Capitolo 5
Sistemi lineari
5.1 Cos’è un sistema lineare
Definizione 5.1.1
Un sistema lineare di due equazioni in due incognite è un’espressione algebrica del tipo:
a1 x b1 y c1
a2 x b2 y c2
, dove a1 , a2 , b1 , b2 , c1 , c2 sono numeri reali e x e y sono le incognite.
Esempio 5.1.1
L’espressione algebrica seguente:
2 x 3 y 12
5 x 7 y 29
è un sistema lineare. In tal caso a1 2, a2 5, b1 3, b2 7, c1 12, c2 29 .
Osservazione 5.1.1
Preciso che ciascuna delle equazioni presenti in un sistema lineare può avere infinite soluzioni. Una
soluzione di un’equazione in due incognite è costituita da una coppia di numeri. Precisamente: il
numero che sostituito a x e quello che sostituito ad y permettono di ottenere il numero che viene
dopo l’uguale. A tal proposito si consideri l’equazione 2 x 3 y 12 presente nel sistema lineare
contenuto nell’esempio precedente. Tale equazione ha come soluzione la coppia 3;2 . Infatti se si
sostituisce 3 ad x , 2 ad y e si eseguono i calcoli del caso si ottiene il numero 12. Si vede facilmente
che si possono trovare infinite coppie come quella indicata procedendo come segue:
3 y 12 2 x (porto il termine in x al II membro)
y
12 2 x
(divido ambo i membri per il numero 3 che moltiplica y)
3
Ora se si attribuisce alla x un valore a caso, per esempio 0, si ottiene y 4 . In tal modo si è trovata
un’altra coppia che costituisce una soluzione dell’equazione. Attribuendo altri valori a x si
ottengono altri valori per y, e quindi ulteriori coppie di numeri costituenti una soluzione
dell’equazione data. Si vede facilmente che le soluzioni dell’equazione sono infinite.
Autore: Siano Roberto (docente di Matematica presso l’I.I.S. Arturo Prever di Pinerolo)
Osservazione 5.1.2
Come vedremo meglio in seguito ognuna delle equazioni presenti nel sistema lineare rappresenta
una retta o linea retta, da ciò segue il fatto che il sistema si dice lineare.
5.2 Cosa significa risolvere un sistema lineare
Risolvere il sistema lineare
a1 x b1 y c1
a2 x b2 y c2
significa trovare la soluzione (o coppia di numeri) comune ad entrambe le equazioni del sistema.
La richiesta secondo cui la soluzione deve essere comune alle due equazioni è implicita nella
presenza della parentesi graffa. In definitiva: anche se ciascuna equazione ha infinite soluzioni, le
due equazioni potrebbero avere anche una sola o nessuna soluzione in comune. Il sistema riportato
nell’esempio 5.1. ha una sola soluzione comune: la coppia 3;2 . È evidente perciò che in un
sistema la x (così come la y) in entrambe le equazioni rappresenta sempre e solo lo stesso numero.
5.3 Come si risolve un sistema lineare
Esistono più metodi per la risoluzione di un sistema lineare. Per la precisione i metodi sono 4:
metodo di sostituzione, metodo del confronto, metodo di riduzione e metodo di Cramer. Inoltre un
sistema lineare può essere indeterminato, nel senso che ha infinite soluzioni, determinato (ha
un’unica soluzione) o impossibile (non ha soluzioni). In seguito vedremo un criterio che ci permette
di prevedere a quale delle suddette tipologie un sistema appartiene vedendo semplicemente i
coefficienti delle equazioni date.
