Sergio Benenti
Una piccola introduzione serale
alla
GEOMETRIA ANALITICA
Anno Accademico 2007-2008
Dipartimento di Matematica
Università di Torino
S. Benenti - Geometria Analitica - La retta
(4.2.2012) - 1
La retta
Il piano euclideo, riferito ad un sistema di coordinate cartesiane (x, y) aventi origine in
un punto O, è utilizzato per la rappresentazione grafica delle funzioni reali a variabili reali
y = f (x). Esso può più in generale essere utilizzato per la rappresentazione di figure piane
attraverso equazioni nelle due variabili (x, y). Un primo esempio fondamentale è l’equazione
della retta. Una retta del piano è rappresentata da un’equazione di primo grado
(1)
ax+ by +c = 0
dove (a, b, c) sono numeri reali. Ciò significa che tutti i punti del piano le cui coordinate
(x, y) soddisfano ad un’equazione di questo tipo costituiscono una retta.
Nel caso b 6= 0, l’equazione può risolversi rispetto a y dividendo per b. Si ottiene
un’equazione del tipo
(2)
y = mx+ q
posto
(3)
a
m= − ,
b
c
q= − .
b
Il numero m prende il nome di coefficiente angolare della retta. Se si sceglie x = 0 si
trova y = q: ciò significa che la retta di equazione (2) passa per il punto (0, q) sull’asse y
(il numero q prende per questo il nome di intercetta della retta).
Nel caso b = 0 l’equazione (1) diventa semplicemente
ax + c = 0
e quindi
c
x= − .
a
Quest’equazione rappresenta una retta parallela all’asse y, perché tutti i suoi punti hanno
coordinata x costante (pari a −c/a) e coordinata y qualunque.
Problema 1. Retta passante per un punto e perpendicolare ad un vettore.
Fissato un punto P0 = (x0 , y0 ) ed un vettore v = a i + b j = (a, b) (cioè un vettore di
componenti (a, b)), pensato applicato in P0 , allora tutti i punti P = (x, y) tali che il vettore
P0 P è perpendicolare al vettore v costituiscono una retta. L’equazione di questa retta
si ottiene imponendo la condizione di ortogonalità tra il vettore v = (a, b) ed il vettore
P0 P = (x − x0 , y − y0 ), cioè imponendo l’annullarsi del loro prodotto scalare:
(4)
a (x − x0 ) + b (y − y0 ) = 0
Sviluppando i prodotti si ottiene un’equazione del tipo (1), posto
c = − a x0 − b y0 .
Da questo ragionamento si trae una conclusione importante:
S. Benenti - Geometria Analitica - La retta
(4.2.2012) - 2
Proposizione 1. Data una retta di equazione a x + b y + c = 0, il vettore
a
v=
b
è ortogonale alla retta.
Di qui segue che:
Proposizione 2. Due rette di coefficiente angolare m ed m0 sono parallele se e solo se
m = m0 , ortogonali se e solo se m m0 = − 1:
)
y = mx+q
rette parallele
m = m0
⇐⇒
y = m0 x + q 0
rette ortogonali
m m0 = − 1
Dimostrazione. Scriviamo l’equazione delle due rette secondo la forma generale (1):
m x − y + q = 0,
m0 x − y + q 0 = 0.
Esse sono rispettivamente ortogonali ai vettori
v = (m, −1),
v 0 = (m0 , −1).
La condizione di parallelismo è quindi m = m0 , mentre la condizione di ortogonalità è
v · v0 = m m0 + 1 = 0, cioè m m0 = − 1.
Problema 2. Retta passante per due punti P0 = (x0 , y0) e P1 = (x1 , y1 ). Si considerino il generico punto P = (x, y) del piano ed i due vettori P0 P1 e P0 P (applicati nel
punto P0 ). Si osserva allora che il punto P è allineato con gli altri due punti, e quindi
sta sulla retta da questi individuata, se (e solo se) questi due vettori sono paralleli, cioè se
P0 P1 × P0 P = 0. Siccome hanno componenti
x1 − x0
x − x0
P0 P1 =
,
P0 P =
y1 − y0
y − y0
la condizione di parallelismo si traduce nell’equazione (vedi Oss. 5, §10.4)
(5)
(x − x0 )(y1 − y0 ) = (y − y0 )(x1 − x0 )
la quale può anche scriversi
(6)
x − x0
y − y0
=
x1 − x0
y1 − y0
se i denominatori non si annullano (cioè se i due punti non determinano una retta parallela
ad uno degli assi). La (5), o la (6), è l’equazione della retta cercata.
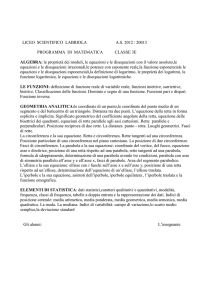
Problema 3. Distanza di un punto da una retta. Si consideri una retta r, di equazione
ax+by+c = 0, ed un punto P0 di coordinate (x0 , y0 ). Si vuole calcolare la sua distanza dalla
retta. Se si prende un qualunque punto P1 (x1 , y1 ) di r, la distanza di P0 da r è |P1 P0 || cos θ|,
dove θ è l’angolo compreso tra il vettore P1 P0 e la retta perpendicolare a r passante per
S. Benenti - Geometria Analitica - La retta
(4.2.2012) - 3
P1 . Se quindi si considera il vettore v = (a, b) ortogonale alla retta, tenuto conto che dalla
definizione di prodotto scalare si ha |v · P1 P0 | = |P1 P0 ||v| | cos θ|, si ha successivamente:
|v · P1 P0 |
|v|
|ax0 + by0 − (ax1 + by1 )|
|a(x1 − x0 ) + b(y1 − y0 )|
√
√
=
=
.
a2 + b2
a2 + b2
d(P0, r) = |P1 P0 || cos θ| =
Ma ax1 +by1 +c = 0 perché il punto P1 appartiene a r (e quindi le sue coordinate soddisfano
l’equazione). Di qui si ricava c = − ax1 − by1 e sostituendo nell’espressione precedente si
ricava la formula finale che risolve il problema:
d(P0 , r) =
|ax0 + by0 + c|
√
a2 + b2
..
..
..
...
.......·...
0
..
... ... ........·
.·.
...
... ... ...
·. ....
..
... ... ...
.·.·. ...
.
.
.
.
.
.
.
..
.
.
·
.
.
..
..·
.... ... ... ... ...
..·
..
..
.·
..
..·.·
..
..
..·
·
.
..
..
.
·
.
.·
..
..
.
·
.
..
.·
..
.
·
..
.·
.
·
..
.
..
..·
.
·
..
..
.
·
.
..
..
.
·
..·
..
.
·
..
.·
..
.
.
·
..
.·
..
.
.
·
..
..
.
.·
.
..
·
..
.
·
.
..
.
·
.
..
.·
..
..
..
.·.·
.
.
·
..
..
.
·
.
........·
.
...
·
..
..
..·.·...·
..·
.·.··
...
.
·
..·.·.·..·.·..·.·.·
..·.·.·
.·
. ..·.·.·
..·.·.·
.
..
.
·
..·.·.·..·.·.·.·
.·
.
.
.
.
.
..·
.
.
..
·
.
·
.
.
·
.
.
·
·
.
·
.
..·.·.·..·.·.·····
.. ..·.·
......·
..·.·.·..·.·.·..·.·.·.····
.. .·.·
..·.·.·
..·.·.·
.
.. .·.·
..·.·.·..·.·.·.·
..·.·.·
..·.·.·
.·.·
...·
......·
..·.·.·
.
.
.
.
·
·
·
.
·
·
•·.···
1 .....
..
..
...
..
...
..
...
...
...
..
P
d
θ
θ
P
r
ax + by + c = 0
a
v=
b
S. Benenti - Geometria Analitica - La circonferenza
(4.2.2012) - 4
La circonferenza
Un altro esempio notevole di luogo geometrico è la circonferenza: è l’insieme dei punti
del piano aventi distanza costante R (raggio) da un punto fisso P0 (centro). Per ottenere
l’equazione di questo luogo si considera il punto P0 = (x0 , y0 ) e il vettore generico P0 P ; si
impone quindi la condizione che questo vettore abbia modulo costante pari a R: |P0 P | = R.
Elevando al quadrato si trova la condizione equivalente P0 P 2 = P0 P · P0 P = R2 che a sua
volta si traduce, considerando le componenti di questo vettore, nell’equazione
(x − x0 )2 + (y − y0 )2 = R2
(1)
Questa dunque è l’equazione della circonferenza di centro P0 = (x0 , y0 ) e raggio R.
Sviluppando i quadrati e portando R2 a primo membro l’equazione (1) diventa
x2 + y 2 − 2x0 x − 2y0 y + x20 + x20 − R2 = 0.
(10 )
Si trova cosı̀ un’equazione di secondo grado del tipo
x2 + y 2 + ax + by + c = 0
(2)
posto
(3)
a = − 2 x0 ,
b = − 2 y0 ,
c = x20 + y02 − R2 .
Queste ultime uguaglianze si possono risolvere rispetto a (x0 , y0 , r) e R, ottenendo
(4)
a
x0 = − ,
2
b
y0 = − ,
p2
√
R = x20 + y02 − c = 21 a2 + b2 − 4c.
Si giunge cosı̀ a questa conclusione:
Proposizione 1. Un’equazione del tipo (2) rappresenta una circonferenza reale di centro
e raggio dati dalle (4), purché sia
(5)
a2 + b2 − 4c > 0.
Va infatti osservato che, assegnati i numeri (a, b, c), il radicando che compare nella (2)
deve essere non negativo, altrimenti l’equazione (2) non rappresenta più una circonferenza
reale, ma complessa. Nel caso in cui il radicando è uguale a 0, la circonferenza degenera in
un punto.
Osservazione 1. Si noti che se un’equazione che rappresenta un luogo geometrico, e
ne abbiamo già visto due esempi, viene moltiplicata (o divisa) per unqualunque numero
(diverso da zero), la nuova equazione rappresenta ancora lo stesso luogo. Infatti se una
coppia di numeri (x, y) soddisfa alla prima equazione, soddisfa ovviamente alla seconda (si
veda il paragrafo successivo sui Principi Generali).
Tenuto conto di questa osservazione possiamo concludere che
S. Benenti - Geometria Analitica - La circonferenza
(4.2.2012) - 5
Proposizione 2. Un’equazione di secondo grado in (x, y) rappresenta una circonferenza
se e soltanto se:
(a) le potenze x2 e y 2 hanno coefficienti uguali (che riduciamo uguali a 1);
(b) manca il termine rettangolo xy;
(c) vale la condizione (5).
Osservazione 2. Le formule (4) consentono di individuare subito il centro e il raggio della
circonferenza espressa da un’equazione del tipo (2). Per esempio, l’equazione
x2 + y 2 + 2x − 4y + 1 = 0
rappresenta una circonferenza di centro P0 = (−1, 2) e raggio 2. Infatti dal confronto di
quest’equazione con la (2) si vede che a = 2, b = −4 e c = 1, per cui dalle (4) segue x0 = −1,
y0 = 2, R = 2.
S. Benenti - Geometria Analitica - Principi generali
(4.2.2012) - 6
Principi generali
La Geometria Analitica studia le proprietà geometriche delle figure attraverso le proprietà algebrico-analitiche delle equazioni (o disequazioni) che le rappresentano.
Un’equazione del tipo
(1)
F (x, y) = 0
dove a primo membro compare una funzione a due variabili F (x, y) rappresenta un
insieme di punti del piano riferito a coordinate cartesiane (ortogonali e monometriche)
(x, y): stanno in quest’insieme tutti e soli i punti le cui coordinate soddisfano l’equazione.
