Beschneiden:
Oben: 61,5 mm
Unten: 61,5 mm
Links: 43,5 mm
Rechts: 43,5 mm
Controller
Descrizione
Descrizione del
sistema
Tipo
CMXR-C1
Descrizione
560 313
it 0909a
[748 983]
Edizione _____________________________________________________________ it 0909a
Definizione ___________________________________________________ GDCP-CMXR-SY-IT
Numero di ordinazione _________________________________________________ 560 313
Festo AG & Co KG, D-73726 Esslingen, 2009
Internet:
http://www.festo.com
E-Mail:
[email protected]
È vietata la riproduzione, distribuzione e diffusione a terzi, nonché l'uso arbitrario, totale o
parziale del contenuto della presente documentazione senza la preventiva autorizzazione
scritta della Festo. Qualsiasi infrazione comporta il risarcimento di danni. Tutti i diritti riservati, ivi compreso il diritto di deposito brevetti, modelli registrati o di design.
Festo GDCP-CMXR-SY-IT 0909a
3
Legenda delle revisioni
Compilato da:
Nome del manuale:
GDCP-CMXR-SY-IT
Nome del file:
Percorso del file:
N. prog.
Descrizione
Indice revisioni
Data di modifica
001
Stesura
it 0805NH
07.07.2008
oo2
Update
0909a
25.08.2009
4
Festo GDCP-CMXR-SY-IT 0909a
INDICE
INDICE
1.
Introduzione ............................................................................................................ 8
1.1
Termini utilizzati .................................................................................................... 8
2.
Avvertenze di sicurezza .......................................................................................... 9
2.1
Uso della documentazione .................................................................................... 9
2.2
Impiego conforme alle prescrizioni ........................................................................ 9
2.3
Personale qualificato ........................................................................................... 10
2.4
Avvertenze di sicurezza relative a questo manuale ............................................. 10
2.5
Avvertenze di sicurezza relative ai prodotti ......................................................... 10
2.6
Istruzioni di sicurezza per il prodotto descritto ................................................... 11
3.
Controller multiassiale modulare CMXR .............................................................. 13
3.1
Unità centrale CMXR-C1....................................................................................... 13
3.1.1
Interfacce CAN ..................................................................................... 14
3.2
Scheda di memoria .............................................................................................. 15
3.3
Impianto dei file .................................................................................................. 16
3.4
Cartella application ............................................................................................. 17
3.5
Indirizzo IP alla fornitura...................................................................................... 17
3.6
Moduli periferici .................................................................................................. 18
3.6.1
Indirizzamento dei moduli periferici..................................................... 19
3.6.2
Connettori del pannello frontale .......................................................... 20
3.7
Periferia su interfaccia CAN X4 ............................................................................ 21
4.
Configurazione con FCT ......................................................................................... 22
5.
Programmazione, Festo Teach Language (FTL) .................................................... 23
5.1
Elaborazione del programma............................................................................... 24
5.1.1
Download di programmi FTL ................................................................ 24
6.
Unità di comando manuale CDSA-D1-VX .............................................................. 26
6.1
Installazione ........................................................................................................ 28
6.2
Scatola di accensione CAMI-C.............................................................................. 29
6.3
Disinnesto del dispositivo di comando manuale ................................................. 29
6.4
Panoramica hardware.......................................................................................... 31
6.5
Software .............................................................................................................. 31
6.6
Diritti dell'utente ................................................................................................. 33
6.6.1
Livelli utente ........................................................................................ 33
6.6.2
Utente impostato alla fornitura ............................................................ 35
6.7
Comunicazione con il controller multiassiale CMXR ............................................ 36
Festo GDCP-CMXR-SY-IT 0909a
5
INDICE
6.7.1
Sincronizzazione software di dialogo ................................................... 37
6.8
Indirizzi IP alla fornitura....................................................................................... 37
6.9
Controllo dello schermo ...................................................................................... 38
6.10
Emulazione CDSA ................................................................................................ 38
7.
Sistemi di azionamento ........................................................................................ 39
7.1
Impostazione configurazione servo ..................................................................... 39
7.2
Indirizzo bus CAN controllori motore ................................................................... 39
7.3
Corsa di riferimento ............................................................................................. 40
8.
Modi operativi ....................................................................................................... 41
8.1
Azionamento manuale ......................................................................................... 41
8.2
Funzionamento automatico ................................................................................. 42
8.3
Arresto della cinematica, stop di emergenza ....................................................... 42
8.4
Riposizionamento................................................................................................ 44
9.
Metodo di controllo .............................................................................................. 46
9.1
Funzionamento senza unità di comando esterna................................................. 46
9.1.1
Segnali di sistema................................................................................ 48
9.2
Unità di comando esterna su interfaccia I/O digitale ........................................... 48
9.2.1
Funzioni dell'interfaccia I/O ................................................................. 50
9.3
Unità di comando esterna su PROFIBUS DP......................................................... 50
9.3.1
Segnali di sistema................................................................................ 52
9.3.2
Funzioni dell'interfaccia PROFIBUS ...................................................... 53
9.3.3
Interfaccia nel programma FTL ............................................................. 53
9.4
Diritto di scrittura e comando di livello superiore ................................................ 54
9.4.1
Funzionamento .................................................................................... 55
9.4.2
Level utente ......................................................................................... 56
9.4.3
Influenza del comando di livello superiore .......................................... 56
9.4.4
Esempio di integrazione....................................................................... 57
10.
Sistemi di coordinate ............................................................................................ 58
10.1
Sistemi di coordinate assiali ................................................................................ 58
10.2
Sistemi di coordinate cartesiane ......................................................................... 58
10.2.1 Assi di traslazione X, Y, Z ..................................................................... 58
10.2.2 Assi di orientamento A, B, C ................................................................. 59
10.2.3 Orientamento di Eulero ZYZ ................................................................. 60
10.3
Sistemi di coordinate della cinematica ................................................................ 60
10.3.1 Sistema delle coordinate di base ......................................................... 60
10.3.2 Sistema di coordinate globali .............................................................. 62
10.3.3 Sistema di coordinate utensile ............................................................ 64
6
Festo GDCP-CMXR-SY-IT 0909a
INDICE
10.3.4
Operazioni con il sistema di coordinate utensile.................................. 64
11.
Cinematiche supportate ........................................................................................ 66
11.1
Struttura di cinematiche ...................................................................................... 66
11.1.1 Assi fondamentali ................................................................................ 66
11.1.2 Assi di orientamento, assi mano .......................................................... 67
11.1.3 Inseguimento degli assi di orientamento ............................................. 67
11.1.4 Interpolazione degli assi di orientamento ............................................ 68
11.1.5 Assi mano elettrici e pneumatici .......................................................... 72
11.1.6 Assi ausiliari ........................................................................................ 72
11.1.7 Programmazione di assi mano e assi ausiliari...................................... 73
11.1.8 Denominazione della sequenza degli assi nelle cinematiche ............... 74
11.2
Portale lineare cartesiano .................................................................................... 74
11.3
Portale cartesiano a sbalzo ................................................................................. 76
11.4
Portale tridimensionale cartesiano ...................................................................... 78
11.5
Cinematica tripod ................................................................................................ 80
11.5.1 Origine del sistema di coordinate globali ............................................. 81
11.6
Interpolazione assiale ......................................................................................... 83
11.7
Panoramica di tutte le cinematiche supportate ................................................... 84
Festo GDCP-CMXR-SY-IT 0909a
7
1. Introduzione
1.
Introduzione
Questo documento descrive il sistema “Controller multiassiale Festo CMXR con funzioni
robotiche” con versione del software 1.2. Oltre al controller multiassiale vero e proprio
fanno parte del sistema anche l'unità di comando manuale CDSA-D1-VX e la sua
emulazione mediante software come applicazione PC.
Controller multiassiale CMXR-C1
1.1
Dispositivo di comando manuale
CDSA-D1-VX
Termini utilizzati
Definizione
Significato
Unità centrale
Apparecchio base del controller multiassiale CMXR
Controller multiassiale
Unità centrale con moduli periferici inseriti
Scheda di memoria
Compact Flash Card CF Type I
FTL
Festo Teach Language, linguaggio di programmazione orientato al
movimento per il controller multiassiale CMXR
TCP
Tool Center Point
DriveBus
Canale di comunicazione tra controller multiassiale CMXR e controllori
motore Festo su base CANopen DS402
Festo Configuration Tool (FCT) Software di parametrizzazione e messa in funzione per attuatori Festo
(anche software FCT)
FCT PlugIn
Modulo software per un determinato dispositivo nel Festo Configuration
Tool (FCT)
Unità di comando manuale
CDSA-D1-VX come messa in funzione e unità operativa
Emulazione CDSA
Emulazione della funzione dell'unità di comando manuale su un PC
8
Festo GDCP-CMXR-SY-IT 0909a
2. Avvertenze di sicurezza
2.
Avvertenze di sicurezza
2.1
Uso della documentazione
Questo documento è redatto per operatori e programmatori di strutture multiassiali e
robot che lavorano con il controller multiassiale Festo CMXR. Esiste un'introduzione all'uso
e alla programmazione. Si richiede un addestramento specifico del personale.
2.2
Impiego conforme alle prescrizioni
Avvertenza
Il controller multiassiale Festo CMXR non è previsto per compiti di
automazione rilevanti per la sicurezza (ad es.: arresto in caso di
emergenza o monitoraggio di velocità ridotte).
Il controller multiassiale Festo CMXR corrisponde secondo EN ISO
13849-1 alla categoria B e quindi non è sufficiente per la
realizzazione di funzioni di sicurezza per la protezione personale.
Per i compiti di automazione rilevanti per la sicurezza o per
l'incolumità delle persone occorre adottare misure di sicurezza
esterne supplementari che anche in caso di errore garantiscono
uno stato di esercizio sicuro dell'intero sistema.
Festo non si assume alcuna responsabilità per danni dovuti a inosservanza delle avvertenze
riportate nelle presenti istruzioni per l'uso.
Nota
Prima della messa in funzione leggere attentamente le avvertenze
di sicurezza relative ai prodotti, capitolo 2.5, e le avvertenze di
sicurezza relative a questo manuale, capitolo 2.6.
Nel caso in cui la documentazione in questa lingua non sia perfettamente comprensibile,
contattare il fornitore e informarlo al riguardo.
Il funzionamento perfetto e sicuro del sistema di comando presuppone conformità e adeguatezza di trasporto, magazzinaggio, assemblaggio e installazione, nonché accuratezza
di comando e manutenzione.
Festo GDCP-CMXR-SY-IT 0909a
9
2. Avvertenze di sicurezza
2.3
Personale qualificato
Nota
Gli impianti elettrici devono essere azionati esclusivamente da
personale addestrato e qualificato.
2.4
Avvertenze di sicurezza relative a questo manuale
Avvertenza
PERICOLO !
L'inosservanza di quanto indicato può causare gravi danni materiali
e lesioni personali.
Attenzione
L'inosservanza di quanto indicato può causare ingenti danni
materiali.
2.5
Avvertenze di sicurezza relative ai prodotti
Avvertenza
PERICOLO !
Per lo smaltimento delle batterie attenersi alle disposizioni relative
ai rifiuti tossici.
Nonostante le batterie siano a bassa tensione, in caso di cortocircuito possono emettere corrente sufficiente a incendiare materiali
combustibili. Non devono quindi essere smaltite insieme a materiali
conduttori (quali ad es. limatura di ferro, lana metallica impregnata
di olio, ecc.).
Componenti sensibili alle correnti elettrostatiche: la manipolazione
impropria di tali componenti ne può causare il danneggiamento.
Informazioni
Le indicazioni per un'installazione elettromagneticamente compatibile sono riportate nel manuale del prodotto!
10
Festo GDCP-CMXR-SY-IT 0909a
2. Avvertenze di sicurezza
Avvertenza
PERICOLO !
Movimenti pericolosi!
Pericolo di morte, di gravi lesioni personali o di danni materiali in
caso di movimenti incontrollati degli assi!
2.6
Istruzioni di sicurezza per il prodotto descritto
Avvertenza
Pericolo!
Pericolo di morte per circuiti di arresto di emergenza insufficienti!
I circuiti di arresto di emergenza devono rimanere attivi in tutti i
modi operativi dell'impianto e raggiungibili. Lo sblocco del circuito
di arresto di emergenza non deve causare un riavvio incontrollato
dell'impianto!
Prima verificare la catena degli stop di emergenza, poi azionare!
Avvertenza
PERICOLO !
Pericolo per persone e cose!
Testare ogni nuovo programma, prima di mettere in funzione
l'impianto!
Avvertenza
PERICOLO !
Potenziamenti di attrezzature e modifiche possono pregiudicare la
sicurezza del sistema!
Le conseguenze possono essere gravi danni alle persone, alle cose
o all'ambiente. Eventuali potenziamenti di attrezzature o modifiche
dell'impianto con componenti di altri produttori devono quindi
essere abilitati da Festo.
Festo GDCP-CMXR-SY-IT 0909a
11
2. Avvertenze di sicurezza
Avvertenza
PERICOLO !
Tensione elettrica pericolosa!
Se non indicato diversamente, gli interventi di manutenzione vanno
eseguiti in linea di massima solo a impianto spento! Occorre inoltre
assicurare l'impianto contro reinserimenti non autorizzati o non
intenzionali.
Se l'impianto richiede interventi di misurazione o di collaudo, essi
devono essere effettuati da elettricisti specializzati.
Attenzione
Si devono utilizzare solo pezzi di ricambio omologati da Festo.
12
Festo GDCP-CMXR-SY-IT 0909a
3. Controller multiassiale modulare CMXR
3.
Controller multiassiale modulare CMXR
Il controller multiassiale CMXR è un sistema di comando modulare composto da un'unità
centrale CMXR-C1, da moduli di ingresso/uscita, da Fieldbus e da un dispositivo di comando
manuale. L'unità di controllo multiassiale CMXR serve a controllare cinematiche composte
dai sistemi modulari di manipolazione Festo, assi supplementari e periferiche. La programmazione si esegue in lingua FTL (Festo Teach Language).
Dispositivo di
comando manuale
CMXR
Cinematica
Valvole
Attuatori
elettrici
Pinze
Nota
Tutti gli esempi e le applicazioni indicate nel manuale non sono
vincolanti e sono senza pretesa di correttezza e completezza.
Nell'utilizzare il controller multiassiale CMXR osservare tutte le
disposizioni necessarie.
3.1
Unità centrale CMXR-C1
L'unità centrale CMXR-C1 è un gruppo a processore che è responsabile per l'elaborazione
dei programmi FTL. Il volume di fornitura comprende:
2 interfacce CAN-Bus, di cui CAN X6 è riservata per il Festo DriveBus
una interfaccia Ethernet
una scheda di memoria CF tipo I, grandezza 256 MB
Festo GDCP-CMXR-SY-IT 0909a
13
3. Controller multiassiale modulare CMXR
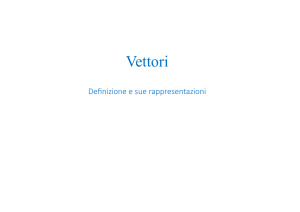
1 Alimentazione
di tensione 24 V CC
2
3
4
5
2 Display a
7 segmenti
3 CAN X4,
periferia
4 Ethernet
1
6
5 CAN X6,
DriveBus
7
6 Scheda di
memoria
7 Interfaccia USB
Fig. 3.1 Struttura di un sistema a multiassi con controller multiassiale CMXR (esempio)
Definizione
Significato
CAN X6, DriveBus
Interfaccia per i regolatori degli attuatori
CAN X4, periferia
Attacco per periferiche, ad es. unità di valvole
Scheda di memoria
Memoria dati dell'unità centrale
Interfaccia USB
Porta USB per salvare e recuperare programmi, nonché per estrarre
informazioni diagnostiche in caso di assistenza. Per informazioni più dettagliate
fare riferimento al manuale del software CDSA.
