STATICA DEI CORPI RIGIDI
La Statica è la parte della Meccanica che si occupa dello studio dell’equilibrio dei corpi, ovvero di
quella condizione che consiste nel permanere indefinito dei corpi stessi in uno stato di quiete o di
moto rettilineo uniforme. Tale studio coinvolge le possibili cause che possono perturbare lo stato di
quiete di un corpo (forze esterne), nonché le azioni esplicate dai vincoli (reazioni vincolari).
AZIONI ESTERNE
Le azioni esterne sono quelle azioni che vengono trasmesse al corpo o al sistema di corpi attraverso
la sua superficie esterna (si pensi ad esempio alle azioni da vento sugli edifici, oppure alla neve
gravante su una copertura), nonché quelle azioni proporzionali alla massa del corpo dovute ad
esempio al campo gravitazionale, ai campi elettromagnetici, etc. Inoltre, nell’ambito delle azioni
esterne vengono comprese anche le distorsioni, i cedimenti vincolari e le azioni termiche che vengono
appunto modellate come azioni esterne considerando il loro effetto deformativo e valutandone quindi
la risposta strutturale.
Per tenere conto di tali azioni nella trattazione della statica dei corpi rigidi, occorre richiamare alcune
definizioni. Tra queste, nel seguito sono considerate la definizione di forza e coppia concentrate e
distribuite, di sistemi di forze, nonché alcune definizioni e postulati che coinvolgono tali enti.
FORZA, MOMENTO DI UNA FORZA, SISTEMI PIANI DI FORZE
Nella trattazione della statica dei corpi rigidi, la forza sarà semplicemente vista come una qualunque
causa capace di perturbare lo stato di quiete di un corpo dando luogo ad una variazione della sua
configurazione di riferimento (trasporto). In ogni caso rimanendo nell’ipotesi di corpi rigidi, ovvero
considerando che la forza non darà luogo a deformazioni del corpo.
La forza è in generale funzione della posizione, della velocità e del tempo, ma, in questo ambito, verrà
considerato il caso di forza costante, ovvero indipendente da questi tre parametri.
1
Guardando la forza F come un particolare vettore, libero o applicato, essa è dunque caratterizzata da
direzione, verso e intensità (o modulo). Inoltre, in presenza di più forze, ovvero di sistemi di forze, si
considera il caso particolare di sistema piano di forze, in cui tutte le rette d’azione delle forze che
compongono il sistema appartengono ad uno stesso piano, che coincide appunto con il piano in cui
avviene la rototraslazione rigida del corpo.
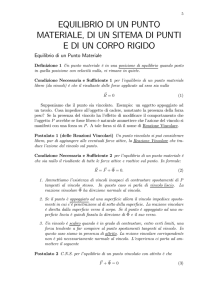
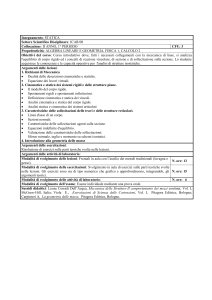
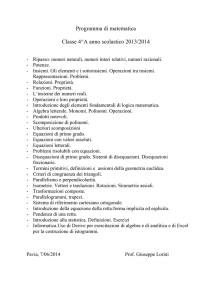
In tale ambito, è importante altresì definire il momento della forza rispetto ad un punto O detto polo,
ovvero il prodotto vettoriale tra il vettore posizione r e la forza F: M O = r × F
Fig. 1
Inoltre, considerando una retta a di versore e a passante per O, si dice momento assiale della forza F
a
lo scalare: M=
M o ⋅ e . Il momento assiale non dipende dalla scelta del polo sulla retta a rispetto a
a
cui si calcola il momento.
Si osserva che, mentre la forza F è un vettore applicato, il momento M O è un vettore libero che non
ha un significato fisico diretto ma è solo il risultato di un’operazione vettoriale eseguita sulla
grandezza fisica F . Inoltre si può facilmente osservare che il momento assiale della forza F è pari
al momento assiale della sua componente ortogonale, ovvero al prodotto del modulo della
componente ortogonale di F per la distanza della retta di azione della forza F dalla retta a (tale
distanza è detta anche braccio della forza rispetto all’asse di rotazione).
