La funzione primitiva
Può accadere di conoscere la derivata di una funzione
f’(x) e di voler conoscere f(x). Ad esempio, conosciamo il
tasso di accrescimento di una data popolazione e
vorremmo conoscere il numero di individui presenti nella
popolazione al tempo t. Conosciamo velocità o
accellerazione di un corpo e vorremmo conoscere lo
spazio percorso in un dato tempo.
Supponiamo di conoscere che y’=2x allora sappiamo che
y = x2 è una funzione la cui derivata è la funzione
assegnata, diremo che x2 è una funzione primitiva di
2x.
La funzione primitiva
Poiché abbiamo già dimostrato che se due funzioni
derivabili hanno la stessa derivata allora differiscono per
una costante c, possiamo dire che 2x non ha una sola
primitiva, ma infinite primitive, tutte le funzioni x2 +c
sono primitive e non possono essercene altre che queste.
In generale, assegnata una funzione f’(x), esiste un
insieme infinito di primitive f(x)+c.
La funzione primitiva
Puoi scatenarti nel determinare le funzioni primitive delle
principali funzioni che conosci essere derivata di una data
funzione, ad esempio:
Se f’(x) = x2 chi è f(x)?
f(x)= x3 ha per derivata 3 x2 e allora?
Basterà dividere per 3…. f(x)= x3/3 è una primitiva di x2
Tutte le primitive di x2 sono dunque le funzioni f(x)=
x3/3 +c
La funzione primitiva
Più in generale,
se f’(x) = xn
Tutte le primitive di xn sono dunque le funzioni f(x)=
xn+1/(n+1) + c
Ancor più in generale,
se f’(x) = xα dove α è un numero reale ≠ -1
Tutte le primitive di xα sono dunque le funzioni f(x)=
xα+1/(α+1) + c
La funzione primitiva
Se f’(x) = 1/x ?
Le primitive sono f(x) = log|x| +c
Se f’(x) = ex
Le primitive sono f(x)= ex + c
Se f’(x) = cosx
Le primitive sono f(x)= sinx + c
Se f’(x)= sinx
Le primitive sono f(x) = -cosx + c
Integrali
Sia N(t) il numero di individui di una data popolazione in
funzione del tempo. Supponiamo di conoscere i tassi
medi di accrescimento in n sottointervalli di un intervallo
di tempo determinato [t0 , tz]. Siano g1=ΔN1/Δt1, g2=
ΔN2/Δt2 ,…gn = ΔNn/Δtn
Vogliamo calcolare l’incremento totale dell’ampiezza
della popolazione espressa in termini di g
Poiché ΔN1= g1 Δt1, ΔN2= g2 Δt2, …. ecc. l’incremento
totale sarà Σ ΔNi= Σ gi Δti
Integrali
Nel caso in cui il tasso di accrescimento cambi in modo
continuo nel tempo g=g(t), la soluzione al problema è
molto diversa. Possiamo sostituire nella formula
precedente gi con g(ti), che ha però in generale valore
diverso e quindi introduciamo un errore. E’ possibile
ridurre l’errore ed avere una precisione maggiore
aumentando il numero dei sottointervalli. Possiamo anche
far tendere n all’infinito, l’ampiezza degli intervalli a 0 e
cercare il limn→∞ Σ g(ti)Δti se tale limite esiste viene
detto integrale di g(t) su [t0 , tz] ed indicato con ∫t0t1g(t)dt
Integrali
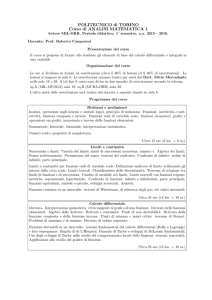
Sia f(x) una funzione continua e consideriamo un
intervallo [a, b] contenuto nel suo dominio. Supponiamo
che f(x)>0 su questo intervallo, vogliamo calcolare l’area
della regione R delimitata dal grafico y=f(x), l’asse x e le
rette parallele all’asse y nei punti estremi x=a ed x=b.