Ethernet
Interfaccia ad es. per dispositivo di comando manuale, programmazione
Display a 7 segmenti
Informazioni per la diagnosi
Alimentazione di
tensione
Alimentazione di tensione 24 V CC
Tabella 3.1 Unità centrale CMXR-C1
Nota
Per ridurre al minimo il carico della rete Ethernet, si consiglia l'uso
di uno switch Ethernet intelligente.
3.1.1
Interfacce CAN
L'interfaccia CAN X6 del CMXR-C1 è riservata per la comunicazione dell'attuatore mediante
DriveBus. Non è possibile altro utilizzo.
Mediante l'interfaccia CAN X4 è possibile collegare una ulteriore periferia come l'unità di
valvole CPV oppure unità I/O elettriche di Festo. La configurazione dei segnali si esegue
con il Festo Configuration Tool (FCT).
14
Festo GDCP-CMXR-SY-IT 0909a
3. Controller multiassiale modulare CMXR
3.2
Scheda di memoria
I dati della CMXR-C1 vengono salvati su una scheda di memoria. Essa contiene tutti i dati
necessari al funzionamento, quali ad es. sistema operativo, dati di configurazione e programmi di movimento.
La scheda di memoria si inserisce nell'apposito slot dell'unità centrale CMXR. Durante il
funzionamento non è consentito estrarre e inserire la scheda.
Nota
Per estrarre la scheda di memoria occorre sempre disinserire la
tensione di rete dall'unità centrale CMXR. Non è consentita
l'estrazione sotto tensione.
Sul mercato ci sono numerose versioni e molti produttori di schede di memoria, le quali
tuttavia si differenziano per le prestazioni e per i cicli di scrittura affidabili. Per questo
motivo si consigliano schede di memoria speciali per l'esercizio del controller multiassiale
CMXR. Per le tipologie consultare la descrizione hardware dell'unità centrale CMXR-C1.
Per creare copie di sicurezza, si può semplicemente copiare la scheda di memoria mediante
un PC con un lettore di schede o mediante il Festo Configuration Tool (FCT).
Se si verifica un guasto all'hardware del CMXR o alla scheda di memoria, è sufficiente sostituire il pezzo guasto. Per la sostituzione non servono software supplementari o un PC.
In caso di assistenza si può avere velocemente una sostituzione.
Attenzione
La scheda di memoria è un luogo di memorizzazione dei dati del
controller multiassiale CMXR. L'utilizzo di questo supporto dati non
è consentito per altri scopi che ne pregiudicherebbero l'affidabilità.
Festo GDCP-CMXR-SY-IT 0909a
15
3. Controller multiassiale modulare CMXR
3.3
Impianto dei file
La scheda di memoria dispone di una struttura a cartelle, in cui si archiviano i dati necessari,
quali ad es. configurazione, dati di programma e dati di sistema. Queste cartelle vengono
create al momento dell'installazione del controller multiassiale CMXR e non possono
essere modificate o integrate. L'affidabilità del sistema, altrimenti, può non essere più
garantita.
Attenzione
La struttura a cartelle necessaria viene creata al momento
dell'installazione del controller multiassiale CMXR. Essa non deve
essere né modificata, né integrata. In caso di manipolazione non si
garantisce l'affidabilità.
Figura della struttura a cartelle sulla scheda di memoria:
Nome della cartella
Significato
application
Archiviazione di tutti i dati utente, quali configurazione, programmi e dati di
programma
protocol
Archiviazione di file di report
retain
Cartella di sistema
system
Cartella di sistema
systemsettings
Cartella di sistema
terminal
Cartella di sistema
Tabella 3.2 Cartelle di file sulla scheda di memoria
Nella cartella “application” sono archiviati tutti i dati necessari per l'applicazione. Ciò
riguarda la configurazione del controller multiassiale CMXR, tutti i progetti e i programmi
FTL dell'applicazione.
Nota
Con l'ausilio del Festo Configuration Tool (FCT) si creano tutti i dati
di sistema necessari all'esercizio, la configurazione e i programmi
FTL e si carica tutto sulla scheda di memoria.
16
Festo GDCP-CMXR-SY-IT 0909a
3. Controller multiassiale modulare CMXR
3.4
Cartella application
Nella cartella “application\control” sono archiviati tutti i dati di configurazione e i dati dei
progetti e dei programmi FTL.
Figura della struttura a cartelle, cartella application:
La cartella application comprende una sottocartella “control”. Essa si suddivide nelle
cartelle seguenti:
Nome della cartella
Significato
config
Cartella di destinazione della configurazione
dell'applicazione
ieccontrol
non in uso
teachcontrol
contiene tutti i progetti FTL
text
contiene alcuni messaggi di testo dell'applicazione
Tabella 3.3 Cartella application
La cartella “teachcontrol” comprende tutti i progetti FTL, ognuno dei quali è rappresentato
con una cartella. In questa cartella di progetto si trovano tutti i programmi FTL subordinati
al progetto. Nella grafica di cui sopra sono riportati, a titolo di esempio, i progetti
“_global” e “cube”.
3.5
Indirizzo IP alla fornitura
Allo stato di fornitura il controller multiassiale CMXR dispone di un'installazione minima
sulla scheda di memoria, in modo da poter creare la connessione di rete dopo il collegamento all'alimentazione di tensione. Le impostazioni di rete sono preassegnate come
segue:
Parametri di rete
Valore
Indirizzo IP
192.168.100.100
Subnet Mask
255.255.255.0
Indirizzo gateway
0.0.0.0
Tabella 3.4 parametri di rete preimpostati
Per creare un collegamento con il controller multiassiale CMXR, eseguire sul PC le impostazioni di rete adeguate.
Festo GDCP-CMXR-SY-IT 0909a
17
3. Controller multiassiale modulare CMXR
Nota
Il controller multiassiale CMXR non è idoneo al DHCP.
Il controller multiassiale non può ricevere alcun indirizzo IP da un
server DHCP, ma deve essere configurato mediante FCT.
3.6
Moduli periferici
Il controller multiassiale CMXR modulare si può ampliare con moduli periferici che si innestano sul lato destro dell'unità centrale. Il collegamento dei moduli avviene tramite il bus
di sistema che si crea con un contatto a innesto.
Il posto di un modulo periferico si può scegliere liberamente. Poiché ogni modulo ha un
proprio indirizzo, è chiaramente associabile. Sul controller multiassiale CMXR si possono
innestare max. 8 moduli periferici.
Definizione
Significato
CMXR-C1
Unità centrale
CECX-D-16E
Modulo di ingresso digitale con 16 ingressi
CECX-D-14A-2
Modulo di uscita digitale con 14 uscite, 2 A caricabili, disinserimento gruppo
CECX-D-8E8A-NP-2
Modulo misto digitale con 8 ingressi e 8 uscite, uscite caricabili con 2 A
CECX-A-4E4A-V
Modulo analogico con 4 ingressi (14 bit), 4 uscite (12 bit) per tensione
CECX-A-4E4A-A
Modulo analogico con 4 ingressi, 4 uscite per corrente
CECX-C-2G2
Modulo encoder con 2 ingressi
CECX-F-PB-S-V0
Modulo slave PROFIBUS DP V0
Tabella 3.5 Moduli periferici sistema CMXR
Nota
Gli 8 moduli max. possibili possono essere un assortimento dei
moduli periferici elencati. Unica eccezione è il modulo slave
PROFIBUS che si può usare nel sistema solo una volta.
18
Festo GDCP-CMXR-SY-IT 0909a
3. Controller multiassiale modulare CMXR
Esempi di moduli periferici:
CDCX-D-8E8A-NP-2
CECX-F-PB-S-V0
Modulo misto digitale con 8 ingressi e 8 uscite
Modulo slave PROFIBUS DPV0
Nota
La progettazione dei moduli si delinea mediante il Festo Configuration
Tool (FCT).
Per l'utilizzo dei moduli in programmi FTL consultare il manuale di
programmazione del CMXR.
3.6.1
Indirizzamento dei moduli periferici
Ogni modulo periferico possiede un interruttore di indirizzo che si trova sotto alla chiusura.
Con l'ausilio di uno strumento idoneo si imposta l'indirizzo del modulo sull'interruttore di
indirizzo che si presenta come interruttore rotante.
Vale che:
Ogni indirizzo può comparire solo una volta nell'ambito di un tipo di modulo.
Sono ammessi indirizzi analoghi con moduli diversi.
Nota
Unica eccezione è data dal modulo slave PROFIBUS che non ha un
interruttore di indirizzo, perché nel sistema se ne può installare uno
solo.
Festo GDCP-CMXR-SY-IT 0909a
19
3. Controller multiassiale modulare CMXR
1 Connettore bus
(dietro piastra
copertura)
1
2 Rientranza per
guida profilata
2
3 Interruttore di
indirizzo (indirizzo
del modulo)
4 Leva di
bloccaggio per
guide profilate
3.6.2
3
4
Connettori del pannello frontale
Per l'alimentazione di tensione e per il collegamento delle linee di segnalazione digitali
e analogiche sono necessari connettori standard con una dimensione della griglia di
5,08 mm. I segnali dell'encoder si collegano con un connettore SUB-D, i Fieldbus CAN e
PROFIBUS con un connettore Fieldbus idoneo consentito.
Le seguenti tabelle contengono le combinazioni di connessioni necessarie e una selezione
consigliata di connettori. In base alle esigenze si può selezionare un diverso numero di
poli.
Definizione
Quantità
Significato
CMXR-C1
1
1
a 2 poli per alimentazione di tensione
SUB-D a 9 poli (presa) per ogni bus CAN
CECX-D-16E
1
2
a 2 poli per alimentazione di tensione
a 8 poli per segnali
CECX-D-14A-2
2
1
1
a 2 poli per alimentazione di tensione
a 8 poli per segnali
a 6 poli per segnali
CECX-D-8E8A-NP-2
1
2
a 2 poli per alimentazione di tensione
a 8 poli per segnali
CECX-A-4E4A-V
1
2
a 2 poli per alimentazione di tensione
a 8 poli per segnali
CECX-A-4E4A-A
1
2
a 2 poli per alimentazione di tensione
a 8 poli per segnali
CECX-C-2G2
1
1
2
a 2 poli per alimentazione di tensione
a 2 poli per segnali latch
SUB-D a 9 poli (presa) per encoder
CECX-F-PB-S-V0
1
Connettore PROFIBUS con resistenza terminale
attivabile
Tabella 3.6 Connettore per modulo periferico su CMXR-C1
20
Festo GDCP-CMXR-SY-IT 0909a
3. Controller multiassiale modulare CMXR
Nota
Per il collegamento dell'alimentazione di tensione si consiglia l'uso
di connettori a 2 poli. Se si devono disinserire linee di segnalazione
durante la messa in funzione, si mantiene l'alimentazione di tensione dei moduli.
Panoramica dei connettori disponibili:
Definizione
Significato
NECC-L1G2-C1
connettore a 2 poli con morsetto a molla
NECC-L1G4-C1
connettore a 4 poli con morsetto a molla
NECC-L1G6-C1
connettore a 6 poli con morsetto a molla
NECC-L1G8-C1
connettore a 8 poli con morsetto a molla
NECC-L1G18-C1
connettore a 18 poli con morsetto a molla
FBS-SUB-9-WS-PB-K
connettore SUB-D a 9 poli per PROFIBUS senza resistenza terminale
FBS-SUB-9-WS-CO-K
connettore SUB-D a 9 poli per bus CAN senza resistenza terminale
Tabella 3.7 Connettori moduli periferici
Figura Connettore a 8 poli NECC-L1G8-C1 con morsetto a molla
3.7
Periferia su interfaccia CAN X4
Mediante l'interfaccia CAN X4 è possibile collegare una periferia di processo come l'unità
di valvole oppure moduli I/O di Festo. I dispositivi devono supportare CANopen DS 301.
Il gruppo dei così detti “I/O ciclici” comprende tutte le unità con ingressi/uscite puramente
digitali. Vengono supportate fino a 32 ingressi digitali e 32 uscite digitali.
La configurazione dei segnali si esegue con un PlugIn FCT.
Il gruppo dei dispositivi “aciclici” consente, in linea di principio, il collegamento di tutti gli
apparecchi che soddisfano CANopen. Con tali dispositivi si può comunicare solo mediante
accessi SDO. Per ulteriori informazioni consultare il manuale di programmazione del CMXR.
Festo GDCP-CMXR-SY-IT 0909a
21
4. Configurazione con FCT
4.
Configurazione con FCT
La configurazione del controller multiassiale CMXR si esegue con il Festo Configuration
Tool (FCT). Questo software dispone di pagine di dialogo grafiche per l'immissione guidata
dei dati richiesti.
Esempio di una pagina grafica di configurazione:
Con il Festo Configuration Tool (FCT) si delinea ad esempio la configurazione di
unità centrale CMXR,
segnali della periferica,
metodo di controllo,
selezione della cinematica,
dati della dinamica assiale.
Per ulteriori informazioni consultare la documentazione del PlugIn del CMXR nel Festo
Configuration Tool (FCT).
22
Festo GDCP-CMXR-SY-IT 0909a
5. Programmazione, Festo Teach Language (FTL)
5.
Programmazione, Festo Teach Language (FTL)
I programmi di movimento sono redatti con il linguaggio di programmazione delle macro
testuale FTL (Festo Teach Language). FTL mette a disposizione un set di istruzioni efficiente,
ad esempio per movimenti, dinamica, diramazioni, cicli iterativi e per l'integrazione di
segnali di periferiche. Nel controller multiassiale CMXR, un dispositivo di interpretazione
elabora il programma FTL.
La programmazione dei programmi FTL può avvenire off line e on line. Per la programmazione off line si ha a disposizione l'editor FTL nel Festo Configuration Tool (FCT). Una programmazione on line si esegue con il dispositivo di comando manuale mobile CDSA-D1-VX.
Per maggiori informazioni consultare il manuale di programmazione del CMXR.
Esempio di programma FTL – rappresentato nel PlugIn FCT
Esempio di programma FTL – rappresentato sul dispositivo di comando CDSA-D1-VX:
Festo GDCP-CMXR-SY-IT 0909a
23
5. Programmazione, Festo Teach Language (FTL)
5.1
Elaborazione del programma
Un programma FTL si elabora nel controller multiassiale CMXR con un dispositivo di interpretazione. Ciò consente variazioni del programma molto rapide che agiscono subito.
I programmi FTL non vengono elaborati dalla scheda di memoria, ma da una memoria interna del CMXR. Per avviare un programma, occorre innanzitutto caricarlo dalla scheda di
memoria. Terminato questo processo di caricamento, è pronto per l'avvio.
Nota
Il numero massimo di posizioni in un progetto, considerato il limite
della capacità di memoria, è pari a ca. 1500. Il superamento della
capacità di memoria è segnalato come errore.
5.1.1
Download di programmi FTL
I programmi FTL vengono generalmente creati mediante CMXR-PlugIn nel Festo Configuration Tool (FCT) e poi trasmessi via Download sulla scheda di memoria del CMXR-C1.
La scheda di memoria si può anche collegare a un PC mediante Ethernet e con l'ausilio
dell'indirizzo IP dell'unità centrale del CMXR. Con questo collegamento si possono caricare
i programmi FTL sulla scheda di memoria. Tali programmi possono essere caricati e avviati
da un'unità di comando esterna. Per avviare i programmi dall'unità di comando manuale si
deve scaricare tutto il progetto e poi caricarlo nuovamente.