Con riferimento ad un sistema piano di forze si possono introdurre le seguenti definizioni:
2
-
un sistema piano di n forze Γ ( Pi , F i ) ammette una risultante R , ovvero una forza che, agendo
sullo stesso corpo rigido o sul sistema di corpi rigidi, produce lo stesso effetto prodotto dalle
n
forze. Essa è data da: R = ∑ F i ;
i =1
-
allo stesso modo, un sistema piano di n forze Γ ( Pi , F i ) ammette un momento risultante M O
rispetto a un polo arbitrario O pari alla somma dei momenti delle singole forze rispetto allo
=
stesso polo: M
O
n
∑r
i
× Fi ;
i =1
-
se si considerano due sistemi piani di forze, essi si dicono staticamente equivalenti quando
producono lo stesso effetto su qualunque corpo rigido su cui essi vengono applicati. Ciò
comporta che sono caratterizzati dalla stessa risultante e dallo stesso momento risultante
rispetto qualsiasi polo.
Se un sistema piano di forze applicato ad un corpo rigido ne lascia imperturbato lo stato di quiete o
di moto, il sistema si dice equilibrato o anche sistema nullo, oppure sistema di forze in equilibrio. In
tal caso il sistema è caratterizzato dall’avere nulli sia la risultante sia il momento risultante rispetto
a qualsiasi polo.
Un particolare sistema di forze è quello costituito da due forze aventi la stessa direzione, stessa
intensità e verso opposto, poste a distanza d. Questo sistema viene denominato coppia di forze e
risulta caratterizzato da risultante nulla e da momento risultante indipendente dalla scelta del polo e
di modulo pari a F d .
Nel caso di un sistema piano di forze equilibrato è possibile osservare che:
-
un sistema costituito da due sole forze (non nulle) è equilibrato se, e solo se, le due forze sono
direttamente opposte;
-
condizione necessaria affinché un sistema piano costituito da sole tre forze sia equilibrato è
che le rette di azione di tali forze siano complanari e concorrenti in uno stesso punto proprio
o improprio.
3
Nello studio della statica dei corpi rigidi, risultano particolarmente utili i seguenti due postulati:
-
non si altera l’equilibrio di un corpo rigido se si sostituisce a più forze applicate in uno stesso
punto la loro risultante applicata nel punto medesimo;
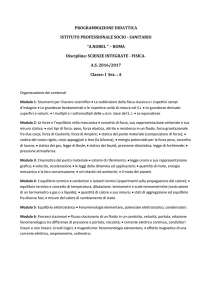
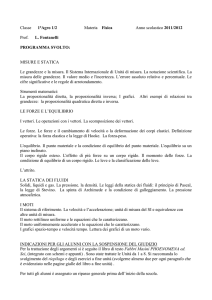
-
non si altera l’equilibrio di un corpo rigido se si trasporta il punto di applicazione di una forza
lungo la propria retta di azione (Fig. 2).
Fig. 2
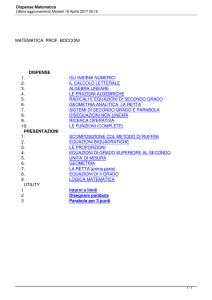
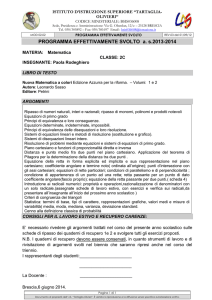
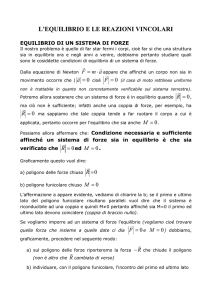
Per le forze ed i sistemi di forze possono essere definite le seguenti operazioni di decomposizione:
o una forza F si può decomporre in due forze di assegnata retta di azione se il punto di
intersezione delle due rette di queste forze appartiene alla retta di azione della forza.