La determinazione dell’area di una regione piana è molto
importante in campo morfologico
Possiamo approssimare la regione R con un insieme di
rettangoli. A questo scopo suddividiamo l’intervallo [a, b]
in n sottointervalli uguali xi-xi-1=(b-a)/n =Δx e su
ciascuno di questi intervalli dterminiamo il massino yMi
ed il minimo ymidi f(x)
Integrali
Integrali
Sia A l’area incognita di R. A può essere approssimata
per difetto dalla somma delle aree degli n rettangoli di
altezza ymi, che sarà più piccola infatti di A, e che
indicheremo con Al; A può essere approssimata per
eccesso dalla somma delle aree dei rettangolini con
altezza yMi, che indicheremo con Au
Al= ym1Δx + ym2Δx +…..+ ymnΔx
Au= yM1Δx + yM2Δx +….+ yMnΔx
Al ≤ A ≤ Au
Procediamo
a
suddivisioni
sempre
maggiori
dell’intervallo [a, b]. Facciamo tendere n all’infinito,
Δx→0, si osserva che Au- Al→0
Integrali
Quindi Au ed Al tendono ad uno stesso limite
A=limn→∞ Al=limn→∞ Au
Questo limite comune viene scritto col segno di integrale
A= ∫ab f(x)dx
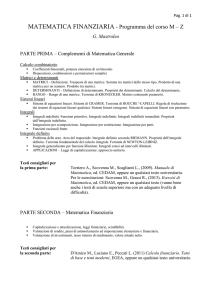
Possiamo rimuovere l’ipotesi f(x)>0 introducendo l’area
orientata (o con segno) di un rettangolo R
A( R) =(x-x0)(y-y0)
L’area orientata è positiva se x> x0 e y> y0 oppure x< x0 e
y< y0 ; ed è negativa se x> x0 e y< y0 oppure x< x0 e y>
y0
Integrali
In sintesi, l’area orientata è positiva se i quattro vertici
(x0, y0 ), (x, y0), (x,y), (x0,y) così come sono elencati
vengono percorsi in senso antiorario, mentre è negativa se
vengono percorsi in senso antiorario.
Integrali
Proprietà degli integrali:
Sia f:[a, b]→R una funzione integrabile
• ∀x∈ [a, b] si ha ∫ab f(t)dt=∫ax f(t)dt +∫xb f(t)dt
• ∫ab f(t)dt = -∫ba f(t)dt
• ∫ab cf(t)dt =c ∫ab f(t)dt per ogni costante c
• ∫ab (f(t)+g(t))dt = ∫ab f(t)dt + ∫ab g(t)dt
• se f(x)≤g(x) ∀x∈ [a, b] allora
∫ab f(t)dt ≤ ∫ab g(t)dt
Integrali e primitive
Sia f:[a, b]→R una funzione continua
Indichiamo con F:[a, b]→R la funzione F(x)= ∫ax f(t)dt
Dimostriamo che F(x) è derivabile e la sua derivata
F’(x)=f(x)
Dim:[F(x+h)-F(x)]/h =[∫ax+h f(t)dt - ∫ax f(t)dt ]/h =
=[∫ax+h f(t)dt + ∫xa f(t)dt ]/h =[ ∫xx+h f(t)dt ]/h
Indichiamo con M(h) e con m(h) rispettivamente il
massimo ed il minimo valore di f nell’intervallo di
estremi x ed x+h. Essendo f continua si ha
limh→0M(h)=limh→0 m(h)=f(x)
Integrali e primitive
Supponiamo h>0, si ha
hm(h)≤ ∫xx+h f(t)dt ≤ hM(h), dunque
limh→0m(h)=f(x)≤limh→0[∫xx+hf(t)dt ]/h≤ limh→0 M(h)=f(x)
Analogamente per h<0
Dunque abbiamo dimostrato che la funzione integrale
F(x) è una primitiva della funzione f(x).
Poiché sappiamo che tutte le primitive di una stessa
funzione differiscono tra loro per una costante, avremo
che una qualunque primitiva di f(x) si esprimerà come
∫ax f(t)dt + c
si indica anche con ∫f(t)dt e si chiama integrale indefinito,
l’insieme di tutte le primitive di f(x)
Integrali e primitive
Sia f:[a, b]→R una funzione derivabile
∀x∈[a, b] si ha ∫ax f’(t)dt =f(x)-f(a)
Infatti sia F(x)= ∫ax f’(t)dt per il teorema precedente,
sappiamo che F è derivabile ed F’(x)=f’(x), dunque F(x)
ed f(x) differiscono tra loro per costante F(x)=f(x)+c .