5.4 Metodo di sostituzione
La risoluzione di un sistema col metodo di sostituzione prevede che in una qualunque delle due
equazioni si ricavi una qualunque delle due incognite. Successivamente alla suddetta operazione si
procede sostituendo(da qui l’espressione “metodo di sostituzione”)
nell’altra equazione
l’espressione equivalente all’incognita ricavata. Infine si risolve l’equazione in un’unica incognita
ottenuta e si sostituisce la soluzione ottenuta nell’altra equazione. Mostriamo qui di seguito quanto
detto attraverso alcuni passaggi algebrici:
a1 x b1 y c1
a2 x b2 y c2
Autore: Siano Roberto (docente di Matematica presso l’I.I.S. Arturo Prever di Pinerolo)
b1 y c1 a1 x1
a2 x b2 y c2
c1 a1 x
y
b1
(ricavo l’incognita y nella prima equazione)
a x b y c
2
2
2
c1 a1 x
y b
1
(sostituisco l’espressione equivalente alla y nella seconda equazione)
a x b c1 a1 x c
2
2
2
b1
Esempio 5.4.1
Risolviamo col metodo di sostituzione il sistema introdotto nell’esempio 5.1.1:
2 x 3 y 12
5 x 7 y 29
2 x 12 3 y
5 x 7 y 29
12 3 y
x
2
5 x 7 y 29
12 3 y
x
2
5 12 3 y 7 y 29
2
12 3 y
x
2
60 15 y 7 y 29
2
12 3 y
x
2
60
15
y 14 y 58
2
2
12 3 y
x
2
60 15 y 14 y 58
Autore: Siano Roberto (docente di Matematica presso l’I.I.S. Arturo Prever di Pinerolo)
12 3 y
x
2
15 y 14 y 58 60
12 3 y
x
2
y
2
12 3 y
x
2
y 2
12 3 2
x
2
y 2
x 3
y 2
5.5 Metodo del confronto
La risoluzione di un sistema col metodo di sostituzione prevede che in entrambe le equazioni si
ricavi la stessa incognita (la scelta è arbitraria). Successivamente alla suddetta operazione si procede
uguagliando o mettendo a confronto (da qui l’espressione “metodo del confronto”) le espressioni
che in entrambe le equazioni risultano equivalenti all’incognita ricavata. Quest’ultima equazione
risulta essere in un’unica incognita per cui è possibile procedere alla determinazione della sua
soluzione che viene a sua volta sostituita in una delle due equazioni ottenute ricavando l’incognita
scelta. Mostriamo qui di seguito quanto detto attraverso alcuni passaggi algebrici:
a1 x b1 y c1
a2 x b2 y c2
b1 y c1 a1 x1
b2 y c2 a2 x
c1 a1 x
y b
1
(ricavo l’incognita y in entrambe le equazioni)
c
a
x
2
2
y
b2
c1 a1 x
y
b1
(uguaglio le equazioni ottenute ricavando l’incognita y)
c1 a1 x c2 a2 x
b2
b1
Autore: Siano Roberto (docente di Matematica presso l’I.I.S. Arturo Prever di Pinerolo)
Esempio 5.5.1
Risolviamo col metodo del confronto il sistema introdotto nell’esempio 5.1.1:
2 x 3 y 12
5 x 7 y 29
2 x 12 3 y
5 x 29 7 y
12 3 y
x
2
x 29 7 y
5
12 3 y
x
2
12
3
y
29 7 y
2
5
12 3 y
x
2
512 3 y 229 7 y
10
10
12 3 y
x
2
60 15 y 58 14 y
10
10
12 3 y
x
2
60
15
y 58 14 y
12 3 y
x
2
15 y 14 y 58 60
12 3 y
x
2
y 2
12 3 y
x
2
y 2
Autore: Siano Roberto (docente di Matematica presso l’I.I.S. Arturo Prever di Pinerolo)
12 3 2
x
2
y 2
x 3
y 2
5.6 Metodo di riduzione
La risoluzione di un sistema col metodo di riduzione prevede che si scelga arbitrariamente la stessa
incognita in entrambe le equazioni e si proceda al calcolo del m.c.m. dei coefficienti relativi alla
stessa incognita. Successivamente si divide il m.c.m. per ciascun coefficiente dell’incognita scelta e
si moltiplica il risultato della divisione per ambo i membri dell’equazione corrispondente. Infine si
procede alla sottrazione membro a membro delle equazioni ottenute. Si ottiene un’equazione in
un’unica incognita facilmente risolvibile la cui soluzione va sostituita in una delle due equazioni di
partenza per trovare la soluzione dell’altra incognita.
