FACOLTÀ DI SCIENZE MATEMATICHE FISICHE E NATURALI
Corso di Laurea Triennale in Matematica
Teoremi di Brouwer e Schauder
e applicazioni
Relatore:
Dott.
Adriano PISANTE
Candidata:
Silvia GHINASSI
Matricola 1270394
Sessione Estiva
Anno Accademico 2010-2011
Dipartimento di Matematica ‘Guido Castelnuovo’
A Giulia
“ Quapropter bono christiano,
sive mathematici, sive quilibet impie divinantium,
maxime dicentes vera, cavendi sunt,
ne consortio daemoniorum animam deceptam,
pacto quodam societatis irretiant. ”
Augustinus Hipponensis, De Genesi ad Litteram
Introduzione
“ The faculty of re-solution is possibly
much invigorated by mathematical study, and especially
by that highest branch of it which, unjustly,
and merely on account of its retrograde operations,
has been called, as if par excellence, analysis. ”
Edgar Allan Poe, The Murders of rue Morgue
In Matematica, molti problemi dell’analisi funzionale, come i problemi di
esistenza per equazioni differenziali, possono essere ridotti alla ricerca di punti fissi
per opportune trasformazioni. In uno spazio metrico completo il Teorema delle
contrazioni di Banach-Caccioppoli garantisce esistenza e unicità di un punto fisso
per applicazioni con costante di Lipschitz minore di uno. In questo lavoro esporremo
alcuni risultati di esistenza di punti fissi, ma non di unicità, sotto ipotesi di carattere
topologico per la funzione e lo spazio su cui è definita. Ci occuperemo in particolare
dei Teoremi di Brouwer e Schauder, tra i più noti in materia.
Il primo Capitolo tratta del Teorema di Brouwer (1912), del quale presentiamo
due diverse dimostrazioni. La prima fa uso del Principio del Retratto Negativo, la
seconda di metodi simpliciali come il Lemma di Sperner. Per la prima, partiamo
dal Teorema della Divergenza, grazie al quale dimostriamo il Principio del Retratto
Negativo e quindi, dopo alcune osservazioni sulle proprietà topologiche del punto
fisso, arriviamo a dimostrare il Teorema di Brouwer. In realtà, il Teorema di Brouwer
e il Principio del retratto negativo sono equivalenti. Per la seconda dimostrazione,
partendo dal Lemma di Sperner dimostriamo il Lemma di Knaster-KuratowskiMazurkiewicz (KKM), grazie al quale, passando per il caso simpliciale, dimostriamo
i
nuovamente il Teorema di Brouwer. Anche qui, osserviamo che l’ultimo risultato
utilizzato è effettivamente equivalente al Teorema di Brouwer.
Concludiamo il
Capitolo con una prima elementare applicazione del Teorema di Brouwer, il Teorema
di Perron-Frobenius.
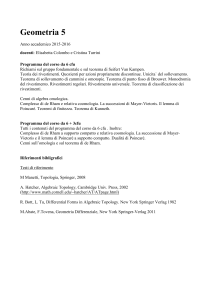
Figura 1: Schema riassuntivo dei risultati presentati
Nel secondo Capitolo passiamo allo studio di punti fissi in spazi di dimensione
infinita, grazie al Teorema di Schauder (1930). Iniziamo mostrando, grazie ad un
facile controesempio, che il Teorema di Brouwer non vale in dimensione infinita.
Successivamente enunciamo e dimostriamo un classico risultato sull’approssimazione
di operatori compatti tramite operatori di rango finito, che ci permetterà di
dimostrare il Teorema di Schauder a partire dal Teorema di Brouwer. Anche in
questo caso, consideriamo un secondo approccio al teorema, generalizzando il Lemma
KKM al Lemma di Fan, per poi dimostare il Teorema di Tychonov che vale per spazi
vettoriali topologici localmente convessi. Come corollario di questo teorema, negli
spazi di Banach otteniamo nuovamente il Teorema di Schauder.
ii
Il terzo Capitolo riguarda alcune applicazioni dei due risultati oggetto dei
precedenti capitoli. Iniziamo con il noto ed intuitivo Teorema della curva di Jordan,
del quale il Teorema di Brouwer consente di dare una dimostrazione tra le più
semplici conosciute. Passiamo quindi allo studio di punti fissi per multifunzioni
(nel caso finito dimensionale), grazie ad una generalizzazione del Teorema di
Brouwer, cioè il Teorema di Kakutani. Come applicazioni del Teorema di Schauder,
presentiamo il Teorema di Peano e il Teorema di Lomonosov.
Il primo è un
risultato di esistenza, ma non di unicità, per il problema di Cauchy per equazioni
differenziali ordinarie con secondo membro compatto. Il Teorema di Picard-Lindelöf,
che garantisce l’unicità, richiede un secondo membro lipschitziano, utilizzando il
Teorema di Banach-Caccioppoli. Il secondo risultato invece riguarda l’esistenza di
sottospazi invarianti per operatori su spazi di Banach, questione alla quale fu data
da Lomonosov una risposta affermativa (1973) nel caso di operatori che commutano
con un operatore compatto.
Aggiungiamo, per chiarezza, un semplice diagramma (vedi Fig. 1) che riassume
i risultati qui presentati, mettendo in evidenza le implicazioni che sussistono tra di
essi.
iii
Indice
Introduzione
i
1 Il Teorema di Brouwer
1
1.1
Estensione di applicazioni continue . . . . . . . . . . . . . . . . . . .
1
1.2
Retrazione su sottospazi . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.3
Una prima dimostrazione del Teorema di Brouwer . . . . . . . . . . .
7
1.4
Intersezione di insiemi convessi
8
1.5
Simplessi m-dimensionali e Lemma di Sperner . . . . . . . . . . . . . 10
1.6
Il Lemma KKM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.7
Una seconda dimostrazione del Teorema di Brouwer . . . . . . . . . . 13
1.8
Il Teorema di Perron-Frobenius . . . . . . . . . . . . . . . . . . . . . 15
. . . . . . . . . . . . . . . . . . . . .
2 Il Teorema di Schauder
17
2.1
Approssimazione di operatori compatti . . . . . . . . . . . . . . . . . 17
2.2
Il Teorema di Schauder . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3
Il Lemma di Fan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.4
Spazi Vettoriali Topologici Localmente Convessi . . . . . . . . . . . . 24
2.5
I Teoremi di Tychonov e di Schauder . . . . . . . . . . . . . . . . . . 26
3 Applicazioni
31
3.1
Il Teorema della Curva di Jordan . . . . . . . . . . . . . . . . . . . . 31
3.2
Punti fissi per multifunzioni . . . . . . . . . . . . . . . . . . . . . . . 35
3.2.1
Preliminari sulle multifunzioni . . . . . . . . . . . . . . . . . . 35
v
3.2.2
3.3
3.4
Il Teorema di Kakutani . . . . . . . . . . . . . . . . . . . . . . 37
Equazioni differenziali ordinarie . . . . . . . . . . . . . . . . . . . . . 39
3.3.1
Il Teorema di Ascoli-Arzelà . . . . . . . . . . . . . . . . . . . 39
3.3.2
Il Teorema di esistenza di Peano . . . . . . . . . . . . . . . . . 41
Sottospazi invarianti e Teorema di Lomonosov . . . . . . . . . . . . . 43
Bibliografia
48
vi
Capitolo 1
Il Teorema di Brouwer
Il Teorema di Brouwer è indubbiamente uno dei teoremi di punto fisso più
famosi in matematica. Di esso esistono numerose dimostrazioni basate su tecniche
diverse, tanto analitiche quanto topologiche o combinatoriche. Vedremo in seguito
due diversi approcci al Teorema di Brouwer: uno topologico basato sul Principio del
retratto negativo e uno combinatorio, basato sul Lemma di Sperner e sul Lemma
KKM.
1.1
Estensione di applicazioni continue
Definizioni 1.1.1. Sia X spazio metrico, M, N ⊆ X, M, N 6= ∅. Definiamo:
• d(N, M ) := inf{d(x, y) | x ∈ N, y ∈ M } (distanza tra sottoinsiemi)
• d(x, M ) := inf{d(x, y) | y ∈ M } (distanza di un punto da un sottoinsieme)
• diam(M ) := sup{d(x, y) | x, y ∈ M } (diametro di un sottoinsieme)
Definizione 1.1.2. Un raffinamento V = {Vβ } di un ricoprimento U = {Uα } è un
ricoprimento tale che per ogni insieme del raffinamento esista un insieme del primo
ricoprimento che lo contiene, i.e. per ogni Vβ ∈ V esiste Uα ∈ U tale che Vβ ⊆ Uα .
1
2
1. Il Teorema di Brouwer
Definizione 1.1.3. Un raffinamento V = {Vβ } si dice localmente finito se ogni
x ∈ X ha un intorno con intersezione non vuota con al più un numero finito di
insiemi Vβ del raffinamento.
Definizione 1.1.4. Uno spazio topologico X si dice paracompatto se ogni
ricoprimento aperto U di X ha un raffinamento localmente finito.
Esempio 1.1.5. Spazi metrici e spazi compatti sono paracompatti (vedi [Bou74]).
Definizione 1.1.6. Sia f : M ⊆ X → R. Il supporto di f , supp(f ), è la chiusura
dell’insieme {x ∈ M | f (x) 6= 0}.
Proposizione 1.1.1 (Partizioni dell’unità). Sia X uno spazio paracompatto. Sia
{Uα } un ricoprimento aperto di X. Allora esiste una partizione dell’unità {fα }
subordinata a {Uα }. Più precisamente c’è un sistema di funzioni continue a valori
reali {fα } tale che:
(i) 0 ≤ fα (x) ≤ 1, per ogni x ∈ X e per ogni α.
(ii)
P
α
fα (x) = 1, per ogni x ∈ X.
◦
(iii) Il ricoprimento {supp(fα )} è localmente finito, i.e. per ogni x ∈ X esiste un
intorno U (x) tale che al più un numero finito di fα non è identicamente nullo
in U (x).
◦
(iv) Il ricoprimento {supp(fα )} di X è un raffinamento di {Uα }, i.e. per ogni α
◦
esiste β tale che supp(fα )⊆ Uβ . Se ne esiste solo un numero finito U1 , . . . , Un ,
◦
allora f1 , . . . , fn possono essere scelte in modo tale che supp(fi )⊆ Ui , i =
1, . . . , n.
Per la dimostrazione di questo classico risultato di topologia generale,
rimandiamo in particolare a [Bou74].
Proposizione 1.1.2 (Tietze, 1915 - Dungundji, 1951). Sia (X, d) uno spazio
metrico, M ⊆ X sottoinsieme chiuso non vuoto e Y spazio normato. Allora
T : M → Y applicazione continua ha un’estensione continua Te : X → conv T (M ) .
1.1 Estensione di applicazioni continue
Dimostrazione.
3
(I) Per ogni ξ ∈ X \ M sia Uξ una palla aperta contenente ξ
con diam(Uξ ) < d(Uξ , M ). Questo ci dà un ricoprimento {Uξ } di X \ M . Per
P
questo ricoprimento esiste una partizione dell’unità, fi (x), con i∈J fi (x) = 1,
per ogni x ∈ X \ M , dove le fi : X \ M → [0, 1] sono continue e nulle al di fuori
di Uξ(i) , per un opportuno ξ(i) ; inoltre ogni x ∈ X \ M ha un intorno V (x) tale
che al più un numero finito di fi non è identicamente nullo in V (x). Per ogni
ξ ∈ X \ M scegliamo mξ ∈ M tale che d(mξ , Uξ ) < 2 d(M, Uξ ) e definiamo
T (x)
se x ∈ M ,
Te(x) = P
f (x)T (m ) se x ∈ X \ M .
i∈J
(II) Essendo le fi tali che
i
ξ(i)
e(x) ∈ conv T (M ) . Te è banalmente
f
(x)
=
1,
T
i
i∈J
P
continua su M o e su X\M perché il raffinamento è localmente finito: dobbiamo
dunque verificare che lo è anche su ∂M . Prendiamo x0 ∈ ∂M ; allora
Te(x0 ) = T (x0 ). Se x ∈ X \ M e fi (x) 6= 0, allora per costruzione delle
fi , abbiamo x ∈ Uξ dove poniamo ξ = ξ(i) . Applicando la disuguaglianza
triangolare, d(mξ , x) ≤ d(mξ , Uxi ) + diam(Uξ ) ≤ 3 d(M, Uξ ) ≤ 3 d(x, x0 ) e
quindi d(mξ , x0 ) ≤ d(mξ , x) + d(x, x0 ) ≤ 4 d(x, x0 ). Essendo 0 ≤ fi (x) ≤ 1 e
fi (x) = 0 per d(mξ(i) , x0 ) > 4 d(x, x0 ), abbiamo per ogni x ∈ X \ M
X
e
fi (x) T (mξ(i) ) − T (x0 ) ≤ sup A(x),
T (x) − Te(x0 ) = i∈J
dove
A(x)
=
n
o
T (mξ(i) ) − T (x0 ) i ∈ J, d(mξ(i) , x0 ) ≤ 4 d(x0 , x) .
L’insieme A(x) è limitato, o meglio finito, infatti per ogni x fissato, essendo il
raffinamento localmente finito, al più un numero finito delle fi non si annullano
su di esso.
(III) Verifichiamo dunque la continuità di Te: sia {xn } ⊆ X \ M per ogni n e
xn → x0 ; la continuità di T in x0 implica che sup A(xn ) → 0 per n → ∞.