L’insieme rappresentato da un’equazione del tipo (1) è in genere una curva, ma
potrebbe anche essere costituito da più curve, da punti ”isolati”, o addirittura essere
l’insieme vuoto (nel campo dei numeri reali). Esempio:
x2 + y 2 − 1 = 0,
2
2
x + y = 0,
x2 + y 2 + 1 = 0,
x2 − y 2 = 0,
circonferenza di raggio 1 e centro l’origine,
l’origine,
insieme vuoto,
le due rette bisettrici dei quadranti.
Nel caso di una retta o di una circonferenza la funzione F è rispettivamente del tipo
F (x, y) = ax + by + c,
F (x, y) = x2 + y 2 + ax + by + c,
con (a, b, c) numeri reali.
Osservazione 1. Come già si è osservato (Oss. 1, § precedente), la moltiplicazione di
un’equazione per un numero diverso da 0, o per una funzione mai nulla, non cambia l’insieme
di punti rappresentato.
Osservazione 2. Se gli insiemi A e B sono rappresentati rispettivamente dalle equazioni
F (x, y) = 0 e G(x, y) = 0 allora l’equazione prodotto
(2)
F (x, y) G(x, y) = 0
rappresenta l’insieme unione A ∪ B. Infatti i punti che soddisfano anche ad una sola delle
due equazioni soddisfano alla (2), viceversa, un punto che soddisfa alla (2) annulla o la F
o la G e quindi sta in almeno uno dei due insiemi. Invece il sistema di equazioni
F (x, y) = 0,
(3)
G(x, y) = 0,
rappresenta l’insieme intersezione A∩B. Infatti, i punti di intersezione stanno in entrambi
gli insiemi e hanno quindi coordinate che soddisfano contemporaneamente a entrambe le
equazioni. Dunque il problema della ricerca delle soluzioni di sistemi di equazioni in due
variabili (x, y) può interpretarsi geometricamente come ricerca delle intersezioni di curve
piane.
Esempio 1. L’equazione
x2 − y 2 = 0
rappresenta una coppia di rette e precisamente la coppia delle due bisettrici dei quadranti
individuati dagli assi coordinati. Infatti essa equivale all’equazione
(x − y)(x + y) = 0
S. Benenti - Geometria Analitica - Principi generali
(4.2.2012) - 7
e le due equazioni
x − y = 0,
x+y = 0
rappresentano appunto le due bisettrici.
Esempio 2. Possiamo affermare che un sistema di equazioni del tipo
ax + by + c = 0,
x2 + y 2 + a0 x + b0 y + c0 = 0,
ha al massimo due soluzioni (reali). Infatti la prima equazione rappresenta una retta e la
seconda una circonferenza (se (a0 )2 + (b0 )2 − 4c0 > 0) e sappiamo che una retta ed una
circonferenza hanno due punti d’intersezione (se sono secanti), o uno (se sono tangenti) o
nessuno. L’assenza di soluzioni del sistema potrebbe anche essere dovuto al fatto che la
seconda equazione non è una circonferenza reale ma complessa nel caso in cui (a0 )2 + (b0 )2 −
4c0 < 0.
Esempio 3. La ricerca delle soluzioni di un sistema di equazioni lineari a due incognite
(x, y), cioè un sistema del tipo
ax + by + c = 0,
(4)
a0 x + b0 y + c0 = 0,
dove (a, b, c, a0, a0 , b0, c0 ) sono dei numeri assegnati, equivale geometricamente alla ricerca
delle intersezioni delle due rette rappresentate dalle equazioni. Osserviamo allora subito
che se i vettori v = (a, b) e v0 = (a0 , b0), che sappiamo essere ortogonali alle rette, sono tra
loro paralleli allora le rette sono anch’esse parallele e quindi non hanno intersezione, a meno
che esse non coincidano. La condizione di parallelismo delle rette è quindi v × v 0 = 0, cioè
(5)
ab0 − a0 b = 0.
Si noti che, in base all’Oss. 1, le due rette coincidono se e solo se una delle equazioni si
ottiene dall’altra moltiplicandola per un numero, cioè se le terne (a, b, c) e (a0 , b0, c0 ) sono
proporzionali, il che significa a = λa0 , b = λb0 , c = λc0 , con λ opportuno (si scrive allora,
più sinteticamente, (a, b, c) = λ(a0 , b0, c0 )). Si noti ancora che la condizione di parallelismo
(5) si ritrova direttamente come condizione di non risolubilità del sistema di equazioni. Si
può infatti risolvere il sistema (4) moltiplicando la prima equazione per a0 e la seconda per
a (supposti entrambi non nulli, altrimenti il sistema è anche più semplice) e sottraendo
membro a membro. Si ottiene l’equazione
(a0 b − ab0 )y + a0 c − ac0 = 0
che , nel caso a0 c − ac0 6= 0, può risolversi rispetto alla y se e solo se a0 b − ab0 6= 0, cioè la
(5) non è verificata.
Le considerazioni svolte trovano una naturale estensione allo spazio, riferito a coordinate cartesiane (x, y, z). Un’equazione
F (x, y, z) = 0
rappresenta in generale una superficie nello spazio (potrebbe degenerare in curve o punti).
Un sistema di equazioni rappresenta l’insieme intersezione delle superfici rappresentate dalle
singole equazioni.
Esempi:
S. Benenti - Geometria Analitica - Principi generali
(4.2.2012) - 8
(a) Un’equazione di primo grado
ax + by + cz + d = 0
rappresenta un piano ortogonale al vettore v = (a, b, c).
(b) un sistema di equazioni lineari
ax + by + cz + d = 0,
a0 x + b0 y + c0 z + d0 = 0,
rappresenta una retta (intersezione dei due piani rappresentati dalle singole equazioni)
purché i due piani, cioè i vettori v = (a, b, c) e v0 = (a0 , b, c0), non siano paralleli.
(c) Un’equazione di secondo grado del tipo
x2 + y 2 + z 2 + ax + by + cz + d = 0,
rappresenta una sfera di centro P0 di coordinate
a
x0 = − ,
2
b
y0 = − ,
2
c
z0 = − ,
2
e raggio
R=
1
2
p
a2 + b2 + c2 − 4d.
S. Benenti - Geometria Analitica - L’ellisse
(4.2.2012) - 9
L’ellisse
Fissiamo sul piano due punti F1 e F2 e per ogni punto P del piano consideriamo le due
distanze
r1 = |F1 P |,
r2 = |F2 P |
e la loro somma S = r1 + r2 . Si tratta di una funzione scalare sul piano.
Vogliamo determinare e studiare il luogo dei punti P del piano definito dalla condizione
S = r1 + r2 = costante
Questo luogo risulta essere una curva che chiamiamo ellisse. I punti fissi F1 ed F2 vengono
detti fuochi. La retta che unisce i fuochi si chiama asse focale o asse primario. Il punto
mediano C del segmento F1 F2 si chiama centro. La retta perpendicolare all’asse focale e
passante per C si chiama asse secondario.
Osserviamo innanzitutto che questo luogo è, per la sua definizione, simmetrico rispetto:
(1) all’asse focale,
(2) all’asse secondario,
(3) al centro C.
Un’ulteriore preliminare osservazione è che, essendo la somma r1 + r2 costante, quindi
ovviamente limitata, anche l’ellisse sarà una curva limitata.
L’ellisse è dunque una curva completamente definita dai due fuochi e dalla costante S.
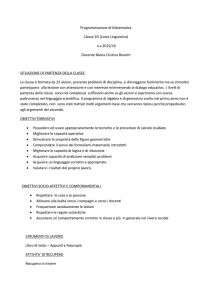
Consideriamo i punti di intersezione dell’ellisse con il suo asse focale. Consideriamo in
particolare quello che sta dalla parte di F1 , che denotiamo con A (vedi figura).
..
..
..
..
..
...
..
...
+ .....
..
... ..
... ...
... ...
...
... .
..
...
... ...
.
..
...
... ...
..
2 ......
... ..
..
.. ..
.
.. 1
..
... ...
.
..
.
.
... .. .....
..
... .. ...
..
... ....
.......
..
.............
. ..
.
..
.
.
...... .............
.
..
............ ............
... .... ....
.
....................................................
.
.
.
.
.
.
... ..
...... ......
...
... ...
............. .............
..
............. .............
...
... ..
............ ............
...
... ..
......................................
.
..
.
.
.
.
.
1
.
.
.
.
.
.
.
.
.
.
.
... .................................
...
.. .. ............
.
...
...
........
...............
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
............
...
.............
..
.............
...
............
..
............
...
.............
.. ........................
........................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
........
............
..
.............
..
............
..
.............
.
.
2
.
.
.
.
.
.
.
.
.
.
.
.......
P
B
•
r
•
r
b
a
F
•
C
•
•
F
•
A
c
Indichiamo con c la distanza di F1 dal centro C, e con a la distanza di A da C.
Misuriamo la somma r1 + r2 nel punto A. Risulta
S(A) = (a − c) + (a + c) = 2a
Pertanto l’ellisse risulta definito dall’equazione
r1 + r2 = 2a
S. Benenti - Geometria Analitica - L’ellisse
(4.2.2012) - 10
L’ellisse intersecherà anche l’asse secondario in due punti B+ e B− , aventi entrambi
ugual distanza distanza b dal centro C. Prendendo P = B+ (o P = B− ) troviamo, utilizzando il Teorema di Pitagora (vedi figura), che b2 + c2 = a2 , ovvero che
b2 = a2 − c2
Equazione canonica dell’ellisse.
Vediamo ora di scrivere l’equazione dell’ellisse finora studiato. Poniamoci nelle condizioni più favorevoli che, come constateremo, sono le seguenti:
(1) i fuochi F1 ed F2 stanno sull’asse x,
(2) sono simmetrici rispetto all’origine, che è il centro dell’ellisse.
I fuochi hanno quindi coordinate F1 = (c, 0), F2 = (−c, 0). Si vede allora che
r12 = (x − c)2 + y 2 ,
r22 = (x + c)2 + y 2 .
Quindi l’ellisse è descritto dall’equazione
p
p
(x − c)2 + y 2 + (x + c)2 + y 2 = 2a,
ricordando che la somma costante r1 + r2 è uguale a 2a. Scriviamo questa equazione cosı̀,
p
p
(x + c)2 + y 2 = 2a − (x − c)2 + y 2 ,
ed eleviamo al quadrato entrambi i membri:
(x + c)2 + y 2 = 4a2 + (x − c)2 + y 2 − 4a
Abbiamo delle semplificazioni successive notevoli:
(x + c)2 = 4a2 + (x − c)2 − 4a
p
(x − c)2 + y 2 .
p
(x − c)2 + y 2 ,
p
2cx = 4a2 − 2cx − 4a (x − c)2 + y 2 ,
p
4cx = 4a2 − 4a (x − c)2 + y 2 ,
p
cx = a2 − a (x − c)2 + y 2 ,
che ci portano all’equazione
a2 − cx = a
Eleviamo ancora una volta al quadrato,
p
(x − c)2 + y 2 .
a4 − 2ca2 + c2 x2 = a2 [(x − c)2 + y 2 ],
e sviluppiamo il secondo membro,
a4 − 2ca2 + c2 x2 = a2 [x2 + c2 − 2cx + y 2 ].
Semplifichiamo ancora,
a4 + c2 x2 = a2 [x2 + c2 + y 2 ],
S. Benenti - Geometria Analitica - L’ellisse
(4.2.2012) - 11
e ricollochiamo gli addendi,
(a2 − c2 ) x2 + a2 y 2 = a2 (a2 − c2 ).
Poniamo (vedi sopra)
b2 = a2 − c2 .
Troviamo
b2 x2 + a2 y 2 = a2 b2 .
