1
Note di “Derivate ed Integrali”
Versione 1.0
Lamberto Lamberti & Corrado Mascia
parte II
Integrale, derivate, teoremi sulle derivate, analisi locale, analisi globale
16 Ottobre 2002
2
Indice
1
2
3
4
5
L’integrale
1.1 Aree ed integrali . . . . . . . . . . .
1.2 Definizione analitica dell’integrale
1.3 Proprietà dell’integrale . . . . . . .
1.4 Integrale con estremi variabili . . .
1.5 Scheda riassuntiva . . . . . . . . .
.
.
.
.
.
Derivate, derivate e derivate
2.1 Definizione di derivata . . . . . . . .
2.2 Prime formule di derivazione . . . .
2.3 Regole fondamentali di derivazione
2.4 Derivate successive . . . . . . . . . .
2.5 ∗ Derivate parziali . . . . . . . . . . .
2.6 Scheda riassuntiva . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5
5
10
14
18
20
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
25
27
30
33
39
41
43
Teoremi sulle derivate
3.1 Teorema di Lagrange . . . . . . . . . . . . .
3.2 Conseguenze del Teorema di Lagrange . . .
3.3 Teorema fondamentale del calcolo integrale
3.4 Scheda riassuntiva . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
45
45
48
53
58
Analisi locale
4.1 Punti stazionari . . . . . .
4.2 Punti di singolarità . . . .
4.3 Comportamento asintotico
4.4 Scheda riassuntiva . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
61
61
65
67
71
Analisi globale
5.1 Problemi quotidiani . . . . . . . . . . .
5.2 A caccia di massimi e minimi assoluti
5.3 Concavità e convessità . . . . . . . . .
5.4 Scheda riassuntiva . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
73
73
74
77
82
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
.
.
.
.
4
INDICE
Tabella delle derivate
funzione f
derivata prima f 0
funzione f
derivata prima f 0
costante
0
xα
αxα−1
sin x
cos x
cos x
− sin x
ex
ex
ln x
1
x
tan x
1
= 1 + tan2 x
2
cos x
cot x
ax
ax ln a
arctan x
arcsin x
sinh x
√
1
1 − x2
cosh x
arccos x
cosh x
−
1
= −1 − cot2 x
2
sin x
1
1 + x2
−√
1
1 − x2
sinh x
Capitolo 1
L’integrale
1.1
Aree ed integrali
L’idea intuitiva di “area” di una regione del piano è il numero di quadrati unitari
contenuti all’interno della regione. Da questa visione naı̈f dell’area seguono alcune
proprietà elementari:
(i) l’area è un numero positivo, che dipende dall’unità di misura adottata (metri quadrati, centimetri quadrati,. . . );
(ii) figure congruenti, cioè sovrapponibili con un movimento rigido, hanno la stessa
area;
(iii) l’area di un rettangolo è il prodotto delle lunghezze dei lati;
(iv) se una regione A contiene una regione B allora l’area di A è maggiore o uguale a
quella di B;
(v) se una regione è divisa in più parti disgiunte, l’area del tutto è data dalla somma
delle aree delle singole parti.
Grazie alle proprietà elencate, le regioni decomponibili in rettangoli, dette plurirettangoli, hanno come area la somma delle aree (prodotto dei lati) dei rettangoli che le
compongono. Inoltre, per ogni regione E, scelti due plurirettangoli R0 e R00 tali che
R0 ⊆ E ⊆ R00 , riesce
A(R0 ) ≤ A(E) ≤ A(R00 ),
dove A(E) indica l’area di E.
Il valore A(E) può essere individuato se si conoscono due successioni di plurirettangoli
Rn0 ed Rn00 tali che
Rn0 ⊆ E ⊆ Rn00 ,
lim A(Rn0 ) = n→∞
lim A(Rn00 )
n→∞
Tale procedimento si chiama metodo di esaustione ed è quello usato per l’area di numerose regioni considerate in geometria euclidea (cerchi, ellissi, ecc.).
5
6
CAPITOLO 1. L’INTEGRALE
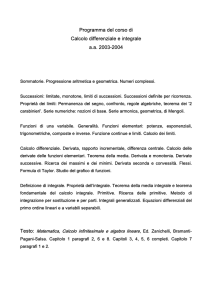
Figura 1.1: La regione E e due plurirettangoli approssimanti
Il procedimento appena descritto è particolarmente interessante al fine di dare
una definizione rigorosa di area di una regione del piano. Infatti, non è assolutamente chiaro se ad un qualsiasi sottoinsieme del piano sia possibile associare un
numero, per l’appunto l’area, in modo che siano soddisfatte le proprietà suscritte.
Un insieme per cui sia possibile determinare le successioni di plurirettangoli Rn0
ed Rn00 con le proprietà appena dette si chiama insieme misurabile, e il valore di
lim A(Rn0 ) = lim A(Rn00 ) è l’area dell’insieme. Il fatto sorprendente è che esistono
n→∞
n→∞
insiemi non misurabili!
Area di un sottografico
Consideriamo una funzione f : [a, b] → R non negativa: la regione
R = {(x, y) | a ≤ x ≤ b,
0 ≤ y ≤ f (x)}
è detta sottografico di f relativamente all’intervallo [a, b]. La nozione analitica di
integrale nasce dall’esigenza di definire rigorosamente e calcolare l’area A di un sottografico.
Definizione 1.1.1 (Integrale di una funzione non negativa).
Sia f definita in [a, b] e non negativa. L’area del sottografico di f in [a, b] si chiama integrale
della funzione f : [a, b] → R sull’intervallo [a, b] e si indica con
Z
b
f (x) dx
a
A questo punto ci sono due problemi fondamentali.
– Determinare una classe di funzioni per cui l’integrale abbia senso. In altre parole,
determinare una classe di funzioni il cui sottografico abbia un’area ben definita.
1.1. AREE ED INTEGRALI
7
– Determinare una maniera operativa per calcolare il valore dell’integrale per lo meno
in qualche caso di funzione f particolarmente semplice.
Partiamo prima dal secondo problema e seguiamo la strategia del metodo di esaustione. Per costruire i plurirettangoli approssimanti
• si divide l’intervallo [a, b] in più sotto–intervalli tramite una scelta di punti
a = x0 < x1 < . . . < xn = b;
• si approssima l’area del sottografico relativo a ciascuno di tali intervalli con quella
di due rettangoli, R0 e R00 , che hanno come base il sotto–intervallo e come altezze
il minimo e il massimo che la funzione prende in tale sotto–intervallo.
Assegnata una funzione f (x), continua in [a, b], indichiamo con
P = {x0 , x1 , . . . , xn }
dove a = x0 < x1 < . . . < xn = b
mi = min f (x)
Mi = max f (x)
[xi−1 ,xi ]
[xi−1 ,xi ]
∆xi = xi − xi−1 .
L’insieme P , che determina la suddivisione di [a, b] in sottointervalli, è detto essere una
partizione di [a, b], dato che [a, b] =
date da
A(R0 ) =
n
X
n
S
[xi−1 , xi ]. Le aree dei plurirettangoli R0 e R00 sono
i=1
mi ∆xi ,
A(R00 ) =
i=1
n
X
Mi ∆xi .
i=1
Aumentando il numero di punti di sottointervalli e facendo in modo che le lunghezze
∆xi = xi+1 − xi tendano a zero man mano che si aumenta il numero di punti, si ottiene la successione di plurirettangoli richiesta. Il valore comune del limite delle aree
dei plurirettangoli contenuti e di quelli contenenti la regione è l’integrale richiesto.
Partiamo da qualche esempio.
I. Nel caso di f (x) = costante = γ, il calcolo è banale: il sottografico è un rettangolo e quindi
Z
b
γ dx = γ(b − a).
a
Anche il procedimento tramite la suddivisione in sottointervalli porta allo stesso risultato: scelti
i punti x0 , . . . , xn , si ha sempre e comunque mi = Mi = γ, quindi
0
00
A(R ) = A(R ) =
n
X
γ∆xi = γ(b − a).
i=1
Dato che A(R0 ) ≤
Rb
a
f (x) dx ≤ A(R00 ), si ottiene la conclusione.
II. L’integrale della funzione f (x) = x, come sappiamo dalla geometria elementare, ha il valore
Z
b
a
1
1
x dx = (b − a)(b + a) = (b2 − a2 ).
2
2
8
CAPITOLO 1. L’INTEGRALE
Verifichiamo il risultato a partire dall’approssimazione tramite plurirettangoli. Dividiamo l’intervallo [a, b] in n parti di uguale lunghezza tramite i punti
dove h =
a < a + h < a + 2h < . . . < a + nh = b
b−a
.
n
Ponendo xk = a + kh,
mk =
min x = xk−1 = a + (k − 1)h,
[xk−1 ,xk ]
Mk = max x = xk = a + kh,
[xk−1 ,xk ]
i plurirettangoli hanno aree
A(Rn0 )
= ah + (a + h)h + . . . + (a + (n − 1)h)h = h
n−1
X
(a + kh) = hna + h
k=0
n
X
A(Rn00 ) = (a + h)h + (a + 2h)h + . . . + (a + nh)h = h
2
(a + kh) = hna + h
k=1
Tenuto conto che
n−1
P
k=
k=0
n(n−1)
2
e
n
P
k=
k=1
n(n+1)
,
2
n−1
X
k,
k=0
n
X
2
k
k=1
riesce
n(n − 1)
n(n − 1)
= (b − a)a + (b − a)2
2
2n2
n(n
+
1)
n(n
+ 1)
A(Rn00 ) = hna + h2
= (b − a)a + (b − a)2
,
2
2n2
A(Rn0 ) = hna + h2
quantità che hanno evidentemente lo stesso limite
lim A(Rn0 ) = lim A(Rn00 ) = (b − a)a +
n→+∞
n→+∞
(b − a)2
b2 − a2
=
.
2
2
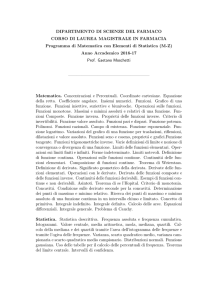
III. Per misurare l’area del sottografico della parabola y = x2 , non abbiamo formule nell’archivio delle figure geometriche elementari. Per semplicità, supponiamo 0 ≤ a < b e costruiamo le
somme su sotto intervalli come fatto prima, cioè scegliamo la partizione a, a+h, a+2h, . . . , a+
(n − 1)h, a + nh = b dove h = (b − a)/n. In questo caso, ponendo xk = a + kh,
mk =
min x2 = (a + (k − 1)h)2 ,
[xk−1 ,xk ]
Mk = max x2 = (a + kh)2 ,
[xk−1 ,xk ]
da cui segue
A(Rn0 ) = a2 h + (a + h)2 h + (a + 2h)2 h + . . . + (a + (n − 1)h)2 h,
A(Rn00 ) = (a + h)2 h + (a + 2h)2 h + . . . + (a + nh)2 h.
1.1. AREE ED INTEGRALI
9
Svolti i quadrati e tenuto presente che h =
(
A(Rn0 )
2
= h na + 2ah
b−a
n ,
n−1
X
si ottiene
k+h
2
k=0
n−1
X
)
k
2
k=0
n−1
X
X
2a(b − a)
(b − a)2 n−1
= (b − a) a +
k
+
k2 ,
3
n2
n
k=0
k=0
(
2
(
A(Rn00 ) = h na2 + 2ah
n
X
k + h2
k=1
(
2
= (b − a) a +
Dato che
n
P
k=1
k = 12 n(n + 1) e
n
P
k=1
n
X
)
)
k2
k=1
n
2a(b − a) X
n
(b − a)2 X
k+
k2 .
3
n
k=1
k=1
n2
)
k 2 = 16 n(n + 1)(2n + 1), sostituendo
n−1
(n − 1)(2n − 1)
= (b − a) a + a(b − a)
+ (b − a)2
,
n
6n2
n+1
(n + 1)(2n + 1)
A(Rn00 ) = (b − a) a2 + a(b − a)
+ (b − a)2
.
n
6n2
A(Rn0 )
2
Quindi
lim A(Rn0 ) = lim A(Rn00 ) = (b − a)a2 + a(b − a)2 +
n→+∞
n→+∞
cioè
Z
b
a
(b − a)3
b3 − a3
=
,
3
3
1
x2 dx = (b3 − a3 ).
3
La formula ottenuta è nota come formula di Archimede per l’area del segmento parabolico,
cioè del sottografico della parabola x2 relativamente all’intervallo [0, H], area calcolata da
Archimede come un terzo dell’area del rettangolo di estremi (0, 0)−(H, H 2 ), quindi 13 H H 2 .
Il caso precedente su [a, b] si tratta, ovviamente, per differenza.
∗
Somma di potenze dei primi n interi. Nel calcolo dell’integrale delle funzioni x e x2 si sono usate le
formule
n
n
X
X
1
1
k = n(n + 1).
e
k 2 = n(n + 1)(2n + 1),
2
6
k=1
k=1
ma come si dimostrano? La somma
n
P
(k + 1)2 si può riscrivere in due modi diversi
k=1
n
X
(k + 1)2 = 22 + 32 + · · · + (n + 1)2 =
n
X
k 2 + (n + 1)2 − 1
k=1
k=1
oppure
n
X
k=1
(k + 1)2 =
n
X
k=1
(k 2 + 2k + 1) =
n
X
k=1
k2 + 2
n
X
k=1
k + n.
10
CAPITOLO 1. L’INTEGRALE
Figura 1.2: Un plurirettangolo per l’integrale di x2
Uguagliando le due espressioni, si ha
n
X
k 2 + (n + 1)2 − 1 =
k=1
n
X
k2 + 2
k=1
n
X
k+n
⇒
(n + 1)2 − 1 = 2
k=1
In modo simile si ricava la formula esplicita per
k = n2 + n, cioè la conclusione.
n
P
k 2 : scriviamo
(k + 1)3 in due modi diversi:
P
n
P
k
k=1
k 3 + (n + 1)3 − 1 =
k=1
Risolvendo rispetto a
n
X
k + n.
k=1
Sviluppando il binomio a primo membro, si ricava 2
n
X
n
X
(k + 1)3 =
k=1
n
X
k=1
k3 + 3
k=1
n
X
k2 + 3
k=1
n
X
k + n.
k=1
P
k 2 e utilizzando la formula per k k,
"
#
n
n
X
X
1
n(n + 1)(2n + 1)
k2 =
(n + 1)3 − 1 − 3
k−n =
.
3
6
P
k
k=1
k=1
Con la stessa strategia si può ricavare una formula esplicita per
n
P
k=1
k p per p ∈ N.
1.2 Definizione analitica dell’integrale
Nel precedente paragrafo, abbiamo considerato l’area di un sottografico come una
quantità data intuitivamente e la abbiamo rappresentata come limite di aree di plurirettangoli. Invertiamo ora il procedimento: partiamo dalla costruzione di plurirettangoli
(opportuni) e dimostriamo che le loro aree tendono ad un limite quando la lunghezza
1.2. DEFINIZIONE ANALITICA DELL’INTEGRALE
11
dei sottointervalli tende a zero. Il valore di questo limite dà la definizione di integrale.
È importante notare che la definizione di integrale è indipendente dal segno della funzione stessa e che l’equivalenza integrale=area del sottografico vale solo per funzioni
positive.
Data f : [a, b] → R continua, dividiamo l’intervallo tramite una partizione P ,
indicandone i punti con a = x0 < x1 < x2 < . . . < xn−1 < xn = b.
L’ampiezza δ della partizione P è il valore massimo delle lunghezze dei sottointervalli: δ = max{∆x1 , . . . , ∆xn } dove ∆xi := xi − xi−1 .
In ogni intervallo [xi−1 , xi ] scegliamo un punto ξi e formiamo la somma
F :=
n
X
f (ξi )∆xi ≡ f (ξ1 )∆x1 + f (ξ2 )∆x2 + · · · + f (ξn )∆xn .
i=1
Teorema 1.2.1 (Esistenza dell’integrale per funzioni continue).
Data una funzione f : [a, b] → R continua, la somma F tende ad un valore
limite per δ → 0 dove δ è l’ampiezza della partizione.
Tale limite è indipendente dalla scelta di xi , ξj .
Definizione 1.2.2 (Integrale di una funzione continua).
Il valore limite di F per δ → 0 si chiama integrale di f nell’intervallo [a, b] e si indica1 con
Z
b
f (x) dx.
a
La lettera usata per indicare la variabile di integrazione è del tutto indifferente: al posto di
Rb
Rb
Rb
f (x) dx, si può scrivere f (t) dt o f (u) du. Gli estremi dell’intervallo di integrazione a
a
a
a
e b influiscono sul valore dell’integrale per un’assegnata f . Perciò bisogna evitare scritture
Rx
Rb
come f (x) dx o f (a) da in cui la stessa lettera è usata per la variabile di integrazione e
a
a
per uno degli estremi dell’intervallo.
Nella definizione di integrale, non viene fatta nessuna richiesta di positività della
funzione. Se l’integrando f è positivo nell’intervallo [a, b], l’integrale si identifica con
l’area del sottografico di f in [a, b]. Se f è negativa in tutto o in parte dell’intervallo, l’unico effetto è di rendere alcuni fattori f (ξi ) negativi, invece di positivi. Questo corrisponde ad assegnare alla regione limitata dalla parte della curva sotto l’asse
delle x un’area negativa. L’integrale sarà quindi la somma di termini positivi e negativi, in
corrispondenza delle zone in cui la curva è sopra o sotto l’asse x.
1
Notazione di Leibnitz per l’integrale. Il simbolo dell’integrale è una modifica del simbolo di
somma indicato da una lunga S come si usava al tempo di Leibnitz. Il passaggio al limite da una
suddivisione finita in porzioni di lunghezza ∆xi è indicato dall’uso della lettera d invece di ∆.
12
CAPITOLO 1. L’INTEGRALE
Dimostrazione dell’esistenza dell’integrale per funzioni lipschitziane
Dimostriamo il Teorema sotto l’ipotesi aggiuntiva che la funzione f sia lipschitziana:
|f (x) − f (y)| ≤ L|x − y|
∀ x, y ∈ [a, b].
Decomponiamo [a, b] come [a, b] = [x0 , x1 ] ∪ [x1 , x2 ] ∪ . . . ∪ [xn−1 , xn ] e poniamo
P = {x0 , x1 , . . . , xn }
dove a = x0 < x1 < . . . < xn = b
mi = min f (x)
Mi = max f (x)
[xi−1 ,xi ]
[xi−1 ,xi ]
∆xi = xi − xi−1 .
Costruiamo le somme
s(P ) =
n
X
mi ∆xi ,
S(P ) =
i=1
n
X
Mi ∆xi
i=1
dette somme integrali inferiori e superiori.2
Passo 1. Tutte le somme integrali inferiori sono minori o uguali a tutte le somme integrali
superiori. In particolare, sup s(P ) ≤ inf S(P ), dove l’estremo superiore e l’estremo inferiore
P
P
sono presi rispetto a tutte le possibili partizioni P dell’intervallo [a, b].
È evidente che le somme inferiori sono minori uguali delle somme superiori costruite in corrispondenza della stessa decomposizione. Meno ovvio è che tale relazione si
conservi anche se le due somme sono riferite a decomposizioni diverse. Il fenomeno si
riconosce tramite il seguente ragionamento:
– date P1 e P2 due partizioni di [a, b], sia P ∗ = P1 ∪ P2 la partizione determinata dai
punti che figurano in P1 o in P2 ;
– riesce (evidentemente) s(P1 ) ≤ s(P ∗ ) ≤ S(P ∗ ) ≤ S(P2 );
– ne segue che s(P1 ) ≤ S(P2 ).
Passo 2. Per ogni partizione P0 di ampiezza δ, vale la stima S(P0 ) − s(P0 ) ≤ Lδ(b − a).
In particolare, sup s(P ) = inf S(P ), dove l’estremo superiore e l’estremo inferiore sono presi
P
P
rispetto a tutte le possibili partizioni P dell’intervallo [a, b].
Infatti, per una qualsiasi partizione P0 , vale
S(P0 ) − s(P0 ) =
n
X
i=1
(Mi − mi )∆xi =
n
X
|Mi − mi |∆xi
i=1
Siano αi e βi , rispettivamente, un punto di massimo ed uno di minimo della funzione
f in [xi−1 , xi ], allora
|Mi − mi | = |f (αi ) − f (βi )| ≤ L|αi − βi | ≤ Lδ.
2
Queste due somme integrali sono amici già conosciuti nel paragrafo iniziale. Lı̀ rappresentavano le
aree di plurirettangoli approssimanti. Qui la situazione è analoga a patto di tener conto delle questioni
collegate al segno di f .
1.2. DEFINIZIONE ANALITICA DELL’INTEGRALE
13
Sostituendo questa stima nella relazione precedente, si ottiene
0 ≤ inf S(P ) − sup s(P ) ≤ S(P0 ) − s(P0 ) ≤ Lδ
P
P
n
X
∆xi = Lδ(b − a).
i=1
Tenuto conto che possiamo scegliere P0 con δ arbitrariamente piccolo, ne segue la
conclusione.
Passo 3. Sia ` := sup s(P ) = inf S(P ). Scelti i punti ξi ∈ [xi−1 , xi ], le somme integrali
F =
n
P
P
P
f (ξi )∆xi tendono ad ` al tendere di δ a 0.
i=1
Fissata la partizione P e scelti ξi ∈ [xi−1 , xi ], si ha, per costruzione, mi ≤ f (ξi ) ≤ Mi ,
cioè s(P ) ≤ F ≤ S(P ) e quindi
|F − `| ≤ S(P ) − s(P ) ≤ Lδ(b − a)
che porta in un soffio alla conclusione.