Dal momento che F(a)=0=f(a)+c, si ricava c=-f(a), quindi
F(x)=f(x)-f(a) e si ha perciò
∫ax f’(t)dt =f(x)-f(a)
Integrali e primitive
ESEMPIO 1 Calcolare ∫12( 4x2 -3x + 2)dx
∫12( 4x2 -3x + 2)dx= ∫12 4x2dx + ∫12-3xdx + ∫122dx=
4 ∫12 x2dx -3 ∫12 xdx +2 ∫12dx =
4(23/3 - 1/3) -3(22/2 - 1/2) +2(2-1)=28/3 -9/2 +2 =41/6
ESEMPIO 2 Calcolare ∫0πsintdt
∫0πsintdt =-cos(π)-(-cos(0))=2
ESEMPIO 3 Calcolare ∫13(1/t)dt
∫13(1/t)dt = log3 -log1 = log3
Alcune tecniche di integrazione
Integrazione per parti:
Sappiamo che (fg)’=f’g+fg’, per cui
fg= ∫(fg)’(t)dt=∫f’(t)g(t)dt + ∫f(t)g’(t)dt
Possiamo quindi scrivere
∫f(t)g’(t)dt = fg - ∫f’(t)g(t)dt
La formula permette di ricondurre l’integrale di fg’
all’integrale di f’g, nella speranza che quest’ultimo sia più
facile da calcolare
ESEMPIO 1 Determinare l’integrale indefinito ∫ tetdt
Consideriamo f(t)=t e g(t)= et, applichiamo il metodo di
integrazione per parti, si ha ∫ tetdt =tet - ∫ 1·etdt = tet - et
+c
Alcune tecniche di integrazione
Integrazione per parti:
ESEMPIO 2 Determinare ∫ sin2x dx
∫sin2x dx = ∫ (sinx)(sinx) dx, indichiamo con f(x)=sinx e
con g’(x)=sinx, per cui g(x)=-cosx, si ha
∫sin2x dx =sinx(-cosx)- ∫(cosx)(-cosx)dx= -sinxcosx+
∫cos2x dx=-sinxcosx+∫(1-sin2x )dx =-sinxcosx+x-∫sin2x dx
Abbiamo quindi
2 ∫sin2x dx = -sinxcosx +x +c, da cui
∫sin2x dx = (-sinxcosx +x)/2 + c
Alcune tecniche di integrazione
Integrazione per parti:
ESEMPIO 3 Determinare ∫ logx dx
Consideriamo f(x)=logx e g’(x)=1, quindi g(x)=x, si ha
∫ logx dx = xlogx - ∫ x(1/x)dx = xlogx - ∫ dx=xlogx -x + c
Alcune tecniche di integrazione
Integrazione per sostituzione:
Dalla formula di derivazione di una funzione composta,
ed indicando con F una primitiva di f
(F(g(t)))’=f(g(t)g’(t), otteniamo
∫F(g(t))’dt = F(g(t)) +c =∫f(g(t))g’(t)dt
Per l’integrale definito si ha
∫ab f(g(t))g’(t)dt =F(g(b))-F(g(a)) =∫
g(b)
g(a)
Dove si è posto x=g(t)
f(x)dx
Alcune tecniche di integrazione
Integrazione per sostituzione:
ESEMPIO 1 Determinare ∫tcos(t2)dt
Consideriamo g(t)=t2 ed f(x)=cosx, applicando la tecnica
di sostituzione otteniamo, moltiplicando e dividendo per
2 l’integrale assegnato
∫tcos(t2)dt= (1/2)∫2tcos(t2)dt = (1/2)∫cosxdx= (1/2)sinx + c
=(1/2) sin(t2)+c , essendo x=g(t)
Alcune tecniche di integrazione
Integrazione per sostituzione:
2
-t
ESEMPIO 2 Determinare ∫2te dt
Consideriamo g(t)=-t2 ed f(x)=exp(x), applicando la
tecnica di sostituzione otteniamo, moltiplicando e
dividendo per -1 l’integrale assegnato
-∫-2te-t2dt=- ∫exdx= -ex+c= -e-t2 + c , essendo x=g(t)
Se fosse stato richiesto il calcolo di ∫12 2te-t2dt
2
2
-t
∫1 2te dt = - ∫-1-4 exdx= -e-4- (-e-1)= e-1-e-4
Integrali impropri
Sia f:[a, +∞)→R, diremo che f è integrabile su [a, +∞) se
esiste finito il limb→+∞ ∫ab f(t)dt
∫a+∞ f(t)dt = limb→+∞ ∫ab f(t)dt
Chiameremo
+∞)
∫a+∞ f(t)dt integrale improprio di f su [a,
Integrali impropri
ESEMPIO Sia f(t)=t-α su [1, +∞)
Se α=1 limb→+∞ ∫ab t-1 dt = limb→+∞logb=+∞
Quindi l’integrale improprio di f(t)=1/t non esiste
Se α>1
limb→+∞ ∫1b t-α dt = limb→+∞ (b-α+1- 1)/(-α+1) = 1/(α-1)
Quindi in questo caso l’integrale improprio esiste
Se α<1
limb→+∞ ∫1b t-α dt = limb→+∞ (b-α+1- 1)/(-α+1)=+∞
Quindi l’integrale improprio in questo caso non esiste