In questo caso bisogna fare attenzione che tutti i progetti FTL vengano caricati nella cartella
application\teachcontrol. Non è ammesso l'utilizzo e la creazione di altre cartelle.
Frequenti accessi per scrittura, inoltre, incidono sulla durata della scheda di memoria.
Nota
Occorre accertarsi che durante il download non ci siano sovrascrittura e contemporaneo caricamento di un programma nel controller
multiassiale CMXR.
Se un download e un avvio di programmi FTL dovessero svolgersi in modo automatico,
assicurarsi con interblocchi che non si verifichino anomalie. Lo si può fare ad esempio
mediante un'interfaccia in un sistema superiore.
Se sulla scheda di memoria si copia un progetto che è già caricato nella memoria dell'unità
di comando CMXR, esso non viene aggiornato. Per caricare il nuovo progetto dalla scheda
di memoria nella memoria dell'unità di comando CMXR, è necessario chiudere il progetto
attivo (lo si scarica) e ricaricarlo. Questo procedimento si può effettuare da una maschera
di progetto del dispositivo di comando manuale o da un'unità di comando esterna.
24
Festo GDCP-CMXR-SY-IT 0909a
5. Programmazione, Festo Teach Language (FTL)
Nota
Un progetto attivo, caricato, si aggiorna con un download sulla
scheda di memoria e non nella memoria di lavoro dell'unità di
comando CMXR. Per aggiornare i dati occorre scaricare e ricaricare
il progetto.
Festo GDCP-CMXR-SY-IT 0909a
25
6. Unità di comando manuale CDSA-D1-VX
6.
Unità di comando manuale CDSA-D1-VX
Tutte le operazioni - anche la programmazione - possono essere eseguite con l'ausilio
dell'unità di comando manuale mobile CDSA. A disposizione si trova anche una
emulazione CDSA con funzionamento simile su un PC.
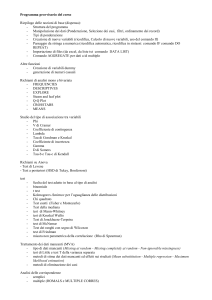
La figura seguente mostra la parte anteriore del dispositivo di comando manuale CDSA:
1 Stop di
emergenza
1
2 Penna
elettronica
2
3 Tasti start e
stop
9
4 Tasti per
esercizio a impulsi
8
5 Tasti per la
selezione delle
funzioni
7
6 Touch screen a
colori
6
3
4
7 Tasti per la
selezione delle
funzioni
5
8 LED per lo
schermo
9 Copertura
interfaccia USB
Fig. 6.1 Dispositivo di comando manuale CDSA
Funzione
Descrizione
Interruttore stop di emergenza Interruttore stop di emergenza a 2 canali secondo categoria 3, da integrare
nel circuito dello stop di emergenza del cliente
Tasti start e stop
Per avviare e arrestare il programma di movimento
Tasti per esercizio a impulsi
Tasti per muovere gli assi nei vari sistemi di coordinate
Tasti per la selezione delle
funzioni
Tasti per selezionare le varie funzioni, ad es. sistemi di coordinate,
indicazioni di posizione, programmazione
LED per il display
Indicazione di stati, ad esempio errore
Touch screen
Display a colori TFT 6,5 pollici con touch screen utilizzabile con le dita o
con la penna elettronica
Penna elettronica
Penna per l'utilizzo del touch screen
Interfaccia USB
Per l'importazione e l'esportazione di programmi FTL e report di stato
Tabella 6.1 Funzioni dispositivo di comando manuale CDSA, parte anteriore
26
Festo GDCP-CMXR-SY-IT 0909a
6. Unità di comando manuale CDSA-D1-VX
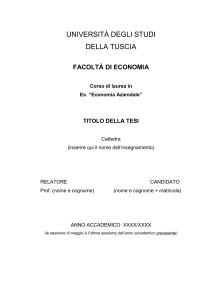
La figura seguente mostra la parte posteriore del dispositivo di comando manuale CDSA:
1
1 Impugnatura
per destrorsi e
sinistrorsi
2 Tasti di
consenso
3 Uscita del cavo
2
2
3
3
Fig. 6.2 Dispositivo di comando manuale CDSA - parte posteriore
Funzione
Definizione
Impugnatura
Il dispositivo di comando manuale dispone di un'impugnatura ergonomica che serve
come appoggio per la mano e che è adatta a destrorsi e a sinistrorsi.
Tasto di
consenso
L'impugnatura ha, sia a destra che a sinistra (per destrorsi o sinistrorsi), un tasto di
consenso a 3 livelli e a 2 canali predisposto per il circuito di sicurezza del cliente.
Uscita del cavo L'uscita del cavo si può fissare a destra o a sinistra quando si monta il cavo.
Tabella 6.2 Funzioni dispositivo di comando manuale, parte posteriore
La struttura ergonomica del dispositivo di comando manuale consente di utilizzarlo anche
appoggiato, ad es. su un tavolo. La disposizione di corpo e impugnatura offre condizioni
sicure.
Festo GDCP-CMXR-SY-IT 0909a
27
6. Unità di comando manuale CDSA-D1-VX
6.1
Installazione
La comunicazione tra il dispositivo di comando manuale e il controller multiassiale CMXR si
effettua con un collegamento Ethernet. L'interfaccia dei due partner della comunicazione
costituisce una scatola di accensione con collegamenti per il dispositivo di comando manuale e il controller multiassiale CMXR.
Panoramica installazione dispositivo di comando manuale:
1 Armadio di comando
7
1
2 Controller multiassiale
CMXR-C1
2
3 Cavo Ethernet
(Crossover)/cavo Ethernet
con switch
4 Scatola di accensione
CAMI-C con …
stop di emergenza a
2 canali
tasto di consenso a
2 canali
vers. 24 V
3
4
5 Connettore a ponte
CAMF-B
6 Cavo NESC-C-D1-x-C1
7 Dispositivo di comando
manuale CDSA
6
5
Fig. 6.3 Installazione - Dispositivo di comando manuale CDSA
L'installazione della scatola di accensione di solito si esegue nell'armadio di comando. La
presa della scatola di accensione viene fissata per evitarne il contorcimento e condotta
all'esterno mediante un'apertura. Un controdado serve per fissare la scatola di accensione
Nota
In caso di collegamento Ethernet si consiglia l'uso di uno switch
intelligente. Solo a questo punto si possono collegare contemporaneamente un PC (con software FCT) e un dispositivo di comando
manuale.
Nota
Per ulteriori informazioni sull'installazione consultare i rispettivi
manuali. Durante l'installazione osservare tutte le norme di
sicurezza necessarie in funzione dell'impiego.
28
Festo GDCP-CMXR-SY-IT 0909a
6. Unità di comando manuale CDSA-D1-VX
6.2
Scatola di accensione CAMI-C
Il dispositivo di comando manuale viene collegato al controller multiassiale CMXR mediante
una scatola di accensione. La scatola di accensione ha i seguenti collegamenti:
Collegamento Ethernet, comunicazione tra CMXR e dispositivo di comando manuale
Striscia di contatti a innesto a 11 poli per
o alimentazione di tensione 24 V CC per dispositivo di comando manuale
o collegamento a 2 canali dell'interruttore dello stop di emergenza
o collegamento a 2 canali dei tasti di consenso
1 Striscia di
contatti a innesto
per alimentazione,
stop di emergenza
e segnali dei tasti
di consenso
2 Connettore
SUB-D a 9 poli, non
in uso
6
5
4
3
3 Filettatura di
attacco per cavo
del dispositivo di
comando manuale
1
2
4 Dado di
fissaggio
5 Parete armadio
di comando
6 Collegamento
Ethernet
Fig. 6.4 Scatola di accensione CAMI-C
La figura mostra la scatola di accensione CAMI-C installata su un lato esterno dell'armadio
di comando. Tenere conto che l'apertura va praticata con uno strumento adeguato.
6.3
Disinnesto del dispositivo di comando manuale
È possibile comandare il controller multiassiale CMXR da un'unità di comando esterna,
ovvero impartire dall'esterno incarichi, quali ad es. start e stop. Un esercizio di questo tipo
non richiede forzatamente il dispositivo di comando manuale. Se le operazioni di messa in
funzione sono concluse, lo si può disinnestare.
Quando si stacca un dispositivo di comando manuale in funzione sulla scatola di accensione, si apre il circuito dello stop di emergenza. A questo punto si presenta una situazione di stop di emergenza che non si può resettare, perché il circuito dello stop di
emergenza è aperto. Per continuare a lavorare, nonostante il dispositivo di comando
Festo GDCP-CMXR-SY-IT 0909a
29
6. Unità di comando manuale CDSA-D1-VX
manuale disinnestato (il comando può arrivare da un'unità esterna), si avvita il connettore
a ponte (indicatore CAMF-B-M25-G4) nella scatola di accensione al posto del dispositivo
di comando manuale.
Il connettore a ponte dispone di due ponti interni del segnale di stop di emergenza a
2 canali. Questi ponti chiudono il circuito e quindi si può resettare la situazione di stop
di emergenza.
Nota
Non è prevista una soluzione che consenta un disinnesto del
dispositivo di comando manuale senza interruzione del circuito di
stop di emergenza. Ciò richiede un esame complessivo dell'installazione e delle norme di sicurezza vigenti. Se la si desidera, questa
soluzione speciale va eseguita dal cliente conformemente alle norme
di sicurezza richieste.
Attenzione
L'interruttore dello stop di emergenze di un dispositivo di comando
manuale disinnestato non è attivo. Il gestore è tenuto a riordinare il
dispositivo di comando manuale disinnestato, in modo da escludere
un azionamento accidentale dell'interruttore di stop di emergenza
inattivo.
1 Connettore a
ponte avvitato
alla scatola di
accensione
3
2
1
2 Cavo metallico
con occhiello per
fissaggio
3 Connettore a
ponte
Fig. 6.5 Connettore a ponte CAMF-B-M25-G4
30
Festo GDCP-CMXR-SY-IT 0909a
6. Unità di comando manuale CDSA-D1-VX
6.4
Panoramica hardware
Per collegare il dispositivo di comando manuale alla scatola di accensione si hanno a disposizione tre cavi confezionati di diversa lunghezza, il connettore a ponte per bypassare i
segnali dello stop di emergenza in stato di disinnesto e un sostegno a parete con supporto
cavi per appoggiare il dispositivo di comando manuale.
Tipo
Significato
CDSA-D1-VX
Dispositivo di comando manuale
NESC-C-D1-5-C1
Cavo di collegamento confezionato, lunghezza 5 m
NESC-C-D1-10-C1
Cavo di collegamento confezionato, lunghezza 10 m
NESC-C-D1-15-C1
Cavo di collegamento confezionato, lunghezza 15 m
CAMI-C
Scatola di accensione
NECC-L1G11-C1
Connettore a 11 poli per scatola di accensione
CAMF-B-M25-G4
Connettore a ponte per scatola di accensione
CAFM-D1-W
Sostegno a parete con appoggio per cavo
Tabella 6.3 Panoramica hardware dispositivo di comando manuale
Cavo di collegamento
confezionato NESC-C-D1-xx-C1
6.5
Sostegno a parete
CAFM-D1-W
Scatola di accensione
CAMI-C
Software
Il dispositivo di comando manuale dispone di un'interfaccia grafica operativa strutturata
in modo facilmente comprensibile e intuitivo. Per apprendere l'uso del dispositivo di
comando manuale, non sono richieste conoscenze specifiche di programmazione o di
informatica. Tutte le informazioni sono disponibili in tedesco e in inglese. La selezione
della lingua si effettua nel software del dispositivo di comando manuale, senza riavviare il
sistema.
Festo GDCP-CMXR-SY-IT 0909a
31
6. Unità di comando manuale CDSA-D1-VX
Estratto dell'interfaccia grafica, indicazione delle posizioni effettive:
Estratto dell'interfaccia grafica, editor di programmazione:
Per ulteriori informazioni consultare la documentazione del software del dispositivo di
comando manuale.
32
Festo GDCP-CMXR-SY-IT 0909a
6. Unità di comando manuale CDSA-D1-VX
6.6
Diritti dell'utente
Per lavorare con il dispositivo di comando manuale, l'utente deve registrarsi con un nome
utente e una password. Ciò impedisce che persone non autorizzate abbiano accesso alle
funzionalità del sistema. L'utente inserito può essere selezionato mediante una maschera
grafica. Dopo la corretta immissione della password si attivano tutti i diritti autorizzati per
l'utente.
Struttura maschera grafica per selezione utente:
Con la gestione utenti si possono inserire nuovi utenti. In tal caso si attribuiscono a ogni
utente una password e un livello di diritti. I diritti dell'utente sono suddivisi in livelli da
1 a 16. Il livello 16 ha tutti i diritti e dovrebbe essere riservato all'administrator.
Struttura maschera grafica per gestione utente:
6.6.1
Livelli utente
Nel controller multiassiale CMXR si può definire per ogni utente un livello da 1 a 15.
Il livello massimo 16 non ha limitazioni e dovrebbe essere riservato all'administrator.
Festo GDCP-CMXR-SY-IT 0909a
33
6. Unità di comando manuale CDSA-D1-VX
Elenco delle funzioni con il livello utente richiesto
Tasto menu
Funzione
Level
Write
Setup
Maschera di impostazione
1
-
Utente
Maschera utente
1
-
Display
Impostazione caratteristiche display
1
-
Sistema
Pop Up menu per impostazioni di sistema
15
-
Blocco
Blocca la funzionalità touch per 30 secondi
1
-
Report
Sezione assistenza
7
sì
Tabella 6.4 Sezione assistenza
Tasto menu
Funzione
Level
Write
Variabili
Maschera di monitoraggio variabili
1
-
Variabile
Pop Up menu per manipolazione
7
sì
Pulizia
Cancella variabili non utilizzate
7
sì
Controlla uso
Controlla uso di variabili
7
sì
Tabella 6.5 Funzione variabili
Tasto menu
Funzione
Level
Write
Progetto
Maschera di progetto
1
-
Carica
Carica progetto/programma
1
sì
Apertura
Apri (trasponi solo) progetto/programma
1
sì
Chiudi/Esci
Chiudi progetto/Esci dal programma
1
sì
Info
Mostra informazioni su programma
1
-
Aggiorna
Aggiorna vista progetto
1
-
File
Funzioni di manipolazione dati
7
sì
Versione
Maschera della versione
1
-
Mostra
Mostra programma selezionato
1
-
Step/Cont
Commutazione Step/Continue
7
sì
Esci
Esci dal programma
7
sì
Tabella 6.6 Funzioni di progetto
Tasto menu
Funzione
Level
Write
Programma
Maschera del programma
1
-
Modifica
Modifica riga di programma selezionata
7
sì
Macro
Ripete Inserisci ultima macro
7
sì
Novità
Inserisce nuova macro
7
sì
PC
Setta puntatore di frase
7
sì
Step/Cont
Commutazione Step/Continue
7
sì
Elaborazione
Funzioni di elaborazione programma
7
sì
Selezione
Seleziona righe per Taglia o Copia
7
sì
Cancella
Cancella righe selezionate
7
sì
Annulla
Annulla ultima operazione
7
sì
34
Festo GDCP-CMXR-SY-IT 0909a
6. Unità di comando manuale CDSA-D1-VX
Tasto menu
Funzione
Level
Write
Sistema di editazione testi
Maschera del sistema di editazione testi
7
sì
Tabella 6.7 Funzioni di programma
Tasto menu
Funzione
Level
Write
Posizioni
Maschera di posizioni del robot
1
-
Attuatori
Mostra posizioni attuatori
1
-
Assi
Mostra posizioni assi robotici
1
-
Mondo
Mostra posizioni in coordinate globali
1
-
Oggetto
Mostra posizioni in coordinate oggetto
1
-
V-Jog
Imposta velocità jog
1
sì
Jog
Imposta sistema di coordinate jog
1
sì
Tabella 6.8 Stati e funzioni dei robot
Tasto menu
Funzione
Level
Write
Messaggi
Maschera per messaggio
1
-
Reset
Resetta messaggio selezionato
1
sì
Tutti
Resetta tutti i messaggi
1
sì
Indicazione
Indicazione dei numeri ID invece dei testi
1
Aiuto
Mostra aiuto per messaggio selezionato
1
-
Mes.