Per dimostrare il Teorema supponendo solamente la continuità della funzione f
occorre passare per un altro risultato (il Teorema di Heine-Cantor) che garantisce
l’uniforme continuità della f . Come dovrebbe intuirsi dai passaggi per il caso lipschitziano, l’uniforme continuità gioca il suo ruolo nella stima (in modo uniforme,
appunto!) della differenza f (αi )−f (βi ). Avete intuito? Bene. Vi siete persi? Datevi
tempo... capirete.
Si possono integrare funzioni non continue?
Puó accadere che le somme integrali convergano anche se la funzione f non è continua dappertutto, ad esempio se essa ha solo discontinuità di salto in uno o in più punti. Ad esempio,
+1
R
sgn (x) dx = 0. Quindi l’integrale può avere senso anche per alcune funzioni che ab-
−1
biano delle discontinuità. La costruzione delle somme integrali é la stessa descritta per le funzioni continue con l’unica modifica di sostituire a ciascun massimo e minimo, rispettivamente,
l’estremo superiore e l’estremo inferiore:
mi =
inf
[xi−1 ,xi ]
f (x)
Mi =
sup f (x)
[xi−1 ,xi ]
Definizione 1.2.3 (Funzioni integrabili).
Una funzione f : [a, b] → R limitata si dice integrabile3 in [a, b] se la somma F tende ad un valore
limite per δ → 0, dove δ è l’ampiezza della partizione, e tale limite è indipendente dalla scelta di xi , ξj .
Equivalentemente, si può dire che una funzione è integrabile se sup s(P ) = inf S(P ) dove,
come sempre, P rappresenta una partizione di [a, b].
Alla luce della Definizione 1.2.3, il Teorema 1.2.1 si può enunciare nella forma: tutte le
funzioni continue in [a, b] sono integrabili in [a, b].
3
L’integrale che abbiamo definito qui è noto come integrale di Riemann per distinguerlo dai altri
concetti di integrale.
14
1.3
CAPITOLO 1. L’INTEGRALE
Proprietà dell’integrale
Le proprietà fondamentali dell’integrale discendono direttamente dalla sua definizione come limite di somme integrali.
Additività. Per ogni a < c < b e per ogni funzione integrabile f
b
Z
c
Z
f (x) dx =
a
f (x) dx +
b
Z
a
f (x) dx.
c
(1.1)
Per una dimostrazione analitica, dati a < c < b, scegliamo la partizione in modo che il punto c
appaia come un punto della divisione stessa, diciamo c = xm (con m che varia con n). Allora
n
X
m
X
f (ξi )∆xi =
i=1
n
X
f (ξi )∆xi +
i=1
f (ξi )∆xi ,
i=m+1
dove la prima somma a membro destro corrisponde ad una partizione dell’intervallo [a, c] in
m sottointervalli, e la seconda somma ad una partizione dell’intervallo [c, b] (in n − m sotto
intervalli). Per δ → 0, otteniamo la regola (1.1).
Per ora abbiamo definito ab f (x) dx solo per a < b. Per a = b o a > b, definiamo
l’integrale in modo che sia preservata la regola dell’additività: per c = a, deve valere
R
b
Z
Z
f (x) dx =
a
f (x) dx +
Z
da cui segue
Z
f (x) dx,
a
a
a
b
a
f (x) dx := 0
a
(coerente con l’interpretazione in termini di aree). Per b = a in (1.1)
0=
Z
a
f (x) dx =
c
Z
f (x) dx +
a
f (x) dx
c
a
a
Z
da cui segue la definizione
Z
a
f (x) dx := −
Z
c
f (x) dx
a < c,
a
c
dove il membro destro ha il significato precedentemente definito.
Il significato geometrico è che l’area sotto la curva y = f (x) va contata come
negativa se la direzione di percorrenza dall’estremo inferiore di integrazione
al superiore è decrescente in x.
Linearità. Per ogni α, β ∈ R e per ogni coppia di funzioni f, g integrabili
α
Z
b
a
f (x) dx + β
Z
b
a
g(x) dx =
Z
b
a
[αf (x) + βg(x)] dx.
(1.2)
1.3. PROPRIETÀ DELL’INTEGRALE
15
La dimostrazione è conseguenza della linearità della somma:
"
α
n
X
#
"
f (ξi )∆xi + β
i=1
n
X
#
g(ξi )∆xi =
n
X
i=1
[αf (ξi ) + βg(ξi )] ∆xi
i=1
La regola (1.2) ci permette di integrare combinazioni lineari di due o più funzioni che
possono essere integrate individualmente. Ad esempio per una funzione quadratica
f (x) = Ax2 + Bx + C con A, B, C ∈ R
Z
b
2
Ax + Bx + C dx = A
b
Z
a
Z
2
x dx + B
a
b
x dx +
a
Z
b
C dx
a
A 3
B
(b − a3 ) + (b2 − a2 ) + C(b − a).
3
2
=
Monotonı́a. Per ogni coppia di funzioni f, g integrabili
f ≥g
in [a, b]
b
Z
=⇒
f (x) dx ≥
a
Z
b
g(x) dx.
a
(1.3)
Infatti, dalla costruzione dell’integrale segue che
f ≥0
Z
⇒
in [a, b]
b
f (x) dx ≥ 0.
a
dato che l’integrale è ottenuto come limite di somme di termini che, nel caso di una funzione
non negativa, sono tutti non negativi. Dalla linearità dell’integrale,
Z
b
f (x) dx −
Z
a
b
Z
b
g(x) dx =
a
(f (x) − g(x)) dx ≥ 0.
a
Dalla proprietà di monotonia dell’integrale discende una proprietà utile, che è, sostanzialmente, una “disuguaglianza triangolare per integrali”:
Z
Zb
b
f (x) dx ≤ |f (x)| dx.
a
(1.4)
a
Rb
Rb
a
a
Infatti, dato che ±f ≤ |f |, riesce ± f (x) dx ≤
|f (x)| dx, e, con un minimo di memoria/atten-
zione alla definizione del modulo, segue la conclusione.
Teorema della media integrale
Sia f una funzione continua in un intervallo [a, b]. Per il teorema di Weierstrass, esistono due costanti M, m ∈ R tali che m ≤ f (x) ≤ M per ogni x ∈ [a, b]. Per la monotonia
dell’integrale, vale la stima
m(b − a) =
Z
b
a
m dx ≤
Z
b
a
f (x) dx ≤
Z
b
a
M dx = M (b − a)
(1.5)
16
CAPITOLO 1. L’INTEGRALE
Questa formula è intuitivamente ovvia: se f é non negativa e pensiamo all’integrale
come area, le quantità M (b − a) e m(b − a) rappresentano le aree di un rettangolo
circoscritto ed inscritto nel sottografico di f .
La formula (1.5) può anche essere riscritta nella forma
m ≤ µ :=
1 Zb
f (x) dx ≤ M.
b−a a
(1.6)
dove µ è la media integrale di f in [a, b].
Teorema 1.3.1 (Teorema della Media Integrale).
Sia f : [a, b] → R una funzione continua in [a, b]. Allora esiste un valore
ξ ∈ [a, b] tale che
1 Zb
f (ξ) =
f (x) dx.
b−a a
Nel caso di f (x) ≥ 0, il teorema equivale ad affermare che esiste un rettangolo di
base [a, b] ed una altezza f (ξ) conveniente che ha la stessa area del sottografico (cosa
del tutto evidente).
Dimostrazione del Teorema della Media Integrale. La dimostrazione è conseguenza immediata del Teorema dei valori intermedi. Infatti, come si è visto, la media µ di f in [a, b], definita in
(1.6), è sempre compresa tra il massimo M e il minimo m della funzione f nell’intervallo. Per il
teorema di Weierstrass esistono due punti x1 e x2 , tali che f (x1 ) = m e f (x2 ) = M . Applicando
all’intervallo delimitato da x1 e x2 il Teorema dei valori intermedi, si ottiene la conclusione.
Il Teorema 1.3.1 vale anche nel caso in cui b < a (ovviamente sempre sotto l’ipotesi
di continuitá della funzione f ).
Controesempio. Nel caso in cui la funzione f non sia continua in tutto [a, b], non è
detto che valga la conclusione. Ad esempio se si considera la funzione f (x) = sgn x in
1.3. PROPRIETÀ DELL’INTEGRALE
17
[−1, 2], si ha
Z 2
1
1
1
sgn (x) dx = (−1 + 2) = ,
2 − (−1) −1
3
3
che non fa parte dell’immagine della funzione sgn x.
µ=
Il nome “media integrale” discende dal fatto che il valore µ è l’erede naturale della “media
aritmetica”. Dato un numero finito di quantità f1 , f2 , . . . , fn si chiama media aritmetica il
valore
f1 + f2 + . . . + fn
.
n
Nella costruzione dell’integrale di una funzione in un intervallo, se consideriamo intervalli di
lunghezza ∆xi pari a (b − a)/n per ogni i, otteniamo come valore approssimante la quantità
n
X
f (xi )∆xi = (b − a)
i=1
f (x1 ) + f (x2 ) + · · · + f (xn )
.
n
Quindi la media aritmetica di f (x1 ), . . . , f (xn ) è pari a
n
f (x1 ) + · · · + f (xn )
1 X
=
f (xi )∆xi .
n
b − a i=1
Passando al limite, si ottiene proprio la media integrale!
Alle volte è utile considerare una media “pesata”, ossia
µ=
p1 f1 + p2 f2 + · · · + pn fn
,
p1 + p2 + · · · + pn
dove i pesi pi sono quantità positive. Ad esempio, se p1 , . . . , pn sono i pesi di particelle che
si trovano nelle posizioni f1 , . . . , fn dell’asse x, allora µ rappresenta la posizione del centro di
gravità (baricentro). Nel caso in cui tutti i pesi pi coincidano, la quantità µ coincide con la
media aritmetica. Per una funzione f , possiamo definire la media integrale pesata della funzione f
sull’intervallo [a, b] come
Rb
f (x)p(x) dx
µp = a R b
a p(x) dx
dove la funzione peso p è positiva in [a, b] (la positività di p garantisce che il denominatore
della media sia nonnullo).
Teorema 1.3.2 (Teorema Generalizzato della Media Integrale).
Sia f : [a, b] → R continua in [a, b] e sia p : [a, b] → R continua tale che p(x) > 0.
Allora esiste ξ ∈ [a, b] tale che
Rb
f (x)p(x) dx
f (ξ) = a R b
.
a p(x) dx
Dimostrazione. La dimostrazione è analoga a quella del Teorema della media integrale. Basta
infatti osservare che m ≤ f (x) ≤ M implica mp(x) ≤ f (x)p(x) ≤ M p(x), e, integrando in [a, b],
Z
b
m
a
p(x) dx ≤
Z
b
a
f (x)p(x) dx ≤ M
Z
b
p(x),
a
da cui si deduce che la media integrale pesata appartiene all’insieme immagine f ([a, b]).
18
CAPITOLO 1. L’INTEGRALE
1.4
Integrale con estremi variabili
L’integrale è una funzione degli estremi di integrazione a e b. Per studiare questa
dipendenza, supponiamo l’estremo inferiore fissato al valore a e indichiamo l’estremo
superiore (variabile) con x: quindi, consideriamo la funzione integrale
φ(x) =
Z
x
f (t) dt.
a
La funzione φ è un integrale indefinito della funzione f . Si parla di un integrale indefinito e non dell’integrale indefinito per sottolineare il fatto che si sarebbe potuto
scegliere di fissare l’estremo inferiore a ad un valore diverso.
Formare l’integrale indefinito di una funzione data è una maniera importante per
generare nuovi tipi di funzioni. Ad esempio,
φ(x) =
x
Z
1
dt
t
1
x > 0.
Tale funzione si dimostra essere uguale alla funzione inversa di ex , cioè alla funzione
ln x. La formula precedente può quindi essere considerata la definizione analitica del
logaritmo naturale. Oppure provate, ad esempio, a considerare
φ(x) =
Z
x
[t]dt
0
essendo [t] la funzione parte intera, disegnando il grafico di φ(x).
Parlare dell’integrale indefinito φ(x) non significa certamente conoscerne esplicitamente l’espressione. Sono rarissime le funzioni delle quali si conoscono integrali
indefiniti in forma esplicita. Si conoscono gli integrali indefiniti di tutte quelle funzioni delle quali.... si conoscono gli integrali su qualsiasi intervallo. Ad esempio si
conoscono gli integrali indefiniti dei polinomi. Pur non conoscendo esplicitamente
la φ(x) si possono riconoscere sue proprietà importanti e utili.
Dalla proprietà
Ra
a
f (x)dx = 0 ne deriva che φ(a) = 0. Inoltre si può vedere che
f continua
φ continua.
=⇒
In effetti, si può mostrare qualcosa di più: se f è continua in [a, b], la funzione φ è una
funzione lipschitziana. Infatti, la continuità di f implica la continuità della funzione
|f |. Quindi, per il Teorema di Weierstrass, esiste una costante M > 0 tale che |f (u)| ≤
M per ogni u ∈ [a, b]. Allora,
se x < y,
se x > y,
Z
|φ(x) − φ(y)| = y
f (u) du ≤
x
Z
|φ(x) − φ(y)| = −
y
x
Z
y
|f (u)| du ≤ M (y − x);
x
Z
f (u) du ≤
y
x
|f (u)| du ≤ M (x − y).
1.4. INTEGRALE CON ESTREMI VARIABILI
19
Quindi
|f (u)| ≤ M
|φ(x) − φ(y)| ≤ M |x − y|.
=⇒
In realtà, l’unica ipotesi che serve per garantire la lipschitzianità dell’integrale indefinito φ è l’integrabilità e la limitatezza della funzione f .
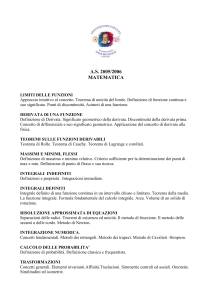
Esempio. Consideriamo la funzione f (x) = sgn x che è continua tratti (ha un punto di salto in
x = 0). Chi è la funzione
Z
x
sgn (t) dt?
φ(x) =
0
Dato che
x>0
⇒
Z
x
Z
sgn (t) dt =
φ(x) =
0
x<0
⇒
x
Z
0
1 dt = x
0
Z
sgn (t) dt =
φ(x) =
x
x
(−1) dt = −x,
0
la funzione φ(x) è la funzione modulo:
Z
φ(x) =
x
sgn (t) dt = |x|.
0
Figura 1.3: Gli integrali indefiniti di sgn (x) e di x
20
1.5
CAPITOLO 1. L’INTEGRALE
Scheda riassuntiva
Aree ed integrali
L’area di una regione decomponibile in rettangoli, detta plurirettangolo, è la somma
delle aree dei rettangoli che lo compongono; inoltre, per ogni regione E, scelti due
plurirettangoli R0 e R00 tali che R0 ⊆ E ⊆ R00 , riesce
A(R0 ) ≤ A(E) ≤ A(R00 ),
dove A(E) indica l’area di E. Quindi, il valore A(E) può essere individuato se si
conoscono due successioni di plurirettangoli Rn0 ed Rn00 tali che
Rn0 ⊆ E ⊆ Rn00 ,
lim A(Rn0 ) = lim A(Rn00 )
n→∞
n→∞
(Attenzione! È stato commesso un abuso: non c’è nessuna garanzia che A(E) abbia senso per
E qualsiasi!)
Area di un sottografico
Data f : [a, b] → R non negativa: il sottografico di f nell’intervallo [a, b]. è la regione
R = {(x, y) | a ≤ x ≤ b,
0 ≤ y ≤ f (x)}
Definizione 1.1.1. Sia f definita in [a, b] e non negativa. L’area del sottografico di f in
[a, b] si chiama integrale della funzione f sull’intervallo [a, b] e si indica con
Z
b
f (x) dx
a
Assegnata una funzione f (x), continua in [a, b], indichiamo con
P = {x0 , x1 , . . . , xn }
dove a = x0 < x1 < . . . < xn = b
mi = min f (x)
Mi = max f (x)
∆xi = xi − xi−1 .
[xi−1 ,xi ]
[xi−1 ,xi ]
L’insieme P è una partizione di [a, b]. Le aree dei plurirettangoli R0 e R00 sono date da
0
A(R ) =
n
X
mi ∆xi ,
n
X
00
A(R ) =
i=1
Mi ∆xi .
i=1
Le successioni di plurettangoli approssimanti dall’esterno e dall’interno si ottengono
aumentando il numero di punti di sottointervalli e facendo in modo che le lunghezze
∆xi = xi+1 − xi tendano a zero man mano che si aumenta il numero di punti.
I. f (x) = costante = γ > 0 in [a, b].
Per qualsiasi scelta di x0 , . . . , xn , si ha
A(R0 ) = A(R00 ) = γ(b − a)
⇒
Z
b
a
γ dx = γ(b − a).
1.5. SCHEDA RIASSUNTIVA
II. f (x) = x in [a, b] con a ≥ 0.
21
Scegliendo xk = a + kh per k = 0, . . . , n dove h = (b − a)/n,
A(Rn0 ) = (b − a)a + (b − a)2
avendo tenuto conto di
n−1
P
k=0
k=
n(n − 1)
2n2
n(n−1)
2
lim A(Rn0 )
n→+∞
=
III. f (x) = x2 in [a, b] con 0 ≤ a < b.
e
n
P
A(Rn00 ) = (b − a)a + (b − a)2
k=
k=1
n(n+1)
.
2
lim A(Rn00 )
n→+∞
n(n + 1)
,
2n2
Passando al limite,
b2 a2
=
−
=
2
2
Z
b
x2 dx.
a
Con gli stessi xk di II,
n−1
(n − 1)(2n − 1)
+ (b − a)2
,
n
6n2
n+1
(n + 1)(2n + 1)
A(Rn00 ) = (b − a) a2 + a(b − a)
+ (b − a)2
.
n
6n2
A(Rn0 ) = (b − a) a2 + a(b − a)
n
P
avendo tenuto conto di
k=1
n
P
k = 21 n(n + 1) e
lim A(Rn0 )
n→+∞
=
k=1
k 2 = 16 n(n + 1)(2n + 1). Quindi
lim A(Rn00 )
n→+∞
b 3 a3 Z b 2
=
−
=
x dx
3
3
a
Definizione analitica dell’integrale
Sia f : [a, b] → R continua. Dividiamo [a, b] tramite una partizione P = {x0 , x1 , . . . , xn }
dove a = x0 < x1 < . . . < xn−1 < xn = b. Scegliamo un punto ξi ∈ [xi−1 , xi ] per ogni i e
formiamo la somma (qui ∆xi := xi − xi−1 )
F :=
n
X
f (ξi )∆xi ≡ f (ξ1 )∆x1 + f (ξ2 )∆x2 + · · · + f (ξn )∆xn .
i=1
ampiezza δ della partizione P :
δ = max{∆x1 , . . . , ∆xn }.
Teorema 1.2.1. (Esistenza dell’integrale per funzioni continue).
Data f : [a, b] → R continua, la somma F tende ad un valore limite per δ → 0 e tale limite è
indipendente dalla scelta di xi , ξj .
Definizione 1.2.2 (Integrale di una funzione continua).
Il valore limite di F per δ → 0 si chiama integrale di f nell’intervallo [a, b] e si indica con
Z
b
a
f (x) dx.
22
CAPITOLO 1. L’INTEGRALE
L’integrale è somma di termini positivi e negativi, in corrispondenza delle zone in cui
la curva è sopra o sotto l’asse x.
La dimostrazione del Teorema 1.2.1 passa per la definizione di:
somme integrali inferiori e superiori :
n
X
s(P ) =
mi ∆xi ,
S(P ) =
i=1
dove P = {x0 , x1 , . . . , xn } è una partizione, mi =
n
X
Mi ∆xi
i=1
min f (x) e Mi = max f (x). Il punto
[xi−1 ,xi ]
[xi−1 ,xi ]
chiave è dimostrare che sup s(P ) = inf S(P ), dove l’estremo superiore e l’estremo inferiore
P
P
sono scelti su tutte le partizioni possibili.
Si possono integrare funzioni non continue? L’integrale può avere senso anche per alcune
funzioni che abbiano delle discontinuità: la costruzione è la stessa a patto di definire
mi =
inf
[xi−1 ,xi ]
f (x)
Mi =
sup f (x)
[xi−1 ,xi ]
Definizione 1.2.3 (Funzioni integrabili).
Una funzione f : [a, b] → R limitata è integrabile in [a, b] se la somma F tende ad un valore limite
per δ → 0, dove δ è l’ampiezza della partizione, e tale limite è indipendente dalla scelta di xi , ξj .
Proprietà dell’integrale
Additività. Per ogni a < c < b e per ogni funzione integrabile f
Z
b
f (x) dx =
c
Z
f (x) dx +
b
f (x) dx.
c
a
a
Z
Rb
Per definire f (x) dx nel caso a ≥ b in modo che sia preservata l’additività,
a
Z
a
f (x) dx := 0
a
Z
e
b
f (x) dx := −
Z
a
f (x) dx
b < a.
b
a
Linearità. Per ogni α, β ∈ R e per ogni coppia di funzioni f, g integrabili
α
Z
b
f (x) dx + β
Z
b
g(x) dx =
b
[αf (x) + βg(x)] dx.
a
a
a
Z
Monotonı́a. Per ogni coppia di funzioni f, g integrabili
f ≥g
in [a, b]
=⇒
Z
b
f (x) dx ≥
a
Da questa proprietà discende
Z
Zb
b
f (x) dx ≤ |f (x)| dx.
a
a
Z
b
a
g(x) dx.
1.5. SCHEDA RIASSUNTIVA
23
Teorema della media integrale
Teorema 1.3.1 (Teorema della Media Integrale).
