5
FORZE
Nozione di Forza
La Forza è un ente, assunto come primitivo, atto a rappresentare l’azione su un
corpo da parte di altri corpi e capace di produrre sul corpo effetti meccanici quali:
1. Variazione dello stato di quiete o di moto
2. Deformazioni
³
´
Postulato 1 Una forza è individuata da un vettore applicato F , P dove P è il
punto di applicazione.
Postulato 2 Composizione e scomposizione delle forze. Se più forze sono applicate allo stesso punto, esse equivalgono ad un unica forza (ovvero ne producono
gli stessi effetti) detta Risultante applicata allo stesso punto. Il vettore Risultante
si ottiene sommando vettorialmente i vettori delle singole forze. Viceversa ad una
forza applicata in un punto P si possono sostituire più forze applicate allo stesso
punto, la cui somma vettoriale sia il vettore della forza sostituita.
Sistemi di Forze
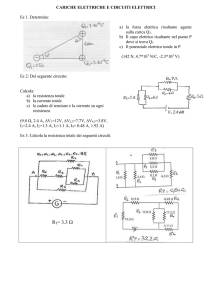
Definizione 1 Si definisce Momento di una Forza applicata in un punto P rispetto
ad un polo O, la seguente quantità
³−−−−→´
MO := P − O ∧ F .
(1)
Osservazione 1 MO ⊥ π, dove π è il piano che contiene O e la retta di applicazione (retta passante per P e parallela ad F .
¯ ¯−−−−→¯ ¯ ¯
¯
¯¯ ¯
¯ ¯
¯
Osservazione 2 ¯MO ¯ = ¯P − O¯ ¯F ¯ sin θ = F b b è il braccio.
6
Osservazione 3 Se la retta d’applicazione passa per il polo O
=⇒ MO = 0.
Osservazione 4 Il momento rispetto ad O non varia se si fa scorrere la forza
lungo la sua retta d’applicazione (non varia il braccio)
=⇒ il momento di una
forza non dipende dal punto di applicazione, ma dalla retta di applicazione. Per
calcolare il momento di una forza si può traslare la forza lungo la sua retta di applicazione. Si definisce Momento di una Forza F rispetto ad un asse a, il prodotto
scalare
Ma := MO × a,
(2)
dove O è un punto dell’asse e a il versore dell’asse.
Il momento di una forza rispetto ad un asse a non dipende dalla scelta del punto
O dell’asse.
−−−−→
Dimostrazione. Sia O0 un altro punto dell’asse a tale che O − O0 = λa. Calcoliamo
h³−−−−→´ ³−−−−→´i
³−−−−→´
³−−−−→´
MO0 := P − O0 ∧ F = P − O + O − O0 ∧ F = MO + O − O0 ∧ F . (3)
Moltiplicando scalarmente per il versore a, otteniamo
i
h³−−−−→´
MO0 × a = MO × a + O − O0 ∧ F × a,
−−−−→
ma O − O0 è parallelo ad a
=⇒
h³−−−−→´
i
O − O0 ∧ F × a = 0
Ma = MO × a = MO0 × a.
(4)
(5)
Consideriamo il piano π passante per P , perpendicolare ad a e scompongo F
in una componente parallela ad a ed una perpendicolare ad a,ovvero F = Fk + F⊥ .
7
Calcoliamo Ma
´i
h³−−−−→´
i
h³−−−−→´ ³
P − Q ∧ F × a = P − Q ∧ Fk + F⊥ × a
h³−−−−→´
i
h³−−−−→´
i
= P − Q ∧ Fk × a + P − Q ∧ F⊥ × a.
Ma =
(6)
Il primo termine si annulla a causa del parallelismo tra Fk e a.
Legge di cambiamento del polo
Ad un corpo sono applicate N forze Fi (i = 1, . . . , N ) nei punti Pi (i = 1, . . . , N ).
La risultante viene definita come
N
P
R=
Fi .
(7)
i=1
R non è un vettore applicato. Definiamo anche il momento risultante rispetto ad un polo O
N ³−
P
−−−→´
MO :=
(8)
Pi − O ∧ Fi .
i=1
Come si modifica MO se cambiamo il polo da O a O0 ?
