Fisica 1
Gravitazione
Programma della lezione
•
•
•
•
Richiami matematici sulle coniche
Leggi di Keplero
Legge di gravitazione di Newton
Soluzione del problema dei due corpi
– Scelta del sistema di riferimento
– Momento della quantita` di moto
– Energia
• Dimostrazione delle leggi di Keplero
• Considerazioni sull’energia
Richiami di matematica:
le coniche
•
In coordinate polari, scelto uno dei fuochi come origine, l’equazione di
una conica è
1
r
•
•
•
p1 ecos
ove r è la distanza tra un punto della conica e il fuoco e è l’angolo
compreso tra l’asse della conica e il vettore r
e è detta eccentricità della conica
Si può mostrare che la formula scritta rappresenta sempre una conica,
il cui tipo
dipende dal valore dell’eccentricità: e<1 ellisse, e=1
parabola, e>1 iperbole
r
Richiami di matematica:
l’ellisse
• L’ellisse è caratterizzata dal fatto che la somma delle distanze di
un punto dai fuochi è costante
PF1 PF2 const.
• Detto E il centro dell’ellisse, EB=a è il semiasse maggiore ed ED=b
il semiasse minore
• La distanza dei fuochi dal centro è EF2=EF1=ea
• Il semiasse minore si
può esprimere in funzione del semiasse
maggiore e dell’eccentricità:
2
2
2 2
2
2
D
P
b a a e a 1 e
L’area dell’ellisse è
A
F1
E
B
F2
C
A ab
Quanto vale la costante?
Dimostrare la relazione tra b
e a, e
Gravitazione universale
• Agisce tra due corpi qualunque dotati di massa
• Supponiamo inizialmente che le masse abbiano
dimensione trascurabile rispetto alla distanza
reciproca (caso ideale di masse “puntiformi”)
• È descritta dalla legge di Newton
m1m2
F21 G 2 r12
r
• Ove F21 è la forza agente sulla massa 2, dovuta alla
massa 1, m1 e m2 sono le masse dei corpi, r la loro
distanza, r12 il versore orientato da 1 a 2
• La combinazione -r12 il indica che la forza è attrattiva
Gravitazione universale
• G è una costante fisica universale di dimensioni (nel
sistema MKS)
2
F
L
3 2
1
G
L
T
M
M2
• E di valore
11
G 6.76 10
3
m
kg s2
Energia potenziale gravitazionale
• Dalla legge di forza
k
F 2 r
r
• possiamo calcolare l’energia potenziale:
r
V r V V r F dl
r
k
k
k
Fdr 2 dr
r
r
r
r
r
dl
F
r
Leggi di Keplero
• Newton arrivò alla sua legge studiando l’opera di
Keplero, il quale aveva enunciato tre leggi valide per
il moto dei pianeti del sistema solare
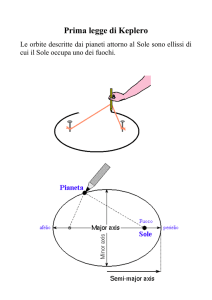
• Prima legge: l’orbita percorsa da un pianeta giace su
di un piano e ha forma di ellisse, di cui il sole occupa
uno dei due fuochi
Leggi di Keplero
• Useremo un sistema di coordinate polari per descrivere
l’orbita del pianeta
• Il raggio vettore r, con origine nel sole e vertice nel
pianeta, è definito dal modulo r e dall’angolo (detto
anomalia o azimut)
• Il punto A in cui il pianeta è più lontano dal sole è detto
afelio; il punto B in cui il pianeta è più vicino al sole è detto
perielio
• Entrambi son detti apsidi
r
A
B
Leggi di Keplero
• La prima legge si può esprimere matematicamente
1
p1 ecos
r
• Ove p ed e sono due parametri orbitali: e è
l’eccentricità dell’orbita (sempre <1 per un’ellisse)
• Esercizio: esprimere p in funzione degli altri parametri
orbitali analizzando, p.e., il perielio (r=a-ae, =0)
1
p
2
a1 e
Leggi di Keplero
