2
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
Distanze e variazioni:
gli spazi metrici
Spazi metrici e spazi dotati di norma
Continuità e convergenza
Insiemi chiusi e aperti
L'assioma di continuità nella teoria dell'utilità
Differenziazione
Derivate generalizzate
Il teorema della funzione implicita e la statica comparata
Applicazioni della statica comparata: i modelli macroeconomici elementari
Introduzione
Nel linguaggio comune sono molto frequenti frasi come “Questo oggetto è vicino a
un altro oggetto”, oppure “Questo oggetto si avvicina sempre più all’altro”. In matematica, definire rigorosamente anche concetti così comuni e intuitivi si rivela molto
produttivo.
Questo capitolo si divide in due parti. La prima, costituita dai paragrafi da 2.1 a
2.4, privilegia, dei due concetti menzionati nel titolo del capitolo, quello di distanza.
Il paragrafo 2.1 introduce i concetti di distanza, norma, distanza dedotta da una norma e pertanto la nozione di spazio metrico. Il paragrafo 2.2 definisce i concetti di
continuità e di convergenza. Così come il paragrafo 2.1 precisava i concetti di “vicino e lontano da…”, quest’ultimo paragrafo definisce rigorosamente il concetto di
“sempre più vicino a…”. Il paragrafo 2.3 è dedicato a uno dei concetti più importanti, quello di insieme aperto (e il corrispondente concetto di insieme chiuso) e alle
proprietà di questi insiemi. Il paragrafo 2.4 contiene invece una prima applicazione
economica, dove si mostra come il cosiddetto assioma di continuità nella teoria delle
preferenze permette di dimostrare la continuità della funzione di utilità.
I restanti paragrafi sono invece concentrati sulla nozione di variazione. Dato che
la distanza tra due punti (dedotta da una norma) non è altro che la norma della differenza tra i due punti, esiste una relazione tra le nozioni di variazione o di differenza e
il concetto di distanza dedotta da una norma, il che spiega la compresenza in questo
cap2.pmd
55
15/02/2004, 11.48
56
Distanze e variazioni: gli spazi metrici
capitolo di questi due argomenti. Il principale problema che affronteremo consisterà
nella possibilità di approssimare le variazioni di una data funzione mediante le variazioni di una appropriata funzione lineare. Come vedremo, questo problema è sotteso
alle diverse tecniche di differenziazione o di derivazione. Il paragrafo 2.5 è una rassegna dei concetti di derivata e derivata parziale di una funzione reale di variabili
reali. Il paragrafo 2.6 introduce i concetti di derivata direzionale, di Gateaux e di
Fréchet per lo stesso tipo di funzioni ed estende i precedenti concetti alle funzioni a
valore vettoriale.
Il paragrafo 2.7 presenta il teorema della funzione implicita e introduce al suo
impiego nella statica comparata. Questa tecnica viene poi esemplificata nel paragrafo 2.8, con l’analisi di due modelli macroeconomici elementari, cioè il modello
IS-LM e un modello “classico”.
L’appendice C svolge invece il tema della differenziazione in spazi di funzioni,
estendendo ai funzionali i concetti introdotti nei paragrafi 2.5 e 2.6. Benché dunque
l’appendice non costituisca altro che una prosecuzione della trattazione contenuta
nei due paragrafi citati, si è ritenuto preferibile separare dal testo principale del capitolo la presentazione di un argomento relativamente astratto e che risulterà utile soprattutto ai lettori interessati alla seconda parte del capitolo 5 e al capitolo 7.
2.1 Spazi metrici e spazi dotati di norma
La seguente definizione esplicita le proprietà che si associano alla nozione intuitiva
di distanza.
Definizione 2.1.1
Dato un insieme S, una distanza è una funzione con valore reale ρ(.): S × S → R
dalle seguenti proprietà. Per qualsiasi x, y, z ∈ S
•
•
•
•
ρ( x, y ) ≥ 0
ρ( x, y ) = 0 ⇔ x = y
ρ( x, y ) = ρ( y, x) (simmetria)
ρ( x, z ) ≤ ρ( x, y ) + ρ( y, z ) (diseguaglianza triangolare)
■
Una volta che un’appropriata funzione di distanza ρ(x, y) sia definita su un certo
insieme, allora si dice che S è uno spazio metrico (dotato della distanza ρ(.)).
Esercizio 2.1
Provate che la seguente funzione è una funzione di distanza
1 ⇔
ρ( x, y ) =
0 ⇔
cap2.pmd
56
x≠ y
x= y
■
15/02/2004, 11.48
2.1 Spazi metrici e spazi dotati di norma
57
Definizione 2.1.2
Dato uno spazio metrico S dotato della distanza ρ(.), un intorno aperto di un
punto x ∈ S con raggio ε è l’insieme
N ( x, ε ) = { y ∈ S : ρ( x, y ) < ε}
Se il segno della diseguaglianza è reso debole, si dice che l’intorno è chiuso.
■
Il concetto di intorno richiama, geometricamente, quello di una sfera: l’insieme dei
punti che hanno una distanza non superiore a un dato valore ε (il raggio) rispetto a un
dato punto x ∈ S (il centro della sfera). Tuttavia vedremo che, a seconda di come si
definisce la distanza, un intorno “sferico” può essere molto diverso da una sfera
come la intendiamo abitualmente.
Fino a questo punto, non abbiamo imposto alcun requisito per quanto riguarda le
caratteristiche di S. Supponiamo ora che S sia uno spazio vettoriale. In questo caso
possiamo definire la seguente nozione.
Definizione 2.1.3
Dato uno spazio vettoriale reale V, una norma è una funzione con valore reale
||(.)||: V → R dalle seguenti proprietà.
Per ogni x, y ∈ V e α ∈ R
•
•
•
•
x ≥0
x = 0 se e solo se x = 0V
αx = α ⋅ x
x+ y ≤ x + y
Data una norma ||(.)||: V → R, V è detto uno spazio vettoriale dotato di norma. ■
Si noti, che se V non fosse uno spazio vettoriale, le espressioni ||αx|| e ||x + y|| che
compaiono nella definizione non avrebbero senso, perché non sarebbero definite le
operazioni αx e x + y. I seguenti sono esempi di norme.