In particolare dalla Fig. 3 si osserva come le due forze possano essere definite in modo
da avere un sistema di forze equivalenti ad F , oppure un sistema di forze equilibrante
F ovvero caratterizzato da risultante e momento risultante rispetto ad un arbitrario
polo uguali in modulo ma opposti in verso rispetto a quelli caratterizzanti il sistema
costituito dalla sola forza F ;
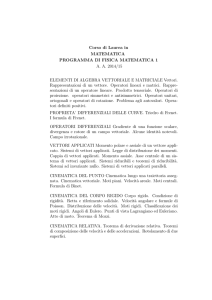
o la decomposizione di una forza secondo una retta t e un punto A ammette soluzione e
questa è unica se A non appartiene alla retta t (Fig. 4). In questo caso la retta di azione
della seconda forza è individuata dalla retta passante per il punto A e il punto di
intersezione tra la retta t e la retta di azione della forza;
o la decomposizione di una forza secondo tre direzioni implica che: (a) se le quattro rette
di azione convergono in uno stesso punto il problema è indeterminato; (b) se le tre
4
rette di azione delle forze incognite convergono in uno stesso punto non appartenente
alla retta di azione di F , il problema è impossibile; (c) se la retta di azione della forza
F passa per un punto comune alle rette di azione di due forze incognite, la restante
forza incognita deve essere nulla affinché la soluzione esista; (d) se le rette di azione
delle tre forze incognite e della forza F si incontrano a due a due in punti distinti, la
soluzione esiste ed è unica;
o una decomposizione molto utile del sistema costituito dalla sola forza F , è quella che
considera il trasporto della forza dal suo punto di applicazione P ad un punto A
arbitrariamente scelto del piano. In tal caso si può dimostrare che il sistema
equivalente è costituito da una forza uguale ad F passante per A e da una coppia di
trasporto di intensità par a M=F d, essendo d la distanza della retta di azione della
forza dal punto A. Ciò può essere fatto proprio in virtù del teorema del trasporto
secondo il quale è lecito traportare la forza F parallelamente a sé stessa purché si
aggiunga la coppia di trasporto.
Fig. 3
5
Fig. 4
FORZE E COPPIE DISTRIBUITE
Nelle applicazioni strutturali le forze o le coppie concentrate rappresentano un’astrazione volta a
rappresentare i casi nei quali la superficie o il volume su cui agiscono le forze presentano dimensioni
infinitesime rispetto alle dimensioni complessive del corpo. Si ricorre infatti molto frequentemente a
forze o coppie distribuite (o ripartite) su una superficie o su una linea (si ricorre a quest’ultimo caso
quando le forze agiscono su una striscia di superficie simmetrica rispetto la linea media).
Con riferimento dunque a forze e coppie distribuite, si possono dunque introdurre le seguenti
definizioni:
∆F
∆S
dF
dS
-
forza superficiale (relativa all’unità di superficie):
=
P lim
=
-
coppia superficiale (relativa all’unità di superficie):
=
M lim
=
∆S → 0
∆S → 0
∆M
∆S
dM
dS
dove ∆S rappresenta l’area elementare di un intorno del punto A; F o M la forza o la coppia
che agisce su ∆S .
∆Q
dQ
∆x
dx
-
forza superficiale relativa all’unità di lunghezza:
=
=
q lim
-
coppia superficiale relativa all’unità di lunghezza:
=
m lim
=
∆x → 0
∆x → 0
∆M
∆x
dM
dx
6
In particolare, se risulta che lim
∆x → 0
∆Q
∆x
= ∞ , mentre risulta finito il lim q ( x)∆x =F , allora F prende il
∆x → 0
∆M
= ∞ , mentre se risulta finito il
∆x → 0 ∆x
nome di carico concentrato all’ascissa s. Allo stesso modo, se lim
lim m( x)∆x =M , allora M prende il nome di coppia concentrata all’ascissa s.
∆x → 0
Fig. 5
ANALISI STATICA DEL CORPO RIGIDO LIBERO
Avendo introdotto la definizione di forze e coppie concentrate e distribuite, si prende nuovamente in
esame il caso di corpo rigido libero, ovvero in assenza di vincoli, ma si suppone stavolta che nella
configurazione di riferimento C0 agiscano sul corpo:
-
forze di volume: {b( x), x ∈C0 }
-
forze di superficie: { f ( x), x ∈ ∂C0 }
queste forze vengono dette forze attive.
È possibile osservare che: condizione necessaria e sufficiente affinché il corpo sia in equilibrio,
ovvero permanga nella configurazione C0, è che il sistema di forze attive ad esso applicato sia
equilibrato, ovvero equivalente ad un sistema nullo. Questa condizione si traduce nelle equazioni
cardinali della statica, che discendono proprio dalla definizione di sistema di forze equilibrato
caratterizzato da risultante e momento risultante nulli:
R = 0
M O = 0
equazioni cardinali della statica:
dove appunto R rappresenta la risultante del sistema di forze attive agenti sul corpo, mentre M O
rappresenta il momento risultante rispetto un polo arbitrario.
