La composizione di isometrie
Quello che è più interessante in una trasformazione geometrica è studiare quali effetti ha sulle
figure e soprattutto valutare quali proprietà delle figure di partenza si conservano nelle figure
trasformate.
Le proprietà invarianti, che si conservano nella figura trasformata, forniscono un sistema di
classificazione per le trasformazioni geometriche.
Le isometrie o congruenze sono trasformazioni, riconducibili a movimenti rigidi, nel piano che
conservano le distanze fra i punti, trasformando una figura in una congruente.
La figura trasformata è “spostata” senza essere deformata e conserva tutte le proprietà geometriche
dell’originale. Le proprietà geometriche delle figure sono, quindi, invarianti di una trasformazione
isometrica.
Appartengono alle isometrie:
• traslazioni
• rotazioni
• simmetrie centrali
• simmetrie assiali
E’ possibile, inoltre, considerare la composizione di trasformazioni geometriche.
Una composizione di trasformazioni geometriche è l’applicazione in successione di più
trasformazioni a una stessa figura. Applicare più trasformazioni di uno stesso tipo corrisponde in
alcuni casi a un’altra trasformazione o dello stesso tipo o diversa.
Composizione di trasformazioni geometriche
Trasformazione corrispondente
Due traslazioni
Traslazione che si ottiene applicando a una
figura la somma dei vettori delle due traslazioni.
Due rotazioni
Rotazione che ha lo stesso centro di rotazione e
come angolo uguale alla somma dei due angoli
di rotazione.
Due simmetrie centrali
Traslazione che ha come vettore un vettore
doppio a quello che si ottiene congiungendo i
due centri di simmetria.
Due simmetrie assiali con assi paralleli
Traslazione il cui vettore è un vettore con
modulo doppio rispetto alla distanza tra le due
assi.
Due simmetrie assiali con assi perpendicolari
Rotazione di un angolo piatto e con centro di
rotazione nell’intersezione degli assi ovvero una
simmetria centrale.
© Mondadori Education
Composizione di traslazioni
La traslazione è una trasformazione geometrica isometrica in cui ciascun punto della figura è
spostato sul piano sempre lungo la stessa direzione, nello stesso verso e per una stessa distanza. Per
indicare direzione, verso e distanza si usa un vettore ( v ).
La composizione di due traslazioni è una traslazione che si ottiene applicando a una figura la
somma dei vettori delle due traslazioni.
Utilizzando un software per la geometria dinamica
vediamo come si opera con un esempio.
Il lavoro può essere eseguito anche su carta.
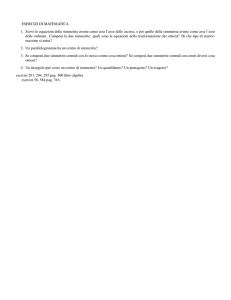
Sia dato il triangolo di vertici A(3; 6), B(2; 4) e C(4; 3).
Si deve traslare il triangolo ABC secondo i vettori
v (2;1) e u (2; −1) .
I programmi hanno uno strumento dedicato per la
traslazione (in GeoGebra:
Traslazione).
Si esegue una prima traslazione usando il vettore v . Si
applica alla trasformata ottenuta una seconda traslazione
usando il vettore u .
La composizione delle due traslazioni, secondo i vettori
v (2;1) e u (2; −1) , corrisponde a una traslazioni pari alla
somma dei due vettori.
Si trova la somma di due vettori utilizzando la regola
del parallelogramma.
Si fa scorrere uno dei due vettori in modo che i punti di
applicazione coincidano. Il vettore spostato si dice
equipollente al precedente. Si tracciano le parallele ai
due vettori a partire dai loro punti estremi in modo da
ottenere un parallelogramma. La diagonale del
parallelogramma è il vettore somma o risultante.
v +u = w
Applicando questo vettore al triangolo si ottiene lo stesso
spostamento applicando uno dopo l’altro i due vettori.
La somma dei due vettori è commutativa, quindi
indipendente da quale vettori si applichi per primo.
© Mondadori Education
Composizione di rotazioni
La rotazione è una trasformazione geometrica isometrica individuata da un punto, da un angolo di
ampiezza data e da un verso che può essere orario o antiorario.
La composizione di due rotazioni è una rotazione che ha lo stesso centro di rotazione e come angolo
uguale alla somma dei due angoli di rotazione.
Utilizzando un software per la geometria dinamica
vediamo come si opera con un esempio.
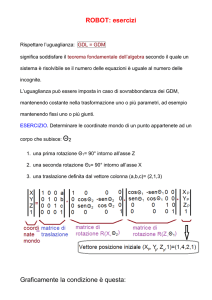
Sia dato il parallelogramma di vertici A(2; 6), B(1; 4),
C(2; 4) e D(3; 6).