Consideriamo innanzitutto lo spazio vettoriale S = Rn. Avremo quindi:
a) Norma euclidea (o L2), x ≡
n
∑ xi2
i =1
n
b) Norma L1, x ≡ ∑ xi
i =1
cap2.pmd
57
15/02/2004, 11.48
58
Distanze e variazioni: gli spazi metrici
c) Norma L2, x ≡ max xi
1≤i ≤ n
Esercizio 2.2
Controllate che le proprietà, indicate nella definizione 2.1.3, siano verificate nel caso
delle norme:
n
a) Norma L1, x ≡ ∑ xi
i =1
b) Norma L2, x ≡ max xi
■
1≤i ≤ n
Esercizio 2.3
Controllate che le proprietà, indicate nella definizione 2.1.3, siano verificate nel caso
■
della norma euclidea.
Consideriamo ora l’insieme C[a,b] delle funzioni continue il cui dominio sia un dato
intervallo chiuso [a, b]. Avremo dunque
d) Norma uniforme g (.) = max g (t )
t ∈[ a ,b ]
Una norma analoga si può definire per l’insieme S composto dalle sequenze infinite
e limitate di numeri reali a = {a0, a1, ..., ak, ...}
a = max a
k
C[1a ,b]
Infine, considerando l’insieme
composto dalle funzioni continue e dotate di
derivata prima continua con dominio [a, b], si può definire:
e)
g (.) = max g (t ) + max g (t )
t ∈[ a ,b ]
t ∈[ a ,b ]
dove g (t ) è la derivata prima di g(t). Che chiameremo norma uniforme estesa1.
1
Le due norme, uniforme e uniforme estesa, possono essere riformulate ponendo ‘sup’ (con il
che si intende il limite superiore) al posto di ‘max’: in questo modo le due norme possono applicarsi ad insiemi di funzioni o di sequenze che non hanno un massimo, ma che sono superiormente
limitate.
cap2.pmd
58
15/02/2004, 11.48
2.1 Spazi metrici e spazi dotati di norma
59
Esercizio 2.4
Considerate le due funzioni
f 1 (t ) = 4t + 5
f 2 (t ) = t + 4
definite nell’intervallo chiuso [–10,5]. Calcolatene la distanza utilizzando prima la
■
norma uniforme e poi la norma uniforme estesa.
Stabiliamo ora una relazione tra norma e funzione di distanza.
Definizione 2.1.4
Dato uno spazio vettoriale V dotato della norma ||(.)||: V → R, la funzione ρ(.,.):
V × V → R definita nel modo seguente
ρ( x, y ) ≡ x − y
■
si dice distanza indotta dalla norma.
Che ρ(x, y) = ||x – y|| sia effettivamente una funzione di distanza si può verificare
facilmente. Dunque, per ognuna delle norme citate prima è possibile definire una
distanza. Ad esempio, le distanze indotte dalle norme a), b) e c) sono rispettivamente:
a) (distanza euclidea) ρ(x, y ) = (x − y )' (x − y )
n
b) ρ(x, y ) = ∑ xi − yi
i =1
c) ρ(x, y ) = max xi − yi
1≤i ≤ n
Mentre dalle norme uniforme e uniforme estesa otterremo rispettivamente le distanze
ρ( g (.), f (.)) = max g (t ) − f (t )
t ∈[ a ,b ]
ρ( g (.), f (.)) = max g (t ) − f (t ) + max g (t ) − f (t )
t ∈[ a ,b ]
t ∈[ a ,b ]
per ogni g(.), f(.) ∈ S[a,b].
cap2.pmd
59
15/02/2004, 11.48
60
Distanze e variazioni: gli spazi metrici
La distanza che più spesso utilizzeremo in questo libro, quando lo spazio metrico sia
Rn sarà la distanza euclidea. È il caso di notare che se n = 1, la norma euclidea ||x|| si
riduce al valore assoluto di x, indicato con |x|.
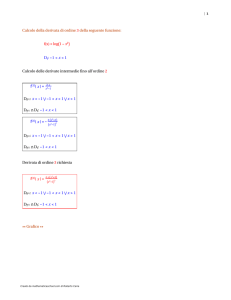
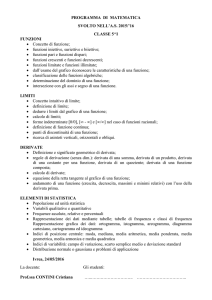
Come ultima osservazione sulle distanze L e L1, può essere istruttivo notare che,
a seconda della funzione di distanza che utilizziamo, un intorno che abbia, ad esempio, il centro nell’origine e raggio unitario, cambierà forma (figura 2.1).
2.2 Continuità e convergenza
La nozione di continuità di una funzione è ben nota a partire dai corsi elementari di
analisi e è per questo motivo che fino a ora abbiamo fatto più volte riferimento
all’insieme delle funzioni continue C[a,b] e a quello delle funzioni con derivata
prima continua, C1[a ,b] . Sulla base della nozione di spazio metrico, siamo ora in
grado di fornire una definizione di questo concetto, così come di quello di convergenza.
Definizione 2.2.1
Data una funzione reale di una sola variabile reale, f(.): D ⊆ R → R diciamo che
f(.) è continua in un punto x ∈ R se:
x ∈ D; lim f ( x) = lim f ( x) = f ( x )
x→ x+
x→ x−
cioè per ogni δ > 0 esiste un ε > 0 tale che:
x − x < ε ⇒ f ( x) − f ( x ) < δ
■
Il concetto di continuità si può facilmente generalizzare a funzioni il cui dominio e
codominio siano contenuti in spazi metrici diversi da R.
Figura 2.1
cap2.pmd
60
15/02/2004, 11.48
2.2 Continuità e convergenza
61
Definizione 2.2.2
Data una generica funzione M(.): U → V dove U, V sono spazi metrici dotati rispettivamente delle funzioni di distanza ρU, ρV, consideriamo x ∈U . M(.)
è continua in x se per qualsiasi δ > 0 esiste un ε > 0 tale che ρU ( x, x ) < ε ⇒ ρV(M(x),
M ( x )) < δ.
■
Una classe di funzioni più ampia rispetto alle funzioni continue è quella delle funzioni continue a tratti.