7
In particolare, se si considera un sistema piano di forze, dove il piano è individuato da un sistema di
riferimento con versori e 2 , e3 , le equazioni cardinali della statica si riducono ad un sistema di tre
equazioni algebriche:
R2 = 0
3
R = 0
M = 0
O
dove R2 ed R3 sono le componenti della risultante lungo l’asse di versore e 2 ed e3 rispettivamente,
mentre MO è l’intensità del momento risultante. Tali equazioni possono essere dedotte effettuando
appunto un equilibrio alla traslazione orizzontale (ovvero lungo l’asse di versore e 2 ), un equilibrio
alla traslazione verticale (ovvero lungo l’asse di versore e3 ), un equilibrio alla rotazione attorno a un
polo.
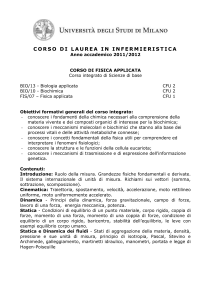
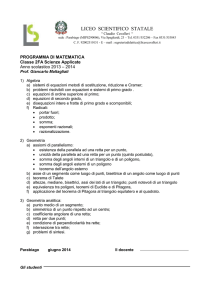
Infatti, nell’esempio di Fig. 6, le equazioni cardinali della statica sono:
R 2 = F4 − F5 = 0
3
R = F1 + F2 − F3 − Rq = 0
M O = F2 ⋅ L − F3 ⋅ L − F4 ⋅ H − Rq ⋅ L = 0
4
dove, per l’equilibrio è stato sostituito al carico uniformemente distribuito q la sua risultante Rq. in
pratica il problema viene ricondotto all’equilibrio di un sistema discreto di forze che a sua volta è
staticamente equivalente a un sistema di forze applicato al polo O e a una coppia.
Fig. 6
8
ANALISI STATICA DEL CORPO RIGIDO VINCOLATO
Lo stesso discorso fatto per il caso del corpo rigido libero soggetto ad un sistema di forze attive può
vincoli può garantire l’equilibrio del corpo soggetto al sistema di forze attive, ovvero senza che queste
risultino necessariamente un sistema di forze equilibrato. In questo caso però è necessario precisare
l’effetto dei vincoli sulla statica del corpo rigido tramite il postulato fondamentale della meccanica
(postulato di Kirchhoff) secondo il quale i vincoli esercitano nei punti del corpo in cui sono applicati
delle forze (e/o delle coppie) concentrate dette reazioni vincolari.
Il sistema di reazioni vincolari agisce dunque sulla frontiera del corpo come un sistema di forze
esterne concentrate dette forze reattive che nascono proprio per impedire lo spostamento del punto
vincolato. Esse sono strettamente legate al tipo di vincolo e sono di numero pari alla molteplicità del
vincolo stesso. Infatti, dal punto di vista statico, si definisce la molteplicità di un vincolo proprio
come il numero di componenti scalari indipendenti delle reazioni vincolari che esso è in grado di
esercitare: vincolo semplice - una sola componente; vincolo doppio – due componenti; vincolo triplo
– tre componenti.
Ciò consente dunque di effettuare la classificazione dei vincoli esterni e dei vincoli interni da un
punto di vista statico, ovvero andando a guardare le reazioni vincolari che il vincolo è in grado di
esplicare.
CARATTERIZZAZIONE STATICA DEI VINCOLI ESTERNI
I vincoli esterni esaminati nell’ambito della caratterizzazione cinematica, vengono qui riesaminati dal
punto di vista statico.
-
Carrello: è un vincolo semplice in grado di esercitare una forza con retta di azione coincidente
con la direzione efficace del carrello e applicata nel punto dove agisce il vincolo.
-
Biella esterna: è un vincolo semplice in grado di esercitare una forza con retta di azione
coincidente con la direzione efficace del carrello e applicata nel punto dove agisce il vincolo.
9
-
Doppio-doppio pendolo: è un vincolo semplice in grado di esercitare una coppia concentrata
nel punto dove insiste il vincolo.
-
Cerniera: è un vincolo doppio in grado di esercitare una forza diretta lungo una qualunque
direzione ed applicata nel punto dove insiste il vincolo.