Maschera log messaggio
1
-
Indicazione
Indicazione dei numeri ID invece dei testi
1
Aiuto
Mostra aiuto per messaggio selezionato
1
-
Tabella 6.9 Funzioni di messaggio
6.6.2
Utente impostato alla fornitura
Durante l'installazione del controller multiassiale CMXR vengono creati automaticamente
4 utenti. Essi servono come base per altre impostazioni. Mediante l'utente privilegiato
“Amministratore” è possibile creare nuovi utenti, modificarli oppure cancellarli. Per
ulteriori informazioni consultare la documentazione sul software del dispositivo di
comando manuale.
Nome utente
Password
Level utente
Administrator
admin
16
Service
service
15
Teacher
teacher
7
Operator
operator
1
Tabella 6.10 Utente impostato all'installazione
Festo GDCP-CMXR-SY-IT 0909a
35
6. Unità di comando manuale CDSA-D1-VX
Durante il riavviamento del sistema CMXR oppure dopo un Logout, viene attivato il così
detto Default User che ha il livello 1. Questo utente è creato internamente ed è attivo solo
quando non è attivo nessun utente della lista creata.
Nota
Dopo l'avviamento del sistema il Default User è attivo con
l'impostazione della lingua inglese.
Nota
L'utente “Service” è necessario per il sistema e non può essere
cancellato. Non lo si può utilizzate per lavorare al sistema.
Nota
Per accedere al controller multiassiale CMXR mediante connessione
di rete (Connetti rete) valgono gli stessi utenti. In ogni caso per
questi servizi i diritti dell'utente sono insignificanti. Ogni utente
può creare una connessione di rete utilizzando la propria password.
6.7
Comunicazione con il controller multiassiale CMXR
La comunicazione del dispositivo di comando manuale con il controller multiassiale CMXR
avviene tramite l'interfaccia Ethernet con indirizzo IP impostato in modo definitivo.
Se si deve avviare una comunicazione con un altro controller multiassiale CMXR, bisogna
inserire il dispositivo di comando manuale sulla scatola di accensione del sistema desiderato. Una comunicazione mediante impostazione di un altro indirizzo Ethernet in effetti è
possibile, ma non concepibile, a causa dei segnali hardware dei tasti di consenso che sono
cablati mediante una soluzione hardware.
Nota
Si può sempre solo comunicare con il controller multiassiale CMXR
cui appartiene la scatola di accensione, perché i segnali hardware
dei tasti di consenso devono essere associati secondo una cinematica.
Nota
Per ogni controller multiassiale CMXR è necessaria una scatola di
accensione per comunicare con il dispositivo di comando manuale.
36
Festo GDCP-CMXR-SY-IT 0909a
6. Unità di comando manuale CDSA-D1-VX
6.7.1
Sincronizzazione software di dialogo
Quando si collega il dispositivo di comando manuale alla scatola di accensione, si allaccia
l'alimentazione di tensione e si stabilisce la comunicazione con il controller multiassiale
CMXR. Sulla scheda di memoria dell'unità centrale CMXR-C1 è allocato il software di dialogo
per il dispositivo di comando manuale. Questo software viene caricato e memorizzato nel
suddetto dispositivo per l'esercizio dello stesso.
Ad ogni avviamento a regime del dispositivo di comando manuale si confrontano tra loro le
versioni software sul dispositivo di comando manuale e sulla scheda di memoria dell'unità
centrale CMXR. Se sono diverse, si carica il software nel dispositivo di comando manuale.
Ciò richiede un po' di tempo.
Nota
Il software di dialogo per il dispositivo di comando manuale è archiviato nella scheda di memoria dell'unità centrale CMXR-C1 e nel
dispositivo di comando manuale. Se le versioni sono diverse, si
carica il software dalla scheda di memoria del controller al dispositivo di comando manuale.
6.8
Indirizzi IP alla fornitura
La comunicazione tra dispositivo di comando manuale CDSA e CMXR si svolte mediante
Ethernet. Allo stato di fornitura, il dispositivo CDSA ha le seguenti impostazioni:
Parametri di rete
Valore
Indirizzo IP (CDSA)
192.168.100.101
Subnet Mask
255.255.255.0
Indirizzo gateway
0.0.0.0
Host IP (CMXR)
192.168.100.100
L'indirizzamento dello stato di fornitura è in accordo con lo stato di fornitura del CMXR. Se
questi apparecchi vengono gestiti senza integrazione di rete, non sono necessarie impostazioni in caso di indirizzi IP.
Nota
Se il dispositivo di comando manuale è integrato in una rete, occorre
verificarne il corretto indirizzamento. In questo caso bisogna variare
le impostazioni dello stato di fornitura.
Nota
Il controller multiassiale CMXR non è idoneo al DHCP.
Il controller multiassiale non può ricevere alcun indirizzo IP da un
server DHCP, ma deve essere configurato mediante FCT.
Festo GDCP-CMXR-SY-IT 0909a
37
6. Unità di comando manuale CDSA-D1-VX
6.9
Controllo dello schermo
Se non si svolgono attività sul touch screen, dopo ca. 2 minuti si riduce il'illuminazione
dello sfondo per salvaguardare il display. Dopo ca. 10 minuti si attiva il salvaschermo.
Il touch screen si riattiva per sfioramento.
Nota
Sfiorando il display si disattiva l'illuminazione ridotta dello sfondo
o il salvaschermo. Si attiva l'illuminazione piena.
6.10
Emulazione CDSA
Con il FCT-PlugIn CMXR viene installata una emulazione CDSA sul PC. Questa emulazione
ha le stesse prestazioni funzionali dell'unità operativa CDSA-D1-VX e può essere
comandata immediatamente.
Attenzione
L'emulazione CDSA è puramente una applicazione PC. Non dispone
delle impostazione di sicurezza dell'unità operative CDSA-D1-VX!
Le funzioni di STOP EMERGENZA e i tasti di conferma devono essere
assicurate in altro modo!
38
Festo GDCP-CMXR-SY-IT 0909a
7. Sistemi di azionamento
7.
Sistemi di azionamento
Per gestire le cinematiche si utilizzano esclusivamente controllori motore elettrici Festo,
ricorrendo sia alla tecnica del servomotore che a quella del motore passo-passo, entrambe
Festo. Si supportano i seguenti controllori motore di Festo:
Tipo
Significato
CMMS-ST
Controller per motori passo-passo Festo
CMMS-AS
Controller per servomotori standard Festo
CMMP-AS
Controller per servomotori premium Festo
Tabella 7.1 Controllori motore Festo supportati
La comunicazione con i controllori motore si effettua mediante Festo DriveBus che si base
sul profilo CANopen DS402.
7.1
Impostazione configurazione servo
Per ogni controllore motore si impostano i parametri con il rispettivo plug-in associato
(modulo nel software Festo Configuration Tool FCT). Prima di un esercizio comune con il
controller multiassiale CMXR si raccomanda una messa in funzione di base funzionale di
ogni asse interessato.
Particolarità nella parametrizzazione per controllori motore
Interfaccia di comando:
DriveBus
Metodo di definizione del riferimento: come previsto nel controller multiassiale CMXR
Tabella di traslazione:
solo a titolo di prova locale (non per controller
multiassiale)
Gestione errori:
il gruppo “finecorsa hardware” non può essere
impostato su “Warn” o “Ignore”.
7.2
Indirizzo bus CAN controllori motore
Durante la comunicazione mediante Festo DriveBus su interfaccia CAN X6 il controller
multiassiale CMXR è il master, tutti i driver motore vengono utilizzati con predisposizione
Slave. L'indirizzo bus dei controllori motore è stabilito e viene definito come segue:
a partire da ID CAN 2:
Controller per tutti gli assi fondamentali
poi senza discontinuità: Controller per tutti gli assi mano
poi senza discontinuità: Controller per tutti gli assi ausiliari
Con max. 6 assi ammessi si occupano gli indirizzi CAN 2 ... 7.
Festo GDCP-CMXR-SY-IT 0909a
39
7. Sistemi di azionamento
7.3
Corsa di riferimento
La corsa di riferimento degli assi viene attivata con un programma di movimento FTL e
consente di compilare una sequenza individuale del processo di definizione dei riferimenti.
Gli assi possono eseguire la corsa di riferimento in modo sequenziale o parallelo, a piacere.
Per maggiori ragguagli sulla corsa di riferimento e sulle relative istruzioni FTL consultare il
manuale di programmazione del CMXR.
40
Festo GDCP-CMXR-SY-IT 0909a
8. Modi operativi
8.
Modi operativi
Il controller multiassiale CMXR dispone di 2 modi operativi:
Azionamento manuale a velocità ridotta
Funzionamento automatico
Attenzione
La velocità ridotta nel funzionamento manuale non è una funzione
più sicura. Per i compiti di automazione rilevanti per la sicurezza o
per l'incolumità delle persone occorre adottare misure di sicurezza
esterne supplementari che anche in caso di errore garantiscono
uno stato di esercizio sicuro dell'intero sistema.
La selezione di un modo operativo si effettua da un ingresso digitale (ad es. un interruttore
a chiave) o da un segnale del PROFIBUS. Il modo operativo attivo è indicato da un segnale
digitale.
Secondo quanto prescritto, i segnali dei modi operativi sono generati da una logica mirata
alla sicurezza, perché all'occorrenza, per attivare un modo operativo, questa logica volta
alla sicurezza deve avere uno stato conforme.
8.1
Azionamento manuale
L'azionamento manuale serve a muovere la cinematica, ad es. mediante il dispositivo di
comando manuale. Questo modo operativo serve a predisporre e a mettere in funzione
i programmi. La velocità è limitata (ad es. la velocità di traiettoria del TCP è di max.
250 mm/s). La limitazione della velocità non implica sicurezza. Per i compiti di automazione rilevanti per la sicurezza o per l'incolumità delle persone occorre adottare misure
di sicurezza esterne supplementari.
Funzioni dell'azionamento manuale:
Movimento della cinematica a velocità ridotta. La condizione è data da un tasto di
consenso premuto.
o Con movimenti cartesiani max. 250 mm/sec sul TCP,
o con movimento di singoli assi lineari max. 250 mm/sec,
o con movimento di singoli assi rotativi prestare attenzione al componente
sporgente che all'estremità più lunga non deve superare 250 mm/sec.
La velocità di rotazione degli assi va calcolata in funzione di questa lunghezza e registrata nella configurazione.
Programmazione posizioni con “teach-in"
Creazione e modifica di programmi
Test di programmi in modalità passo-passo o continuata a velocità ridotta. La condizione è data da un tasto di consenso premuto.
Festo GDCP-CMXR-SY-IT 0909a
41
8. Modi operativi
Nota
I valori della velocità ridotta vanno configurati con il Festo Configuration Tool (FCT). A seconda dei parametri vi sono stabiliti i limiti
dei valori max. di velocità.
Per il procedimento manuale con il dispositivo di comando manuale si usano i tasti di
consenso a 2 canali e a 3 livelli del dispositivo stesso che sono collegati al controller
multiassiale CMXR mediante un ingresso digitale.
8.2
Funzionamento automatico
Nel funzionamento automatico, tutti i movimenti della cinematica si svolgono a piena
velocità, ovvero si elaborano e si eseguono tutti i valori dinamici settati nel programma.
Attenzione
Nel funzionamento automatico si possono generare velocità
considerevoli. Nell'esecuzione di questo modo operativo attenersi
alle disposizioni e alle norme di sicurezza vigenti per la gestione
della cinematica.
Nel funzionamento automatico non è possibile spostare gli assi manualmente. I tasti di
consenso del dispositivo di comando manuale non sono presi in considerazione.
8.3
Arresto della cinematica, stop di emergenza
L'arresto della cinematica avviene sulla traiettoria. Ciò significa che tutti gli assi interessati
dall'interpolazione decelerano insieme fino a fermarsi. A tal fine il controller multiassiale
CMXR necessita del segnale di stop di emergenza e del segnale dei tasti di consenso. Se il
controller multiassiale CMXR non arresta gli assi interessati sulla traiettoria in modo
coordinato, si possono verificare delle collisioni, ad es. con lo strumento.
Un arresto coordinato sulla traiettoria può avvenire solo se tutti gli assi necessari a tal fine
sono pronti, ovvero se non presentano errori. Se su un asse c'è un errore, non può essere
arrestato rispettando la traiettoria. In linea di principio esso arresta da solo l'attuatore a
causa dell'errore. In un caso simile subentra una deviazione della traiettoria che non può
essere influenzata dal controller multiassiale CMXR.
Attenzione
Un arresto non coordinato degli assi può causare collisioni, ad es.
con lo strumento, perché viene deviato dalla traiettoria.
42
Festo GDCP-CMXR-SY-IT 0909a
8. Modi operativi
Il controller multiassiale CMXR ha bisogno di tempo per poter arrestare gli assi rispettando
la traiettoria. Questo inizia a decorrere a partire dal segnale dello stop di emergenza,
finché la prestazione degli attuatori non viene disattivata, dopo un tempo determinato
consentito, mediante un modulo improntato alla sicurezza. In questo lasso di tempo,
il controller multiassiale CMXR deve riuscire ad arrestare gli attuatori rispettando la
traiettoria. Se non ci riesce, afferra comunque il modulo e disattiva la prestazione degli
attuatori.
Nota
Il controller multiassiale CMXR frena con i massimi valori di traiettoria possibili grazie alle dinamiche degli assi. Tenere conto di ciò
quando si determina un tempo di frenatura.
La grafica seguente riporta i segnali per la disattivazione degli attuatori e per l'arresto
sulla traiettoria degli assi cinematici:
t
t
Regolatore abilitazione
attuatore
Segnale di stop di
emergenza
Movimento
Tempo sufficiente per
stop su traiettoria
Il tempo è insufficiente per l'arresto sulla
traiettoria, gli assi vengono fermati con il
regolatore dell'attuatore
Nella prima parte della grafica, un arresto sulla traiettoria è possibile. Nella seconda parte,
la prestazione degli attuatori viene disattivata mediante hardware improntato alla sicurezza,
ad es. un relè temporizzatore a 2 canali.
Nota
Quando si imposta il tempo di ritardo per la disattivazione della
prestazione degli attuatori mediante hardware, osservare le disposizioni vigenti.
Festo GDCP-CMXR-SY-IT 0909a
43
8. Modi operativi
8.4
Riposizionamento
Il controller multiassiale CMXR dispone della funzione “Riposizionamento” che implica lo
spostamento automatico di un punto, in cui è stato interrotto un programma, ora ripreso.
Il punto di interruzione viene avviato in automatico.
Una cinematica può abbandonare la traiettoria ad es. per
una caduta di carico degli assi cinematici, ad es. per intervento dei freni
o un procedimento manuale della cinematica.
Dopo un riavvio del programma si porta direttamente la cinematica dalla posizione
effettiva alla posizione di interruzione. Se la cinematica è spostata manualmente, ciò
potrebbe determinare una collisione durante il riposizionamento. Per questo motivo
occorre non sottovalutare il rischio di collisione durante un riposizionamento.
Attenzione, pericolo di collisione
Il riposizionamento viene eseguito per via diretta. Ciò significa che
gli assi vanno dalla posizione attuale direttamente alla posizione di
interruzione.