Sia f : [a, b] → R una funzione continua in [a, b]. Allora esiste un valore ξ ∈ [a, b] tale che
1 Zb
f (ξ) =
f (x) dx.
b−a a
Il termine a secondo membro è la media integrale di f in [a, b].
Controesempio. Se f non è continua in [a, b] la conclusione può non valere: ad esempio, f (x) = sgn x in [−1, 2],
Teorema 1.3.2 (Teorema Generalizzato della Media Integrale).
Sia f : [a, b] → R continua in [a, b] e sia p : [a, b] → R continua tale che p(x) > 0.
Allora esiste ξ ∈ [a, b] tale che
Rb
f (x)p(x) dx
f (ξ) = a R b
.
a p(x) dx
Integrale con estremi variabili
Fissato il valore a, consideriamo la funzione integrale
φ(x) =
Z
x
f (t) dt.
a
La funzione φ è un integrale indefinito della funzione f .
f continua
=⇒
φ continua.
In effetti, vale di più: se f è limitata in [a, b], φ è una funzione lipschitziana.
24
CAPITOLO 1. L’INTEGRALE
Capitolo 2
Derivate, derivate e derivate
Il concetto di derivata è suggerito dalla nozione intuitiva di retta tangente al grafico di
una funzione y = f (x) in un punto P = (x, f (x)). La retta tangente è caratterizzata
dal passaggio per il punto P (assegnato) e dalla sua pendenza, individuata dall’angolo
α che la retta forma con l’asse x. Come si può determinare l’angolo α a partire dalla
descrizione analitica della funzione f ? La conoscenza del punto P , cioè del valore
della funzione f nel punto x non è sufficiente, dato che per un punto passano infinite
rette. D’altra parte, non serve nemmeno conoscere il comportamento della funzione
f dappertutto: è sufficiente conoscere la funzione in un intorno qualsiasi del punto,
anche piccolo.1 In effetti, dietro la definizione rigorosa di retta tangente si nasconde un
procedimento di limite.
Il problema di calcolare la direzione tangente, o di “derivazione”, ha interessato i
matematici fin dal sedicesimo secolo per risolvere problemi di ottimizzazione, cioè per
determinare massimi e minimi in problemi provenienti dalla geometria, dalla meccanica e dall’ottica.Un secondo problema fondamentale che ha portato al concetto di
“derivata” è quello di formulare in modo matematicamente preciso il concetto intuitivo di velocità istantanea in un moto arbitrario non uniforme. Iniziamo da quest’ultimo
problema.
La derivata come velocità
Consideriamo un punto che si muova lungo l’asse y. Il moto del punto è noto se si
conosce ad ogni istante t la posizione y, cioè se si conosce la funzione y = f (t). Se
la funzione f è lineare, ossia f (t) = ct + b, si parla di moto uniforme con velocità c. La
velocità c è il rapporto tra la distanza percorsa nell’intervallo di tempo [t, s] e la durata
1
Questa affermazione si può esprimere dicendo che la retta tangente individua una proprietà locale della funzione f , dato che dipende solo dal comportamento della funzione f “vicino” al punto
(x, f (x)). Al contrario si parla di proprietà globali per proprietà che dipendono dal comportamento in
tutto l’insieme di definizione.
25
26
CAPITOLO 2. DERIVATE, DERIVATE E DERIVATE
di questo intervallo:
f (s) − f (t)
.
s−t
Il moto è uniforme perchè la velocità è costante (non dipende dalla scelta degli istanti t
e s).
(t)
Se il moto non è uniforme, la quantità f (s)−f
esprime la velocità media del punto
s−t
nell’intervallo di tempo [t, s]. Se la velocità media tende ad un limite finito per s → t, il
valore del limite è detto velocità istantanea:
c=
velocità istantanea:
v(t) = lim
s→t
f (s) − f (t)
.
s−t
Se il limite non esiste, la velocità istantanea non è definita.
Un esempio semplice è il moto di un corpo in caduta libera, cioè sottoposto
alla sola forza di gravità. Sperimentalmente si ottiene che la distanza percorsa al tempo t da un corpo, lasciato cadere da fermo al tempo t = 0, è
proporzionale a t2 ; si rappresenta quindi con una funzione della forma
y = f (t) = at2
(a > 0).
La velocità v all’istante t si ottiene quindi calcolando il limite seguente
v(t) = lim
s→t
f (s) − f (t)
as2 − at2
= lim
= lim a(s + t) = 2at.
s→t
s→t
s−t
s−t
Quindi la velocità di un corpo in caduta libera cresce in modo proporzionale al
tempo.
Nello studio del moto di un punto è utile osservare anche la variazione di velocità.
Il procedimento è simile al precedente. L’accelerazione media è il rapporto tra la variazione di velocità nell’intervallo di tempo [t, s] e la durata dell’intervallo, cioè è data
da (v(s) − v(t))/(s − t). L’accelerazione (istantanea) a è il limite dell’accelerazione media
per s → t, cioè
accelerazione istantanea:
a(t) = lim
s→t
v(s) − v(t)
.
s−t
Nel caso di moto uniforme f (t) = ct + b,
⇒
v(t) = c
a(t) = lim
s→t
c−c
= 0,
s−t
cioè l’accelerazione è nulla; nel caso del corpo in caduta libera f (t) = at2 ,
v(t) = 2at
⇒
cioè il moto è uniformente accelerato.
a(t) = lim
s→t
2as − 2at
= 2a,
s−t
2.1. DEFINIZIONE DI DERIVATA
2.1
27
Definizione di derivata
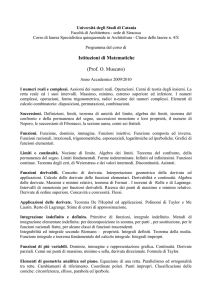
Data una funzione y = f (x), consideriamo il problema di determinare la retta tangente
al grafico della funzione nel punto P = (x, f (x)). L’idea è la seguente: dato un secondo
punto P1 = (x1 , f (x1 )) sul grafico di f , per P e P1 passa un’unica retta, detta retta
secante. Se, muovendo P1 verso P , la retta secante tende ad una posizione limite, tale
retta limite è la retta tangente. Formuliamo ora il processo geometrico di limite che
abbiamo appena visto in modo analiticamente rigoroso. Siano P = (x, f (x)) e P1 =
(x1 , f (x1 )), il coefficiente angolare della retta secante2 per P e P1 è
rapporto incrementale:
m(P, P1 ) =
f (x1 ) − f (x)
.
x1 − x
(x)
Il rapporto f (xx11)−f
è detto rapporto incrementale. Le differenze f (x1 ) − f (x) e x1 − x
−x
si indicano rispettivamente anche con ∆f e ∆x e corrispondono agli incrementi della
variabile dipendente e di quella indipendente.
Definizione 2.1.1 Sia f : [a, b] → R. La funzione f si dice derivabile in x ∈ [a, b] se esiste
finito il limite
f (x1 ) − f (x)
lim
.
(2.1)
x1 →x
x1 − x
Se esiste, il limite si indica con f 0 (x) e si dice derivata (prima) della funzione f in x. Se la
funzione f è derivabile in tutti i punti dell’intervallo I, si dice che f è derivabile in I.
Figura 2.1: Il grafico di una funzione con tangente e secanti.
Per la derivata si usano anche altri simboli (l’importante è capirsi!)
df
dy
= Df =
= ẏ = · · · ,
dx
dx
e il limite (2.1) può essere scritto in maniere equivalenti
f0 =
lim
x →x
1
2
f (x1 ) − f (x)
f (x + h) − f (x)
∆f
= lim
= lim
= ···
∆x→0 ∆x
h→0
x1 − x
h
Si ricordi che il coefficiente angolare m della retta passante per i punti di coordinate (x, y) e (x1 , y1 )
è dato da m = (y1 − y)/(x1 − x).
28
CAPITOLO 2. DERIVATE, DERIVATE E DERIVATE
Determinare una derivata vuol dire fare (con successo) un limite: i limiti si fanno
nei punti interni ad un intervallo di definizione. Negli estremi si fanno al più limiti sinistri o limiti destri. In punti isolati non si fanno neanche i limiti..., quindi
non si parlerà mai di derivata, cosa del resto suggerita dall’idea di cercare la retta tangente: q
chi penserebbe di fare la tangente in un singolo punto? Ad esempio,
√
la funzione x − x è definita nel maxi intervallo [1, +∞) e nel povero singolo
punto x0 = 0. Sarà derivabile nel punto x0 = 0 ? È una domanda priva di senso!
Dato che la derivata f 0 dipende dal punto di derivazione, la f 0 è essa stessa una
funzione, il cui insieme di definizione è contenuto nell’insieme di definizione della
funzione f (non è detto che i due domini di definizione coincidano).
La definizione analitica di derivata è chiara: si tratta semplicemente del limite di
una funzione opportuna, il rapporto incrementale. Meno chiaro è come si possa calcolare esplicitamente la funzione derivata. In generale, non è possibile calcolare tale
funzione semplicemente ponendo l’incremento h = 0, dato che questo vorrebbe dire
“dividere per zero”!
Partiamo da due casi proprio semplici:
f (x) = c
f (x) = x
f 0 (x) = lim
=⇒
h→0
f 0 (x) = lim
=⇒
h→0
c−c
= 0,
h
(x + h) − x
h
= lim = 1.
h→0
h
h
Nel caso di f (x) = x2 , si ha
(x + h)2 − x2
2xh + h2
= lim
= lim 2x + h = 2x.
h→0
h→0
h→0
h
h
√
Consideriamo f (x) = x per x ≥ 0. Il rapporto incrementale è
√
√
√
√ √
√
x+h− x
x+h− x x+h+ x
1
√
=
√ =√
√
h
h
x+h+ x
x+h+ x
f 0 (x) = lim
Passando al limite per h → 0 si ottiene
√
lim
h→0
x+h−
h
√
x
=
+∞
x = 0,
1
√
2 x
x > 0.
Nel punto√x = 0 la funzione ha una singolarità. Pur essendo definita e continua,√la
funzione x non è derivabile in x = 0. In questo caso, la retta tangente al grafico di x
nel punto x = 0 è verticale.
Ci sono funzioni non derivabili con comportamenti ben diversi da questo. Ad esempio
(
f (x) = |x|
e
g(x) =
x sin
0
1
x
x 6= 0,
x=0
2.1. DEFINIZIONE DI DERIVATA
29
Figura 2.2: Le funzioni x2 e
√
x e le loro derivate.
sono entrambe continue, ma non derivabili in 0. Per la funzione f , la non derivabilità in 0 è
dovuta al fatto che i limiti destro e sinistro del rapporto incrementale esistono finiti ma non
coincidono (il rapporto incrementale ha una discontinuità di salto in 0)
lim
x→0+
|h|
|h|
= 1 6= −1 = lim
.
−
h
h
x→0
Nel grafico, un comportamento di questo genere si traduce nella presenza di un punto angoloso.
Nel caso della funzione g, il rapporto incrementale ha l’espressione
g(h) − g(0)
h sin(1/h) − 0
1
=
= sin
.
h
h
h
Come si è già visto, questa funzione non ha limite (né destro né sinistro) per h → 0. In termini
di grafico (controllare di persona!), questa funzione ha delle variazioni sempre più rapide di
pendenza man mano che ci sia avvicina ad x = 0.
Prime conseguenze della derivabilità
1. Derivabilità ⇒ Continuità. Se una funzione f è derivabile in x0 , allora è anche continua in x0 . Infatti la continuità della funzione f nel punto x0 è equivalente all’affermazione x→x
lim (f (x) − f (x0 )) = 0, e, dato che
0
f (x) − f (x0 ) =
f (x) − f (x0 )
(x − x0 ),
x − x0
passando al limite per x → x0 si ottiene la conclusione.
2. Equazione della retta tangente. Data f : [a, b] → R, sia x0 ∈ [a, b] un punto in cui f è
derivabile, la retta tangente è, per definizione, la retta passante per il punto (x0 , f (x0 )),
il cui coefficiente angolare è pari a f 0 (x0 )
retta tangente:
y = f (x0 ) + f 0 (x0 )(x − x0 ).
30
CAPITOLO 2. DERIVATE, DERIVATE E DERIVATE
Fissato il punto x0 , il polinomio di primo grado in x a secondo membro può essere
visto come un’approssimazione della funzione f vicino al punto x0 .
Nel sostituire la funzione con la sua retta tangente l’errore Rx0 , è pari a
Rx0 (x) = f (x) − f (x0 ) − f 0 (x0 )(x − x0 ).
Per x → x0 , l’errore che si commette tende a zero, cioè
lim Rx0 (x) = lim (f (x) − f (x0 ) − f 0 (x0 )(x − x0 )) = 0.
x→x0
x→x0
(2.2)
Ma (attenzione!) lo stesso è vero per qualsiasi altra retta per il punto (x0 , f (x0 )), infatti
lim (f (x) − f (x0 ) − m(x − x0 )) = 0
x→x0
∀m ∈ R.
Quindi la proprietà (2.2) non è granché indicativa! Il fatto fondamentale è che per Rx0 vale
lim
x→x0
Rx0 (x)
f (x) − f (x0 ) − f 0 (x0 )(x − x0 )
= lim
= 0.
x→x0
x − x0
x − x0
(2.3)
Questa condizione è più restrittiva della precedente (perché?) e, tra le funzioni lineari, è verificata solo da quella che rappresenta la retta tangente ad f in x0 . Tutte le proprietà interessanti
che si deducono dalla derivata di una funzione, in sostanza, provengono dalla (2.3). In effetti,
in maniera equivalente, avremmo potuto dire che una funzione è derivabile in x0 se esiste un
valore ` ∈ R per cui vale
f (x) − f (x0 ) − `(x − x0 )
lim
= 0.
x→x0
x − x0
Il valore ` è pari a f 0 (x0 ). Da questo punto di vista la derivabilità di una funzione descrive la
proprietà di una funzione di potere essere “ben approssimata” con una funzione affine, cioé
del tipo y = mx + q, nell’intorno di un punto x0 .
2.2 Prime formule di derivazione
Polinomi e potenze
Si è già visto che valgono le regole di derivazione
(c)0 = 0,
(x)0 = 1,
(x2 )0 = 2x.
Per un generico polinomio di grado 2, f (x) = ax2 + bx + c si può procedere in modo
analogo. Il rapporto incrementale è
f (x + h) − f (x)
a(x + h)2 + b(x + h) + c − ax2 − bx − c
=
= 2ax + b + h.
h
h
Quindi, passando al limite per h → 0, si ottiene
(ax2 + bx + c)0 = lim 2ax + b + h = 2ax + b.
h→0
2.2. PRIME FORMULE DI DERIVAZIONE
31
In modo simile è possibile derivare un qualsiasi polinomio. Calcoliamo prima di tutto
la derivata della funzione f (x) = xn dove n ∈ N. Il rapporto incrementale si può
scrivere come
f (x1 ) − f (x)
xn − xn
= 1
= xn−1
+ xn−2
x + · · · + xn−1 ,
1
1
x1 − x
x1 − x
dato che xn1 − xn = (x1 − x)(xn−1
+ xn−2
x + · · · + xn−1 ) per ogni x1 , x ∈ R. Passando
1
1
al limite per x1 → x, ciascuno dei termini tende a xn−1 e quindi, dato che si tratta di n
termini, si ottiene
(xn )0 = nxn−1
∀n ∈ N,
(2.4)
(per n = 1, 2 si ottengono le relazioni già note per x e x2 ).
Una volta noto che è possibile calcolare esplicitamente la derivata di un qualsiasi
polinomio, è naturale chiedersi se sia possibile fare lo stesso per funzioni razionali.
Partiamo dal caso più semplice: f (x) = 1/x
1
1
−
f (x1 ) − f (x)
x − x1
1
= x1 x =
=−
.
x1 − x
x1 − x
x1 x(x1 − x)
x1 x
Quindi passando al limite x1 → x, si ottiene la formula
0
1
x
=−
1
.
x2
Allo stesso modo è possibile trattare funzioni del tipo f (x) =
1
1
xβ
con β ∈ N:
1
− xβ
xβ − xβ1
f (x1 ) − f (x)
xβ−1 + xβ−2
x + · · · + xβ−1
xβ
1
= β
= 1
=− 1
.
x1 − x
x1 − x
x1 xβ (x1 − x)
xβ1 xβ
Passando al limite per x1 → x, si ottiene
x
−β 0
1
≡
xβ
0
=−
β
xβ+1
≡ −βx−β−1
∀β ∈ N.
(2.5)
Vedremo più avanti come si possa calcolare la derivata di una generica funzione razionale.
Le formule (2.4) e (2.5) si possono sintetizzare nell’unica formula
(xα )0 = αxα−1
∀ α ∈ Z.
Dimostriamo che è possibile scegliere α ∈ Q ottenendo ancora la formula (2.6).
Supponiamo la funzione f (x) = xα con α = p/q con p e q interi (q 6= 0). Consideriamo, per semplicità, il caso p, q > 0. Il rapporto incrementale è
p/q
x − xp/q
xα1 − xα
= 1
.
x1 − x
x1 − x
(2.6)
32
CAPITOLO 2. DERIVATE, DERIVATE E DERIVATE
1/q
Ponendo x1
= ξ1 e x1/q = ξ, otteniamo
xα1 − xα
ξp − ξp
ξ1p−1 + ξ1p−2 ξ + · · · + ξ p−1
.
= 1q
=
x1 − x
ξ1 − ξ q
ξ1q−1 + ξ1q−2 ξ + · · · + ξ q−1
Passando al limite per x1 → x, cioè per ξ1 → ξ, si ottiene
xα1 − xα
ξ p−1 + ξ1p−2 ξ + · · · + ξ p−1
p
p p −1
p ξ p−1
= lim 1q−1
= ξ p−q = x q ,
=
q−2
q−1
q−1
x1 →x x1 − x
ξ1 →ξ ξ
qξ
q
q
+ ξ1 ξ + · · · + ξ
1
lim
cioè la formula (2.6) per α razionale positivo.
In generale si può dimostrare che (2.6) vale per ogni α ∈ R, cioè
(xα )0 = αxα−1
∀ α ∈ R.
(2.7)
Funzioni trigonometriche
Grazie alle formule di addizione è possibile scrivere i rapporti incrementali di sin x e
cos x come
sin(x + h) − sin x
sin x cos h + cos x sin h − sin x
=
h
h
cos h − 1
sin h
= sin x
+ cos x
,
h
h
cos(x + h) − cos x
cos x cos h − sin x sin h − cos x
=
h
h
cos h − 1
sin h
= cos xx
− sin x
.
h
h
Passando al limite per h → 0 e ricordando che lim cos hh−1 = 0 e lim sinh h = 1, si deducono
h→0
h→0
le formule
(sin x)0 = cos x
e
(cos x)0 = − sin x.
Figura 2.3: Le funzioni sin x e ln x e le loro derivate.
2.3. REGOLE FONDAMENTALI DI DERIVAZIONE
33
Esponenziale e logaritmo
Come ultimo esempio, consideriamo le funzioni ex e ln x. Nel caso dell’esponenziale,
il rapporto incrementale è
ex+h − ex
eh − 1
f (x + h) − f (x)
=
= ex
.
h
h
h
eh −1
h→0 h
Passando al limite per h → 0 e usando il limite notevole lim
= 1,
(ex )0 = ex ,
che esprime una proprietà notevole dell’esponenziale (con base e): la derivata di ex è la
stessa funzione ex . In altri termini, la funzione f (x) = ex risolve l’equazione (differenziale) f 0 = f .
Il rapporto incrementale del logaritmo naturale si riscrive come
f (x + h) − f (x)
ln(x + h) − ln x
1
x+h
=
= ln
h
h
h
x
!
!
1
h
= ln 1 +
.
h
x
Quindi, ponendo t = h/x (x è fissato) e usando il limite notevole lim ln(1+t)
= 1,
t
t→0
f (x + h) − f (x)
1
h
lim
= lim ln 1 +
h→0
h→0 h
h
x
!
1 ln(1 + t)
1
= .
t→0 x
t
x
= lim
2.3 Regole fondamentali di derivazione
Come nel caso degli integrali, dalla definizione dell’operazione di derivazione, discendono alcune regole basilari che permettono di derivare una classe ampia di funzioni, a
partire da una classe più ristretta di derivate note.
Linearità. Dati α, β ∈ R e f, g derivabili, allora anche αf + βg è derivabile e
φ(x) = αf (x) + βg(x)
=⇒
φ0 (x) = αf 0 (x) + βg 0 (x).
Per la dimostrazione di questa proprietà basta osservare che il rapporto incrementale della
funzione φ si può riscrivere come
φ(x + h) − φ(x)
αf (x + h) + βg(x + h) − αf (x) − βg(x)
=
h
h
f (x + h) − f (x)
g(x + h) − g(x)
=α
+β
,
h
h
e passare al limite per h → 0, applicando le proprietà note dei limiti.
34
CAPITOLO 2. DERIVATE, DERIVATE E DERIVATE
Ad esempio, la derivata di un polinomio p(x) = an xn + an−1 xn−1 + · · · + a0 si
può calcolare senza bisogno di passare per il limite del rapporto incrementale, ma
semplicemente usando la linearità della derivazione e la formula (xk )0 = kxk−1 :
(p(x))0 = an (xn )0 + an−1 (xn−1 )0 + · · · + a1 (x)0 + (a0 )0
= nan xn−1 + (n − 1)an−1 xn−2 + · · · + a1 .
Derivata di un prodotto e di un rapporto.
Derivata di un prodotto. Siano f, g derivabili, allora anche f g è derivabile e
φ(x) = f (x)g(x)
=⇒
φ0 (x) = f (x)g 0 (x) + f 0 (x)g(x).
