento pricipale di
z. A volte si ricorre a una convenzione diversa: si assume come Arg(z) tra i possibili
argomenti di z (ossia tra i numeri con cui se ne può esprimere la direzione) quello che
cade in (-π,π]. A 0 non è assegnato un argomento principale (il vettore nullo non è
caratterizzabile con una particolare direzione: se si pone ρ=0, per qualunque θ risulta
individuato il punto (0,0): se parto da O con una qualunque direzione ed eseguo uno
spostamento nullo, rimango in O).
A lato è illustrato come
le
funzioni
circolarimettono in relazione
parti reale e immaginaria
(coordinate cartesiane) con
modulo ed argomento
(coordinate polari).
Mentre da ρ e θ a x e y si
passa con la diretta applicazione
di due formule, e lo stesso
accade per il passaggio da x e y
a ρ, per determinare θ occorre
tener conto che la direzione con
pendenza y/x fornita
daarctan (così, o atan o atn, è
indicata la funzione inversa
della funzione
tangente, tan, che nelle
calcolatrici in genere
corrisponde
x=ρ c os(θ) y=ρ s in(θ)
ρ=√(x2+y2) tan(θ)=y/x
a
) potrebbe
differire di 180° dal valore
corretto: il valore fornito è
sempre compreso tra -π/2 e π/2,
per cui se x<0 occorre
aggiungere π:
• nel caso di 2+5i (figura A), ρ = √(4+25) = √29 =
5.3851…, θ = atan(5/2) = atan(2.5) = 1.1902… = 68.198…°
• nel caso di -3+2i (figura B), ρ = √(9+4) = √13 = 5.3851…, θ0 = atan(-2/3) = 0.588002… = -33.690…°, che non è l'argomento di -3+2i, in quanto dovrebbe essere una
direzione del 2° quadrante: dobbiamo aggiungere π:θ = -0.588002…+π = (33.690…+180)° = 146.310°
Se x = 0, non si può calcolare arctan(y/x). Ovviamente si ha: θ = π/2 quando y > 0, θ =
3π/2 (o -π/2) quando y < 0.
Nota 1. Le scritture arctan(x), atan(x) e atn(x) sono abbreviazioni
di arcotangente di x (la direzione o angolo compreso tra -π/2 e π/2 che ha come
tangente x). La parte "arco" della parola deriva dal fatto che, come è spiegato
alla voce direzioni e funz. circolari, direzioni e angoli sono "quantificati"
interpretandoli come lunghezze di archi di cerchio. In modo simile sono
chiamate le funzioni inverse di seno e coseno ("arcoseno", "arcocoseno").
Nota 2. Tra i programmi (per ambiente Windows) inclusi negli Oggetti
Matematici puoi trovare una calcolatrice per numeri complessi. Puoi accedervi
direttamente cliccando
qui. Per qualche esempio d'uso clicca qui.
Numeri complessi, figure e loro trasformazioni
L'uso dei numeri complessi consente di
descrivere in modo compatto diversi tipi
di figure. Ad es. il
cerchio di centro C =
(3,1) e raggio 2 può essere descritto dalla
equazione |z-3-i|=2con la "variabile
complessa" z = x + i y , che traduce la
condizione che il punto P = (x,y) abbia
distanza 2 da C, ovvero che il vettore CP
abbia modulo 2. L'equazione |z+1-2i|=|z 1 .5-3 i |rappresenta invece
l'asse del
segmento di estremi (-1, 2) e (1.5, 3).
Abbiamo visto
che le trasformazioni geometriche tra
figure piane possono essere descritte invece che come
funzioni (x,y)
(x',y') da coppie di numeri reali a coppie di
numeri reali anche come funzioni z
z' da numeri complessi a
numeri complessi. A sinistra è illustrata la traformazione del
rettangolo A mediante una funzione F ottenuta
componendo z
z·(1 +2 i) (la rotoomotetia che trasforma il
versore dell'asse x nel vettore (1,2), e quindi i lati orizzontali di A,
lunghi 2, in segmenti diretti e lunghi come il vettore (2,4))
ez
z + 1.5 +3 i (la traslazione di passi 1.5 e 3). Più in generale
tutte le
similitudini possono essere descritte come funzioni di
variabile complessa del tipo z
z·z1+z2
Dato z = x + i y , si pone
= x - i y . È il numero che si
ottiene cambiando segno alla parte immaginaria di z; viene
chiamato il coniugato di z. Geometricamente, z
è
la simmetria rispetto all'asse x (la trasformazione in forma polare
è: ρ' = ρ, θ' = -θ).
