Analisi Matematica 1 e Matematica 1
Geometria Analitica: Rette
Annalisa Amadori e Benedetta Pellacci
[email protected]
[email protected]
Università di Napoli “Parthenope”
Contenuti
Nel Piano
Il piano cartesiano
Vettori e punti del piano.
Operazioni: Somma, prodotto esterno, prodotto scalare.
Distanza e modulo.
Rette nel piano
Definizione
Equazioni Parametriche e Cartesiane
Rette parallele e perpendicolari
Nello Spazio
Lo spazio vettoriale R3
Equazioni parametriche
Equazioni cartesiane di rette e piani
Introduzione
L’idea fondante della geometria analitica è quella di
poter associare a oggetti geometrici espressioni
algebriche, che quindi si possano più facilmente
manipolare.
Il primo passo per questa associazione è associare ai
punti del piano coppie di numeri reali che ne
individuino la posizione.
Introduciamo un sistema di assi cartesiani (da
Descartes (1556-1650)) ortogonali,
Ogni punto P 0 del piano viene individuato dalle sue
coordinate (x 0 , y 0 ) date dai numeri reali ottenuti dalle
proiezioni ortogonali sugli assi del punto.
Lo Spazio Vettoriale R2
R2 = {(x, y) : x ∈ R, y ∈ R}.
Un elemento P = (x, y) di R2 sono è un punto P del piano
di coordinate x e y . Inoltre, R2 è uno spazio vettoriale e i
suoi punti (x, y) sono identificati con i vettori v = (x, y)
che partono dall’origine degli assi e terminano in (x, y).
y
y
6
6
6
2
r
1
r (3,6)
(1,2)
v
-
x
3
-
x
Operazioni in R2: Somma
Definizione: Dati v = (x 1 , y 1 ), w = (x 2 , y 2 ), la
somma tra v e w è il vettore
z = v + w = (x 1 + x 2 , y 1 + y 2 ).
Elemento Neutro: L’elemento neutro per la
somma è il vettore nullo 0 = (0, 0) che altro non è che
l’origine degli assi. L’opposto di un vettore v = (x, y)
è il vettore w = −v = (−x, −y).
Opposto: L’opposto di un vettore v = (x, y) è il
vettore w = −v = (−x, −y).
Operazioni in R2: Prodotti
Prodotto esterno. Dati v = (x, y) e α ∈ R, il loro
prodotto esterno è dato dal vettore
z = αv = (αx, αy).
Prodotto scalare. Dati v = (x 1 , y 1 ), w = (x 2 , y 2 ), il
prodotto scalare tra v e w è dato da
z = v · w = (x 1 x 2 , y 1 y 2 ).
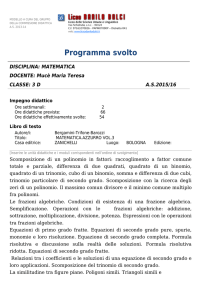
R2 NON È Ordinato!!
Al contrario di quanto accade in R,
in R2 non c’è una relazione d’ordine,
cioè dati due punti di R2
NON si può stabilire quale tra i due è più grande.
y
6
v = (1, 2) w = (2, 1)
(1,2)
r
v r(2,1)
1 *
w
2
1
2
v ≥ w oppure v ≤ w?
-
x
Distanza in R2
Dati P = (x p , y p ), Q = (x q , y q ) punti di R2 definiamo la
distanza tra P e Q il numero reale positivo
q
d (P,Q) = (x p − x q )2 + (y p − y q )2 ,
Proprietà :
d (P,Q) ≥ 0, d (P,Q) = 0 ⇔ P = Q ;
2
d (P,Q) = d (Q, P );
3
d (P,Q) ≤ d (P, R) + d (Q, R), R = (x r , y r ) in R2 .
Esempio: Dati P = (−3, 4), Q = (2, −1), la distanza è
1
data da
p
p
p
p
d (P,Q) = (−3 − 2)2 + (4 − (−1))2 = 25 + 25 = 50 = 5 2
Distanza e Modulo
La distanza di un punto P = (x p , y p ) dall’origine
d (P, 0) =
q
x p2 + y p2
corrisponde al modulo del vettore associato a P ;
Quindi la nozione di distanza concorda con quella che
conosciamo in R, dove la distanza da un punto
dall’origine è esattamente il suo modulo.
Il modulo di un vettore corrisponde alla sua
lunghezza ed è anche detto anche norma del
vettore.
Luoghi Geometrici
Un luogo geometrico è l’insieme dei punti che
verificano una certa proprietà;
l’esempio più semplice di luogo geometrico sono le
rette.