Definizione 2.2.3
Una funzione f(t): [a, b] → R è continua a tratti in [a, b] se esiste un numero
finito di punti x1, x2, ..., xk, ∈ [a, b] tali che:
lim f ( x) ≠ lim f ( x) (con entrambi i limiti finiti)
x→ xi +
x→ xi −
e
lim f ( x) = f ( xi ) oppure lim f ( x) = f ( xi )
x→ xi +
x→ xi −
i = 1, 2,..., k
■
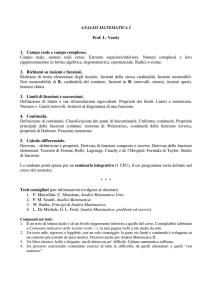
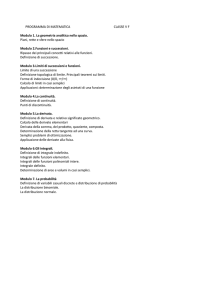
In altri termini, una funzione è continua a tratti se, in un numero finito di punti è
definita, ma il limite destro e sinistro (entrambi finiti) differiscono in tali punti e uno
di essi coincide con il valore della funzione nel punto. Il grafico riportato nella figura
2.2 ne fornisce un esempio.
Figura 2.2
cap2.pmd
61
15/02/2004, 11.48
62
Distanze e variazioni: gli spazi metrici
Passiamo ora al concetto di convergenza. La proprietà di convergenza si riferisce a
una sequenza di punti in uno spazio metrico.
Definizione 2.2.4
Si dice che una sequenza {xn} in uno spazio metrico V converge a un punto
x ∈V se ogni intorno di x , N ( x , ε) contiene tutti gli elementi della sequenza a
■
partire da un certo xnε in avanti.
Introduciamo ora una distinzione nell’ambito della nozione di convergenza, che si
applica a spazi i cui elementi sono funzioni.
Sia S uno spazio metrico i cui elementi sono funzioni, dotato della funzione di
distanza ρS(.,.). Il dominio di tali funzioni è D e il codominio Y. Sul codominio è
definita una distanza ρY(.,.).
Definizione 2.2.5
Data una sequenza {f n } in S e una funzione f (.) ∈ S , se per ogni ε > 0 e ogni
x ∈ D esiste un N tale che n ≥ N ⇒ ρY ( f n ( x), f ( x)) ≤ ε, allora si dice che {f n }
converge in modo puntuale a f rispetto alla distanza ρY(.,.).
Se invece, per ogni ε > 0 esiste un N tale che n ≥ N ⇒ ρY ( f n ( x), f ( x)) ≤ ε, e
tale N è indipendente dallo specifico valore x ∈ D nel quale le funzioni sono
valutate, allora si dice che {f n } converge uniformemente a f rispetto alla di■
stanza ρY(.,.).
Esercizio 2.5
Considerate una sequenza di funzioni appartenente all’insieme C[a,b], sul quale è
definita la norma uniforme:
f (.) U = max f ( x)
x∈[ a ,b ]
Mostrate che se tale sequenza converge a una funzione f in base a questa norma, allo■
ra la sequenza converge uniformemente rispetto alla norma euclidea ||f(.)|| = |f(x)|.
2.3 Insiemi chiusi e aperti
Le idee di “chiuso” e “aperto” riferite a insiemi sono tra le più importanti in matematica e nelle applicazioni economiche.
cap2.pmd
62
15/02/2004, 11.48
2.3 Insiemi chiusi e aperti
63
Definizione 2.3.1
Dato uno spazio metrico S, e un sottoinsieme A ⊆ S.
•
•
•
•
•
•
un punto x ∈ S tale che ogni intorno aperto di x contenga infiniti punti di A si
dice punto di accumulazione di A.
se esiste un intorno del punto x ∈ A che non contenga altri punti di A oltre a
x stesso, quest’ultimo si chiama punto isolato.
l’unione di A e dei suoi punti di accumulazione si chiama chiusura di A (indicata come cl(A))
se esiste un intorno, con centro in x ∈ A, interamente contenuto in A, x è un
punto interno di A.
l’interno di A (Int(A)) è l’insieme dei punti interni di A.
l’insieme φ(A) ≡ {x ∈ S : x ∈ cl(A), x ∉ Int(A)} si chiama frontiera di A.
■
Notate che i punti di accumulazione di A non devono necessariamente fare parte di
A; quindi, per definizione è vero che A ⊆ cl(A), ma il contrario non è necessariamente vero.
Procediamo ora a definire i concetti di insieme chiuso o aperto.
Definizione 2.3.2
Un sottoinsieme A di uno spazio metrico S è aperto se x ∈ A ⇒ x ∉ Int(A), cioè
se tutti i suoi punti sono interni.
■
Un sottoinsieme A di uno spazio metrico S è chiuso se A = cl(A).
I tre seguenti risultati provano alcune proprietà fondamentali degli insiemi aperti o
chiusi.
Proposizione 2.3.1
Se A è chiuso, il complemento di A, cioè A ≡ { x ∈ S , x ∉ A} è aperto.
■
Prova: considerate un qualsiasi punto y ∈ A; dato che A è chiuso, esso contiene tutti i
propri punti di accumulazione, e dunque y non è un punto di accumulazione di A. Questo
implica che esiste almeno un intorno con il centro in y il quale non contiene punti di A,
cioè del tutto contenuto in A. Ma allora, qualsiasi y appartenente ad A appartiene all’interno di A, il che significa che A è aperto.
Proposizione 2.3.2
L’intersezione di un numero arbitrario di insiemi chiusi è un insieme chiuso.
■
L’unione di un numero finito di insiemi chiusi è un insieme chiuso.
cap2.pmd
63
15/02/2004, 11.48
64
Distanze e variazioni: gli spazi metrici
Prova: considerate una collezione infinita di insiemi chiusi: A1, A2, ..., Ak, ... e la loro
intersezione
A = ∩ Ak
k
Se x ∈ cl(A), allora in qualsiasi intorno con centro in x sono allora contenuti infiniti
punti di A (che sono a loro volta infiniti punti appartenenti a ciascuno degli insiemi della
collezione A1, A2, ..., Ak, ...). Perciò se x ∈ cl(A), x è un punto di accumulazione di
ciascuno degli insiemi della collezione. Ma, essendo questi ultimi, per ipotesi, insiemi
chiusi è anche vero che x, appartiene a ciascuno di essi e dunque
x ∈∩ Ak = A
k
Quindi abbiamo provato che x ∈ cl(A) ⇒ x ∈ A, cioè A è chiuso.
