Capitolo
6
Forza centripeta e
gravitazione
1. Il moto circolare
Quali sono le caratteristiche del moto circolare?
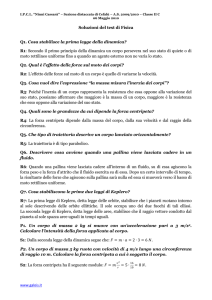
Una particella si dice animata di moto circolare quando la sua traiettoria è una
circonferenza. Lo studio di questo tipo di moto viene effettuato individuando
due direzioni istantanee, cioè due rette orientate che cambiano ad ogni nuova
lettura di cronometro. Si tratta della direzione radiale, lungo la semiretta che
esce dal centro della circonferenza andando verso la posizione del punto che si
sta muovendo; e della direzione tangenziale, sulla retta tangente alla
circonferenza, orientata nel verso del moto e perpendicolare alla direzione
radiale.
Quali sono direzione e verso della velocità nel moto circolare?
Quando una particella descrive una traiettoria curva, ed una circonferenza in
particolare, per capire la direzione della velocità possiamo immaginare che
d’improvviso scompaiano tutte le forze in azione. La particella si troverebbe
allora nella condizione contemplata dalla legge d’inerzia, la quale prevede che
in assenza di forze il moto segua una linea retta. Si tratta della retta tangente
alla traiettoria, che per definizione viene assunta come direzione della velocità
in quel dato istante.
Che cosa sappiamo di sbagliato riguardo al moto circolare?
Prima di iniziare l’analisi del moto circolare, è necessario rimuovere due idee
errate che nei secoli si sono radicate, e che costituiscono un ostacolo alla
comprensione di questo fenomeno.
1
DIREZIONE
TANGENZIALE
ISTANTANEA
DIREZIONE
RADIALE
ISTANTANEA
v
v
prima idea errata: un oggetto può seguire una traiettoria circolare senza che vi
sia un ” binario” di qualche tipo che lo costringa a farlo.
seconda idea errata: un oggetto in moto circolare tende ad essere scagliato verso
l’esterno, in direzione radiale, dall’azione di una forza detta “centrifuga”.
Perché occorre un “binario” per sostenere il moto circolare?
La prima delle due concezioni errate risale agli antichi Greci, i quali ritenevano
il moto circolare la traiettoria perfetta, perché pensavano fosse seguita dagli
oggetti celesti. Essendo perfetta, la traiettoria circolare doveva essere una
condizione naturale per i corpi, “incorruttibile”, cioè capace di sostenersi
autonomamente ed immutabile nel tempo. Da Galileo in poi sappiamo che
questo ruolo “privilegiato” spetta al moto rettilineo uniforme, il solo a
proseguire indefinitamente senza che debba intervenire alcuna forza, e che per
tale caratteristica viene addirittura considerato uno stato.
Viceversa, muoversi lungo una traiettoria curva significa cambiare in ogni
momento la direzione della velocità. Mutare velocità, anche se solo in direzione
e non in intensità, vuol dire accelerare: una macchina che curvi con velocità di
modulo costate v 30 Km/h , sta accelerando in direzione, anche se il
v
N
N
v
v
v
DIREZIONE
RADIALE
ISTANTANEA
tachimetro segna sempre lo stesso valore perché non sta accelerando in intensità.
Poiché il secondo principio prevede che possa aver luogo un’accelerazione
unicamente in presenza di una forza, ne deduciamo che nel moto circolare
occorre una forza anche solo per cambiare ogni istante la direzione alla velocità.
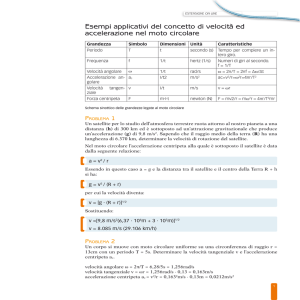
Come vedremo nel dettaglio, si tratta di una forza in direzione radiale, che
punta sempre verso il centro della circonferenza: ne sono esempi la forza
normale esercitata da un binario curvo, oppure la tensione di una corda legata
al centro della circonferenza. Nella figura a lato, là dove il binario (in un piano
orizzontale) si interrompe, la pallina prosegue con un moto in linea retta lungo
la direzione tangenziale istantanea, dato che è venuta meno la forza normale
che la costringeva a curvare.
Perché non esiste una “forza centrifuga”?
