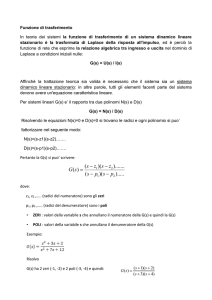
Funzione di trasferimento (f.d.t.)
Dato un sistema si definisce funzione di trasferimento, nel dominio di Laplace, il rapporto tra la
grandezza d’uscita e la grandezza d’ingresso (Fig. 5) Essa esprime il legame esistente tra la
sollecitazione applicata al sistema e la risposta ad essa corrispondente.
Vi(s)
Sollecitazione
Sistema
Vu(s)
Risposta
G( s)
Vu( s)
Vi( s)
Fig. 1
Si può studiare il sistema nel:
1. Dominio del tempo risolvendo un’equazione differenziale (vedi metodo di Eulero)
2. Dominio di Laplace determinando la f.d.t. che consente di valutare la risposta eseguendo il
prodotto tra la f.d.t. e la trasformata di Laplace del segnale di ingresso (es. gradino unitario
1/s)
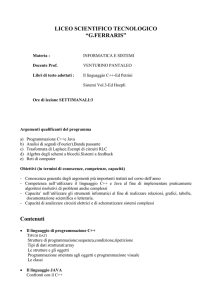
Dominio del tempo (fig.6) esempio carica scarica condensatore
vi(t)
Sistema RC
vu(t)
vi (t ) R C
dominio t
dvu
vu (t )
dt
Fig. 2
Dominio s (fig.7) esempio risposta di un filtro RC a un generico segnale di ingresso
(rampa, gradino, sinusoide ecc.)
Vi(s)
Sistema filtro
Vu(s)
dominio s
Fig. 3
G( s)
Vu( s)
Vi( s)
APPUNTI DI SISTEMI :
La trasformata di Laplace
Sintesi
prof.C.Utizi -A. Messina
Trasformata di LAPLACE
La ricerca del legame ingresso uscita (f.d.t. funzione di trasferimento)in un qualsiasi sistema
(es. sistema di controllo), porta in generale a determinare la struttura matematica di un
equazione integro-differenziale, un equazione che ha come incognite le funzioni che
rappresentano analiticamente l’andamento nel tempo delle grandezze d’ingresso e d’uscita
(Fig.4)
vi(t)
SISTEMA
Risoluzione di una Equazione
Integro-Differenziale (modello matematico)
vu(t)
Fig. 4
La risoluzione del circuito con equazione integro-differenziale si ottiene, come già detto, o con il
metodo numerico di Eulero o attraverso un procedimento che utilizza la trasformata di
Laplace.
Quest’ultima consente di trasformare un’equazione differenziale in un’equazione algebrica, la cui
soluzione non è più una funzione del tempo ma è un semplice numero complesso.
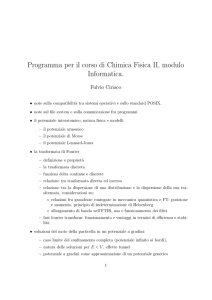
Il metodo della trasformata di Laplace è rappresentato in (Fig.5) attraverso schema a blocchi.
i(t)
INGRESSO
RISOLUZIONE EQUAZIONE
INTEGRO-DIFFERENZIALE
u(t)
TEMPORALE
USCITA
TEMPORALE
MODELLO MATEMATICO TEMPORALE
TRASFORMATA
DI LAPLACE
TRASFORMATA
DI
LAPLACE
ANTITRASFORMATA
DI
LAPLACE
RISOLUZIONE EQUAZIONE ALGEBRICA
I(s)
MODELLO MATEMATICO IN s
U(s)
Fig. 5
Nella pratica il modello matematico del sistema e la sollecitazione ad esso applicata, funzioni
della variabile tempo (t), sono trasformati in funzione della variabile complessa s.
Dopo aver definito le relazioni algebriche che descrivono il comportamento del sistema nel
dominio della variabile s, con un’operazione di antitrasformazione si ottiene la risposta cercata
u(t) la quale è funzione del tempo.
La conoscenza della u(t) permette così di analizzare il comportamento del sistema nel dominio
del tempo. La risoluzione delle equazioni integro-differenziali si riduce alla risoluzione di più
semplici equazioni algebriche, facilitando così lo studio di sistemi formati da molti componenti.
APPUNTI DI SISTEMI :
La trasformata di Laplace
Sintesi
prof.C.Utizi -A. Messina
L’operazione di trasformazione (Fig. 6) stabilisce una corrispondenza biunivoca tra gli elementi
dell’insieme di partenza definito da una funzione f(t) del tempo e quelli dell’insieme di arrivo
definito da una funzione F(s) dipendente dalla variabile complessa s.
s j =2f in regime sinusoidale =0, quindi s=J
Trasformata di Laplace
L
Funzioni nel
dominio
del tempo
Funzione
dominio di s
f(t)
F(s)
Variabile reale
t
Variabile
complessa
s
L-1
nel
Antirasformata di Laplace
Fig. 6
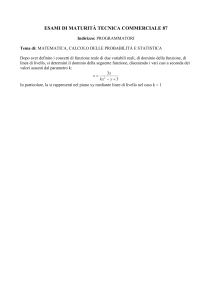
La trasformata di Laplace viene utilizzata per semplificare le soluzione delle equazioni
differenziali a coefficienti costanti, permette di semplificare lo studio dei sistemi complessi
riducendoli a schemi a blocchi. In fig. 11 la trasformazione dei componenti R, L, C.
