Equazioni lineari
Per equazione lineare, su R, intendiamo un’espressione della forma
a1x1 + a2x2 +…+ anxn
= b
(1)
in cui ai,b R e le x2 sono incognite, o variabili. Gli scalari ai sono i coefficienti delle rispettive x1, mentre b
si chiama termine costante, o semplicemente costante dell’equazione. Un insieme di valori delle incognite,
diciamo
x1 = k1
x2 = k2, …,
xn = kn
è una soluzione della (1) se è vero l’enunciato che si ottiene sostituendo ki ad xi :
a1k1 + a2 k 2 +…+ an k n = b
Si dice allora che questo insieme di valori soddisfa l’equazione. Se non vi è ambiguità sulla posizione delle
incognite nell’equazione, detta soluzione si rappresenta con la semplice n – pla
u = (k1 ,k 2,… k n)
▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬
Esempio
Consideriamo l’equazione x+2x-4z+ w = 3
La quaterna u = (3,2,1,0) è una soluzione dell’equazione, poiché
3+2·2–4·1+0 =3
o
3 = 3
è un enunciato vero. Però la quaterna u= (1,2,4,5) non è una soluzione dell’equazione,
dato che
1+2 ·2 - 4 ·4+5= 3
o
-6 = 3
▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬
Nell’equazione (1) si possono avere tre casi:
Caso (i) : Uno dei coefficienti della (1) è diverso da zero, diciamo a1 ≠ 0 . Allora possiamo riscrivere
l’equazione come segue:
a1x1 = b - a2x2 - …- anxn
o
x1 = a1-1b - a1-1 a2x2 - … - a1-1 anxn
Assegnando dei valori arbitrari alle incognite x2 , …, xn , ne otteniamo uno per x1 ;questi valori formano
una soluzione dell’equazione. Inoltre, ogni soluzione dell’equazione si può ottenere in questo modo. Si noti
in particolare che l’equazione lineare ad una incognita
ax = b,
con
a≠ 0
ha l’unica soluzione
x = a1-1b
▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬
Esempio
Consideriamo l’equazione
Riscriviamola come
2x = 8 + 4y - z
2x - 4y + z = 8
o
x = 4 + 2y - ½ z
Ogni valore di y e z porterà ad un valore di x, ed i tre valori costituiranno una soluzione
dell’equazione. Siano per esempio
y = 3 e z = 2; allora x = 4 + 2·3 – ½ ·2 = 9. In altre parole,
la terna u = (9,3,2) è una soluzione dell’equazione.
▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬
Caso (ii) : Tutti i coefficienti della (1) sono zero, ma la costante è diversa da zero. Cioè l’equazione ha
forma:
0x1 + 0x2 +…+ 0xn
= b
con
b≠ 0
Allora l’equazione non ha soluzioni.
Caso (iii) : Tutti i coefficienti della (1) sono zero e la costante è pure zero. Il che è come dire che l’equazione
ha la forma:
0x1 + 0x2 +…+ 0xn
= 0
Allora qualsiasi n – pla di scalari in R è una soluzione dell’equazione.
SISTEMA DI EQUAZIONI LINEARI
Consideriamo ora un sistema di m equazioni lineari nelle n incognite x1 ,…, xn:
a11x1 + a12x2 +…+ a1nxn
= b1
a21x2 + a22x2 +…+ a2nxn
= b2
…….………………………………..
am1x1 + am2x2 +…+ amnxn
= bm
in cui gli aij, bi appartengono al campo reale R. Il sistema si dice omogeneo se le costanti b1,…, bm sono tutte
zero. Una n – pla u = (k1 ,… k n) di numeri reali è una soluzione (ovvero una soluzione particolare) se
soddisfa ognuna delle equazioni; l’insieme di tutte queste soluzioni si indica quale insieme soluzione, o
soluzione generale.
Il sistema di equazioni lineari
a11x1 + a12x2 +…+ a1nxn
= 0
a21x2 + a22x2 +…+ a2nxn
= 0
…….………………………………..
am1x1 + am2x2 +…+ amnxn
= 0
è il sistema omogeneo associato a (*). Esso ha sempre una soluzione, cioè la n – pla zero 0 = (0,0,…0),
chiamata soluzione zero o soluzione banale. Ogni altra soluzione, se esiste, si chiama soluzione non zero, o
non banale.
