Prova scritta dell’esame di TEORIA DEI SEGNALI
17/07/02
Studente (Cognome Nome)……………………………………………num. matric………………
Esercizio1.
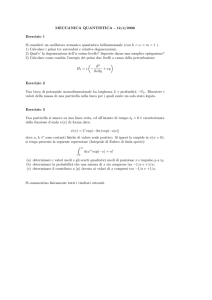
Il segnale x(t)= Asin(2f0t), viene inviato in ingresso al sistema di Figura 1 in cui B = 4f o
ed N(t) è un processo bianco con valor medio nullo e densità spettrale di potenza costante pari a
No .
Si determini il rapporto segnale/rumore in uscita dal sistema.
Quale valore si dovrebbe assegnare a B per massimizzare tale rapporto e perché?
x(t)
y=x2
H(f)
z(t)
y(t)
B
B f
N(t)
Figura 1
Esercizio2. Le variabili aleatorie X ed Y, con X uniformemente distribuita in [0, 1] ed Y
uniformemente distribuita in [-1, 1], sono indipendenti.
Si determini l’espressione analitica della funzione di distribuzione di probabilità
FX(x/A) della variabile X condizionata dall’evento A= Y 0.5.
FX(x/A)=
Esercizio3. Si consideri il processo parametrico X(t) = rectT(t-T/2 – ), in cui T è una
costante reale positiva e è una variabile aleatoria avente densità di probabilità
f(e-u
Disegnare alcune realizzazioni del processo e determinare la densità di probabilità
del primo ordine del processo.
Verificare se il processo X(t) è stazionario in media.
1° Quesito
Si definisce rapporto Segnale/Rumore in uscita da un sistema il rapporto tra la potenza del segnale
utile e la potenza del rumore.
Nel caso in esame il segnale utile è il segnale xt che dopo il quadratore si trasforma in yt quindi
si somma al rumore N t .
Poiché il rumore N t si assume incorrelato con il segnale utile, il segnale somma zt yt N t
non contiene componenti di densità spettrale di potenza mutua, cioè
S zz f S NN f S yy f
In uscita dal filtro è quindi possibile distinguere la potenza dovuta al segnale utile e quella dovuta al
rumore.
Come prima cosa consideriamo le trasformazioni che subisce il segnale utile.
Si determina il segnale yt
yt x 2 t A 2 sin 2 2f 0 t
A2 A2
cos4f 0 t
2
2
2
Lo spettro di yt è costituito da una riga nell’origine (componente continua) di ampiezza A
e da una coppia di righe alle frequenze 2 f 0 , ciascuna di ampiezza A
Y f
2
4
2
e fase .
A2
A2
f 2 f 0 f 2 f 0
f
2
4
Il filtro H f ha un nullo nell’origine e quindi elimina la componente continua. Inoltre, il filtro ha
banda B 4 f 0 e quindi lascia passare le righe in 2 f 0 . In corrispondenza di tali frequenze la
risposta del filtro vale H 2 f 0 1 . Lo spettro del segnale di uscita utile è quindi
2
Yu f
A2
f 2 f 0 f 2 f 0
8
Antitrasformando, si trova l’andamento temporale del segnale yu t , che è
A2
cos4f 0 t è periodico a potenza finita, quindi la sua potenza è data per il
4
teorema di Parseval da :
il segnale yu t
PYu YK
2
K
A2
2
8
2
A4
32
potenza del segnale utile in uscita dal sistema
Ora consideriamo il rumore N t e la sua trasformazione.
In uscita dal filtro H f otteniamo
S Nu f H f S N f
2
Hf
f
4 f0
rect 8 f 0 f
PN u
S Nu f df
PN u
8
N0 f0
3
4 f0
4 f0
Hf
;
f
2
16 f 0
f
2
2
N 0 df
2N 0
16 f 0
2
2
16 f 0
4 f0
0
2
rect 8 f 0 f
f 2 df
N0
8 f0
2
4 f 0 3
3
potenza del rumore in uscita dal sistema
A4
4
S
32 3 A
N 8 N 0 f 0 256 N 0 f 0
3
S
il filtro deve avere un valore minimo di banda pari a quella
N
del segnale utile in modo da far passare il segnale utile e filtrare il piu’ possibile il rumore in
ingresso.
1b.
Per massimizzare il rapporto
B 2 f0
2° Quesito
La probabilità PX x / Y 0.5 PX x dato la statistica indipendenza di X e Y.
Vediamo come si arriva al risultato con la funzione congiunta
FX / A x / A PX x / A PX x / Y 0.5
P X x , Y 0.5 P X x Y 0.5
PY 0.5
PY 0.5
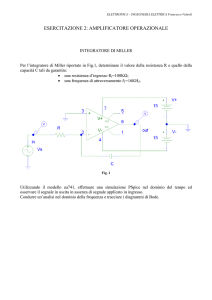
Essendo X e Y statisticamente indipendenti f XY x, y f X x f Y y
Il dominio di definizione di X e Y è illustrato in Fig. 2. L’evento Y 0.5 è rappresentato dal
dominio tratteggiato in Fig. 3, avente area 0.5
f XY x, y 0.5
Y
Y 0.5
Y
1
1
0.5
1
X
1
-1
-1
Fig. 2
Fig. 3
Essendo il dominio di (X,Y) uniforme
P E
X
misE
misD
ne segue che
1
1
PY 0.5 2
2
4
Assumendo 0<x<1, l’evento intersezione
colore scuro in Fig. 4, avente area 0.5 x
X x Y 0.5 è rappresentato dal dominio di
Y
1
0.5
x
-1
1
X
Fig. 4
Ne segue che
0
0
,x 0
0.5 x
P X x Y 0.5
,0 x 1 x
2
4
,x 1
1 4
1 4
,x 0
,0 x 1
,x 1
Dividendo per la probabilità dell’evento Y 0.5 si trova infine
0
FX / A x / A x
1
,x 0
,0 x 1
,x 1
3° Quesito
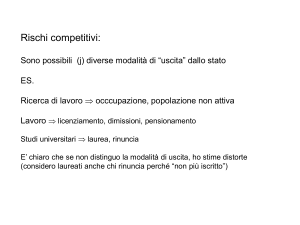
Rappresentiamo alcune realizzazioni del processo X t
X(t)
X(t)
xt , 0
T
t
xt , t1
t1
t1 T
Il processo X(t) può assumere solo i valori 0 e 1, quindi la sua densità di probabilità del I ordine è
del tipo
f X x, t p0 t x p1 t x 1
con p1 t 1 p0 t
Considerando che il ritardo aleatorio (la variabile ) non può essere piu’ piccolo di 0, si ha che
p0 t 1 ,
Per t<0
p1 t 0
X(t)
Per t>0
t
T
t
p1 t P t T P t , t T Pt T t F t F t T
dove F x è la funzione distribuzione di probabilità della variabile , che vale
F x 1 exp u
Si ottiene quindi
p1 t 1 exp t ut 1 exp t T ut T
Ricordando che t>0 si ha
p1 t 1 exp t 1 exp t T ut T
Distinguiamo infine i due casi :
0<t<T
t
p1 t 1 exp t
t>T
p1 t 1 exp t 1 exp t T exp t T exp t
exp t exp T exp t exp T 1 exp t
EX t 0 P X t 0 1 P X t 1 p1 t
il valore medio del processo dipende da t ne segue che X t non è stazionario neppure in media.