Allora Te(xn ) → Te(x0 ). Se invece {xn } ∈ M per ogni n e xn → x0 , allora
T (xn ) = Te(xn ), quindi Te(xn ) → Te(x0 ). Allora Te è continuo in x0 ∈ ∂M .
4
1. Il Teorema di Brouwer
1.2
Retrazione su sottospazi
Definizione 1.2.1. Sia X uno spazio topologico, M ⊆ X e r : X → M
un’applicazione continua. r si dice una retrazione di X su M se e solo se r(x) = x,
∀x ∈ M . In questo caso M si dice un retratto di X.
Lemma 1.2.1. La proprietà di punto fisso è preservata dalle retrazioni, i.e. se ogni
e è un retratto di K, allora ogni
funzione continua f : K → K ha un punto fisso e K
e →K
e ha un punto fisso.
funzione continua φ : K
e una retrazione e consideriamo l’applicazione i ◦ φ ◦
Dimostrazione. Sia r : K → K
r : K → K che (per ipotesi) ha un punto fisso: chiamiamolo x̄. Abbiamo quindi che
x̄ = i ◦ φ ◦ r(x̄), ed essendo i l’inclusione di insiemi e r|Ke l’identità, possiamo dire
e e φ(x̄) = x̄.
che x̄ ∈ K
Lemma 1.2.2. Ogni sottoinsieme chiuso e convesso M di uno spazio normato X è
un retratto di X.
Dimostrazione. Usando il Teorema di estensione, estendiamo l’applicazione identità,
I : M → M a r : X → conv(M ). Essendo M convesso, conv(M ) = M .
Questi risultati saranno usati per dimostrare il Teorema di Brouwer per una
palla, per poi passare al caso di un insieme convesso compatto generico. In realtà,
il risultato principale che useremo è il seguente
Teorema 1.2.3 (Principio del retratto negativo). Il bordo ∂B(x0 , R) della palla
chiusa N-dimensionale B(x0 , R), R > 0, N ≥ 1 non è un retratto di B(x0 , R).
Al fine di dimostrare il Principio del retratto negativo presentiamo alcuni
risultati preliminari.
Lemma 1.2.4. Se esiste una retrazione continua di B N = B(0, 1) su S N −1 = ∂B N ,
allora ne esiste una di classe C ∞ .
Dimostrazione. Sia r : B N → S N −1 una retrazione continua, e definiamo
r(x) se x ∈ B N ,
r̃(x) =
x
se x ∈
/ BN .
1.2 Retrazione su sottospazi
5
(I) Sia r̃ε = r̃ ∗ ρε , la convoluzione di r̃ con il mollificatore ρε . Ovviamente
r̃ε (x) ∈ C ∞ (RN ; RN ). Inoltre, se ρε è radiale, r̃ε (x) = x se |x| > 1 + ε.
Infatti, la j-esima componente di r̃ε (x), quando x non appartiene all’ε-intorno
R
R
della palla, è r̃ε (x) j = yj ρε (x − y) dy = (yj − xj ) + xj ρε (x − y) dy =
R
R
(yj − xj )ρε (x − y) dy + xj ρε (x − y) dy; il secondo addendo è uguale a xj , per
definizione di ρε , mentre il primo è nullo. Infatti, se poniamo z = y − x
e denotiamo con z̄ il vettore di RN −1 dato dal vettore z privato della jR
esima componente zj , abbiamo, per il Teorema di Fubini, RN zj ρε (z) dz =
R
R
z
ρ
(z̄,
z
)
dz
dz̄ = 0, perché l’integrando è dispari in zj .
j
ε
j
j
N
−1
R
R
(II) Definiamo quindi r̂ε =
1
r̃
1+ε ε
(1 + ε)x da B N a RN . Per quanto detto sopra
e per continuità di r̃ε , r̂ε |S N −1 = Id.
(III) Poichè r̃ è continua,r̃ε ⇒ r̃ uniformemente sui compatti quando ε → 0, quindi
anche r̂ε ⇒ r̃ uniformente sui compatti quando ε → 0. Osserviamo che r̃
non assume valori dentro B N , perché in B N r̃(x) ≡ r(x) ∈ S N −1 e quindi
|r̂ε (x)| → 1 uniformemente se ε → 0. Definiamo infine r̄ε (x) = r̂ε (x)/|r̂ε (x)|;
le funzioni r̄ε sono retrazioni di B N su S N −1 di classe C ∞ che, se ε → 0,
convergono uniformemente sui compatti a r(x).
Ricordiamo ora un classico teorema di calcolo differenziale, del quale omettiamo
la dimostrazione.
Teorema 1.2.5 (Divergenza). Sia Ω un aperto non vuoto connesso e limitato di
RN , con frontiera di classe C 1 e f : Ω → RN un’applicazione di classe C 1 in Ω.
Allora, se ~n denota la normale esterna a ∂Ω e dσ la misura di superficie su ∂Ω,
Z
Z
div f dx =
f · ~n dσ(y).
Ω
∂Ω
Siamo ora in grado di dimostrare il Teorema 1.2.3.
Dimostrazione Teorema 1.2.3. Per assurdo, supponiamo che ∂B N sia un retratto
di B N .
Sia r : B B → S N −1 una retrazione di classe C ∞ , che esiste per il
6
1. Il Teorema di Brouwer
Lemma 1.2.4. Sia Vr (x) = Vr1 (x), . . . , VrN (x) un campo vettoriale definito da
c
c
∂
∂
Vrj (x) = det( ∂x∂ 1 r, . . . , ∂x
r, . . . , ∂x∂N r), dove con ∂x
indichiamo l’omissione della
j
j
derivata parziale rispetto alla variabile xj nella j-esima colonna.
(I) Mostriamo che div Vr (x) = N det Dr(x) , dove con Dr(x) indichiamo la
c
∂
∂2
∂
matrice jacobiana di r. Sia Vri,j = det ∂x∂ 1 r, . . . , ∂x
r,
.
.
.
,
r,
.
.
.
,
r
,
∂xi ∂xj
∂xN
j
∂2
r
∂xj ∂xi
dove r è il j-esimo vettore colonna e
div Vr (x) =
N
X
∂/∂xj Vrj (x)
l’i-esimo. Abbiamo quindi
N X
X
= N det Dr(x) +
Vri,j (x)
j=1
j=1 i6=j
e l’ultima sommatoria è identicamente nulla, perché, per ogni i, j abbiamo
Vri,j = −Vrj,i .
(II) Osserviamo ora che, essendo |r(x)| ≡ 1, abbiamo det Dr(x) ≡ 0; infatti,
Dr(x) manda uno spazio N -dimensionale in un sottospazio di dimensione
N − 1.
(III) Poiché r(x) = x, se |x| = 1, abbiamo Vrj (x) = det
c
∂
∂
x, . . . , ∂x∂N x
x, . . . , ∂x
∂x1
j
N
=
xj e quindi Vr (x) = x, cioè il campo vettoriale identità su ∂B .
(IV) Grazie ai precedenti punti e al Teorema della Divergenza, otteniamo
Z
0=
N det Dr(x) dx =
Z
Z
Vr (x) · ~n dσ(x) =
S N −1
BN
Z
=
S N −1
x · x dσ(x) =
S N −1
1 dσ(x) = S N −1 6= 0,
il che è assurdo; quindi non può esistere una retrazione liscia di B N in S N −1 e
di conseguenza non esiste una retrazione continua.
1.3 Una prima dimostrazione del Teorema di Brouwer
1.3
7
Una prima dimostrazione del Teorema di
Brouwer
Teorema 1.3.1 (Brouwer, 1912). Sia M ⊆ RN sottoinsieme non vuoto, convesso,
chiuso e limitato, f : M → M continua. Allora f ha un punto fisso.
Dimostrazione.
(I) Supponiamo M = B, palla chiusa di raggio R > 0.
Supponiamo che f non abbia punti fissi, cioè f (x) 6= x, per ogni x ∈ B.
Allora possiamo costruire una retrazione della palla sulla sua frontiera nel
modo seguente: per ogni x tracciamo il segmento che passa per x da f (x), e
definiamo r(x) la sua intersezione con ∂B. Se x ∈ ∂B allora r(x) = x, cioè
r : B → ∂B è una retrazione di B su ∂B. Inoltre è immediato verificare che
tale applicazione è continua. Ciò contraddice il Principio del retratto negativo.
(II) Per un M più generico, scegliamo una palla chiusa B che lo contiene. Allora
per il Lemma 1.2.2 esiste una retrazione r : B → M . Per il Lemma 1.2.1 la
proprietà di punto fisso vale per ogni retratto di B, e quindi f : M → M ha
un punto fisso.
Osservazione 1.3.1. È importante menzionare che il Teorema di Brouwer è
equivalente al fatto che S N −1 non è una retrazione di B N = {x ∈ RN | kxk ≤ 1}.
Infatti, supponiamo che S N −1 sia una retrazione del palla; dal Teorema di Brouwer,
e dall’invarianza della proprietà di punto fisso per retrazione, seguirebbe che ogni
applicazione continua da ∂B N in se stesso ammetterebbe un punto fisso. Questo è
però falso, poiché l’applicazione x 7→ −x che è continua da S N −1 a S N −1 non ha
punti fissi.
Se una qualsiasi delle ipotesi del teorema viene rimossa, questo cessa di essere
valido (che non significa, ovviamente, che sono necessarie); vediamolo con alcuni
controesempi.
• Se K non è convesso: possiamo scegliere e.g. K = {x ∈ R2 |
f = rotazione 6= Id, allora non esistono punti fissi.
1
2
≤ |x| ≤ 1} e
8
1. Il Teorema di Brouwer
• Se K non è compatto: possiamo scegliere e.g. K = R e f (x) = x + 1 (K non
limitato) oppure K = (−1, 1) e f (x) = 12 (x + 1) (K non è chiuso). In entrambi
i casi tali funzioni non hanno punto fisso.
• Se f non è continua: possiamo scegliere e.g. K = [−1, 1] e f (x) =
x
2
se x 6= 0
e f (0) = 1. Allora f è priva di punti fissi.
Presentiamo infine un semplice risultato, la cui importanza risiede nel fatto che
dà una condizione sufficiente per l’esistenza di un punto fisso senza richiedere la
convessità.
Lemma 1.3.2. La proprietà di punto fisso è invariante rispetto agli omeomorfismi,
e è omemorfo a K,
i.e. se ogni funzione continua f : K → K ha un punto fisso, e K
e →K
e ha un punto fisso.
allora ogni funzione continua φ : K
e un omeomorfismo e consideriamo l’applicazione
Dimostrazione. Sia h : K → K
h−1 ◦ φ ◦ h : K → K che per ipotesi ha un punto fisso: sia x̄ questo punto. Allora
x̄ = h−1 ◦ φ ◦ h(x̄) e quindi h(x̄) = φ ◦ h(x̄), cioè h(x̄) è un punto fisso di φ.
1.4
Intersezione di insiemi convessi
Presentiamo ora alcuni semplici risultati sull’intersezione di insieme convessi,
che ci saranno utili in seguito.
Definizione 1.4.1. Una famiglia A di sottoinsiemi non vuoti di un insieme X ha
la proprietà dell’intersezione finita se ogni sottofamiglia finita non vuota di A ha
un’intersezione non vuota.
Teorema 1.4.1. Sia X una spazio topologico compatto e F una famiglia di
sottoinsiemi chiusi di X. Se F ha la proprietà dell’intersezione finita, allora
T
F ∈F F 6= ∅.
Dimostrazione. Supponiamo per assurdo
T
F ∈F
F = ∅. Allora
S
F ∈F
F c = X.
Essendo F chiuso, F c è aperto per ogni F ∈ F. Allora {F c }F ∈F è un ricoprimento
1.4 Intersezione di insiemi convessi
9
S
aperto di X; essendo X compatto esiste un sottoricoprimento finito, X = ni=1 Fi ,
T
con Fi ∈ F. Passando nuovamente al complementare, otteniamo ni=1 Fi = ∅, che
contraddice l’ipotesi che F abbia la proprietà dell’intersezione finita.
Osservazione 1.4.2. Il viceversa è anch’esso vero, quindi gli spazi topologici
compatti possono essere caratterizzati come quelli in cui ogni famiglia di insiemi
chiusi con la proprietà dell’intersezione finita ha un’intersezione non vuota. Infatti,
T
sia F una famiglia di chiusi tali che F ∈F F = ∅ implica che esiste n tale che
Tn
S
c
F
=
∅.
Passando
al
complementare
otteniamo
che
i
i=1
F ∈F F = X implica che
Sn
esiste n tale che X = i=1 Fic , con Fi ∈ F, cioè un sottoricoprimento finito di un
ricoprimento aperto. Per l’arbitrarietà di F, X è compatto.
Teorema 1.4.2 (Helly). Siano Ki , i = 1, . . . , n con n ≥ N +1, n insiemi convessi in
T
RN . Se ogni (N +1)−pla di questi ha un’intersezione non vuota, allora ni=1 Ki 6= ∅.