Invece z
- z = - x - i y è la simmetria rispetto a (0,0) (in
forma polare è: ρ' = ρ, θ' = θ+180°)..
Le rotazioni attorno ad O sono un caso particolare delle
trasformazioni richiamate nel punto precedente: sono describibili
come funzioni z
z · z 1dove z1 è un numero complesso di
modulo 1, ossia un numero complesso che rappresenta un versore.
Se voglio ruotare con ampiezza α moltiplico per il numero che
rappresenta il versore di direzione α, ossia per
cos(α) + i
sin(α).
Usando le coordinate cartesiane questa trasformazione diventa:
(x, y)
( x· c os(α) - y · sin(α), x ·sin(α) +y ·c os(α) ) , infatti:
z · (cos(α) + i sin(α)) = (x + i y )(cos(α) + i s in(α)) = x cos(α) - y sin(α) + i (x sin(α) + y cos(α))
Non è una formula da imparare a memoria: la si ricava facilmente nel modo appena illustrato.
Nota. La relazione tra moltiplicazioni per un numeri complessi e rotazioni
attorno ad O ci consente di ricavare facilmente alcune formule spesso utili
quando si opera con funzioni circolari. Siano u e v due numeri complessi di
modulo 1 e siano α e β i loro argomenti, ossia siano u = cos(α) + i sin(α) e v =
cos(β) + i sin(β). Allora:
u·v = (cos(α) + i sin(α))·(cos(β) + i sin(β)) = cos(α)·cos(β)
+ i·(sin(α)·cos(β)+sin(β)·cos(α)) + i2·sin(α)·sin(β) =cos(α)·cos(β)-sin(α)·sin(β)
+ i·(sin(α)·cos(β)+sin(β)·cos(α)).
D'altra parte u·v ha come argomento la somma degli argomenti di u e v, ossia:
u·v = cos(α+β) + i·sin(α+β). Se ne deduce che:
cos(α+β) = cos(α)·cos(β) – sin(α)·sin(β), sin(α+β) = sin(α)·cos(β) +
sin(β)·cos(α).
[cliccando qui ottieni una figura che suggerisce una dimostrazione alternativa
di tali relazioni]
Come caso particolare, per β = α, si ottiene:
cos(2α) = cos(α)2 – sin(α)2 = [essendo sin(α)2=1–cos(α)2] 2cos(α)2 – 1, sin(2α) = 2
sin(α)·cos(α).
Si possono ricavare facilmente, essendo tan(x) = sin(x)/cos(x):
tan(α+β) = (tan(α)+tab(β)) / (1–tan(α)·tan(β)) e tan(2α) = 2 tan(α) / (1–
tan(α)2)
A lato, e sotto, è esemplificata l'azione di z
z 2:
viene raddoppiato "θ" e viene elevato al quadrato "ρ", per
cui ogni semicerchio centrato in O sopra all'asse x viene
trasformato nel cerchio centrato in O con raggio elevato
al quadrato, e lo stesso accade per il semicerchio
simmetrico che sta sotto all'asse x.
Ad es. il punto (0,2), ossia 0 + 2 i, viene trasformato nel punto (-4,0), ossia -4+0i: la direzione da 90° diventa 180° e il
modulo da 2 diventa 4. Ma anche il punto (0,-2) del semicerchio inferiore, ossia 0-2i, viene trasformato nel punto (-4,0):
la direzione da -90° diventa -180°, ovvero da 270° diventa 540° che, "come direzione", è uguale a 540°-360° = 180°, e
il modulo da 2 diventa 4.