Per quanto bizzaro possa sembrare, questa è la maniera corretta di derivare un prodotto di
funzioni. Per convincersi (cioè per dimostrare la formula), scriviamo il rapporto incrementale
φ(x + h) − φ(x)
f (x + h)g(x + h) − f (x)g(x)
=
h
h
g(x + h) − g(x) f (x + h) − f (x)
= f (x + h)
+
g(x),
h
h
(si è aggiunto e sottratto a numeratore la quantità f (x + h)g(x)). Per h → 0, la conclusione.
Ad esempio, per calcolare la derivata della funzione φ(x) = x sin x,
(x sin x)0 = x(sin x)0 + (x)0 sin x = x cos x + sin x,
avendo usato le formule di derivazione per x e sin x.
Derivata di un rapporto. Se f e g sono derivabili (g 6= 0), allora anche il rapporto f /g è
derivabile e
f (x)
f 0 (x)g(x) − f (x)g 0 (x)
0
φ(x) =
=⇒ φ (x) =
.
g(x)
[g(x)]2
Se l’altra formula pareva folle, questa non ne parliamo... Ma è un fatto della vita: per derivare
un rapporto, bisogna procedere in questo modo. La dimostrazione discende, ovviamente, dal
rapporto incrementale per la funzione rapporto. Niente di sorprendente. La strategia è di
riscrivere questo rapporto incrementale in modo che compaiano quelli delle funzioni f e g:
1 f (x + h) f (x)
f (x + h)g(x) − f (x)g(x + h)
φ(x + h) − φ(x)
=
−
=
h
h g(x + h)
g(x)
hg(x)g(x + h)
f (x + h)g(x) − f (x)g(x) + f (x)g(x) − f (x)g(x + h)
=
hg(x)g(x + h)
f (x + h) − f (x)
g(x + h) − g(x)
1
=
g(x) − f (x)
.
g(x)g(x + h)
h
h
Per h → 0, si ottiene la conclusione.
2.3. REGOLE FONDAMENTALI DI DERIVAZIONE
35
Ad esempio, la derivata di f (x) = tan x è data da
sin x 0 (sin x)0 cos x − sin x(cos x)0
=
cos x
cos2 x
cos x cos x − sin x(− sin x)
cos2 x + sin2 x
1
=
=
=
.
2
2
cos x
cos x
cos2 x
(tan x)0 =
Anche per derivare funzioni razionali basta applicare la formula di derivazione del
rapporto. Ad esempio,
x2
x+1
!0
2x(x + 1) − x2 · 1
x(x + 2)
=
=
.
2
(x + 1)
(x + 1)2
Analogamente per funzioni razionali generali.
Abbiamo sviluppato un certo numero di regole per derivare una classe ampia di
funzioni: polinomi, funzioni razionali, alcune funzioni trigonometriche, alcune funzioni esponenziali... Vogliamo ora estendere ulteriormente le classi di funzioni di cui
sappiamo calcolare esplicitamente la derivata. √In particolare vogliamo sapere come
2
derivare funzioni composte (ad esempio, ex , 1 + sin2 x, . . .) e funzioni inverse (ad
esempio, arcsin x, arccos x, arctan x, . . .).
Derivata di una funzione composta. Siano g, h derivabili, allora la funzione composta f = h ◦ g è derivabile e vale la formula3
f 0 (x) = h0 (g(x)) g 0 (x).
(derivata di funzione composta)
(2.8)
Quindi per derivare una funzione composta, bisogna derivare ciascuna funzione e fare
il prodotto di ciascun termine, calcolato nel valore opportuno. Usare concretamente
questa regola è molto più semplice di quel che possa sembrare. Vediamo, ad esempio,
2
come calcolare la derivata di f (x) = ex .
i. Riconosciamo la struttura di funzione composta:
f (x) = h(g(x))
dove
g(x) = x2 ,
h(s) = es .
ii. Dato che g(x) = x2 e h(s) = es , si ha g 0 (x) = 2x e h0 (s) = es .
iii. Ora basta fare il prodotto delle derivate, calcolando la funzione h0 in s = g(x) = x2 :
D ex
2
2
= 2xex .
√
√
Analogamente, dato che D(sin x) = cos x e D( s) = 1/(2 s),
D
3
√
cos x
1 + sin x = √
.
2 1 + sin x
In inglese, questa regola è comunemente nota come chain rule.
36
CAPITOLO 2. DERIVATE, DERIVATE E DERIVATE
Se la funzione è composta da più di due funzioni, si itera il procedimento:
D (h(g(f (x))))) = h0 (g(f (x))) · g 0 (f (x)) · f 0 (x).
Ad esempio,
1
sin x cos x
1 + sin x = √
· 2 sin x · cos x = √
.
2
2 1 + sin x
1 + sin2 x
q
D
2
C’è un unico modo per imparare l’uso concreto di questa formula ed è di riempire
un buon numero di fogli di derivate di funzioni composte, possibilmente con l’occhio
vigile di qualcuno che controlli l’esattezza del procedimento.
Per dimostrare la formula (2.8), scriviamo il rapporto incrementale
0
∆f
∆h
=
=
∆h ∆g
∆x
∆x
∆g ∆x
dove
se
∆g = 0,
se
∆g 6= 0,
(2.9)
∆x = x2 − x1
∆f = f (x2 ) − f (x1 )
∆h = h(g(x2 )) − h(g(x1 ))
∆g = g(x2 ) − g(x1 ).
Se, per x2 vicino ad x1 , si ha ∆g 6= 0, la conclusione segue da
∆f
∆h ∆g
∆h
∆g
= lim
= lim
lim
= h0 (g(x1 )) g 0 (x1 ),
∆x→0 ∆x
∆x→0 ∆g ∆x
∆g→0 ∆g ∆x→0 ∆x
lim
dato che ∆g → 0 quando ∆x → 0. Se in ogni intorno di x1 ci sono punti per cui ∆g = 0,
necessariamente la derivata di g in x1 deve essere nulla (come si dimostra?), e quindi vale
la conclusione, dato che entrambe le rappresentazioni di ∆f /∆x in (2.9) tendono a zero per
∆x → 0.
Applicando la formula di derivazione di funzioni composte (2.8) è possibile ottenere le formule per le derivate di
xα
(α ∈ R)
ax
e
(a > 0).
b
Per entrambe è utile osservare che eb ln a = eln a = ab . Questa maniera di scrivere un
esponenziale in base diversa da e tramite un esponenziale con base e è estremamente
utile. A eterna memoria, riscriviamo la formula
ab = eb ln a
∀ a > 0, b ∈ R.
(2.10)
Usando la formula (2.10),
α
α ln x
D(x ) = D(e
α α ln x αxα
)= e
=
= α xα−1
x
x
∀α ∈ R.
2.3. REGOLE FONDAMENTALI DI DERIVAZIONE
37
Analogamente,
D(ax ) = D(ex ln a ) = ex ln a ln a = ax ln a
∀ a > 0.
Derivata di una funzione inversa.
Una conseguenza della formula di derivazione di funzione composta è la formula
della derivata dell’inversa di una funzione. La prima domanda naturale da porsi è: se
la funzione f è invertibile e derivabile, lo è anche la funzione inversa? La risposta è immediata se si pensa a come si ottiene il grafico della funzione inversa a partire da quello
della funzione originale e se si ricorda il significato geometrico della derivabilità. La
funzione f è derivabile in x se in tale punto il grafico ammette tangente e tale retta tangente non è verticale (quando la tangente al grafico è verticale, il rapporto incrementale
tende ad ∞). Il grafico di f −1 si può ottenere da quello della f tramite un ribaltamento
attorno alla bisettrice del primo e del terzo quadrante. In questa operazione di ribaltamento, rette orizzontali diventano verticali e viceversa. Quindi un punto in cui la
tangente al grafico di f è orizzontale (cioè f 0 (x) = 0), corrisponde, nel grafico di f −1 ,
ad un punto in cui la tangente è verticale e viceversa. Questo significa che:
la funzione inversa f −1 è derivabile nel punto y = f (x) se e solo se f 0 (x) 6= 0.
Figura 2.4: Una funzione e la sua inversa, con le relative tangenti.
Ad esempio, funzioni f derivabili con f 0 (x) > 0 dappertutto, hanno sempre inversa
derivabile in ogni punto del loro insieme di definizione. Come si può calcolare la
derivata della funzione inversa f −1 ? Dato che f (f −1 (x)) = x, applicando la formula di
derivazione delle funzioni composte e derivando membro a membro,
f (f −1 (x)) = x
=⇒
f 0 (f −1 (x))(f −1 )0 (x) = 1.
Esplicitando (f −1 )0 (x), si ottiene la
formula di derivazione della funzione inversa :
(f −1 )0 (x) =
1
f 0 (f −1 (x))
.
(2.11)
38
CAPITOLO 2. DERIVATE, DERIVATE E DERIVATE
Verifichiamo questa formula, calcolando di nuovo la derivata della funzione f (x) =
ln x (in precedenza la formula si è ottenuta in modo diverso). In questo caso
f (x) = ex
f −1 (x) = ln x
)
f 0 (f −1 (x)) = eln x = x
⇒
⇒
(ln x)0 =
1
.
x
Ovviamente non sarebbe una grande idea aver dimostrato questa formula se ci portasse a formule già note. Consideriamo le inverse delle funzioni trigonometriche e
calcoliamone
(chi non ne ricordasse le definizioni,
vada a rivederle). Dato
√ le derivate
√
2
2
che cos x = 1 − sin x per x ∈ [−π/2, π/2] e sin x = 1 − cos x per x ∈ [0, π], si ha
f (x) = sin x
f −1 (x) = arcsin x
f (x) = cos x
f
−1
(x) = arccos x
⇒
f 0 (f −1 (x)) = cos(arcsin x) =
⇒
(arcsin x)0 = √
⇒
1
1 − x2
√
1 − x2
∀x ∈ (−1, 1),
√
f 0 (f −1 (x)) = − sin(arccos x) = − 1 − x2
⇒ (arccos x)0 = − √
1
1 − x2
∀x ∈ (−1, 1).
Per quanto riguarda la funzione arctan x, è utile ricordare che
D(tan x) =
cos2 x + sin2 x
1
=
= 1 + tan2 x.
2
cos x
cos2 x
Quindi
f (x) = tan x
f −1 (x) = arctan x
⇒
f 0 (f −1 (x)) = 1 + tan2 (arctan x) = 1 + x2
⇒
(arctan x)0 =
1
.
1 + x2
Ultima, ma non ultima, la formula della derivata di f −1 (x) = loga x con a > 0 qualsiasi:
f (x) = ax
f
−1
(x) = loga x
⇒
f 0 (f −1 (x)) = aloga x ln a = x ln a
⇒
(loga x)0 =
1
.
x ln a
Ora siamo soddisfatti: sappiamo derivare un numero di funzioni molto ampio.
2.4. DERIVATE SUCCESSIVE
2.4
39
Derivate successive
L’operazione di derivazione porta da una funzione f ad una nuova funzione f 0 , la
funzione derivata. E’ naturale chiedersi se questa funzione derivata f 0 possa essere a
sua volta derivata.
Definizione 2.4.1 (Derivate seconda).
Sia f : [a, b] → R derivabile in [a, b] e sia x ∈ [a, b]. Se esiste finito il limite
f 0 (x + h) − f 0 (x)
,
h→0
h
(2.12)
lim
la funzione f è derivabile due volte in x, il limite si indica con f 00 (x) e si chiama derivata
seconda di f in x.
Come sempre, se f è derivabile due volte in tutti i punti dell’intervallo I, si dice che f è
derivabile due volte in I.
Per la derivata seconda si usano anche le notazioni
f 00 =
d2 f
d2 y
2
=
D
f
=
= ···,
dx2
dx2
Analogamente, nel caso di una funzione derivabile due volte, è possibile domandarsi se esista la derivata terza f 000 . Iterando il procedimento si può parlare di derivata
n−esima, che si indica4 con f (n) . Qualche volta si indica la funzione f come la sua
derivata 0−esima: f (0) ≡ f .
Se la variabile indipendente è interpretata come il tempo t e il valore f (t) rappresenta la posizione al tempo t di un punto, il significato fisico della derivata seconda
è la rapidità di cambiamento della velocità, cioè l’accelerazione.
La maniera operativa di calcolare derivate successive è semplicemente di iterare le
formule note per la derivazione. Ad esempio,
f (x) = x3 + x
⇒
f 0 (x) = 3x2 + 1
⇒
f 00 (x) = 6x
⇒
f 000 (x) = 6.
Le derivate di ordine superiore al terzo della funzione f (x) = x3 + x esistono e sono
tutte nulle. In generale, un polinomio p di grado n è infinitamente derivabile (cioè
ammette derivate di qualsiasi ordine), e le sue derivate di ordine maggiore o uguale
ad n + 1 sono tutte nulle. Anche le funzioni sin x e cos x sono infinitamente derivabili:
D(sin x) = cos x, D2 (sin x) = − sin x, D3 (sin x) = − cos x, D4 (sin x) = sin x
D(cos x) = − sin x, D2 (cos x) = − cos x, D3 (cos x) = sin x, D4 (cos x) = cos x.
4
Simboli equivalenti sono
f (n) ≡ Dn f ≡
dn f
dn y
=
.
dxn
dxn
40
CAPITOLO 2. DERIVATE, DERIVATE E DERIVATE
Le derivate successive ripetono lo stesso schema in modo periodico, ossia
D2n−1 (sin x) = (−1)n+1 cos x,
D2n−1 (cos x) = (−1)n sin x,
D2n (sin x) = (−1)n sin x,
D2n (cos x) = (−1)n cos x,
∀n ∈ N.
Pensando al caso di polinomi e funzioni trigonometriche, si potrebbe essere indotti a
credere che tutte le funzioni siano infinitamente derivabili. Un esempio di funzione
che
sia derivabile due volte in un punto, ma non tre volte è f (x) = x5/2 . Infatti f 00 (x) =
√
15
x che, come sappiamo, non è derivabile in zero.
4
Esperimento al calcolatore. Chiedete a Gnuplot di disegnare il grafico delle funzioni
f (x) = x4 ,
f 0 (x) = 4x3 ,
f 00 (x) = 12x2 ,
f 000 (x) = 24x
tramite i comandi
gnuplot> set xrange [-1:1]
gnuplot> plot x**4,4*x**3,12*x**2,24*x
e riflettete sui legami che intercorrono tra i loro grafici...
Figura 2.5: I grafici di y = x4 , y 0 = 4x3 , y 00 = 12x2 , y 000 = 24x.
Notazioni. Comunemente sono usate le notazioni (k ∈ N)
C(I) ≡ C 0 (I) := {funzioni continue in I}
C 1 (I) := {funzioni derivabili in I e con f 0 ∈ C(I)}
C k (I) := {funzioni derivabili k volte in I e con f (k) ∈ C(I)}
C ∞ (I) := {funzioni infinitamente derivabili in I}.
2.5.
∗
DERIVATE PARZIALI
41
Ognuno dei simboli precedenti indica un insieme di funzioni. Gli insiemi di funzioni hanno più struttura di quel che si potrebbe immaginare a prima vista: è
possibile sommare, moltiplicare funzioni, ottenendo nuove funzioni. A partire
da questa osservazione, si sviluppano molti rami estremamente interessanti della
matematica, ma, come spesso accade, il tempo è tiranno...
Primo cenno alle equazioni differenziali. Tramite il concetto di derivata è possibile definire delle funzioni. Ad esempio, le funzioni trigonometriche possono essere
caratterizzate tramite equazioni differenziali: dalle regole di derivazione di sin x e cos x,
f (x) = sin x
o f (x) = cos x
=⇒
f 00 + f = 0.
La relazione (in cui la funzione f è l’incognita del problema)
f 00 + f = 0
(2.13)
è detta equazione differenziale, dato che è un’equazione che coinvolge le derivate della funzione incognita f . L’equazione differenziale (2.13) è nota come equazione dell’oscillatore armonico, e compare in modo naturale quando si studiano fenomeni oscillatori o fenomeni ondosi, come le vibrazioni di una sbarra o le onde di superficie
dell’acqua. In particolare è facile verificare che tutte le funzioni della forma f (x) =
A cos x + B sin x con A, B ∈ R sono soluzioni dell’equazione (2.13).
2.5
∗
Derivate parziali
Molto spesso le funzioni con cui si tratta non dipendono da una sola variabile indipendente x, ma da più di una. Ad esempio, da quante variabili dipende xa ? Da una... e se
pensassimo anche a variabile? Allora sono due: x e a. In effetti, nella prima risposta
abbiamo immaginato a come un parametro fissato, nella seconda abbiamo accettato
una sua possibile variazione. In generale, una funzione di due variabili è un oggetto
del tipo f = f (x, y). Qui la variabile indipendente è la coppia (x, y) che apparterrà
ad un appropriato insieme (dominio di definizione). Se si tiene costante la variabile
y, cioè la si considera un parametro fissato, e si fa variare solo la variabile x, si ottiene
una funzione di una variabile. E’ possibile domandarsi se questa funzione sia o meno
derivabile.
Definizione 2.5.1 La funzione f è derivabile parzialmente rispetto ad x nel punto (x, y)
se esiste il limite
f (x + h, y) − f (x, y)
.
lim
h→0
h
Il valore del limite si indica con uno dei simboli seguenti
∂f
(x, y) = fx (x, y) = Dx f (x, y).
∂x
42
CAPITOLO 2. DERIVATE, DERIVATE E DERIVATE
Analogamente, f è derivabile parzialmente rispetto ad y nel punto (x, y) se esiste
∂f
f (x, y + k) − f (x, y)
(x, y) = fy (x, y) = Dy f (x, y) = lim
.
k→0
∂y
h
Per indicare le derivate parziali si usa il simbolo ∂ (“d storto”) per ricordare che ci
sono molte direzioni di derivabilità e che l’informazione che si ottiene con una singola
derivata è una informazione parziale. Questa è coerenza.
Se f è derivabile rispetto ad x e rispetto ad y, il vettore ∇f (x, y) = (fx (x, y), fy (x, y))
è detto gradiente di f (nel punto (x, y))5 .
Per il calcolo concreto delle derivate parziali, si possono usare le stesse regole di
derivazione di funzioni da R in R, basta ricordarsi di considerare costanti le variabili
rispetto a cui non si deriva. Ad esempio,
f (x, y) = x2 + y 2
f (x, y) = x3 y + y 2
=⇒
=⇒
fx (x, y) = 2x, fy (x, y) = 2y,
fx (x, y) = 3x2 y, fy (x, y) = x3 + 2y.
Analogamente al caso di funzioni da R in R, è possibile definire le derivate successive
di una funzione f . Una funzione di due variabili ammette (al più) due derivate prime
(cioè fx e fy ) e (al più) quattro derivate seconde:
fxx =
∂2f
,
∂x2
fxy =
∂2f
,
∂x∂y
fyx =
∂2f
,
∂y∂x
fyy =
∂2f
.
∂y 2
Ad esempio, consideriamo la funzione f (x, y) = x3 y + y 2 . Allora
fxx = 6x,
fxy = 3x2 ,
fyx = 3x2 ,
fyy = 2.
Guarda caso le derivate fxy e fyx coincidono... Questa proprietà è vera “quasi sempre”!
Chiaramente è possibile definire anche le derivate terze, quarte, . . . .
5
Il simbolo ∇ si legge “nabla”.
2.6. SCHEDA RIASSUNTIVA
2.6
43
Scheda riassuntiva
Definizione 2.1.1 (Derivabilità).
La funzione f è derivabile in x ∈ [a, b] se esiste finito il limite
f 0 (x) = xlim
→x
derivata (prima):
1
f (x1 ) − f (x)
.
x1 − x
Se f è derivabile in tutti i punti di I, f è derivabile in I.
df
dy
Notazioni equivalenti: f 0 =
= Df =
= ẏ = · · ·
dx
dx
Esempi:
La funzione
√
(c)0 = 0,
(x)0 = 1,
√
1
( x)0 = √
2 x
(x2 )0 = 2x,
x 6= 0.
x non è derivabile in x = 0.
Prime conseguenze della derivabilità
1. Derivabilità ⇒ Continuità.
2. Equazione della retta tangente: y = f (x0 ) + f 0 (x0 )(x − x0 ).
(
Due funzioni continue, non derivabili in 0:
f (x) = |x| e g(x) =
x sin
0
1
x
x 6= 0,
x=0
Prime formule di derivazione
(xα )0 = αxα−1
(sin x)0 = cos x
(cos x)0 = − sin x
(ex )0 = ex
(ln x)0 =
1
.
x
Regole fondamentali di derivazione
Linearità:
φ(x) = αf (x) + βg(x)
Prodotto:
φ(x) = f (x)g(x)
Rapporto:
φ(x) =
Funzione composta:
f (x)
g(x)
=⇒
=⇒
φ0 (x) = αf 0 (x) + βg 0 (x).
=⇒
φ0 (x) = f (x)g 0 (x) + f 0 (x)g(x).
φ0 (x) =
f (x) = h(g(x))
⇒
f 0 (x)g(x) − f (x)g 0 (x)
.
[g(x)]2
f 0 (x) = h0 (g(x)) g 0 (x).
Con questa formula si calcolano le derivate di xα (α ∈ R) e ax (a > 0), passando per la
(utilissima!) formula ab = eb ln a per ogni a > 0, b ∈ R.
La funzione inversa f −1 è derivabile in x se e solo se f 0 (f −1 (x)) 6= 0 e vale
44
CAPITOLO 2. DERIVATE, DERIVATE E DERIVATE
(f −1 )0 (x) =
Funzione inversa:
1
f 0 (f −1 (x))
.