Dimostrazione. (Radon). Procediamo per induzione su n. Per n = N + 1 il teorema
è banalmente vero; supponiamo sia vero per n − 1 ≥ N + 1 e dimostriamolo per
T
n. Per ipotesi induttiva, esistono n punti x1 , . . . , xn tali che xi ∈ nj=1,j6=i Kj per
i = 1, . . . , n. Allora
(P
n
i=1
Pn
i=1
λi xi = 0
λi = 0
sono N + 1 equazioni lineari in n > N + 1 incognite λ1 , . . . , λn . Allora esiste una
soluzione non banale e senza perdita di generalità possiamo supporre λ1 ≥ 0, . . . λr ≥
P
P
0 e λr+1 ≤ 0, . . . , λn ≤ 0, con r ∈ {1, . . . , n}. Allora ri=1 λi = − ni=r+1 λi > 0 e il
punto y definito da
appartiene a
Tn
j=r+1
Pr
λ i xi
y = Pi=1
r
i=1 λi
Kj perché ogni xi con i = 1, . . . , r appartiene a ogni Kj con
j = r + 1, . . . , n, che sono convessi. Ma per quanto detto prima è vero anche
Pn
(−λi xi )
y = Pi=r+1
n
i=r+1 (−λi )
T
T
e quindi y ∈ rj=1 Kj . Allora y ∈ nj=1 Kj 6= ∅.
10
1. Il Teorema di Brouwer
Teorema 1.4.3. Sia K una famiglia arbitraria di insiemi convessi e compatti in
RN . Se ogni sottofamiglia di (N + 1) elementi ha un’intersezione non vuota, allora
T
K∈K K 6= ∅.
Dimostrazione. Sia K ∈ K.
F = {K ∩ K
Consideriamo la famiglia di sottoinsiemi di K,
| K ∈ K}. Dall’ipotesi e dal Teorema 1.4.2, F ha la proprietà
dell’intersezione finita. Quindi, per il Teorema 1.4.1 F ha intersezione non vuota.
T
T
Ma K∈F K coincide con K∈K K, che perciò è non vuoto.
1.5
Simplessi m-dimensionali e Lemma di Sperner
In RN , m + 1 punti x0 , . . . , xm , con m ≤ N , sono detti essere affinemente
indipendenti se gli m punti x1 − x0 , . . . , xm − x0 sono linearmente indipendenti
(m > 0; il singoletto {x0 } è definito affinemente indipendente).
Se x0 , . . . , xm sono m + 1 punti affinemente indipendenti di RN (0 ≤ m ≤ N )
l’insieme S = simp{x0 , . . . , xm } di tutte le combinazioni convesse dei punti xi è
detto m-simplesso o simplesso di dimensione m. I punti xi sono detti vertici del
simplesso e gli insiemi simp{xi0 , . . . , xik } con 0 ≤ k ≤ m ≤ N sono detti facce del
simplesso (o meglio facce di dimensione k del simplesso, i vertici sono anche detti
facce di dimensione 0).
Se x ∈ S possiamo univocamente determinare m + 1 numeri reali λ0 , . . . , λm tali che
P
Pm
λi ≥ 0 per ogni i, m
i=0 λi = 1 e x =
i=0 λi xi : questi numeri sono detti coordinate
baricentriche di x. Il simplesso standard in RN è l’inviluppo convesso della base
canonica {e1 , . . . , eN } e del vettore nullo, i.e. E = simp{0, . . . , eN }. In questo caso,
se x = (x1 , . . . , xN ) ∈ E, le xi e 0 sono le sue coordinate baricentriche. Ogni msimplesso di RN è l’immagine di E tramite un’applicazione lineare.
Sia S un m-simplesso in RN . Una famiglia finita Σ di simplessi contenuti in S è detta
essere una suddivisione in simplessi di S se le seguenti condizioni sono soddisfatte:
(i ) S è l’unione degli m-simplessi in Σ;
(ii ) l’intersezione di due simplessi in Σ è una faccia comune ai due simplessi;
1.6 Il Lemma KKM
11
(iii ) le facce dei simplessi di Σ sono dei simplessi di Σ.
Le facce di dimensione 0, che sono ovviamente i vertici dei simplessi di Σ, sono dette
nodi della suddivisione in simplessi.
Il massimo valore del diametro dei simplessi di dimensione m di Σ -nell’usuale
metrica di RN - è detto diametro della suddivisione.
Dato ε > 0 qualsiasi è
facile vedere che esiste una suddivisione in simplessi del simplesso standard E tale
che diam(Σ) < ε. Facendo poi l’immagine tramite un’applicazione lineare della
suddivisione, otteniamo che questo è vero per ogni simplesso S.
Sia S un m-simplesso di RN , Σ una sua suddivisione in simplessi e sia N l’insieme
dei nodi di Σ.
La suddivisione Σ è detta etichettata se esiste un’applicazione
` : N → {0, . . . , m}, detta l’etichettatura di Σ, che associa a ogni z ∈ N un numero
`(z) ∈ {0, . . . , m}, detto l’etichetta di z, in modo tale che se z è in una faccia di S
allora l’etichetta di z appartiene all’insieme di indici dei vertici della faccia, i.e.
z ∈ simp{xi0 , . . . , xik } ⇒ `(z) ∈ {io , . . . , ik };
(1.1)
in particolare, `({xj }) = j. Se T = simp{z0 , . . . , zj }, j ≥ 1 appartiene a Σ
per qualche {z0 , . . . , zj } ⊆ N , diciamo che l’insieme di numeri (non ordinato)
`(T ) = {`(z0 ), . . . , `(zj )} è l’etichetta di T .
Lemma 1.5.1 (Sperner). Dato un qualsiasi m-simplesso S = simp{x0 , . . . , xm }
in RN con m ≤ N , una qualsiasi suddivisione in simplessi Σ di S ed una qualsiasi
etichettatura ` di Σ, allora il numero degli m-simplessi in Σ con etichetta {0, . . . , m}
è dispari.
Non dimostriamo questo risultato, per una sua dimostrazione rimandiamo a
[Hua].
1.6
Il Lemma KKM
In questa sezione presentiamo il Lemma di Knaster-Kuratowski-Mazurkievicz,
al quale ci riferiamo, per brevità, come al Lemma KKM.
12
1. Il Teorema di Brouwer
Lemma 1.6.1 (KKM). Sia S = simp{x0 , . . . , xm } un m-simplesso di RN e siano
Fi , i = 0, . . . , m, m + 1 sottoinsiemi chiusi di RN tali che ogni faccia di S è coperta
dai chiusi corrispondenti, cioè
(i) per ogni insieme di indici I ⊆ {0, . . . , m}, simp{xi }i∈I ⊆
Allora,
Tm
i=0
S
i∈I
Fi .
Fi 6= ∅, cioè tutti i chiusi hanno un punto in comune.
Dimostrazione. Come sappiamo, per ogni k ≥ 1 esiste una suddivisione in simplessi
Σk di S tale che diam(Σk ) ≤ 1/k. Con l’aiuto del Lemma di Sperner vogliamo
dimostrare che per ogni k esiste un m-simplesso di Σk che ha un vertice in ogni Fi :
il teorema segue passando al limite su k. In dettaglio abbiamo quanto segue.
(I) Etichettiamo Σk in modo tale che un certo nodo v appartenga a Fek (v) ,
dove ek è l’etichettatura di Σk . Per fare questo, sia v (k) un nodo di Σk
e S 0 = simp{xi0 , . . . , xis } una faccia di S con la minima dimensione s che
S
contiene v (k) . Da (i) segue che S 0 ⊆ sj=0 Fij , e quindi che v (k) ∈ Fij per
qualche ij : chiamiamolo i¯j . Ponendo ek (v (k) ) = i¯j otteniamo un’etichettatura
per Σk con le condizioni richieste.
(II) Dal Lemma di Sperner sappiamo che esiste in Σk un m-simplesso Tk =
(k)
(k)
simp{v0 , . . . , vm } con etichetta {0, . . . , m}. Possiamo assumere, a meno di
(k)
(k)
riordinarli, che ek (vi ) = i e quindi che vi
∈ Fi .
(III) Facciamo tendere dunque k all’infinito: essendo S un insieme compatto,
(k)
dalla successione vi
di punti di Fi possiamo estrarre una sottosuccessione
convergente a v̄i ∈ Fi (Fi è chiuso). Inoltre se k → +∞ diam(Σk ) → 0 e quindi
T
(k)
i vertici vi convergono tutti ad un unico punto v = v¯0 = · · · = v¯m ∈ m
i=0 Fi ;
T
T
di più {v} = k Tk perché diam k Tk ≤ limk→∞ diam(Tk ) = 0, e quindi non
può contenere più di un punto.
1.7 Una seconda dimostrazione del Teorema di Brouwer
1.7
Una seconda dimostrazione del Teorema di
Brouwer
Vediamo ora una seconda dimostrazione del Teorema di Brouwer che utilizza
il Lemma di Knaster-Kuratowski-Mazurkievicz.
Il metodo qui seguito sembra
essere più veloce, sebbene meno profondo del precedente. D’altra parte, l’approccio
simpliciale al teorema ci consentirà, come vedremo in seguito, generalizzazioni più
ampie del Teorema di Brouwer.
Lemma 1.7.1. Sia S un N-simplesso di RN . Se K ⊆ S è un insieme convesso e
chiuso, allora K è un retratto di S.
Dimostrazione. È sufficiente considerare r : S → K definita, per ogni x ∈ S, da
r(x) = PK (x), dove PK è la proiezione di x su K (PK è ben definita e continua
perché K è convesso e chiuso).
Lemma 1.7.2 (Teorema di Brouwer per i simplessi). Sia S = simp{x0 , . . . , xN } un
N-simplesso di RN . Se f : S → S è continua allora ha almeno un punto fisso.
Dimostrazione. Questo lemma storicamente precede il Teorema di Brouwer, ed è
dovuto a Bohl. L’idea principale della dimostrazione è molto semplice: scopriamo
che f ha almeno un punto fisso osservando come f ‘muove’ i punti di S.
(I) Per fare questo rappresentiamo i punti di S in termini delle loro coordinate
P
baricentriche. Se x ∈ S allora possiamo scriverlo come x = N
i=0 λi xi , con
PN
λi ≥ 0 e i=0 λi = 1. I λi = λi (x), come può essere facilmente dimostrato
sono funzioni continue della x.
(II) Poniamo ora Fi = {x ∈ S | λi (f (x)) ≤ λi (x)}, i = 0, . . . , m e mostriamo che
TN
i=0 Fi 6= ∅, da cui si può facilmente vedere che esiste un punto x̄ ∈ S le cui
coordinate baricentriche non sono cambiate da f , e che è quindi fissato.
(II-A) Infatti, se x̄ ∈
TN
i=0
Fi , allora
λi (f (x)) ≤ λi (x) per i = 0, . . . , N
13
14
1. Il Teorema di Brouwer
ed essendo
N
X
λi (f (x)) =
i=0
N
X
λi (x) = 1,
i=0
abbiamo λi (f (x)) = λi (x), per ogni i, cioè x = f (x), perché i due punti
hanno stesse coordinate baricentriche.
TN
(II-B) Per vedere che
6= ∅ usiamo il Lemma KKM. Si vede
i=0 Fi
immediatamente che gli Fi sono chiusi, perché le λi e la f sono
S
funzioni continue; per vedere che simp{xi }i∈I ⊆
i∈I Fi , comunque
preso I ⊆ {0, . . . , m}, dobbiamo solo ricordare che se y ∈ simp{xi }i∈I
P
S
allora i∈I λi (y) = 1, e se, per assurdo, avessimo y ∈
/ i∈I Fi , allora
λi (f (y)) > λi (y) per ogni i ∈ I e quindi
1≥
X
i∈I
λi (f (y)) >
X
λi (y) = 1,
i∈I
il che è impossibile.
Grazie a questi due lemmi, siamo quindi in grado di dare un’altra dimostrazione
del Teorema di Brouwer.
Teorema 1.7.3 (Brouwer). Sia M un insieme chiuso, limitato, convesso e non
vuoto di RN . Se f : M → M è una funzione continua, allora f ha almeno un punto
fisso.
Dimostrazione. Essendo M limitato è contenuto in un qualche N-simplesso S.
Essendo chiuso e convesso è un retratto di S, grazie al Lemma 1.7.1 e dunque,
per il Lemma 1.2.1, vale la proprietà di punto fisso. Abbiamo dunque dimostrato il
Teorema di Brouwer.
Osservazione 1.7.1. È importante menzionare che in realtà il Lemma KKM è
equivalente al Teorema di Brouwer, risultato osservato già dagli stessi Knaster,
Kuratowski e Mazurkiewicz. Per la dimostrazione, rimandiamo a [KKM29].
1.8 Il Teorema di Perron-Frobenius
1.8
15
Il Teorema di Perron-Frobenius
Vediamo ora una semplice e diretta applicazione del Teorema di Brouwer
all’algebra lineare, il Teorema di Perron-Frobenius. Esso ci assicura che, data una
matrice a entrate non negative, questa abbia almeno un autovalore non negativo con
relativo autovettore a componenti non negative.
Teorema 1.8.1 (Perron-Frobenius). Sia A ∈ MN ×N (R), A = (aij )i,j=1,...,N con
aij ≥ 0 per i, j = 1, . . . N . Allora esistono λ ≥ 0, x̄ ∈ RN \ {0} con x̄i ≥ 0 per ogni
i, tali che Ax̄ = λx̄.
Dimostrazione. Siano x = (x1 , . . . , xN ), Ax = ((Ax)1 , . . . , (Ax)N ). Sia K il
PN
compatto convesso definito da K = {x ∈ RN | xi ≥ 0
i=1 xi = 1} e sia f : K → R
PN
definita da f (x) = i=1 (Ax)i . Ovviamente f è continua e f (x) ≥ 0 per ogni x ∈ K.
Essendo K compatto, f ammette minimo x su K. Nel caso che f (x) = 0 il teorema
è vero con λ = 0 e x̄ = x. Supponiamo allora f (x) > 0 e definiamo T : K → K,
!