• Seconda legge: l’area “spazzata” dal raggio vettore
è proporzionale al tempo impiegato per spazzarla:
A=kt, in termini infinitesimi: dA=kdt
dA
k
• Ovvero: la velocità areale è costante
dt
• Storicamente fu scoperta per prima
A
B
• Possiamo esprimere
la costante k
mediante l’area e il
periodo
A ab
k
T
T
Leggi di Keplero
• Terza legge: il quadrato del periodo di rivoluzione di
un pianeta attorno al sole è proporzionale al cubo del
semiasse maggiore dell’orbita
T 2 ka3
• La costante di proporzionalità è uguale per tutti i
pianeti
• Una legge
analoga vale per il sistema di Giove e i
suoi satelliti
• La costante è uguale per tutti i satelliti (ma è diversa
da quella del sistema Sole-pianeti, come vedremo)
Il problema dei due corpi
• Consideriamo un sistema isolato costituito da due
masse puntiformi interagenti con forza newtoniana
• Sia S un sistema di riferimento inerziale in cui
descrivere il sistema dei due corpi
r
r2
r1
• Siano r1 e r2 i vettori
posizione (in S) delle due
masse
• La forza mutua dipende solo
dal vettore r tra le due masse:
r = r 2 - r1
m1m2
F12 G 2 r
r
m1m2
F21 G 2 r
r
Il problema dei due corpi
• Introduciamo anche il vettore R, posizione del
centro di massa:
m1r1 m2 r2
R
m1 m2
r
R
• Le trasformazioni inverse
permettono di esprimere r1 e r2
in funzione di R e r
m2
r1 R
r
m1 m2
r1
m1
r2 R
r
m1 m2
r2
Il problema dei due corpi
• Poiché il sistema è isolato, il centro di massa si
muove di moto rettilineo uniforme
dR
const.
dt
• Possiamo sfruttare questo risultato per scegliere un
sistema di riferimento inerziale più conveniente S’:
uno con l’origine O’ coincidente con il centro di massa
dei due corpi (i due punti coincidono e traslano
assieme)
• D’ora in poi, anche se con abuso di notazione,
continueremo ad usare gli stessi simboli nel nuovo
sistema S’ (però ora R=0)
Il problema dei due corpi
• Risolvere il problema significa trovare la dipendenza
di r dal tempo. Una volta noto r, le coordinate delle
masse si ottengono (ora R=0) semplicemente da
m1
m2
r2
r
r1
r
m1 m2
m1 m2
• Un fatto importante è che nel sistema S’, le velocità v1
e v2 sono parallele
m1
m
dR
m1
2
0
v1
v2
v 2 v1
dt m1 m2
m1 m2
m
2
• Ciò significa che i vettori v1, v2 e r sono complanari
Forze centrali
• La forza gravitazionale rientra in un tipo più
generale di forze, dette centrali
• Queste forze hanno l’importante proprietà di
essere dirette lungo la congiungente dei
corpi in interazione, cioè lungo r e dipendere
solo da r
m1m2
F12 G 2 r f rr
r
Il momento delle forze
• Calcoliamo il momento delle forze interne, sfruttando il
fatto che la forza è centrale:
M r1 F12 r2 F21 r1 F12 r2 F12
r1 r2 F12 r f rr 0
• L’annullarsi del momento delle forze, implica che il
momento della quantità di moto sia costante
dL
M 0
dt
L const.
Il momento della qdm
• Abbiamo mostrato che v1, v2 e r sono complanari
• Ne segue che i vettori mqm dei due corpi sono
paralleli
• Calcoliamo ora il mqm totale
L l1 l2 r1 m1v1 r2 m2v2
• Il fatto che l1, l2 (e quindi L) siano paralleli, assieme
al fatto che L si conservi, significa che il moto dei
due corpi avviene su di un piano (perpendicolare a
L e contenente v1, v2, r)
• Il problema è quindi ridotto a due dimensioni.