Come sappiamo dalla terza legge della dinamica, non esistono forze solitarie, ma
soltanto interazioni fra coppie di oggetti. Ogni forza deve avere due “attori”: un
soggetto che la esercita (e che a sua volta subisce un’azione uguale e contraria), ed
uno che la subisce. Ora, è nota a tutti la sensazione (illusoria) di essere scagliati verso
l’esterno, in direzione radiale, quando la nostra auto percorre un arco di curva. Ma
si deve escludere che questa sensazione sia dovuta all’azione di una forza,
semplicemente perché non esiste alcun soggetto che esercita questa forza. Chi esercita la
“forza centrifuga”? Non c’è risposta a questa domanda.
Un passeggero su di un’auto in curva crede di essere tirato verso l’esterno, ma in
realtà mantiene soltanto la stessa direzione di velocità, che come abbiamo detto
è in ogni istante tangente alla traiettoria circolare.
Se non ci fosse l’auto egli volerebbe in direzione tangenziale non appena inizia la
curva. Nel frattempo invece, la macchina gli si muove sotto ed intercetta
continuamente la sua traiettoria rettilinea forzandolo verso il centro. Come si vede in
figura, lo spostamento dell’auto crea una valutazione errata, per cui egli pensa di
2
essere scagliato verso l’esterno, ed invece non sta seguendo affatto la direzione
radiale istantanea. Il meccanismo è lo stesso di quando l’auto frena, ed il passeggero
prosegue il moto in avanti con la medesima velocità di prima della frenata.
Analogamente, quando l’auto accelera, al passeggero sembra di essere tirato
indietro, ma sta solo proseguendo con la velocità che possedeva prima, mentre è
l’auto ad aver cambiato stato di moto. Questa tendenza a proseguire il moto in
direzione tangenziale è responsabile fra le altre cose, del rigonfiamento della
circonferenza del nostro pianeta all’altezza dell’equatore, dove la velocità di
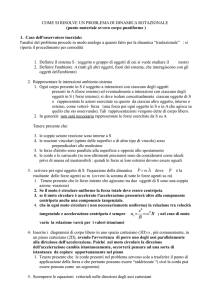
rotazione è massima. Analogamente è il principio usato dalla “centrifuga” di una
lavatrice per asciugare i panni. Come si vede dal disegno però, le goccioline di acqua
non scappano in direzione radiale ma tangenziale, mentre il cestello continua a
ruotare.
goccia
E’ necessario che agisca una forza anche lungo la direzione istantanea della velocità?
Immaginiamo la pallina di una roulette lanciata dal croupier. Inizialmente la
pallina stava ferma, quindi la mano del croupier ha dovuto esercitare una forza
per portarla fino ad avere velocità v . Come sappiamo dalla seconda legge
della dinamica, da quel momento in poi, in assenza di qualsiasi attrito, non è
più necessaria una forza nella direzione istantanea di v per mantenere la sua
intensità v costante. D’altro canto non possiamo nemmeno escludere che una
F?
F
tale forza ci sia: ad esempio quando un’auto percorre una curva può farlo con
velocità di modulo costante, ma anche accelerando in intensità. Allo stesso
modo, quando tentiamo di produrre con la mano il moto circolare in un peso
agganciato ad una corda, dobbiamo prima metterlo in moto, esercitando una
forza nella direzione della velocità. Successivamente compiamo due azioni:
mantenendo ferma la mano tiriamo la corda in modo da costringere il peso a
descrivere la circonferenza, ed ogni tanto dovremo pure dare un colpetto nella
direzione della velocità per compensare l’azione degli attriti e della gravità, che
tendono a far diminuire l’intensità della velocità da noi inizialmente impressa.
Nel seguito ci occuperemo della cinematica del moto circolare in cui l’intensità
della velocità rimane costante, che chiameremo moto circolare uniforme. Nel
moto circolare uniforme, ad essere costante è dunque solo v , mentre v
vA
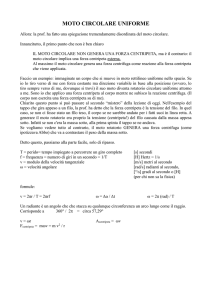
Come possiamo ricavare l’accelerazione lungo la direzione radiale?