SOLUZIONE DI UN SISTEMA DI EQUAZIONI LINEARI.
Consideriamo il già visto sistema (*) di equazioni lineari. Possiamo ridurlo ad uno più semplice nel modo
seguente:
Fase 1 :
Scambiare le equazioni in modo che la prima incognita x1 abbia un coefficiente non nullo
nella prima equazione, ovvero in modo che sia
a11 ≠ 0
Fase 2 :
Per ogni i 1 eseguire l’operazione
L1 ai1 L1 + a11 Li
Sostituire cioè l’equazione lineare i-esima Li con l’equazione che si ottiene moltiplicando
la prima equazione L1 per ai1 , la i-esima Li per a11 e sommando le due.
Si ottiene allora il seguente sistema, equivalente (problema 2.13) a (*), che ha cioè lo stesso insieme
soluzione di (*):
a11x1 + a12x2 + a13x3 +……+ a1nxn = b1
a2J2 1xj2 +……………..…+ a2nxn = b2
.………………………………………..
a J2 x J2 +……………..…+ amnxn = bm
in cui a11 ≠ 0. Qui x indica la prima incognita a coefficiente non nullo in un’equazione diversa dalla prima;
per la fase 2 è x ≠ x1 .
Questo procedimento, che elimina un’incognita da equazioni successive, è noto come eliminazione (di
Gauss).
▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬
Esempio
Consideriamo il seguente sistema di equazioni lineari:
2x + 4y - z + 2v + 2w = 1
3x + 6y + z - v + 4w = -7
4x + 8y + z + 5v - w = 3
Eliminiamo l’incognita x dalla seconda e terza equazione applicando le seguenti operazioni:
L2 -3 L1 + 2L2
Calcoliamo:
e
L3 -2L1 + L3
-3 L1 :
-6x - 12y + 3z - 6v - 6w = -3
2 L2 :
6x + 12y + 2z - 2v + 8w = -14
_____________________________________________
-3 L1 + 2 L2 :
5z - 8v + 2w = -17
-2 L1 :
-4x - 8y + 2z - 4v - 4w = -2
L3 :
4x + 8y + z - 5v - w = 3
_____________________________________________
-2L1 + L3:
3z + v - 5w = 1
Così il sistema iniziale è stato ridotto al seguente sistema equivalente:
2x + 4y - z + 2v + 2w = 1
5z - 8v + 2w = -17
3z + v - 5w = 1
Si noti che anche la y è stata eliminata dalla seconda e dalla terza equazione.
▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬
Osserviamo che, se si esclude la prima, le equazioni ora viste formano un sottosistema con meno equazioni e
meno incognite di quello (*) originale. Notiamo ancora che:
(i) se s’incontra un’equazione 0x1 + … 0xn = b, b ≠ 0, il sistema è inconsistente e non ha soluzione;
(ii) se invece si ha un’equazione 0x1 + … 0xn = 0, l’equazione stessa può essere cancellata senza effetti nella
soluzione.
Continuando con questo procedimento per ogni successivo sistema “minore”, otteniamo che il sistema (*) o
è inconsistente, o è riconducibile ad un sistema equivalente di forma
a11x1 + a12x2 + a13x3 +…+ a1nxn
= b1
a2J2xJ2 + a2, J2 + 1 xJ2 + …+ a2nxn
= b2
…….………………………………..
arJrxJr + ar, Jr + 1 xJr + …+ arnxn = br
(***)
in cui 1 < j2 < … < jr ed i coefficienti iniziali sono diversi da zero:
a11 ≠ 0, a2J2 ≠ 0, …, arJ r ≠ 0
(Per comodità di notazione usiamo per il sistema (***) gli stessi simboli aij, bk che abbiamo usato con il
sistema (*); essi possono ovviamente indicare degli scalari differenti.)
Definizione: il precedente sistema (***) si dice disposto a gradini; le incognite xi che non appaiono all’inizio
di ogni equazione ( i ≠ 1 j2,…, jr) vengono definite variabili libere.