Per ridurre il rischio di collisione, è consigliabile, prima del riposizionamento, spostare la cinematica a mano in prossimità del punto
di interruzione. Occorrerebbe poi spostare anche alcuni assi di
orientamento nella posizione approssimativa, in cui si trovavano al
momento dell'interruzione.
Il riposizionamento viene effettuato con una velocità definita. Essa si configura con il Festo
Configuration Tool (FCT). Si raccomanda di impostare valori dinamici moderati che risultino
gestibili.
Nota
Nella configurazione dei valori dinamici orientarsi su valori
appropriati che siano gestibili.
44
Festo GDCP-CMXR-SY-IT 0909a
8. Modi operativi
Deviazione dalla traiettoria,
ad es. con procedimento
manuale
Posizione intermedia
Movimento di
riposizionamento diretto
Posizione di interruzione
sulla traiettoria
Nota
Per il riposizionamento si usa un PTP o un'interpolazione lineare
cartesiana in base al tipo di cinematica. Ciò dipende dalla cinematica
utilizzata.
Attenzione, pericolo di collisione
Se un riposizionamento si esegue con un'interpolazione lineare
cartesiana, tenere presenti gli strumenti definiti sulla traiettoria.
Questa situazione può causare movimenti di compensazione
involontari della cinematica.
Festo GDCP-CMXR-SY-IT 0909a
45
9. Metodo di controllo
9.
Metodo di controllo
Il controller multiassiale CMXR si può azionare con 3 metodi di attivazione, il dispositivo di
comando manuale può essere collegato a prescindere dal metodo:
funzionamento senza unità di comando esterna,
controllato da un sistema di comando superiore tramite ingressi e uscite digitali,
controllato da un sistema di comando superiore tramite PROFIBUS DP.
Attenzione
Nell'esecuzione del metodo di controllo attenersi alle disposizioni
vigenti.
La selezione del metodo di controllo avviene con il Festo Configuration Tool (FCT), dove si
settano anche alcuni parametri di questi metodi di controllo.
Nota
Tutti i metodi di controllo elencati del controller multiassiale CMXR
sono esemplificativi e non vantano alcun diritto di completezza e
correttezza. Ad ogni installazione attenersi alle disposizioni vigenti
che non si possono elencare qui.
9.1
Funzionamento senza unità di comando esterna
Una cinematica si può controllare e gestire con un modulo I/O digitale e non necessita di
un'unità di comando esterna. Questa soluzione stand-alone offre un uso diretto della
cinematica, unitamente al dispositivo di comando manuale.
Il dispositivo di comando manuale viene collegato al controller multiassiale CMXR mediante
la scatola di accensione CAMI-C. La scatola di accensione ha i seguenti collegamenti:
alimentazione di tensione 24 V per dispositivo di comando manuale
comunicazione Ethernet tra CMXR e dispositivo di comando manuale
collegamento a 2 canali dell'interruttore dello stop di emergenza
collegamento a 2 canali dei tasti di consenso
La figura seguente riporta un esempio di installazione senza unità di comando esterna:
46
Festo GDCP-CMXR-SY-IT 0909a
9. Metodo di controllo
Segnale di conferma errore attivo
Segnale di conferma modo operativo automatico
Segnale di conferma modo operativo manuale
CMXR
Modo operativo automatico
Esempio di tecnica di sicurezza
Modo operativo manuale
Segnale stop di emergenza
Attuatori
Tasto di consenso
Ethernet
Versione a 2 canali
Tasto di consenso
Segnale stop di emergenza
Dispositivo di
comando manuale
CDSA
Abilitazione attuatore
Altri segnali di stop di
emergenza
Scatola di accensione
CAMI-C
In questo esempio, l'abilitazione dell'attuatore, che potrebbe essere un segnale di stop di
emergenza, si aziona mediante la tecnica di sicurezza. Tale elemento di azionamento offre
la possibilità di impostare un intervallo di tempo per ottenere un disinserimento ritardato
dell'abilitazione dell'attuatore. Con il segnale di conferma del modo operativo attivo o
della presenza di un errore, si può controllare un elemento di segnalazione, ad esempio
una lampadina.
La tabella seguente comprende tutti i componenti richiesti per il metodo di controllo “Senza
unità di comando esterna”. Il numero dei moduli di espansione si può ampliare in base
all'applicazione.
Tipo
Quantità
Significato
CMXR-C1
1
Unità centrale con Ethernet, CAN e scheda di memoria
CECX-D-8E8A-NP-2
1
Modulo misto digitale con 8 ingressi e 8 uscite
NECC-L1G2-C1
2
Connettore maschio a 2 poli
NECC-L1G8-C1
2
Connettore maschio a 8 poli
CDSA-D1-VX
1
Dispositivo di comando manuale
NESC-C-D1-5-C1
1
Cavo per dispositivo di comando manuale, ad es. 5 m
CAMI-C
1
Scatola di accensione per dispositivo di comando manuale
NECC-L1G11-C1
1
Connettore a 11 poli per scatola di accensione
Tabella 9.1 Componenti CMXR, funzionamento con dispositivo di comando manuale
Per garantire il funzionamento con il dispositivo di comando manuale, si richiede almeno
una scheda digitale di ingresso/uscita di tipo CECX-D-8E8A-NP-2. Questa scheda I/O ha
una disposizione fissa dei segnali di sistema per 4 ingressi e 4 uscite che non può essere
modificata. Nella configurazione con il Festo Configuration Tool (FCT), questi segnali
vengono preassegnati automaticamente quando si seleziona il modo operativo “Senza
unità di comando esterna”.
Festo GDCP-CMXR-SY-IT 0909a
47
9. Metodo di controllo
Nota
Il funzionamento senza unità di comando esterna richiede un modulo
I/O centrale supplementare CECX-D-8E8A-NP-2 sul controller multiassiale CMXR.
9.1.1
Segnali di sistema
La tabella seguente comprende i segnali di sistema e la loro occupazione della scheda I/O
CECX-D-8E8A-NP-2 richiesta.
Segnale
Nome del segnale
Significato
Uscita 0
doutError
errore attivo
Uscita 1
riservato
Uscita 2
doutAutoSelected
modo operativo automatico attivo
Uscita 3
doutManSelected
modo operativo manuale attivo
Uscita 4
non occupato
Uscita 5
non occupato
Uscita 6
non occupato
Uscita 7
non occupato
Ingresso 0
dinEmStop
STOP EMERGENZA
Ingresso 1
dinEnabling
tasto di consenso
Ingresso 2
dinAutoSelected
modo operativo automatico
Ingresso 3
dinManSelected
modo operativo manuale
Ingresso 4
non occupato
Ingresso 5
non occupato
Ingresso 6
non occupato
Ingresso 7
non occupato
Tabella 9.2 Occupazione I/O dei segnali di sistema
I punti I/O occupati sulla scheda I/O con “Nome del segnale” sono occupati in modo fisso.
Gli ingressi e le uscite liberi possono essere utilizzati come segnali di applicazione.
L'attribuzione viene eseguita con il Festo Configuration Tool (FCT).
9.2
Unità di comando esterna su interfaccia I/O
digitale
Il controller multiassiale CMXR può essere controllato da 2 moduli I/O CECX-D-8E8A-NP-2;
questo metodo è sufficiente per molte applicazioni. I punti I/O sono occupati da funzionalità fisse.
I moduli I/O utilizzati complessivamente sono 3:
48
Festo GDCP-CMXR-SY-IT 0909a
9. Metodo di controllo
1 modulo per i segnali di sistema (vedi sopra)
2 moduli come interfacce di controllo specifiche.
La figura seguente riporta un esempio di funzionamento del controller multiassiale CMXR
mediante I/O digitali:
Unità di comando esterna
Interfaccia I/O
Esempio di tecnica di sicurezza
CMXR
Modo operativo automatico
Modo operativo manuale
Segnale stop di emergenza
Attuatori
Tasto di consenso
Ethernet
Versione a 2 canali
Tasto di consenso
Segnale stop di emergenza
Dispositivo di
comando manuale
CDSA
Scatola di accensione
CAMI-C
Abilitazione
attuatore
Altri segnali di
stop di emergenza
Un funzionamento contemporaneo del controller multiassiale CMXR mediante dispositivo
di comando manuale e mediante unità di comando esterna non è possibile. Del comando
di livello superiore può disporre sempre solo un partner.
La tabella seguente comprende tutti i componenti necessari all'attivazione mediante unità
di comando esterna con un'interfaccia I/O. Il numero dei moduli di espansione, quali ad es.
schede I/O digitali, può essere ampliato in base all'applicazione.
Tipo
Quantità
Significato
CMXR-C1
1
Unità centrale con Ethernet, CAN e scheda di memoria
CECX-D-8E8A-NP-2
3
Modulo misto digitale con 8 ingressi e 8 uscite
NECC-L1G2-C1
4
Connettore maschio a 2 poli
NECC-L1G8-C1
6
Connettore maschio a 8 poli
CDSA-D1-VX
1
Dispositivo di comando manuale
NESC-C-D1-5-C1
1
Cavo per dispositivo di comando manuale, ad es. 5 m
CAMI-C
1
Scatola di accensione per dispositivo di comando manuale
NECC-L1G11-C1
1
Connettore a 11 poli per scatola di accensione
FBS-SUB-9-WS-CO-K
1
Connettore SUB-D a 9 poli per bus CAN senza resistenza terminale
Tabella 9.3 Componenti CMXR, funzionamento con interfaccia I/O
Festo GDCP-CMXR-SY-IT 0909a
49
9. Metodo di controllo
Nota
Il funzionamento esterno con ingressi e uscite digitali richiede tre
moduli I/O centrali supplementari CECX-D-8E8A-NP-2 sull'unità di
comando CMXR.
Il dispositivo di comando manuale non è strettamente necessario per il funzionamento e si
può disinnestare dopo la messa in funzione. In caso di funzionamento mediante unità di
comando esterna, il dispositivo di comando manuale assume lo stato di osservatore.
Nota
Le altre due schede I/O del tipo CECX-D-8E8A-NP-2 comprendono
i segnali dell'interfaccia per il comando del controller multiassiale
CMXR. Per l'occupazione di questa scheda I/O consultare la documentazione dell'interfaccia.
9.2.1
Funzioni dell'interfaccia I/O
L'interfaccia I/O digitale comprende 16 ingressi digitali e 16 uscite digitali. Per l'esigua
quantità di indirizzi, questa interfaccia è semplice nell'engineering e nell'uso. L'interfaccia
I/O digitale limita la sua funzionalità all'essenziale a causa della limitata quantità di
indirizzi.
Sono possibili le funzioni seguenti:
Start e stop di max. 15 programmi diversi
Caricamento e scaricamento dei programmi
Segnale watchdog per il controllo della comunicazione
Reset errori
Blocco dispositivo di comando manuale
Abilitazione attuatore
Alt programmato
Per una descrizione più dettagliata dell'interfaccia I/O digitale consultare una documentazione
specifica.
9.3
Unità di comando esterna su PROFIBUS DP
La connessione PROFIBUS del controller multiassiale CMXR è una comoda interfaccia con
numerose funzioni da collegare all'unità di comando esterna.
Si supportano due configurazioni da selezionare mediante il software FCT:
Unità di comando su I/O digitale e PROFIBUS DP
Qui si può scegliere se selezionare i modi operativi automatico e manuale dal
PROFIBUS DP o dall'I/O digitale.
Unità di comando solo su PROFIBUS (senza I/O digitale)
Tutti i segnali sono trasmessi tramite PROFIBUS DP.
50
Festo GDCP-CMXR-SY-IT 0909a
9. Metodo di controllo
La figura seguente riporta un esempio di funzionamento del controller multiassiale CMXR
con I/O digitale e PROFIBUS DP. I segnali di sistema “Stop di emergenza” e “Tasto di
consenso” sono trasmessi mediante I/O digitale, i modi operativi tramite PROFIBUS.
Unità di comando esterna
Profibus
Esempio di tecnica di sicurezza
CMXR
Modo operativo automatico
Modo operativo manuale
Segnale stop di emergenza
Attuatori
Tasto di consenso
Ethernet
Versione a 2 canali
Tasto di consenso
Segnale stop di emergenza
Dispositivo di
comando manuale
CDSA
Scatola di
accensione CAMI-C
Abilitazione
attuatore
Altri segnali di
stop di emergenza
La tabella seguente comprende tutti i componenti necessari per il comando mediante
interfaccia PROFIBUS. Il numero dei moduli di espansione, quali ad es. schede I/O digitali,
può essere ampliato in base all'applicazione.
Tipo
Quantità
Significato
CMXR-C1
1
Unità centrale con Ethernet, CAN e scheda di memoria
CECX-D-8E8A-NP-2
1
Modulo misto digitale con 8 ingressi e 8 uscite
CECX-F-PB-S-V0
1
Modulo slave PROFIBUS DPV0
NECC-L1G2-C1
2
Connettore maschio a 2 poli
NECC-L1G8-C1
2
Connettore maschio a 8 poli
CDSA-D1-VX
1
Dispositivo di comando manuale
NESC-C-D1-5-C1
1
Cavo per dispositivo di comando manuale, ad es. 5 m
CAMI-C
1
Scatola di accensione per dispositivo di comando manuale
NECC-L1G11-C1
1
Connettore a 11 poli per scatola di accensione
FBS-SUB-9-WS-PB-K
1
Connettore SUB-D a 9 poli per PROFIBUS senza resistenza terminale
FBS-SUB-9-WS-CO-K
1
Connettore SUB-D a 9 poli per bus CAN senza resistenza terminale
Tabella 9.4 Componenti CMXR, funzionamento con interfaccia PROFIBUS
Festo GDCP-CMXR-SY-IT 0909a
51
9. Metodo di controllo
Nota
Il funzionamento esterno mediante PROFIBUS DP richiede in aggiunta il modulo slave PROFIBUS CECX-F-PB-S-V0 sul controller
multiassiale CMXR.
Nota
Se i segnali di sistema “Stop di emergenza” e “Tasto di consenso”
o i modi operativi sono trasmessi tramite segnali di ingresso digitali,
occorre in aggiunta il modulo I/O CECX-D-8E8A-NP-2.
9.3.1
Segnali di sistema
Se i segnali di sistema “Stop di emergenza” e “Tasto di consenso” o i modi operativi sono
trasmessi tramite segnali digitali, occorre il modulo I/O CECX-D-8E8A-NP-2 che ha una disposizione fissa:
Segnale
Significato
Uscita 0
errore attivo
Uscita 1
riservato
Uscita 2
modo operativo automatico attivo
Uscita 3
modo operativo manuale attivo
Uscita 4
non occupato
Uscita 5
non occupato
Uscita 6
non occupato
Uscita 7
non occupato
Ingresso 0
STOP EMERGENZA
Ingresso 1
tasto di consenso
Ingresso 2
modo operativo automatico
Ingresso 3
modo operativo manuale
Ingresso 4
non occupato
Ingresso 5
non occupato
Ingresso 6
non occupato
Ingresso 7
non occupato
Tabella 9.5 Occupazione I/O dei segnali di sistema con PROFIBUS
I quattro ingressi liberi e le quattro uscite libere sulla scheda I/O si possono usare come
segnali di applicazioni. L'attribuzione viene eseguita con il Festo Configuration Tool (FCT).
52
Festo GDCP-CMXR-SY-IT 0909a
9. Metodo di controllo
9.3.2
Funzioni dell'interfaccia PROFIBUS
L'interfaccia PROFIBUS mette a disposizione 2 prestazioni differenziate dal punto di vista
funzionale:
Profilo controller multiassiale 1 (MCP 1) con 12 byte di dati di comando e di dati utili.