Scegliamo il sistema S’ su questo piano: un
sistema di riferimento polare di coordinate r e
Il momento della qdm
• Il vettore r potrà ruotare attorno al punto O’ (e
anche cambiare lunghezza )
• Ciò significa che la velocità angolare delle
due masse è uguale
d1 d2 d
dt
dt
dt
d2
d1
O’
Il momento della qdm
• Tenendo conto del parallelismo dei due mqm e
detta v la componente azimutale della velocità, il
modulo L è
L r1m1v1 sin 1 r2 m2v2 sin 2
r1m1v1 r2 m2 v2
v
v
r
vr
Il momento della qdm
• Ovvero
d
d
2
2 d
L r1m1r1
r2m2r2
m1r1 m2r2
dt
dt
dt
• Esprimendo r1 e r2 in funzione di r, (R=0), otteniamo
2
2
m2
m1
d
L m1
r m2
r
m1 m2
m1 m2
dt
m1m2 2 d
2 d
r
r
m1 m2 dt
dt
Il momento della qdm
• Ove è una costante con le dimensioni di una
massa, detta massa ridotta
• Il risultato ottenuto
2 d
L r
dt
• si può interpretare dicendo che il sistema dei due
corpi è equivalente ad un solo corpo di massa a
distanza r da un centro fisso di forza
• Risultato utile
per esprimere la velocità angolare in
funzione della distanza r (e delle costanti , L)
d
L
2
dt r
2a legge di Keplero
• Siamo ora in grado di dimostrare questa legge
nell’ambito della teoria di Newton
• Esprimiamo l’area del
triangolo infinitesimo
SP1P2 in coordinate
polari
P1
P2
S
1
1 2
dA rrd r d
2
2
2a legge di Keplero
• Dividendo per il tempo otteniamo la velocità
areale
dA 1 2 d
r
dt 2 dt
• Per quanto detto sul momento della qdm
abbiamo
dA L
const.
dt 2
CDD
• Da notare che abbiamo usato soltanto il fatto
che la FG è di tipo centrale: il risultato è
quindi valido per qualunque forza centrale
Energia
• Finora abbiamo usato la legge di
conservazione della qdm
• Usiamo ora una seconda legge di
conservazione, quella dell’energia
E T V const.
• Ove T è l’energia cinetica delle due masse e
V (già calcolata) è l’energia potenziale
gravitazionale
dovuta all’attrazione mutua
Energia cinetica
• Calcoliamo l’energia cinetica
1
1
2
T m1v1 m2v 22
2
2
2
2
1 dr1 1 dr2
m1 m2
2 dt 2 dt
2
2
1 m2 dr 1 m1 dr
m1
m2
2 m1 m2 dt 2 m1 m2 dt
2
2
1 m1m2 dr 1 dr
2 m1 m2 dt 2 dt
Energia cinetica
• Di nuovo possiamo interpretare dicendo che
per quanto riguarda T, il sistema dei due corpi
equivale ad un corpo solo di massa ridotta
2
1 dr
T
2 dt
• Esprimendo la velocità in termini delle
componenti radiale e azimutale:
v
2
2
1 dr
2 d
T r
dt
2 dt
v
r
vr
Energia
• Tornando all’energia
2
2
1 dr
2 d
E r V r
dt
2 dt
• Esprimendo la velocità angolare in funzione
di L e r e inserendo l’espressione di V,
otteniamo infine
2
1 dr
L2
k
E
2
2 dt 2r
r
Integrazione dell’equazione
• L’equazione (differenziale) precedente è
una relazione tra la coordinata r
(incognita), la sua derivata (incognita) e
due costanti del moto E e L (supposte
note)
• Possiamo esplicitare rispetto alla derivata
dr
2E 2k 1 L2 1
2 2
dt
r r
Integrazione dell’equazione
• Risolvere questa equazione ci darebbe la
distanza r (e quindi ) in funzione del tempo
• È più interessante però determinare r in
funzione dell’angolo , in questo modo
otteniamo l’equazione dell’orbita
• A tal fine riscriviamo la velocità radiale
dr dr d dr r 2
dt d dt d L
Integrazione dell’equazione
• Otteniamo infine
dr
2E 2 2k
r
r 2 r 1
2
d
L
L
• Quest’equazione si può risolvere per
quadrature:
d
dr
2E 2 2k
r
r 2 r 1
2
L
L
Integrazione dell’equazione
• L’integrando si può riportare ad una