Non resta che dividere per a2 b2 e troviamo (finalmente!) l’equazione cercata, in nuna forma
veramente semplice malgrado la fatica impiegata:
x2
y2
+
=1
a2
b2
Questa è l’equazione canonica dell’ellisse. Ricordiamo che b2 = a2 − c2 , dove c distanza
dei fuochi dal centro, cioè dall’origine.
Tutto quanto abbiamo detto finora è sintetizzato nella figura seguente:
y
.
..........
.....
..
...
..
..
+ ......
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
... ....................................................
......
...........
...............
.
.......
...........
..... ...
.........
.
.
.
.
.... ...........
.
.
.
.
.. ....
.....
... .. .. .............
.
.
.
.
.
.
.
.
.
.
... ..
.......
.
..
.
.
.
.
..
.
.
.
.
2
.
.
.
.
......
.
..
....
......
.....
..... ....
... ..
.....
....
..
... ...
... ...
....
....
.
.
.
.
.
.
.
.
.
.
....
... ........
...
.
.
.
...
.
.... ...
..
1
.
...
.
.
.
.
.
..
... ... ...
...
.
..
.
.
.
.
.. ...
...
...
.
.
.
.
.
.
.
.
.
... ..
...
...
.
..
.
.
.
.
.
...
...
.
.. ...
.
.
..
.
.
.
..
...
... ...
...
.
.
.
...
.
..
..
...
. ...
.
.
.
...
.
.
..
..
... ...
.
.
.
.
.
..
..
. .......................................................................................................................................
.
.
.
.
.
.
.
.
....................................................................................... ...................................................................................................................................................................................................................................................................
.
...
...
...
...
...
...
..
...
2
1
...
....
....
...
..
.........................................................................................
..
...
...
...
...
...
..
...
.
.
.
....
...
....
....
...
....
....
...
.....
...
....
.
.
.
.....
.
.
...
......
.....
......
......
.......
...
.......
......
........
..
.......
.
.........
.
.
.
.
.
.
.
.
...
..........
.....
............
...........
...................
............
.....................................................................
...
...
..
...
B
•
P
•
r
b
F
•
C
r
a
•
•
F
•
x
A
c
Proprietà focale dell’ellisse.
Sappiamo che il gradiente di una funzione f (x, y),
∇f =
fx0
fy0
è un vettore ortogonale ad ogni curva di equazione
f (x; y) = costante.
Sappiamo inoltre che se in particolare la funzione f misura la distanza di punto fisso F da
un generico punto P , f = |F P |, allora
∇|F P | = u,
S. Benenti - Geometria Analitica - L’ellisse
(4.2.2012) - 12
dove u è il campo radiale unitario di centro F .
In base queste due proprietà possiamo affermare che:
(1) ∇S = ∇(r1 + r2 ) è un vettore ortogonale al luogo cercato,
(2) ∇r1 = u1 e ∇r1 = u2 sono campi vettoriali radiali unitari di centri F1 e F2
rispettivamente.
Di conseguenza,
∇S = ∇(r1 + r2) = ∇r1 + ∇r2 = u1 + u2 .
Abbiamo allora dimostrato che: in ogni punto P ∈ E il vettore ∇S è la somma dei due
vettori unitari u1 e u2 .
.....·.·....
..·
.·.·
.
.
·
.·..·
..·
.
·
.·..·
·.
..·.·
.
..·.·..·....
..........
.·..·
·.·..
..·
....
.
·
··.·.. 1 ..·..·
...
··.·..
..
.·.·
.·..·
....
·.·...
. .
...
··.·.
..·.·
........·..·.·
.·.·
....·.·..····.
.·.
...
.
·.·.·. ..·.·..· ....·.·.·..·.·.·.·..·.·..·.·.··
...
..........
.
.
·
.
.
.
.
.
·
·
.
·. . ....···
.......................................................................................
2
.................
.............. ··.·.....·.·.·....·.·..·.·..·.·.·..···
............
........··.....·.·..·.·.··
.....
..........
...
...... ··................................
.........
.
.
.
.
.
.
.
.
.
.
.
.
.................
..
...
.....
...... ..........
.....
......
..
2 .............
...... ...
...
......
.....
..
...
.....
..
....
..
......
.
....
.
.
.
.
....
.
.
.
.
.
..
...
.
..
....
.
.
.
.
.
.
.
.
..
...
....
..
.
.
.
.
.
.
.
.
...
... ...
.. 1
.
..
.
.
.
.
.
.
...
.
...
.
.
.
.
.
..
.
...
.
.
.
.
.
.
....
.
.
.
.
.
...
.
.
.
.
.
.
.
....
.
.
.
..
...
.
.
.
.
.
..
...
.
.
.
..
.
.
.
.
.
..
.
..
...
.
.
.
.
.
....
.
..
..
.
...
.
.
.
.
.
.
..
..
.
..
.
...
.
.
.
.
..
.
.
.
.
.......................................................................................................................................................................................................................................................................................................................................................................
...
.
..
.
...
...
....
...
....
..
2
1
...
..
...
...
...
...
...
..
.
.
.
...
.....
...
...
..
...
...
...
....
....
....
....
.
.
.
.
.....
.....
....
.....
....
...
......
......
......
...
......
.
.......
.
.
.
.
.
.......
...
.....
.........
........
..........
.........
...
.............
..........
.
..................
............
.......................................................................
...
..
...
....
.
∇S
y
u
r
u
•
P
r
F
•
C
•
•
x
F
Questo significa che, se consideriamo la retta tangente all’ellisse in P come uno specchio,
allora il raggio che parte da F1 e raggiunge P viene riflesso in un raggio che va da P a F2
(e viceversa). Questa è una prima proprietà dell’ellisse, che chiamiamo proprietà focale.
Di qui la ragione per cui F1 e F2 vengono detti fuochi.
y
.
..........
....
..
...
..
...
...
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..............................................
.
.
.
.................
.
.
.
.
.
.
.
. . .....
.
.
.
...
.
.
.....
....
.
.
.
.
.
.
.... ... ....................
.
.
.
.
.
..
.
.....
.
....
...............
..
.
.
.
.... ......
.
.
.
.
.
.
.
..... .... .........
...... ..
. ......... .. ..............
.... ..
.
.
.
.
.
.
.
.
.
.
.
.
..... . .....
.......
..
.......
.......
......
.........
......
..
..
...... ...
.
.. ...........
.........
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
...... ..... .. ...... .......
.. ........................
.
.... ............. ..
........ ... ........
..
..
....
.......... ...
.... ...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.. .......
.
.
.
.
.
.
.
.
.
.
. ..............
..
......... ..
....
....
..... ....................... .........
..
..
......... ...
.
.
..
.
.
.
.
.
. .....................
...
.
.
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
...
.
.
.. ....
.... . ....
.......
.. ...
..
.. ..
..... ........................ ... ......................... .........
..................... ...
.
.
.
.
.
..............
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.................. ..
.. .....................
..............
...... ....
.. ........
.
.. .....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...... .................... .. .
. . .....
................................
.
...
... ... ............
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
..
..
.
.
.
..
.
.
..
... .. .. ... ................................................................................................................. .................... ... ... ... ......
...
...
.... .. .. .. .... ...... ........
.
..
... ..
.
.
... . ... ...................... ................................ .... ............................................................................. ... .....
...
..
... .....................................
....................................... ...
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
....................................................................................................................................................................................................................................................................................................................................................................
..
...
.
.
.
.
...
...
.
.
.
.
...
.
.
.
.
2
1
.
.
...
...
...
...
....
...
...
..
...
...
..
.
...
.
.
.
...
.....
...
....
...
....
....
....
..
.....
...
.
.
....
.....
.
.
......
...
......
......
......
...
.......
......
...
.......
........
.
.
.........
.
.
.
.
.
.
..........
.....
....
.............
..........
.
..................
............
.......................................................................
....
..
...
..
.
P
•
F
•
C
•
•
x
F
S. Benenti - Geometria Analitica - L’iperbole
(4.2.2012) - 13
L’iperbole
Vogliamo ora considerare, sempre rispetto a due punti fissi F1 e F2 del piano, la curva
dei punti punti del piano per cui è costante la differenza delle distanze da F1 e F2 :
D = r1 − r2 = costante
Chiamiamo questa curva iperbole di fuochi F1 e F2 . Valgono le stesse osservazioni iniziali
di simmetria fatte per l’ellisse (vedi sopra). In questo caso però la curva in questione risulta
illimitata.
..
..
..
..
..
...
..
.
...
... ..
..
.. ...
..
...
..
..
...
..
..
.
.
..
...
..
...
..
.
..
.
..
...
.
..
.
..
..
..
.
.
..
.. 1
.. .....
2
..
.. ..
.
....
..
...
.
.
..
. ..
.
...........
.
..
.............
... ...
.
.
..
.............
..
..
.
..
.
1 .................................
..
.
.
.
.
.
.
. .......
...
..
.............
..
..
.............
..
..
.............
..
..
.............................
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.. ....................................
...
.... ...
.
...
............
........
............. ....
...
.............
............
...
.
.
.
.
............
.
...
.
.
.
.
.
.
.
.
.
.
.............
......
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.......
2 ..................................
......................
.
..
.............
..
.............
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
..
.............
..
............
.............
P
•
r
r
a
F
•
A
c
•
C
•
F
•
Consideriamo il punto A intersezione dell’iperbole con l’asse focale. Denotiamo al solito
con c e a le distanze di F1 da C e A, rispettivamente. Valutiamo la differenza D = r1 − r2
nel punto A. Risulta
D(A) = (c − a) − (c + a) = −2a.
Pertanto l’iperbole risulta definita dall’equazione
r1 − r2 = − 2a
Trasportiamo ora il segmento F1 C, traslando C lungo l’asse verticale, fino a che F1
raggiunge A. In questo modo si individua un punto B la cui distanza b dal centro è tale
che (teorema di Pitagora):
b2 = c2 − a2
..
..
..
..
...
...
..
.
...
... ..
...
.. ...
...
...
..
...
..
..
.
2
.
..
.
.........
...
..
.
.
.
.
... ....
..
...
..... ....
.
.
..
...... .... .....
.. 1
..... ........
..
..... ... ....
..
....
.......
..
....
..
.
.
.
.
....
..
....
.. ......
.
.............
.
.
..
....
.. .....
.............
.
.
..
.
....
....
............
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
1 .......
.....
....
..
..
....
....
.........................
...
..
....
.....
...
.............
....
..
.....
.............
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.....
.
.............
..
.... ................................................
..
........................
.
.
...
........
................
.
.
...
.
.
.
.
.
.
.
.
.
.............
.
.
.
..
...
............
.............
...
..
.............
.
.
.
... ........................
.
.
.
.
.
.
.
.
.
.
.
.
... ..................
2 .............................
..........
....
..
............
..
.............
.
.
.
.
.
.
..
.
.
.
.
.
.
.....
.
.
..
.
.
.
.
.
.
.
.
.
.
..
.......
.
.
.
.
.
.
.
.
.
.
.
....
B•
P
•
r
r
c
b
a
F
•
•
C
•
A
c
F
•
S. Benenti - Geometria Analitica - L’iperbole
(4.2.2012) - 14
Equazione canonica dell’iperbole.
Come abbiamo fatto per l’elliss, ci poniamo nelle seguenti condizioni: i fuochi F1 ed
F2 stanno sull’asse x e sono simmetrici rispetto all’origine, centro dell’iperbole.
y
...
.
.. ..
...
.........
... ...
...
.....
.......
...
.
.
.
.
.
.
...
...
....
... ...
...
.. ..
...
...
... ...
..
...
.. ....
.
.
.
.
...
...
... ...
...
... ...
.....
...
.. ..
...
...
.. ....
...
.
...
.
...
...
... ...
...
.. ..
..
...
.. ..
....
...
... .....
.
.
.
...
.....