Preso un punto in moto circolare uniforme di raggio r , consideriamo un arco
di circonferenza AB, e l’intervallo di tempo t che occorre al punto per
percorrerlo. In questo stesso tempo il raggio della circonferenza avrà
“spazzato” l’angolo e la velocità avrà cambiato direzione passando da vA a
vB . Poiché sia vA che vB sono perpendicolari al raggio, se li riportiamo con
un’origine comune, è immediato concludere che anche la velocità ha spazzato
lo stesso angolo . Dal metodo di punta-coda per la somma dei vettori si
riconosce subito che il vettore v che unisce le punte di vA e vB è il vettore
differenza, cioè vA v vB da cui v vB vA .
Consideriamo ora il triangolo delle velocità ed il triangolo AOB: sono entrambi
isosceli e con un angolo uguale, pertanto sono simili:
3
A
s
B
cambia ogni istante direzione.
v
r
vB
O
v
vA
vB
v
s
r
v
0
v
v A 90°
Dividiamo per t ambo i membri e riordiniamo:
vB
v
t
v
aC
v
r
s
t
Quando tende a zero l’intervallo temporale t , sappiamo che il rapporto
diviene il modulo della velocità istantanea v . Il rapporto
v
t
s
t
diventa invece
il modulo dell’accelerazione istantanea, la cui direzione si mantiene sempre
parallela a v e così alla fine risulta perpendicolare a v . Infatti nel triangolo
delle velocità, quando 0 si ha 90 dovendo la somma rimanere
uguale a 180 . La chiamiamo quindi accelerazione centripeta aC , in quanto
diretta lungo il raggio puntando verso il centro. Quindi sostituendo nella
v
s
relazione precedente t con aC e t con v si trova che l’intensità
dell’accelerazione centripeta vale:
2
v
aC
r
Esempio 1
Sopra ad un piano orizzontale, una pallina di massa m 0.0500 Kg viene
N
r
lanciata in una guida circolare di raggio r 0.200 m e percorre un giro
v
aC
N
costante durante il giro, calcolare l’accelerazione centripeta della pallina e la
forza normale esercitata su di lei dalla guida.
Troviamo innanzitutto il modulo della velocità:
2r
6.28 0.200
v
0.866 m/s
1.45 s
1.45
y
v
1.45 s . Assumendo che il modulo della velocità sia rimasto
completo in
x
Fissiamo quindi un riferimento sul piano con l’origine nel centro della
circonferenza e consideriamo l’istante in cui la pallina taglia l’asse delle ascisse
come in figura. In direzione orizzontale agisce la forza normale, mentre
2
l’accelerazione vale a ( v /r ; 0 ) :
N x max
Nx m
2
v
0.0500
r
e per l’accelerazione centripeta si ha:
2
v
0.8662
aC
3.75 m/s2
r
0.200
4
0.8662
0.187 N
0.200
Cosa si intende con il termine “forza centripeta” ?
Se una particella di massa m segue un moto circolare uniforme di raggio r
lungo la direzione radiale istantanea la seconda legge della dinamica si scrive:
F
r
m
,
2
v
r
Si chiama forza centripeta la somma delle componenti in direzione radiale
F
r
di tutte le forze che agiscono su di una particella in moto circolare.
Non si tratta quindi di un nuovo tipo di forza, ma solo del nome che sinteticamente
si assegna alla risultante delle forze che producono l’accelerazione centripeta.
Nel precedente esempio 1 la forza centripeta è fornita dalla normale alla guida,
in questo caso l’unica ad agire sulla pallina in direzione radiale.
Riflettiamo sul fatto che la forza normale è una forza passiva, che è in grado di
fornire sempre il valore che occorre per costringere l’oggetto a percorrere la
traiettoria circolare di quel raggio con quella velocità. Se ad esempio il modulo
della velocità raddoppiasse, la guida dovrebbe fornire una forza centripeta
|v|2
(2|v |)2
m
4 m quattro volte più grande, e così via finché la forza richiesta
r
r
non divenisse così intensa da piegare la guida stessa. E’ quanto accade ai treni
che deragliano per aver tentato di percorrere le curve a velocità superiore al
massimo che il binario poteva sopportare senza deformarsi. La forza centripeta
può avere le origini più diverse: la tensione di una corda insieme alla gravità
producono la forza centripeta quando si fa ruotare una massa ad un suo capo,
l’attrito statico fra pneumatici ed asfalto fornisce la forza centripeta che serve
per far percorrere all’auto una curva, la forza di gravità funge da forza
centripeta per tenere la Luna in orbita attorno alla Terra, e così via.