forma standard con la sostituzione u=1/r
d
,
du
2E 2k
2
u
u
L2
L2
• L’integrale è della forma
b 2cu
1
arccos
2
2
c
b 4ac
a bu cu
du
Integrazione dell’equazione
• E quindi
2
L u 1
k
,
arccos
2EL2
1
2
k
• E tornando alla variabile r:
2EL2
,
2 1 1
cos
2
r L
k
1
k
1a legge di Keplero
• L’espressione precedente è della forma
1
p1 ecos
r
• Ove l’eccentricità è
2EL2
e 1
k 2
• E si è scelto ’=0 in corrispondenza del
perielio
CDD
1a legge di Keplero
• Nel caso in cui il sole sia identificato col
corpo 1 e un pianeta col corpo 2,
abbiamo
m pianeta
rsole
r 0
msole m pianeta
msole
rpianeta
r r
msole m pianeta
Il sole è praticamente fermo
Il corpo di massa ridotta e il
pianeta si possono identificare
m pianeta
Energia
• Torniamo all’espressione dell’energia
1 2
L2
k
E v r
2
2
2r
r
• Il primo termine del membro di destra è l’energia
cinetica radiale, il secondo termine è l’energia cinetica
azimutale, il terzo termine è l’energia potenziale
• Formalmente
possiamo considerare invece il secondo
termine come energia potenziale, aggiuntiva a quella
gravitazionale, di una particella fittizia di cui il primo
termine rappresenta tutta l’energia cinetica
• Questo modo di vedere ha il vantaggio di ridurre il
numero di dimensioni del problema da due a una
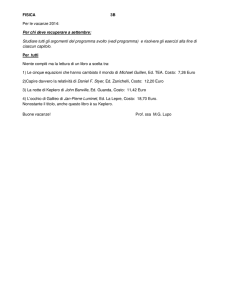
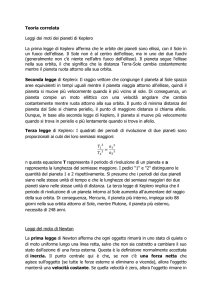
Energia
• Nella figura abbiamo
tracciato le due
energie potenziali con
linee tratteggiate e la
loro somma Vtot con
linea continua
• L’energia totale E è
una costante (retta
tratteggiata)
• La differenza tra E e
Vtot è l’energia
cinetica (freccia)
1 2
L2
k
E v
2
2
2r
r
r
Energia
• Per E>0, r assume un
valore minimo ma può
assumere valori
arbitrariamente
grandi: l’orbita è
aperta
E>0
T
r
L’eccentricità è >1, come dev’essere per un’iperbole
2
2
E
L
2EL
e 1
1
1
2
2
k
k
2
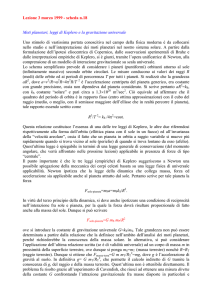
Energia
• Per E<0, r è compreso
tra un valore minimo e
uno massimo: l’orbita
è limitata (e chiusa)
T
E<0
r
L’eccentricità è <1, come dev’essere per un’ellisse
2 E L2
2EL2
e 1
1
1
2
2
k
k
3a legge di Keplero
• Come abbiamo visto, la 2a legge di Keplero
stabilisce che dA
L
dt
2
const.
• Integrando questa relazione su di un periodo di
L
rivoluzione, abbiamo
T
2
A ab
• Ricordando la relazione tra b, a ed e:
2
T a 1 e
L
2
2
3a legge di Keplero
• Dalla 1a legge di Keplero, applicata al perigeo,
avevamo trovato
1
p
• Ove ora
p
k
a1 e 2
L2
• Che ci permette di esprimere e in funzione di ,
L, k, a:
L
1 e
ka
2
3a legge di Keplero
• Ed infine
T 2
k
a
32
2
Gm1 m2
a3 2
• La teoria di Newton “verifica e smentisce” allo stesso
tempo la 3a legge di Keplero
• La smentisce in quanto la costante che compare nella
legge è diversa da pianeta a pianeta
• La conferma in quanto tale costante è con buona
approssimazione uguale per tutti i pianeti
2
2
Gmsole
Gmsole m pianeta
CDD
Masse estese
• Newton fece qualcosa di più: dimostrò
che la legge di forza ha la stessa
espressione anche per masse estese
con simmetria sferica
• Lo dimostreremo in elettrostatica
quando studieremo la legge di Gauss
Il problema degli n corpi
• Se si hanno tre o più corpi, qualunque
sia la forza d’interazione, il problema
non ammette, in generale, una
soluzione analitica
• Teoria delle perturbazioni
• Problema della stabilità del sistema
solare