...
... ...
.. ..
...
...
... ...
...
...
.. ...........
...
.
.
.
..
...
....
...... . ... ..
...
....... .... ..
..
...
... ....
.. .
....
...
. ... ....
.
.. ...
.
...
.
...
.
.
...
...
..
..
... . ......
..
..
.
...
.
.
.
.
.
.
..
.
.
...
.. ....
..
...
...
... 2
........
.
.
.
.
.
.
.
..
... ..... ..
..
...
...
...... .
.. 1
..
.
.
.
.
.
.
.
.
.
. ..
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
...
.
.
..
.
.
.
.
.
.
.
.
.
.
...
...
.
..
.
.
.
.
.
.
.
.
.
.
.
.
... .. ..
.
...
..
.
.
.
.
.
.
.
... .. ..
.
...
..
.
.
.
.
.
.
.
.
... .. ..
.
...
..
.
.
.
.
.
.
.
... .. ..
.
2 ......
1
.
..
.
.
.
.
..................................................................................................................................................................................................................................................................................................................................................................................................................
.....
.
.
.
.
.
..
.. ... ....
.
...
... .. ...
...
... ..... ....
.
..............................................................................................
...
..
...
.
.
.
...
.
...
...
.
.
.
.
...
.
..
..
.
.
...
...
...
..
.
.
.
...
.
..
..
.
.
.
.
...
...
..
..
.
.
...
...
.
..
.
.
...
...
.
.
.
.
.
.
.
...
...
.
..
.
.
...
...
...
..
.
.
...
.
...
.
..
.
...
.
.
...
.
..
.
...
.
.
.
...
.
..
.
.
.
... ....
..
..
.
.
.
... ....
.
..
.
.
... ..
.....
...
... ...
... ...
...
...
... ...
...
...
... ...
..
.
.
.
... ..
...
.
.
.
... ...
.
..
.
.
... ...
.
...
.
.
.
... ...
..
..
.
... ...
.
..
..
... ...
.
.
.
.
.
... ...
.
.
...
... ...
..
.
.
... ...
..
..
.
.
... ...
.
.
.
.
.
... ...
...
..
.
... ..
.
.
.
.
... ....
.
.
...
..
... ...
.
.
.. .
..
...
P
•
r
F
•
•
C
a
•
A
c
r
•
F
x
I fuochi hanno quindi coordinate F1 = (c, 0), F2 = (−c, 0). Quindi l’iperbole è descritta
dall’equazione
p
p
(x − c)2 + y 2 − (x + c)2 + y 2 = − 2a,
ricordando che la differenza costante r1 − r2 è uguale a −2a. Partendo di qui operiamo
diversi passaggi algebrici e semplificazioni:
p
p
(x − c)2 + y 2 = (x + c)2 + y 2 − 2a,
p
(x − c)2 + y 2 = (x + c)2 + y 2 − 4a (x + c)2 + y 2 + 4a2
p
−4cx = −4a (x + c)2 + y 2 + 4a2 ,
p
a (x + c)2 + y 2 = a2 + cx,
a2 (x2 + c2 + 2cx + y 2 ) = a4 + c2 x2 + 2acx,
a2 (x2 + c2 + y 2 ) = a4 + c2 x2 ,
(a2 − c2 ) x2 + a2 y 2 = a2 (a2 − c2 ),
(c2 − a2 ) x2 − a2 y 2 = a2 (c2 − a2 ),
Ricordando che b2 = c2 − a2 , troviamo l’equazione canonica dell’iperbole
x2
y2
−
=1
a2
b2
S. Benenti - Geometria Analitica - L’iperbole
(4.2.2012) - 15
Asintoti dell’iperbole.
Le intersezioni di una generica retta y = mx passante per l’origine con l’iperbole si
ottengono sostituendo y = mx nell’equazione canonica:
x2
m2 x2
−
= 1.
a2
b2
Si ottiene l’equazione algebrica di secondo grado in x,
(b2 − m2 a2 ) x2 = a2 b2,
la quale porta a delle soluzioni x solo quando b2 − m2 a2 6= 0, cioè per
b
m 6= ± .
a
Le due rette di equazione
y=±
b
a
si chiamano asintoti dell’iperbole. Esse sono delle rette limite, nel sendo che ogni retta
che abbia coefficiente angolare m in valore assoluto minore di ab ha due punti intersezione
con l’iperbole, al contrario di tutte le altre rette, compreso l’asse y, che non hanno alcuna
intersezione.
Proprietà focale dell’iperbole.
y
.
.
...........
...
...
...
..
..
..
..
.
.
..
...
...
...
..
....
...
.
..
.
..
...
·...
..·.·...... 1
...
...
··...
..
...
··.·..
...
........
..
·.·.·..
...
.......·.
... ·..·...........
·.·... ............
.....·..··.·
.... ·.····.·..·.·.·
..·.·......
··..·. ...... ...·..·.·..·.·.·..·..·.·.···
····.·..·.·..·.·.......
...
·····.·..·.·..·.·..... ·..·.·.. ..... ....·.·.·...·.·.·.··
...
2
···.·.·.·..·.·.·....·.·.........·.·.·.·..···
...
··.·.··
...
.... ....
..
... .. .... ..
.
.
.
....
2 ........ ..... ...
...
...
... .
.... ...
...
....
.....
..
.....
... ... ....
..
......
.........
.
..
.
...
.........
.
..
.
.
.
.
.
.
.
.
.
.
.
.. 1
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
..
.
.
.
.
.
.
.
..
.
.
.
.
...
.
.
.
.
.
.
..
.
.
.
...
.
.
.
.
.
.
.
..
.
...
...
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
..
.
....
2 ..........
1
..
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..............................................................................................................................................................................................................................................................................................................................................................
...
..
..
...
...
...
..
.
............................................................................................
...
....
..
...
...
..
..
...
...
...
...
...
...
...
...
...
...
..
...
...
....
...
...
...
...
...
...
...
...
...
..
...
...
...
..
...
....
...
...
...
...
...
..
...
...
...
...
..
...
....
...
...
...
...
...
..
...
...
...
..
...
....
...
...
...
...
..
u
∇D
u
•
r
r
F
•
•
C
a
•
A
c
•
F
Essendo ora
∇D = ∇(r1 − r2 ) = ∇r1 − ∇r2 = u1 − u2 ,
x
S. Benenti - Geometria Analitica - L’iperbole
(4.2.2012) - 16
si ha che: in ogni punto P ∈ H il vettore ∇D, ortogonale all’iperbole, è la differenza u1 − u2
dei due vettori radiali unitari u1 e u2 .
Dal punto di vista ottico, questo significa che, se consideriamo la retta tangente all’iperbole in P come uno specchio, allora il raggio che parte da F1 e raggiunge P viene riflesso
in un raggio la cui retta d’azione passa per l’altro fuoco F2 . Questa è la proprietà focale
dell’iperbole.
y
.
·
..........
··
...
···
...
·
·
...
...
··
..
......
··
......
...
.......
··
.
..
.
.
.
·
.
..
··
...
.......
.......
...
··
......
....
......
···
.
.
.
.
.
·
...
.
..
·
...
.......
··
.......
...
··
......
...
·· .................
..
·
· ....
....
···.............
...
...
..·.·..·...
.
.
.
·
...
.
.
.. .
..
...
. ... ··· ...
...........
.....
...........
· .
..
...........
. ...
·· ....
...
............
.
... ..
·
.
.
.
.
.
.
.
.
·
.
..
.
.
.
.
.........
·· ....
.... ... ......
...........
.. ....
··
...........
.
·· ................................
..........
·
.
.
.
·
.
.
.
.
...
. ...·.....
... .. ....
..
.. ..... ··· .....
....
..
...... .
... ..
·· ....... ....
......... ...... ...
. ...
.
·
.
.
.
.
.
.
·
.
.
.
.
... ..
.. ...
.
.
·
.
.
.
.
.
.
.
·
.
.
..
... ..
... ..
··
.. ... ..
....
... ..
....
... ... .
... ..
··
...
........ ... ... ...
... .
·
.
.
·
.
.
.....
.
2 ........... ......
1
·
.
.
·
.............................................................................................................................................................................................................................··...................................................................................................................................
····
.....
...
···
...
···
..
···
....
...
··
...
···
..
···
..
··
...
···
....
...
···
...
···
..
···
...
··
..
···
....
...
···
...
···
...
···
...
..
···
....
···
...
···
...
...
···
...
··
..
···
....
···
...
...
···
...
···
...
···
...
···
..
···
...
.
•
•
F
•
•
•
x
F
·
Iperbole equilatera.
Nel caso a = b si ha un’iperbole equilatera di equazione
x2 − y 2 = a2
Gli asintoti sono le bisettrici dei quadranti; sono quindi fra loro ortogonali. Si possono
quindi prendere come assi coordinati. Si può dimostrare che in questo caso l’equazione
dell’iperbole diventa
xy = k
con
a2
.
2
Questa è l’equazione canonica dell’iperbole equilatera riferita agli asintoti.
k=
S. Benenti - Geometria Analitica - Lo specchio parabolico
(4.2.2012) - 17
Lo specchio parabolico
Consideriamo un esempio di applicazione alla fisica dei metodi della geometria analitica.
Ci si pone il problema di costruire uno specchio capace di convogliare, per riflessione, un
fascio di raggi paralleli in un unico punto, detto fuoco. La superficie di un tale specchio
dovrà necessariamente essere una superficie di rotazione avente come asse la retta passante
per il fuoco e parallela al fascio dei raggi incidenti. Questo problema si riduce quindi ad
un problema di geometria analitica piana: quello di determinare l’equazione della curva
rappresentante il profilo dello specchio avente la proprietà richiesta.
Posto che in ottica geometrica i raggi luminosi (nel vuoto o in un mezzo omogeneo)
sono rappresentati da rette e che l’angolo di riflessione di un raggio su di uno specchio piano
è uguale all’angolo di incidenza, il problema preliminare da risolvere è il seguente:
Problema 1: Data una retta r rappresentante un raggio incidente in un punto P0 =
(x0 , y0 ) di uno specchio piano rappresentato da una retta s, determinare il raggio riflesso
r∗ .
Rappresentiamo la retta r (raggio incidente) con l’equazione
(1)
a(x − x0 ) + b(y − y0 ) = 0,
e la retta r∗ (raggio riflesso) con l’equazione
(2)
a∗ (x − x0 ) + b∗ (y − y0 ) = 0.
Lo specchio è univocamente derminato da un qualunque vettore u = [α, β] ortogonale alla
retta s. Pertanto i dati del problema sono i numeri (a, b, x0, y0 , α, β), mentre le incognite
sono i numeri (a∗ , b∗ ).
y
..
........
..
..
...
...
..
...
...
..
..
.
...
.
..
...
..
...
..
...
...
.
.
...
..
...
...
...
..
..
........
...
..
...
...
...
....
...
..
..
..
.........
.
·
......
..
...
····
....
...
...
.....
····
...
...
....
.. ······
.
..
....
.
....
... ····
...
....
..
... ····
.....
...
.... .....·····
..
.... ..···
.....·
.
·.......·...·.............
0 ........ ... ... ... ... ...... ... ... ... ... ... ... ... .. 0..............·..·..·.·.·•
. . ..
...
....... ····· ... ........................
.
.
.
.
.
.
...
...
. .
...... ····
...
... ..... .... ..............
........
·
.
.
.
·
.
.......
.
·
.
.
...
.........
∗ .....................
.. ..... .....
····
..
.....
·
.
...
...
·
.
.
·
.
.
.
·
.
...
...
...
...
·
.
.
.
.
·
.
.
.
..
·
.
.
...
...
·
....
·
.
.
.
.
·
.
.
·
.
.
.
....
...
..
.
··
.
·
...