Del resto, con i calcoli, abbiamo sia: (2i)2= 22 i2= 4·(-1) = -4, sia: (-2i)2= (-2)2 i2= 4·(-1) = -4.
Geometricamente (vedi figura (A) sotto) possiamo interpretare anche il fatto noto che non solo 1 ma anche -1 elevato
al quadrato fa 1 (-1 ha θ=180°, per cui moltiplicare per -1 equivale a ruotare di 180°, e quindi -1 per sé stesso diventa
1). In (B) è invece illustrato che sia i che -i al quadrato fanno -1 (i ha direzione 90°, il suo doppio è 180°, che è la
direzione di -1; -i ha direzione -90° il cui doppio è -180°, che è un altro modo di esprimere la direzione di 180°). La
figura (C) illustra in un modo alternativo che -i al quadrato fa -1 (la direzione di -i posso indicarla con 270° il cui
doppio è 540° che, come si è già osservato, equivale a 180°).
Più in generale ogni punto e il suo simmetrico rispetto ad O sono trasformati da z
(-z)2 = (-1)2z2 = z2.
z2 nello stesso punto. Del resto,
Come nel caso in cui x sia un numero reale positivo con √x (radice quadrata di x) si indica uno dei due numeri
(quello positivo) che al quadrato fanno x, così, più in generale, se z è un numero complesso, con √z si indica uno dei
numeri complessi che al quadrato fanno z, e precisamente quello con direzione in(-90°, 90°]. In particolare con √(-1) si
indica i, non -i.
E, per esempio, come √(-3/4), si prende √3 /2 i [per le proprietà delle potenze,
il suo quadrato è il quadrato di √3 /2 per il quadrato di i, ossia 3/4·(-1) = -3/4],
non il suo opposto -√3 /2 i , che anch'esso al quadrato fa √(-3/4). In pratica si
procede così:
√(-3/4) = √ ( 3 /4·(-1) ) = √(3/4)·√(-1) = √3 /2 i .
Posso , invece, dire che z2= -3/4 ha come soluzioni entrambi i numeri,
ossia±√3 /2 i . .
La figura sotto a sinistra illustra un'altra trasformazione, z 1/z, che, ricordando
la
interpretazione "polare" del prodotto, possiamo descrivere anche così: ρ' = 1/ρ, θ'
= – θ (infatti z e 1/z per avere come prodotto 1, ossia un numero che ha 1 come modulo
e 0 come argomento, devono avere moduli ρ e ρ' che abbiano come prodotto 1 e
argomenti θ e θ' che abbiano come somma 0, o, che è lo stesso, 360°): i punti all'interno
del "cerchio goniometrico" vengono trasformati in punti esterni, e viceversa, e tutti i
punti vengono ribaltati rispetto all'asse y.
Nella figura sopra a destra si vede come una particolare funzione a input e output
complessi trasforma un reticolato: si vede che cambia la forma ma che le linee tra loro
perpendicolari si mantengono perpendicolari. Quella di mantenere gli angoli con cui si
incontrano le linee è una caratteristica delle trasformazioni descrivibili come z z' con
z' termine ottenuto componendo le quattro operazioni (e altri particolari tipi di funzione).
È di questo genere anche la funzione che trasforma la figura F nella figura D
nell'esempio all'inizio della voce
trasformazioni geometriche.
Si può intuire come questo tipo di trasformazioni (chiamate "conformi", in
quanto conservano la forma degli incroci) possano essere utili
per studiare come cambia il flusso di un fluido al cambiare della forma di un
canale, per studiare questioni di aerodinamica e altri fenomeni di tipo fisico:
una situazione in cui il comportamento di una granzezza vettoriale (una
velocità, una forza, …) varia lungo certe linee può essere ricondotta ad una in
cui le linee lungo cui agisce la grandezza siano più facili da rappresentare e,
quindi, consentano di semplificare lo studio matematico del problema.
A destra un esempio di come un cerchio può essere
trasformato dando luogo a delle curve particolarmente belle. In
questo caso si viene a formare un nodo in O. Vediamo come
trovare quali sono i punti del cerchio che vengono trasformati in
O, ossia quali sono i valori di z per cui:
z2+ z + 1 = 0.