Vale il seguente teorema:
Teorema La soluzione del sistema (***) disposto a gradini si ottiene nel modo che segue. Abbiamo due casi:
(i) r = n. Cioè, vi sono tante equazioni quante incognite. Allora il sistema ha un’unica soluzione.
(ii) r < n . Cioè, vi sono meno equazioni che incognite. Allora possiamo assegnare dei valori arbitrari alle n –
r variabili libere, ottenendo una soluzione del sistema.
Si noti in particolare che questo teorema implica che il sistema (***) ed ogni altro equivalente siano
consistenti. Perciò se il sistema (***) è consistente e si riduce al caso (ii) visto ora, possiamo assegnare tanti
valori diversi alle variabili libere e ottenere così varie soluzioni del sistema. Il diagramma che segue illustra
quanto detto.
▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬
Esempio
Riduciamo il seguente sistema tramite le operazioni
L2 -3 L1 + 2L2
e
L3 -3L1 + 2L3
seguite dalla L3 -3L2 + L3
2x + y - 2z + 3w = 1
3x + 2y - z + 2w
2x + y - 2z + 3w = 1
2x + y - 2z + 3w = 1
= 4
y + 4z - 5w = 5
y + 4z - 5w = 5
3x + 3y + 3z - 3w = 5
3y + 12z - 15w = 7
0 = -8
L’equazione 0 = -8, ovvero 0x + 0y + 0z + 0w = -8, dimostra che il sistema originale è inconsistente, e perciò
non ha soluzione.
▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬
Esempio
Riduciamo il sistema che segue con le operazioni
L2 - L1 + L2 ,
L3 -2L1 + L3
L4 -2 L1 + L4
seguite dalle
e
e
L3 L2 - L3
L4 -2 L2 + L4:
x + 2y - 3z = 4
x + 2y - 3z
= 4
x + 2y - 3z = 4
x + 3y + z = 11
y + 4z
= 7
y + 4z = 7
2x + 5y - 4z = 13
y + 2z
= 5
2x + 6y + 2z = 22
2y + 8z = 14
2z = 2
0 = 0
x + 2y - 3z = 4
y + 4z = 7
2z = 2
Notare prima di tutto che il sistema è consistente, dato che non comprende alcuna equazione della forma 0 =
b, con b ≠ 0. Inoltre, poiché nella forma a gradini si hanno tre equazioni nelle tre incognite, il sistema ha
un’unica soluzione. Dalla terza equazione si ha z = 1. Sostituendo z = 1 nella seconda otteniamo y = 3.
Sostituendo poi z = 1 e y = 3 nella prima equazione troviamo x = 1. Perciò x= 1 , y = 3 e z = 1,
ovvero, in altre parole, la terna (1,3,1) è l’unica soluzione del sistema.
▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬
Esempio
Riduciamo il sistema che segue applicando le operazioni
L3 -5L1 + L3 e poi
L3 -2L2 + L3 :
x + 2y - 2z + 3w = 2
2x + 4y - 3z + 4w = 5
5x + 10y - 8z + 11w = 1 2
x + 2y - 2z + 3w = 2
z - 2w = 1
2z - 4w = 2
x + 2y - 2z + 3w = 2
z - 2w = 1
x + 2y - 2z + 3w = 2
z - 2w = 1
0 = 0
Il sistema è consistente, e poiché nella disposizione a gradini si hanno più incognite che equazioni, esso ha
un numero infinito di soluzioni. Infatti ci sono due variabili libere, y e w, e così si può avere una soluzione
particolare dando un qualsiasi valore alle y e w stesse. Siano per esempio w = 1 e y = -2 . Sostituendo w
= 1 nella seconda equazione, otteniamo z = 3. Ponendo w = 1, z = 3 e
y = -2 nella prima equazione, troviamo x = 9. Perciò x = 9, y = -2, z = 3 e w = 1, ovvero, in altri
termini, la quaterna (9, -2, 3, 1) è una soluzione particolare del sistema.
▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬
Osservazione: La soluzione generale del sistema visto nell’esempio precedente, si trova nel modo che segue.