... ..............
.
.
...
......
...........
....... ...
.
.
....... ...
..
.......
.
.
.
.
.
.
.
.
.
.
........
∗
∗ ∗
...
.....
.......
...
..
...
..
...
......................................................................................................................................................................................................................................................................................
...
...
....
0
...
..
.
r
u = [α, β]
y
P
v = [a, b]
r
s
v = [a , b ]
x
Dimostriamo che la soluzione è espressa dalle formule
a (α2 − β 2 ) + 2 b α β
α2 + β 2
b (β 2 − α2 ) + 2 a α β
b∗ =
α2 + β 2
a∗ =
(3)
x
S. Benenti - Geometria Analitica - Lo specchio parabolico
(4.2.2012) - 18
Conderati i vettori v = (a, b) e v∗ = (a∗ , b∗ ) ortogonali alle rette r e r∗ rispettivamente,
il problema è ricondotto alla determinazione del vettore v∗ a partire dai vettori v e u.
Siccome questo vettore v∗ può essere determinato a meno di un fattore moltiplicativo, non
è restrittivo imporre che esso abbia lo stesso modulo di v: |v∗ | = |v|. Siccome la legge
riflessione implica che r∗ è simmetrica ad r rispetto alla perpendicolare a s, segue che il
vettore v ∗ è simmetrico a v rispetto alla stessa perpendicolare. Si può tradurre questa
simmetria con la condizione che la somma v + v ∗ (di vettori con lo stesso modulo) sia un
vettore parallelo a u e la differenza v − v∗ sia un vettore ortogonale a u. Dunque v∗ è
determinato dalle seguenti due condizioni:
(v − v ∗ ) · u = 0,
(v + v ∗ ) × u = 0,
che, in componenti, si traducono nelle condizioni
(a − a∗ )α = (b − b∗ )β,
(a + a∗ ) β = (b + b∗ ) α.
Queste formano un sistema lineare non omogeneo nelle incognite (a∗ , b∗ ) componenti di v∗ ,
α a∗ + β b∗ = a α + b β,
β a∗ − α b∗ = b α − a β,
la cui soluzione è appunto data dalle (3).
Risolto il Problema 1, possiamo considerare il seguente:
Problema 2. Dato un raggio incidente r parallelo all’asse y, determinare il punto F
in cui il raggio riflesso colpisce l’asse y.
y
...
........
...
..
...
...
...
..
...
...
...
...
..
...
...
..
..
...
....
..
...
...
...
...
..
...
.........
..
.
...
.....
..
...
...
...
..........
...
·
.
...
. .......
··
......
...
....
......
...
··
..
·
......
·
..
.
·
......
......
··
...
.....
......
..
... ···
......
...
. ·
......
...
...... .... ··
...... .. ··
...
...
..
0 ....... ... ... ... ...... ... ... ... ... ... ... ... ... .. 0......................·.·..•.·....·....................................................................................
.. ·· .. ... ....
.
.
.
.
.
.
.....
.
... .....
.....
.
·
.
.
.
.
∗
.
·
.
..
.
.
....
.....
·· .. ...
....
....
..........
....
........ ...
·· ... ......
...
........
....
··
.
...
...
....
.........
.
·
.
.
.
.
.
·
.
...
.
.
....
...
..
.
·
·
.
... ................
....
...
.
·
.
.
.
.
·
.
.
.
•...
·
...
.
...
..
...
...
..
.
....
..
...........
...
.
..
...
..
...
∗
∗ ∗
..
...
.
..
.........................................................................................................................................................................................................................................................................................
..
..
...
..
0
...
..
.
r
u = [α, β]
v = [1, 0]
y
P
r
F
s
v = [a , b ]
x
x
L’equazione del raggio incidente è x = x0 , equazione della retta parallela all’asse y
passante per il punto P0 . Si ottiene ponendo nell’equazione (1)
a = 1,
b = 0.
S. Benenti - Geometria Analitica - Lo specchio parabolico
(4.2.2012) - 19
Di conseguenza i coefficienti (a∗ , b∗) dell’equazione (2) del raggio riflesso, dati dalle (3),
diventano
α2 − β 2
,
a
=
∗
α2 + β 2
(4)
2αβ
b∗ =
.
α2 + β 2
D’altra parte l’intersezione F del raggio riflesso r∗ con l’asse y, di coordinate (0, yF ), si
ottiene ponendo x = 0 nell’equazione (2):
− a∗ x0 + b∗ (yF − y0 ) = 0.
Quindi:
yF = y0 +
a∗
x0 .
b∗
Sostituendo i valori dati dalle (4), si trova che l’ordinata yF del punto F è
(5)
yF = y0 +
1 α2 − β 2
x0 .
2
αβ
Il Problema 2 è cosı̀ risolto.
Consideriamo adesso il caso in cui lo specchio s non è piano.
Problema 3. Sia il profilo dello specchio s rappresentato dal grafico di una funzione
(continua e derivabile) y = f (x). Dato un raggio incidente parallelo all’asse y, determinare
il punto F in cui il raggio riflesso colpisce l’asse y.
y
..
.......
....
...
...
..
..
..
....
...
...
...
...
·
...
...
...
..
··
...
..
··
·
...
·
....
·
..
...
··
...
...
..
···
...
·
·
...
.
...
··
....
...
··
..........
..
·
...
·
·
...
..
··
.....
...
··
...
.........
...
·· ··
..
.. ......
·
.
·
...
.
......
..
......
·· ···
.....
......
······
...
...
......
·
..
·
.
·
.
......
......
...
··
..... ···
......
...
.. ····
......
·
...
...... .... ····
0
..
...... .. ·
0
.
....··
·..
0 ...... ... ... ... ... ...... ... ... ... ... ... ... ... .. 0.....................·.·•
.
.
·
.
.
.
.
.
.
...
·
.
·
....
.
.
.
·
.
.
.
.
.
·
.
....
.
∗ . ..........
...
···· .
...
............
····· ...
...
.........
..
..
·······
.........
·
.
.
.
·
.
.
.
·
·
.
...
..
..
.. ................
········
·
..
........
·
·
.
•...
..
···· ·
·
·
·
..
·
....
·
·
·
·
...
..
·
·
·
·
·
..
·
...
·
·
·
·
·
·
.
.
·
············ .... ···············
..
···········...···········
..
..
....
.
.......................................................................................................................................................................................................................................................................................
...
...
....
0
...
..
.
y = f (x)
r
u
y
m = f (x )
P
r
F
s
x
x
Si può utilizzare il risultato del prolema precedente. Infatti il raggio riflesso non cambia
se lo specchio curvo viene sostituito da uno specchio piano il cui profilo è la retta s tangente
al grafico nel punto di incidenza (x0 , y0 ). Per il significato geometrico di derivata, questa
retta ha coefficiente angolare m = f 0 (x0 ). D’altra parte l’inclinazione del vettore u = (α, β)
S. Benenti - Geometria Analitica - Lo specchio parabolico
ortogonale a s, intervenuto nelle precedenti considerazioni, è
traduce dunque nella condizione
(4.2.2012) - 20
β
.
α
L’ortogonalità tra s e u si
β
1
1
= −
= − 0
.
α
m
f (x0 )
Si può quindi scegliere
α = f 0 (x0 ),
β = − 1.
Tenuto ancora presente che y0 = f (x0 ), dalla (5) segue allora che
2
(6)
yF = f (x0 ) +
1 − f 0 (x0 )
x0 .
2 f 0 (x0 )
Questa formula fornisce la soluzione del Problema 3, con raggio incidente di equazione
x = x0 . Si noti che nelle considerazioni precedenti è implicita la condizione f 0 (x0 ) 6= 0.
Infatti la condizione f 0 (x0 ) = 0 corrisponde al caso in cui lo specchio tangente è orizzontale,
per cui il raggio riflesso coincide con il raggio incidente e non ha quindi alcuna interzezione
con l’asse y (a meno che non coincida con quest’ultimo).
Siamo ora in grado di risolvere il problema iniziale, ponendoci nel caso in cui i raggi
incidenti sono tutti paralleli all’asse y. Per far questo basta prendere la formula (6) e
considerare il valore di x0 non fisso ma variabile. Ponendo allora x0 = x si ottiene una
funzione,
2
(7)
yF (x) = f (x) +
1 − f 0 (x)
x,
2 f 0 (x)
che rappresenta il punto F sull’asse y al variare del raggio incidente. Dobbiamo imporre che
questa funzione sia costante (cioè che il punto F resti invariato). Ciò equivale ad imporre
yF0 (x) = 0. Applicando le regole di derivazione si trova che
yF0 =
0
1
02
00
1
+
f
f
−
x
f
.
2
2 f0
Siccome la prima parentesi non può mai annullarsi, la condizione yF0 = 0 è equivalente a
(8)
x f 00 (x) − f 0 (x) = 0
Possiamo allora affermare che: uno specchio fa convergere un fascio di raggi paralleli all’asse
y in un unico punto F sul medesimo asse se e soltanto se il suo profilo è il grafico di una
funzione y = f (x) soddisfacente alla condizione (8).
La condizione (8) è una equazione differenziale, cioè un’equazione che coinvolge non
solo i valori di una funzione ma anche quelli delle sue derivate. Siccome quest’equazione
coinvolge la derivata seconda, come derivata d’ordine massimo, si dice che è un’equazione
differenziale del secondo ordine. Quest’equazione si scrive anche, più sinteticamente,
(9)
x y 00 − y 0 = 0
Siamo allora di fronte al problema finale seguente: determinare le funzioni y = f (x) che
sostituite nella (9) la soddisfano identicamente, cioè per ogni valore ammissibile della variabile indipendente x. Come vedremo subito, l’uso del plurale è giustificato dal fatto che le
soluzioni della (9) sono infinite e dipendono da due costanti arbitrarie.
S. Benenti - Geometria Analitica - Lo specchio parabolico
(4.2.2012) - 21
Con la posizione z = y 0 (per cui y 00 = z 0 ), l’equazione (9) si riduce ad un’equazione del
primo ordine:
x z 0 = z.
(10)
Questa è chiaramente soddisfatta da ogni funzione del tipo
z = k x,
con k costante arbitraria. Ritornando alla y, si può scrivere
y 0 = k x.
Con una semplice integrazione si trova
y=
k 2
x + c,
2
dove c è un’ulteriore costante arbitraria. La soluzione generale dell’equazione differenziale
(9) è quindi
y = a x2 + c
(11)
con (a, c) costanti arbitrarie. Questa si può leggere come equazione di una curva nel piano
(x, y). Si tratta dell’equazione di una parabola, avente come asse l’asse y. Se si sostituisce
la soluzione (11) nella (7), svolti i calcoli, si trova
yF =
1
+ c.
4a
Questo mostra che yF è proprio costante (cioè che F è fisso, a conferma della validità della
soluzione trovata al problema). Questo numero è dunque l’ordinata del fuoco della parabola.
Siamo cosı̀ giunti a questa interessante conclusione: le curve che per riflessione concentrano tutti i raggi paralleli all’asse y in un solo punto di quest’asse sono le parabole di
equazione y = ax2 + c.
y
.
........
...
...
...
...
...
...
...
...
...
....
...
...
...
...
...
...
....
...
...
...
...
...
...
..
..
..
...
...
...
...
...
...
..
.
.
.
.
.
....
...
...
...
...
..
...
...
..
.
.
.
.
...
...
...
...
...
..
..
..
.
.
.
.
.
...
...
...
...
...
.
.
.
...
.
.
.
...
.
...
...
...
...
..
..
..
..
...
.
.
.
.
...
...
...
...
.
.
.
..
.
.
.
..
.
...
...
...
...
...
..
...
...
...
.
.
.
.
....
..
...
...
...
...
...
..
..
..
..
.
.
.