Derivate di alcune funzioni inverse:
(ln x)0 =
1
,
x
(arcsin x)0 = √
(arctan x)0 =
1
,
1 − x2
1
,
1 + x2
(arccos x)0 = − √
(loga x)0 =
1
,
1 − x2
1
.
x ln a
Derivate successive
Definizione 2.4.1 (derivata seconda). Se f 0 è derivabile, f è derivabile due volte
Per la funzione f 00 , derivata seconda, si usano le notazioni
f 00 =
d2 f
d2 y
2
=
D
f
=
= ···,
dx2
dx2
Iterando il procedimento si può parlare di derivata n−esima.
Comunemente si scrive (k ∈ N)
C(I) ≡ C 0 (I) := {funzioni continue in I}
C 1 (I) := {funzioni derivabili in I e con f 0 ∈ C(I)}
C k (I) := {funzioni derivabili k volte in I e con f (k) ∈ C(I)}
C ∞ (I) := {funzioni infinitamente derivabili in I}.
Capitolo 3
Teoremi sulle derivate
3.1
Teorema di Lagrange
Dato che il rapporto incrementale è determinato dai valori della funzione in due punti
distinti, esso riflette proprietà della funzione “in grande”. Invece, la derivata, che si
ottiene con un procedimento di limite, riflette solo proprietà “in piccolo”. E’ molto utile
poter dedurre proprietà globali della funzione (cioè “in grande”) a partire da proprietà
locali (cioè “in piccolo”) date dalla derivata prima della funzione. Lo strumento più
utile per questa operazione è il teorema di Lagrange (o teorema del valor medio del calcolo
differenziale).1
Vediamo qual è il contenuto del Teorema di Lagrange dal punto di vista grafico.
Consideriamo il rapporto incrementale
∆f
f (x2 ) − f (x1 )
=
,
∆x
x2 − x1
e supponiamo che la funzione f sia derivabile in tutti i punti dell’intervallo chiuso
(x1 , x2 ). Sappiamo che il rapporto incrementale rappresenta il coefficiente angolare
della retta passante per i punti (x1 , f (x1 )) e (x2 , f (x2 )). Immaginiamo di traslare parallelamente questa secante, allora esisterà un posizione per cui la traslata è tangente al
grafico di f in un qualche punto di coordinate (ξ, f (ξ)), con ξ tra x1 e x2 . Per questo
(x1 )
valore intermedio ξ vale la relazione f 0 (ξ) = f (xx22)−f
.
−x1
Teorema 3.1.1 (Teorema di Lagrange).
Sia f continua in [x1 , x2 ] e derivabile in (x1 , x2 ).
Allora esiste ξ ∈ (x1 , x2 ) tale che
f 0 (ξ) =
f (x2 ) − f (x1 )
.
x2 − x1
1
Nei testi americani, spesso il Teorema di Lagrange è denominato “mean value theorem of differential
calculus” o “intermediate value theorem”.
45
46
CAPITOLO 3. TEOREMI SULLE DERIVATE
Figura 3.1: Il teorema di Lagrange
Un modo equivalente di enunciare la tesi del teorema è affermare che esiste θ ∈ (0, 1) per cui
f 0 (x1 + θ(x2 − x1 )) =
f (x2 ) − f (x1 )
.
x2 − x1
Le due formulazioni sono equivalenti dato che il punto intermedio ξ può sempre essere scritto
nella forma ξ = x1 + θ(x2 − x1 ) per θ ∈ (0, 1) opportuno. Oppure, sostituendo x1 con x e x2 con
x + h, possiamo scrivere
f (x + h) − f (x)
= f 0 (x + θh),
h
θ ∈ (0, 1).
Controesempio 1. “Datemi un punto (interno) di non derivabilità, e vi darò un controesempio.” Se la funzione f non è derivabile in tutti i punti dell’intervallo aperto (x1 , x2 ),
non è detto che valga la conclusione del Teorema di Lagrange: può capitare che nessuna parallela della secante che congiunge gli estremi del grafico sia tangente al grafico
stesso. Consideriamo la funzione f (x) = |x| nell’intervallo [−1, 1]. Questa funzione è
derivabile per ogni x 6= 0 e si ha
(
D(|x|) =
ma, dato che
−1
+1
−1 ≤ x < 0,
0 < x ≤ 1,
f (1) − f (−1)
1−1
=
= 0 6= D(|x|)
1 − (−1)
2
∀x,
la conclusione del Teorema non vale.
Si noti che, mentre è necessaria la derivabilità in tutti i punti interni all’intervallo [x1 , x2 ], cioè
in tutti i punti di (x1 , x2 ), non è necessaria la derivabilità agli estremi dell’intervallo. Ad esempio il
√
Teorema è applicabile alla funzione f (x) = x in [0, 1]. Verifichiamo direttamente la tesi:
√
√
1
1− 0
1
f (1) − f (0)
⇐⇒
ξ= .
= 1 = √ = f 0 (ξ)
=
1−0
4
1−0
2 ξ
Il Teorema di Lagrange è conseguenza del seguente risultato.
3.1. TEOREMA DI LAGRANGE
47
Teorema 3.1.2 (Teorema di Rolle).
Sia φ continua in [x1 , x2 ] e derivabile in (x1 , x2 ).
Se φ(x1 ) = φ(x2 ), allora esiste ξ ∈ (x1 , x2 ) tale che φ0 (ξ) = 0.
Geometricamente, il Teorema di Rolle afferma che, se φ(x1 ) e φ(x2 ) coincidono allora il grafico di φ ha tangente orizzontale in un punto interno dell’intervallo (x1 , x2 ).
Dimostrazione del Teorema di Rolle. Sia ` = φ(x1 ) = φ(x2 ). Dato che la funzione φ è continua
in [x1 , x2 ], per il Teorema di Weierstrass, esistono sia il massimo M che il minimo m di φ in
[x1 , x2 ]. Chiaramente, m ≤ ` ≤ M .
Se M = m, deve essere φ(x) = M in tutto l’intervallo [x1 , x2 ], quindi φ0 (x) = 0 in tutti i
punti dell’intervallo.
Se M 6= m, almeno uno dei due valori deve essere diverso da `. Supponiamo che sia
M 6= ` (l’altro caso si tratta in modo simile). Allora M > ` ed esiste ξ ∈ [x1 , x2 ] tale che
φ(ξ) = M . Inoltre visto che φ(x1 ) = φ(x2 ) = ` 6= M , ξ 6= x1 , x2 , ossia ξ ∈ (x1 , x2 ). Dato che
φ(x) ≤ M = φ(ξ) per ogni x ∈ [x1 , x2 ],
φ(x) − φ(ξ)
x−ξ
≤0
∀ x > ξ,
≥0
∀ x < ξ,
Passando al limite per x → ξ da destra e da sinistra e, sapendo che i limiti destro e sinistro
esistono e coincidono, si ha
φ(x) − φ(ξ)
φ(x) − φ(ξ)
φ0 (ξ) = lim
≤ 0 e φ0 (ξ) = lim
≥0
x−ξ
x−ξ
x→ξ +
x→ξ −
da cui 0 ≤ φ0 (ξ) ≤ 0, e quindi φ0 (ξ) = 0.
Dimostrazione del Teorema di Lagrange. Data f , definiamo la funzione (ausiliaria) φ
f (x2 ) − f (x1 )
(x − x1 ),
x2 − x1
che rappresenta la distanza verticale tra il punto (x, f (x)) del grafico della funzione e la retta
secante passante per i suoi estremi. La funzione φ soddisfa le ipotesi di regolarità del Teorema
di Rolle (cioè è continua in [x1 , x2 ] e derivabile in (x1 , x2 )). Inoltre
φ(x) := f (x) − f (x1 ) −
f (x2 ) − f (x1 )
(x1 − x1 ) = 0,
x2 − x1
f (x2 ) − f (x1 )
φ(x2 ) = f (x2 ) − f (x1 ) −
(x2 − x1 ) = 0.
x2 − x1
Quindi esiste un valore ξ ∈ (x1 , x2 ) tale che φ0 (ξ) = 0. Dato che
φ(x1 ) = f (x1 ) − f (x1 ) −
φ0 (x) = f 0 (x) −
f (x2 ) − f (x1 )
x2 − x1
si deduce che
φ0 (ξ) = f 0 (ξ) −
cioè la conclusione.
x ∈ (x1 , x2 ),
f (x2 ) − f (x1 )
= 0,
x2 − x1
48
CAPITOLO 3. TEOREMI SULLE DERIVATE
3.2
Conseguenze del Teorema di Lagrange
a. Funzioni monotòne
Sia f derivabile in (a, b). Allora
f 0 (x) > 0 ∀ x ∈ (a, b)
=⇒
(strettamente) crescente in (a, b).
f
Infatti, supponiamo f 0 (x) > 0 per ogni x ∈ (a, b) e siano x1 , x2 in (a, b) tali che x1 < x2 . Per il
Teorema di Lagrange, esiste ξ ∈ (x1 , x2 ) ⊂ (a, b) tale che
f (x2 ) − f (x1 ) = f 0 (ξ)(x2 − x1 ).
Dato che f 0 (ξ) > 0 per ipotesi, ne segue f (x2 ) > f (x1 ).
Analogamente si dimostra che
f 0 (x) < 0 ∀ x ∈ (a, b)
=⇒
(strettamente) decrescente in (a, b).
f
Se invece dell’informazione f 0 (x) > 0 o f 0 (x) < 0, si ha l’informazione più debole
f 0 (x) ≥ 0 o f 0 (x) ≤ 0, la conclusione va sostituita con le analoghe proprietà di monotonı́a deboli (nondecrescente/noncrescente).
Consideriamo, come esempio, la funzione
f (x) =
1
,
1 + x2
e studiamone la monotonı́a. Da quanto si è appena detto, basta studiare il segno della derivata prima di questa funzione. Inoltre, visto che f è una funzione razionale,
sappiamo calcolare esplicitamente l’espressione di f 0
1
1 + x2
Dato che
0
f (x)
0
=−
2x
,
(1 + x2 )2
<0
∀ x > 0,
∀ x < 0,
>0
la funzione è crescente in (−∞, 0] ed è decrescente [0, +∞). (Per disegnare un grafico della funzione f si può sfruttare anche che f (0) = 1, f ≥ 0 e che f è una funzione
pari).
1
x.
Vediamo un secondo esempio (potentemente istruttivo!). Consideriamo la funzione f (x) =
Dato che la derivata di questa funzione è
f 0 (x) = −
1
<0
x2
∀x 6= 0,
3.2. CONSEGUENZE DEL TEOREMA DI LAGRANGE
49
Figura 3.2: Grafico di 1/(1 + x2 ) e della sua derivata
concludiamo che la funzione f è decrescente... Se però calcoliamo la differenza del valore della
funzione in 1 e in −1, otteniamo una contraddizione: f (1) − f (−1) = 1 + 1 > 0. Cosa sta succedendo? Bisogna stare attenti al fatto che le conclusioni sulla monotonı̀a delle funzioni seguono
dal Teorema di Lagrange che vale su intervalli, cioè su insiemi “senza buchi” (si dicono insiemi
connessi). Se togliamo dall’enunciato del Teorema l’ipotesi di “assenza di buchi”, la conclusione non è più vera.2 Nel caso della funzione 1/x stiamo applicando il Teorema all’insieme
(−∞, 0) ∪ (0, +∞) che invece ha un buco: non contiene il punto 0. Ecco l’errore. Quindi la
funzione f (x) = 1/x NON è decrescente in R \ {0}! Possiamo invece correttamente applicare
i risultati sulla monotonı̀a alle semirette (−∞, 0) e (0, ∞) separatamente e concludere che x1 è
decrescente in (−∞, 0) ed è decrescente in (0, +∞).
b. Funzioni a derivata nulla.
Una seconda conseguenza del Teorema di Lagrange è la seguente:
f 0 (x) = 0 ∀ x ∈ (a, b)
=⇒
f
costante in (a, b).
Infatti, per ogni coppia di valori x1 , x2 ∈ (a, b), esiste un valore ξ, compreso tra i due, per cui
f (x2 ) − f (x1 ) = f 0 (ξ)(x2 − x1 ). Dato che f 0 (x) = 0 per ogni x ∈ (a, b), si avrà, in particolare,
f 0 (ξ) = 0, cioè
f (x2 ) − f (x1 ) = f 0 (ξ)(x2 − x1 ) = 0
=⇒
f (x2 ) = f (x1 ).
Si noti che, anche qui, ha un ruolo fondamentale il fatto che si lavori su intervalli. Ad
esempio, la funzione f definita da
(
f (x) =
2
0
1
x ∈ [0, 1],
x ∈ [2, 3],
Da cui il noto modo di dire, attribuito a N. Barbecue, “Non tutti i Teoremi riescono col buco”...
50
CAPITOLO 3. TEOREMI SULLE DERIVATE
è derivabile nel suo insieme di definizione [0, 1] ∪ [2, 3] e la sua derivata è ovunque
nulla, ma la funzione si guarda bene dall’essere costante.
In vari casi stiamo notando come la proprietà di connessione di un insieme sia una
proprietà importante. Non è questa la sede per approfondire di più la questione.
Sottolineiamo soltanto che la scelta di lavorare principalmente con funzioni definite in intervalli (o semirette) permette di trarre alcune conclusioni che non sarebbero valide nel caso di funzioni definite in insiemi qualsiasi. E’ compito del lettore
attento individuare dove sia possibile estendere i risultati a casi più generali, e
dove il lavorare su intervalli sia indispensabile.
c. Lipschitzianità di funzioni a derivata limitata
La derivabilità di una funzione ne implica la continuità. Vediamo ora un’altra proprietà
nella stessa linea di pensiero. Sia f derivabile in [a, b] e supponiamo inoltre che f 0 sia
limitata in [a, b], cioè supponiamo
∃ M > 0 tale che
|f 0 (x)| ≤ M
∀ x ∈ [a, b].
Per ogni coppia di valori x1 , x2 ∈ [a, b], dal Teorema di Lagrange segue che
|f (x2 ) − f (x1 )| = |f 0 (ξ)(x2 − x1 )| ≤ M |x2 − x1 |.
Quindi
una funzione derivabile con derivata limitata è lipschitziana.
Se f ∈ C 1 ([a, b]), la derivata prima, essendo continua in un intervallo chiuso e limitato,
è anche limitata per il Teorema di Weierstrass. Quindi tutte le funzioni in C 1 ([a, b])
sono lipschitziane.
d. Approssimazione lineare
Un’ulteriore applicazione interessante del Teorema di Lagrange è la stima dell’errore
che si commette approssimando una funzione con la sua tangente in un punto. Sia f
derivabile in [a, b]. Supponiamo di riuscire a calcolare esplicitamente il valore della funzione f e della sua derivata prima f 0 in un punto assegnato x0 ∈ [a, b]. Si può pensare
che il valore della funzione f in un qualsiasi altro punto sia dato approssimativamente
dal valore della funzione lineare che definisce la tangente al grafico di f in x0 , cioè
f (x) ≈ f (x0 ) + f 0 (x0 )(x − x0 ).
Questo corrisponde ad approssimare il grafico della funzione f con quello della sua
tangente. E’ chiaro da questa costruzione che l’errore commesso sarà tanto più piccolo
quanto più piccola è la distanza |x−x0 |. E’ possibile stimare l’errore che commettiamo facendo questa approssimazione? Consideriamo un esempio concreto. Vogliamo calcolare, in
3.2. CONSEGUENZE DEL TEOREMA DI LAGRANGE
51
modo approssimato, il valore di sin(1/10). Dato che 1/10 è ragionevolmente vicino a 0,
possiamo pensare di approssimare la funzione sin x con la sua tangente in x = 0, cioè
sin(x) ≈ x. Calcolando in x = 0, 1 otteniamo l’approssimazione richiesta
sin (0, 1) ≈ 0, 1.
Il problema fondamentale è: qual è l’ordine di grandezza dell’errore commesso? In
altri termini, è possibile stimare la grandezza della differenza | sin (0, 1) − 0, 1|?
Torniamo al caso generale. Supponiamo di lavorare con una funzione f che sia derivabile due volte nell’intervallo [a, b] e supponiamo che la derivata seconda f 00 sia limitata,
cioè esista M > 0 tale che |f 00 | ≤ M . Dato x0 ∈ [a, b], vogliamo stimare il valore assoluto
della quantità
Rx0 (x) = f (x) − f (x0 ) − f 0 (x0 )(x − x0 ).
Applicando il Teorema di Lagrange otteniamo l’espressione
Rx0 (x) = f 0 (ξ)(x − x0 ) − f 0 (x0 )(x − x0 ) = (f 0 (ξ) − f 0 (x0 ))(x − x0 ),
dove ξ è un punto compreso tra x e x0 . Applicando il Teorema di Lagrange all’incremento f 0 (ξ) − f 0 (x0 ) otteniamo
Rx0 (x) = f 00 (η)(ξ − x0 )(x − x0 ),
dove η è un punto compreso tra ξ e x0 . Quindi il valore assoluto dell’errore Rx0 (x) è
stimato da
|Rx0 (x)| = |f 00 (η)||ξ − x0 ||x − x0 | ≤ M |x − x0 |2 ,
(3.1)
dove si è usata la limitatezza della derivata seconda f 00 e il fatto che |ξ − x0 | ≤ |x − x0 |.
Nel caso-modello di f (x) = sin x, x0 = 0 e x = 1/10, si ha
1 R0
≤
10
1
,
100
dove si è usato che |f 00 (x)| = | − sin x| ≤ 1 e |x − x0 | = 1/10. Quindi
0.09 < sin(0.1) < 0.11
e. Derivabilità tramite il limite della derivata
In alcune situazioni, capita di lavorare con funzioni definite tramite formule diverse in diversi
intervalli. Consideriamo come caso modello una funzione della forma
f (x) =
f1 (x)
`
f (x)
2
x < x0 ,
x = x0 ,
x > x0 ,
dove ` ∈ R, e f1 , f2 sono funzioni note. La domanda naturale è se la funzione f sia derivabile
nel punto x0 oppure no. Come abbiamo già visto, la derivabilità implica la continuità, quindi,
prima di tutto, deve essere verificata la condizione
lim f1 (x) = ` = lim f2 (x).
x→x−
0
x→x+
0
52
CAPITOLO 3. TEOREMI SULLE DERIVATE
Se questa condizione non è verificata, la funzione non è continua in x0 e quindi, a maggior
ragione, non è neanche derivabile in x0 . Nel caso in cui la funzione sia continua in x0 , per
stabilirne la derivabilità occorre calcolare il limite del rapporto incrementale in x0 . Dato che la
funzione f è definita da espressioni diverse a seconda che ci si trovi a destra o a sinistra di x0 ,
è sensato calcolare il limite del rapporto incrementale da destra e da sinistra.3 Per definizione,
la funzione f è derivabile in x0 se e solo se questi limiti esistono e coincidono, ossia se e solo se
lim
x→x−
0
f2 (x) − `
f1 (x) − `
= lim
.
x − x0
x − x0
x→x+
0
La derivata in x0 è il valore comune di questi due limiti.
In molte situazioni le f1 e f2 sono funzioni derivabili in tutto il loro insieme di definizione
ed è possibile calcolare esplicitamente la funzione derivata. Invece di calcolare il limite del
rapporto incrementale, può essere più semplice calcolare le derivate f10 e f20 nei rispettivi domini
e calcolare il limite di queste funzioni derivate. Quale informazione dà questa procedura?
Proposizione 3.2.1 Dato x0 ∈ R e r > 0, sia f continua in x0 e derivabile in
(x0 − r, x0 + r) \ {x0 } e supponiamo che esistano finiti il limite destro e sinistro
lim f 0 (x) = `± . Allora f è derivabile in x0 se e solo se `+ = `− .
x→x±
0
Dimostrazione. Grazie al Teorema di Lagrange è possibile scrivere il rapporto incrementale
come
0
se x < x0 ,
(x < ξ− < x0 )
f (ξ− )
f (x) − f (x0 )
=
x − x0
f 0 (ξ )
se x > x0 ,
(x0 < ξ+ < x)
+
dove ξ± sono punti opportuni tra x e x0 . Passando al limite per x → x0 da sinistra, dato che il
limite sinistro della derivata f 0 esiste ed è uguale ad `− ,
lim
x→x−
0
f (x) − f (x0 )
= lim f 0 (ξ− ) = `− .
x − x0
x→x−
0
Analogamente per il limite destro. Quindi, nelle ipotesi della Proposizione 3.2.1, i limiti destro
e sinistro del rapporto incrementale esistono e sono uguali, rispettivamente, a `+ e `− . A questo
punto, la conclusione è evidente.
Ad esempio, studiamo la derivabilità in 0 della funzione f (x) = x|x|. Dato che
(
x|x| =
−x2
x2
x < 0,
x ≥ 0,
la funzione è certamente derivabile per x 6= 0 e
(
D (x|x|) =
3
−2x
2x
x < 0,
x > 0.
Se esiste il limite destro del rapporto incrementale di una funzione f in x0 , si dice che f è derivabile
da destra in x0 . Analogamente per il limite sinistro. Per indicare il limite destro/sinistro del rapporto
incrementale (qualora esistano), cioè per indicare la derivata destra/sinistra si usa il simbolo D± f (x0 ), o
varianti.
3.3. TEOREMA FONDAMENTALE DEL CALCOLO INTEGRALE
53
Ne segue che
lim −2x = lim 2x = 0,
x→0−
x→0+
la funzione è derivabile in 0.
Consideriamo, invece, la funzione e−|x| . In questo caso
(
−|x|
e
=
ex
e−x
x < 0,
x ≥ 0.
