Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
Geometria Analitica nello Spazio tridimensionale.
1. Introduzione
1.1 Premesse
Fissiamo arbitrariamente nello spazio tridimensionale della geometria euclidea un punto O e
consideriamo l'insieme di tutti i vettori dello spazio applicati in O.
Denoteremo tale insieme con il simbolo: VO3.
In VO3 si possono introdurre le operazioni di addizione tra vettori, e moltiplicazione di questi
per gli scalari; si verifica poi che valgono tutte le rispettive proprietà affinché V03 con questa
struttura algebrica sia uno spazio vettoriale (vedi la sezione Spazi Vettoriali), anzi si può dire che la
nozione stessa della struttura di spazio vettoriale abbia come prototipo proprio V03.
Mostriamo ora come VO3 con le operazioni di addizione e moltiplicazione per gli scalari,
possa essere identificato con lo spazio vettoriale ℝ3 dotato anch'esso delle operazioni analoghe.
Introduciamo un sistema di riferimento cartesiano ortogonale Oxyz in VO3; ciò equivale a
fissare in V 3 tre vettori ortogonali i , j ,
k di modulo 1 (si dice allora che {i , j ,
k } formano
0
una base ortonormale per V03, vedi anche la sezione Spazi Euclidei).
3
Ne segue che ogni vettore OP∈V
O
si scrive in modo unico, nella forma:
x i y j z
OP=
k
dove x, y, z appartengono ad ℝ e prendono il nome di coordinate del punto P (e, per estensione,
) rispetto alla base {i , j ,
anche del vettore OP
k } di VO3. Resta così definita un'applicazione
j: VO3 ℝ 3 nel modo seguente:
Sia
x i y j z
OP=
k ∈V 03 , allora :
) = (x, y, z).
J( OP
Vale inoltre il seguente risultato fondamentale:
Teorema 1.1 : L'applicazione j: VO3 ℝ 3 sopra definita gode delle seguenti proprietà:
a)
j è biettiva ;
b)
1OP
2= j OP
1 j OP
2 ,
j OP
c)
= j OP
1
j OP
∈V 3o ,
∀ OP
1 , OP
2 ∈V o
∀ OP
3
∀ ∈ℝ
3
L' applicazione j permette di identificare VO3 e ℝ con le rispettive strutture (cioè j è un
isomorfismo di spazi vettoriali (vedi la sezione Applicazioni Lineari).
1
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
N.B. Queste stesse considerazioni possono essere fatte in maniera del tutto analoga considerando
sia VO2 ed ℝ2 che VO1 ed ℝ1 .
1.2 Prodotto scalare
Prima di passare allo studio delle rette e dei piani di VO3, definiamo il prodotto scalare di
due vettori; consideriamo quindi VO3 con una sua base ortonormale {i , j ,
k } . Allora:
Definizione 1.2
v 2 , il
Dati due vettori v1 , v2∈. VO3 si dice prodotto scalare di v1 , v2 e si indica con v1⋅
v 2=∣
v 1∣∣
v 2∣cos , dove α è l'angolo convesso formato dai vettori v1 , v2 e
numero reale : v1⋅
∣
v 1∣,∣v2∣ denotano, rispettivamente, i moduli dei vettori v1 , v2 .
OSSERVAZIONE: Il prodotto scalare di due vettori è nullo se e solo se essi sono ortogonali,
infatti:
v1⋅
v 2 = 0 se e solo se α = π/2 , oppure uno dei due vettori e nullo.
Ricordiamo che il vettore nullo si considera ortogonale a ogni altro vettore (anche a sé stesso).
Proposizione 1.3
Dati due vettori v1 , v2∈ VO3, per il prodotto scalare valgono le seguenti proprietà:
v 2=v2⋅
v1 ;
a) v1⋅
b)
v1⋅ v2 v3= v1⋅
v 2v1⋅
v 3 , ∀ v3∈V 3O ;
v 2= v1⋅
v 2 =v1⋅ v2 , ∀ ∈ℝ ;
c) v1⋅
d) il prodotto scalare di un vettore con se stesso dà:
nullo se e solo se v1 è il vettore nullo.