N ³−−−−→´
N h³−
P
P
−−−→´ ³−−−−→´i
MO0 :=
Pi − O0 ∧ Fi =
Pi − O + O − O0 ∧ Fi
i=1
i=1
³−−−−→´ P
N ³−
N
P
−−−→´
Pi − O ∧ Fi + O − O0 ∧
=
Fi
i=1
i=1
³−−−−→´
³−−−−→´
N ³−
P
−−−→´
0
Pi − O ∧ Fi + O − O ∧ R = MO + R ∧ O0 − O .
=
(9)
i=1
Si può notare l’analogia formale tra la formula dell’atto di moto rototraslatorio e
la legge di cambiamento del polo. Se conosciamo MO e R, possiamo conoscere il
momento rispetto ad un altro polo P , ∀P.
Osservazione 5 Se R = 0, M non dipende dal polo.
Osservazione 6 Il prodotto scalare I = MO × R non dipende dal polo (invariante
scalare).
Osservazione 7 I momenti sono costanti su rette parallele al risultante.
Osservazione 8 Esiste sempre una retta parallela a R, i cui punti sono poli
rispetto ai quali il momento è parallelo ad R. Questa retta prende il nome di
asse centrale (analogo dell’asse del Mozzi).
Osservazione 9 Se R 6= 0 e I = 0, l’asse centrale è costituito da punti rispetto
ai quali il momento è nullo. In questo caso l’asse centrale prende il nome di
retta di applicazione del risultante (analoga all’asse d’istantanea rotazione). L’equazione
dell’asse centrale è analoga all’equazione cinematica
P−O=
R ∧ MO
+ λR.
R2
(10)
8
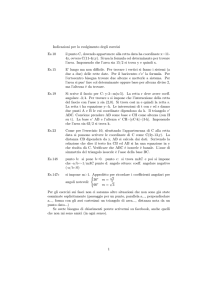
Coppia di Forze
Una coppia è un sitema di due forze a risultante nullo con diversa retta di applicazione. Poichè R = 0
³−−−−→´
∀P.
(11)
MP = MO + O − P ∧ R = MO
Per semplicità calcolo il momento rispetto ad A ( M non dipende dal polo)
³−−−−→´
³−−−−→´
³−−−−→´
MA = M = A − B ∧ F + B − B ∧ F = A − B ∧ F .
Il suo modulo vale
¯ ¯ ¯−−−−→¯ ¯ ¯
¯¯ ¯
¯ ¯ ¯
¯M ¯ = ¯A − B ¯ ¯F ¯ sin θ = F b
Operazioni invariantive elementari
¯−−−−→¯
¯
¯
b = ¯A − B ¯ sin θ.
(12)
(13)
Sono operazioni su un sistema di forze che non alterano MO e R. Più precisamente:
1. lo scorrimento di una forza lungo la sua retta di applicazione.
2. la composizione di più forze applicate nello stesso punto con il loro risultante.
3. la scomposizione di una forza in più forze applicate nello stesso punto.
Definizione 2 Due sistemi di forze si dicono equipollenti se si può passare dall’uno
all’altro mediante operazioni invariantive elementari.
Postulato 3 Dato un Corpo Rigido, due sistemi di forzeequipollenti applicati al
corpo producono gli stessi effetti meccanici.
Teorema 1 (Fondamentale dei sistemi di Forze) C.N.S affinchè due sistemi
di forze siano equipollenti è che abbiano lo stesso risultante e lo stesso momento
risultante rispetto ad un polo O
R = R0
MO = MO0 .
(14)
Problema 1 Dato un sistema di forze su un C.R., trovare il più semplice sistema
equipollente ad esso. Riconosciamo 4 casi:
9
1.
½
R=0
.
MO = 0
(15)
Il sistema è equipollente al sistema nullo, ovvero privo di forze.
2.
½
R=0
.
MO 6= 0
(16)
Il sistema è equipollente ad una coppia (da scegliersi in modo opportuno in
un piano π normale a MO .
3.