Profilo controller multiassiale 2 (MCP 2) con 40 byte supplementari di dati di comando
e di stato (52 byte complessivi).
Il profilo MCP 1 supporto tutte le funzioni necessarie per comandare e influenzare la cinematica. L'MCP 2 comprende in più le funzioni per il trasferimento delle variabili.
Il profilo si seleziona con il Festo Configuration Tool (FCT).
Per le funzioni dell'interfaccia consultare l'apposito manuale.
9.3.3
Interfaccia nel programma FTL
Il controller multiassiale CMXR dispone di variabili globali per il sistema, utilizzare per la
comunicazione tra il programma FTL e l'unità di comando esterna. Queste variabili possono
essere lette e scritte dall'unità di comando esterna e dal controller multiassiale CMXR.
Con l'ausilio di tali variabili si possono fornire di informazioni il programma FTL e influenzarlo dall'esterno, ad es. uno spostamento di posizione o numeratore.
Il controller multiassiale CMXR comprende le variabili seguenti:
256 variabili di tipo integer 32 bit
256 posizioni cartesiane
256 posizioni assiali
16 sistemi di riferimento
16 valori di ingresso booleani che trasmettono ciclicamente
16 valori di uscita booleani che trasmettono ciclicamente
Tutte le variabili, tranne i 16 ingressi booleani e le 16 uscite booleane, sono elaborate dal
sistema di comando esterno con operazioni di lettura e scrittura. I 16 ingressi booleani e le
16 uscite booleane vengono scritte ciclicamente nella mappatura I/O del PROFIBUS. Ciò
non richiede alcuna azione sul sistema di comando esterno.
La grafica seguente descrive la comunicazione con variabili del programma FTL:
Festo GDCP-CMXR-SY-IT 0909a
53
9. Metodo di controllo
Programma FTL
:
Variabili
plc_Dint[0…255]
Lin(Pos1)
Pos2.x := Pos2.x + plc_Dint[3]
Lin(plc_CartPos[4])
plc_AxisPos[0…255]
IF(plc_Dint[2] = 1 ) THEN
plc_CartPos[0…255]
index := index + 10
Unità di comando
esterna
Profibus
END_IF
plc_RefSys[0…15]
WAIT plc_InBool[7]
Lin(pos7)
plc_OutBool[9] := marker
plc_InBool[0…15]
:
plc_OutBool[0…15]
Nell'utilizzare le variabili nel programma FTL occorre tenere conto che tutti i valori necessari
per l'elaborazione del programma sono settati nel controller multiassiale CMXR. Poiché la
progettazione di traiettoria viene calcolata anticipatamente dal programma FTL, tutti i dati
necessari a tale scopo vengono presupposti.
Nota
Tutte le variabili necessarie devono già essere settate grazie al
calcolo anticipato del programma FTL. In caso contrario si può
verificare un comportamento difettoso del programma.
Nota
Se in corso di esercizio si devono modificare dei dati, occorre tenere
conto che l'elaborazione del programma non ne viene influenzata.
Eventuali soluzioni per evitare ciò (ad es. interblocchi) vanno programmate individualmente nell'applicazione.
9.4
Diritto di scrittura e comando di livello superiore
Il controller multiassiale CMXR può essere comandato dal comando esterno oppure
mediante l'unità di comando manuale. Per evitare problemi, solo uno degli apparecchi ha
il diritto di comandare attivamente il controller multiassiale CMXR, ad es. per avviare programmi. Questo utente attivo possiede il diritto di scrittura e quindi il “comando di livello
superiore”. Un'osservazione passiva è sempre possibile per qualsiasi apparecchio.
La figura seguente mostra gli apparecchi papabili per il comando del controller multiassiale
CMXR.
54
Festo GDCP-CMXR-SY-IT 0909a
9. Metodo di controllo
Unità di comando esterna
PROFIBUS
CMXR
Dispositivo di comando
manuale CDSA
In alternativa all'interfaccia PROFIBUS si può utilizzare anche l'interfaccia I/O digitale.
Nota
Sono un apparecchio può comandare attivamente il controller
multiassiale CMXR.
9.4.1
Funzionamento
Il diritto di scrittura viene gestito dal controller multiassiale CMXR. Dopo l'attivazione del
sistema nessuna delle unità comandanti dispone del diritto di scritture e quindi del
“comando di livello superiore”. La richiesta viene eseguita mediante una finestra di
dialogo sul dispositivo di comando esterno o mediante uno scambio di segnali con l'unità
di comando superiore. In questo frangente non ci sono priorità dei partecipanti, tutti hanno
pari diritti. Ottiene il comando di livello superiore l'apparecchio che inoltra la richiesta per
primo. Se un apparecchio non ha più bisogno del comando di livello superiore, lo può
restituire alla gestione. Non è possibile rimuovere il comando di livello superiore.
Lo stato del comando di livello superiore dell'unità di comando manuale viene visualizzato
con il colore di sfondo nel campo del livello dell'utente attivo:
Colore sfondo = grigio
nessun diritto di scrittura / nessun comando di livello
superiore presente
Colore sfondo = blu
diritto di scrittura / comando di livello superiore presente
Anche sull'interfaccia per il comando esterno vengono trasmessi questi stati.
La seguente figura mostra la figura grafica sull'unità di comando manuale.
Campo livello utente attivo
Festo GDCP-CMXR-SY-IT 0909a
55
9. Metodo di controllo
Nota
Ogni apparecchio azionante deve richiedere da solo il comando
di livello superiore e, all'occorrenza, restituirlo. Non è possibile
rimuovere il comando di livello superiore. Se la comunicazione
con un apparecchio è interrotta, il comando di livello superiore
ritorna alla gestione allo scadere di un timeout interno.
Nota
Se non c'è alcun collegamento con un'unità di comando esterna
e il servizio si gestisce dal dispositivo di comando manuale CDSA,
si deve richiedere il comando di livello superiore del dispositivo
stesso una sola volta, dopo l'avviamento a regime dell'unità di
comando.
9.4.2
Level utente
Condizioni a margine:
Il comando di livello superiore non dipende dal modo operativo e dal level utente delle unità
operative. Anche in caso di level utente 16 (Administrator) si può impartire istruzioni solo
con livello di comando superiore attivo e non è possibile acquisire il comando di livello superiore senza la precedente cessione dello stesso da parte del partecipante che lo detiene.
9.4.3
Influenza del comando di livello superiore
Il comando di livello superiore influisce sulla quantità di azioni possibili di un partecipante.
Ogni partecipante può sempre eseguire azioni passive, ovvero può osservare, ma non influire ad es. sui programmi o sulla cinematica. Le possibilità, inoltre, dipendono dall'interfaccia attiva. La tabella seguente offre una panoramica sulle funzioni attive e passive dei
singoli collegamenti e partecipanti.
Funzione
Dispositivo di comando
manuale CDSA
Collegamento unità di comando esterna
Interfaccia I/O
Interfaccia PROFIBUS
Funzioni attive
Spostamento a impulsi degli assi
X
X
Programmazione posizioni con
“teach-in"
X
X
Start e stop di programmi
X
X
X
Eliminazione dell'errore
X
X
X
X
X
X
X
Funzioni passive
Selezione modo operativo
Segnali tasto di consenso, stop di
emergenza
X
Scambio di dati I/O ciclici
X
Osservazione di variabili
X
X
Scrittura di variabili
X
X
Tabella 9.6 Panoramica su funzioni attive e passive
56
Festo GDCP-CMXR-SY-IT 0909a
9. Metodo di controllo
9.4.4
Esempio di integrazione
In caso di controllo da parte di un'unità di comando esterna si raccomanda di installare su
di essa un selettore per richiedere il comando di livello superiore o per cederlo ad altri
partecipanti (dispositivo di comando manuale). Lo stato del comando di livello superiore
potrebbe essere visualizzato con un segnale luminoso.
Unità di comando esterna
Profibus
CMXR
Dispositivo di comando
manuale CDSA
Selettore per abilitazione dispositivo
di comando manuale
A seconda dello stato del selettore, l'unità di comando esterna assume il comando di livello
superiore o lo restituisce alla gestione. Si può anche pensare di integrare il comando di
livello superiore in una selezione dei modi operativi, ad es.:
funzionamento manuale senza comando di livello superiore,
funzionamento manuale con comando di livello superiore,
funzionamento automatico.
Per eseguire il funzionamento automatico, il comando esterno necessita il comando di
livello superiore, altrimenti ad es. non possono essere avviati i programmi.
Festo GDCP-CMXR-SY-IT 0909a
57
10. Sistemi di coordinate
10.
Sistemi di coordinate
10.1
Sistemi di coordinate assiali
Il sistema di coordinate assiali è un sistema che prende in considerazione tutti gli assi fisici
di una cinematica. Ogni asse ha una coordinata nel sistema in oggetto. L'origine di una
coordinata è nel punto zero dell'asse abbinato.
La posizione del sistema di coordinate assiali è legata alla forma e alla posizione degli assi
meccanici. Ciò è determinato dalla struttura meccanica delle cinematiche.
Esempi:
A3
A2
A3
A1
A1
A2
Nella figura di sinistra è riportato il modello cinematico del tripod Festo. La posizione degli
assi e quindi del sistema di coordinate assiali è determinata dal modello cinematico.
Nel caso della disposizione nella figura di destra si tratta di una cinematica cartesiana.
Anche questa meccanica ha un sistema di coordinate assiali, nonostante gli assi, perpendicolari tra loro, formino un sistema cartesiano. Nel sistema di coordinate assiali, il controller
multiassiale CMXR non tiene conto del modello cinematico, ma solo dei singoli assi che
possono essere lineari o rotativi.
10.2
Sistemi di coordinate cartesiane
Un sistema di coordinate cartesiane è costituito da 3 assi perpendicolari tra loro. Il controller
multiassiale CMXR, condizionato dal modello cinematico interno, calcola l'ambiente cartesiano a partire dalle singole coordinate, trasformandole.
10.2.1 Assi di traslazione X, Y, Z
Nel sistema di coordinate cartesiane, i 3 assi X, Y e Z - perpendicolari tra loro - formano gli
assi di traslazione. Essi vengono definiti secondo la regola della mano destra.
58
Festo GDCP-CMXR-SY-IT 0909a
10. Sistemi di coordinate
Il pollice indica l'asse X positivo, l'indice l'asse Y positivo e il medio l'asse Z positivo.
Questi 3 assi di traslazione consentono di spostare ovvero di descrivere ad es. uno strumento in 3 direzioni spaziali. Si parla di 3 varianze.
10.2.2 Assi di orientamento A, B, C
Con gli assi di traslazione X, Y e Z si può descrivere la posizione ad es. di uno strumento.
Se tuttavia esso ha anche un orientamento, cioè se lo strumento ha effettuato una rotazione
rispetto alla sua posizione originale, non si può esprimere questo movimento con gli assi
X, Y e Z. Per descrivere l'orientamento si ha bisogno di assi di rotazione (= assi di orientamento) nel sistema cartesiano. Essi eseguono una rotazione intorno agli assi di traslazione
X, Y e Z.
Il primo asse rotativo nel sistema cartesiano è definito con “A”, il secondo con “B” e il
terzo con “C”. La sequenza delle rotazioni nel sistema cartesiano è stabilita nel controller
multiassiale CMXR secondo Eulero ZYZ. La descrizione è riportata nel capitolo seguente.
La direzione di rotazione intorno a un asse è definita dalla regola del “pugno destro”: la
mano destra fa un pugno e mette il pollice verso l'alto. Il pollice indica la direzione assiale
positiva, le dita del pugno indicano la direzione positiva della rotazione intorno a questo
asse.
Festo GDCP-CMXR-SY-IT 0909a
59
10. Sistemi di coordinate
10.2.3 Orientamento di Eulero ZYZ
L'orientamento di Eulero descrive una sequenza, in base alla quale si conduce un orientamento nel sistema cartesiano. In questo caso, il controller multiassiale CMXR lavora
secondo il teorema di Eulero ZYZ. Ne risulta la sequenza di rotazioni seguente:
il primo asse rotativo A ruota intorno all'asse Z,
il secondo asse rotativo B ruota intorno all'asse Y del sistema di coordinate ruotate,
il terzo asse rotativo C ruota intorno all'asse Z del sistema di coordinate ruotate.
L'altra rotazione avviene sempre nel sistema di coordinate già ruotate.
Posizione di partenza
1. Rotazione
sull'asse Z
Y
2. Rotazione
sull'asse Y ruotato
Y‘
3. Rotazione
sull'asse Z ruotato
Y‘
X‘
X‘‘
Z‘‘
Z
X
Y‘‘
X‘‘‘
Z‘‘
Z
La figura mostra le 3 sequenze di rotazione secondo il teorema di Eulero ZYZ.
Il teorema di Eulero ZYZ con le 2 rotazioni intorno all'asse Z si dimostra più facilmente
comprensibile rispetto ad altre sequenze di rotazione. Le indicazioni di orientamento si
possono ricostruire in modo praticabile, perché l'asse dello strumento si trova sempre in
direzione dell'asse Z.
Nota
L'orientamento secondo Eulero descrive 3 varianze di orientamento
nello spazio. Esse, tuttavia, si possono raggiungere, solo se la
meccanica della cinematica può soddisfare queste varianze.
Tutte le indicazioni di orientamento nel sistema CMXR sono sempre
indicate secondo il teorema di Eulero ZYZ.
10.3
Sistemi di coordinate della cinematica
10.3.1 Sistema delle coordinate di base
Il cosiddetto sistema delle coordinate di base della cinematica viene determinato dalla
disposizione degli assi nello spazio e dalla loro parametrizzazione. Si tratta di un sistema
di coordinate cartesiane. Esso è definito ad es.
dalla direzione di rotazione degli attuatori e
dal punto zero dell'asse.
Le impostazioni necessarie vengono effettuate nella configurazione del controller multiassiale CMXR e nella configurazione del rispettivo regolatore dell'attuatore. Le impostazioni
60
Festo GDCP-CMXR-SY-IT 0909a
10. Sistemi di coordinate
sono in grado di funzionare, se le direzioni degli assi cartesiano corrispondono sempre
alla regola della mano destra. Se si devia da ciò, la cinematica non è in grado di funzionare
unitamente all'unità di comando CMXR.
Nota
Le impostazioni dei parametri per gli assi e gli attuatori, che influiscono sulle direzioni delle coordinate, devono soddisfare la regola
della mano destra, altrimenti non sono in grado di funzionare.
La posizione e l'orientamento del sistema delle coordinate di base è determinato dalla
cinematica. Per la definizione consultare la descrizione della cinematica corrispondente.
Tutte le impostazioni nella configurazione vanno eseguite in modo che la definizione per le
singole cinematiche sia soddisfatta. La descrizione per le singole cinematiche è
rappresentata al capitolo “11 Cinematiche supportate”.
Nota
Tutte le impostazioni dei parametri, ad es. per assi e attuatori,
devono essere tali da soddisfare le condizioni della cinematica
corrispondente.
La grafica seguente mostra un portale tridimensionale Festo con il suo sistema di coordinate
di base, la cui origine si forma dai punti zero dei singoli assi.
Festo GDCP-CMXR-SY-IT 0909a
61
10. Sistemi di coordinate
X+
Y+
Z+
Sistema delle coordinate di base
Nota
Il sistema delle coordinate di base è cartesiano in sé, come il sistema
di coordinate globali, ed è l'origine cartesiana nella cinematica.
10.3.2 Sistema di coordinate globali
Il sistema di coordinate globali è definito nel “mondo” con 3 varianze. In generale il sistema
di coordinate di base e di coordinate globali corrispondono esattamente.