(Ax)i
.
T (x) = PN
j=1 (Ax)j i=1,...,N
L’operatore T è continuo da K compatto e convesso in sé, allora per il Teorema
di Brouwer esiste un punto fisso, cioè esiste x̄ ∈ K tale che T (x̄) = x̄.
P
λ= N
j=1 (Ax̄)j > 0. Allora
T (x̄) =
cioè Ax̄ = λx̄.
(Ax̄)i
λ
= x̄,
i=1,...,N
Sia
16
1. Il Teorema di Brouwer
Capitolo 2
Il Teorema di Schauder
Nel precedente capitolo ci siamo occupati dell’esistenza di punti fissi in RN .
Vogliamo ora passare a spazi infinito dimensionali, generalizzando il Teorema di
Brouwer. Storicamente il Teorema di Schauder nasce, come vedremo nel capitolo
successivo, per dimostrare teoremi di esistenza di soluzioni di equazioni differenziali
ordinarie, sotto ipotesi più deboli della lipschitzianità, e per ottenere risultati
analoghi per equazioni a derivate parziali.
2.1
Approssimazione di operatori compatti
L’obiettivo è quello di generalizzare il Teorema di Brouwer a spazi di Banach
infinito dimensionali tramite un processo di approssimazione di operatori compatti
tramite operatori di rango finito, al fine di ottenere il Teorema di Schauder. Per
spazi infinito dimensionali, come vedremo in seguito abbiamo bisogno dell’ipotesi
supplementare di compattezza del dominio dell’operatore (o equivalentemente della
compattezza dell’operatore stesso). L’esempio seguente, dovuto a Kakutani, mostra
infatti che il Teorema di Brouwer non vale su spazi di Banach di dimensione infinita.
p
Esempio 2.1.1. In `2 (N) consideriamo l’operatore T (x) = ( 1 − kxk2 , x1 , x2 , . . . )
P∞
2
definito per kxk ≤ 1, dove x = (x1 , x2 , . . . ) e kxk2 =
i=1 |xi | . L’operatore
p
p
T è continuo, infatti kT (x) − T (y)k2 = | 1 − kxk2 − 1 − kyk2 |2 + kx − yk2 ≤
17
18
2. Il Teorema di Schauder
|kxk2 −kyk2 |+kx−yk2 ≤ (kxk+kyk)kx−yk+kx−yk2 ≤ 2kx−yk+kx−yk2 . Inoltre T
manda la palla unitaria chiusa nel suo bordo in quanto kT (x)k2 = 1−kxk2 +kxk2 = 1.
Vediamo che però T non ha punti fissi, infatti se fosse T (x) = x, dovremmo
necessariamente avere kxk = 1 per quanto appena detto, e inoltre dovrebbe essere
(0, x1 , x2 , . . . ) = (x1 , x2 , . . . ), cioè xi = 0 per ogni i. Ma in tal caso sarebbe
kxk = 0 6= 1.
Definizione 2.1.2. M sottoinsieme di uno spazio di Banach si dice relativamente
compatto se M è compatto.
Definizione 2.1.3. X, Y spazi di Banach, T : D(T ) ⊆ X → Y operatore. T si dice
compatto se:
• T è continuo,
• T manda insiemi limitati in insiemi relativamente compatti.
Osservazione 2.1.4. Se T è un operatore lineare, la seconda condizione implica
la prima. In spazi di Banach finito dimensionali, operatori continui e operatori
compatti sono la stessa cosa se il dominio D(T ) è chiuso. Infatti, se M è limitato,
allora M ⊆ D(T ) è compatto, essendo dim(X) < ∞. Allora f M è compatto, e
quindi f (M ) ⊆ f M è relativamente compatto.
Esempio 2.1.5. Tipici esempı̂ di operatori compatti su spazi di Banach di
dimensione infinita sono operatori integrali con integrandi sufficientemente regolari:
b
Z
T [x](t) =
K (t, s, x(s)) ds (Operatori integrali di tipo Fredholm)
a
Z
S[x](t) =
t
K (t, s, x(s)) ds (Operatori integrali di tipo Volterra)
a
con K : [a, b] × [a, b] × [−R, R] → K continua, −∞ < a < b < +∞ e 0 < R < ∞,
K = R, C, M = {x ∈ C o ([a, b]; K) | kxk ≤ R}, kxk = maxa≤s≤b |x(s)|. Sotto queste
ipotesi T ed S (come operatori da M a C o ([a, b]; K) ) sono compatti.
2.1 Approssimazione di operatori compatti
19
Definizione 2.1.6. Siano (X, d) uno spazio metrico, A ⊆ X ed ε > 0. Un insieme
finito {x1 , ..., xn } di punti di X è detto una ε-rete finita per A se, per ogni x ∈ A,
esiste k = 1, ..., n tale che d(x, xk ) < ε.
Osservazione 2.1.7. Una caratterizzazione che ci sarà spesso utile degli insiemi
relativamente compatti in spazi metrici completi è tramite le ε-reti:
M è
relativamente compatto se e solo se per ogni ε > 0 esiste una ε-rete finita per
M.
Teorema 2.1.1 (Teorema di approssimazione per operatori compatti). X, Y spazi
di Banach, M ⊆ X limitato. Sia T : M → Y un operatore dato. Allora T è compatto
se e solo se valgono le seguenti condizioni:
(i) per ogni n ∈ N esiste Pn : M → Y operatore compatto tale che
supx∈M kT (x) − Pn (x)k ≤ 1/n
(ii) dim (span Pn (M )) < ∞
Dimostrazione.
(I) Sia T compatto.
Allora T (M ) è relativamente compatto,
quindi per ogni n esiste yi ∈ T (M ), i = 1, . . . , N tali che
min kT (x) − yi k < 1/n ∀x ∈ M
i
cioè una 1/n-rete finita. Definiamo l’operatore di Schauder,
PN
ai (x)yi
Pn (x) = Pi=1
N
i=1 ai (x)
con ai (x) = max{1/n − kT (x) − yi k, 0}.
L’operatore Pn soddisfa tutte
le proprietà richieste, infatti le ai sono continue e non si annullano
contemporaneamente per ogni x ∈ M , dunque Pn è ben definito e continuo;
inoltre
P
N a (x)(y − T (x) PN a (x)1/n
1
i
i
i=1 i
kPn (x) − T (x)k = i=1PN
= .
≤ P
N
n
i=1 ai (x)
i=1 ai (x)
La limitatezza di T (M ) implica la limitatezza di Pn (M ); inoltre l’insieme
Pn (M ) giace in uno spazio finito dimensionale (generato da y1 , . . . , yN ) e quindi
Pn (M ) è relativamente compatto, cioè Pn è compatto.
20
2. Il Teorema di Schauder
(II) Viceversa, supponiamo che per ogni n ∈ N esiste Pn : M → Y compatto tale
che supx∈M kT (x) − Pn (x)k ≤ 1/n e dim (span (Pn (M ))) < ∞. Essendo T il
limite uniforme di operatori continui è anch’esso continuo, infatti, dato x ∈ M ,
abbiamo
kT (x) − T (y)k = kT (x) − Pn (x) + Pn (x) − Pn (y) + Pn (y) − T (y)k ≤
≤ kT (x) − Pn (x)k + kPn (x) − Pn (y)k + kPn (y) − T (y)k ≤
≤ 1/n + kPn (x) − Pn (y)k + 1/n < ε + 2/n
per n sufficientemente grande e kx − yk < δε (x) visto che Pn è continuo in
x. Quindi T è continuo in x e per l’arbitrarietà di x ∈ M è continuo su M .
Inoltre essendo Pn (M ) relativamente compatto ha una 1/n-rete finita, quindi
kT (x) − yi k ≤ kPn (x) − T (x)k + kPn (x) − yi k ≤ 1/n + 1/n = 2/n
cioè T (M ) ha una 2/n-rete finita, quindi è relativamente compatto poiché n è
arbitrario; dunque T è compatto.
2.2
Il Teorema di Schauder
Esistono differenti versioni del Teorema di Schauder, sia come dirette
generalizzazioni del Teorema di Brouwer (come il secondo enunciato che
presenteremo), sia in una forma più utile per le applicazioni (è il caso del primo
enunciato), come vedremo nel capitolo successivo.
Teorema 2.2.1 (Schauder, 1930). Sia X uno spazio di Banach, M ⊆ X chiuso,
limitato e convesso. Sia T : M → M un operatore compatto. Allora T ha un punto
fisso.
Dimostrazione. Poiché ogni spazio di Banach complesso può essere visto come un
Banach reale, di seguito supporremo che X è uno spazio di Banach reale. Scegliamo
2.2 Il Teorema di Schauder
21
yi e Pn come nel teorema di approssimazione. Sia Mn = conv{yi , . . . , yN }. La
convessità di M implica Mn ⊆ conv (T (M )) ⊆ M , e quindi
Pn : Mn → Mn
è continuo.
Inoltre Mn è compatto e convesso, e Mn ⊆ RN (identifichiamo
span{y1 , . . . , yN } con RN ).
Allora per il Teorema di Brouwer esiste un punto
fisso xn = Pn (xn ), con xn ∈ Mn ⊆ M . Poiché T è compatto, {T (xn )} ammette
un’estratta convergente, T (xnk ) → y ∈ M . Abbiamo ky − xnk k = ky − Pnk (xnk )k ≤
ky − T (xnk )k + kT (xnk ) − Pnk (xnk )k. Entrambi i membri a destra convergono
a 0 quando k → ∞. Quindi xnk → y e per continuità y = limk→∞ T (xnk ) =
T (limk→∞ xnk ) = T (y), cioè y è un punto fisso.
Corollario 2.2.2 (Versione alternativa del Teorema di Schauder). Sia X uno spazio
di Banach, K ⊆ X compatto e convesso. Sia T : K → K un operatore continuo.
Allora T ha un punto fisso.
Dimostrazione. Poiché in uno spazio di Hausdorff un sottoinsieme chiuso di un
compatto è compatto, T : K → K è un operatore compatto, quindi vale il Teorema
di Schauder e T ha un punto fisso.
Richiamiamo ora un classico risultato dell’analisi funzionale, che ci servirà per
dimostrare l’equivalenza tra i due enunciati precedenti.
Lemma 2.2.3 (Teorema di Mazur). Sia X uno spazio di Banach, K ⊆ X
sottoinsieme compatto. Allora conv(K) è compatto.
Dimostrazione. È sufficiente mostrare che conv(K) è relativamente compatto. Sia
S
ε > 0 e scegliamo x1 , . . . , xn in K tali che K ⊆ nj=1 B(xj , ε/3). Sia C =
conv{x1 , . . . , xn }. È facile vedere che C è compatto, infatti è l’immagine continua del
S
simplesso standard. Quindi esistono y1 , . . . , ym ∈ C tali che C ⊆ m
i=1 B(yi , ε/3).
Dimostriamo quindi che {yi } è una ε-rete per conv(K). Se w ∈ conv(K), allora
P
esiste z ∈ conv(K) tale che kw − zk < ε/3. Di conseguenza z = lp=1 αp kp , dove
22
2. Il Teorema di Schauder
kp ∈ K, αp ≥ 0 e
Pl
p=1
αp = 1. Per ogni kp , esiste xj(p) tale che kkp − xj(p) k < ε/3.
Dunque,
l
l
l
X
X
X
αp xj(p) = αp (kp − xj(p) ) ≤
αp kkp − xj(p) k < ε/3
z −
p=1
Ma
p=1
p=1
P
l
α
x
∈
C
e
quindi
esiste
y
tale
che
α
x
−
y
i
i < ε/3. Dalla
p=1 p j(p)
p=1 p j(p)
Pl
disuguaglianza triangolare, se w ∈ conv(K), allora
l
l
X
X
kw − yi k ≤ kw − zk + z −
αp xj(p) + αp xj(p) − yi < ε
p=1
cioè conv(K) ⊆
Sm
i=1
p=1
B(yi , ε) e quindi conv(K) è relativamente compatto perché
ε > 0 è arbitrario.
Osservazione 2.2.1. I due enunciati del Teorema di Schauder sono equivalenti.
Che l’enunciato 2.2.1 implichi l’enunciato 2.2.2, come abbiamo visto è banale. Per
il viceversa sfruttiamo il Teorema di Mazur. Sia K = conv (T (M )). K ⊆ M , K è
convesso e, per il Teorema di Mazur, compatto. Inoltre T (K) ⊆ T (M ) ⊆ K, quindi
per il corollario precedente, la restrizione T : K → K ha un punto fisso. Questo
punto fisso è automaticamente un punto fisso per T : M → M .
2.3
Il Lemma di Fan
Nel capitolo precedente abbiamo visto una dimostrazione del Teorema di
Brouwer che utilizza metodi della combinatoria. Per generalizzare il Teorema di
Brouwer seguendo lo stesso approccio abbiamo bisogno di un risultato che estenda
opportunamente il Lemma KKM. Iniziamo con una definizione.
Definizione 2.3.1. Uno spazio vettoriale topologico X è uno spazio vettoriale su K
(K = C o K = R nel seguito) con una topologia tale che rispetto ad essa
(i) l’applicazione di X × X → X definita da (x, y) 7→ x + y è continua;
(ii) l’applicazione di K × X → X definita da (α, x) 7→ αx è continua.