-
Doppio-pendolo: è un vincolo doppio in grado di esplicare una forza nella direzione efficace
del doppio pendolo applicata nel punto dove agisce il vincolo e una coppia applicata nello
stesso punto.
-
Incastro: è un vincolo triplo in grado di esplicare una forza in una qualunque direzione
applicata nel punto dove agisce il vincolo e una coppia applicata nello stesso punto
È utile osservare che se il vincolo impedisce lo spostamento lungo una direzione, allora la reazione
esplicata dal vincolo lungo questa direzione può essere diversa da zero. Al contrario, nella direzione
lungo la quale il vincolo non è in grado di impedire lo spostamento, necessariamente non nasce alcuna
reazione:
uP =
0 ⇔ RP ≠ 0
uP ≠ 0 ⇔ RP =
0
θ P =0 ⇔ m ≠ 0
θP ≠0⇔ m=
0
CARATTERIZZAZIONE STATICA DEI VINCOLI INTERNI
Per quanto riguarda invece la caratterizzazione statica dei vincoli interni si sottolinea che il loro grado
di molteplicità è legato anche al numero di corpi collegati. Infatti essi esplicano per il principio di
azione e reazione delle azioni eguali e contrarie nei corpi collegati, dette appunto reazioni vincolari
interne.
-
Biella interna: è un vincolo in grado di esercitare due forze uguali e opposte sui due tratti
collegati agenti lungo l’asse della biella.
10
-
Doppio-doppio pendolo interno: è un vincolo in grado di esercitare due coppie uguali e
opposte sui tratti collegati.
-
Cerniera interna: è un vincolo in grado di esplicare due forze uguali e opposte lungo la stessa
direzione.
-
Doppio pendolo: è un vincolo in grado di esplicare due forze uguali e opposte agenti lungo la
direzione efficace del doppio pendolo e due coppie uguali e opposte
(Tabella vincoli)
PROBLEMA STATICO NEL CASO DI CORPO RIGIDO VINCOLATO
Nel caso di un corpo rigido vincolato, ovvero di un sistema di corpi rigidi vincolati sia tramite vincoli
esterni sia tramite vincoli interni, soggetto ad un sistema di forze attive (dette anche forze esterne),
l’equilibrio chiama in gioco sia queste forze sia le reazioni vincolari (incognite) che vengono appunto
viste come un ulteriore sistema di forze agenti sulla frontiera del corpo (o dei corpi), dette appunto
sistema di forze reattive.
In questo caso le equazioni cardinali della statica assumono la seguente forma:
R = R esterne + R reattive = 0
esterne
reattive
+MO
=0
M O = M O
e, considerando un sistema piano, diventano sempre le tre equazioni di equilibrio:
R 2 = R esterne ,2 + R reattive ,2 = 0
3
esterne ,3
+ R reattive ,3 = 0
R = R
esterne
+ M Oreattive = 0
M O = M O
Ovvero un sistema di tre equazioni nelle s incognite reazioni vincolari esplicate dai vincoli.
Questo sistema può essere posto nella seguente forma:
A R = −R
V
e
oppure nella forma:
A R =f
V
a
11
dove:
A è una matrice di ordine 3nt × s , detta anche matrice di equilibrio, dove nt è il numero di tratti
collegati ed s la molteplicità totale dei vincoli;
f il vettore delle forze attive agenti sul corpo di ordine s × 1 ;
a
R il vettore delle reazioni vincolari incognite di ordine s × 1 .
V
L’esame di questo sistema consente di effettuare una classificazione statica della struttura, ovvero di
capire quando il problema ammette soluzione e quando tale soluzione è unica.
l 3nt − R( A) e il grado di iperstaticità:
Per un sistema di nt tratti, si introducono il grado di labilità:=
i= s − R( A) .
Per la classificazione statica delle strutture si utilizza il teorema di Roché-Capelli e quindi si valuta
( )
a
la matrice aggiunta A0 = A f , se R ( A ) = R A0
esiste la soluzione del sistema, se
( )
R ( A ) < R A0 non esiste la soluzione del sistema.