2
v1⋅
v 1=∣v1∣ ; quindi è sempre positivo ed è
La dimostrazione della proposizione segue dalla Definizione 1.3 e dalla definizione di somma di
vettori.
*
Vediamo come il prodotto scalare di due vettori si “rilegga” in ℝ3 grazie all'identificazione fra
V03 ed ℝ3 che abbiamo visto sopra.
i b jc
Siano OP=a
k ed OQ=a
' i b ' jc '
k due vettori in V03; avremo allora
(ricordando che i⋅i =j⋅j=
k⋅
k =1 e i⋅j=j⋅
k=
k⋅i =0 ) :
OQ=a
i b jc k ⋅a ' i b ' jc '
OP⋅
k =aa ' bb 'cc ' .
Quindi l'operazione di prodotto scalare si può considerare anche in ℝ3 , definita dalla legge:
a , b , c⋅a ' , b ' , c ' =aa 'bb ' cc ' ,
ed è questa che considereremo per tutte le questioni di ortogonalità fra rette e piani espressi tramite
equazioni (grazie alle coordinate cartesiane, come abbiamo visto).
2
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
2. Piani nello spazio.
2.1 Equazione cartesiana ed equazioni parametriche del piano.
Vediamo come è sempre possibile individuare un piano nello spazio tridimensionale grazie
ad una equazione che caratterizza i suoi punti.
Teorema 2.1
Ogni piano dello spazio si rappresenta mediante un'equazione della forma:
ax + bx + cx + d = 0
con a,b,c,d appartenenti a ℝ e v =a , b , c ≠ 0 che risulta perpendicolare al piano. Questa
prende il nome di equazione cartesiana del piano.
Viceversa, ogni equazione del tipo:
rappresenta un piano nello spazio.
ax + bx + cx + d = 0 , con
a , b , c ≠ 0,0 ,0 ,
Dimostrazione.
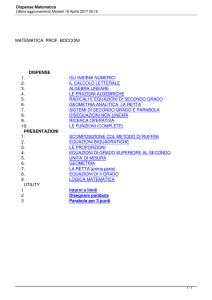
Nello spazio tridimensionale, dotato di un sistema di riferimento cartesiano ortogonale, sia
dato un piano π ; fissiamo un punto P = (x0, y0, z0) sul piano π e consideriamo poi un generico
punto Q = (x, y, z) nello spazio. Vogliamo vedere quali condizioni dobbiamo imporre alle
coordinate (x, y, z) per avere che Q stia su π .
Sia v ∈V 3O un vettore tale che il suo parallelo v ' , applicato in P , sia perpendicolare al
⊥ v ' .
piano π ; Q starà su π se e solo se PQ
Consideriamo che il vettore v abbia coordinate a , b , c , e consideriamo poi il vettore
' , parallelo e di uguale modulo a PQ
; per la regola della somma tra vettori avremo che
OQ
3
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
OQ
' OP
, e quindi:
OQ=
' =OQ−
OP
= (x - x0, y - y0, z – z0) .
OQ
Si ha che
⊥ v ' se e solo se
PQ
⊥ v ' se e solo se
PQ
cui :
' ⊥ v , e per quanto visto sul prodotto scalare, avremo:
OQ
'⋅v =0 , cioè se e solo se: x− x0, y− y0, z−z 0 ⋅a , b , c=0 , da
OQ
a(x - x0) + b(y - y0) + c( z - z0) = 0
Per concludere, posto d = - ax0 - by0 - cz0, otterremo che le condizioni perché Q stia sul piano
sono date proprio dall'equazione (detta equazione cartesiana del piano):
ax + by + cz + d = 0.
*
Notiamo che ogni altra equazione del tipo: λax+ λby + λcz + λd = 0 , per λ ≠ 0, rappresenta
ovviamente lo stesso piano.