.
...
...
...
...
...
...
...
.
.
.
.
.
...
.
.
.
...
...
.
.
.
.
...
...
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
...
...
...
...
.....
.....
...
.....
....
....
...
...
...
...
...
...
..
..
..
...
...
...
...
...
...
... .....
.. ....
....
....
....
...
...
...
...
... ..
.
.
.
.
.
.
.
.
...
...
...
... ...
... ....
.....
.....
.....
.....
.....
...
...
...
..
...
..
...
....
............
...
...
... ................
...
............................
...
....
...
.
.
.
....
.
.
................. ....
.
.
.
.
.
.
.
.
...
.
.
................ ... ....
.............
.
.
.... ...
.
.
.
.
.
.... ..
.... .....................
.. ........... ....
....
.... ......
.... ...
..
............
.........................................................................................................................................................................................
....
...
..
............... ...
... ............•
..
.
....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..... . .. ......
.
.... ..
..... ... ................... ..... .... ...... ................... .... .........
...............
...............
.. .... .. ... ..
......
... ...
....
......
....... .... .....
.
.
.
1
.
.
.
.
.
.
.
.
.
.
2
.............
.
............. .... ........................
F
......................
4a
...
...
...
..
..
..........................................................................................................................................................................................................................................................................
...
...
....
..
..
..
F
y =
+c
y = ax + c
x
Questo risultato è applicato nella costruzione dei telescopi a riflessione, delle antenne
direzionali (dette appunto antenne paraboliche), dei fari. Le superfici riflettenti sono dei
paraboloidi di rotazione, ottenuti facendo ruotare una parabola intorno al suo asse.
S. Benenti - Geometria Analitica - La parabola
(4.2.2012) - 22
La parabola
Si chiama parabola il luogo dei punti equidistanti da un punto F , detto fuoco, e da
una retta, detta direttrice, non passante per F .
Se denotiamo con P un generico punto del luogo, e con r e d la sua distanza dal fuoco
e dalla direttrice, rispettivamente, allora la parabola è definita dall’equazione
r − d = 0.
La retta perpendicolare alla direttrice e passante per F si chiama asse della parabola. La
parabola interseca il suo asse in un punto V detto vertice.
..
..
...
..
..
...
..
..
...
..
..
...
..
..
..
.
.
..
..
..
...
..
...
..
..
...
.
..
...
..
...
..
..
...
.
..
.
..
...
....
..
....
...
..
....
...
..
....
..
..
....
.
..
....
...
....
...
...
.....
..
...
.....
..
..
.
.....
.
..
.....
..
...
.....
...
..
......
....
..
......
....
.
..
......
.
.
...
......
...
.......
.....
..
........
..
......
.........
.. ..........
........
...........
.............
................................................
............
..
.............
.
..
.
.
.
.
.
.
.
.
.
.
.
..
...........
..
.............
..
.............
.. ........................
.
.
.
.
.
.
.
.
.
.
.
.........
............. ...
.............
..
............
..
.............
.
.
.
.
.
.
..
.
.
.
.
.
.
..
..........
..
.............
.
.
.
.
.
.
.
.
.
.
.
.
.......
.
.
.
.
.
.
.
.
.
.
.
...
asse
F
•
•
V
direttrice
Scegliamo gli assi cartesiani (x, y) in modo che l’asse della parabola coincida con l’asse
y e la direttrice con l’asse x.
y
.
..........
...
..
...
..
...
..
...
...
...
..
...
.
...
..
...
...
...
..
...
..
...
.
.
.
...
..
....
...
...
...
...
..
...
...
...
.
...
..
.
.
...
...
...
....
..
..
...
...
...
...
.. ..............
.
.
.
.
.
.
.
.
.
....
. .
... ...
...
....
.... .
. ... ...
...
....
... ...
... ... ..
...
....
.... . ... ... ... ...
..
....
....
.
.
.
.
.
.
.
.
....
..
...
....
....
..
....
....
..
....
..
.....
.
.
.
.
.
.
.
......
....
..
.
.
.
.......
.
.....
....
.
..
.
.......
.
.
.
.
..
.
.
.........
.
.
.
.
..
.
.
.
.
.
............... .. .................
..
.................
..
...
..
..
....
..
...
..
...
.
..........................................................................................................................................................................................................................................................................
...
..
...
....
..
...
r
F
V
•
•
• P
d
x
Sia p la distanza di F dalla direttrice. Siccome per il generico punto P = (x, y) sulla
parabola si ha
r 2 = (y − p)2 + x2 ,
d = y,
l’equazione della parabola è
y=
p
(y − p)2 + x2 .
S. Benenti - Geometria Analitica - La parabola
(4.2.2012) - 23
Elevando al quadrato si trova successivamente
y 2 = (y − p)2 + x2 ,
y 2 = y 2 + p2 − 2py + x2 ,
2py = x2 + p2 ,
y=
(∗)
1 2 p
x +
2p
2
Questa è l’equazione canonica della parabola relativa alla direttrice e all’asse
(scelti come assi x e asse y), dove, ricordiamolo, p è la distanza del fuoco dalla direttrice.
Cambiamo un po’ le cose: prendiamo come asse x la retta parallela alla direttrice ma
passante per il vertice:
y
.
...........
...
...
...
...
...
..
....
...
...
...
...
...
.
...
...
..
..
...
...
...
...
..
...
..
.
.
.
.
...
.....
...
...
...
...
...
..
...
..
...
...
.
.
.
.
....
...
...
...
......
....
...
. ... ... ....
...
....
.. ..... ...... ..
.
.
.
.
.
.
.
.
....
. ...
... ..
....
....
... ... ..
.... ...
....
... . ... ... ... ...
.
.....
....
......
....
..
....
.
.
.
.
.
.
....
..
...
....
.....
....
..
.....
.
.
.
.
.
......
.
..
.
..
.
.
.
.
.
.
.......
...
.
.
...
.
..
.
.......
.
.
.
..
.
.
.........
.
.
.
.
..
.
.
.
.
............... .. ..................
.
.
.
.
.
.
................................................................................................................... ........... ...........................................................................................................................
..
...
...
..
...
..
...
...
..
.
.
...................................................................................................................................................................................................................................................................
...
...
...
...
...
..
r
F
V
•
• P
d
•
x
In questo caso abbiamo
p
d=y+ ,
2
p 2
+ x2 ,
r2 = y −
2
e l’equazione della parabola diventa
p
y+ =
2
r
Ripetendo i calcoli troviamo quanto segue:
p2
p 2
y2 +
+ py = y −
+ x2 ,
4
2
y−
p 2
+ x2 .
2
y2 +
p2
p2
+ py = y 2 − py +
+ x2 ,
4
4
cioè
(∗∗)
y=
1 2
x
2p
Questa è l’equazione canonica della parabola relativa alla tangente nel vertice e
all’asse (scelti come assi x e asse y).
In realtà, per ottenere quest’equazione, non c’è bisogno di rifare i calcoli. Basta osservare che la (∗∗) è ottenuta dalla (∗) sottraendo il termine positivo p2 , cioè alzando l’asse x
di p2 .
S. Benenti - Geometria Analitica - Le coniche
(4.2.2012) - 24
Le coniche
Le coniche come intersezione di un piano e un cono
Ricordiamo che un cono (nello spazio) è ottenuto facendo ruotare attorno ad una retta
fissa, detta asse del cono, una retta passante per un suo punto V , detto vertice. Le rette
appartenenti al cono vengono dette direttrici. Le due superfici divise dal vertice si dicono
falde.
Intersechiamo un cono con un piano.
A seconda della reciproca posizione del piano e del cono si hanno quatto tipi di coniche:
(I) Iperbole, se il piano non passa per il vertice V e interseca entrambe le falde del cono.
Un’iperbole e quindi divisa in due rami.
(II) Ellisse, se il piano interseca una sola falda, e non è parallelo ad una direttice. In questo
caso la curva intersezione non ha punti all’infinito, è cioè una curva limitata. Caso
particolare è la circonferenza, quando il piano è perpendicolare all’asse del cono.
(III) Parabola, se il piano è parallelo ad una direttrice (e non tangente al cono).
(IV) Conica degenere, se il piano passa per il vertice. Una conica degenere può essere
costituita da una coppia di rette se il piano interseca il cono, da una retta se il
piano è tangente al cono, oppure da un solo punto, il vertice V .
Equazione generale delle coniche.
Si dimostra che le tutte coniche sono rappresentabili da equazioni algebriche di secondo
grado in (x, y) cioè del tipo
(1)
a x2 + b y 2 + c xy + d x + e y + f = 0.
dove (a, b, c, d, e, f ) sono i coefficienti della conica. Dall’analisi di questi coefficienti è
possibile determinare di quale tipo di conica si tratta. Conviene scrivere la (1) nella forma
(2)
a11 x2 + 2 a12 xy + a22 y 2 + 2 a13 x + 2 a23 y + a33 = 0
e considerare la matrice dei coefficienti
a
a11 a12 a13
A = a12 a22 a23 = c2
d
a13 a22 a33
2
c
2
b
e
2
d
2
e
2
f
(si noti che è una matrice simmetrica). Si dimostra infatti che, considerati i determinanti
a11
A = a12
a13
a12
a22
a22
a13 a23 ,
a33 A33
a
= 11
a12
a12 ,
a22 si ha la seguente classificazione:
A = 0 =⇒ coppia di rette (conica degenere)
A · a11 ≤ 0 =⇒ ellisse
A33 > 0
(C)
A · a11 > 0 =⇒ conica non reale
A 6= 0
A
<
0
=⇒
iperbole
33
A33 = 0 =⇒ parabola
S. Benenti - Geometria Analitica - Le coniche
(4.2.2012) - 25
In corrispondenza ad ognuno di questi casi è possibile determinare un nuovo sistema di assi
cartesiani rispetto ai quali l’equazione (2) assume una delle forme canoniche sopra considerate. In particolare, se manca il termine rettangolo, cioè se a12 = 0 e se i coefficienti degli
altri due termini quadratici sono uguali, cioè a11 = a22 , allora la conica è una circonferenza.
Esercizio 1. Si scriva la matrice dei coefficienti per ciascuna delle equazioni canoniche
viste e si verifichi la corrispondenza con la classificazione del quadro (C).
Esempio: la matrice dei coefficienti dell’equazione (1) è (si deve portare 1 a primo
membro)
1
0
0
a2
0
A = 0 b12
0
0 −1
per cui
A= −
1
a2 b2
< 0,
A33 =
1
a2 b2
> 0.
Siccome A a11 = A a12 < 0 la conica è un ellisse.
Esercizio 1. Dire di che tipo è la conica d equazione
3 x2 − y 2 − x y + 2 x − 6 y + 4 = 0.
La matrice dei coefficienti è
per cui
3
A = − 12
1
A = − 36,
A33
− 12
−1
−3
3
= 1
−
2
Siccome A 6= 0 e A33 < 0, la conica è un’iperbole.
1
−3
4
13
− 12 = − .
−1
4
S. Benenti - Geometria Analitica - Eccentricità
(4.2.2012) - 26
Eccentricità
Le coniche hanno un’ulteriore definizione che le accomuna tutte, basata sul concetto
di eccentricità. Prendiamo due rette fra loro perpendicolari, che chiamiamo asse e direttrice. Prendiamo un punto F (fuoco) sull’asse. Fissati questi elementi, consideriamo
un generico punto P del piano e partiamo da P con una retta parallela all’asse fino alla
direttrice: individuiamo un punto D:
..
..
...
..
...
..
..
....
.
.
. ... . ....
.
.
.
.
.
.
.
..
... ... .
.
.
.
..
..
..
..
...
..
..
.
.
..
.
.
..
..
..
.
...
.
..
..
.
...
.
.
..
.
..
.........