Mostriamo qui di seguito quanto detto attraverso la risoluzione del sistema riportato nell’esempio
5.1.:
2 x 3 y 12
5 x 7 y 29
52 x 3 y 5 12
25 x 7 y 2 29
10 x 15 y 60
10 x 14 y 58
10 x 15 y 60
y 2
10 x 15 2 60
y 2
10 x 60 30
y 2
10 x 30
y 2
x 3
y 2
Autore: Siano Roberto (docente di Matematica presso l’I.I.S. Arturo Prever di Pinerolo)
5.7 Metodo di Cramer
Per indicare in cosa consiste il metodo di Cramer procediamo in generale a partire dal generico
sistema di due equazioni in due incognite.
Mostriamo qui di seguito quanto detto attraverso la risoluzione del sistema riportato nell’esempio
5.1.:
a1 x b1 y c1
a 2 x b2 y c 2
Procediamo alla risoluzione del suddetto sistema con il metodo del confronto o con il metodo di
sostituzione:
b1 y c1 a1 x1
b2 y c2 a2 x
c1 a1 x
y b
1
y c2 a2 x
b2
c1 a1 x
y b
1
c
a
x
c a2 x
1
1
2
b2
b1
c1 a1 x
y b
1
b2 c1 a1 x b1 c2 a2 x
b1b2
b1b2
c1 a1 x
y b
1
b
c
b
bc ba x
2 a1 x
2 1
1 2 1 2
b1b2
b1b2
Autore: Siano Roberto (docente di Matematica presso l’I.I.S. Arturo Prever di Pinerolo)
c1 a1 x
y
b1
b c b a x b c b a x
1 2
1 2
2 1 2 1
c1 a1 x
y
b1
b a x b a x b c b c
2 1
1 2
2 1
1 2
c1 a1 x
y
b1
b a b a x b c b c
2 1
1 2
2 1
1 2
c1 a1 x
y b
1
x b1c2 b2 c1
b1a2 b2 a1
b c b2 c1
c1 a1 1 2
b
a
b
a
1
2
2
1
y
b1
x b1c2 b2 c1
b1a2 b2 a1
c1 b1a2 b2 a1 a1 b1c2 b2 c1
b1a2 b2 a1
y
b1
b c b2 c1
x 1 2
b1a2 b2 a1
c1b1a2 c1b2 a1 a1b1c2 a1b2 c1
b1a2 b2 a1
y
b1
b c b2 c1
x 1 2
b1a2 b2 a1
c1b1a2 a1b1c2
y b b a b a
1 1 2
2 1
x b1c2 b2 c1
b1a2 b2 a1
Autore: Siano Roberto (docente di Matematica presso l’I.I.S. Arturo Prever di Pinerolo)
b1 c1a2 a1c2
y b b a b a
1 1 2
2 1
x b1c2 b2 c1
b1a2 b2 a1
c1a2 a1c2
y b a b a
1 2
2 1
x b1c2 b2 c1
b1a2 b2 a1
In definitiva abbiamo ottenuto le soluzioni del sistema in funzione dei coefficienti delle incognite e
dei termini noti. Facciamo notare che per ricordare le suddette soluzioni si può ricorrere al seguente
metodo. Si considerino le matrici
a1 , b1
a , b
2 2
a1 , c1
a , c
2 2
c1 , b1
c , b .
2 2
Tali matrici si ottengono come segue: la prima prendendo i coefficienti delle incognite del sistema
nell’ordine indicato, la seconda si ottiene sostituendo nella colonna dei coefficienti della y i termini
noti e la terza si ottiene sostituendo nella colonna dei coefficienti della x i termini noti.