Sono luoghi geometrici: l’ellissi, le circonferenze, i
piani, i coni...
Rette: Equazioni Parametriche
Definizione
Dato un punto P 0 = (x 0 , y 0 ) e una direzione
v = (p, q) 6= (0, 0), la retta passante per P 0 e con vettore
direzione v è il luogo dei punti P = (x, y) tali per cui il
vettore P P 0 sia parallelo a v ,
Cioè
r = {P ∈ R2 : P P 0 = t v, t ∈ R}
Poiché il vettore P P 0 ha componenti (x − x 0 , y − y 0 ),
otteniamo
(
x − x0 = t p
y − y0 = t q
queste sono le equazioni parametriche della retta
passante per P 0 e con direzione v . t è il parametro.
Rette: Equazioni Parametriche
Abbiamo ottenuto le equazioni parametriche di r
(
x − x0 = t p
y − y0 = t q
o anche (x(t ), y(t )) = (x 0 + t p, y 0 + t q)
Ricordate che P 0 = (x 0 , y 0 ) e v = (p, q) sono dati e al
variare di t ∈ R troviamo tutti i punti della retta.
Esempio
Dato P 0 = (2, 1) e v = (−1, 3), otteniamo la retta r di
equazioni parametriche (x(t ), y(t )) = (2 − t , 1 + 3t ). Il
punto P = (0, 0) non appartiene alla retta perché non esiste
t ∈ R per cui 2 − t = 0 e 1 + 3t = 0. Mentre Q = (0, 7) ∈ r .
Equazioni Parametriche degli Assi
Le equazioni parametriche dell’asse delle ascisse sono
quelle della retta passante per P 0 = (0, 0) e con
direzione v = (1, 0)
(
x = t,
y = 0.
Le equazioni parametriche dell’asse delle ordinate
sono quelle della retta passante per P 0 = (0, 0) e con
direzione v = (0, 1)
(
x =0
y = t.
Verso l’equazione cartesiana
Visto che (p, q) 6= (0, 0) possiamo supporre che sia ad
esempio p 6= 0 e troviamo
x − x0
t =
p
x − x0
y = y0 +
q
p
la seconda equazione si può anche scrivere
ax + b y + c = 0
con a = q, b = −p e c = y 0 p − x 0 q . Questa è detta
equazione cartesiana implicita della retta.
Osservazioni ed Esempi
Diremo che un punto P di coordinate (x, y)
appartiene alla retta r se le sue coordinate soddisfano
l’equazione, ad esempio data la retta r di equazione
2x − 3y + 6 = 0 il punto P = (0, 2) appartiene alla
retta, poiché 2 · 0 − 3 · 2 + 6 = 0, mentre il punto
Q = (1, 2) non vi appartiene in quanto
2 · 1 − 3 · 2 + 6 = 2 6= 0!
L’asse delle ascisse e l’asse delle ordinate hanno
equazioni rispettivamente
y = 0,
x = 0.
Perpendicolarità
L’equazione di una retta può anche essere data
usando il concetto di perpendicolarità invece di quello
di parallelismo, infatti dato un punto P 0 = (x 0 , y 0 ) e
un vettore v = (a, b) esiste una e una sola retta
passante per P 0 e perpendicolare a v .
Questa sarà il luogo dei punti P = (x, y) per cui il
prodotto scalare tra il vettore P − P 0 e v sia nullo,
cioè
P − P0 · v = 0
ovvero (x − x 0 )a + (y − y 0 )b = 0
posto c = −(ax 0 + b y 0 ) otteniamo di nuovo
l’equazione cartesiana di una retta se almeno uno tra
a e b è non nullo;
Equazione Esplicita
Prendiamo l’equazione cartesiana implicita
ax + b y + c = 0
con a = q, b = −p e c = y 0 p − x 0 q . se b 6= 0 possiamo
dividere per b e ottenere
y = mx + q̃
con m = −a/b = q/p, q̃ = −c/b = (p y 0 − x 0 q)/p,
che si chiama forma canonica o equazione
esplicita della retta.
Il numero m si dice coefficiente angolare della retta e
ci da informazioni sulla pendenza della retta;
q̃ si dice termine noto.
