A cura di:
• Alessio Ciro Romano;
• Joseph Thomas Chun;
• Luca Martinelli.
COSA SONO:
Una trasformazione geometrica
è una corrispondenza biunivoca
che associa ad ogni punto di un
piano uno e un solo punto del
piano stesso.
Può anche essere considerata
come la corrispondenza biunivoca
del piano stesso.
Il primo punto si dice
antitrasformato o
controimmagine del secondo
mentre quest’ultimo si dice
immagine del primo
Per ogni trasformazione t esiste una trasformazione inversa 𝑡 −1
In un sistema di riferimento cartesiano ad ogni punto associamo
un punto immagine attraverso due funzioni chiamate equazioni
della trasformazione:
Le proprietà geometriche che si conservano durante la
trasformazione si chiamano invarianti
PARTICOLARITÀ
DEGLI ELEMENTI:
DELLE TRASFORMAZIONI:
Un punto unito è un punto che
Un’identità è una
ha per immagine se stesso
Una figura unita è una figura
che ha per immagine se stessa
e può essere puntualmente
unita (se composta da punti
uniti) o globalmente unita (se
non ci sono punti uniti)
trasformazione nella quale ogni
punto è un punto unito
Una trasformazione involutoria
è una trasformazione t che
composta con se stessa dà
come risultato un’identità
TRASLAZIONE:
IL VETTORE
In un piano cartesiano
identifichiamo un vettore
ponendo uno dei suoi estremi
nell’origine degli assi ed
indicando l’altro attraverso una
coppia di numeri detti
componenti.
Lo stesso vettore può essere
rappresentato con altri segmenti
orientati chiamati equipollenti
ovvero con uguale modulo,
stessa direzione e stesso verso.
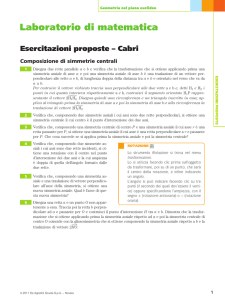
TRASLAZIONE
Una traslazione di vettore 𝑉è una trasformazione che associa ad un
punto P un punto P’ tale che il vettore cha ha questi punti come
estremi sia equipollente a V.
Una traslazione può essere orizzontale (a;0), o verticale (0;a) ed in
generale è descritta dalle equazioni:
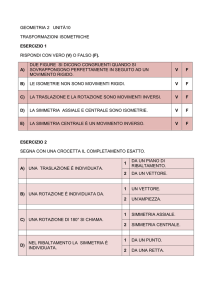
ROTAZIONE
Fissati nel piano un punto O ed un angolo α la rotazione di
ampiezza α è la trasformazione che ad ogni punto P del
piano fa corrispondere il punto P’ tale che il segmento 𝑃𝑃′
= 𝑂𝑃′ .
La rotazione è descritta dalle equazioni, se O coincide con
l’origine degli assi:
In caso contrario:
𝑥 ′ = (𝑥 − 𝑥𝑐 )cos α −(𝑦 − 𝑦𝑐 )𝑠𝑒𝑛 α + 𝑥𝑐
𝑦 ′ = (𝑥 − 𝑥𝑐 )𝑠𝑒𝑛 α − 𝑦 − 𝑦𝑐 𝑐𝑜𝑠 α + 𝑦𝑐
ROTAZIONE
Un caso particolare di
rotazione è la rotazione
nulla, ossia la rotazione di
angolo nullo o di un angolo
multiplo di un angolo giro.
La rotazione nulla coincide
con l’identità.
SIMMETRIA CENTRALE
La simmetria centrale è quella
trasformazione che, fissato un
punto C, associa ad ogni punto
P un punto P’ tale che M sia il
punto medio di 𝑃𝑃′ .