½
R 6= 0
.
∃ un polo O tale che MO = 0
(17)
Il più semplice sistema equipollente a 3) è una forza di vettore R applicata
ad O oppure ad un punto qualunque della retta r passante per O e parallela
ad R.
½
R 6= 0
.
∃/ un polo O tale che MO = 0
(18)
Si può dimostrare che un sistema con R 6= 0 è di tipo 3) se e solo se I = 0;
infatti se il sistema è di tipo 3), ∃ un polo O tale che MO = 0 =⇒ I = MO × R = 0.
Viceversa se un sistema ha R 6= 0 e I = 0, esiste una retta di punti rispetto ai quali
il momento ènullo (retta di applicazione del risultante. I sistemi di tipo 3) sono
equipollenti ad una sola forza, il risultante, applicato ad un punto della retta di
applicazione del risultante. Infatti il sistema della sola R applicata in O ( O ∈ r ≡
retta di applicazione del risultante) ha lo stesso risultante del sistema originario e
MO della forza applicata è nullo, come per il sistema originario.
I sistemi di tipo 4) hanno R 6= 0 e I 6= 0. Il sistema più semplice equipollentea
quello dato, è costituito da una forza, il risultante, applicato in un punto O dell’asse
centrale e una coppia in un piano normale al risultante di momento MO
10
11
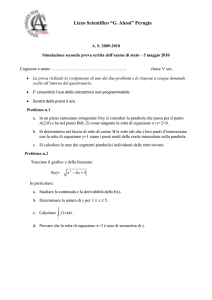
SISTEMI DI FORZE PARALLELE
Caso notevole, poichè i pesi formano un sistema di forze parallele. Su un C.R.
agisca un sistema di forze parallele Fi (i = 1, . . . , N ) con versore comune κ e con
risultante non nullo. Supponiamo che il C.R. venga schematizzato da un insieme
di N punti Pi (i = 1, . . . , N ) al quale viene applicato il sistema
di forze´ considerate
³
e sia Fi = Fi κ dove Fi è la componente di Fi secondo κ Fi = Fi × κ .
Il risultante è dato da
R=
N
P
Fi =
i=1
µN
P
¶
Fi κ = Rκ.
i=1
Supponiamo R 6= 0 allora I = MO × R = 0.
Dimostrazione. Per definizione
³−−−−→´
N ³−
N ³−
N
P
P
P
−−−→´
−−−→´
Pi − O ∧ Fi =
Pi − O ∧ Fi κ =
Fi Pi − O ∧ κ.
MO =
i=1
Calcoliamo
i=1
(19)
(20)
i=1
∙N
P
¸
³−−−−→´
Fi Pi − O ∧ κ × Rκ = 0.
I = MO × R =
i=1
|
{z
}
(21)
⊥κ
Questo sistema è del tipo 3). Il sistema si può ridurre ad una sola forza,
il risultante, applicato ad un punto P qualunque della retta di applicazione del
risultante.
³−−−−→´
N ³−
P
−−−→´
P −O ∧R=
Pi − O ∧ Fi
i=1
⇓
³−−−−→´
N ³−
P
−−−→´
P − O ∧ Rκ =
Pi − O ∧ Fi κ
i=1
⇓
³−−−−→´
³−−−−→´
N
P
Fi Pi − O ∧ κ
R P −O ∧κ=
i=1
⇓
12
∙ ³
³−−−−→´¸
N
−−−−→´ P
R P −O −
Fi Pi − O ∧ κ = 0.
(22)
i=1
Questa equazione è soddisfatta da ogni punto P (e solo da quelli) della retta di
applicazione del risultante. A questa retta appartiene P̄ tale che
³−−−−→´
N
P
Fi Pi − O
³−−−−→´ P
³−−−−→´
N
−−−−→ i=1
.
(23)
R P̄ − O =
Fi Pi − O
=⇒
P −O =
R
i=1
P̄ rispetto a tutti i punti della retta di applicazione del risultante ha la particolarità di non dipendere da κ, ovvero di essere indipendente dall’orientamento
delle forze. Se variamo κ lasciando invariate le componenti delle forze, varia
la retta di applicazione del risultante ma passa sempre per P̄ . P̄ si chiama
centro del sistema di forze parallele.