Retta per due punti
Dati P 0 = (x 0 , y 0 ) e P 1 = (x 1 , y 1 ), un generico punto
P = (x, y) apparterrà alla retta in cui si trovano P 0 e
P 1 se il vettore P P 0 è parallelo al vettore P 0 P 1
Poiché P P 0 = (x − x 0 , y − y 0 ) e
P 0 P 1 = (x 1 − x 0 , y 1 − y 0 ), otteniamo le equazioni
parametriche
(
x − x 0 = t (x 1 − x 0 )
y − y 0 = t (y 1 − y 0 )
Retta per due punti: seguito
(
x − x 0 = t (x 1 − x 0 )
y − y 0 = t (y 1 − y 0 )
Se y 1 − y 0 6= 0 (altrimenti deve essere diverso da zero
x 1 − x 0 e si può ragionare in modo analogo) si ottiene
x − x0 =
y − y0
(x 1 − x 0 ).
y1 − y0
che porta alla nota formula
x − x0
y − y0
=
.
x1 − x0 y 1 − y 0
Che da l’equazione cartesiana della retta
passante per due punti dati.
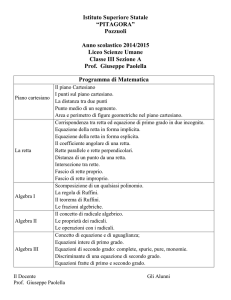
Come si disegna una retta?
Per disegnare una retta basta trovare due punti P e Q che
vi appartengono e tracciare la linea passante per essi.
Ad esempio per disegnare y + 3x − 1 = 0, poniamo x = 0
ottenendo y = 1, poi x = 1 ottenendo y = −2, quindi
poniamo nel piano cartesiano P = (0, 1), e Q = (1, −2) e
tracciamo la linea passante per P e Q .
y
6
B
B
B
1B P
r
B
B
-2
B 1
B
B
B rQ
-
x
Rette Parallele
Due rette r , r 0 di equazioni
a0x + b0 y + c 0 = 0
ax + b y + c = 0,
sono parallele se le rispettive direzioni sono proporzionali
e poiché le direzioni sono date da (−b, a) e (−b 0 , a 0 ), deve
esistere un numero α tale che
−b = −αb 0
a = αa 0
e
poiché almeno uno tra b 0 e a 0 è diverso da zero possiamo
scrivere ad esempio che
b0
a
=− 0
a = b/b a cioè ab = a b ovvero
b
a
0
0
0
Ricordando che m = −a/b e m = −a /b , otteniamo che
0 0
0
0
due rette parallele hanno stesso coefficiente
Rette parallele agli assi
• L’asse delle x ha equazione y = 0 ed il coefficiente
angolare è m = 0. Quindi le rette parallele all’asse x
hanno m = 0 da cui l’equazione
c
retta parallela all’asse x.
y =−
b
• L’asse y ha equazione x = 0, quindi il suo vettore
direzione è v = (0, 1). Se una retta è parallela all’asse y
deve avere vettore direzione v 0 = (−b 0 , a 0 ) = (0, a) e dunque
c
retta parallela all’asse y.
x =−
a
y 6
y =K
x =h
-
x
Rette Perpendicolari
Due rette r , r 0 di equazioni
ax + b y + c = 0, a 0 x + b 0 y + c 0 = 0
sono perpendicolari se sono perpendicolari i loro
vettori direzione per cui deve essere
0
0
(−b, a) · (−b , a ) = 0
⇔
b0
a
= − 0.
b
a
Ricordando che m = −a/b e m 0 = −a 0 /b 0 , otteniamo
che i coefficienti angolari di due rette
perpendicolari soddisfano m = −1/m 0 .
Osservazioni Finali ed Esempi
Già in queste prime osservazioni si vede come le varie
proprietà geometriche si traducono in condizioni
algebriche.
Le rette sono rappresentate algebricamente da
polinomi di grado uno, e nello studio delle proprietà
geometriche delle rette usiamo tutti gli strumenti noti
nell’algebra dei polinomi.
Se una retta r ha equazione ax + b y + c = 0, con
c = 0 allora tale retta passerà per l’origine.
Le rette y = x ( y = −x ) si dicono bisettrici del primo
e terzo quadrante, (bisettrici del secondo e quarto
quadrante) perché dividono questi quadranti a metà.
Lo Spazio
Lo spazio in cui viviamo è costituito da tre dimensioni:
lunghezza, larghezza (o profondità ) e altezza.