Considerate una collezione finita di insiemi chiusi A1, A2, ..., An e la loro unione
n
B = ∪ Ak
k =1
Considerate qualsiasi x ∉ B. Dato che gli insiemi A1, A2, ..., An sono chiusi, x non può
essere punto di accumulazione di nessuno di essi. Quindi, per ogni insieme della collezione A1, A2, ..., An, qualsiasi intorno con centro in x contiene al più un numero finito di
punti appartenenti a quell’insieme e, di conseguenza, non più di un numero finito di
punti di B. Ma allora, se x ∉ B, x non è un punto di accumulazione di B. Un altro modo
di dire la stessa cosa è che se x ∈ cl(B), allora x ∈ B, che significa che B è chiuso.
Proposizione 2.3.3
L’unione di un numero arbitrario di insiemi aperti è un insieme aperto.
■
L’intersezione di un numero finito di insiemi aperti è un insieme aperto.
Prova: considerate una collezione infinita di insiemi aperti: A1, A2, ..., Ak, ... e la loro
unione
A = ∪ Ak
k
A, il complemento di A, è composto di punti che non appartengono a nessuno degli
insiemi A1, A2, ..., Ak, .... In altri termini
A = ∩ Ak
k
Dato che gli insiemi A1, A2, ..., Ak, ..., sono aperti, i loro complementi sono chiusi (proposizione 3.1) e la loro intersezione
A = ∩ Ak è chiusa (proposizione 2.3.2)
k
Ma se A è chiuso, il suo complemento A è aperto.
cap2.pmd
64
15/02/2004, 11.48
2.3 Insiemi chiusi e aperti
65
Considerate ora una collezione finita di insiemi aperti A1, A2, ..., An e la loro intersezione
n
B = ∩ Ak
k =1
Se un certo x non appartiene a B, allora appartiene al complemento di almeno uno degli
insiemi A1, A2, ..., An; quindi l’insieme degli x che non appartengono a B è l’unione degli
x che fanno parte dei complementi di A1, A2, ..., An, ovvero
n
B = ∪ Ak
k =1
Ma allora B è l’unione di un numero finito di insiemi chiusi, e è chiuso a sua volta. Di
conseguenza, il complemento di B (cioè B) è aperto.
Nelle due proposizioni successive si stabiliscono relazioni tra le proprietà di apertura
e chiusura di insiemi e le proprietà di convergenza e di continuità di sequenze e
funzioni a tali insiemi associate.
La prima di esse definisce una condizione necessaria e sufficiente perché un
insieme sia chiuso.
Proposizione 2.3.4
S è un insieme chiuso se e solo se è vero che, quando una sequenza {xn} ∈ S
■
converge a un punto x , allora x ∈ S .
Prova: supponiamo in primo luogo che, se x è il punto di convergenza di una sequenza
interamente contenuta in S, allora x appartiene a S. Sarà allora sufficiente mostrare che
tutti i punti di accumulazione di S sono punti di convergenza di una sequenza contenuta
in S, per provare che, nell’ipotesi citata, tutti i punti di accumulazione di S appartengono
a S, il che corrisponde alla definizione di un insieme chiuso.
Consideriamo allora un punto di accumulazione di S, che chiamiamo x . Ogni intorno di
x contiene infiniti elementi di S. Possiamo allora costruire una sequenza convergente a
x nel modo seguente: per n = 1, 2, ... selezioniamo un punto di S, che chiamiamo xn, tale
che ρ( xn , x ) = 1/n. La sequenza {xn} ha dunque la proprietà che n ≥ nε implica
ρ( xn , x ) ≤ ε, dove nε è l’intero immediatamente superiore a 1/ ε, con ε positivo e arbitrariamente prossimo a 0. Quindi la sequenza {xn} converge a x .
Ora supponiamo che S sia chiuso e consideriamo una sequenza {xn} che converge a un
punto x . Pertanto, per ogni ε > 0, esiste un nε tale che n ≥ nε implica ρ( xn , x ) ≤ ε. Ciò
vuol dire che ogni intorno di x contiene infiniti punti di S, quelli appartenenti alla sequenza {xn}. Ma allora x è un punto di accumulazione di S e appartiene a S, dato che
quest’ultimo è chiuso.
Introduciamo la successiva proposizione con una definizione.
cap2.pmd
65
15/02/2004, 11.48
66
Distanze e variazioni: gli spazi metrici
Definizione 2.3.3
Data una funzione f(.): U → V, per ogni sottoinsieme A ⊆ V, l’immagine inversa
di A è l’insieme:
f −1 ( A) ≡ { x ∈U : f ( x) ∈ A}
■
La proposizione seguente caratterizza la funzioni continue mediante le proprietà delle loro immagini inverse.
Proposizione 2.3.5
Data una funzione f(.): U → V dove U, V sono spazi metrici dotati rispettivamente delle funzioni di distanza ρU, ρV, f(.) è continua se e solo se per ogni A ⊆ V
■
aperto, allora anche f–1(A) è aperto.
Prova: supponete in primo luogo che f(.) sia continua. Considerate un certo A ⊆ V e
supponete che x ∈ f −1 ( A); di conseguenza, y = f ( x ) ∈ A. Se A è aperto, allora esiste
un δ > 0 tale che ρV ( y, y ) < δ implica y ∈ A. D’altro canto, dato che f(.) è continua,
esiste un ε tale che ρU ( x, x ) < ε implica ρV ( f ( x), y ) < δ. Ciò significa che esiste un
intorno di x di raggio ε che è interamente contenuto in f–1(A). Dunque, se A è aperto,
x ∈ f −1 ( A) implica che x sia un punto interno di f–1(A), cioè f–1(A) è aperto.
Supponete ora che se A è aperto, anche f–1(A) sia necessariamente un insieme aperto.
Consideriamo un x ∈U e definiamo A ≡ { y : ρV ( y, f ( x )) < δ} . Dato che A è aperto,
allora esiste un ε tale che ρU ( x, x ) < ε implica x ∈ f −1 ( A). Ma allora ρU ( x, x ) < ε
implica ρV ( f ( x), f ( x )) < δ per qualsiasi δ e un appropriato ε, il che corrisponde alla
definizione di continuità.
Il seguente esercizio è un’applicazione della proposizione 2.3.4. La proposizione
2.3.5 viene utilizzata invece nel paragrafo 2.4.