Calcoliamo i rispettivi determinanti:
a1 , b1
a2 , b2
a1 , c1
a2 , c2
c1 , b1
c2 , b2
a1b2 b1a2
a1c2 c1a2 y
c1b2 b1c2 x
Si vede subito che le soluzioni del sistema si possono ottenere come segue:
c1a2 a1c2 y
y b a b a
1 2
2 1
x b1c2 b2 c1 x
b1a2 b2 a1
Autore: Siano Roberto (docente di Matematica presso l’I.I.S. Arturo Prever di Pinerolo)
5.8 Criterio per stabilire se un sistema lineare è determinato, indeterminato o impossibile
Partiamo dalla seguente espressione ottenuta operando sul sistema lineare generico.
c1 a1 x
y
b1
b a b a x b c b c
2 1
1 2
2 1
1 2
Si vede facilmente che la seconda equazione è determinata se
b1a2 b2 a1 0 b1a2 b2 a1
b1 a1
. In tal caso anche il sistema è determinato.
b2 a2
Inoltre la seconda equazione è indeterminata se b1a2 b2 a1 b1c2 b2c1 0
b1 a1 c1
. In tal
b2 a2 c2
caso anche il sistema è indeterminato. Infine la seconda equazione è impossibile se
a
b
c
b1a2 b2 a1 0 b1c2 b2 c1 0 1 1 1 . In tal caso anche il sistema è impossibile.
a2 b2 c2
5.9 I sistemi lineari e la retta
Una retta passante per l’origine degli assi è il luogo geometrico piano costituito dai punti per cui il
rapporto tra l’ordinata e l’ascissa è costante. In altri termini: data una qualsiasi retta passante per
y
l’origine e preso uno qualunque dei suoi punti (diversi dall’origine) P1 x1; y1 , il rapporto 1 fra la
x1
sua ordinata e la sua ascissa dà sempre lo stesso numero m. In generale possiamo affermare che una
y
m costante.
retta passante per l’origine è il luogo dei punti del piano per cui il rapporto
x
Segue che l’equazione di una retta passante per l’origine è del tipo: y mx . Si precisa che il
numero m prende il nome di pendenza o coefficiente angolare della retta di equazione data ed è una
grandezza legata all’angolo che la retta forma con l’asse x.
Autore: Siano Roberto (docente di Matematica presso l’I.I.S. Arturo Prever di Pinerolo)
Esempio 5.9.1
L’espressione y 3 x è l’equazione di una retta passante per l’origine.
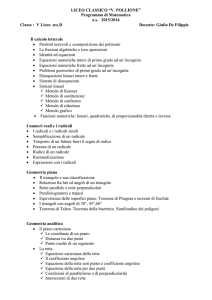
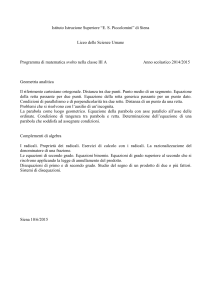
Se volessimo determinare l’equazione di una retta che non passa per l’origine dovremmo procedere,
tenendo conto dell’equazione suddetta, alla traslazione degli assi cartesiani. Come mostrano le
immagini sottostanti se un punto P ha coordinate xP ; yP nel sistema di riferimento xOy avrà
coordinate X P ; YP nel sistema di riferimento XO’Y . In particolare, tra le coordinate dell’uno e
dell’altro sistema esiste il legame indicato dalle seguenti equazioni:
xP x0 X P
y P y0 YP
X P xP x0
YP y P y0
Autore: Siano Roberto (docente di Matematica presso l’I.I.S. Arturo Prever di Pinerolo)
Autore: Siano Roberto (docente di Matematica presso l’I.I.S. Arturo Prever di Pinerolo)
Autore: Siano Roberto (docente di Matematica presso l’I.I.S. Arturo Prever di Pinerolo)
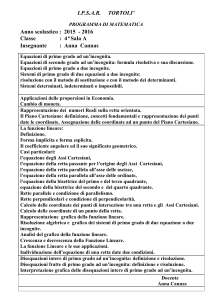
Qui di seguito mostriamo come l’uso delle trasformazioni di cui sopra ci permette di scrivere
l’equazione di una retta che non passa per l’origine. Osserviamo in primis che una retta che non
passa per l’origine incontra l’asse y in un punto di coordinate 0; q . q è precisamente l’ordinata
del punto in cui la retta incontra l’asse y e prende il nome di intercetta.