Potendo operare in C come se si fosse in R,
posso ricorrere a un
completamento del
quadrato:
(z + 1/2)2- 1/4 + 1 = 0 → (z + 1/2)2 = -3/4
→ [vedi
sopra]
z + 1/2 = i √(3/4) OR z + 1/2 = -i √(3/4)
z = -1/2 + i √3/2 OR z = -1/2 - i √3/2.
(-1/2, √3/2) e (-1/2, √3/2) sono dunque i due
punti che vengono
trasformati nell'origine
degli assi.
La cosa può
essere anche
interpretata
geometricament
e, come
illustrato a
sinistra nel caso
di z
rappresentato
dal punto (-1/2,
√3/2): la
trasformazione
in z2 produce
mediante una
rotazione un
punto che poi,
con la
traslazione
corrispondente a
"+z" diventa (1,0) e, infine,
con "+1"
diventa
l'origine.
Polinomi rispetto a una variabile complessa
Quando per descrivere il piano invece delle coordinate cartesiane si usano i numeri
complessi si parla di piano di Argand, dal nome del matematico francese che, verso la
fine del XIX sec., ha avuto l'idea di usare i numeri complessi per descrivere figure e
trasformazioni geometriche, e, in particolare, di rappresentare le rotazioni di 90° come
moltiplicazioni per i.
Ma i numeri complessi sono stati "inventati" nel XVI sec. come "trucco" per risolvere
alcune equazioni polinomiali di 3° grado. Il procedimento è stato descritto in quegli
anni dall'italiano Gerolamo Cardano, anche se probabilmente non è stato lui ad avere
l'idea iniziale.
Si era trovato che un'equazione del tipo x3 + p x + q = 0 ha come soluzione rispetto ad x il
numero 3√(R-q/2) - 3√(R+q/2) dove R = √((p/3)3+(q/2)2)
Ad esempio per x3 + 6 x - 2 = 0 si trova R = √(23+12) = √9 = 3 da cui x = 3√4 - 3√2. È
possibile verificare (anche con una calcolatrice) che si tratta effettivamente di una
soluzione.
Ma per x3 - 15 x - 4 = 0 si trova R = √(-53+22) = √(-121), che non sarebbe definito,
mentre si sa che una soluzione ci deve essere (le funzioni polinomiali di 3° grado assumono
valori sia positivi che negativi quindi ci si aspetta che assumano anche il valore 0). Si è
allora provato a inventare i per indicare √(-1) e vedere se con qualche manipolazione
algebrica si riesce a ricavare la soluzione.
√(-121) diventa 11i e la soluzione diventerebbe x = 3√(2 + 11i) - 3√(2 - 11i)
Si trova che (2+i)3 = (2+i)(2+i)(2+i) = (4+4i-1)(2+i) = (3+4i)(2+i) = (6+11i-4) = 2+11i e
analogamente che (2-i)3 = 2-11i, per cui si ha:
x = 3√(2 + 11i) - 3√(2 - 11i) = 2+i - 2-i = 4, che è effettivamente una soluzione della nostra
equazione.
Dunque, i numeri complessi sono stati introdotti come "numeri fittizi" per potere
estendere l'uso delle formule risolutive di alcune equazioni polinomiali e trovare
i numeri reali che le risolvono. Non c'era, invece, alcun interesse a trovare i numeri
complessi che risolvono una equazione, interesse che è nato, invece, con gli usi dei
numeri complessi descritti nei paragrafi precedenti, in cui si è avuto a che fare
con equazioni polinomiali di variabile complessa, come la equazione z2+ z + 1 =
0 risolta
sopra. Si possono considerare complessi non solo la variabile, ma anche i
coefficienti, come nel caso dell'equazione z2- i = 0, ossia z2 = i (che ha come soluzioni
cos(45°) + i s in(45°) e il suo opposto).
Ai polinomi di variabile complessa si può applicare lo stesso
algortimo
della divisione e lo stesso
teorema del resto visti per quelli di variabile reale.