Si possono individuare i seguenti casi:
−
s = 3nt condizione necessaria di isostaticità:
•
det( A) ≠ 0 ( R ( A) = 3nt )→
=
l 0,=
i 0 : il sistema è staticamente determinato, ha
soluzione unica e determinata, ovvero tramite le equazioni cardinali della statica si
riescono a determinare le reazioni vincolari per qualsiasi carico applicato: la struttura si
dice isostatica;
•
det( A) = 0 ( R ( A) < 3nt )→ l > 0, i > 0 : la struttura è labile ed iperstatica possono
verificarsi due casi:
( )
1. R ( A ) = R A0 il sistema è staticamente indeterminato: esistono infinite soluzioni
∞i del sistema per questa particolare condizione di carico, ma l’unica soluzione
meccanicamente valida non è possibile valutarla tramite le sole equazioni cardinali
12
della statica, bisognerà considerare la deformabilità delle travi; il modello di corpo
rigido non consente di determinare le reazioni vincolari con le equazioni cardinali
della statica.
( )
2. R ( A ) < R A0 : il sistema è staticamente degenere, non esistono soluzioni del
sistema.
−
condizione sufficiente di iperstaticità → i > 0 :
s > 3nt
•
R ( A) = 3nt =
→ l 0, i > 0 :
il sistema è staticamente indeterminato, esistono infinite
soluzioni ∞i del sistema per ogni condizione di carico, ma l’unica soluzione
meccanicamente valida non è possibile valutarla tramite le sole equazioni cardinali della
statica, bisognerà considerare la deformabilità delle travi; il modello di corpo rigido non
consente di determinare le reazioni vincolari con le equazioni cardinali della statica, la
struttura si dice iperstatica;
•
R ( A) < 3nt →
l > 0, i > 0 : la struttura è labile ed iperstatica possono verificarsi due
casi:
( )
1. R ( A ) = R A0 il sistema è staticamente indeterminato: esistono infinite soluzioni
∞i del sistema per questa particolare condizione di carico, ma l’unica soluzione
meccanicamente valida non è possibile valutarla tramite le sole equazioni cardinali
della statica, bisognerà considerare la deformabilità delle travi; il modello di corpo
rigido non consente di determinare le reazioni vincolari con le equazioni cardinali
della statica.
( )
2. R ( A ) < R A0 : il sistema è staticamente degenere, non esistono soluzioni del
sistema.
−
s < 3nt condizione sufficiente di labilità→ l > 0 :
la struttura è labile per insufficienza di
vincoli:
13
•
R ( A) = s → l > 0, i =
0 : la struttura è labile possono verificarsi due casi:
( )
1. R ( A ) = R A0
il sistema è staticamente determinato: ha soluzione unica e
determinata, ovvero tramite le equazioni cardinali della statica si riescono a
determinare le reazioni vincolari per questa particolare condizione di carico;
( )
2. R ( A ) < R A0 : il sistema è staticamente degenere, non esistono soluzioni del
sistema.
•
R ( A) < s →
l > 0, i > 0 : la struttura è labile ed iperstatica possono verificarsi due
casi:
( )
1. R ( A ) = R A0 il sistema è staticamente indeterminato: esistono infinite soluzioni
∞i del sistema per questa particolare condizione di carico, ma l’unica soluzione
meccanicamente valida non è possibile valutarla tramite le sole equazioni cardinali
della statica, bisognerà considerare la deformabilità delle travi; il modello di corpo
rigido non consente di determinare le reazioni vincolari con le equazioni cardinali
della statica.
( )
2. R ( A ) < R A0 : il sistema è staticamente degenere, non esistono soluzioni del
sistema.
14
TAB.1 - CLASSIFICAZIONE STATICA VINCOLI ESTERNI
vincolo
simbolo
molteplicità
reazioni vincolari
carrello
1
FPn ≠ 0
biella
1
FPn ≠ 0
doppio-doppio pendolo
1
mP ≠ 0
cerniera
2
FP ≠ 0
vi
vi
FPn ≠ 0
vi
doppio-pendolo
2
incastro
3
mP ≠ 0
FP ≠ 0
mP ≠ 0
15
TAB.2 - CLASSIFICAZIONE STATICA VINCOLI INTERNI
vincolo
simbolo
molteplicità*
reazioni vincolari
Biella interna
1
FPn ≠ 0
doppio-doppio pendolo interno
1
mP ≠ 0
cerniera interna
2
FP ≠ 0
vi
FPn ≠ 0
vi
doppio-pendolo interno
2
mP ≠ 0
*la molteplicità del vincolo interno è altresì legata al numero di tratti che vi convergono.
16