Si consideri il sistema di riferimento XO’Y il cui asse X coincide con la retta parallela all’asse x
passante per il punto di coordinate 0; q in cui la retta incontra l’asse y e il cui asse Y coincide con
l’asse y la retta in questione ha equazione Y mX . Utilizzando le trasformazioni
X P xP x0
YP y P y0
nel caso in cui x0 0 e y0 q si ottiene l’equazione
y q mx da cui si ottiene l’equazione
y mx q che è l’equazione della generica retta che non passa per l’origine. In particolare
l’equazione della retta passante per l’origine coincide con l’equazione data nel caso in cui q 0 .
Autore: Siano Roberto (docente di Matematica presso l’I.I.S. Arturo Prever di Pinerolo)
L’equazione ottenuta si dice anche equazione della retta nella forma esplicita. Esiste anche la forma
implicita dell’equazione della retta. Si tratta dell’equazione ax by c , dove a, b e c sono numeri
reali che non si annullano tutti contemporaneamente, che prende il nome di equazione della retta
nella forma implicita. L’equazione appena riportata è dello stesso tipo di quelle riportate in un
sistema lineare. Ciò giustifica quanto detto in precedenza. In altri termini: ognuna delle equazioni
presenti nel sistema rappresenta una retta del piano. Si vede facilmente che è possibile passare da
una forma all’altra. Infatti, data y mx q , spostando mx al I membro si ottiene y mx q che è il
caso in cui a m , b 1 e c q . Similmente data ax by c trasportando by al II membro e
a
c
x . Ora sorge spontanea la domanda: cosa
b
b
rappresenta un sistema lineare dal punto di vista geometrico? Rappresenta i punti del piano che le
rette le cui equazioni sono presenti nel sistema hanno in comune. Va da sé che se il sistema è
determinato le rette in questione hanno un solo punto in comune, se è indeterminato hanno tutti i
punti (che sono infiniti) in comune e se è impossibile non hanno alcun punto in comune. Preciso
che se si vuole rappresentare graficamente una retta sul piano cartesiano basta trovare due punti
della stessa e congiungerli. In particolare data l’equazione di una retta nella forma esplicita, per
ottenere le coordinate di un punto qualunque della retta basta dare un valore a piacere alla x e
calcolare il valore che si ottiene per y.
dividendo ambo i membri per a si ottiene y
Autore: Siano Roberto (docente di Matematica presso l’I.I.S. Arturo Prever di Pinerolo)
5.10 Problemi che si risolvono con l’uso dei sistemi lineari
Si consideri il seguente problema: nell’aia del mio vicino ci sono 48 animali, tra polli e conigli,
quanti sono i polli e quanti sono i conigli se in tutto si contano 112 zampe? Vediamo come
possiamo trasformare il problema in un sistema lineare. In primo luogo occorre prendere in
considerazione le incognite del problema. Si tratta del numero dei polli e del numero dei conigli. Se
indico con x il numero dei polli e con y il numero dei conigli posso riscrivere il problema in termini
di x e y. Il testo del problema oltre alle domande finali contiene esattamente due affermazioni che
tradotte diventano le equazioni del sistema. Nel caso in questione il fatto che gli animali siano in
tutto 48 si traduce in termini di x e y come segue: x y 48 . Inoltre, il fatto che il totale delle
zampe sia 112 si esprime così: 2 x 4 y 112 . Faccio notare che se i polli fossero 5 e i conigli
fossero 10 il totale delle loro zampe sarebbe dato dalla somma del numero delle zampe dei polli
2 5 10 e del numero delle zampe dei conigli 4 10 40 . Ora nella fattispecie non ci è noto né il
numero dei polli, né il numero dei conigli, ma sappiamo che i polli sono x e i conigli y, per cui invece di
usare 5 e 10 per determinare il numero delle zampe possiamo usare x e y. In altri termini le zampe dei polli
sono 2x e quelle dei conigli sono 4 y , ma la loro somma è pari a 112. Le suddette affermazioni
valgono contemporaneamente per cui siamo autorizzati a porre le equazioni trovate in parentesi
graffa. Abbiamo ottenuto il seguente sistema:
x y 48
2 x 5 y 112
che risolto con uno dei metodi indicati dà x = 40 e y = 8.
Autore: Siano Roberto (docente di Matematica presso l’I.I.S. Arturo Prever di Pinerolo)