In più per essi vale il cosiddetto teorema fondamentale dell'algebra, secondo il
quale ogni equazione polinomiale di variabile complessa di grado maggiore o uguale a
1 ha almeno una soluzione.
Ad esempio, x2+ 1 = 0 se le si assegna come dominio R non ha soluzioni, se le si
assegna come dominio C(caso in cui, in genere, verrebbe scritta come z2+ 1 = 0) ha
invece i come soluzione, e anche -i.
Dal teorema del resto e dal teorema fondamentale deriva la possibilità
di scomporre, nell'ambito dei numeri complessi, qualunque polinomio P(z) di grado n,
con n≥1, nel prodotto di n polinomi di grado 1. Infatti trovata una soluzione z1 posso
dividere P(z) per z-z1 e, trovato Q1(z) come quoziente, scrivere P(z) come (z-z1)Q(z);
poi, trovata una soluzione z2 di Q1(z), posso scriverlo come (z-z1) (z-z2)Q2(z); e così via
fino a ottenere (z-z1) (z-z2)… (z-zn).
Questo è il motivo per cui i programmi che svolgono calcoli simbolici, come Maple
e Derive, in genere svolgono le loro manipolazioni operando nei numeri complessi: in
tale ambito è sempre possibile fattorizzare i polinomi per i quali si conoscono formule
risolutive delle corrispondenti equazioni e, quindi, è più facile semplificare
un'espressione complessa contenente termini polinomiali.
Ciò, tuttavia, crea anche dei problemi. Infatti può accadere che una semplificazione
eseguita nell'ambito dei numeri complessi conduca a un termine che non è equivalente
nell'ambito dei numeri reali.
Ecco, sotto, un esempio di funzione F di cui viene tracciato il grafico anche in (∞,0) anche se ivi F non è definita: durante la tabulazione per tracciare il grafico il
programma calcola la radice anche dei numeri negativi, trasforma "i/i" in 1 e trova un
numero reale come valore della funzione (ad esempio per x=-1 trova -1-1+√(-4)/√(-1) =
-2+2i/i = -2+2 = 0).
Grafico di una particolare funzione realizzato
medianteDerive o Maple (la evidenziazione mediante
tratteggio della parte del grafico a sinistra dell'asse y è
nostra)
Grafico di:
x
x1+√(4x)/√x
E se chiedo al programma di risolvere l'equazione F(x) = 0 dove F è la stessa funzione,
ottengo come soluzione -1 anche se non lo sarebbe in quanto non appartiene al dominio
della equazione, se pensata di variabile reale (apparterebbe al dominio se considerassi
l'equazione nell'ambito dei numeri complessi). Per il programma, infatti, l'equazione
equivale a x+1=0 in quanto considera √(4x)/√x, ossia 2√x/√x, equivalente a 2 per ogni x
diverso da 0, anche per x<0.
L'applicazione R, invece, se eseguo:
f <- function(x) x-1+sqrt(4*x)/sqrt(x)
plot(f,-2,2,ylim=c(-1,4)); abline(h=0,v=0)
traccia il grafico correttamente, solo per gli input positivi. Se invece specifico che gli
input sono numeri complessi ottengo il grafico anche per gli input negativi:
g <- function(x) {z <- x+0i; f(z)}
plot(g,-2,2,add=TRUE,col="red")
È interessante osservare che le soluzioni di zn = 1, con z variabile complessa, corrispondono geometricamente ai
vertici del poligono regolare centrato nell'origine e avente un vertice in (0,1).
A lato è illustrato il caso z5 = 1: oltre a 1 è soluzionecos(360°/5) + i sin(360°/5) in quanto elevare alla 5 equivale a
moltiplicare "θ" per 5 e quindi ottenere cos(360°) + i sin(360°) che è uguale ad 1; ma è soluzione anche cos(360°/5·2) +
i sin(360°/5·2) in quanto 360°/5·2·5 = 360°·2 che, come direzione, equivale a 360°; e così via.
luogo geometrico
passaggio da R^2 a R^3