Esempio 2
Una massa m 0.600 Kg agganciata al capo di una fune lunga 0.500 m viene
y
fatta ruotare in un piano verticale, imprimendogli nel punto più in basso una
velocità v 5.00 m/s . La traiettoria è circolare ma il modulo della velocità non
T
rimane costante in quanto la massa è rallentata dalla gravità mentre sale ed è
accelerata mentre scende. Sapendo che nel punto più in
alto risulta
v 2.32 m/s , si calcolino la forza centripeta, l’accelerazione centripeta e la
W
tensione della fune nelle posizioni di massima e minima altezza.
Nella posizione di minima altezza abbiamo, lungo l’asse y (che in quel
momento coincide con la direzione radiale):
| v |2
Ty Wy may T mg m
r
2
|v |
5.002
T mg m
0.600 9.81 0.600
35.9 N
r
0.500
mentre la forza centripeta e l’accelerazione centripeta valgono:
5
y
W
T
T mg 35.9 0.600 9.81 30.0 N
| v |2
5.002
aC
50.0 m/s2
ay 50.0 m/s2
r
0.500
Nel punto di massima altezza abbiamo, sempre lungo la direzione radiale y :
| v |2
Ty Wy may T mg m
r
2
2
|v |
2.32
T m
mg 0.600
0.600 9.81 0.573 N
r
0.500
mentre la forza centripeta e l’accelerazione centripeta valgono:
Fr T mg 0.573 0.600 9.81 6.46 N
| v |2
2.322
aC
10.8 m/s2
ay 10.8 m/s2
r
0.500
Riflettiamo sul fatto che la tensione della corda non coincide con la forza
centripeta, ma anzi T aggiusta il suo valore facendosi minima quando è
F
r
aiutata dalla gravità nel produrre la forza centripeta, come accade nel punto più
alto, e facendosi invece massima quando è contrastata dalla gravità nel
produrre la forza centripeta, come accade nel punto più basso.
Esempio 3
Un’auto segue una strada curva procedendo a velocità di modulo costante v .
A
Si calcoli il modulo della sua accelerazione nei tratti AB, BC, CD, DE
specificando dove è massimo e dove minimo.
R
Lungo i tratti AB, CD, DE, che sono archi di circonferenza, l’accelerazione è
solo centripeta essendo il modulo della velocità costante. Si ha:
2
2
2
2
2
v
v
v
v
4 v
aAB
;
aCD
;
aDE
3
3R
1R
R
3 R
R
B
C
3
4
R
4
D
1
3
y
3
mentre nel tratto rettilineo BC essendo costante il modulo della velocità si ha:
aBC 0
R
Il massimo valore di accelerazione, tutta centripeta, si ha quindi durante la
curva di raggio minimo DE, il minimo valore di accelerazione centripeta nella
curva di raggio massimo AB, mentre il minimo valore di accelerazione in
assoluto è il valore nullo che si ha nel tratto rettilineo BC.
E
Esempio 4
Un’automobile di massa m 1500 Kg percorre una curva circolare di raggio
N
r 40.0 m alla velocità di 15.0 m/s . Si trovi quanto vale la forza centripeta.
fs
x
Sapendo poi che il coefficiente di attrito statico fra pneumatici ed asfalto è
s 0.950 , si calcoli la massima velocità alla quale l’auto può percorrere la
curva e la forza centripeta in questo secondo caso.
W
6
La forza centripeta è fornita tutta dalla forza di attrito statico fs , e la sua
direzione è perpendicolare a quella in cui avanzano le ruote. Nel primo caso fs
non raggiunge il suo valore massimo, ma sappiamo però che la sua intensità
soddisfa la condizione 0 fs s N . Indicando con x la direzione radiale
istantanea come in figura, si ha:
2
v
15.02
fsx max fs m
1500
0.844 104 N
r
40.0
Per avere la velocità massima dobbiamo calcolare invece proprio la massima
forza di attrito statico s N e quindi trovare N . Dall’equilibrio in direzione
verticale si ha:
N y Wy 0
N mg 0
N mg
che sostituito nella relazione precedente:
2
2
v
v
fsx max max s N m
s m g m
r
r
v s gr 0.950 9.81 40.0 19.3 m/s .