Esercizio 2.6
Dato uno spazio metrico S, dotato della funzione di distanza ρ(.,.) dimostrate, servendovi delle proposizioni 2.3.1 e 2.3.4, che l’intorno N(x*, ε) = {x ∈ S: ρ(x, x*) ≤ ε}
è un insieme chiuso e che l’intorno L(x*, ε) = {x ∈ S: ρ(x, x*) < ε} è un insieme
■
aperto.
2.4 L’assioma di continuità nella teoria dell’utilità
La teoria microeconomica del consumatore si basa sulla nozione di preferenza. Più
formalmente, dato un insieme U (per il consumatore, l’insieme dei panieri), si ipotizza
esista una relazione P, definita su U × U, detta relazione di preferenza, che si indica
come segue: x ≥p y (dove x, y ∈ U) e che si esprime verbalmente con la frase “x è
cap2.pmd
66
15/02/2004, 11.48
2.4 L'assioma di continuità nella teoria dell'utilità
67
preferito o indifferente a y”. Ogni consumatore è quindi caratterizzato da una relazione di preferenza (i “gusti” del consumatore). Dato un ordinamento di preferenza
P, diciamo che u(.): U → R è una funzione di utilità se, per ogni x, y ∈ U, gode della
seguente proprietà di “rappresentare” l’ordinamento di preferenza:
u ( x) ≥ u ( y ) ⇔ x ≥ P y
In sostanza, una funzione di utilità non è altro che un metodo per attribuire ai diversi
panieri un “punteggio”, in modo tale ai panieri preferiti sia attribuito un punteggio
maggiore di quello associato ai panieri meno graditi al consumatore2.
Un importante risultato, nella storia della teoria del consumatore è stato quello di
chiarire sotto quali condizioni è effettivamente possibile definire un “punteggio” di
questo genere e rappresentare le preferenze individuali mediante una funzione di
utilità continua. Tali condizioni (note come assiomi sulle preferenze) sono le seguenti:
1) per ogni x, y ∈ U, x ≥p y, oppure x ≥p x, oppure entrambe le affermazioni sono
vere (assioma di completezza);
2) per ogni x ∈ U, x ≥p x (assioma di riflessività);
3) per ogni x, y, z ∈ U, se x ≥p y e x ≥p z, allora x ≥p z (assioma di transitività);
4) per ogni y ∈ U, l’insieme S(y): { x ∈ U : x ≥p y} è chiuso (assioma di continuità).
Mentre i primi due assiomi si limitano in sostanza a postulare che la relazione di
preferenza sia definita su tutti i panieri e che ciascun paniere sia confrontabile con se
stesso, e il terzo introduce una requisito di coerenza nel sistema delle preferenze, il
quarto assioma ha un contenuto meno immediato. Esso svolge due funzioni: da un
lato, esso serve a dimostrare che, per un ordinamento di preferenze che rispetti appunto i tre assiomi, esiste una funzione di utilità che rappresenta tali preferenze;
dall’altro, serve a dimostrare che tale funzione è continua (da cui il nome di assioma
di continuità). In questo paragrafo esamineremo questo secondo aspetto. Per chi fosse invece interessato alla dimostrazione dell’esistenza di una funzione di utilità, rinviamo a Mas-Colell et al. (1995).
Ci proponiamo cioè di dimostrare la seguente proposizione.
Proposizione 2.4.1
Dato un ordinamento di preferenza che soddisfa gli assiomi 1., 2., 3, 4. La fun■
zione di utilità che lo rappresenta è continua.
2 Si noti che, data una funzione T(.): R → R monotona non decrescente, allora W(.): R → R ≡
T(u(.)) costituisce anch’essa una funzione di utilità. Infatti: W(x) ≥ W(y) ⇔ T(u(x)) ≥ T(u(y)) ⇔
u(x) ≥ u(y) ⇔ x ≥p y.
cap2.pmd
67
15/02/2004, 11.48
68
Distanze e variazioni: gli spazi metrici
Prova: consideriamo un certo paniere x* e l’utilità a esso associata, u(x*). Definiamo
A = {α ∈ R: α < u(x*)}, ovvero A = (–∞, u(x*)), un intervallo aperto. L’immagine
inversa di A è pertanto u–1(A) = {x ∈ U: u(x) < u(x*)}. Ma u–1(A) si può definire in
questo caso anche nel modo seguente u–1(A) = {x ∈ U: x ∉ S (x*)}, ossia come il complemento di S(x*): { x ∈ U : x ≥p x*}. Infatti, per la definizione di funzione di utilità u(x)
≥ u(x*) ⇒ x ∈ S(x*), per cui u(x) < u(x*) ⇒ x ∉ S(x*). Ma dato che per l’ipotesi di
continuità S(x*) è chiuso, allora il suo complemento, ovvero u–1(A) è un insieme aperto.
Dunque il fatto che A sia aperto comporta che u–1(A) sia aperto, e ciò implica, per la
proposizione 2.3.5, che u(.) sia continua.
2.5 Differenziazione
2.5.1 Derivate e differenziali di una funzione di una sola variabile:
una breve rassegna
In questo e nel successivo paragrafo esamineremo successive generalizzazioni della
nozione di derivata. Per questo cominciamo con una presentazione dei concetti di
derivata e di differenziale nel caso più semplice, ponendo l’accento sulle caratteristiche esso ha in comune con altri casi più complessi e generali. Non dedicheremo
invece spazio alle tecniche di derivazione, cioè al calcolo delle derivate di una funzione, rinviando il lettore a testi di base di matematica generale.
Consideriamo una funzione reale di una sola variabile reale f(.): R → R. Nei due
punti x0 e x0 + h essa assume rispettivamente i due valori f(x0) e f(x0 + h). L’espressione:
∆f ( x0 ; h) = f ( x0 + h) − f ( x0 )
è la variazione subita dalla funzione al variare di x da x0 a x0 + h. Vogliamo ora
determinare una costante a tale che ah costituisca una approssimazione di ∆f(x0; h).