Il centro di rotazione è O(3; 2).
Si deve ruotare, utilizzando come centro di rotazione il
punto O, il parallelogramma di un angolo di 45° in senso
orario e la figura ottenuta di un ulteriore di 45° in senso
orario.
I programmi hanno uno strumento dedicato per la
rotazione (in GeoGebra:
Rotazione).
Il lavoro può essere eseguito anche su carta.
Si applica una prima rotazione usando il centro, l’angolo
e il verso indicati. Si applica, quindi, alla trasformata
ottenuta una seconda rotazione usando lo stesso centro e
l’angolo e il verso indicati.
La composizione delle due rotazioni secondo i due
angoli α = 45° e β = 45° corrisponde alla somma degli
angoli. Il centro di rotazione resta lo stesso.
45° + 45° = 90°
Applicando una rotazione, con angolo pari alla somma
α + β , al parallelogramma si ottiene lo stesso
spostamento ottenuto applicando una dopo l’altra le due
rotazioni.
La somma delle due rotazioni è commutativa, quindi
indipendente da quale angolo si applichi per primo.
© Mondadori Education
Composizione di simmetrie centrali
Una simmetria centrale è una trasformazione geometrica ottenuta dalla rotazione riferita a un centro
di rotazione e applicando un angolo piatto.
Poiché una simmetria centrale è una particolare rotazione, si può dimostrare che anche la simmetria
centrale è un’isometria.
La composizione di due simmetrie centrali corrisponde a una traslazione che ha come vettore un
vettore doppio a quello che si ottiene congiungendo i due centri di simmetria.
Utilizzando un software per la geometria dinamica
vediamo come si opera con un esempio.
Il lavoro può essere eseguito anche su carta.
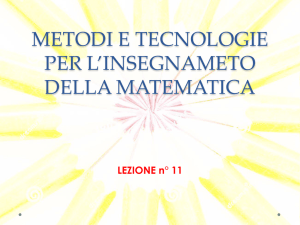
Sia dato il triangolo di vertici A(3; 6), B(2; 4) e C(4; 3).
I due centri di rotazione sono O(5; 5) e O’(7; 3).
I programmi hanno uno strumento dedicato per la
simmetria centrale (in GeoGebra:
Simmetria
centrale). Si applica una prima simmetria centrale
usando il centro indicato. Si applica, quindi, alla
trasformata ottenuta una seconda simmetria centrale
usando il secondo centro indicato.
Si può osservare che la composizione di due simmetrie
centrali corrisponde a una traslazione che ha come
vettore un vettore con modulo doppio a quello che si
ottiene congiungendo i due centri di simmetria.
Componendo due simmetrie centrali non si ottiene
quindi una nuova simmetria centrale ma una traslazione.
© Mondadori Education
Composizione di simmetrie assiali
La simmetria assiale si ottiene con un ribaltamento di 180° rispetto a una retta. Questa retta, detta
asse di simmetria, è equidistante alla figura iniziale e a quella trasformata.
Due figure con simmetria assiale sono ribaltate una rispetto all’altra. La figura iniziale e quella
trasformata sono congruenti ma per sovrapporle è necessario ribaltare una di esse sull’altra. La
simmetria assiale è un movimento rigido inverso e le due figure si dicono inversamente congruenti.
Composizione di due simmetrie assiali con i due assi paralleli.
La composizione di due simmetrie assiali con assi paralleli è una traslazione il cui vettore è un
vettore con modulo doppio rispetto alla distanza tra i de assi.
Utilizzando un software per la geometria dinamica
vediamo come si opera con un esempio.Sia dato il
triangolo di vertici A(1; 6), B(0; 5) e C(1; 3). I due assi
sono tra loro paralleli ( r s ).
Si devono applicare le due simmetrie assiali prima di
asse r e poi di asse s sulla prima figura trasformata
ottenuta.
I programmi hanno uno strumento dedicato per la
simmetria assiale (in GeoGebra:
Simmetria assiale).
Si applica una prima simmetria assiale usando l’asse r
indicato. Si applica, quindi, alla trasformata ottenuta una
seconda simmetria assiale usando il secondo asse
indicato (s).
Lo stesso risultato si poteva ottenere
applicando un vettore che abbia una lunghezza doppia
della distanza che vi è tra gli assi.
Il vettore risultante ha, infatti, modulo doppio della
distanza degli assi.
© Mondadori Education
Composizione di due simmetrie assiali con i due assi perpendicolari.
La composizione di due simmetrie assiali con assi perpendicolari è una rotazione di un angolo
piatto e con centro di rotazione nell’intersezione degli assi. La composizione di due simmetrie
assiali con assi perpendicolari corrisponde, quindi, a una simmetria centrale.