Osservazione 10 Consideriamo un sistema di N punti materiali. Per effetto
della gravità ciascuno di essi è soggetto ad una forza: il peso. Questa forza è diretta secondo la verticale discendente ed ha intensità costante. Dunque il sistema è
soggetto ad N forze parallele con risultante non nulla. Queste forze sono equipollenti ad un’unica forza, il peso del sistema, applicata ad un punto della retta di
applicazione del risultante.
Baricentro
Denotiamo con G il baricentro o centro delle forze peso agenti su un corpo. Quindi
il baricentro è il punto in cui è possibile applicare la forza peso risultante indipendentemente dalla posizione del corpo rispetto alla verticale. Per un sistema discreto
di punti
³−−−−→´
N
P
pi Pi − O
−−−−→ i=1
G−O =
.
(24)
N
P
pi
i=1
Per un sistema continuo
R
³−−−−→´
κ
(P
)
P − O dC
C
−−−−→
R
G−O =
.
κ (P ) dC
C
R
(25)
κ (P ) dτ rappresenta il peso totale e κ (P ) dC il peso elementare, mentre κ (P )
è il peso specifico. κ (P ) è una funzione non negativa definita in tutti i punti del
campo.
C
dC è un elemento infinitesimo di volume se il corpo è tridimensionale
dC è un elemento infinitesimo di superficie se il corpo è bidimensionale
dC è un elemento infinitesimo di linea se il corpo è monodimensionale.
κ (P ) è costante se il corpo è omogeneo. In coordinate cartesiane
R
R
R
xκdC
yκdC
zκdC
xG = RC
, yG = RC
, zG = RC
.
κdC
κdC
κdC
C
C
C
(26)
13
Proprietà del Baricentro
1. Distributiva Suddividiamo idealmente C in N parti Pi . Pi è il baricentro di
Pi e pi è il suo peso
³−−−−→´
R
κ
(P
)
P − O dC
N
S
C
−−−−→
R
G−O =
Pi
C=
κ (P ) dC
i=1
C
³−−−−→´
κ
(P
)
P − O dC
Pi
R
.
κ (P ) dC
C
N R
P
−−−−→
G−O =
i=1
⇓
(27)
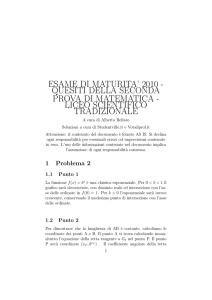
Quindi il baricentro del corpo C è il baricentro di N punti materiali Pi (corrispondenti ai singoli baricentri delle parti Pi ), dotati di peso pi . Prendiamo
il corpo in figura e dividiamolo idealmente in due parti A e B. Sia P̄ (A) il
baricentro di A e sia P̄ (B) il baricentro di B, allora
³−−−−−−−→´
³−−−−−−−→´
P̄ (B) − O
P̄
(A)
−
O
+
p
(B)
p
(A)
−−−−→
G−O =
,
(28)
p (A) + p (B)
dove p (A) è il peso di A e p (B) è il peso di B. La dimostrazione di questa
proprietà è descritta nell’Eq.(27).
2. Simmetria Se il corpo possiede un piano di simmetria materiale π il baricentro
appartiene a π. Ricordiamo che simmetria materiale vuol dire che se P ∈ C,
anche il suo simmetrico P 0 ∈ C e κ (P ) = κ (P 0 ).
Dimostrazione. Sia z l’asse normale al piano di simmetria π, allora
R
zκdC
zG = RC
= 0.
κdC
C
(29)
L’integrale a numeratore è nullo perchè l’integranda è dispari. Infatti
¡ R
¢
R
R
R
R
zκdC
+ zκdC+ − C + zκdC
+ zκdC+ C − zκdC
C
C
C
R
R
zG = R
=
=
= 0, (30)
κdC
κdC
κdC
C
C
C
poichè
−
Z
C+
zκdC =
Z
C−
zκdC.
(31)