In questo caso per la forza centripeta risulta
2
v
19.32
Fr m
1500
1.40 104 N .
r
40.0
N
Esempio 5
Un’automobile di massa m 1300 Kg , che viaggia alla velocità costante di
v 10.5 m/s , passa sopra ad un dosso il cui profilo può essere considerato
y
W
R
una circonferenza di raggio R 15.0 m . Si dica, senza svolgere alcun calcolo,
se quando l’auto raggiunge la sommità, la forza normale esercitata dal terreno è
maggiore, minore od uguale al peso della vettura. Si calcolino quindi le
intensità della forza centripeta e della forza normale in quel momento.
Quando si trova nel punto più alto l’auto sta descrivendo una circonferenza,
quindi deve agire su di lei una forza verticale che punta verso il centro. Questo
significa che la somma delle forze che agiscono in verticale deve puntare in
basso, cioè la forza N deve avere un’intensità minore di quella del peso W . E’
ben nota infatti la sensazione di “alleggerimento” che da passeggeri si
sperimenta sulla sommità dei dossi: quello che si percepisce è proprio la
diminuzione della forza normale, che come sappiamo, invece, quando siamo in
quiete resta sempre uguale al peso.
La forza centripeta è il risultato delle azioni congiunte di N e W , che in
verticale si sottraggono. Osservando la direzione dell’asse verticale si ha
ay
2
v
R
, da cui si ricava per la forza centripeta:
7
N
W
N
W
N
W
2
v
10.52
N y Wy may
Fr N mg m
1300
9.56 103 N
R
15.0
mentre per la normale:
N mg 9.56 103 N N 1300 9.81 9.56 103 3.20 103 N
Esempio 6
Una pallina di massa m 0.300 Kg , appesa ad un filo lungo L 0.750 m , gira
a velocità di modulo costante descrivendo una circonferenza, mentre l’angolo
che il filo forma con la verticale rimane sempre 25.0 . Sapendo che la
pallina compie un giro in 1.50 s si trovi la tensione del filo, l’intensità della
L
forza centripeta e l’intensità dell’accelerazione centripeta.
Calcoliamo innanzitutto il raggio della traiettoria circolare:
R L sin 0.750 sin 25.0 0.317 m
R
e ricaviamo da questo il modulo della velocità della pallina:
2R
6.28 0.317
v
1.33 m/s
1.50 s
1.50
T
Forza centripeta
W
e l’intensità dell’accelerazione centripeta:
2
v
1.332
aC
5.58 m/s2
R
0.317
Fissato un riferimento nell’istante rappresentato in figura, sappiamo che in
direzione verticale non c’è accelerazione, poiché se l’angolo rimane costante,
la pallina non può né salire né scendere. Si ottiene:
Ty Wy may T cos 25.0 mg 0
T
mg
0.300 9.81
3.25 N
cos 25.0
0.906
La forza centripeta è data dalla componente orizzontale della tensione, e
coincide anche con la composizione data dalla regola del parallelogramma della
tensione e del peso, poiché la risultante di queste due forze, come abbiamo
detto, è tutta orizzontale:
Fr T sin 25.0 3.25 0.423 1.37 N
y
x
Esempio 7
Sopra ad un piano, fissata ad una corda, una massa m 0.450 Kg descrive un
moto circolare uniforme di raggio r 0.500 m con velocità v 2.50 m/s .
m
All’altro capo della corda pende immobile, da un foro ricavato al centro del
piano, una seconda massa M . Si trovi il valore di M .
M
Fissato un riferimento con la direzione radiale istantanea lungo l’asse x ,
abbiamo che la forza centripeta è fornita dalla tensione della corda:
8
y
2
v
2.502
Tx max T m
0.450
5.63 N
r
0.500
Per la massa appesa, la condizione di equilibrio richiede che lungo l’asse
verticale sia nulla l’accelerazione:
Ty Wy may T Mg 0 Mg T 5.63 N
m
T
x
da cui si ottiene:
T
5.63
M
0.574 Kg
g
9.81
T
M
W
Esempio 8
Una blocco di massa m , scivola senza attrito lungo il profilo di un igloo a forma
di sfera avente raggio R , partendo dal punto più alto con una velocità
orizzontale così piccola da potersi considerare nulla. Ad un certo valore
dell’angolo il blocco si stacca dall’igloo, descrivendo una traiettoria
parabolica di caduta libera. Spiegare perché si distacca e calcolare quanto vale la
velocità in quell’istante.