Algebricamente lo definiamo come lo spazio vettoriale
(vedi dispense di algebra lineare)
©
ª
R3 := (x, y, z) : x, y, z ∈ R
mentre lo rappresentiamo geometricamente grazie a tre
assi cartesiani
6
y
-
x
z
Equazioni Parametriche
La definizione del luogo geometrico retta non cambia
quando passiamo dal piano allo spazio, quello che cambia
sono le coordinate di un punto e le componenti del vettore
direzione, che invece di essere due (come nel piano) sono
tre. Pertanto, dato un punto P 0 = (x 0 , y 0 , z 0 ) e un vettore
v = (p, q, r ) la retta passante per P 0 di direzione v è il
luogo
©
ª
r = P ∈ R3 : P P 0 = t v, t ∈ R
ed ha equazioni parametriche
x = x 0 + t p
y = y0 + t q
z = z + t r
0
Parallelismo e Perpendicolarità
Due rette di equazioni parametriche
x = x 0 + t p 0
x = x 1 + t p 1
0
1
y = y 0 + t q0
z = z + t r
0
y = y 1 + t q1
z = z + t r
1
sono parallele se i due vettori direzioni sono
proporzionali, cioè esiste α ∈ R tale che
(p 0 , q 0 , r 0 ) = α(p 1 , q 1 , r 1 );
sono perpendicolari se i due vettori direzione sono
perpendicolari, ovvero il loro prodotto scalare è nullo,
cioè p 0 p 1 + q0 q1 + r 0 r 1 = 0.
Equazioni Parametriche di un piano
Un piano π è individuato da due vettori v, w linearmente
indipendenti e da un punto P 0 = (x 0 , y 0 , z 0 ), ogni altro
punto P di R3 appartiene a π se il vettore P P 0 può essere
ottenuto come combinazione lineare dei vettori v, w ,
quindi
π = {P P 0 = t v + sw, t , s ∈ R}
se v = (v 1 , v 2 , v 3 ) e w = (w 1 , w 2 , w 3 ) otteniamo le
equazioni parametriche di π
x = x 0 + t v 1 + sw 1
y = y 0 + t v 2 + sw 2
z = z + t v + sw
0
3
3
Equazione Cartesiana di un piano:
Prodotto Vettoriale tra vettori
Il prodotto vettoriale di due vettori v = (v 1 , v 2 , v 3 ),
w = (w 1 , w 2 , w 3 ), v ∧ w è dato dal vettore le cui
componenti sono
v ∧ w = (v 2 w 3 − w 2 v 3 , v 3 w 1 − w 3 v 1 , v 1 w 2 − w 1 v 2 )
v ∧ w è un vettore ortogonale sia a v che a w .
Visto che un piano π è generato da v, w linearmente
indipendenti, un altro modo per dire che un punto
appartiene a π è affermare che il vettore P P 0 è
ortogonale al prodotto vettoriale v ∧ w .
Equazione Cartesiana di un piano:
Quindi il prodotto scalare tra il vettore
P P 0 = (x − x 0 , y − y 0 , z − z 0 ) e il vettore v ∧ w deve
essere nullo;
Usando la notazione v ∧ w = (a, b, c), dobbiamo
imporre
(x − x 0 , y − y 0 , z − z 0 ) · (a, b, c) = 0
questo ci porta all’equazione cartesiana del piano π
(fate i conti!)
ax + b y + c z + d = 0,
d = −ax 0 − b y 0 − cz 0
Dove ricordiamo che a, b, c sono le componenti di un
vettore ortogonale al piano π.
Equazioni Cartesiane di una retta
Una retta è determinata dall’intersezione di due piani,
quindi dai punti soluzioni del sistema di due equazioni
in tre incognite
(
a1 x + b1 y + c1 z + d1 = 0
a2 x + b2 y + c2 z + d2 = 0
Consideriamo i ranghi delle matrici
µ
A=
a1 b1 c1
a2 b2 c2
¶
µ
C=
a1 b1 c1 d1
a 2 b 2 c 2 d 12
¶
Dal Teorema di Rouché-Capelli otteniamo le seguenti
conclusioni:
Equazioni Cartesiane di una retta
µ
A=
a1 b1 c1
a2 b2 c2
¶
µ
C=
a1 b1 c1 d1
a 2 b 2 c 2 d 12
¶
rg A = 1 rg C = 2 allora il sistema non ha soluzioni, il
che vuol dire che i due piani sono paralleli ma non
coincidenti.
rg A = 1 = rg C = 1 allora il sistema ha infinite
soluzioni dipendenti da due parametri, il che vuol dire
che i due piani sono paralleli e coincidenti.
rg A = 2 = rg C = 2 allora il sistema ha infinite
soluzioni dipendenti da un solo parametro, il che vuol
dire che i due piani non sono paralleli e si intersecano
in una retta.