In altre parole, vogliamo trovare una funzione lineare di h che approssimi la vera
variazione della funzione. Limitiamoci per il momento al caso in cui h è positivo. Il
primo requisito di una approssimazione è che l’errore di approssimazione tenda a 0
al tendere a 0 della variazione h, ovvero:
lim ∆f ( x0 ; h) − ah = lim f ( x0 + h) − f ( x0 ) − ah = 0
h→ 0 +
h→ 0 +
È facile notare però che questo primo requisito o non è soddisfatto, oppure lo è
indipendentemente dal valore di a. In realtà, affinché sia soddisfatto è sufficiente che
f(.) sia continua. Possiamo allora imporre un requisito più stringente, ovvero, che
l’errore di approssimazione tenda a 0 una volta normalizzato al valore di h, ovvero
cap2.pmd
68
15/02/2004, 11.48
2.5 Differenziazione
69
lim
h→ 0 +
f ( x0 + h) − f ( x0 ) − ah ∆f ( x0 ; h)
=
−a=0
h
h
(2.5.1)
Questo requisito invece non è soddisfatto, ammesso che lo sia, indipendentemente
dal valore prescelto per a. Quest’ultimo infatti deve essere il limite destro (per h
tendente a 0) del rapporto
f ( x0 + h) − f ( x0 ) ∆f ( x0 ; h)
=
h
h
detto rapporto incrementale.
Un requisito ancora più stringente del precedente è che il rapporto incrementale
tenda a 0 non solo quando h tende a 0 per valori positivi, ma anche quando vi tende
per valori negativi; in sintesi, richiediamo che
lim
h →0 +
f ( x0 + h) − f ( x0 )
f ( x0 + h) − f ( x0 )
= lim
=
h →0 −
h
h
= lim
h →0
f ( x0 + h) − f ( x0 )
=a
h
(2.5.2)
Tale requisito si può esprimere anche con la notazione alternativa:
f ( x0 + h) − f ( x0 ) − ah = o( h )
(2.5.3)
L’espressione (2.5.3) (dove il termine o|(h)| si chiama o di Landau) significa appunto, semplicemente, che
lim
h →0
f ( x0 + h) − f ( x0 ) − ah
=0
h
e si può utilizzare, secondo la convenienza, in modo equivalente.
Notate che affinché il limite del rapporto incrementale sia finito, per h che tende
a 0 in valore assoluto, è necessario (anche se non sufficiente) che il numeratore del
rapporto incrementale stesso tenda a 0, ovvero
lim f ( x0 + h) = f ( x0 )
h→ 0
Ciò significa che la funzione deve essere continua, ma, come si è detto, questa è solo
una condizione necessaria, non sufficiente, affinché per qualche valore di a la relazione 2.5.1 sia verificata.
Supponiamo ora che la condizione (2.5.2) sia verificata per una valore finito di a.
Se ciò è vero, diciamo che la funzione possiede una derivata prima nel punto x0,
cap2.pmd
69
15/02/2004, 11.49
70
Distanze e variazioni: gli spazi metrici
oppure che è derivabile in x0. La derivata altro non è che questo unico limite il quale
corrisponde al valore, da noi ricercato, di a. D’ora in avanti, però, per indicare la
derivata prima di una funzione non useremo più il generico simbolo a, che abbiamo
impiegato a scopo espositivo, ma la notazione f '(x0). Tale notazione sottolinea la
dipendenza della derivata (qualora questa esista) dal punto x0 rispetto al quale si
considerano le variazioni. Infatti, supponiamo che una certa funzione sia derivabile
su di un certo intervallo (a, b) ⊆ R. Ciò significa, per definizione, che per ogni x ∈ (a, b)
esiste uno e un solo valore f '(x) che costituisce appunto la derivata di f(.) in x. Ma
allora la derivata si può considerare a sua volta come una funzione f '(.): (a, b) → R
(una notazione alternativa per indicare la funzione f '(.): (a,b) → R è Df). Se tale
funzione f '(.) è a sua volta continua, si dice che f(.) (derivabile in (a, b)) è liscia sullo
stesso intervallo (nel paragrafo 1 abbiamo già indicato l’insieme di queste funzioni
1
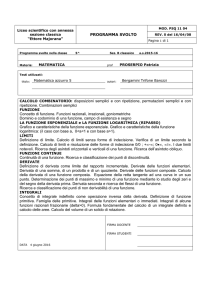
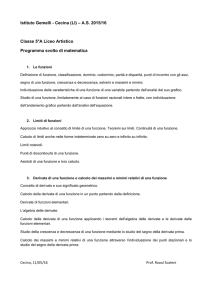
con il simbolo C[a ,b] . Infine, una funzione si dice liscia a tratti in (a, b) se è continua, mentre la sua derivata prima è continua a tratti.
La funzione nel grafico della figura 2.3 è un esempio di funzione liscia a tratti.
Si noti infine che f '(.) potrebbe a sua volta essere derivabile. Chiameremo tale
derivata la derivata seconda di f(.).
L’espressione f '(x0)h, vale a dire la funzione lineare di h, che approssima la “vera”
variazione ∆f(x0; h) = f(x0 + h) – f(x0), si chiama differenziale di f(.) nel punto x0.
Spesso la variazione che noi abbiamo designato come h viene indicata con d x. Vi è
però una importante differenza. Di norma, con d x si intende una variazione
infinitesimale; tuttavia la definizione di differenziale non è valida solo per variazioni
“piccole”, ma per qualsiasi valore di h. Naturalmente, quanto più grande in valore
assoluto è h, tanto “peggiore” sarà l’approssimazione fornita dal differenziale. Una
Figura 2.3
cap2.pmd
70
15/02/2004, 11.49
2.5 Differenziazione
71
volta chiarito questo punto, si possono utilizzare entrambe le notazioni in tutti i casi
in cui non facciano sorgere equivoci. Laddove h viene intesa come prossima a 0 a
piacere, allora il differenziale viene indicato come d f(x0) = f '(x0) d x. Una notazione
alternativa alla nostra (e più antica) per indicare la derivata prima è quindi
d f ( x0 )
dx
2.5.2 Funzioni a più variabili e derivate parziali
Cosa cambierebbe se volessimo estendere la nozione di derivata da una funzione a
una sola variabili a funzioni di più variabili reali, come ad esempio la seguente f(.):
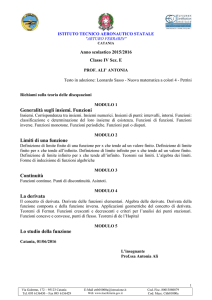
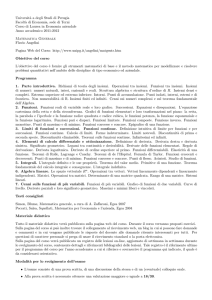
Rn → R? La principale complicazione risiede nel fatto che, mentre una variabile
scalare può variare al più in due direzioni (aumentando o diminuendo), una variabile
vettoriale può variare in infinite direzioni, come è evidente dalla figura 2.4.