Si assegnino alle variabili libere dei valori arbitrari; diciamo y = a e w = b. Sostituendo w = b nella
seconda equazione , otteniamo z = 1 + 2b. Ponendo y = a, z =1 + 2b, e w = b nella prima equazione si
trova x = 4 – 2a + b.
Perciò la soluzione generale del sistema è:
x = 4 - 2a + b,
y =a,
z = 1 + 2b
w=b
ovvero ( 4 - 2a + b, a , 1 + 2b, b) dove a e b, sono dei numeri arbitrari. Spesso la soluzione generale si
porge in termini delle variabili libere y e w (invece di a e b)
come segue:
x = 4 - 2y + w
z = 1 + 2w
o
(4 - 2y + w, y, 1 + 2w, w)
In un capitolo successivo approfondiremo la rappresentazione della soluzione generale di un sistema di
equazioni lineari.
▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬
Esempio
Consideriamo due equazioni in due incognite:
a1x + b1y
a2x + b2y
= c1
= c2
Secondo la nostra teoria, si deve verificare esattamente uno dei seguenti tre casi:
(i)
Il sistema è inconsistente.
(ii)
Il sistema è equivalente a due equazioni a gradini.
(iii)
Il sistema è equivalente a un’ equazione a gradini.
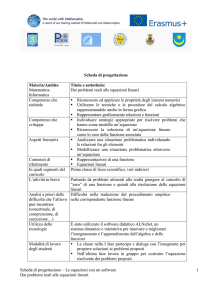
Quando le equazioni lineari in due incognite a coefficienti reali si possono rappresentare come rette nel piano
R2, i casi precedenti possono essere interpretati geometricamente nel modo che segue:
(i)
(ii)
(iii)
Le due rette sono parallele.
Le due rette si intersecano in un punto.
Le due rette sono coincidenti.
SOLUZIONE DI UN SISTEMA OMOGENEO DI EQUAZIONI
LINEARI .
Se cominciamo con un sistema omogeneo di equazioni lineari, esso è per forza consistente, dato che, per
esempio, esso ha la soluzione zero 0= (0,0,…,0). Perciò lo si può sempre ridurre ad un sistema omogeneo
equivalente disposto a gradini:
a11x1 + a12x2 + a13x3 +…………… …+ a1nxn
a2j2x j2 + a2, j2 + 1 x j2 +…………… …+ a2nxn
…….………………………………..
arjrx jr + ar, jr + 1 x jr +…………… …+ arnxn
= 0
= 0
= 0
Quindi abbiamo le due possibilità:
(i)
r = n. Allora il sistema ha solo la soluzione zero.
(ii)
(iii)
r < n. Il sistema ha una soluzione non nulla.
Cominciando con meno equazioni che incognite, avremo r < n nella forma a gradini, e il sistema ha
una soluzione non nulla. Il che è come dire:
Teorema Un sistema omogeneo di equazioni lineari con più incognite che equazioni ha una soluzione non
nulla.
▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬
Esempio
Il sistema omogeneo
x + 2y - 3z + w = 0
x - 3y + z - 2w = 0
2x + y - 3z + 5w = 0
ha una soluzione non nulla, perché vi sono quattro incognite e solo tre equazioni.
▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬
Esempio
x + y - z = 0
2x - 3y + z = 0
x + 4y + 2z = 0
Riduciamo a gradini il sistema :
x + y - z = 0
- 5y + 3z = 0
- 5y + 3z = 0
x + y - z = 0
- 5y + 3z = 0
Esso ha una soluzione non nulla, poiché, con la forma a gradini, abbiamo ottenuto soltanto due equazioni
nelle tre incognite. Sia per esempio z = 5; allora y = 3 e x = 2. In altri termini, la terna (2,3,5) è una
particolare soluzione non nulla.
▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬
Esempio
Riduciamo in forma a gradini il sistema :
x + y - z = 0
x + y - z = 0
x + y - z = 0
2x + 4y - z = 0
2y + z = 0
2y + z = 0
3x + 2y + 2z = 0
- y + 5z = 0
11z = 0
Dato che in detta forma si hanno tre equazioni in tre incognite, il sistema ha soltanto la soluzione zero (0,0,0).