2.3 Il Lemma di Fan
23
Esempı̂ 2.3.2. RN è uno spazio vettoriale topologico su R; tutti gli spazi normati
(e quindi spazi di Banach e spazi di Hilbert), con la topologia indotta dalla norma,
sono spazi vettoriali topologici.
Lemma 2.3.1 (Fan). Sia X uno spazio vettoriale topologico di Hausdorff, Y un
sottoinsieme non vuoto di X e F : Y → {M ⊆ X | M 6= ∅, M è chiuso} tale che:
(j) conv{x1 , . . . , xN } ⊆
SN
i=1
F (xi ) per ogni {x1 , . . . , xN } ⊆ Y ,
(jj) esiste x̄ ∈ Y t.c. F (x̄) è compatto.
Allora
T
x∈Y
F (x) 6= ∅.
Osservazione 2.3.3. Notiamo che il Lemma KKM è un caso particolare del Lemma
di Fan, dove X = RN , Y = {x0 , . . . , xN } e F è l’applicazione che manda xi in Fi (in
questo caso la condizione (jj) non è necessaria, poiché lavoriamo solo su S = conv Y ).
Notiamo inoltre che la condizione (j) implica che, per ogni x ∈ Y , x ∈ F (x), e che
S
Y ⊆ x∈Y F (x) (la condizione (i) del lemma KKM ci dice in modo analogo che
S
xi ∈ Fi e che S ⊆ N
i=0 Fi ).
Dimostrazione. L’idea di base della dimostrazione è di usare (jj) per avere a che
fare con un insieme compatto, poi, usando il Teorema 1.4.1, ridursi al caso finito su
cui applicare il Lemma KKM.
(I) Da (jj) e dal Teorema 1.4.1 ciò che rimane da dimostrare è che, per ogni
{x1 , . . . , xN } ⊆ Y , abbiamo
N
\
(F (x̄) ∩ F (xi )) = F (x̄) ∩
i=1
N
\
!
F (xi )
6= ∅.
(2.1)
i=1
(II) In generale gli xi non sono affinemente indipendenti,
quindi non
possiamo applicare direttamente il Lemma KKM ma dobbiamo giungervi
indirettamente.
Poniamo x̄ = x0 e consideriamo da un lato l’insieme
conv{x0 , . . . , xN } e dall’altro l’N-simplesso T = simp{e0 , e1 . . . , eN } dove e0
24
2. Il Teorema di Schauder
è l’origine e {e1 . . . , eN } la base canonica di RN . Consideriamo l’applicazione
φ : T → conv{x0 , . . . , xN } ⊆ X definita da
!
N
N
X
X
φ
αi ei =
αi xi , αi ≥ 0,
i=0
i=0
N
X
αi = 1.
i=0
La φ è continua ma in generale non è iniettiva, essendo gli xi non
necessariamente affinemente indipendenti, quindi la dimensione dell’insieme
convesso conv{x0 , . . . , xN } può essere minore di N . Poniamo Gi = φ−1 (F (xi ))
T
e mostriamo che N
i=0 Gi 6= ∅. La relazione (2.1) seguirà da questo
T poiché
N
per i = 0, . . . , N abbiamo φ(Gi ) = φ(φ−1 (F (xi ))) ⊆ F (xi ) e φ
G
⊆
i
i=0
TN
TN
i=0 φ(Gi ) ⊆
i=0 F (xi ).
(III) Per vedere che
TN
i=0
Gi 6= ∅ dobbiamo solo verificare che i Gi soddisfino
le ipotesi del Lemma KKM. Chiaramente i {Gi } sono chiusi, perché sono
le controimmagini degli insiemi chiusi F (xi ) tramite la funzione continua
S
φ. Inoltre, se I ⊆ {0, . . . , N } allora simp{ei }i∈I ⊆ i∈I Gi ; infatti, se
P
P
z = i∈I λi ei ∈ simp{ei }i∈I , i∈I λi = 1, è un punto qualsiasi in simp{ei }i∈I ,
allora
!
z ∈ φ−1 (φ(z)) = φ−1
X
λ i xi
i∈I
e da (j) segue che
!
φ−1
X
λ i xi
!
⊆ φ−1
i∈I
2.4
Spazi
Vettoriali
[
F (xi )
i∈I
=
[
φ−1 (F (xi )) =
i∈I
Topologici
[
Gi .
i∈I
Localmente
Convessi
Definizione 2.4.1. Una seminorma p su uno spazio vettoriale reale (risp.
complesso) X è una funzione da X in R tale che:
2.4 Spazi Vettoriali Topologici Localmente Convessi
(i) p(x) ≥ 0, ∀x ∈ X,
(ii) p(λx) = |λ|p(x), ∀x ∈ X e ∀λ ∈ R (risp. C),
(iii) p(x + y) ≤ p(x) + p(y), ∀x, y ∈ X.
Definizioni 2.4.2. Sia X uno spazio vettoriale topologico.
• M ⊆ X si dice convesso se per ogni x, y ∈ M , t ∈ [0, 1] risulta tx+(1−t)y ∈ M ;
• M ⊆ X si dice equilibrato se per ogni x ∈ M , |λ| ≤ 1 risulta λx ∈ M ;
• M ⊆ X si dice assolutamente convesso se è convesso ed equilibrato.
Definizione 2.4.3. Uno spazio vettoriale topologico localmente convesso è uno
spazio vettoriale topologico che ha una base {Uj } di intorni dello zero fatta di insiemi
assolutamente convessi.
Esempı̂ 2.4.4. Sono spazi vettoriali topologici localmente convessi gli spazi di
Banach sia dotati della topologia indotta dalla norma, sia dotati della topologia
debole, gli spazi di Banach duali con la topologia *debole e la classe di Schwartz
S(R) = {f ∈ C ∞ (R) | sup(|x|2 + 1)β/2 f (α) (x) < ∞ ∀ α, β ≥ 0},
x
con famiglia di seminorme data da pα,β (f ) = supx (|x|2 + 1)β/2 f (α) (x).
Osservazione 2.4.5. Uno spazio vettoriale topologico è uno spazio vettoriale
localmente convesso se e solo se la sua topologia è definita da una famiglia di
seminorme {pj }j∈I (cioè la sua topologia è la meno fine che rende le seminorme
continue). Infatti, se ha una base di intorni assolutamente convessi, allora la famiglia
di seminorme {pj } è data dal funzionale di Minkowski di Uj , cioè
pj (x) := inf{λ > 0 | x ∈ λUj }.
Viceversa, se X è uno spazio vettoriale topologico localmente convesso con famiglia
di seminorme {pj }, allora per un qualsiasi indice j e r ∈ R, gli insiemi {x ∈ X |
pj (x) < r}, cioè i sottolivelli delle seminorme, formano un sistema di intorni di zero
25
26
2. Il Teorema di Schauder
di insiemi assolutamente convessi.
La topologia definita su uno spazio vettoriale topologico localmente convesso è di
T
Hausdorff se vale i∈I {x | pi (x) = 0} = {0}.
2.5
I Teoremi di Tychonov e di Schauder
Presentiamo ora il Teorema di Tychonov.
Tale risultato è valido in spazi
vettoriali topologici localmente convessi ed estende ulteriormente il Teorema di
Brouwer rispetto al Teorema di Schauder.
Iniziamo con un risultato preliminare.
Lemma 2.5.1. Sia X uno spazio vettoriale topologico di Hausdorff, sia K un
insieme compatto e convesso in X e sia A ⊆ K × K tale che:
(i) A è chiuso;
(ii) per ogni x ∈ K (x, x) ∈ A, i.e. la diagonale ∆ ⊆ A;
(iii) per ogni y ∈ K l’insieme {x ∈ K | (x, y) ∈
/ A} è convesso oppure vuoto.
Allora, esiste y0 ∈ K tale che K × {y0 } ⊂ A.
Dimostrazione. Osserviamo innanzitutto che la condizione (iii) ci dice che
l’intersezione di K × K \ A con i segmenti orizzontali è convessa, oppure essi sono
contenuti in A. Il risultato stesso ci dice che almeno uno di questi segmenti è
contenuto in A.
(I) Poniamo, per x ∈ K, F (x) = {y | (x, y) ∈ A}.
L’insieme F (x) è
l’intersezione del segmento verticale passante per x con A. Se dimostriamo
T
T
che x∈K F (x) 6= ∅ abbiamo terminato, infatti y0 ∈ x∈K F (x) soddisfa la
tesi, poiché se (x, y0 ) ∈ A per ogni x ∈ K allora K × {y0 } ⊂ A.
(II) Per dimostrare che
T
x∈K
F (x) 6= ∅ usiamo il Lemma 2.3.1, verificando che le
ipotesi del lemma siano soddisfatte. Da (ii) sappiamo che F (x) è non vuoto.
Inoltre F (x) è compatto; infatti F (x) = A∩({x}×K) dove A è compatto (è un
2.5 I Teoremi di Tychonov e di Schauder
sottoinsieme chiuso di un insieme compatto, K ×K, in uno spazio di Hausdorff,
X × X) e {x} è chiuso (X è T2 e dunque anche T1). Mostriamo ora che per
S
ogni {x1 , . . . , xm } ⊂ K risulta conv{x1 . . . xm } ⊂ m
i=1 F (xi ). Per assurdo,
supponiamo che esistano {x1 , . . . , xm } ⊂ K tali che esista x̄ ∈ conv{x1 . . . xm }
S
ma x̄ ∈
/ m
/ F (xi ) per x = 1, . . . , m e quindi, per la
i=1 F (xi ). Allora x̄ ∈
condizione (iii) sappiamo che gli (xi , x̄) sono in un insieme convesso. Questo
insieme convesso contiene anche (x̄, x̄) (poiché x̄ ∈ conv{x1 . . . xm }). Allora il
punto (x̄, x̄) non appartiene ad A, e questo contraddice (ii).
Siamo ora in grado di enunciare e dimostrare il Teorema di Tychonov.
Teorema 2.5.2 (Tychonov). Sia X uno spazio vettoriale topologico reale localmente
convesso di Hausdorff, e sia K un insieme non vuoto compatto e convesso in X. Se
f : K → K è una funzione continua, allora f ha almeno un punto fisso.
Dimostrazione.
(I) Sia {pλ }λ∈Λ una famiglia di seminorme continue che definisce
la topologia localmente convessa di X, e poniamo per λ ∈ Λ,
Eλ = {y ∈ K | pλ (y − f (y)) = 0}.
T
(II) Per dimostrare il teorema basta mostrare che λ∈Λ Eλ 6= ∅. Infatti, se
T
ȳ ∈ λ∈Λ Eλ allora per ogni λ ∈ Λ pλ (ȳ − f (ȳ)) = 0 e quindi ȳ − f (ȳ) = 0
perché lo spazio è di Hausdorff, cioè ȳ è un punto fisso di f .
(III) Dalla continuità delle seminorme pλ segue che gli Eλ sono sottoinsiemi chiusi di
T
un insieme compatto K, e quindi per dimostrare che λ∈Λ Eλ 6= ∅ dobbiamo
solamente dimostrare che {Eλ }λ∈Λ ha la proprietà dell’intersezione finita.
T
Siano dunque {λ1 , . . . , λn } ⊂ Λ e mostriamo che ni=1 Eλi 6= ∅, cioè che
Tn
6 ∅, o in altre parole che
i=1 {y ∈ K | pλi (y − f (y)) = 0} =
{y ∈ K |
n
X
i=1
pλi (y − f (y)) = 0} =
6 ∅.
27
28
2. Il Teorema di Schauder
(IV) Poniamo A = {(x, y) ∈ K × K |
Pn
i=1
pλi (x − f (y)) ≥
Pn
i=1
pλi (y − f (y))}
e mostriamo che A soddisfa le ipotesi del Lemma 2.5.1. Fatto ciò abbiamo
concluso, dato che per il Lemma 2.5.1 esiste y0 tale che per ogni x ∈ K,
P
P
(x, y0 ) ∈ A i.e. ni=1 pλi (x − f (y0 )) ≥ ni=1 pλi (y0 − f (y0 )), per ogni x in K e
dunque, ponendo x = f (y0 ), si ha
0=
n
X
pλi (f (y0 ) − f (y0 )) ≥
i=1
e quindi y0 ∈
Tn
i=1
n
X
pλi (y0 − f (y0 )) ≥ 0
i=1
Eλi .
(V) È ovvio che (x, x) ∈ A e che, dalla continuità di f e delle pλ , A è chiuso in
K × K: abbiamo provato che (i) e (ii) sono dunque soddisfatte. Per vedere
(iii), fissiamo y ∈ K e mostriamo che l’insieme {x ∈ K | (x, y) ∈
/ A} =
Pn
Pn
{x ∈ K | i=1 pλi (x − f (y)) < i=1 pλi (y − f (y))} è convesso oppure vuoto.
Supponiamo allora che contenga almeno due punti, cioè
n
X
pλi (xk − f (y)) <
n
X
pλi (y − f (y))
i=1
i=1
con k = 1, 2, x1 6= x2 e proviamo che
n
X
pλi (ϑx1 + (1 − ϑ)x2 − f (y)) <
i=1
n
X
pλi (y − f (y))
i=1
per ogni ϑ ∈ [0, 1]. Questo segue immediatamente dalle disuguaglianze:
n
X
pλi (ϑx1 +(1−ϑ)x2 −f (y)) =
i=1
n
X
pλi (ϑx1 +(1−ϑ)x2 −ϑf (y)−(1−ϑ)f (y)) ≤
i=1
≤
n
X
ϑpλi (x1 − f (y)) +
i=1
<
n
X
i=1
n
X
(1 − ϑ)pλi (x2 − f (y)) <
i=1
n
n
X
X
ϑpλi (y − f (y)) +
(1 − ϑ)pλi (y − f (y)) =
pλi (y − f (y)).
i=1
i=1
2.5 I Teoremi di Tychonov e di Schauder
Quando X è uno spazio di Banach il Teorema di Tychonov si riduce al Corollario
2.2.2. In base all’Osservazione 2.2.1, otteniamo dunque
Corollario 2.5.3 (Schauder). Sia X uno spazio di Banach, M ⊆ X chiuso, limitato
e convesso. Sia T : M → M un operatore compatto. Allora T ha un punto fisso.