Vedremo che ogni generalizzazione della nozione di derivata appena studiata,
corrisponde a una particolare scelta del tipo di variazione da prendere in considerazione. In questo paragrafo ci dedichiamo alla nozione di derivata parziale.
Supponiamo inizialmente che la funzione sia a due variabili, f(.): R2 → R e fissiamo, nel grafico della figura 2.5 un certo punto x0 ∈ R2.
Con la nozione di derivata parziale, si prendono in considerazione unicamente
variazioni del tipo descritto nella figura 2.5, ovvero nelle quali, rispetto al punto
iniziale x0, varia una sola variabile a parità di valore dell’altra. Se ci si muove lungo
le frecce orizzontali, si mantiene costante il valore di x2 e si fa variare, in aumento
o in diminuzione, l’altra variabile. L’opposto è vero se ci muove lungo le frecce
verticali.
Figura 2.4
cap2.pmd
71
15/02/2004, 11.49
72
Distanze e variazioni: gli spazi metrici
Figura 2.5
Più in generale, supponiamo che vi siano n variabili indipendenti. Definiamo ei ∈ Rn
come il vettore che ha 1 nella i-esima posizione e 0 altrove. L’espressione
∆f (x0 ; λei ) ≡ f ( x0 + λei ) − f ( x0 )
rappresenta dunque la variazione subita dalla funzione allorché tutte le variabili restano costanti tranne la i-esima, che subisce una variazione pari a λ. Ancora, cercheremo una funzione lineare di λ, aλ, costituisca una approssimazione di tale “vera”
variazione, ovvero tale che:
∆f (x0 ; λei ) − aλ = f ( x0 + λei ) − f ( x0 ) − aλ = o( λ )
(2.5.4)
Bisogna quindi che i limiti
lim
f (x0 + λei ) − f (x0 )
λ
lim
f (x0 + λei ) − f (x0 )
λ
λ →0+
λ →0−
esistano, siano finiti e coincidano. Questo comune limite (il valore di a da noi ricercato) si chiama derivata parziale di f(.) rispetto a xi in x0 ed è indicato con varie
possibili notazioni: le principali sono
∂f ( x )
e fi (x0 )
∂xi x = x
0
cap2.pmd
72
15/02/2004, 11.49
2.5 Differenziazione
73
Una notazione più snella rispetto alla prima è
∂f ( x 0 )
∂xi
e verrà utilizzata tutte le volte in cui non dia luogo a equivoci.
L’espressione
∂f ( x )
∂x λ
i
ovvero il termine che approssima la variazione della funzione si dice differenziale
parziale. La variazione λ è anche indicata come d xi.
Per quanto uno studio delle tecniche di derivazione non sia tra gli scopi di questo
capitolo, si può ricordare che il calcolo di una derivata parziale non comporta alcuna
difficoltà aggiuntiva rispetto al calcolo della derivata di una funzione a una sola
variabile. Si tratta infatti di considerare, volta a volta, tutte la variabili diverse dalla
i-esima, come costanti, e la funzione f(.) come una funzione della sola variabile
i-esima, anche ai fini della derivazione.
La successiva definizione introduce una utile notazione matriciale.
Definizione 2.5.1
Data una funzione f(.): Rn → R che abbia derivate parziali rispetto a tutte le n
variabili, il vettore:
∂f ( x ) ∂f ( x )
∂f ( x )
∇f ( x ) ≡
...
∂x2
∂xn
∂x1
■
si dice gradiente di f(x).
Considerate ora la derivata parziale fi(x0). Essa dipende in generale da quale punto x0
è stato prescelto come valore iniziale, a partire dal quale sono calcolate le variazioni.
Pertanto essa è una funzione a più variabili. Possiamo perciò fornire la seguente
definizione.
Definizione 2.5.2
Se la derivata parziale i-esima di f(.): Rn → R, ossia
fi (.) ≡
cap2.pmd
73
∂fi (.)
: Rn → R
∂xi (.)
15/02/2004, 11.49
74
Distanze e variazioni: gli spazi metrici
è continua in x, per ogni i = 1, 2, ..., n, allora si dice che f(.) è una funzione liscia
di x. Se fi(.) possiede a sua volta derivate parziali, queste si chiamano derivate
seconde parziali di f(.). La derivata prima parziale rispetto a xk della derivata
prima parziale di f(.) rispetto a xi si indica con una delle seguenti notazioni:
∂f i ( x )
∂ 2 f ( x)
= fik (x) =
∂xk
∂xi ∂xk
Se k ≠ i, allora si dice che fik(x)è una derivata seconda parziale mista di f(.). ■
D’altro canto, se la derivata parziale rispetto a xi, fi(x), può considerarsi una funzione
a più variabili, se essa possiede derivate parziali (e quindi se f(.) possiede derivate
seconde parziali) sarà possibile definire per essa il vettore gradiente, che sarà così
composto:
∇fi (x) ≡ [ fi1 (.) fi 2 (.) ... fin (.) ]
Se poi per ogni derivata parziale prima di f(.) calcoliamo tale gradiente, e se riuniamo
ordinatamente questi vettori come righe di una matrice, ciò che otterremo sarà:
∇f1 ( x) f11 ( x) f12 ( x)
∇f ( x ) f ( x )
...
2
= 21
H f ( x) ≡
... ...
...
...
∇f n ( x) f n1 ( x)
... f1n ( x)
...
...
...
...
... f nn ( x)
Questa matrice è nota come matrice hessiana di f(x). Si può formulare la seguente
proposizione.
Proposizione 2.5.1
Se le derivate seconde parziali di una funzione f(.): Rn → R sono continue (cioè
se le derivate parziali prime di f(.) sono tutte funzioni lisce) allora la matrice
■
hessiana è simmetrica.
Infine, definiamo per uso futuro la matrice
∇f ( x )
0
H bf (x) ≡
(∇f (x))' H f (x)
che si dice matrice hessiana orlata.
cap2.pmd
74
15/02/2004, 11.49
2.5 Differenziazione
75
Esercizio 2.7
Calcolate il gradiente, la matrice hessiana e la matrice hessiana orlata per le seguenti
funzioni
a) f(x, y) = Axαyβ.
b) f(x, y) = (x + yβ)γ.
c) f(p, m, q) = (p + m) ⋅ D(p, q) – C(m) dove D(.,.): R2 → R e C(.): R → R.