Spostando il sistema di coordinate di base, il sistema di coordinate mondiali può trovarsi
al di fuori dell'area di lavoro di una cinematica. In questo modo è anche possibile che più
cinematiche si riferiscano allo stesso punto zero.
Nota
Se è necessario uno spostamento della posizione o dell'orientamento del sistema di coordinate di base originario della cinematica,
lo si può definire mediante il Festo Configuration Tool (FCT) con u
offset configurabile.
Esempio:
Due portali tridimensionali sono montati su un sistema di alimentazione comune. Su questo
sistema di alimentazione c'è un punto zero comune, valido per entrambe le cinematiche.
Le cinematiche hanno una distanza di 2000 mm oppure 3500 mm in direzione dell'asse X
del sistema di coordinate globali.
62
Festo GDCP-CMXR-SY-IT 0909a
10. Sistemi di coordinate
2 portali tridimensionali con sistema di coordinate di base
Sistema di coordinate
globali
X+
X+
X+
Y+
Y+
Y+
Z+
Z+
Z+
Sistema di alimentazione
2000 mm
1500 mm
La definizione dello spostamento del sistema di coordinate di base di una cinematica si
effettua partendo dal punto di vista dell'origine del sistema di coordinate globale. In altre
parole, si mette il sistema di coordinate di base nel sistema di coordinate globali, per cui
ora entrambi i sistemi sono perfettamente corrispondenti. Adesso si sposta e/o si orienta
in modo adeguato il sistema di coordinate di base dall'origine del sistema di coordinate
globali nella posizione desiderata.
Per l'esempio con i 2 portati tridimensionali, ciò significa:
Il portale tridimensionale 1 ha uno spostamento di base di X = 2000 mm
Il portale tridimensionale 2 ha uno spostamento di base di X = 3500 mm
Nota
Lo spostamento del sistema di coordinate globali è un'impostazione globale per la cinematica. Nei programmi di movimento si
possono definire altri spostamenti del punto zero, i quali sono attivi
solo per il tempo di elaborazione del programma.
Nota
Se non si sposta il sistema di coordinate di base, il sistema di
coordinate globali è identico ad esso. In tal caso si parla anche di
un sistema di coordinate globali.
Festo GDCP-CMXR-SY-IT 0909a
63
10. Sistemi di coordinate
10.3.3 Sistema di coordinate utensile
Il sistema di coordinate utensile è un sistema cartesiano e comprende 3 traslazioni e
3 indicazioni di orientamento, in totale 6 varianze. Solitamente l'origine del sistema di
coordinate utensile è la flangia dello strumento della cinematica. Tale origine dipende dal
modello di cinematica. Per ulteriori informazioni consultare le descrizioni delle cinematiche.
L'orientamento del sistema di coordinate utensile, innanzitutto, è uguale all'orientamento
del sistema di coordinate di base. Con la definizione di un utensile o l'uso di un asse di
orientamento si può definire il sistema di coordinate utensile nello spazio.
La figura seguente mostra un portale tridimensionale con sistema di coordinate di base e
coordinate utensile:
Y+
Ty+
X+
Z+
Tx+
Sistema delle coordinate
di base
Tz+
Punto operativo utensile
(TCP)
Sistema di coordinate utensile
L'origine del sistema di coordinate utensile costituisce il punto operativo utensile ed è
nominata Tool Center Point (TCP). A questo TCP si può attribuire una definizione
dell'utensile con 6 varianze, grazie alla quale, il TCP ha la possibilità di disporsi nello
spazio su un utensile a piacere. Questo TCP definito viene condotto sulla traiettoria con
movimenti cartesiani.
10.3.4 Operazioni con il sistema di coordinate utensile
Con il sistema di coordinate utensile si lavora esclusivamente in azionamento manuale,
selezionabile ad es. dal dispositivo di comando manuale CDSA. Il sistema di coordinate
utensile è importante solo per la programmazione di posizioni mediante “teach-in” e per la
gestione manuale. Se si programmano delle posizioni mediante “teach-in”, esse vengono
archiviate come posizioni cartesiane o assiali in funzione delle variabili utilizzate.
64
Festo GDCP-CMXR-SY-IT 0909a
10. Sistemi di coordinate
Nota
Se si programmano delle posizioni mediante “teach-in” con sistema
di coordinate utensile selezionato, esse vengono archiviate come
posizioni cartesiane o assiali.
Se si seleziona il sistema di coordinate utensile (ad es. sul dispositivo di comando manuale
CDSA), la cinematica si può muovere nell'ambito di tale sistema con il suo TCP. Inoltre
cambia la denominazione dei tasti jog sul dispositivo di comando manuale.
Se si usa una cinematica limitata, ovvero se non si coprono tutte le 6 varianze, per gli assi
di orientamento si visualizza la sigla asse A4 (sigla esemplificativa), anziché la denominazione di orientamento A, B, C.
La figura seguente mostra un'assegnazione tasti del dispositivo di comando manuale dopo
la selezione del sistema di coordinate utensile con una cinematica limitata.
Assi X, Y e Z dell'utensile
Asse di orientamento
Festo GDCP-CMXR-SY-IT 0909a
65
11. Cinematiche supportate
11.
Cinematiche supportate
Il controller multiassiale CMXR ha dei modelli cinematici interni. Tali modelli descrivono
il tipo di cinematica e i suoi assi per disposizione, posizione e forma. Qui di seguito si descrivono tutti i modelli cinematici supportati dal sistema CMXR. I numero max. di assi di
una cinematica è limitato a 6.
11.1
Struttura di cinematiche
Le cinematiche sono costituite essenzialmente da assi fondamentali e assi di orientamento
(assi mano). Qui di seguito se ne descrivono il significato e la funzione. A questi assi cinematici si possono aggiungere inoltre assi ausiliari che insieme interpolano sulla posizione
di arrivo della cinematica.
11.1.1 Assi fondamentali
Gli assi A1, A2 e A3 costituiscono nel caso standard 3 assi che, nel sistema cartesiano,
coprono fino a 3 assi di traslazione X, Y e Z. Questi assi possono avviare delle posizioni
nello spazio cartesiano. Se sugli assi fondamentali è fissato uno strumento, il suo orientamento è accoppiato alla posizione degli assi fondamentali e non può essere influenzato.
A3
A2
A1
A2
A1
A3
Le figure mostrano le cinematiche tripod e portale tridimensionale Festo. Gli assi A1, A2 e
A3 costituiscono gli assi fondamentali delle cinematiche.
Nota
Tutti gli assi fondamentali sono assi elettrici comandati dal controller
multiassiale CMXR. Non si possono usare assi pneumatici come
assi fondamentali.
66
Festo GDCP-CMXR-SY-IT 0909a
11. Cinematiche supportate
11.1.2 Assi di orientamento, assi mano
Gli assi di orientamento, detti anche assi mano, sono montati a un'estremità degli assi
fondamentali. Essi sono di tipo rotativo. Al massimo è ammesso un asse di orientamento
che costituisce un'altra varianza oltre alle 3 degli assi fondamentali. Insieme agli assi
fondamentali risulta un numero massimo di 4 varianze di una cinematica.
All'estremità degli assi di orientamento si trova la flangia, su cui è montato l'utensile.
Con l'ausilio degli assi di orientamento si può quindi orientare lo strumento nello spazio,
analogamente alla mano di una persona. Il termine asse mano deriva da qui.
Asse Z
+
Esempio: Attuatore rotativo elettrico con una varianza
Nota
Se si desidera una variazione di orientamento sulla traiettoria,
occorre condurre elettricamente gli assi di orientamento, affinché
possano interpolare sulla traiettoria.
Gli assi rotativi e oscillanti pneumatici si possono impiegare anche
come assi di orientamento, ma con orientamento statico da settare
mediante i dati dello strumento.
11.1.3 Inseguimento degli assi di orientamento
La rotazione dell'asse di orientamento porta con sé l'orientamento dello strumento. Ciò
significa che l'orientamento del sistema di coordinate utensile, la cui origine è sul TCP,
varia analogamente all'orientamento dell'asse di orientamento.
Nell'esempio seguente l'asse di orientamento è ruotato di +45. Il sistema di coordinate
utensile (Tx e Ty) viene trascinato in un movimento analogo. Il sistema di coordinate
globali non ne è influenzato.
Festo GDCP-CMXR-SY-IT 0909a
67
11. Cinematiche supportate
Sistema di coordinate
globali
Asse di orientamento
= 0 gradi
Asse di orientamento
= 45 gradi
X+
Tx+
Tx+
Y+
Ty+
Ty+
Se mediante programmazione in FTL (Festo Teach Language) si attiva un sistema di riferimento, esso agisce in modo supplementare sul sistema di coordinate globali. Se nel sistema di riferimento si genera una rotazione che corrisponde alla perfezione alla varianza
della cinematica (ad es. rotazione intorno all'asse Z), l'asse di orientamento viene automaticamente inseguito. Nell'esempio seguente si sposta e si ruota il contorno destro di un
sistema di riferimento. Poiché la rotazione si può eseguire con l'asse di orientamento,
quest'ultimo viene inseguito. Si conduce quindi verso il contorno anche lo strumento,
come senza rotazione.
Contorno con spostamento e
rotazione mediante sistema di
riferimento
Contorno senza spostamento
X+
X+
Tx+
Y+
Y+
Tx+
Ty+
Ty+
X+
Y+
Nota
Se si orienta nello spazio un contorno mediante un sistema di riferimento, lo strumento viene condotto automaticamente sul contorno
con l'ausilio di un asse di orientamento, a condizione che le varianze necessarie siano “coperte” dall'asse di orientamento.
11.1.4 Interpolazione degli assi di orientamento
Tutti gli assi fondamentali e gli assi mano fanno parte della cinematica. I movimenti di
questi assi cinematici sono calcolati dal modello cinematico interno, dalla trasformazione
68
Festo GDCP-CMXR-SY-IT 0909a
11. Cinematiche supportate
delle coordinate. Nei movimenti cartesiani si tiene conto della posizione cartesiana e
dell'orientamento indicato. Durante gli spostamenti cartesizni vengono considerate le
posizioni cartesiane e l'orientamento indicato.
Non è da escludere che più assi si muovano con una sola istruzione di posizione. Ciò
dipende dall'istruzione e dal tipo di cinematica.
Nell'esempio seguente si applica uno strumento a gomito all'asse di orientamento.
Questo strumento è condotto sulla traiettoria e l'orientamento è ruotato di 180 gradi.
+
+
Asse di orientamento
Y+
X+
A+
Z+
La figura seguente mostra una pianta del movimento. La punta dello strumento è condotta
sulla traiettoria, trascinando con sé l'orientamento (rotazione di 180 gradi). Gli assi cartesiani X, Y e Z eseguono un cosiddetto movimento di compensazione, sovrapposto al movimento di traiettoria. Esso è necessario per adattare alla traiettoria posizione, orientamento
e strumento.
Traiettoria della flangia dello
strumento
Traiettoria dello
strumento
Y+
X+
Nota
Si parla di movimento di compensazione anche nel caso di movimenti degli assi che fanno seguito a una variazione dell'orientamento.
Festo GDCP-CMXR-SY-IT 0909a
69
11. Cinematiche supportate
Nota
Poiché gli assi di orientamento, ad es. per effetto dei sistemi di riferimento, ruotano automaticamente a causa dell'inseguimento, è
necessario controllare che le linee (cavi, tubi flessibili) non subiscano
danni.
Nell'interpolazione dell'asse di orientamento occorre controllare che esso si comporti
diversamente nell'ambito di un movimento con indicazione di una posizione cartesiana o
assiale. Se si utilizza una posizione cartesiana, si raggiunge la posizione di arrivo per la via
più breve, per ridurre i movimenti. Se si indica una posizione in coordinate assiali, l'asse di
orientamento percorre sempre il tragitto programmato.
Attenzione, pericolo di collisione
Con l'integrazione degli assi di orientamento nel movimento bisogna
assicurarsi, con una messa in funzione, che una rotazione dell'asse
di orientamento vada nella direzione desiderata. Si raccomanda di
programmare i movimenti di orientamento mediante “teach-in” e di
testarli con il dispositivo di comando manuale.
70
Festo GDCP-CMXR-SY-IT 0909a
11. Cinematiche supportate
Nell'esempio seguente l'asse di orientamento si trova sulla posizione 40 gradi. Se ora si
programma un movimento con una posizione cartesiana (del tipo CARTPOS), in cui l'asse
di orientamento deve ruotare di 320 gradi, esso percorre il tragitto più breve, ovvero, in
questo esempio, percorre a tutti gli effetti 80 gradi.
Traiettoria dell'asse di orientamento con
indicazione di una posizione cartesiana
320°
Y+
40°
0°
X+
Traiettoria dello strumento
90°
270°
180°
Se ora, invece della posizione cartesiana, si indica nel movimento una posizione assiale
(del tipo AXISPOS), l'asse di orientamento ruota dalla posizione 40 gradi alla posizione
320 gradi, tenendo conto del segno matematico. In questo esempio, l'asse di orientamento
percorre a tutti gli effetti 280 gradi.
Y+
320°
40°
Traiettoria dello strumento
0°
X+
90°
270°
180°
Traiettoria dell'asse di orientamento con
indicazione di una posizione assiale
Festo GDCP-CMXR-SY-IT 0909a
71
11. Cinematiche supportate
11.1.5 Assi mano elettrici e pneumatici
Un asse oscillante pneumatico non viene considerato come polso poiché non può essere
traslato in modo interpolato. Deve quindi essere considerato nell'ambito della definizione
dello strumento.
Attenzione
Quando si utilizzano assi pneumatici occorre sempre pensare alle
definizioni corrette dello strumento. Definizioni errate o non
considerate possono provocare collisioni e danni alle cose.
La figura seguente mostra l'utilizzo di un asse oscillante pneumatico dietro a un asse
mano elettrico. È rappresentata una sezione della cinematica del tripod con un asse di
orientamento elettrico, su cui è montato un asse oscillante pneumatico DRQD con una
ventosa.
Asse di orientamento elettrico
Attuatore di rotazione
pneumatico DRQD
11.1.6 Assi ausiliari
Contrariamente agli assi fondamentali e agli assi mano, gli assi ausiliari non rientrano nel
modello cinematico e non vengono presi in considerazione dal modello cinematico della
trasformazione delle coordinate. Gli assi ausiliari sono interpolati dal controller multiassiale
CMXR per il movimento cartesiano degli assi fondamentali e degli assi mano sotto forma di
movimento point-to-point.
72
Festo GDCP-CMXR-SY-IT 0909a
11. Cinematiche supportate
Nota
Gli assi ausiliari sono sempre interpolati insieme al movimento
cartesiano. Non è possibile un movimento separato e asincrono
degli assi ausiliari per il movimento cartesiano della cinematica.
Nell'esempio seguente si rappresenta l'utilizzo di un asse ausiliario elettrico su una cinematica tripod. L'asse ausiliario si usa come asse rotativo sulla flangia dello strumento,
perché questa costellazione nel modello cinematico tripod non è prevista.
Pezzo
Nella grafica è rappresentata una variazione di posizione dell'asse ausiliario rotativo. Poiché
esso non esegue alcun movimento cartesiano, gli altri assi non attuano alcun movimento
di compensazione. In caso di impiego di assi ausiliari occorre sempre controllare i movimenti per evitare una collisione.
Attenzione
Se si utilizzano assi ausiliari, sussiste rischio di collisione durante i
movimenti, perché lo strumento (TCP) potrebbe non seguire la
traiettoria degli assi cinematici. Una messa in funzione del movimento è assolutamente necessaria.