La simmetria centrale è
descritta dall’equazione:
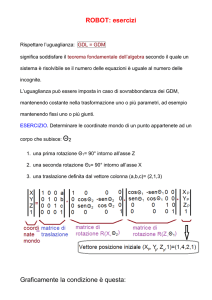
SIMMETRIA ASSIALE
La simmetria assiale è
quella trasformazione
che a partire da una retta
del piano r, ad ogni
punto P associa un punto
P’ tale che r sia l’asse del
segmento 𝑃𝑃′ .
SIMMETRIA ASSIALE
La simmetria assiale può essere
riferita:
All’asse y:
all’asse x:
alla bisettrice del I, III
quadrante:
alla bisettrice del II, IV
quadrante:
ISOMETRIE
Un’isometria è una trasformazione geometrica nella
quale la distanza tra due punti A e B, e le loro
immagini A’ e B’, rimane costante.
𝑥 ′ = 𝑎𝑥 + 𝑏𝑦 + 𝑐
𝑦 ′ = 𝑎′ 𝑥 + 𝑏 ′ 𝑦 + 𝑐′
Utilizzando il metodo di Cramer, individuiamo il
determinante k.
Se k = 1 , allora l’isometria è una traslazione, una
rotazione o una simmetria centrale.
Se invece k = -1 , si tratta di una simmetria assiale.
OMOTETIE
Un’omotetia è una
trasformazione che, dato un
centro O e un numero reale
k ≠ 0, associa ad ogni punto
P un punto P’ tale che:
𝑂𝑃′ = k · 𝑂𝑃
Questa trasformazione è
descritta dalla seguente
equazione:
𝑥 ′ = 𝑘 𝑥 − 𝑥𝑐 + 𝑥𝑐
𝑦 ′ = 𝑘 𝑦 − 𝑦𝑐 + 𝑦𝑐
PROPRIETÀ DELLE OMOTETIE
Se k > 1 l’omotetia ingrandisce la figura.
Se k < 1 l’omotetia rimpicciolisce la figura.
Se k > 0 due punti corrispondenti si trovano sulla
stessa semiretta di origine O.
Se k < 0 essi si trovano su due semirette opposte.
SIMILITUDINI
Si definisce una similitudine una
trasformazione geometrica che mantiene
costante il rapporto tra segmenti
corrispondenti ossia comunque si scelgano i
punti A e B, considerati i loro trasformati A’ e
B’ , si ha:
𝐴′ 𝐵′
𝐴𝐵
=k
In cui il valore di k (sempre positivo) viene
detto rapporto di similitudine. Ha le seguenti
equazioni:
𝑥 ′ = 𝑎𝑥 − 𝑏𝑦 + 𝑐
𝑦′′ = 𝑏𝑥 + 𝑎𝑦 + 𝑐′
𝑥 = 𝑎𝑥 + 𝑏𝑦 + 𝑐
𝑦 ′ = 𝑏𝑥 − 𝑎𝑦 + 𝑐′
Con k= 𝑎2 + 𝑏 2
AFFINITÀ
Un’affinità è una trasformazione
geometrica che trasforma rette in rette
e mantiene il parallelismo.
Le affinità non conservano le figure, né
gli angoli.
Le proprietà tipiche delle affinità che
consentono, nella trasformazione, di
mantenere invariate le figure vengono
dette invarianti.
Esse sono:
Allineamento (tra tre o più punti);
Parallelismo (tra rette);
Incidenza (due rette incidenti nel
punto P).
EQUAZIONI DI UN’AFFINITÀ
Un’affinità è definita dall’equazione:
𝑥 ′ = 𝑎𝑥 + 𝑏𝑦 + 𝑐
′
con ab’-a’b≠0
′
′
𝑦 = 𝑎 𝑥 + 𝑏 𝑦 + 𝑐′
È necessario distinguere due casi:
Affinità diretta: se ab’-a’b > 0 (viene mantenuto
l’orientamento dei vertici di un poligono);
Affinità indiretta: se ab’-a’b < 0 (l’orientamento viene
invertito).
RICAPITOLANDO…