La funzione è derivabile per x 6= 0 e
−|x|
D e
In questo caso
(
=
ex
−e−x
x < 0,
x > 0.
lim ex = 1 6= −1 = lim −e−x ,
x→0−
x→0+
e quindi la funzione non è derivabile in 0.
E’ importante sottolineare che la verifica della derivabilità in x0 tramite il calcolo del limite
della derivata a destra e a sinistra di x0 è lecita solo quando la derivata ammetta limiti destro e
sinistro in x0 . Quando questi limiti non esistano, il criterio non è più valido. La funzione può
essere derivabile o può non esserlo.
Ad esempio, consideriamo la funzione
(
x2 sin
0
f (x) =
1
x
x 6= 0,
x = 0.
Per x 6= 0, la derivata prima f 0 di questa funzione è
1
f (x) = 2x sin
x
0
1
.
x
− cos
Per x → 0, il primo dei due termini è infinitesimo, mentre il secondo non ammette limite, quindi
non esiste lim f 0 (x). La Proposizione 3.2.1 non è applicabile. Per studiare la derivabilità in
x→0±
zero, calcoliamo direttamente il limite del rapporto incrementale
1
h2 sin(1/h) − 0
= lim h sin
h→0
h→0
h−0
h
lim
= 0.
Quindi la funzione è derivabile in 0 e f 0 (0) = 0.
3.3
Teorema fondamentale del calcolo integrale
Torniamo al problema di determinare formule di derivazione e consideriamo il caso
delle funzioni integrali. Sia f ∈ C([a, b]) (cioè una funzione continua in [a, b]). Fissato
α ∈ [a, b], definiamo la funzione φ come segue
φ(x) =
Z
x
α
f (t) dt
x ∈ [a, b].
54
CAPITOLO 3. TEOREMI SULLE DERIVATE
Abbiamo già visto che questa funzione è continua (è anche lipschitziana). Per studiarne la derivabilità, consideriamo il suo rapporto incrementale
x+h
x
Z
φ(x + h) − φ(x)
1 Z
1 Z x+h
=
f (t) dt − f (t) dt =
f (t) dt
h
h α
h
x
α
(l’ultima uguaglianza è conseguenza delle proprietà di additività dell’integrale). Dato
che la funzione f è continua, è possibile applicare il Teorema della Media Integrale per
riscrivere il rapporto incrementale come
φ(x + h) − φ(x)
= f (ξ)
h
(ξ
compreso tra x e x + h).
Passando al limite per h → 0 e notando che, dato che f è continua e ξ → x, lim f (ξ) =
h→0
f (x), si deduce
φ(x + h) − φ(x)
= lim f (ξ) = f (x).
h→0
h→0
h
Abbiamo quindi dimostrato il seguente risultato.
φ0 (x) = lim
Teorema 3.3.1 (Teorema Fondamentale del Calcolo Integrale – Prima parte).
Sia f ∈ C([a, b]), α ∈ [a, b]. e φ(x) =
φ0 (x) = f (x).
Zx
f (t) dt per x ∈ [a, b]. Allora φ è derivabile in [a, b] e
α
Questo risultato è estremamente interessante sotto molti punti di vista.
Una prima conseguenza (pratica) notevole è che, dato che siamo in grado di calcolarne la
derivata, possiamo dedurre molte proprietà qualitative importanti anche per una funzione che
non sia espressa direttamente tramite funzioni elementari, ma come integrale di una funzione
elementare. Ad esempio consideriamo la funzione
funzione degli errori:
1
Erf(x) = √
2π
Z
x
2 /2
e−t
dt,
0
(a meno di costanti moltiplicative). Chiaramente questa funzione è ben definita su tutto R (la
2
funzione e−x è continua in tutto R e quindi integrabile su ogni intervallo).
Dal Teorema Fondamentale del Calcolo (I parte), deduciamo che
1
2
D (Erf(x)) = √ e−x /2 > 0.
2π
Quindi le rette tangenti al grafico di questa funzione hanno sempre coefficiente angolare positivo. Tra non molto vedremo come questa informazione si traduca nel fatto che la Erf(x) è
crescente (e quindi invertibile).
Inoltre, il Teorema 3.3.1 risolve un problema interessante:
3.3. TEOREMA FONDAMENTALE DEL CALCOLO INTEGRALE
55
Figura 3.3: La funzione degli errori (sbagliata?)
data f , trovare una funzione F che risolva l’equazione F 0 = f .
L’equazione F 0 = f è un’equazione differenziale in cui il dato è la funzione f e l’incognita
è la funzione F . Una soluzione F di questa equazione si dice primitiva di f . Il Teorema
fondamentale del calcolo afferma che se f ∈ C([a, b]) il problema F 0 = f ammette
almeno una soluzione (data dalla funzione integrale φ), cioè esiste sempre almeno una
primitiva. Da questo punto di vista si può intepretare l’operazione di integrazione come
l’operazione inversa della derivazione.
Teorema 3.3.2 (Teorema Fondamentale del Calcolo Integrale – Seconda parte).
Sia f definita in [a, b] e siano F e G due sue primitive. Allora esiste c ∈ R tale che
F (x) − G(x) = c
per ogni
x ∈ [a, b].
Dimostrazione del Teorema Fondamentale (II parte). La dimostrazione è molto semplice.
Calcoliamo la derivata della funzione differenza F − G:
(F (x) − G(x))0 = F 0 (x) − G0 (x) = f (x) − f (x) = 0.
Per quanto già visto (Sezione 3.2(b)), la differenza F − G deve essere costante.
Quindi, se
f ∈ C([a, b]), l’equazione F 0 = f è completamente risolta: tutte le soluzioni sono della
forma
Z x
f (t) dt + c
c ∈ R.
α
La classe delle primitive della funzione f si indica con
Z
f (x) dx,
56
CAPITOLO 3. TEOREMI SULLE DERIVATE
e si chiama integrale indefinito di f . Si noti bene che l’integrale indefinito di una
funzione indica una classe di funzioni, e non una singola funzione.
Sintetizziamo i due risultati enunciati in un’unico Teorema.
Teorema 3.3.3 (Teorema Fondamentale del Calcolo Integrale).
Data f ∈ C([a, b]), le soluzioni dell’equazione differenziale F 0 = f sono tutte e
sole della forma
F (x) =
Z x
α
α ∈ [a, b] e
con
f (t) dt + c,
c ∈ R.
Se si cerca una primitiva F di una funzione f con la richiesta aggiuntiva che la
funzione F valga in un punto assegnato x0 un valore dato y0 , cioè se si vuole risolvere
(
dati f ∈ C([a, b]), x0 ∈ [a, b], y0 ∈ R, trovare F tale che
F 0 (x) = f (x),
F (x0 ) = y0 ,
(3.2)
la soluzione F esiste, è unica ed è data da
F (x) = y0 +
Z
x
f (t) dt.
x0
Il problema (3.2) rientra nella classe dei problemi di Cauchy per equazioni differenziali.
Primitive e calcolo degli integrali definiti.
Il Teorema fondamentale del calcolo ha una conseguenza interessante che riguarda il
calcolo esplicito di integrali definiti. Fino ad adesso, data una funzione f continua
abbiamo visto che ha senso parlare del suo integrale definito nell’intervallo [a, b]
Z
b
f (t) dt.
a
(3.3)
Abbiamo anche calcolato il valore di questo integrale definito per scelte particolari
della funzione f . Il calcolo era basato sulla costruzione dell’integrale tramite somme
approssimanti e sul fatto che queste somme approssimanti, grazie ad alcune proprietà
delle funzioni che abbiamo considerato, possono essere riscritte in una forma che permette di passare al limite ed ottenere il valore esplicito dell’integrale. Concretamente
questa strategia di calcolo non è affatto conveniente.
Supponiamo ora di voler calcolare (3.3) e supponiamo di conoscere già (per altre
vie) una primitiva della funzione f , cioè una funzione F tale che F 0 = f . Sappiamo
che anche la funzione integrale definita da
φ(x) =
Z
x
a
f (t) dt.
3.3. TEOREMA FONDAMENTALE DEL CALCOLO INTEGRALE
57
è una primitiva di f e, quindi, per il Teorema Fondamentale del Calcolo (II parte),
differisce da F per una costante, cioè φ(x) = F (x) + c per qualche c ∈ R. La costante c
può essere determinata, calcolando in x = a:
0 = φ(a) = F (a) + c
c = −F (a).
=⇒
Si deduce quindi che φ(x) = F (x) − F (a) e quindi
Z
b
f (t) dt = φ(b) = F (b) − F (a).
a
Quindi, se si conosce una primitiva F della funzione f , l’integrale definito di f in [a, b] è
uguale alla differenza dei valori della primitiva in b e in a, cioè
F0 = f
=⇒
Z
b
f (t) dt = F (b) − F (a).
a
b
h
ib
La differenza F (b) − F (a) si indica anche con F (x) , o F (x) .
a
a
Ad esempio, abbiamo visto che
b
1
x2 dx = (b3 − a3 ).
3
a
Per dimostrare questa formula, siamo passati per una rappresentazione (non banale)
della somma dei quadrati dei primi n numeri interi. Grazie a quanto abbiamo appena
notato, per calcolare lo stesso oggetto, basta determinare una primitiva della funzione
x2 . Dato che D(x3 ) = 3x2 ,
1 3
x = x2 ,
D
3
quindi una primitiva di x2 è x3 /3. Otteniamo perciò
Z
b
Z
x2 dx =
a
1 3 b
1
1
1
x = b3 − a3 = (b3 − a3 ).
a
3
3
3
3
Più in generale, dato che
D
vale la formula
b
1
xn+1 = xn ,
n+1
b
1
1
xn+1 =
(bn+1 − an+1 ).
a
n+1
n+1
a
Nello stesso modo possiamo ottenere formule di integrazione per altre funzioni. Ad
esempio,
Z
xn dx =
Z
b
a
b
sin x dx = − cos x = cos a − cos b.
a
Attenzione! L’integrazione esplicita tramite una primitiva nota è una scorciatoia
notevole rispetto al calcolo del limite delle somme approssimanti, ma è una “fortuna occasionale”. Esistono tante funzioni per cui non è possibile determinare una
primitiva in forma elementare. Non bisogna perciò mai confondere la definizione
di integrale definito (che ha senso per ogni funzione continua) e il calcolo tramite
una primitiva nota (che si può realizzare solo in alcuni casi).
58
3.4
CAPITOLO 3. TEOREMI SULLE DERIVATE
Scheda riassuntiva
Teorema di Lagrange
Teorema 3.1.1 (Teorema di Lagrange).
Sia f continua in [x1 , x2 ] e derivabile in (x1 , x2 ). Allora esiste ξ ∈ (x1 , x2 ) tale che
f 0 (ξ) =
f (x2 ) − f (x1 )
.
x2 − x1
Graficamente, esiste un posizione per cui la traslata della retta per i punti (x1 , f (x1 )) e
(x2 , f (x2 )) è tangente al grafico di f in (ξ, f (ξ)).
Controes. 1. La funzione f (x) = |x| in [−1, 1] è derivabile per x 6= 0 e
f (1) − f (−1)
6= D(|x|)
1 − (−1)
Teorema 3.1.2 (Teorema di Rolle).
Sia φ continua in [x1 , x2 ] e derivabile in (x1 , x2 ). Se φ(x1 ) = φ(x2 ), allora esiste ξ ∈ (x1 , x2 )
tale che φ0 (ξ) = 0.
Geometricamente, il Teorema di Rolle afferma che il grafico di φ ha tangente orizzontale in un punto interno dell’intervallo (x1 , x2 ).
Conseguenze del Teorema di Lagrange
a. Funzioni monotòne
f 0 (x) > 0 ∀ x ∈ (a, b)
f 0 (x) < 0 ∀ x ∈ (a, b)
=⇒
=⇒
f
crescente in (a, b).
decrescente in (a, b).
f
Analogamente
f 0 (x) ≥ 0 ∀ x ∈ (a, b)
f 0 (x) ≤ 0 ∀ x ∈ (a, b)
=⇒
=⇒
debolmente crescente in (a, b).
f
f
debolmente decrescente in (a, b).
b. Funzioni a derivata nulla.
f 0 (x) = 0 ∀ x ∈ (a, b)
=⇒
f
costante in (a, b).
c. Lipschitzianità di funzioni a derivata limitata
Una funzione derivabile con derivata limitata è lipschitziana.
In particolare, le funzioni in C 1 ([a, b]) sono lipschitziane.
d. Approssimazione lineare
3.4. SCHEDA RIASSUNTIVA
59
Se esiste M > 0 tale che |f 00 | ≤ M in [a, b], allora
|Rx0 (x)| = |f 00 (η)||ξ − x0 ||x − x0 | ≤ M |x − x0 |2 ,
dove Rx0 (x) = f (x) − f (x0 ) − f 0 (x0 )(x − x0 ).
e. Derivabilità tramite il limite della derivata
Proposizione 3.2.1.
Dato x0 ∈ R e r > 0, sia f continua in x0 e derivabile in
(x0 − r, x0 + r) \ {x0 } e supponiamo che esistano finiti il limite destro e sinistro
lim f 0 (x) = `± . Allora f è derivabile in x0 se e solo se `+ = `− .
x→x±
0
Se il limite della derivata a destra e a sinistra di x0 non esistono, il criterio non è applicabile:
la funzione può essere derivabile o può non esserlo.
Teorema fondamentale del calcolo integrale
Teorema 3.3.1 (Teorema Fondamentale del Calcolo Integrale – Prima parte).
Sia f ∈ C([a, b]), α ∈ [a, b] e φ(x) =
Zx
f (t) dt per x ∈ [a, b]. Allora φ è derivabile in [a, b] e
α
φ0 (x) = f (x).
Teorema 3.3.2 (Teorema Fondamentale del Calcolo Integrale – Seconda parte).
Sia f definita in [a, b] e siano F e G due sue primitive. Allora esiste c ∈ R tale che F (x) −
G(x) = c per ogni x ∈ [a, b].
Problema: data f , trovare una funzione F che risolva l’equazione F 0 = f .
Una funzione F tale che F 0 = f è una primitiva di f . Le primitive di f si indicano con
Z
f (x) dx
integrale indefinito di f
Teorema 3.3.3 (Teorema Fondamentale del Calcolo Integrale).
Data f ∈ C([a, b]), le soluzioni dell’equazione differenziale F 0 = f sono tutte e sole della forma
F (x) =
Z
x
con α ∈ [a, b] e c ∈ R.
f (t) dt + c
α
Primitive e calcolo degli integrali definiti. Se si conosce una primitiva F della funzione f , l’integrale definito di f in [a, b] è uguale alla differenza dei valori della primitiva in b e in a:
Z b
0
F =f
=⇒
f (t) dt = F (b) − F (a).
a
60
CAPITOLO 3. TEOREMI SULLE DERIVATE
Capitolo 4
Analisi locale
Grazie ai concetti di limite e di derivazione è possibile analizzare con relativa precisione una classe ampia di funzioni, in modo da determinarne proprietà qualitative
importanti. In genere si distinguono le proprietà locali da quelle globali. Una proprietà
di una funzione f è locale se dipende dal comportamento della funzione nell’intorno
di un punto x. Continuità e derivabilità in x sono proprietà locali. Una proprietà di
una funzione f è globale se vale in tutto l’insieme di definizione della f . Ad esempio le
funzioni ex , arctan x, x3 , . . . sono funzioni globalmente monotòne crescenti e pertanto
(globalmente) invertibili. L’obiettivo di questo capitolo è di approfondire l’uso della
derivazione per determinare proprietà locali di funzioni. Torneremo più avanti sulle
proprietà globali.
4.1
Punti stazionari
Data f : I → R, un punto x0 ∈ I è punto di massimo di f se vale
f (x) ≤ f (x0 )
∀ x ∈ I.
Il valore f (x0 ) = max f (x) è il massimo della funzione f in I. Analogamente per i
x∈I
minimi.
L’esistenza di un valore massimo o di un valore minimo per una funzione è una
proprietà globale della funzione. E’ utile introdurre un analogo locale del concetto di
massimo e di minimo.
Definizione 4.1.1 (Massimo e minimo relativo)
Il punto x0 ∈ I è un punto di massimo relativo e il valore f (x0 ) è un massimo relativo di
f se esiste un intorno del punto x0 tale che tutti i valori della funzione in quell’intorno sono
minori o uguali a f (x0 ), cioè
∃δ > 0
tale che
f (x) ≤ f (x0 )
Analogamente per il minimo relativo.
61
∀x ∈ I,
|x − x0 | < δ.
62
CAPITOLO 4. ANALISI LOCALE
Un punto x0 che sia o di massimo relativo o di minimo relativo è un punto di estremo
relativo.
Se un punto x0 è un punto isolato dell’insieme di definizione di f , allora è sempre
un punto di massimo e di minimo relativo! Colpo di scena!
Se una funzione ha un massimo o un minimo relativo in corrispondenza di un punto x0 in cui la funzione è derivabile e tale punto è interno all’insieme di definizione,
necessariamente deve essere
f 0 (x0 ) = 0.
Dimostrazione. La dimostrazione è ovvia pensando alla necessaria posizione orizzontale della
retta tangente. Per una dimostrazione analitica, sia x0 un punto di massimo relativo interno e
supponiamo f derivabile in x0 . Dato che f (x) ≤ f (x0 ) per ogni x ∈ (x0 − δ, x0 + δ) ⊂ I
f (x) − f (x0 )
x − x0
≤0
∀ x0 < x < x0 + δ,
≥0
∀ x0 − δ < x < x0 ,
Passando al limite per x → x0 si deduce f 0 (x0 ) = 0 (si ragiona come per la dimostrazione del
Teorema 3.1.2).
Nel caso in cui il punto non sia interno al dominio, non vale la conclusione. Ad
esempio, se f : [a, b] → R è derivabile in a e a è un punto di massimo relativo, si
deduce solamente che f 0 (a) ≤ 0. Conclusioni analoghe si possono trarre per l’estremo
destro e per i punti di minimo.
Risolvere l’equazione f 0 (x) = 0 permette di determinare i possibili candidati a punti
di minimo o massimo relativo interno in cui f è derivabile (chiaramente, è possibile che
un estremo relativo cada in un punto in cui la funzione non è derivabile).
Definizione 4.1.2 (Punto stazionario).
Se f 0 (x) = 0, allora si dice che x è un punto stazionario1 o critico della funzione f .
Equivalentemente, si possono immaginare i punti critici di f come i valori x per cui
la tangente al grafico di f in (x, f (x)) è orizzontale.
Esercizio. Determinare i punti critici della funzione f (x) = x7 + 14x4 + 1.
Soluzione. La derivata di f è f 0 (x) = 7x3 (x3 + 8), quindi
f 0 (x) = 0
⇐⇒
x3 = 0 o x3 + 8 = 0
⇐⇒
x ∈ {0, −2}.
La funzione f ha due punti stazionari: x = 0 e x = −2.
1
Il termine stazionario è ereditato dalla cinematica. In quel contesto la funzione f gioca il ruolo della
posizione di una particella al tempo x e f 0 (x) è la sua velocità. Un punto in cui la derivata è nulla
corrisponde ad un istante di arresto.
4.1. PUNTI STAZIONARI
63
Classificazione dei punti stazionari
Si è detto che se x0 è un punto di massimo o di minimo relativo interno, necessariamente f 0 (x0 ) = 0. Il viceversa non è vero: esistono punti x0 tali che f 0 (x0 ) = 0, ma che
non sono né punti di massimo relativo, né punti di minimo relativo. Ad esempio, la
funzione f (x) = x3 è strettamente crescente (quindi non ha né punti di massimo né
punti di minimo in R), ma f 0 (x) = 3x2 si azzera nel punto x = 0.
Un modo per individuare quando un punto stazionario sia anche punto di massimo
o di minimo è tramite il segno della derivata prima alla destra e alla sinistra del punto
in questione. Supponiamo f derivabile in (x0 − δ, x0 + δ) con δ > 0. Allora
f 0 (x)
≥0
x 0 − δ < x < x0 ,
≤0
x0 < x < x0 + δ,
=⇒
x0
punto di massimo relativo.
=⇒
x0
punto di minimo relativo.
Analogamente, per il minimo, vale
0
f (x)
≤0
x 0 − δ < x < x0 ,
≥0
x0 < x < x0 + δ,
Queste affermazioni seguono dal legame tra monotonia e segno di f 0
f 0 (x) ≥ 0 ∀ x ∈ (a, b)
f 0 (x) ≤ 0 ∀ x ∈ (a, b)
=⇒
=⇒
f
f
debolmente crescente in (a, b),
debolmente decrescente in (a, b),
che abbiamo già visto come conseguenze del Teorema di Lagrange.
Esercizio. Determinare i punti critici della funzione f (x) = x2 (3x2 − 8x + 6) e dire
quali di essi sono punti di massimo o di minimo.
Soluzione. La derivata prima della funzione è
f 0 (x) = 2x(3x2 − 8x + 6) + x2 (6x − 8) = 12x(x2 − 2x + 1) = 12x(x − 1)2 .
I punti critici sono x = 0 e x = 1; il punto x = 0 è punto di minimo, mentre il punto
x = 1 non è né di massimo né di minimo.
Sia x0 un punto critico di f . Per riconoscere se f 0 cambia segno traversando x0 ,
basta considerare il segno di f 00 , qualora esista. Quindi
f 0 (x0 ) = 0,
f 00 (x0 ) > 0
=⇒
x0
punto di minimo relativo;
f 0 (x0 ) = 0,
f 00 (x0 ) < 0
=⇒
x0
punto di massimo relativo.
Nota bene! Si tratta solo di condizioni sufficienti: ad esempio, la funzione f (x) = x4
ha un punto di minimo in 0, ma f 00 (0) = 0.