11.1.7 Programmazione di assi mano e assi ausiliari
Gli assi mano e gli assi ausiliari vengono mossi in base all'interpolazione interna mediante
un movimento PTP. Questo tipo di interpolazione richiede un'indicazione della dinamica
come con i movimenti PTP. Ciò significa che una dinamica cartesiana programmata della
traiettoria non sortisce alcun effetto sulla dinamica degli assi mano e degli assi ausiliari.
Per influenzare la dinamica degli assi mano e degli assi manuali, sono necessarie le indicazioni percentuali della dinamica, come in un PTP in aggiunta alla dinamica cartesiana.
Festo GDCP-CMXR-SY-IT 0909a
73
11. Cinematiche supportate
Nota
Nell'ambito di un movimento cartesiano, per gli assi mano e per gli
assi ausiliari si richiedono in aggiunta le indicazioni della dinamica
per movimenti PTP. Esse devono essere espresse in percentuale
con le relative macro.
Per ulteriori informazioni consultare il manuale di programmazione.
11.1.8 Denominazione della sequenza degli assi nelle
cinematiche
Nelle cinematiche, gli assi fondamentali e gli assi mano descrivono una sequenza di assi.
Per rappresentare in modo semplice questa sequenza, si ricorre anche a lettere dell'alfabeto
come descrizione di questa catena di assi. Sulla scorta di tale denominazione si indica
anche il tipo di asse, ovvero se si tratta di un asse lineare o rotativo.
L
significa asse lineare
R
significa asse rotativo
La denominazione si struttura come segue:
<sequenza caratteri per assi fondamentali> - <sequenza caratteri per assi mano>
Esempi:
LL-R
cinematica con 2 assi fondamentali lineari e 1 asse mano rotativo
LLL-RR cinematica con 3 assi fondamentali lineari e 2 assi mano rotativi
11.2
Portale lineare cartesiano
Con portale lineare si intende una cinematica cartesiana con 2 assi fondamentali che sono
perpendicolari tra loro e quindi formano un sistema cartesiano. Questi assi sono posti in
sequenza X-Z o Y-Z in modo cartesiano. L'asse perpendicolare forma sempre l'asse cartesiano Z. In via opzionale si può applicare un asse di orientamento sulla flangia per lo strumento.
74
Festo GDCP-CMXR-SY-IT 0909a
11. Cinematiche supportate
-
Asse 1
+
Asse 2
+
X+ o Y+
A+
+
Z+
Asse 3
Tx+ o Ty+
Tz+
Cinematica
Numero assi
fondamentali
Numero assi
mano
Sequenza assi
Portale lineare senza
asse rotativo
2
0
LL
Portale lineare con
asse rotativo
2
1
LL-R
Tabella 11.1 Costellazione portale lineare
La disposizione degli assi cartesiani come peculiarità X-Z o Y-Z è
impostata dal Festo Configuration Tool (FCT).
Nota
Il punto zero del sistema di coordinate globali è definito dal punto
zero degli assi 1 e 2. La posizione di riposo e la direzione di rotazione
dell'asse 3 sono parametrizzate in modo che il sistema di coordinate
utensile (Tx o Ty, Tz) sia perfettamente corrispondente al sistema di
coordinate di base della cinematica.
Questa cinematica ridotta ammette solo assi di orientamento limitati e interpolanti, perché
manca la terza varianza degli assi fondamentali per muovere nello spazio lo strumento in
movimenti di compensazione. I movimenti cartesiano si possono quindi eseguire solo in
direzione degli assi fondamentali presenti 1 e 2.
Festo GDCP-CMXR-SY-IT 0909a
75
11. Cinematiche supportate
Esempio
La cinematica ha un asse di orientamento (asse 3), su cui è montato uno strumento, il cui
TCP è definito nello spazio (non verticale). Una rotazione cartesiana dell'asse 3 gira intorno
al TCP, cosa impossibile a causa della varianza mancante degli assi fondamentali. Simili
movimenti rotativi devono eseguirsi con un'interpolazione PTP, in cui il TCP non ha importanza.
Nota
Un portale lineare ammette solo assi mano a interpolazione
limitata a causa della varianza mancante.
Nota
Non sono consentiti comandi di traslazione in una varianza non
disponibile; essi generano un errore.
Il riposizionamento di un portale lineare è eseguito con un movimento PTP.
Attenzione
Il riposizionamento è eseguito con un'interpolazione PTP. Verificare
che durante il riposizionamento, non si trovino sul tragitto ostacoli
al movimento.
La figura seguente mostra un portale lineare Festo:
11.3
Portale cartesiano a sbalzo
Un portale a sbalzo è costituito da una cinematica cartesiana, formata da 2 assi fondamentali posti perpendicolarmente uno all'altro. Ci sono quindi 2 varianze di traslazione. Questi
assi sono istruiti come X e Y e “coprono” il piano X-Y. Non è disponibile un asse Z elettrico
per un'interpolazione congiunta. I movimenti in direzione Z si possono realizzare ad es.
76
Festo GDCP-CMXR-SY-IT 0909a
11. Cinematiche supportate
con un attuatore pneumatico. In via opzionale si può applicare a questa cinematica un
asse di orientamento sulla flangia per lo strumento.
+
Asse 2
-
Asse 1
+
Asse 3
+
Ty+
Y+
X+
Tx+
A+
Cinematica
Numero assi
fondamentali
Numero assi
mano
Sequenza assi
Portale a sbalzo senza
asse rotativo
2
0
LL
Portale a sbalzo con
asse rotativo
2
1
LL-R
Tabella 11.2 Costellazioni portale a sbalzo
Nota
Il punto zero del sistema di coordinate globali è definito dal punto
zero degli assi 1 e 2. La posizione di riposo e la direzione di rotazione
dell'asse 3 sono parametrizzate in modo che il sistema di coordinate
utensile (Tx o Ty, Tz) sia perfettamente corrispondente al sistema di
coordinate di base della cinematica.
Nota
Un portale a sbalzo ammette solo assi mano a interpolazione
limitata a causa della varianza mancante.
Nota
Non sono consentiti comandi di traslazione in una varianza non
disponibile; essi generano un errore.
Il riposizionamento di un portale a sbalzo è eseguito con un movimento PTP.
Festo GDCP-CMXR-SY-IT 0909a
77
11. Cinematiche supportate
Attenzione
Il riposizionamento è eseguito con un'interpolazione PTP. Verificare
che durante il riposizionamento, non si trovino sul tragitto ostacoli
al movimento.
La figura seguente mostra un portale a sbalzo Festo con un asse Z pneumatico:
11.4
Portale tridimensionale cartesiano
Un portale tridimensionale è una cinematica cartesiana che si può muovere nello spazio
con 3 assi fondamentali. Essa dispone degli assi fondamentali X, Y e Z, perpendicolari tra
loro. In via opzionale si può applicare a questa cinematica un asse di orientamento sulla
flangia per lo strumento.
+
Asse 2
-
Asse 3
+
Asse 4
Y+
+
A+
X+
Z+
78
Asse 1
-
+
Ty+
Tx+
Tz+
Festo GDCP-CMXR-SY-IT 0909a
11. Cinematiche supportate
Nota
Il punto zero del sistema di coordinate globali è definito dal punto
zero degli assi 1, 2 e 3. La posizione di riposo e la direzione di rotazione dell'asse 4 sono parametrizzate in modo che il sistema di
coordinate utensile (Tx o Ty, Tz) sia perfettamente corrispondente
al sistema di coordinate di base della cinematica.
Cinematica
Numero assi
fondamentali
Numero assi
mano
Sequenza assi
Portale tridimensionale senza asse rotativo
3
0
LLL
Portale tridimensionale con asse rotativo
3
1
LLL-R
Tabella 11.3 Costellazioni portale tridimensionale
Il riposizionamento di un portale tridimensionale è eseguito con un movimento PTP.
Attenzione
Il riposizionamento è eseguito con un'interpolazione PTP. Verificare
che durante il riposizionamento, non si trovino sul tragitto ostacoli
al movimento.
La figura seguente mostra un portale tridimensionale Festo:
Festo GDCP-CMXR-SY-IT 0909a
79
11. Cinematiche supportate
11.5
Cinematica tripod
La cinematica tripod è una cinematica ad asta parallela. Contrariamente alla cinematica
cartesiana, la disposizione degli assi non è perpendicolare e non forma uno spazio cartesiano. Questa cinematica dispone di 3 varianze. In via opzionale si può montare un asse
di orientamento (asse 4) sulla flangia per lo strumento.
Asse 3
Asse 1
-
-
+
+
Asse 2
-
+
Y+
+
X+
A+
Z+
Asse 4
Ty+
Tx+
Tz+
Nota
Il punto zero del sistema di coordinate globali è definito dal punto
zero degli assi 1, 2 e 3. La posizione di riposo e la direzione di rotazione dell'asse 4 sono parametrizzate in modo che il sistema di
coordinate utensile (Tx o Ty, Tz) sia perfettamente corrispondente
al sistema di coordinate di base della cinematica.
Cinematica
Numero assi
fondamentali
Numero assi
mano
Sequenza assi
Tripd senza asse rotativo
3
0
LLL
Tripod con asse rotativo
3
1
LLL-R
Tabella 11.4 Costellazioni cinematica tripod
La posizione del sistema di coordinate cartesiane è definito dall'asse 1 del tripod. Se si
proietta l'asse 1 sul piano orizzontale, il vettore assiale descrive la direzione dell'asse
cartesiano X. La direzione positiva dell'asse cartesiano X è determinata dalla direzione
negativa dell'asse 1.
80
Festo GDCP-CMXR-SY-IT 0909a
11. Cinematiche supportate
Asse 3
Y+
X+
+
-
+
+
Asse 1
Asse 2
-
Nota
Il riallineamento del sistema di coordinate globali è definito dalla
posizione dell'asse 1. Se si proietta l'asse 1 sul piano orizzontale,
esso indica la direzione dell'asse cartesiano X.
Nota
Se, durante il montaggio del tripod, si desidera riallineare gli assi
cartesiani a un altro sistema di riferimento, ad es. un'unità di avanzamento pezzi, lo si deve fare riallineando il tripod con l'asse 1. Un
riallineamento preciso si esegue con uno slittamento del sistema di
coordinate globali. Esso si definisce con il Festo Configuration Tool
(FCT).
Nel caso del tripod, il riposizionamento si esegue con un'interpolazione lineare cartesiana,
essendo limitato dalla struttura cinematica.
Attenzione
Il riposizionamento è eseguito con un'interpolazione lineare cartesiana. Verificare che durante il riposizionamento, non si trovino sul
tragitto ostacoli al movimento. Se un tool è definito, lo si sposta
sulla traiettoria verso il punto di interruzione.
11.5.1 Origine del sistema di coordinate globali
Il sistema di coordinate globali, con le sue direzioni assiali sulla posizione zero degli assi di
orientamento, corrisponde perfettamente al sistema di coordinate di base del tripod. Il
punto zero del sistema di coordinate utensile è posto al centro del piano della piastra
flangiata.
Festo GDCP-CMXR-SY-IT 0909a
81
11. Cinematiche supportate
Aste
Origine del sistema di
coordinate globali
Piastra flangiata
Spostamento in Z+
verso flangia
Vettore TCP
Vettore TCP Z
Ty+
Tx+
Tz+
Vettore TCP X
L'origine del vettore TCP è nel punto zero originario del sistema di coordinate utensile
sulla flangia dello strumento. Il vettore TCP sposta il sistema di coordinate utensile conformemente alla sua definizione. Nella definizione di un vettore TCP per uno strumento
montato sulla piastra flangiata occorre tenere presente che il vettore va indicato a partire
dall'origine del sistema di coordinate utensile sulla flangia dello strumento. Occorre
prendere in considerazione lo spostamento sulla piastra flangiata e altre strutture.
Nota
Nella definizione del vettore TCP considerare l'entità dello
spostamento sulla piastra flangiata.
La figura seguente riporta la cinematica tripod Festo:
82
Festo GDCP-CMXR-SY-IT 0909a
11. Cinematiche supportate
11.6
Interpolazione assiale
Le cinematiche, per le quali non esiste un modello cinematico interno, si possono controllare
con un'interpolazione assiale pura. Ciò significa che tutti i movimenti possono essere
eseguiti solo come point-to-point (PTP). Non sono ammesse traiettorie cartesiane, quali
interpolazioni lineari e circolari. Inoltre non ci sono assi mano e assi ausiliari e neppure
strumenti definibili (TCP).
+
Asse 4
Asse 3
+
Asse 2
-
+
+
Asse 1
La grafica mostra un esempio con una cinematica libera con 2 assi lineari e 2 assi rotativi.
Per questa cinematica non esiste un modello interno, perché la disposizione degli assi è
libera e quindi la sequenza assiale è indefinita. Per tale motivo mancano anche un sistema
di coordinate globali e di coordinate utensile, mentre c'è un sistema di coordinate assiali.
La sequenza degli assi lineari e rotativi possibili è a piacere ed è determinata dalla configurazione nel Festo Configuration Tool (FCT).
Nota
Il punto zero del sistema di coordinate assiali è definito dal punto
zero di tutti gli assi.
Nota
Con una cinematica libera / interpolazione assiale non è nota la
costellazione meccanica degli assi. I movimenti si possono eseguire
solo in un'interpolazione point-to-point (PTP). Tutte le funzionalità
che lavorano in modo cartesiano non sono ammesse e generano un
errore.
La figura seguente riporta esempi di assi lineari e rotativi Festo:
Esempi di assi lineari
Festo GDCP-CMXR-SY-IT 0909a
Esempi di assi rotativi
83
11. Cinematiche supportate
11.7
Panoramica di tutte le cinematiche supportate
La tabella seguente riporta una panoramica di tutti i modelli cinematici supportati dal
CMXR-C1.
Nome cinematica
Numero assi Numero assi
fondamentali mano
Assi ausiliari
Portale lineare cartesiano
2
max. 1
max. 3
Portale cartesiano a sbalzo
2
max. 1
max. 3
Portale tridimensionale
cartesiano
3
max. 1
max. 3
Tripod
3
max. 1
max. 3
Cinematica libera
6
nessuna
nessuna
Tabella 11.5 Panoramica cinematiche supportate
Il modello cinematico desiderato si seleziona in fase di configurazione mediante il Festo
Configuration Tool (FCT).
Nota
Gli assi mano della tabella sono assi elettrici che interpolano con
una cinematica. Qui non si possono utilizzare attuatori rotativi e
oscillanti pneumatici. Essi devono essere integrati separatamente
mediante la definizione di dati strumento.
Nota
Numero max. di assi = assi fondamentali + assi mano +
assi ausiliari = 6.
84
Festo GDCP-CMXR-SY-IT 0909a
INDICE ANALITICO:
A
Administrator....................................... 33
Azionamento manuale ......................... 41
C
Cartella application.............................. 17
CDSA ................................................... 26
Cinematica tripod ................................ 80
CMXR ................................................... 13
Connettore........................................... 21
Connettore a ponte .............................. 30
Connettori del pannello frontale .......... 20
Controller multiassiale CMXR-C1 ........... 8
D
Diritti dell'utente ................................. 33
Dispositivo di comando manuale......... 26
Dispositivo di comando manuale
CDSA-D1-VX ....................................... 8
F
Funzionamenti ..................................... 46
Funzionamento automatico ................. 41
G
Gruppo centrale ................................... 13
I
Impianto dei file................................... 16
M
Memoria dati ....................................... 15
Modi operativi ..................................... 41
N
Nome utente ........................................ 33
P
Password ............................................. 33
Portale ad area .................................... 78
S
Scatola di accensione .......................... 28
Scheda di memoria .............................. 15
Sistema di coordinate assiali ............... 58
Stop di emergenza ............................... 42
Struttura a cartelle ............................... 16
V
Velocità ridotta .................................... 41
Festo GDCP-CMXR-SY-IT 0909a
85