29
30
2. Il Teorema di Schauder
Capitolo 3
Applicazioni
3.1
Il Teorema della Curva di Jordan
Definizione 3.1.1. L’immagine omemorfa di un intervallo chiuso [a, b] in RN è detto
un arco e l’immagine omemorfa di una circonferenza è detta una curva di Jordan.
Un classico teorema di topologia è il Teorema della curva di Jordan; nonostante
la semplicità del risultato, dimostrato rigorosamente per la prima volta nel 1905 da
Veblen, tutte le sue dimostrazioni, seppur elementari sono molto lunghe e articolate.
La dimostrazione qui data riprende quella data da Moise (trasparente e intuitiva
nonostante la lunghezza) eliminandone le parti più laboriose grazie al Teorema di
Brouwer.
Teorema 3.1.1 (Teorema della curva di Jordan). Il complementare in R2 di una
curva di Jordan J ha due componenti connesse, una limitata e una illimitata, ognuna
delle quali ha J come frontiera.
Osservazione 3.1.2. Iniziamo con due semplici osservazioni:
1. R2 \ J ha esattamente una componente illimitata.
2. Ogni componente di R2 \ J è connessa per archi e aperta.
La (1) segue dalla limitatezza di J, la (2) dalla locale connessione per archi degli
aperti di R2 e dal fatto che J ⊆ R2 è un sottoinsieme chiuso.
31
32
3. Applicazioni
Lemma 3.1.2. Se R2 \ J è sconnesso, allora ogni sua componente connessa ha J
come frontiera.
Dimostrazione.
(I) Per ipotesi R2 \ J ha almeno due componenti connesse. Sia
U una componente qualsiasi. Poiché ogni altra componente W è disgiunta
da U e aperta, W non contiene nessun punto di U e quindi nessun punto di
∂U = U ∩ U c . Allora ∂U ⊆ J perché W è arbitraria.
(II) Supponiamo ∂U 6= J. Allora esiste una arco A ⊂ J tale che ∂U ⊆ A.
Vogliamo vedere che questa ipotesi porta ad una contraddizione. Per ipotesi
e dall’Osservazione 3.1.2, R2 \ J ha almeno una componente limitata. Sia p
un punto in questa componente. Se U stesso è limitato prendiamo p ∈ U . Sia
D un disco chiuso di raggio σ > 0 sufficientemente grande, centrato in p, da
contenere J al suo interno. Allora ∂D è contenuto nella componente illimitata
di R2 \ J, perché ∂U ⊆ J ⊆ D. Poiché l’arco A è omeomorfo all’intervallo
[0, 1], l’identità su A ha un’estensione continua r : D → A per il Teorema 1.1.2.
Definiamo q : D → D \ {p} nel modo seguente:
se U è limitato,
r(z) se z ∈ U ,
q(z) =
z
se z ∈ U c .
se invece U è illimitato,
q(z) =
z
se x ∈ U ,
r(z) se x ∈ U c .
Essendo ∂U ⊆ A, l’intersezione dei due chiusi U e U c sta in A, sul quale r è
l’identità. Allora q è ben definita e continua. Notiamo che q(z) = z se z ∈ ∂D.
z−p
Sia s : D \ {p} → ∂D la proiezione naturale z 7→ p + σ |z−p|
e t : ∂D → ∂D la
mappa antipodale. Allora t ◦ s ◦ q : D → ∂D ⊆ D è continua e non ha punti
fissi (perché su ∂D è la mappa antipodale). Questo contraddice il Teorema di
Brouwer.
3.1 Il Teorema della Curva di Jordan
33
Osservazione 3.1.3. Osserviamo che questa dimostrazione contiene implicitamente
il fatto che nessun arco separa R2 , lemma spesso usato per dimostrare il Teorema
della curva di Jordan.
Definizione 3.1.4. Dati a, b, c, d ∈ R, con a < b, c < d, sia R(a, b; c, d) = {(x, y) ∈
R2 | a ≤ x ≤ b, c ≤ y ≤ d}, cioè è il rettangolo [a, b] × [c, d].
Lemma 3.1.3. Siano α(t) = (x(t), y(t)) e β(t) = (u(t), v(t)) con t ∈ [−1, 1]
cammini continui in R(a, b; c, d) che soddisfano
x(−1) = a,
x(1) = b,
v(−1) = c,
v(1) = d.
Allora i due cammini si incontrano, i.e. α(s) = β(t) per qualche s, t ∈ [−1, 1].
Dimostrazione. Supponiamo α(s) 6= β(t) per ogni s, t ∈ [−1, 1]. Sia N (s, t) =
max{|x(s) − u(t)|, |y(s) − v(t)|}.
Allora N (s, t) 6= 0 per ogni s, t.
Definiamo
un’applicazione continua F : R(−1, 1; −1, 1) → R(−1, 1; −1, 1),
u(t) − x(s) y(s) − v(t)
F (s, t) =
,
.
N (s, t)
N (s, t)
L’immagine di F è contenuta nel bordo del rettangolo grazie alla definizione di
N . Vogliamo vedere che F non ha punti fissi, per ottenere una contraddizione al
Teorema di Brouwer. Supponiamo F (s0 , t0 ) = (s0 , t0 ). Per quanto appena detto
o |s0 | = 1 o |t0 | = 1. Supponiamo s0 = −1. Per ipotesi la prima coordinata di
F (−1, t0 ) è non negativa, cioè
u(t0 )−a
N (−1,t0 )
≥ 0 e quindi è diversa da s0 . Procedendo
analogamente negli altri tre casi, si vede che F non ha punti fissi, il che contraddice
il Teorema di Brouwer.
Dimostrazione del Teorema 3.1.1. Grazie al Lemma 3.1.2 è sufficiente dimostrare
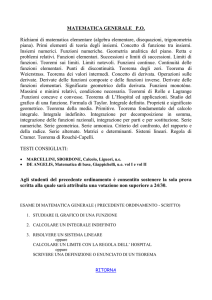
che R2 \ J ha un’unica componente connessa limitata.
(I) Vogliamo scegliere un certo punto z0 ∈ R2 \ J. Poiché J è compatto, esistono
a, b ∈ J tale che la distanza ka − bk è massima. Assumiamo a = (−1, 0) e
b = (1, 0) a meno di rotazione, traslazione o dilatazione. Allora il rettangolo
R(−1, 1; −2, 2) contiene J e il suo bordo Γ interseca J esattamente nei due
34
3. Applicazioni
punti a e b.
Sia n il punto medio del segmento orizzontale superiore di
R(−1, 1; −2, 2) e s quello del segmento orizzontale inferiore, i.e. n = (0, 2) e
s = (0, −2). Il segmento ns interseca J per il Lemma 3.1.3. Sia l il punto con
ordinata massima in ns ∩ J. I punti a e b dividono J in due archi, denotiamo
con con Jn quello che contiente l, con Js l’altro. Sia m il punto con ordinata
minima in Jn ∩ ns (magari m = l). Allora il segmento ms interseca Js ,
c + ms, dove lm
c è il sottoarco di Jn con estremi l
altrimenti il cammino nl + lm
e m, non incontrerebbe Js , contraddicendo il Lemma 3.1.3. Siano p e q i punti
con ordinata massima e minima, rispettivamente, in Js ∩ ms. Infine, sia z0 il
punto medio del segmento mp.
n
l
Jn
m
a
z
b
0
p
w
Js
q
s
(II) Vogliamo ora dimostrare che la componente U che contiene z0 è limitata.
Supponiamo allora che U sia illimitata e vogliamo arrivare ad una
contraddizione. Poiché U è connessa per archi esiste un cammino α in U
3.2 Punti fissi per multifunzioni
da z0 a un punto esterno a R(−1, 1; −2, 2). Sia w il primo punto in cui α
interseca Γ (bordo di R(−1, 1; −2, 2)); ovviamente w 6= a e w 6= b. Chiamiamo
αw la parte di α che va da z0 a w. Se w è nella metà inferiore di Γ, possiamo
trovare un cammino w
cs in Γ da w a s che non contiene né a né b. Consideriamo
c + mz0 + αw + w
ora il cammino nl + lm
cs. Questo cammino non interseca Js ,
contraddicendo il Lemma 3.1.3. Analogamente, se w è nella metà superiore di
Γ, il cammino sz0 + αw + wn,
c dove wn
c è il cammino più corto in Γ da w a n,
non interseca Jn . La contraddizione mostra che U è una componente limitata.
(III) Vogliamo infine dimostrare che non esistono altre componenti limitate di
R2 \ J. Supponiamo che ne esista un’altra, W 6= U . Chiaramente W ⊆
c + mp + pq
R(−1, 1; −2, 2). Denotiamo con β il cammino nl + lm
b + qs, dove pq
b
è il sottoarco di Js da p a q. Come si può facilmente verificare, β non contiene
punti di W . Poiché a e b non appartengono a β, esistono due loro intorni,
Va e Vb rispettivamente, tali che nessuno dei due contiene punti di β. Dal
Lemma 3.1.2, a e b sono nella chiusura di W , e quindi esistono a1 ∈ W ∩ Va
e b1 ∈ W ∩ Vb . Dato che W è connesso, sia ad
1 b1 un cammino da a1 a b1 in
W . Allora il cammino aa1 + ad
1 b1 + b1 b non interseca β. Questo contraddice il
Lemma 3.1.3 e conclude la dimostrazione.
3.2
Punti fissi per multifunzioni
3.2.1
Preliminari sulle multifunzioni
Introduciamo innanzitutto alcune notazioni.
Notazioni 3.2.1. Se X e Y sono spazi vettoriali topologici non vuoti, poniamo:
2Y• = {M ∈ P(Y ) | M 6= ∅},
2Yc = {M ∈ P(Y ) | M è chiuso},
35
36
3. Applicazioni
2Yk = {M ∈ P(Y ) | M è convesso},
2Y•c = 2Y• ∩ 2Yc , 2Y•k = 2Y• ∩ 2Yk , 2Y•ck = 2Y•c ∩ 2Y•k .
Se f : X → 2Y• è un’applicazione, definiamo GXY (f ) = {(x, y) ∈ X × Y | y ∈
f (x)} il grafico di f .
dati
È ora necessario dotare questi spazi di una topologia, cosa che ci permetterà di
parlare, in qualche senso che chiariremo a breve, di continuità.
Definizione 3.2.2. Sia Y uno spazio topologico. La topologia di 2Y• , generata dalla
famiglia O + di insiemi del tipo U + = {T ∈ 2Y• | T ⊂ U } = 2U• , dove U è un aperto
di Y , è detta la topologia superiore semifinita di Vietoris ed è denotata da V + .
Definizione 3.2.3. Siano X, Y spazi topologici e sia f : X → 2Y• . L’applicazione f
è detta essere semicontinua superiormente se è continua nella senso della topologia
V +.
Definizione 3.2.4. Siano X, Y due spazi topologici e f : X → 2Y• . L’applicazione
f è detta essere chiusa se GXY (f ) è chiuso in X × Y .
Enunciamo ora alcuni risultati che ci saranno utili per provare il Teorema di
Kakutani.
Lemma 3.2.1. Siano X e Y due spazi topologici compatti di Hausdorff e f : X →
2Y•c . Allora f è semicontinua superiormente se e solo se f è chiusa.
Per una dimostrazione di questo risultato rimandiamo a [BC84].
Lemma 3.2.2. Siano X, Y spazi topologici, f : X → 2Y• . Se f è chiusa, allora
xn → x0 , yn → y0 e per ognin yn ∈ f (xn )
implica y0 ∈ f (x0 ).
Dimostrazione. Per ipotesi (xn , yn ) ∈ GXY (f ) per ogni n, ed esdatisendo il grafico
chiuso contiene il limite (x0 , y0 ), ossia y0 ∈ f (x0 ).
3.2 Punti fissi per multifunzioni
3.2.2
Il Teorema di Kakutani
Una conseguenza del Teorema di Brouwer è il Teorema di Kakutani che che ne
rappresenta la naturale estensione al contesto delle multifunzioni.
Analogamente alla dimostrazione del Teorema di Brouwer, premettiamo due lemmi
grazie ai quali saremo in grado di dimostrare il teorema.
Definizione 3.2.5. Sia Y insieme non vuoto, f : Y → 2Y• una multifunzione. Un
punto y ∈ Y è un punto fisso per f se y ∈ f (y).
Lemma 3.2.3. Sui compatti la proprietà di punto fisso nel caso di multifunzioni
e compatti in Y spazio vettoriale
è conservata dalle retrazioni. Dati cioè K e K
topologico, se ogni multifunzione semicontinua superiormente f : K → 2K
•ck ha un
e è una retrazione di K, allora ogni multifunzione semicontinua
punto fisso e K
e → 2Ke ha un punto fisso.
superiormente φ : K
•ck
e retrazione e φ : K
e → 2Ke resta ben definita la
Dimostrazione. Data r : K → K
•ck
multifunzione f = i ◦ φ ◦ r : K → 2K
•ck , che è banalmente semicontinua superiormente
e quindi, per ipotesi, ha un punto fisso x̄ ∈ K. Poiché i è l’inclusione di insiemi,
e e che x̄ ∈ (φ ◦ r)(x̄). Siccome x̄ ∈ K
e si ha
possiamo dire che x̄ è un punto di K
r(x̄) = x̄, e dunque x̄ ∈ φ(x̄).