64
∗
CAPITOLO 4. ANALISI LOCALE
Alcuni esempi raffinati
In genere, si immagina il grafico di una funzione vicino al punto di minimo come se valgano
le ipotesi scritte in precedenza, cioè con f 0 (x) ≤ 0 per x0 − δ < x < x0 e f 0 (x) ≥ 0 per
x0 < x < x0 + δ. Esistono però anche situazioni in cui una funzione alla sinistra del punto di
minimo non è decrescente e alla destra non è crescente. Scetticismo? Ecco un esempio:
x2 2 − sin 1
f (x) =
x
x 6= 0,
0
x = 0.
Figura 4.1: Il grafico della funzione f
La funzione f è derivabile in tutto R e
f (x) ≥ 0
∀ x ∈ R,
f (x) = 0
⇐⇒
x = 0.
Quindi il punto x = 0 è punto di minimo assoluto, e quindi di minimo relativo. Necessariamente f 0 (0) = 0 (come si può ottenere anche tramite il calcolo del limite del rapporto
incrementale). La derivata prima di f nei punti x 6= 0 è
f 0 (x) = 2x 2 − sin
quindi, per x ≈ 0, si ha f 0 (x) ≈ cos
1
x
1
x
1
,
x
+ cos
, che assume valori sia positivi che negativi.
L’esempio appena presentato proviene da una variante della funzione sin(1/x). La proprietà fondamentale di questa funzione (e della sua “discendenza”) è di avere un numero infinito di oscillazioni che si accumulano vicino al punto x = 0. Tipicamente, questa eventualità
sfugge alla prima intuizione. E’ proprio questo fatto che fa della funzione sin(1/x) un esempio
fondamentale.
Cogliamo l’occasione per far notare un’altra sottigliezza. Sappiamo che se g 0 (x) > 0 in un
intervallo, necessariamente la funzione g è crescente. Cosa succede se g 0 (x0 ) > 0 nel solo punto
x0 ? La possibilità di tracciare la retta tangente (che è crescente) suggerirebbe il fatto che la
funzione g sia crescente, per lo meno in un intorno di x0 . Invece questa affermazione è falsa!
Consideriamo la funzione g(x) = 12 x + f (x), essendo f (x) la precedente funzione, cioè
(
g(x) =
1
2x
0
+ x2 2 − sin
1
x
x 6= 0,
x = 0,
4.2. PUNTI DI SINGOLARITÀ
65
Anche questa funzione è derivabile dappertutto e si ha
(
0
g (x) =
Quindi g 0 (0) =
1
2
1
2
1
2
+ cos
1
x
+ 2x 2 − sin
1
x
x 6= 0,
x = 0,
> 0, ma in ogni intorno di x = 0 cadono punti in cui la derivata è negativa: si
tratta dei punti in cui cos x1 è uguale a −1. Quindi non è vero che la funzione g è crescente in un
intorno dell’origine.
Si noti che se g 0 fosse stata continua, g 0 (x0 ) > 0 avrebbe implicato g 0 (x) > 0 in un intorno di
x0 e quindi la monotonia in tale intorno.
4.2
Punti di singolarità
In generale il termine “singolarità” è usato in modo vago e con significati diversi. Qui,
per punti di singolarità ci riferiamo ad una di queste situazioni:
(a) valori x che non sono nell’insieme di definizione di f , ma che sono sul
bordo (ad esempio, se f : (a, b] → R, il punto a);
(b) punti dell’insieme di definizione in cui f non è continua;
(c) punti in cui f è continua, ma non derivabile.
Nel seguito, indichiamo sempre con x0 il punto di singolarità.
Asintoti verticali. Sia nel caso (a) che nel caso (b), si calcola il limite
lim f (x).
x→x0
Nel caso in cui il limite sia +∞ o −∞, la funzione ha in x = x0 un
asintoto verticale. Lo stesso è vero nel caso in cui sia il limite destro che il limite sinistro tendano a +∞ o −∞, ma con segni opposti. In generale, zeri del denominatore
di una funzione razionale (che non siano anche zeri del numeratore), corrispondono a
punti di asintoto verticale.
Le situazioni in cui il limite non esista o non esista finito o esistano i limiti destro e
sinistro, ma con valori diversi, danno luogo a discontinuità evidenti.
Punti angolosi e cuspidi. Consideriamo il caso (c), quindi supponiamo x0 tale che la
funzione f sia continua in x0 , ma non derivabile. Se esistono finiti i limiti destro e
sinistro della derivata prima
lim± f 0 (x) = `± ,
x→x0
66
CAPITOLO 4. ANALISI LOCALE
dato che f non è derivabile in x0 , deve essere `+ 6= `− . Un punto di questo genere si
chiama punto angoloso (o spigolo). Per disegnarlo correttamente è possibile tracciare
le rette tangenti destra e sinistra, cioè le rette di equazione
y = f (x0 ) + `± (x − x0 ).
Nel caso in cui i limiti destro e sinistro siano ±∞ si possono avere due situazioni
differenti. Se entrambi sono +∞ (o −∞), cioè se
lim f 0 (x) = +∞
x→x±
0
(−∞),
il punto x0 è un punto a tangente verticale. Se invece i limiti destro e sinistro sono ±∞,
ma con segni opposti, il punto x0 è una√cuspide del grafico di f . Per un esempio di
3
cuspide, si consideri la funzione f (x) = x2 . In questo caso
2
lim± f 0 (x) = lim± √
= ±∞.
x→0
x→0 3 3 x
Ovviamente sono possibili comportamenti analoghi a quelli descritti, ma misti: ad
esempio, è possibile che una funzione abbia la derivata prima che tende ad un valore
dato da destra e che diverge da sinistra, o tutte le varianti che la mente è in grado di
inventare. Fate voi.
Un altro esempio. Consideriamo a mo’ d’esempio, la funzione
1
x
f (x) = arctan
x 6= 0.
Il punto x = 0 è un punto di singolarità del grafico in cui la funzione non è definita. E’
Figura 4.2: Il grafico di arctan
1
x
immediato verificare che
π
1
=−
x
2
lim− arctan
x→0
1
π
=
x
2
e
lim+ arctan
x→0
4.3. COMPORTAMENTO ASINTOTICO
67
Inoltre
1
→ −1 per x → 0± .
2
1+x
Quindi la funzione f ha una tangente destra ed una tangente sinistra (diverse) in x = 0
e, vicino a 0, si comporta come la funzione g
f 0 (x) = −
(
g(x) =
− π2 − x
π
−x
2
x < 0,
x > 0.
4.3 Comportamento asintotico
Se la funzione f è definita in insiemi illimitati, è interessante studiarne il comportamento per x → ∞. Con un abuso di notazione, si può parlare di studio della funzione
nell’intorno di +∞ (o di −∞).
Sia f una funzione definita su una semiretta f : [a, +∞) → R con a ∈ R. In questo
caso si vuole stabilire cosa succeda per x → +∞, cioè determinare il comportamento
asintotico per x → +∞. Considerazioni analoghe valgono per il caso di semirette del
tipo (−∞, a], per R, e per tutte le varianti di domini illimitati che l’immaginazione (e
la realtà matematica) è in grado di produrre.
Sia f : [a, +∞) → R. La prima operazione sensata è il calcolo del limite per x →
+∞. Se tale limite esiste finito, cioè se
∃ lim f (x) = ` ∈ R,
x→+∞
si dice che la funzione f tende asintoticamente ad `, oppure che f ha un asintoto
orizzontale (di equazione y = `) per x → +∞. Per disegnare più correttamente il
grafico può essere interessante studiare il segno della funzione f (x) − `, che indica se
il grafico della funzione f sia al di sopra o al di sotto dell’asintoto.
Ad esempio, consideriamo la funzione
f (x) =
2x2
x2 + 1
x ∈ [1, +∞).
In questo caso,
2x2
= 2,
x→+∞ x2 + 1
lim
quindi la funzione ha l’asintoto orizzontale di equazione y = 2. Studiamo il segno della
funzione f (x) − `
2x2
2
f (x) − ` = 2
−2=− 2
< 0,
x +1
x +1
quindi la funzione f tende a y = 2 dal basso.
Invece, la funzione
2x2 sin x
f (x) = 2
x +1
x ∈ [1, +∞),
68
CAPITOLO 4. ANALISI LOCALE
Figura 4.3: Il grafico di f (x) =
2x2
x2 +1
non ha limite per x → +∞ e quindi non ha asintoto orizzontale.
Nel caso in cui il limite della funzione f esista, ma sia ±∞ è possibile che la funzione
tenda asintoticamente ad un asintoto obliquo, ossia è possibile che esistano a, b ∈ R tali
che
lim [f (x) − (ax + b)] = 0.
(4.1)
x→+∞
Questa proprietà indica che il grafico della funzione f si avvicina al grafico della retta
y = ax + b per x → +∞. Il problema è: come determinare (qualora esistano) le costanti a e
b? Supponiamo che valga (4.1), allora
f (x)
f (x) − ax
= lim
+ a = a.
x→+∞ x
x→+∞
x
lim
Una volta noto a, è possibile determinare b (qualora esista) calcolando
lim [f (x) − ax] = b.
x→+∞
Quindi, per determinare la presenza di un asintoto obliquo
(i) calcolare lim f (x): se il limite esiste finito, c’è un asintoto orizzontale
x→+∞
(fine dello studio a +∞), se il limite non esiste, non c’è né asintoto obliquo,
né asintoto orizzontale (fine dello studio a +∞), se il limite è +∞ o −∞ si
va al punto (ii);
(ii) calcolare lim f (x)/x: se il limite esiste finito, il suo valore è a e si va
x→+∞
al punto (iii), se il limite non esiste o se vale ±∞, non c’è asintoto obliquo
(fine dello studio a +∞);
(iii) calcolare lim [f (x) − ax]: se il limite esiste finito, il suo valore è b, la
x→+∞
funzione ha asintoto obliquo di equazione y = ax + b, se il limite non esiste
o se vale ±∞, non c’è asintoto obliquo (fine dello sudio a +∞).
4.3. COMPORTAMENTO ASINTOTICO
69
Consideriamo ad esempio la funzione
f (x) =
3x2 − 1
x+1
x ∈ [0, +∞).
Si ha
3x2 − 1
= +∞,
x→+∞
x→+∞ x + 1
3x2 − 1
f (x)
= lim
= 3 =: a,
lim
x→+∞ x(x + 1)
x→+∞ x
3x2 − 1
−1 − 3x
− 3x = lim
= −3 =: b.
lim f (x) − 3x = lim
x→+∞ x + 1
x→+∞
x→+∞ x + 1
lim f (x) = lim
Quindi la funzione ha un asintoto obliquo di equazione y = 3x − 3. Anche in questo caso, per
disegnare un grafico più preciso, si può studiare il segno della funzione
f (x) − (ax + b) =
3x2 − 1
2
− (3x − 3) =
>0
x+1
x+1
∀ x > −1.
Visto che la differenza è positiva il grafico della funzione tende a quello dell’asintoto dall’alto.
Figura 4.4: Il grafico di f (x) =
3x2 −1
x+1
Dopo il punto (i), se esiste finito lim f 0 (x), allora a è uguale al valore di questo
x→+∞
limite e si può proseguire direttamente dal punto (iii). Se invece il limite di f 0 non
esiste, bisogna necessariamente seguire il procedimento esposto sopra. Ad esempio,
sin(x2 )
per f (x) = x +
, si ha
x
f 0 (x) = 1 + 2 cos(x2 ) −
sin(x2 )
,
x2
che non ammette limite per x → +∞, ma è facile vedere che la funzione ha un asintoto
obliquo per x → +∞ di equazione y = x.
70
CAPITOLO 4. ANALISI LOCALE
Altri profili asintotici
In alcune situazioni particolari, può capitare che una data funzione f tenda asintoticamente ad
una funzione nota, che non sia un polinomio di primo grado. Consideriamo, ad esempio,
f (x) =
x3 + 1
.
x−2
Grazie all’algoritmo di divisione di polinomi, possiamo riscrivere questa funzione come
f (x) = x2 + 2x + 4 +
9
.
x−2
Da questa espressione è immediato vedere che
lim (f (x) − (x2 + 2x + 4)) = 0,
x→±∞
e quindi il grafico di f tende asintoticamente alla parabola y = x2 + 2x + 4.
Riconsideriamo la funzione
f (x) =
2x2 sin x
x2 + 1
x ∈ [1, +∞).
2
Dato che x2x
2 +1 → 2 per x → +∞, è sensato immaginare che questa funzione “assomigli” alla
funzione f (x) = 2 sin x per x → +∞. Calcoliamo la differenza tra f (x) e 2 sin x e vediamo se è
infinitesima:
2x2 sin x
2 | sin x|
2
− 2 sin x =
≤
→0
2
2
x +1
1+x
1 + x2
per x → +∞.
Quindi
2x2 sin x
= 2 sin x + h(x)
con
lim h(x) = 0.
x→+∞
x2 + 1
In generale se siamo in grado di riscrivere la funzione f nella forma
f (x) =
f (x) = g(x) + h(x)
con g funzione di cui si conosce il grafico e h → 0 per x → ∞, il grafico della funzione f
tende verso quello della funzione g. Non esiste alcuna strategia generale per determinare una
decomposizione di questo genere.
4.4. SCHEDA RIASSUNTIVA
4.4
71
Scheda riassuntiva
Punti stazionari
Data f : I → R, un punto x0 ∈ I è punto di massimo di f se f (x) ≤ f (x0 ) per ogni
x ∈ I. Il valore f (x0 ) = max f (x) è il massimo della funzione f in I. Analogamente per
x∈I
i minimi.
Definizione 4.1.1 (Massimo e minimo relativo).
Il punto x0 ∈ I è un punto di massimo relativo se esiste δ > 0 tale che f (x) ≤ f (x0 ) per
ogni x ∈ I con |x − x0 | < δ. Il valore f (x0 ) è un massimo relativo di f . Analogamente per il
minimo relativo. Un punto x0 di massimo o minimo relativo è un punto di estremo relativo.
Se una funzione ha un massimo o un minimo relativo in x0 in cui la funzione è
derivabile e tale punto è interno all’insieme di definizione, allora f 0 (x0 ) = 0.
Definizione 4.1.2 (Punto stazionario).
Se f 0 (x) = 0, allora si dice che x è un punto stazionario o critico della funzione f .
Classificazione dei punti stazionari
Per individuare quando un punto x0 stazionario sia anche punto di massimo o di
minimo (per f derivabile in (x0 − δ, x0 + δ) con δ > 0)
0
f (x)
≥0
x 0 − δ < x < x0 ,
≤0
x0 < x < x0 + δ,
0
f (x)
≤0
x 0 − δ < x < x0 ,
≥0
x0 < x < x0 + δ,
=⇒
x0
punto di massimo relativo.
=⇒
x0
punto di minimo relativo.
In maniera simile, si può considerare il segno di f 00 , qualora esista:
f 0 (x0 ) = 0,
f 00 (x0 ) > 0
=⇒
x0
punto di minimo relativo;
f 0 (x0 ) = 0,
f 00 (x0 ) < 0
=⇒
x0
punto di massimo relativo.
Nota bene! Si tratta solo di condizioni sufficienti (ad esempio, x4 in x0 = 0. . . )
Punti di singolarità
Asintoti verticali. Se x→x
lim f (x) vale +∞ o −∞, la funzione ha in x = x0 un asinto0
to verticale. Lo stesso è vero nel caso in cui sia il limite destro che il limite sinistro
tendano a +∞ o −∞, ma con segni opposti.
72
CAPITOLO 4. ANALISI LOCALE
Zeri del denominatore di una funzione razionale (che non siano zeri del numeratore), corrispondono a punti di asintoto verticale.
Punti angolosi e cuspidi.
Sia f continua in x0 ma non derivabile in x0 .
Se esistono finiti i limiti lim± f 0 (x) = `± , il punto x0 si chiama punto angoloso (o
x→x0
spigolo). Per disegnarlo, si possono tracciare le tangenti destra e sinistra y = f (x0 ) +
`± (x − x0 ).
Se i limiti destro e sinistro di f 0 sono ±∞ si possono avere due situazioni:
– se lim± f 0 (x) = +∞ (−∞), il punto x0 è un punto a tangente verticale;
x→x0
– se i limiti destro e sinistro sono ±∞, ma con segni opposti, il punto x0 è una
cuspide.
Comportamento asintotico
La funzione f ha un asintoto orizzontale (di equazione y = `) per x → +∞ se
lim f (x) = ` ∈ R,
x→+∞
La funzione f ha un asintoto obliquo (di equazione y = ax + b) per x → +∞ se
lim [f (x) − (ax + b)] = 0
x→+∞
per qualche
a, b ∈ R.
Per determinare la presenza di un asintoto orizzontale od obliquo:
(i) calcolare lim f (x): se esiste finito, c’è un asintoto orizzontale; se non
x→+∞
esiste, non c’è asintoto; se il limite è +∞ o −∞ si va a (ii);
(ii) calcolare lim f (x)/x: se esiste finito, il suo valore è a e si va a (iii), se il
x→+∞
limite non esiste o se vale ±∞, non c’è asintoto obliquo;
(iii) calcolare lim [f (x) − ax]: se esiste finito, il suo valore è b, la funzione
x→+∞
ha asintoto obliquo di equazione y = ax + b; se il limite non esiste o se vale
±∞, non c’è asintoto obliquo.
Dopo (i), se esiste finito lim f 0 (x), allora a è uguale al valore di questo limite e si prosegue da
x→+∞
(iii). Se il limite di f 0 non esiste, bisogna seguire il procedimento esposto sopra.
Altri profili asintotici. In generale, se f (x) = g(x) + h(x) con h che tende a 0 per x → ∞,
il grafico della funzione f tende verso quello della funzione g. Non esiste alcuna strategia
generale per determinare una decomposizione di questo genere.
Capitolo 5
Analisi globale
5.1
Problemi quotidiani
Per iniziare, presentiamo alcuni problemi che conducono allo studio di proprietà globali di funzioni opportune. Quanto meno per avere un’idea della motivazione di quel
che diremo dopo.
Problema 1. Abbiamo già considerato il problema di determinare il cilindro di volume
V = k = costante con superficie totale S minima, con l’obiettivo (malcelato) di diventare ricchi grazie all’uso della matematica, applicando il risultato alla costruzione
di scatole di fagioli, o, più in generale, di confezioni cilindriche con minima spesa di
materiali. La speranza si era presto infranta quando ci siamo resi conto che per via
elementare non riuscivamo a determinare il minimo della funzione S, cioè a risolvere
il problema (r =raggio della base del cilindro)
k
determinare il minimo di S(r) = 2π r +
πr
!
2
r > 0.
Torniamo al problema con la conoscenza delle derivate e studiamo la monotonı̀a della
funzione:
!
!
dS
k
4π 3
k
= 2π 2r − 2 = 2 r −
.
dr
πr
r
2π
Perciò S 0 (r) ≥ 0 se e solo se r ≥ r∗ dove r∗ = (k/2π)1/3 . Quindi la funzione S è decrescente in (0, r∗ ) ed è crescente in (r∗ , ∞). Ne segue che il punto di minimo richiesto
esiste ed è proprio r = r∗ . Problema risolto, corriamo in fabbrica!
Problema 2. Vogliamo dimostrare la disequazione
xp − 1 ≥ p(x − 1)
∀p > 1,
∀x ≥ 0.
Fissiamo p > 1 e consideriamo la funzione
F (x) = xp − 1 − p(x − 1)
73
x ≥ 0.
74
CAPITOLO 5. ANALISI GLOBALE
Dato che F 0 (x) = p(xp−1 − 1) ne segue che F 0 (x) < 0 per x ∈ [0, 1) e F 0 (x) > 0 per
x ∈ (1, +∞). Quindi la funzione F è decrescente in [0, 1) e crescente in (1, +∞) e x = 1
è un punto di minimo. Ne segue che
F (x) ≥ F (1) = 0,
da cui la conclusione.
Problema 3. Siano a1 , a2 , . . . , an ∈ R assegnati. Supponiamo di voler determinare
x ∈ R tale che sia minima la quantità
n
X
(ai − x)2 .
(5.1)
i=1
Possiamo immaginare che i valori ai provengano da misurazioni di un fenomeno sotto
osservazione e che si stia cercando un valore medio per questi valori, che minimizzi
l’errore commesso misurato dal valore in (5.1). Dato che si cerca un punto di minimo,
consideriamo la funzione F (x) =
n
P
(ai − x)2 e calcoliamone la derivata. Si ha
i=1
n
X
n
X
n
1X
x = 2n x −
ai −
ai .
F (x) = −2 (ai − x) = −2
n i=1
i=1
i=1
i=1
0
"
n
X
#
La funzione F è quindi decrescente alla sinistra di (
n
P
"
#
ai )/n e crescente alla destra. Il
i=1
valore
x=
n
1X
ai
n i=1
è il punto di minimo (e coincide con la media aritmetica di a1 , . . . , an ).
Allo stesso modo, dati a1 , a2 , . . . , an ∈ R, se si vuole minimizzare
n
P
λi (ai − x)2 dove
i=1
λ1 , . . . , λn > 0 sono pesi (positivi), bisogna scegliere x uguale alla media pesata degli ai :
n
P
λi ai
x = i=1
.
n
P
λi
i=1
5.2 A caccia di massimi e minimi assoluti
Come abbiamo visto nel paragrafo precedente, in molte situazioni ci si trova a dover
determinare il minimo o il massimo di una funzione assegnata. Ricordiamo ancora
una volta che se f : I → R è una funzione, un punto x0 ∈ I è punto di massimo se vale
f (x) ≤ f (x0 )
∀ x ∈ I.