■
2.5.3 La formula di Taylor
Data una funzione f(.): [a, b] → R, sappiamo che la variazione f(b) – f(a) è approssimata da f '(a)(b – a), con un certo errore di approssimazione. La formula di Taylor
pone questo errore di approssimazione in relazione con i valori assunti dalle derivate
di ordine superiore al primo. Cominceremo enunciando un noto teorema, che utilizzeremo poi per la dimostrazione successiva.
Proposizione 2.5.2 (Teorema di Rolle)
Se f(.): [a, b] → R è una funzione differenziabile ovunque nell’intervallo [a, b] e
■
se f(a) = f(b), allora esiste almeno un punto ξ ∈ (a, b) tale che f'(ξ) = 0.
Sulla base del teorema di Rolle si può dimostrare la seguente proposizione.
Proposizione 2.5.3 (Teorema di Cauchy)
Se f(.): [a, b] → R e g(.): [a, b] → R sono funzioni differenziabili ovunque nell’intervallo [a, b] e se g'(.) ≠ 0, allora esiste almeno un punto ξ ∈ (a, b) tale che
f (b) − f (a ) f’(ξ)
=
g (b) − g (a ) g’(ξ)
■
Prova: definiamo la funzione φ(x) = (g(b) – g(a))f(x) + (f(a) – f(b))g(x), che, nelle ipotesi del teorema è ovunque differenziabile in [a,b]. Inoltre φ(a) = g(b)f(a) – f(b)g(a) =
φ(b). Pertanto φ(x) soddisfa le ipotesi del teorema di Rolle. Esiste dunque un punto
ξ ∈ (a, b) tale che φ'(ξ) = (g(b) – g(a))f'(ξ) + (f(a) – f(b))g'(x) = 0, il che dimostra la
proposizione.
Proposizione 2.5.4 (Teorema di Taylor per funzioni di una variabile)
Se f(.): [a, b] → R possiede derivate fino all’ordine n-esimo ovunque nell’intervallo [a, b], allora:
f (b) = f (a ) + (b − a ) f’(a ) +
cap2.pmd
75
(b − a ) 2
(b − a ) n −1 n −1
f" (a ) + ... +
f (a ) + Tn
2!
(n − 1)!
15/02/2004, 11.50
76
Distanze e variazioni: gli spazi metrici
dove: Tn =
(b − a ) n n
f (ξ )
n!
■
Prova: definiamo la funzione
φ( x) = f ( x) + (b − x) f’( x) +
(b − x) 2
(b − x) n −1 n −1
f" ( x) + ... +
f ( x)
2!
(n − 1)!
che, nelle ipotesi del teorema è ovunque differenziabile in [a, b]. La derivata è:
φ′( x) =
(b − x)n −1 n
f ( x)
(n − 1)!
Definiamo inoltre la funzione ψ(x) = (b – x)n. Per il teorema di Cauchy
f n ( ξ)
φ(b) − φ(a) φ′(ξ)
=
=
ψ(b) − ψ(a) ψ ′(ξ) −(n − 1)!n
Inoltre
(b − a ) 2
(b − a ) n −1 n −1
φ(b) − φ(a ) = f (b) − f (a ) + (b − a ) f’(a ) +
f" (a ) + ... +
f (a)
(n − 1)!
2!
e ψ(b) – ψ(a) = (b – a)n.
Pertanto:
(b − a ) 2
(b − a ) n −1 n −1 f n (ξ)
f (b) − f (a ) + (b − a ) f’(a ) +
f" (a ) + ... +
f (a) =
(b − a ) n
2!
(n − 1)!
n!
il che conclude la dimostrazione.
Il teorema può essere generalizzato a funzioni di n variabili. Noi proveremo la
generalizzazione al caso a due variabili e proporremo senza una prova formale l’estensione della formula di Taylor al caso generale (in entrambi i casi, limitatamente al
termine di secondo grado).
Proposizione 2.5.5 (Teorema di Taylor per funzioni a due variabili)
Se f(.): R2 → R possiede derivate parziali prime e seconde, allora:
f ( x1 + h1 , x2 + h2 ) = f ( x1 , x2 ) + ( f x1 ( x1 , x2 )h1 + f x2 ( x1 , x2 )h2 ) +
+
cap2.pmd
( f11 ( x1 + h1 , x2 + h2 ) h12 + f 22 ( x1 + h1 , x2 + h2 )h2 2 + f12 ( x1 + h1 , x2 + h2 ) h1h2 + f 21 ( x1 + h1 , x2 + h2 ) h1h2 )
2!
76
15/02/2004, 11.50
2.6 Differenziazione
dove
77
h12 + h22 ≤ h12 + h2 2 .
■
Prova: definiamo la funzione
g (t ) ≡ f ( x1 + th1 , x2 + th2 ) t ∈[0,1]
Pertanto, per la proposizione 2.5.3, avremo:
g (1) = g (0) + g' (0) +
1
g" ( t ) dove t ∈[0,1]
2!
ma
g (1) = f ( x1 + h1 , x2 + h2 ); g (0) = f ( x1 , x2 )
g' (0) = f x1 ( x1 , x2 )h1 + f x2 ( x1 , x2 )h2
e
g" ( t ) = f11 ( x1 + h1 , x2 + h2 )h12 + f 22 ( x1 + h1 , x2 + h2 )h22 +
+ f12 ( x1 + h1 , x2 + h2 )h1h2 + f 21 ( x1 + h1 , x2 + h2 )h1h2
dove
h1 ≡ t h1 , h2 ≡ t h2
Essendo t ∈[0,1], avremo infine che
h12 + h22 = t h12 + h22 ≤ h12 + h2 2
Nel caso di una funzione a n variabili, abbiamo la seguente generalizzazione:
Proposizione 2.5.6 (Teorema di Taylor per funzioni a n variabili)
Se f(.): Rn → R possiede derivate parziali prime e seconde, allora:
f (x + h) = f (x) + ∇f (x)h +
1
h'H (ξ)h
2!
dove H(ξ) è la matrice Hessiana di f(.) valutata in un punto ξ tale che ||ξ – x||
■
≤ ||h||.
cap2.pmd
77
15/02/2004, 11.50