Lemma 3.2.4 (Teorema di Kakutani per i simplessi). Sia simp{x0 , . . . , xN } un Nsimplesso di RN . Se f : S → 2S•ck è semicontinua superiormente, allora ha un punto
fisso.
Dimostrazione. Similmente alla dimostrazione del Lemma KKM, useremo il fatto
che per ogni l ≥ 1 esiste una suddivisione di S in simplessi Σl tale che diam(Σl ) ≤
1/l.
(I) Supponiamo di avere una successione di tali suddivisioni in simplessi di S e
definiamo, per ogni l ≥ 1, un’applicazione f (l) : S → S costruita in modo
che per ogni vertice v (l) di Σl il punto f (l) (v (l) ) sia appartenente a f (v (l) ), e
facciamo successivamente un’estensione lineare in ogni simplesso di Σl . Le f (l)
cosı̀ definite sono continue, e dunque, per il Teorema di Brouwer, segue che
per ogni l ≥ 1 esiste x̄(l) ∈ S tale che f (l) (x̄(l) ) = x̄(l) .
37
38
3. Applicazioni
(II) Siccome Σl è una suddivisione di S possiamo supporre che x̄(l)
(l)
(l)
simp{vj0 , . . . , vjN }
x̄
∈
e che
(l)
=
N
X
(l) (l)
αji vji ,
con
(l)
αji
≥0e
i=0
N
X
(l)
αji = 1;
i=0
Dalla linearità di f in ogni simplesso Σl segue che
(l)
(l)
f (x̄ ) =
N
X
(l)
(l)
αji f (l) (vji ).
i=0
Eventualmente passando a sottosuccessioni (che denoteremo allo stesso modo),
possiamo assumere che
lim
l→∞
(l)
vji
= vi
lim x̄
(l)
l→∞
= x̄
lim
l→∞
(l)
αji
= αi
αi ≥ 0 e
N
X
αi = 1.
i=0
Inoltre, liml→∞ diam(Σl ) = 0 e quindi abbiamo vi = x̄, per i = 0, . . . , m e
(l)
(l)
quindi liml→∞ vji = x̄. Siccome a meno di estratte esistono liml→∞ f (l) (vji ) =
ti , abbiamo anche
x̄ = lim x̄(l) = lim f (l) (x̄(l) ) = lim
l→∞
l→∞
l→∞
N
X
i=0
(l)
(l)
αji f (l) (vji ) =
N
X
αi ti .
i=0
(II) Dobbiamo mostrare che x̄ è un punto fisso di f , mostrando che tji ∈ f (x̄) e
usando il fatto che f (x̄) è convesso. Dalla definizione di f (l) abbiamo che per
(l) (l)
costruzione vji , f (l) (vji ) ∈ GSS (f ). Poiché f è semicontinua superiormente,
grazie ai Lemmi 3.2.1 e 3.2.2, abbiamo (x̄, ti ) ∈ GSS (f ) e quindi x̄ ∈ f (x̄)
perché f (x̄) è convesso.
Teorema 3.2.5 (Kakutani). Sia K un insieme convesso compatto e non vuoto di
RN . Se f : K → 2K
•ck è una multifunzione semicontinua superiormente, allora f ha
un punto fisso, i.e. esiste x̄ ∈ K tale che x̄ ∈ f (x̄).
3.3 Equazioni differenziali ordinarie
Dimostrazione. Essendo K compatto in RN , è limitato, ed è dunque contenuto in
un qualche N-simplesso S. Dal Lemma 3.2.4 sappiamo che S ha la proprietà di
punto fisso per multifunzioni f : S → 2S•ck semicontinue superiormente. Essendo
K compatto e convesso è un retratto di S grazie al Lemma 1.7.1, e dunque per il
Lemma 3.2.3 anche su K vale la proprietà di punto fisso.
3.3
Equazioni differenziali ordinarie
Presentiamo innanzitutto un risultato preliminare, il Teorema di Ascoli-Arzelà,
che ci servirà per dimostrare la compattezza di un operatore integrale su spazi di
funzioni continue.
3.3.1
Il Teorema di Ascoli-Arzelà
Definizione 3.3.1. Sia X uno spazio metrico, Y uno spazio di Banach. H ⊆
C (X, Y ) si dice (uniformemente) equicontinuo se per ogni ε > 0 esiste un δ > 0 tale
che per ogni f ∈ H, d(x, y) < δ implica kf (x) − f (y)k < ε.
Teorema 3.3.1 (Ascoli-Arzelà). Sia X spazio metrico compatto, Y uno spazio
di Banach e C (X, Y ) = {f : X → Y | f continua } lo spazio di Banach con
kf k = supx∈X kf (x)k. Un sottoinsieme H ⊆ C (X, Y ) è relativamente compatto
se e solo se:
(i) H è equicontinuo,
(ii) ∀ x ∈ X, H(x) = {f (x) | f ∈ H} è relativamente compatto in Y (i.e. H è
puntualmente relativamente compatto).
Dimostrazione.
(I) Dimostriamo che se H ⊆ C (X, Y ) è relativamente compatto,
allora valgono (i ) e (ii ). La (ii ) segue dal fatto che ϕx : C (X, Y ) → Y , definita
da ϕx (f ) = f (x), è continua per ogni x ∈ X. Infatti, poiché l’immagine di
insiemi (relativamente) compatti tramite funzioni continue è (relativamente)
compatta, ϕx (H) = H(x) è relativamente compatto. Per vedere (i) sia ε > 0.
39
40
3. Applicazioni
Poiché H è compatto, esiste una ε/3-rete finita B(fi , ε/3) per H. Essendo
le fi uniformemente continue (continue su un compatto), per ogni i esiste δi
tale che kfi (x) − fi (y)k < ε/3 se d(x, y) < δi . Sia δ = mini δi . Allora se
f ∈ H e d(x, y) < δ, si ha, scelto i tale che f ∈ B(fi , ε/3), kf (x) − f (y)k ≤
kf (x) − fi (x)k + kfi (x) − fi (y)k + kfi (y) − f (y)k < ε/3 + ε/3 + ε/3 = ε, e
dunque vale (i ).
(II) Viceversa, dimostriamo ora che (i ) e (ii ) implicano che H sia relativamente
compatto in C (X, Y ).
Per dimostrare che H è compatto è sufficiente
dimostrare che ogni successione in H ammette una sottosuccessione
convergente in C (X, Y ).
(II-A) Sia {fn } una successione in H. Per ogni ε > 0, esiste una sottosuccessione
(ε)
(ε)
(ε)
{fn } tale che kfn − fm k < ε se n, m ≥ 1. Infatti, fissato ε > 0,
dall’equicontinuità segue che per ogni x ∈ X esiste Ux intorno aperto di
x tale che kfn (u) − fn (v)k < ε/3 per u, v ∈ Ux . La compattezza di X
implica l’esistenza di un numero finito di punti x1 , . . . , xk tali che X =
Ux1 ∪ · · · ∪ Uxk , Poiché ogni H(xi ) è relativamente compatto in Y , esiste
una sottosuccessione {fnk }, data in modo tale che {fnk (xi )} converge per
ogni i; tale sottosuccessione si costruisce prendendo una sottosuccessione
convergente in x1 , di questa una sottosuccessione convergente in x2 e cosı̀
via, in un numero finito di passi. Dalla convergenza di {fnk } sugli xi segue
l’esistenza di Kε tale che kfnk0 (xi )−fnk00 (xi )k < ε/3 se k 0 , k 00 ≥ Kε . Siano
ora u ∈ X e iu ∈ {1, . . . , k} tale che u ∈ Uxiu . Per ogni k 0 , k 00 ≥ Kε si
ha kfnk0 (u) − fnk00 (u)k ≤ kfnk0 (u) − fnk0 (xiu )k + kfnk0 (xiu ) − fnk00 (xiu )k +
kfnk00 (xiu ) − fnk00 (u)k < ε/3 + ε/3 + ε/3 = ε. L’affermazione dunque è
(ε)
vera prendendo {fn } uguale a {fnk }k≥Kε .
(II-B) Consideriamo ora una qualsiasi successione {fn } in H e costruiamo
una sua sottosuccessione convergente in C (X, Y ). Applichiamo quanto
appena dimostrato a {fn } con ε = 1. Otteniamo una sottosuccessione
(1)
(1)
(1)
{fn } tale che kfn − fm k < 1. Scegliamo ora ε = 1/2, ottendendo
(1)
(1/2)
da {fn } una sottosuccessione {fn
(1/2)
} tale che kfn
(1/2)
− fm
k < 1/2
3.3 Equazioni differenziali ordinarie
41
e procediamo successivamente per ogni ε = 1/k. Definiamo quindi una
(1/k)
sottosuccessione {f˜k } di {fn }, ponendo f˜k = fk , k ≥ 1. È evidente
che {f˜k } è una sottosuccessione di {fn } e che kf˜k0 − f˜k00 k < 1/k, se k 0 ≥ k
e k 00 ≥ k. Allora {f˜k } è di Cauchy e dunque, essendo C (X, Y ) uno spazio
di Banach, è una sottosuccessione convergente.
3.3.2
Il Teorema di esistenza di Peano
Consideriamo il problema di Cauchy
(
x0 (t) = f (t, x(t))
(3.1)
x(t0 ) = y0
per x : [t0 − c, t0 + c] → Y , dove Y è uno spazio di Banach e y0 ∈ Y . Supponiamo che
f sia compatta, invece dell’ipotesi di lipschitzianità del classico Teorema di esistenza
e unicità di Picard-Lindelöf.
Osservazione 3.3.2. Per (3.1) non c’è in generale unicità, ad esempio se Y = R il
problema
(
p
x0 (t) = 2 |x(t)|
x(0) = 0
ammette infinite soluzioni. Infatti
xa (t) =
0
se t ≤ a
(t − a)2
se t ≥ a
è soluzione per ogni a ≥ 0.
Nell’ipotesi di sola continuità è valido un risultato di esistenza, dovuto a Peano,
almeno nel caso che Y abbia dimensione finita.
Ne presentiamo una versione
generalizzata a spazi di dimensione infinita.
Teorema 3.3.2 (Peano). Siano t0 ∈ R, y0 ∈ Y punti assegnati e Qab = {(t, y) ∈
R × Y | |t − t0 | ≤ a, ky − y0 k ≤ b} con 0 < a, b < ∞ numeri fissati. Supponiamo
42
3. Applicazioni
f : Qab → Y compatta e limitata, kf (t, y)k ≤ K, ∀(t, y) ∈ Qab , K > 0. Sia
c = min{a, b/K}. Allora il problema di Cauchy in (3.1) ha almeno una soluzione
in C 1 ([t0 − c, t0 + c]; Y ).
(I) Sia X = C([t0 − c, t0 + c]; Y ) spazio di Banach con norma
Dimostrazione.
kxkX = maxt∈[t0 −c,t0 +c] kx(t)k, e M = {x ∈ X | kx − y0 kX ≤ b}. Come per il
Teorema di Picard-Lindelöf, consideriamo l’equivalente equazione integrale di
Volterra
Z
t
f (s, x(s)) ds
x(t) = y0 +
t0
Sia z(t) la funzione definita dal secondo membro dell’equazione e poniamo
T (x) = z. Allora il Problema 3.1 può essere riscritto come un problema di
punto fisso, x = T (x), con x ∈ M ⊆ X. Poiché kx − y0 kX ≤ b, abbiamo
kz − y0 kX ≤ cK ≤ b e quindi T (M ) ⊆ M e kz(t1 ) − z(t2 )k ≤ K|t1 − t2 |, per
ogni t1 , t2 ∈ [t0 − c, t0 + c], cioè z è (uniformemente) continua e T (M ) è un
insieme equicontinuo in X. Se poniamo
N (t) = y0 + (t − t0 )conv{f (s, x(s)) | s ∈ [t0 − c, t0 + c]},
allora z(t) ∈ N (t), perché l’integrale è il limite delle somme di Riemann.
(II) L’insieme T (M ) è relativamente compatto in X. Abbiamo visto che le funzioni
z ∈ T (M ) sono (uniformemente) equicontinue e che per ogni t ∈ [t0 − c, t0 + c]
appartengono a N (t), che per il Teorema di Mazur e l’ipotesi su f , è compatto.
Allora, per il Teorema di Ascoli-Arzelà T (M ) è relativamente compatto.
(III) L’operatore T è continuo su M . Infatti, sia xn → x in X. Per la definzione di
T , abbiamo
kT (xn ) − T (x)kX ≤ c
sup
kf (s, xn (s)) − f (s, x(s))k → 0, se n → ∞.
s∈[t0 −c,t0 +c]
Infatti, se cosı̀ non fosse, esisterebbe un ε0 > 0 e, a meno di estratte, una
successione {sn } in [t0 − c, t0 + c] tale che kf (sn , xn (sn )) − f (sn , x(sn ))k ≥ ε0 .
3.4 Sottospazi invarianti e Teorema di Lomonosov
43
Inoltre esiste una sottosuccessione, che denotiamo ancora con {sn }, e un s0
tale che sn → s0 se n → ∞, e
kxn (sn ) − x(s0 )k ≤ kxn (sn ) − x(sn )k + kx(sn ) − x(s0 )k → 0, se n → ∞.