..
.............
..
..
............
..
.
.............
.
.
.
.
.
.
.
.
.
.
.
.
.
.
........
.
............. ...
..
.............
..
..
............
..
.............
.
.
..
.
..
.
.
.
.
.
.
.
.
.
.
..
.......
.
.
.
.
.
.
.
.
.
.
.
.
.
..
. ................
.
..
......
.
.
.
.
.
.
.
.
.
.
.
..
.
......
.
.
.
.
.
.
.
.
.
..
.
.
.
.....
.
.
.
.
.
.
..
.
.
.
.
.
.
......
.
.
..
.
.
.
.
.
.
.
.
.
.
..
......
.
.
.
.
.
.
.
.
.
.
.
.
..
......
.
.
.
.
.
.
.
.
.
.
.
..
.......
..
...
..
..
...
..
• D
P
•
•
asse
F
direttrice
Consideriamo le lunghezze |P F | e |P D|. Fissiamo un numero positivo e e cerchiamo il
luogo geometrico determinato dalla condizione
|P F |
=e
|P D|
(†)
La costante e prende il nome di eccentricità.
È chiaro che, per come l’abbiamo prima definita, per e = 1 si ha una parabola. Dimostriamo che
(1) Se e < 1 il luogo è una ellisse.
(2) Se e > 1 il luogo è una iperbole.
Dimostrazione. Ritorniamo alla figura precedente e fissiamo opportunamente gli assi
coordinati (x, y). Poniamo l’asse coincidente con l’asse x e il fuoco F nel punto (c, 0):
y
.
.........
...
..
..
...
..
...
....
...
....
..
...
..
..
...
...
..
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
....
.
...
..
.
...
.
.
...
...
.
.
.
..
...
...
...
...
.
.
..
.
..
.
..
...
.
....
.
...
.
...
.
.
.
...
...
...
..
...
.
..
...
...
.
..
..
..
.
.
.
...
....
.
.
.
...
...
...
...
...
.
..
..
.
.
..........................................................................................................................................................................................................................................................................................................................................
...
...
......
..
.
....
............................................. .............................................................................................................
...
...
...
...
...
.
............................................................................................................................................................
..
..
...
....
..
...
....
...
...
...
...
...
.
.
P = (x, y)
• D
•
r
O
•
c
F
•
x
d
asse
h
direttrice
S. Benenti - Geometria Analitica - Eccentricità
(4.2.2012) - 27
Siano: d la distanza del fuoco dalla direttrice, h la distanza della direttrice dall’origine, per
cui h = c + d. Con queste impostazioni abbiamo:
|P F |2 = (x − c)2 + y 2 ,
|P D|2 = (h − x)2 .
L’equazione (†), elevata al quadrato, diventa equivalente a
(x − c)2 + y 2 = e2 (h − x)2 .
Sviluppando i quadrati si ottiene successivamente
x2 + c2 − 2 c x + y 2 = e2 (h2 + x2 − 2 h x),
(1 − e2 ) x2 + y 2 + 2 x (e2h − c) = e2 h2 − c2 .
Adesso scegliamo c (o h) in modo da annullare il coefficiente di x:
c = h e2 ,
ovvero h =
c
.
e2
L’ultima equazione si riduce a
(1 − e2 ) x2 + y 2 = (1 − e2 )
osservato che
e2 h2 − c2 = e2
Dividendo per (1 − e2 )
c2
e2
c2
− c2 = c2
e4
c2
.
e2
2
1
2 c
−
1
=
(1
−
e
)
.
e2
e2
si ottiene alla fine l’equazione
y2
x2
+ 2
= 1.
2
c
c
2)
(1
−
e
e2
e2
Questa è chiaramente l’equazione canonica o di una ellisse o di una iperbole. Infatti se
poniamo
c2
2
b
=
(1 − e2 ), per e < 1,
2
2
c
e
2
a = 2,
2
e
b2 = c (e2 − 1), per e > 1,
e2
otteniamo le due equazioni canoniche
x2
y2
+
= 1,
a2
b2
dell’ellisse e dell’iperbole rispettivamente.
x2
y2
−
= 1,
a2
b2
S. Benenti - Geometria Analitica - Equazione polare di una conica
(4.2.2012) - 28
Equazione polare di una conica
Ritorniamo alla figura precedente e fissiamo gli assi. Poniamo l’asse coincidente con
l’asse x e il fuoco F nell’origine:
y
.
.........
....
...
...
..
.....
...
...
..
..
...
....
..
...
...
...
...
..... ... ... ... ... ... ... ... .....
.
...
..
..
.
....
.
...
..
....
..
...
...
.
.
...
...
...
...
...
.
.
...
...
.
..
..
..
.
.
.
...
....
.
.
..
.
...
...
...
...
.
.
..
...
.
..
...
...
.
... ...
..
.... .....
...
.
.
....................................................................................................................................................................................................................................................................................................................................
.....
....
..
...
..
....
...
....
...
...
...
...
...
...
..
...
..
....
...
....
...
...
...
...
...
...
...
...
..
..
....
....
...
...
.
.
p = ed •
P = (x, y)
• D
•
r
•
θ
d
F =O
x
asse
direttrice
Denotiamo con r la distanza di P dall’origine O = F e con α la distanza dall’origine
della direttrice. Introduciamo coordinate polari (r, θ). Con queste scelte possiamo scrivere
|P F | = r,
ed esaminare l’equazione (†),
scrivendola nella forma
ovvero
|P D| = d − r cos θ,
r
|P F |
=
=e
|P D|
d − r cos θ
r = e (d − r cos θ),
r (1 + e cos θ) = e d.
Il risultato definitivo è l’equazione polare di una conica
r=
ed
1 + e cos θ
la cui importanza storica è enorme, come vedremo. Osserviamo però subito che, posto
θ = π/2, cioè cos θ = 0, risulta
r = ed.
Questo numero rappresenta il punto di intersezione con l’asse y della conica. Esso viene
chiamato parametro della conica e di solito denotato con p:
p = ed
Di conseguenza, l’equazione polare di una conica si scrive anche
p
(♣)
r=
1 + e cos θ
o, equivalentemente,
1
1 + e cos θ
=
r
p
S. Benenti - Geometria Analitica - Curve
(4.2.2012) - 29
Curve
Una curva sul piano può essere intesa in due modi:
(1) Come curva parametrizzata, quando essa è definita mediante equazioni parametriche.
(2) Come curva non parametrizzata, quando essa è definita come luogo geometrico o insieme di punti.
Abbiamo a disposizione esempi fondamentali che chiariscono questa distinzione.
Le coniche come curve non parametrizzate. Nei capitoli precedenti abbiamo considerato le coniche come curve non parametrizzate, vale a dire come definite da equazioni (di
secondo grado) nelle (x, y).
Le coniche come curve parametrizzate. Facendo intervenire le coordinate polari (r, θ),
legate alle coordinate cartesiane (x, y) dalle equazioni
x = r cos θ,
y = r sin θ,
dall’equazione polare di una conica (♣)
r=
p
1 + e cos θ
deriviamo le sue equazioni parametriche nel parametro (angolo) θ:
p cos θ
,
1 + e cos θ
y = p sin θ .
1 + e cos θ
x=
Consideriamo nel piano cartesiano (x, y) un punto P e il vettore ad esso associato
r = OP.
Supponiamo che il punto P sia mobile nel piano, cioè che esso dipenda da una variabile t,
che chiamiamo parametro. Al variare di t esso assumerà diverse posizioni nel piano. Una
tale situazione si esprime dicendo che il vettore posizione r del punto è una funzione di
t:
(?)
r = r(t).
Siccome r ha componenti (x, y), l’equazione (?) equivale ad un sistema di equazioni parametriche
x = x(t),
(??)
y = y(t),
dove x(t) e y(t) sono funzioni assegnate di t. In questo modo si determina una curva
parametrizzata sul piano.
Il parametro t può essere, a seconda delle situazioni, di varia natura (angolo, lunghezza,
etc.). Può essere p.es. interpretato come tempo. In questo caso l’equazione vettoriale (?),
o le equivalenti equazioni parametriche scalari (??), descrivono un moto del punto P .
S. Benenti - Geometria Analitica - Curve
(4.2.2012) - 30
y
.
.........
....
..
...
..
...
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
•
.
.
.
.
...................
........
.
.
.
.
.
.
.
.
.
... ..............
•
.........
...
•.........
...
........
..
.......
.......
....
.......
...
......
...
....· .........
...
.....·..·..·
....
...
..·..
....
.·
.
·
.
..
.
·
...
..·.·
....
....
.·.·
....
.
·
.
·
.
...
.·
....
.
.
·
·
.
...
....
.·.·
.
·
...
.
•....
.·
.
·
.
·
...
.
...
.·.·
.
...
.
..
·
..·
...
.
·
.
·
....
...
.·.·
.
.
·
...
...
.·.·
.
.
·
...
...
.·.·
.
...
.
·
...
.·
... .·.·.·.·
...
.. ..·..·
...
·
.
..
·
.
.....·
.
•
.
·
.
.
·
...................................................................................................·.................................................................................................................................................................................................................
...
...
...
...
...
...
...
..
...
....
..
...
...
...
...
...
...
...
..
..
•
..
...
..
...
..
...
•
P (t)
r(t)
•
x
O
Supponiamo che il punto P , durante il suo moto, lasci dietro di sé una scia di fumo.
Questa scia, una volta tracciata, è una curva fissa, cioè un insieme di punti fissi (ovvero un
luogo geometrico): si chiama orbita di P ed è una curva non parametrizzata.
Vediamo due esempi semplici ma significativi.
Esempio 1. Consideriamo equazioni parametriche del tipo
x = x0 + vx t,
(†)
y = y0 + vy t,
con (x0 , y0, vx , vy ) costanti assegnate. Se interpretiamo il parametro t come tempo, esse
descrivono un moto rettilineo uniforme del punto P (vedremo più avanti il significato di
queste parole). Qual’è l’orbita di questo moto? Per trovarla occorre eliminare il parametro
t da queste equazioni. Isoliamo t da entrambe. Troviamo, supponendo per ora i numeri vx
e vy entrambi non nulli,
x − x0
t=
,
vx
t = y − y0 .
vy
Di qui segue l’uguaglianza
x − x0
y − y0
=
.
vx
vy
Si tratta di un’equazione lineare in (x, y) che descrive l’orbita cercata: si tratta quindi di
una retta. Allo stesso risultato si giunge nel caso in vx e/o vy siano nulli.
Esempio 2. Consideriamo equazioni parametriche del tipo
x = R cos(ω t),
(‡)
y = R sin(ω t),
con R e ω costanti positive. Se interpretiamo il parametro t come tempo, esse descrivono
un moto circolare uniforme del punto P di raggio R e velocità angolare ω. È facile
determinarne l’orbita: eleviamo al quadrato i membri delle equazioni parametriche (‡):
2
x = R2 cos2 (ω t),
y 2 = R2 sin2 (ω t).
S. Benenti - Geometria Analitica - Curve
(4.2.2012) - 31
Sommiamo m.a.m. e otteniamo l’equazione
x2 + y 2 = R2 .
L’orbita è una circonferenza di raggio R e centro l’origine.
Velocità e accelerazione
Torniamo alla teoria generale, ovverossia alle equazioni parametriche (?) e (??). Per
derivata del vettore r rispetto al parametro t intendiamo il vettore che ha come
componenti le derivate delle funzioni x(t) e y(t):
dx
dr dt
=
.
dt
dy
dt
Si tratta di un vettore ancora funzione di t. Se t è interpretato come tempo, questo vettore
è la velocità istantanea del punto P :
v(t) =
dr
,
dt
di componenti
dx
dt
.
dy
vy (t) =
dt
Possiamo derivare ancora una volta questo vettore. Otteniamo l’accelerazione istantanea
del punto P :
d2 x
a = 2
d2 r x
dv
dt
= 2 =
.
a(t) =
dt
dt
d2 y
ay = 2
dt
vx (t) =
y
.