5.2. A CACCIA DI MASSIMI E MINIMI ASSOLUTI
75
Il valore f (x0 ) = max f (x) è il massimo di f in I. Analogamente per i minimi.
x∈I
Talvolta per distinguere in modo più chiaro il massimo e il minimo dagli analoghi
concetti locali (massimi e minimi relativi), si parla di massimo assoluto e di minimo
assoluto.
Chiaramente un massimo (assoluto) è, a maggior ragione, un massimo relativo.
Non è difficile immaginare funzioni che ammettano massimi relativi che non sono
massimi assoluti.
Consideriamo ad esempio la funzione f (x) = x4 − x2 è tale che
f (0) = 0,
f (x) ≤ 0
∀x ∈ (−1, 1),
e quindi 0 è un punto di massimo relativo, ma non è di massimo assoluto dato che
lim f (x) = +∞.
x→±∞
Abbiamo già detto che le soluzioni di f 0 (x) = 0 (cioè i punti critici di f ) permettono
di determinare i possibili candidati a punti di minimo o massimo relativo interno derivabile. Chiaramente, è possibile che un estremo relativo cada in un punto in cui la
funzione non è derivabile.
A questo punto possiamo definire una strategia per individuare il massimo ed il
minimo di una funzione continua in un intervallo [a, b] (per il Teorema di Weierstrass,
massimo e minimo di f esistono):
? determinare l’insieme S dei punti stazionari in (a, b);
? determinare l’eventuale insieme N dei punti in cui f non è derivabile;
? calcolare la funzione:
(i) in S,
(ii) in N ,
(iii) negli estremi dell’intervallo a e b.
? individuare il più grande e il più piccolo tra i valori calcolati.
Esercizio. Determinare il massimo ed il minimo assoluti della funzione f (x) =
(x2 − 5x + 7)ex per x ∈ [0, 2].
Soluzione. La funzione f è derivabile in tutto l’intervallo considerato. Per determinare i punti singolari:
f 0 (x) = (2x − 5)ex + (x2 − 5x + 7)ex = (x2 − 3x + 2)ex = (x − 2)(x − 1)ex .
Quindi f 0 (x) = 0 se e solo se x = 1 o x = 2. L’insieme dei punti critici interni è
S = {1}. Dato che f (0) = 7 < f (2) = e2 < f (1) = 3e, si ha
min f (x) = f (0) = 7,
x∈[0,2]
che è quanto richiesto dall’esercizio.
max f (x) = f (1) = 3e,
x∈[0,2]
76
CAPITOLO 5. ANALISI GLOBALE
Spesso è utile conoscere il massimo del modulo di una funzione assegnata f , cioè
risolvere il problema
data f : [a, b] → R
continua,
calcolare max |f (x)|.
x∈[a,b]
In questo caso, si può procedere come detto sopra, o, alternativamente, determinare il
massimo ed il minimo della funzione f in [a, b] e poi sfruttare la relazione (evidente?)
n
o
max |f (x)| = max | max f (x)|, | min f (x)| .
x∈[a,b]
x∈[a,b]
x∈[a,b]
Esercizio. Data f (x) = |x2 − 1|, calcolare
max{|f (x)| : x ∈ [−1, 2]}
Soluzione. Il minimo ed il massimo della funzione x2 − 1 in [−1, 2] sono, evidentemente, −1, raggiunto in x = 0 e 3 in x = 2. Quindi
n
o
max |x2 − 1| = max | − 1|, |3| = 3.
x∈[−1,2]
Un buon esercizio è determinare il massimo di |x2 − 1| in [−1, 2] usando la strate-
Figura 5.1: Il grafico di f (x) = |x2 − 1|
gia (punti critici/punti non derivabili/estremi) direttamente sulla funzione con il
modulo.
La ricerca del minimo di |f (x)| è banale (vale 0) nel caso in cui la funzione f si annulli in
qualche punto. Se invece non ci sono zeri di f , vale
n
o
min |f (x)| = min | max f (x)|, | min f (x)| .
x∈[a,b]
x∈[a,b]
x∈[a,b]
Ad esempio, per la funzione considerata prima, |x2 − 1| in [−1, 2], ci sono due zeri x = ±1 e
quindi min |x2 − 1| = 0.
x∈[−1,2]
Nel caso in cui si studi una funzione f continua, ma definita su un dominio illimitato (ad esempio, f : [a, +∞) → R), le ipotesi del Teorema di Weierstrass non sono
5.3. CONCAVITÀ E CONVESSITÀ
77
soddisfatte e quindi non è detto che esistano il massimo ed il minimo della funzione.
Comunque ha senso domandarsi: quanto valgono l’estremo superiore e l’estremo inferiore?
Nel caso in cui siano finiti, si tratta di massimo o di minimo? La strategia per risolvere questo problema è simile a quanto appena visto. Il punto che bisogna modificare è quello
relativo al calcolo della funzione negli estremi dell’intervallo. In questo caso almeno
uno degli estremi dell’intervallo sarà +∞ o −∞ e le espressioni f (+∞) e f (−∞), in
generale, non hanno senso, ma vanno sostituite con lim f (x). Vediamo la procedura
x→±∞
in un esempio.
Esercizio. Determinare l’estremo superiore e l’estremo inferiore della funzione
2
f (x) = e−x in R e dire se si tratta di massimo e minimo.
2
Soluzione. La funzione è derivabile su tutto R e la derivata vale f 0 (x) = −2xe−x .
Quindi c’è un unico punto critico x = 0 in cui la funzione vale f (0) = 1. Inoltre
2
2
lim e−x = lim e−x = 0.
x→−∞
x→+∞
Confrontando i valori deduciamo che
2
inf e−x = 0
x∈R
2
sup e−x = f (0) = 1.
x∈R
Dato che l’estremo superiore fa parte dell’insieme immagine, l’estremo superiore è massimo. Invece l’estremo inferiore non è minimo, perchè la funzione f è
2
strettamente positiva: e−x > 0 per ogni x ∈ R.
Analogamente nel caso di funzioni continue definite in insiemi non chiusi, cioè
f : (a, b) → R oppure f : [a, b) → R, o varianti, non si applica il Teorema di Weierstrass. Anche in questi casi, per determinare l’estremo superiore/inferiore bisogna
considerare i limiti agli estremi.
5.3
Concavità e convessità
Fino a questo punto, abbiamo individuato quali proprietà siano fornite dalla derivata
prima. Che indicazioni dà la derivata seconda? Per rispondere a questo angosciante interrogativo, introduciamo la nozione di convessità, che riguarda le funzioni il cui grafico
si trova al di sotto di quello delle sue corde.
Definizione 5.3.1 Una funzione f : [a, b] → R è convessa in [a, b] se
f (tx + (1 − t)y) ≤ tf (x) + (1 − t)f (y)
∀ x, y ∈ [a, b]
Una funzione per cui valga la disuguaglianza opposta si dice concava.
∀ t ∈ (0, 1).
(5.2)
78
CAPITOLO 5. ANALISI GLOBALE
Figura 5.2: Una funzione convessa ed una non convessa.
Dalla definizione segue che se f è concava, allora −f è convessa, e viceversa.
Quindi studiare la convessità è sufficiente per comprendere anche la concavità.
Cerchiamo di capire il significato geometrico della condizione (5.2). Fissiamo x = x̄
e y = ȳ con x̄ < ȳ. Per t ∈ (0, 1), definiamo z(t) := tx̄ + (1 − t)ȳ ∈ (x̄, ȳ). Scriviamo la
retta che passa per (x̄, f (x̄)) e (ȳ, f (ȳ)):
Φ(x) = f (x̄) +
f (ȳ) − f (x̄)
(x − x̄),
ȳ − x̄
e calcoliamo questa funzione in z(t). Dato che
f (ȳ) − f (x̄)
(tx̄ + (1 − t)ȳ − x̄)
ȳ − x̄
f (ȳ) − f (x̄)
= f (x̄) +
(1 − t)(ȳ − x̄)
ȳ − x̄
= f (x̄) + (f (ȳ) − f (x̄))(1 − t) = tf (x̄) + (1 − t)f (ȳ),
Φ(z(t)) = f (x̄) +
la condizione (5.2), si può riscrivere come
f (z(t)) ≤ Φ(z(t))
∀ x, y ∈ [a, b]
∀ t ∈ (0, 1).
Questa scrittura ha un interpretazione in termini di grafico immediata: una funzione f
è convessa, se per ogni scelta di x e y nel dominio di definizione, il grafico di f è al di sotto della
retta secante che congiunge i punti (x, f (x)) e (y, f (y)) nell’intervallo di estremi x e y.
Proposizione 5.3.2 Una funzione f : [a, b] → R è convessa in [a, b] se e solo se
f (z) − f (x)
f (y) − f (x)
f (y) − f (z)
≤
≤
z−x
y−x
y−z
per ogni x, y, z tali che a ≤ x < z < y ≤ b.
(5.3)
5.3. CONCAVITÀ E CONVESSITÀ
79
La dimostrazione di questa proprietà si ottiene semplicemente riscrivendo in termini di rapporti incrementali la formula (5.2). I dettagli sono lasciati alla buona volontà
del lettore.
La proprietà (5.3) può essere interpretata graficamente in termini di monotonı́a
delle pendenza delle secanti. Quando la funzione è derivabile, questa proprietà di
monotonia diviene una richiesta di monotonia della funzione derivata prima. Nel caso
in cui la funzione f sia derivabile due volte, la monotonı́a della f 0 può essere tradotta
in termini di segno della derivata seconda f 00 .
Teorema 5.3.3 (Teorema di Convessità).
Sia f : [a, b] → R. Allora
(i) se f è derivabile una volta, f convessa in [a, b] se e solo se f 0 è debolmente
crescente in [a, b];
(ii) se f è derivabile due volte, f è convessa in [a, b] se e solo se f 00 ≥ 0 in [a, b].
Per le funzioni concave, vale un risultato analogo sostituendo a “f 0 crescente” la
frase “f 0 debolmente decrescente” e a “f 00 ≥ 0” la frase “f 00 ≤ 0”.
La dimostrazione verrà data più avanti.
Anche il Teorema di Convessità ha un’interpretazione geometrica: se la funzione f
è derivabile e convessa, il suo grafico è sempre al di sopra della retta tangente in qualsiasi suo
punto. Infatti, scriviamo la differenza tra f e la retta tangente in (x0 , f (x0 ))
Rx0 (x) = f (x) − f (x0 ) − f 0 (x0 )(x − x0 ),
con l’obiettivo di dimostrare che se f è convessa, la funzione Rx0 (x) è positiva. Applichiamo il teorema di Lagrange e riscriviamo Rx0 (x) come
Rx0 (x) = f 0 (ξ)(x − x0 ) − f 0 (x0 )(x − x0 ) = (f 0 (ξ) − f 0 (x0 ))(x − x0 ).
Se x > x0 allora ξ > x0 e quindi, essendo f 0 crescente, f 0 (ξ) > f 0 (x0 ). Ne segue che
il termine a destra è positivo perché prodotto di termini positivi. Se x < x0 allora
ξ < x0 e, sempre per la monotonı́a di f 0 , f 0 (ξ) < f 0 (x0 ). Questa volta i due termini sono
entrambi negativi, ma comunque il loro prodotto è positivo.
Riassumendo, per la convessità abbiamo tre interpretazioni:
– il grafico di f è sotto il grafico della secante;
– le pendenze delle secanti sono monotone;
– il grafico della funzione è al di sopra di quello della tangente.
In corrispondenza abbiamo varie maniere analitiche per studiare la convessità di
una funzione. Quelle più semplici da utilizzare concretamente sono quelle contenute
nel Teorema di Convessità e che fanno ricorso alle derivate della funzione. In particolare, la caratterizzazione delle funzioni convesse derivabili due volte è estremamente
comoda perché riduce il problema alla risoluzione di una disequazione: f 00 (x) ≥ 0.
80
CAPITOLO 5. ANALISI GLOBALE
Definizione 5.3.4 Un punto x0 tale che f sia convessa alla destra di x0 e concava alla sinistra,
o viceversa, si chiama punto di flesso.
Grazie al Teorema 5.3.3, se f 00 a segno opposto alla destra e alla sinistra di x0 ,
necessariamente x0 è un punto di flesso.
Ad esempio, consideriamo la funzione f (x) = sin x. La sua derivata seconda è
f 00 (x) = − sin x, quindi tutti punti della forma x = kπ per k ∈ Z sono punti di
1
flesso. Per la funzione f (x) = 1+x
2 , si ha
f 0 (x) = −
2x
(1 + x2 )2
=⇒
f 00 (x) =
2(3x2 − 1)
,
(1 + x2 )3
√
e quindi i√punti di flesso
di
f
sono
x
=
±1/
3. La √funzione f è convessa in
√
√
(−∞, −1/ 3) e in (1/ 3, +∞) e concava in (−1/ 3, 1/ 3).
La convessità è utile per determinare l’esistenza di minimi di una funzione. Infatti,
vale la seguente implicazione
f
convessa,
f 0 (x0 ) = 0
=⇒
x0
punto di minimo.
La dimostrazione è lasciata per esercizio. Analogamente, per le funzioni concave ed
i punti di massimo. Chiaramente se la convessità è solo locale (cioè in un intorno del
punto x0 ), x0 è punto di minimo relativo.
Dimostrazione del Teorema di Convessità.
(i) Supponiamo che f sia convessa, allora vale la (5.3). Quindi, passando al limite per z → x+
si ottiene
f (y) − f (x)
f 0 (x) ≤
.
y−x
Analogamente, passando al limite nella (5.3) per z → y − ,
f (y) − f (x)
≤ f 0 (y).
y−x
Ne segue che f 0 (x) ≤ f 0 (y) per ogni x ≤ y.
Viceversa, supponiamo che la funzione f 0 sia crescente e dimostriamo la (5.2) studiando la
funzione differenza
F (t) := tf (x) + (1 − t)f (y) − f (tx + (1 − t)y),
t ∈ [0, 1],
con x, y fissati. Consideriamo il caso y < x (l’altro è analogo). Calcolando la derivata di F e
applicando il Teorema di Lagrange (Teorema 3.1.1) si deduce che esiste ξ ∈ (y, x) tale che
h
i
F 0 (t) = f (x) − f (y) − f 0 (tx + (1 − t)y)(x − y) = f 0 (ξ) − f 0 (tx + (1 − t)y) (x − y).
5.3. CONCAVITÀ E CONVESSITÀ
81
Dato che, per t ∈ [0, 1], il punto tx + (1 − t)y descrive l’intervallo [y, x], esiste t∗ tale che t∗ x +
(1 − t∗ )y = ξ. Inoltre, dato che f 0 è debolmente crescente, f 0 (tx + (1 − t)y) ≤ f 0 (ξ) per t ∈ [0, t∗ ]
e f 0 (tx + (1 − t)y) ≥ f 0 (ξ) per t ∈ [t∗ , 1]. Perciò:
F 0 (t) ≥ 0
per t ∈ [0, t∗ ]
e
F 0 (t) ≤ 0
per t ∈ [t∗ , 1].
Se ne deduce che il minimo assoluto della funzione F è assunto in uno degli estremi t = 0 o
t = 1 e, dato che F (0) = F (1) = 0, si ottiene F (t) ≥ 0 per ogni t ∈ [0, 1], cioè la (5.2).
∗
Continuità delle funzioni convesse.
Una funzione convessa in un intervallo è necessariamente continua nei punti interni:
f : [a, b] → R
convessa
⇒
f
è continua in
(a, b).
Dimostrazione. Fissato x ∈ (a, b), scegliamo y ∈ (x, b) che successivamente faremo tendere ad x stesso. Tenuto conto della convessità, i rapporti incrementali
verificano
f (y) − f (a)
f (y) − f (x)
≤
y−a
y−x
e
f (y) − f (x)
f (b) − f (x)
≤
,
y−x
b−x
da cui segue
f (y) − f (a)
f (b) − f (x)
(y − x) ≤ f (y) − f (x) ≤
(y − x).
y−a
b−x
La seconda delle due disequazioni è estremamente utile: quando y → x, il termine
a destra tende ad 0. Ora occorre una stima dal basso. Il problema della prima
disequazione è che la dipendenza da y è sia nel termine y − x (che ci fa comodo)
(a)
che nel rapporto incrementale f (y)−f
. Il problema è: siamo in grado di controly−a
lare il valore del rapporto incrementale
incrementale
f (y)−f (a)
y−a
f (y)−f (a)
y−a
per y ≈ x? Dato che il rapporto
è crescente in y, riesce
f (y) − f (a)
f (x) − f (a)
≤
.
x−a
y−a
Quindi, per y > x,
f (b) − f (x)
f (x) − f (a)
(y − x) ≤ f (y) − f (x) ≤
(y − x).
x−a
b−x
Passando al limite y → x+ , ne segue che
lim f (y) − f (x) = 0.
y→x+
In maniera analoga si deduce che lim f (y) = f (x).
y→x−
E’ vero o è falso che una funzione convessa in [a, b] è continua in tutto l’intervallo [a, b]?
82
CAPITOLO 5. ANALISI GLOBALE
5.4
Scheda riassuntiva
Problemi quotidiani
k
Pb.1. Determinare il minimo di S(r) = 2π r +
πr
2
Dato che S 0 (r) =
4π
r2
k
2π
r3 −
!
per r > 0.
, la funzione S è decrescente in (0, r∗ ) ed è crescente in (r∗ , ∞)
dove r∗ = (k/2π)1/3 . Ne segue che il punto di minimo è in r = r∗ .
Pb.2. Dimostrare la disequazione xp − 1 ≥ p(x − 1)
∀p > 1,
∀x ≥ 0.
Fissato p > 1, la funzione F (x) = xp −1−p(x−1)
x ≥ 0 è decrescente in [0, 1) e crescente
in (1, +∞) e x = 1 è un punto di minimo. Ne segue che F (x) ≥ F (1) = 0, da cui la conclusione.
Pb.3. Dati a1 , a2 , . . . , an ∈ R, determinare x ∈ R tale che F (x) =
Dato che
F 0 (x)
= 2n x −
destra. Il valore x =
1
n
Pn
1
n
i=1 ai
n
P
n
P
ai , F è decrescente alla sinistra di (
i=1
(ai − x)2 sia minimo.
i=1
n
P
ai )/n e crescente alla
i=1
è il punto di minimo.
A caccia di massimi e minimi assoluti
Per distinguere in modo più chiaro il massimo e il minimo dai massimi e minimi
relativi, si parla di massimo assoluto e di minimo assoluto.
Strategia per individuare il massimo ed il minimo di f continua in [a.b]
? determinare l’insieme S dei punti stazionari in (a, b);
? determinare l’eventuale insieme N dei punti in cui f non è derivabile;
? calcolare la funzione in S, in N e negli estremi dell’intervallo a e b.
? individuare il più grande e il più piccolo tra i valori calcolati.
Per determinare il massimo del modulo di una funzione f
n
o
max |f (x)| = max | max f (x)|, | min f (x)| .
x∈[a,b]
x∈[a,b]
x∈[a,b]
Nel caso di una funzione f continua, ma definita su un dominio illimitato o non chiuso
ha senso domandarsi: quanto valgono l’estremo superiore e l’estremo inferiore? La strategia
per risolvere questo problema è simile a quanto appena visto. Il punto che bisogna
modificare è quello relativo al calcolo della funzione negli estremi dell’intervallo.
5.4. SCHEDA RIASSUNTIVA
83
Concavità e convessità
Definizione 5.3.1.
Una funzione f : [a, b] → R è convessa in [a, b] se
f (tx + (1 − t)y) ≤ tf (x) + (1 − t)f (y)
∀ x, y ∈ [a, b]
∀ t ∈ (0, 1).
Una funzione per cui valga la disuguaglianza opposta si dice concava.
Geometricamente, f è convessa, se per ogni x e y, il grafico di f è al di sotto della retta
secante che congiunge i punti (x, f (x)) e (y, f (y)) nell’intervallo di estremi x e y.
Proposizione 5.3.2. Una funzione f : [a, b] → R è convessa in [a, b] se e solo se
f (y) − f (x)
f (y) − f (z)
f (z) − f (x)
≤
≤
z−x
y−x
y−z
∀ x, y, z
tali che
≤ x < z < y ≤ b.
La Proposizione 5.3.2 esprime il fatto che, se f è convessa, le pendenze delle secanti
sono monotone.
Teorema 5.3.3 (Teorema di Convessità).
Sia f : [a, b] → R. Allora
(i) se f è derivabile una volta, f convessa in [a, b] se e solo se f 0 è debolmente crescente in [a, b];
(ii) se f è derivabile due volte, f è convessa in [a, b] se e solo se f 00 ≥ 0 in [a, b].
Per le funzioni concave, vale un risultato analogo sostituendo a “f 0 crescente” la
frase “f 0 debolmente decrescente” e a “f 00 ≥ 0” la frase “f 00 ≤ 0”.
Dal Teorema 5.3.3 discende un’ulteriore interpretazione geometrica della convessità: se la funzione f è derivabile e convessa, il suo grafico è sempre al di sopra della retta
tangente in qualsiasi suo punto.
Definizione. Un punto x0 tale che f sia convessa alla destra di x0 e concava alla sinistra,
o viceversa, si chiama punto di flesso.
Grazie al Teorema 5.3.3, se f 00 a segno opposto alla destra e alla sinistra di x0 ,
necessariamente x0 è un punto di flesso.
La convessità è utile per determinare l’esistenza di minimi di una funzione:
f
convessa,
f 0 (x0 ) = 0
=⇒
x0
punto di minimo.
Analogamente, per le funzioni concave ed i punti di massimo.
∗
Continuità delle funzioni convesse.
Una funzione convessa in un intervallo è necessariamente continua nei punti interni:
f : [a, b] → R
convessa
⇒
f
è continua in
(a, b).