Utilizzando un software per la geometria dinamica
vediamo come si opera con un esempio. Sia dato il
triangolo di vertici A(2; 6), B(1; 5) e C(2; 4). I due assi
sono tra loro perpendicolari ( r ⊥ s ).
Si devono applicare le due simmetrie assiali prima di
asse r e poi di asse s sulla prima figura trasformata
ottenuta.
I programmi hanno uno strumento dedicato per la
simmetria assiale (in GeoGebra:
Simmetria assiale).
Si applica una prima simmetria assiale usando l’asse r
indicato. Si applica, quindi, alla trasformata ottenuta una
seconda simmetria assiale usando il secondo asse
indicato (s). Lo stesso risultato si poteva ottenere
applicando una simmetria centrale con centro
nell’intersezione degli assi.
© Mondadori Education
Mettiti alla prova
1 Disegna in un piano cartesiano il triangolo ( ) di vertici A(2; 5), B(1; 3) e C(3; 1). Crea un
vettore( ) u = (2;3) e un vettore( ) v = (4;0) . Applica al poligono una traslazione di vettore u
( ) e al trasformato A’B’C’ ottenuto una traslazione di vettore v ( ). Indica le coordinate dei
punti corrispondenti nella figura trasformata A’’B’’C’’ e il vettore somma u + v ottenuto con la
reagola del parallelogramma. Verifica che il vettore somma è pari alla composizione delle due
traslazioni. [A’’(8; 8); …]
2 Disegna in un piano cartesiano il triangolo ( ) di vertici A(-5; 2), B(-5; -1) e C(0; -1). Crea un
vettore ( ) u = (3;3) e un vettore ( ) v = (4;1) . Applica al poligono una traslazione di vettore u
( ) e al trasformato A’B’C’ ottenuto una traslazione di vettore v ( ). Indica le coordinate dei
punti corrispondenti nella figura trasformata A’’B’’C’’ e il vettore somma u + v ottenuto con la
reagola del parallelogramma. Verifica che il vettore somma è pari alla composizione delle due
traslazioni. [A’’(2; 6); …]
3 Disegna in un piano cartesiano il triangolo (
) di vertici A(3; 5), B(1; 3) e C(3; 1). Individua il
centro di rotazione O(5; 5). Applica al poligono una rotazione (
) di centro O, di 90° e di verso
orario e al trasformato A’B’C’ ottenuto una rotazione ( ) sempre di centro O, di 180° e di verso
orario. Indica le coordinate dei punti corrispondenti nella figura trasformata A’’B’’C’’. Verifica che
una rotazione di centro O e con angolo pari alla somma dei due angoli dati è pari alla composizione
delle due rotazioni. [A’’(5; 3); …]
4 Disegna in un piano cartesiano il triangolo ( ) di vertici A(-4; 3), B(-6; 0) e C(-3; -1). Individua
due centri di rotazione O(-1; 3) e O’(1; 1). Applica al poligono una simmetria centrale ( ) di
centro O, di 180° e di verso orario e al trasformato A’B’C’ ottenuto una simmetria centrale ( ) di
centro O’, di 90° e di verso orario. Indica le coordinate dei punti corrispondenti nella figura
trasformata A’’B’’C’’. Verifica che la composizione delle due simmetrie centrali corrisponde a una
traslazione. [A’’(3; 0); …]
5 Disegna in un piano cartesiano il triangolo ( ) di vertici A(-3; 4), B(-6; 5) e C(-2; 1). Individua
una retta parallela all’asse delle ordinate e passante per il punto P(4; 0). Applica al poligono una
simmetria assiale ( ), usando come asse di simmetria l’asse delle ordinate. Applica al trasformato
A’B’C’ una simmetria assiale ( ), usando come asse di simmetria alla retta individuata dal punto
P. Indica le coordinate dei punti corrispondenti nella figura trasformata A’’B’’C’’. Verifica che la
composizione delle due simmetrie assiali corrisponde a una traslazione. [A’’(5; 4); …]
6 Disegna in un piano cartesiano il triangolo ( ) di vertici A(-5; -1), B(-5; -4) e C(-2; -4). Applica
al poligono una simmetria assiale ( ), usando come asse di simmetria l’asse delle ordinate.
Applica al trasformato A’B’C’ una simmetria assiale ( ), usando come asse di simmetria l’asse
delle ascisse. Indica le coordinate dei punti corrispondenti nella figura trasformata A’’B’’C’’.
Verifica che la composizione delle due simmetrie assiali corrisponde a una simmetria centrale o a
una rotazione di 180° intorno al punto d’intersezione degli assi. [A’’(5; 1); …]
© Mondadori Education