PROBLEMI RISOLTI
SOLUZIONE DI EQUAZIONI LINEARI
Risolvere il sistema:
2x - 3y + 6z + 2v - 5w = 3
y - 4z + v
= 3
v - 3w
= 3
Il sistema è disposto a gradini. Dato che le equazioni cominciano rispettivamente con le incognite x, y e v, le
altre incognite z e w sono le variabili libere.
Per ottenere la soluzione generale, poniamo per esempio z = a e w = b . Sostituendo nella terza equazione,
v - 3b = 2
o
v = 2 + 3b
E sostituendo nella seconda,
y + 4a + 2 + 3b = 1
o
y = 4a - 3b - 1
Sostituendo ancora nella prima,
2x - 3( 4a - 3b - 1 ) + 6a - 2(2 + 3b ) - 5b = 3
o
x = 3a - 5b -2
Così la soluzione generale del sistema è
x = 3a - 5b -2,
y = 4a - 3b - 1,
z = a,
v = 2 + 3b,
w = b
ovvero (3a - 5b -2,
4a - 3b - 1, a, 2 + 3b,
b) in cui a e b sono dei numeri reali arbitrari.
Alcuni testi pongono la soluzione generale in termini delle variabili libere z e w invece di a e b, come
segue:
x = 3z - 5w - 2
y = 4z - 3 w - 1 o (3z - 5w -2, 4z - 3w - 1, z, 2 + 3w, w)
v = 2 + 3w
Dopo aver trovato la soluzione generale, possiamo trovarne una particolare per sostituzione in quella
generale stessa. Siano per esempio a = 2 e b = 1; allora
x = -1, y = 4, z = 2,
v = 5, w = 1
o
(-1, 4, 2, 5, 1)
è una soluzione particolare del sistema dato.
▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬
Risolvere il sistema:
x + 2y - 3z = -1
3x - y + 2z = 7
5x + 3y - 4z = 2
Ridurre nella forma a gradini. Eliminare la x dalla seconda e terza equazione con le operazioni
L2 - 3L1 + L2 ,
e
- 3L1 :
-3x - 6y + 9z = 3
L2 :
3x - y + 2z = 7
_____________________________
- 3L1 + L2
-7y + 11z = 10
L3 -5L1 + L3
- 5L1 :
-5x - 10y - 15z = 5
L3 :
5x + 3y - 4z = 2
_______________________________
-5L1 + L3
-7y + 11z = 7
Otterremo così il sistema equivalente
x + 2y - 3z = -1
-7 y + 11z = 10
-7 y + 11z = 7
La seconda e la terza equazione mostrano che il sistema è inconsistente, perché se si sottrae si ottiene
0x + 0y + 0z = 3
o
0 = 3
▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬
Risolvere il sistema:
2x + y - 2z = 10
3x + 2y + 2z = 1
5x + 4y + 3z = 4
Ridurre nella forma a gradini. Eliminare la x dalla seconda e terza equazione con le operazioni
L2 - 3L1 + 2L2 ,
e
- 3L1 :
-6x - 3y + 6z = -30
2L2 :
6x + 4y + 4z = 2
_____________________________
- 3L1 + 2L2
y + 10z = -28
L3 -5L1 + 2L3
- 5L1 :
-10x - 5y + 10z = -50
2L3
10x + 8y + 6z =
8
________________________________
-5L1 + 2L3
3y + 16z = -42
Otteniamo così il seguente sistema, e dalla terza equazione eliminiamo poi la y con l’operazione L 3 3L2 + L3
2x + y - 2z
=
10
y + 10z = - 28
3y + 16z = - 42
2x + y - 2z
e
=
10
y + 10z = - 28
- 14z =
42
Nella forma a gradini si hanno tre equazioni in tre incognite: quindi il sistema ha un’unica soluzione. Per la
terza equazione, z = -3. Sostituendo nella seconda si ottiene y = 2. Sostituendo poi nella prima, x = 1.
Perciò x = 1, y = 2 e , z = -3, ovvero la terna (1,2, -3) è l’unica soluzione del sistema.
▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