..........
....
...
..
...
...
·..·...·....·..·.......
..
.··.·.·...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
··.·...
.
.
.
.
.
.
.
.
.
.
.
.
• .......................
.............
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
........... ···..·.·.·....
•
.......... ···.·....
.....
•........ ···.·...
..
........··.·...
...
....·.·..·..·...
..·..·..·...
..
··..·.·..·...
....
·.··...·..·......
.
..·.·
..·.·.·.·.·.·.·
..·.·.·.·
.·.·.·.·
..·.·.·.·.·
.
.
.
.
.....................·.·.·.·
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
·
·
.....·...·
·
·
·
·
·
·
·
·
·
·
.··.·
·
·
·
·
.......·...·.....· ........
..·.·.····...····· ···
....
.·.·.
.
·
....
.
·
.
....
.·.·
....
..
....
.·.·..·
.
.
·
....
....
.·.·
.
.
...
·
....
..··
.
.
·
...
...
•
.·.·
...
.
..
.
·
...
.·.·
.
.
·
...
...
..··
.
..
.
·
...
.·.·
.
...
.
·
....
.·
.
·
...
.
...
.
·
..··
...
.
·
.
...
...
.. ..·..·.·.·
...
... ..·..··
...
... ..··..··
.
•
.
·
.
.
....................................................................................................·..·................................................................................................................................................................................................................
...
...
...
...
...
..
...
...
...
..
...
....
...
...
..
...
...
..
..
...
•
..
...
..
...
...
...
v(t)
a(t)
•
P (t)
r(t)
x
•
O
S. Benenti - Geometria Analitica - Curve
(4.2.2012) - 32
È una convenzione molto usata quella di rappresentare la derivata d/dt con un puntino
sovrapposto. Si può quindi scrivere, più brevemente,
v = ṙ,
a = v̇ = r̈.
Ritorniamo al vettore velocità v(t). Questo vettore ha una proprietà importantissima:
è in ogni punto dell’orbita tangente all’orbita stessa. Se il modulo |v| della velocità è
costante, il moto si dice uniforme.
Ritorniamo ai due esempi precedenti e calcoliamo le velocità e le accelerazioni.
Esempio 1. Derivando rispetto a t le equazioni parametriche (†) troviamo
ẋ = vx ,
ẏ = vy ,
ẍ = 0,
ÿ = 0.
Il moto è chiaramente uniforme. I numeri (vx , vy ) sono le componenti della velocità, e sono
costanti. L’accelerazione è nulla.
Esempio 2. Derivando rispetto a t le equazioni parametriche (‡) troviamo
ẋ = − R ω sin(ω t),
ẏ = Rω cos(ω t),
ẍ = − R ω 2 cos(ω t),
ÿ = − Rω 2 sin(ω t).
Notiamo allora due cose interessanti:
(1) Dalle prime equazioni segue, elevando al quadrato,
ẋ2 + ẏ 2 = R2 ω 2 .
Essendo |v|2 = ẋ2 + ẏ 2 , il moto è uniforme.
(2) Confrontando il secondo gruppo di equazioni, che danno le componenti dell’accelerazione, con le equazioni parametriche del moto (‡) vediamo che
a(t) = − ω 2 r(t).
L’accelerazione è dunque parallela al vettore posizione r(t), ma di segno opposto, quindi
orientata verso l’origine. Si tratta di un’accelerazione centripeta.
Rappresentazione radiale di un moto piano.
Riprendiamo il campo radiale unitario u e osserviamo che le sue componenti sono
u=
cos θ
sin θ
.
Consideriamo il vettore derivata di u rispetto a θ,
τ=
du
=
dθ
− sin θ
cos θ
.
Questo è chiamato versore trasverso. Notiamo infatti che: (1) il suo modulo è 1; (2)
u · τ = 0: il vettore τ è ortogonale a u, (3) τ è orientato secondo il verso di θ crescente.
S. Benenti - Geometria Analitica - Curve
(4.2.2012) - 33
Possiamo procedere ad una seconda derivazione:
− cos θ
dτ
,
=
dθ
− sin θ
ed osservare di conseguenza che
dτ
d2 u
= 2 = − u.
dθ
dt
Ciò detto, il vettore posizione r = OP di un punto mobile può essere scritto come
r = r u.
Siccome si ha
du
du dθ
=
= θ̇ τ,
dt
dθ dt
risulta
v=
dr
= ṙ u + r θ̇ τ
dt
Questa formula mostra che la velocità è decomposta nella somma di due vettori ortogonali
tra loro, detti:
ṙ u
velocità radiale,
r θ̇ τ
velocità trasversa.
Calcoliamo l’accelerazione:
a=
dv
= r̈ u + ṙ u̇ + ṙ θ̇ τ + r θ̈ τ + r θ̇ τ̇.
dt
Ma, come abbiamo visto sopra, u̇ = θ̇ τ e inoltre
τ̇ =
dτ
θ̇ = − θ̇ u,
dθ
per cui
a = r̈ u + 2 ṙ θ̇ τ + r θ̈ τ − r θ̇2 u.
Alla fine abbiamo
(∗)
a = (r̈ − r θ̇2 ) u + (2 ṙ θ̇ + r θ̈) τ
Anche questa formula mostra che l’accelerazione è decomposta nella somma di due vettori
ortogonali tra loro, detti:
(r̈ − r θ̇2 ) u
accelerazione radiale,
(2 ṙ θ̇ + r θ̈) τ
accelerazione trasversa.
Come vedremo, queste formule sull’accelerazione sono di importanza scientifica fondamentale. Per ora ci limitiamo ad osservare che, sorprendentemente, la componente
dell’accelerazione trasversa è la derivata di ’qualcosa’, a meno di un fattore:
(∗∗)
2 ṙ θ̇ + r θ̈ =
1 d 2
(r θ̇)
r dt
S. Benenti - Geometria Analitica - Brahe-Kepler-Newton
(4.2.2012) - 34
Brahe-Kepler-Newton
L’astronomo danese Tycho Brahe (1546-1601) raccolse un’enorme quantità di dati
numerici astronomici sul moto dei pianeti, basati sull’ipotesi dell’eliocentrismo. Il suo assitente Johannes Kepler (astronomo e matematico tedesco, 1571-1630) fu il genio capace
di dimostrare che tutti questi dati soddisfacevano a tre regole fondamentali, oggi chiamate
Leggi di Kepler ed enunciate come segue:
(1) Le orbite dei pianeti sono ellittiche ed il Sole occupa uno dei fuochi.
(2) Le aree descritte dal raggio che va dal Sole ad un pianeta sono proporzionali ai
tempi impegati a descriverle.
(3) I quadrati dei tempi di rivoluzione dei pianeti intorno al Sole sono proporzionali ai
cubi dei semiassi maggiori delle loro orbite.
Un ulteriore gigantesco e geniale passo fu poi compiuto da Isaac Newton (1642-1727),
che dalle tre leggi di Kepler dedusse la legge di gravitazione universale. Vediamo come
si può compiere questo ’passo’, sulla base delle nozioni in nostro possesso.
Conseguenza della seconda legge di Kepler. Si dimostra che la seconda legge
equivale alla condizione
r 2 θ̇ = ca = costante
(♥)
Questa costante si chiama costante delle aree. Il suo valore varia da pianeta a pianeta.
Segue dalla (∗∗) e dalla (∗) che l’accelerazione trasversa si annulla e che quindi l’accelerazione
aP di un pianeta P é sempre radiale,
aP = (r̈ − r θ̇2 ) u
(♠)
Conseguenza della prima legge di Kepler. Scriviamo l’equazione polare di
una conica (♣) nella forma
r (1 + e cos θ) = p.
Nel caso dell’ellisse è e < 1, ma in ogni caso il parametro p è una costante costante. Con
una derivazione rispetto al tempo otteniamo quindi
ṙ (1 + e cos θ) − e r sin θ θ̇ = 0.
Deriviamo ancora:
r̈ (1 + e cos θ) − e ṙ sin θ θ̇
− e ṙ sin θ θ̇ − e r cos θ θ̇2 − e r sin θ θ̈ = 0.
Quindi,
(♦)
r̈ (1 + e cos θ) − 2 e ṙ sin θ θ̇ − e r cos θ θ̇2 − e r sin θ θ̈ = 0.
Adesso osserviamo che derivando la (♥) otteniamo
2 r ṙ θ̇ + r 2 θ̈ = 0,
da cui segue
r θ̈ = − 2 ṙ θ̇.
S. Benenti - Geometria Analitica - Brahe-Kepler-Newton
(4.2.2012) - 35
Questo risultato ci consente di semplificare l’equazione (♦),
r̈ (1 + e cos θ) − e r cos θ θ̇2 = 0,
e quindi di esplicitare r̈:
r̈ =
e r cos θ θ̇2
.
(1 + e cos θ)
Questo risultato ci serve per calcolare l’accelerazione radiale secondo la formula (♠):
r̈ − r θ̇2 =
e r cos θ θ̇2
e r cos θ θ̇2 − r θ̇2 (1 + e cos θ)
r θ̇2
− r θ̇2 =
= −
.
1 + e cos θ
1 + e cos θ
1 + e cos θ
Questo risultato assume un significato semplice se si utilizza ancora una volta la (♣) scritta
nella forma
r
1
= ,
1 + e cos θ
p
nonché la (♥) scritta nella forma
θ̇ =
ca
,
r2
perché allora
−
r θ̇2
r c2
c2 1
= − r a4 = − a 2 .
1 + e cos θ
p r
p r
Abbiamo in conclusione dimostrato che l’accelerazione (puramente radiale) di un pianeta è
del tipo
(♠♠)
aP = −
c2a 1
u
p r2
Come si vede essa è proporzionale all’inverso del quadrato della distanza dal Sole e orientata
verso il Sole. Il coefficiente c2a /p che denotiamo con γ,
γ=
c2a
,
p
è una costante relativa (apparentemente) al pianeta. Di conseguenza, la forza esercitata dal
Sole sul pianeta è
mP c2a 1
γ mP
F SP = mP aP = −
= − 2
2
p
r
r
essendo mP la massa del pianeta.
Conseguenza della terza legge di Kepler. La terza legge è forse la meno
’intelleggibile’ delle tre. Eppure essa ha una conseguenza universale. Per riconoscerlo
occorre sapere che:
(1) l’area di un’ellisse di semiassi (a, b) è data da
(◦)
A = π a b,
(2) se a > b (a semiasse maggiore) allora il parametro p dell’orbita è dato da
(◦◦)
p=
b2
.
a
S. Benenti - Geometria Analitica - Brahe-Kepler-Newton
(4.2.2012) - 36
(3) L’area dell’orbita di un pianeta è legata alla sua costante delle aree e al suo periodo
di rivoluzione dall’uguaglianza
(◦ ◦ ◦)
A=
1
2
ca T,
ovvero ca = 2
A
.
T
Da queste tre formule segue che
γ=
3
c2a
a 4A2
a 4π 2a2 b2
2 a
= 2
=
=
4
π
.
p
b T2
b2
T2
T2
Ma la terza legge di Kepler afferma che il rapporto a3 /T 2 è una costante indipendente
dal pianeta. Il risultato eclatante è dunque il seguente: la costante γ che compare nella
legge di forza Sole-Pianeta
γ mP
F SP = − 2
r
non dipende dal pianeta, ma solo dal Sole. Essa ha quindi un valore universale, almeno per
il sistema solare.
Questo è quanto ci ha detto Newton.
Tycho Brahe
Johannes Kepler
Isaac Newton