Ma {xn } è uniformente convergente, x è continua e f è continua e quindi
sia f (sn , x(sn )) sia f (sn , xn (sn )) convergono a f (s0 , x(s0 )), che contraddice
l’ipotesi fatta.
(IV) Allora, per il Teorema di Schauder, T ha un punto fisso su M che è quindi
una soluzione continua dell’equazione integrale, e dunque una soluzione C 1 del
Problema 3.1 nell’intervallo [t0 − c, t0 + c].
3.4
Sottospazi invarianti e Teorema di Lomonosov
Un’altra importante applicazione del Teorema di Schauder è l’esistenza di
sottospazi invarianti per certi operatori continui su spazi di Banach. Iniziamo con
qualche definizione.
Definizione 3.4.1. X spazio di Banach complesso, T ∈ L (X). Un sottospazio
invariante per T è un sottospazio vettoriale chiuso M di X tale che T x ∈ M ogni
volta che x ∈ M . M è non banale se M 6= ∅, X. Denotiamo con Lat T la collezione
di tutti i sottospazi invarianti per T , i.e. Lat T = {M ⊆ X | T (M ) ⊆ M }. Se
T
A ⊆ L (X), Lat A = {Lat T | T ∈ A} = {M ⊆ X | T (M ) ⊆ M ∀T ∈ A}.
Proposizione 3.4.1.
(a) Se M1 ,
M2
∈
Lat T ,
allora M1 ∨ M2
=
span(M1 ∪ M2 ) = span(M1 ) ⊕ span(M2 ) e M1 ∧ M2 = M1 ∩ M2 ∈ Lat T .
W
S
L
(b) Se {Mi | i ∈ I} ⊆ Lat T , allora {Mi } = span( i∈I Mi ) =
i Mi e
V
T
{Mi } = i∈I Mi appartengono a Lat T .
Viene naturale chiedersi quali ipotesi vadano fatte su un dato operatore affinché
esistano sottospazi invarianti non banali. Read, nel 1984 mostrò l’esistenza di uno
44
3. Applicazioni
spazio di Banach e di un operatore su questo spazio privo di sottospazi invarianti non
banali. Prima di lui, Enflo ottenne lo stesso risultato. In seguito Beauzamy (1985) e
Read (1986) raffinarono questi risultati, non rispondendo comunque alla domanda.
Quali spazi di Banach hanno la proprietà che esiste un operatore continuo privo di
sottospazi invarianti non banali? Se X è riflessivo, è vero che Lat T è non banale
per ogni T ∈ L (X)? La domanda rimane aperta anche se si considerano spazi di
Hilbert. In ogni caso per alcune classi di operatori è possibile dare una risposta;
mostrando ad esempio che ogni operatore compatto ha sottospazi invarianti non
banali.
Esempı̂ 3.4.2.
1) Se X è uno spazio di Banach complesso finito dimensionale
e T ∈ L (X), allora Lat T è non banale. Infatti sia X = Cd e sia T una
matrice. Allora p(z) = det(T − zI) è un polinomio di grado d. Sia α una
radice di p; allora det(T − αI) = 0 e quindi (T − αI) non è invertibile.
Allora N = ker(T − αI) 6= {0}. Sia M ⊆ N , M 6= {0}. Se x ∈ M , allora
T x = αx ∈ M , e quindi M ∈ Lat T .
2) Se T = 01 −1
su R2 , allora Lat T è banale. Infatti, se cosı̀ non fosse esisterebbe
0
uno spazio uno dimensionale M in Lat T . Sia M = {αe | α ∈ R}. Poiché M ∈
Lat T , T e = λe per qualche λ ∈ R. Abbiamo T 2 e = T (T e)) = λT e = λ2 e.
Ma T 2 = −I, quindi −e = λ2 e, cioè λ2 = −1, il che è impossibile se λ è reale.
3) Se S : `p → `p è definito da S(α1 , α2 , . . . ) = (0, α1 , α2 , . . . ) e Mn = {x ∈ `p |
xk = 0 1 ≤ k ≤ n}, allora Mn ∈ Lat S.
Il risultato che segue è dovuto a Lomonosov (1973). Quando apparve provocò
grande entusiasmo, sia per la forza delle sue conclusioni, sia per la semplicità della
sua dimostrazione, che usa il Teorema di punto fisso di Schauder.
Definizione 3.4.3. Se T ∈ L (X), allora un sottospazio iperinvariante per T è un
sottospazio M ⊆ X tale che A(M ) ⊆ M per ogni operatore A nel commutante di
T , (T )0 , i.e. A(M ) ⊆ M per ogni A ∈ L (X) tale che AT = T A.
Osservazione 3.4.4. Ovviamente T ∈ (T )0 , per ogni T ∈ L (X). Dunque ogni
sottospazio iperinvariante per T è anche un sottospazio invariante per T .
3.4 Sottospazi invarianti e Teorema di Lomonosov
Teorema 3.4.2 (Lomonosov). Sia X uno spazio di Banach su C, sia T ∈ L (X),
T 6= λI e tale che T K = KT per qualche operatore compatto non nullo K. Allora
T ha un sottospazio iperinvariante non banale.
Premettiamo il seguente risultato.
Lemma 3.4.3 (Lomonosov). Sia A una sottoalgebra di L (X) tale che I ∈ A e
Lat A = {∅, X}. Sia K : X → X un operatore compatto non banale. Allora esiste
A ∈ A tale che ker(AK − I) 6= {0}.
Dimostrazione. Possiamo assumere che kKk
=
1, infatti essendo A una
sottoalgebra, nel caso che sia kKk =
6 1, l’operatore cercato sarà definito da
e = kKk−1 A.
A
(I) Fissiamo x0 ∈ X tale che kKx0 k > 1 e poniamo S = {x ∈ X | kx − x0 k ≤ 1}.
Possiamo facilmente verificare che 0 ∈
/ S e che 0 ∈
/ K(S), infatti se 0 ∈ S
avremmo kx0 k ≤ 1, il che è assurdo poiché kKk = 1 e kKx0 k > 1;
inoltre, abbiamo kKxk = kK(x − x0 ) + Kx0 k ≥ kKx0 k − kK(x − x0 )k ≥
kKx0 k − kKkkx − x0 k ≥ kKx0 k − 1 > 0, per ogni x ∈ S e quindi 0 ∈
/ K(S).
(II) Se x ∈ X e x 6= 0, {T x | T ∈ A} è un sottospazio invariante per A (perché
A è un’algebra) che contiene un vettore nonnullo x (perché I ∈ A). Allora,
per ipotesi, {T x | T ∈ A} = X. Dal fatto che 0 ∈
/ K(S) sappiamo che che per
ogni y ∈ K(S) esiste T ∈ A tale che kT y − x0 k < 1. Equivalentemente,
K(S) ⊆
[
{y | kT y − x0 k < 1}.
T ∈A
Ma K(S) è compatto, quindi esistono T1 , . . . , Tn ∈ A tali che
K(S) ⊆
n
[
{y | kTi y − x0 k < 1}.
i=1
(III) Per y ∈ K(S) e i = 1, . . . , n, sia ai (y) = max{0, 1 − kTj y − x0 k}. Per quanto
P
detto ni=1 ai (y) > 0 per ogni y ∈ K(S). Siano bi : K(S) → R e ψ : S → X
45
46
3. Applicazioni
definite da:
ai (y)
,
bi (y) = Pn
j=1 aj (y)
ψ(x) =
n
X
bi (Kx)Tj Kx.
i=1
Si può facilmente vedere che ai : K(S) → [0, 1] è una funzione continua, e che
dunque lo sono anche bi e ψ.
(IV) Se x ∈ S, allora Kx ∈ K(S); se bi (Kx) > 0, allora ai (Kx) > 0 e quindi
kTj Kx − x0 k < 1, cioè Tj Kx ∈ S ogni volta che bi (Kx) > 0. Poiché S è
P
convesso e ni=1 bi (x) = 1 per ogni x ∈ S, risulta ψ(S) ⊆ S.
S
(V) Notiamo che, essendo Tj K compatto, per ogni j, ni=1 Ti K(S) ha chiusura
S
compatta. Dal Teorema di Mazur (2.2.3) conv( ni=1 Ti K(S)) è compatto.
Ma questo insieme compatto contiene ψ(S) e quindi ψ(S) è compatto, cioè
ψ è compatta. Dal Teorema di punto fisso di Schauder, esiste x1 ∈ S tale
Pn
che ψ(x1 ) = x1 . Sia βi = bi (Kx1 ) e A =
i=1 βi Ti . Allora A ∈ A e
AKx1 = ψ(x1 ) = x1 . Poiché x1 ∈ S, x1 6= 0 e quindi ker(AK − I) 6= {0}.
Dimostrazione Teorema 3.4.2. Sia A = (T )0 , in modo tale che A ⊆ L (X) sia
un’algebra con unità. Vogliamo mostrare che Lat A =
6 {∅, X}.
(I) Se cosı̀ non fosse, il Lemma di Lomonosov implicherebbe l’esistenza di un
operatore A ∈ A tale che N = ker(AK − I) 6= {0}. Ma N ∈ Lat(AK)
perché AK|N è l’operatore identità e AKN = N . Poiché AK è compatto
su X, AK|N = IN è compatto su N e dunque, dal Lemma di Riesz,
segue che dim N < ∞. Poiché AK ∈ A = (T )0 , per ogni x ∈ N si ha
AK(T x) = T (AKx) = T x e quindi T N ⊆ N . Ma dim N < ∞, quindi T |N
deve avere un autovalore λ; allora M = ker(T − λI) 6= {0}, e non essendo T
un multiplo dell’identità M 6= X.
(II) È facile verificare che M è iperinvariante per T , infatti Am = λ−1 Aλm =
λ−1 AT m = λ−1 T Am cioè T (Am) = λ(Am), per ogni m ∈ M e per ogni
3.4 Sottospazi invarianti e Teorema di Lomonosov
A ∈ (T )0 . Quindi Am ∈ M per ogni m ∈ M , cioè A(M ) ⊆ M per ogni
A ∈ (T )0 .
Come semplice conseguenza del Teorema di Lomonosov si ottiene
Corollario 3.4.4 (Aronszajn - Smith, 1954). Se K è un operatore compatto su uno
spazio di Banach su C, allora Lat K è non banale.
Dimostrazione. Se K = 0 o K = λI ogni sottospazio di X è invariante per K.
Altrimenti scegliamo T = K in modo che T K = KT e la tesi segue dal Teorema
3.4.2 e dall’Osservazione 3.4.4.
47
48
Bibliografia
[BC84]
Claudio Baiocchi and Antonio Capelo. Variational and quasivariational
inequalities: applications to free boundary problems. Wiley, Chichester,
1984.
[Bou74]
Nicolas Bourbaki. Topologie générale. Chapitres 5 à 10. Hermann, Paris,
1974.
[Bre83]
Haı̈m Brezis. Analyse fonctionnelle : thèorie et application. Éditions
Masson, Paris, 1983.
[Con85]
John B. Conway. A Course in Functional Analysis. Springer, New York,
1985.
[DS58]
Nelson Dunford and Jacob T. Schwartz. Linear Operators, Part I: General
Theory. Interscience, New York, 1958.
[Hua]
Jonathan Huang. On the Sperner Lemma and its applications. http:
//www.cs.cmu.edu/~jch1/research/old/sperner.pdf.
[Kel55]
John L. Kelley. General Topology. Van Nostrand, New York, 1955.
[KKM29] Bronislaw Knaster, Kazimierz Kuratowski, and Stefan Mazurkiewicz.
Ein Beweis des Fixpunktsatzes für n-dimensionale Simplexe. Fundamenta
Mathematicae, 14:132–137, 1929.
[Mae84]
Ryuji Maehara. The Jordan Curve Theorem via the Brouwer Fixed Point
Theorem. The American Mathematical Monthly, 91(10):641–643, 1984.
49
[PSV78] Livio C. Piccinini, Guido Stampacchia, and Giovanni Vidossich.
Equazioni differenziali ordinarie in RN (problemi e metodi). Liguori,
Napoli, 1978.
[SW70]
Josef Stoer and Christoph Witzgall. Convexity and Optimization in Finite
Dimensions I. Springer, Berlin, 1970.
[Zei86]
Eberhard Zeidler. Nonlinear functional analysis and its applications, Vol.
1: Fixed-point theorems. Springer, New York, 1986.
50
Ringraziamenti
Vorrei ringraziare Paola, Ermanno ed Alessio (o, più in generale, la mia famiglia),
ché vivere con me è davvero difficile; Giovanni, perché non avrei mai potuto sperare
di trovare un compagno di studi cosı̀ perfetto; Vito, Mauro, Ivan, Stefano per tutte
le volte che hanno ascoltato, e spesso risolto, i miei dubbi; Valerio, senza il quale
probabilmente non avrei mai varcato la soglia di questo Dipartimento; Adriano
Pisante, non so come esprimere la stima che ho di lui e la gratitudine che provo;
Marco Isopi, perché “ben poco” è molto di più di quanto mi aspetti dagli esseri
umani; il Castelnuovo, perché qui mi sento a casa; Enrico, Chiara (e chissà quanti
altri), sono loro che mi hanno permesso di non perdere il senno in questi tre anni;
Giulio e Valentina, gli unici che mi sono rimasti amici nonostante mi sia iscritta a
Matematica.
51