Fintanto che il blocco segue il profilo dell’igloo sta descrivendo una traiettoria
circolare, e quindi occorre che le forze agenti su di lui, normale N e peso W ,
producano la forza centripeta necessaria. La normale N come sappiamo è una
forza passiva, che adegua man mano la sua intensità in conseguenza della
forza con la quale il blocco viene premuto contro l’igloo. Se l’igloo non ci fosse,
il blocco seguirebbe sin dall’inizio una traiettoria parabolica di caduta libera,
che si troverebbe nello spazio occupato dal ghiaccio. A mano a mano che
procede la discesa, questa traiettoria ipotetica si va aprendo sempre più perché
aumenta l’intensità della velocità con cui la caduta libera avrebbe inizio.
Nell’istante in cui la parabola diventa tutta esterna all’igloo, il blocco non viene
più premuto contro il ghiaccio e così si stacca. In quel momento, dato che cessa
di essere premuto, si annulla anche la forza normale.
Scegliendo un riferimento come in figura, osserviamo che il modulo della
velocità non è uniforme, ma cresce durante la caduta per l’azione della gravità.
Il blocco seguirà il profilo circolare dell’igloo solo fino a quando la somma delle
forze radiali
F
r
Fr riuscirà a produrre la necessaria forza centripeta m
N mg cos m
v Rg cos
R
:
2
v
R
N
N
N= 0
direzione radiale
y
istantanea
N
y
R c os
W
x
Imponendo la condizione trovata sopra, per cui
momento del distacco, si trova la velocità:
mg cos m
2
v
2
v
R
9
la normale si annulla al
Esempio 9
Un’automobile di massa m tenta di eseguire il “giro della morte” lungo una
pista circolare di raggio R . Si trovi la velocità minima va con la quale deve
R
v0
arrivare nel punto più alto della pista.
Per poter eseguire il giro le ruote dell’auto devono mantenere sempre il
contatto con la pista, in particolare nel punto più alto. Questo avviene solo se in
ogni momento la velocità istantanea che la traiettoria di caduta libera che tende
a far descrivere all’auto ha la parte iniziale esterna alla pista, come nella curva
blu in figura. In tal modo la pista deve esercitare una forza normale per
costringere l’auto a deviare verso il centro, ed il contatto è assicurato. Se
viceversa la velocità istantanea è così bassa da produrre una traiettoria di
caduta libera interna alla pista (curva gialla), il contatto viene meno. Quando la
condizione di contatto è soddisfatta nel punto più alto, essa è certamente
soddisfatta anche nell’intero tragitto, dato che forza di gravità fa diminuire
l’intensità della velocità man mano che l’auto sale.
Indicando con va la velocità alla sommità, in quel momento risulta:
N
y
N
W
N y Wy may
N mg m
va
La forza centripeta m
va
R
2
N mg m
va
2
R
2
che occorre per mantenere l’auto in pista è tanto più
piccola quanto minore è va . Il valore minimo di va è quello a cui basta la sola
gravità a produrre m
mg m
N
va
2
R
Esempio 10
Un’automobile
R
va
2
R
va
2
. Per esso risulta dunque N 0 nel punto più alto:
gR
va gR
di massa m percorre una curva di raggio R 150 m alla
velocità di 15.0 m/s . Sapendo che la strada è inclinata ed indicato con
l’angolo che essa forma con l’orizzontale, si trovi il valore di che permette
all’auto di percorrere la curva anche in assenza di attrito fra pneumatici ed
asfalto.
N
y
Come si ricava dalla figura la somma vettoriale della forza normale e del peso
debbono fornire la necessaria forza centripeta per descrivere una curva di
raggio R alla velocità assegnata. Il secondo principio della dinamica in forma
vettoriale si scrive:
x
W
N W ma
N mg maC
L’equazione sopra scritta è facilmente visualizzabile in termini geometrici
grazie al metodo di punta-coda. Si forma un triangolo di ipotenusa N ed i cui
cateti maC ed mg , in base ai dati del problema, devono essere rispettivamente
10
orizzontale e verticale. Si dimostra facilmente che è pure l’angolo fra N ed
mg . Risulta dunque:
|v |2
maC
m R
| v |2
15.02
tan
0.153
gR
9.81 150
mg
mg
N
R
mg
1
tan (0.153) 8.69
Allo stesso risultato si perviene facendo il rapporto delle componenti
orizzontale e verticale della forza normale:
| v |2
N x max N x m
R
N y Wy 0 N y mg 0 N y mg
|v |2
R
m
Nx
| v |2
tan
Ny
mg
gR
Esempio 11
Disco che gira con la massa sopra ed attrito
11
N
maC
mg
N
Nx
Ny