R
L
C
s
t
t
s
t
s
R
SL
1
SC
t
Fig. 11
s
APPUNTI DI SISTEMI :
La trasformata di Laplace
Sintesi
prof.C.Utizi -A. Messina
Vi sono alcuni segnali utilizzati come segnali standard (impulso unitario: gradino, rampa lineare,
sinusoidale, ecc.) d’ingresso nell’analisi delle prestazioni dei sistemi di controllo sia in regime
transitorio che stazionario; tali segnali vengono chiamati segnali canonici e sono fondamentali
perché la risposta di un sistema lineare può essere sempre ricavata come combinazione lineare
delle risposte dello stesso sistema ai segnali canonici.
Per eseguire la trasformata delle funzioni principali (impulso unitario: gradino, rampa lineare,
sinusoidale, ecc.), si utilizza la tabella 1, per l’antitrasformazione viene utilizzata la tabella 2
Tabella -1
APPUNTI DI SISTEMI :
Tabella 2
La trasformata di Laplace
Sintesi
prof.C.Utizi -A. Messina
APPUNTI DI SISTEMI :
La trasformata di Laplace
Sintesi
prof.C.Utizi -A. Messina
Esempio -1 Analisi di un sistema RC tramite L-trasformata
Esempio di f.d.t di un circuito RC nel dominio del tempo e nel dominio S
Vediamo come si risolve il circuito nel DOMINIO DEL TEMPO
1. si applica Kirchhoff
vi (t ) R i(t ) vu (t )
(1)
poiché
i (t ) C
dvu
dt
2. sostituendo nella (1) si ha:
vi (t ) R C
dvu
vu (t )
dt
3. si ricava con un procedimento di integrazione la tensione vu
t
vu (t ) 1 e
Vediamo come si risolve il circuito nel DOMINIO DI S
1 . Trasformiamo con Laplace la variabile reale tempo con variabile complessa s e
ridisegnamo il circuito utilizzando la nuova simbologia
ts
R
Vi(t ) Vi( s )
i (t ) I ( s )
Vu (t ) Vu ( s )
RR
C
1
sc
Vi(s)
I(s)
1
sC
Vu(s)
APPUNTI DI SISTEMI :
La trasformata di Laplace
Sintesi
prof.C.Utizi -A. Messina
2 . scriviamo l’equazione algebrica applicando Kirchhoff
Vi( s) R I ( s)
1
I ( s)
s C
(1)
3. ricaviamo la trasformata di Laplace dell’uscita Vu(s) applicando la legge di Ohm al
condensatore 1/sC
Vu( s)
1
I ( s)
s C
(2)
4 . ricaviamo la I(s) dalla (1) mettendo in evidenza I(s)
1
Vi( s) R
I ( s)
s C
Vi( s)
I ( s)
1
R
s C
5 . sostituiamo la I(s) appena trovata nella (2)
6.
Vu( s)
1
Vi( s)
1
s C
R
s C
Vu( s)
1
Vi( s)
s C R s C 1
s C
facciamo il m.c.m.
semplificando sC si ottiene :
Vu( s)
Vi( s)
Vi( s)
R C s 1 s 1
7 . troviamo la f.d.t. del sistema identificata con G( s)
G( s)
Vu( s)
Vi( s)
Vu( s )
1
Vi( s ) s 1
(3)
Vu( s)
1
APPUNTI DI SISTEMI :
Vi( s) s 1
La trasformata di Laplace
Sintesi
prof.C.Utizi -A. Messina
8 . conoscendo la f.d.t. del sistema, basta moltiplicarla per l’ingresso Vi(s) per trovare l’uscita
Vu(s)
G( s)
Vi(s)
1
s 1
Vu(s)
Per cui
Vu( s) Vi( s) G ( s) Vi( s)
1
s 1
(4)
Se utilizziamo come ingresso un gradino di tensione di ampiezza unitaria (vedere tabella 1) la
(4) diventa:
1
1
Vu( s) Vi( s) G ( s)
s s 1
9 . Antitrasformiamo per ritornare nel dominio del tempo : con l’uso della tabella andiamo a
vedere la Vu(s) ottenuta a cosa corrisponde nel dominio del tempo.
Dalla tabella risulta che:
1
s 1 s
t
1 e
corrisponde a
quindi la mia Vu(t) del sistema in esame è:
t
vu (t ) 1 e
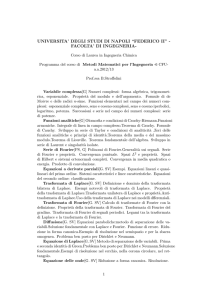
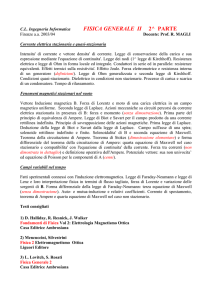
10 . quella ottenuta è l’espressione analitica della risposta a gradino il cui andamento temporale
è quello di figura.
Step Response
From: U(1)
1
0.9
0.8
0.7
0.6
To: Y(1)
Amplitude
G( s)
0.5
0.4
0.3
0.2
0.1
0
0
0.1
0.2
0.3
Time (sec.)
0.4
0.5
0.6