Ogni piano nello spazio può essere rappresentato sia in forma “implicita”, mediante una
equazione cartesiana, come visto sopra, sia in forma “esplicita” attraverso delle equazioni
parametriche.
Teorema 2.2
3
Dato nello spazio ℝ un piano π ed un suo punto P = (x1, y1, z1), ogni punto Q = (x, y, z) del
piano si può rappresentare mediante equazioni della forma:
{
dove
∣
x= x 1a 1 ub1 t
y= y 1a2 ub 2 t
z= z 1a 3 ub3 t
v1 = (a1, a2, a3) e
v2 = (b1, b2, b3) sono due vettori indipendenti e paralleli al piano
(ciò si esprime anche dicendo che {v1 , v2 } è una base della “giacitura” del piano), mentre u,t
sono parametri reali. Queste sono dette equazioni parametriche del piano.
4
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
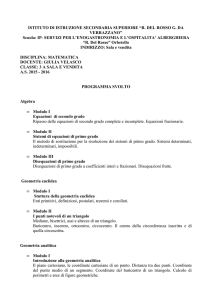
Dimostrazione:
Nella figura, v1 e v2 sono paralleli ai vettori PQ1 e PQ2 . Ogni vettore PQ che
1 e PQ
2 , vale a dire nella
stia sul piano può essere scritto come combinazione lineare di PQ
forma: PQ=u PQ t PQ ; ciò è equivalente a:
1
2
OQ '=u v1 t v2 e cioè : (x -x1, y – y1, z – z1) = u (a1, a2, a3) + t (a1, a2, a3) ,
da cui si ricavano le equazioni parametriche indicate sopra.
*
Piano: complementi.
I seguenti risultati si dimostrano a partire dai teoremi precedenti:
Corollario 2.3.
Dati nello spazio 3 punti distinti non allineati P1 , P2 , P3 , l'equazione del piano passante per
essi è data da :
det
x−x 1 y−y1 z−z 1
x 2− x 1 y 2−y 1 z 2−z 1
x 3− x 1 y 3−y 1 z 3−z 1
= 0.
Dimostrazione:
Abbiamo visto nella dimostrazione del Teorema 2.2 che, perché un punto (x,y,z) stia sul piano, si
deve avere:
(x -x1, y – y1, z – z1) = u (a1, a2, a3) + t (a1, a2, a3) .
Ciò equivale a dire che il vettore (x -x1, y – y1, z – z1) non è linearmente indipendente dai vettori
v1 = (a1, a2, a3) e v2 = (b1, b2, b3).
5
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
Ma nel caso presente (vedi la figura, ove P1 , P2 , P3 svolgono il ruolo prima di O, Q1 , Q2 ), si ha
che:
v1 = (a1, a2, a3) = (x2 - x1, y2 - y1 , z2 – z1) e v2 = (b1, b2, b3) = (x3 - x1, y3 - y1 , z3 – z1)
e quindi che le tre righe della matrice
x−x 1 y−y1 z−z 1
x 2− x 1 y 2−y 1 z 2−z 1
x 3−x 1 y 3−y 1 z 3−z 1
non devono essere linearmente indipendenti, il che equivale al fatto che il suo determinante sia = 0.
*
Corollario 2.4
Ogni piano passante per un punto P0 = (x0, y0, z0) , ha un' equazione cartesiana della forma:
a(x – x0) + b(x – x0) + c(x – x0) = 0 ;
(a, b, c) ≠ (0,0,0) .
Corollario 2.5
Un piano passa per l'origine se e solo se ha un'equazione del tipo:
ax + by + cz = 0 .
Vediamo adesso quando è che due piani si dicono paralleli e come determinare le condizioni di
parallelismo.
Definizione 2.6
Due piani π e π' dello spazio V03 si dicono paralleli, se coincidono, oppure se non hanno punti in
6
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
comune, e si scrive: π // π'. Dunque:
π // π' se e solo se π = π' , oppure ∩' =∅ .
Teorema 2.7.
Siano dati, nello spazio V03 , due piani di equazioni :
π : ax + by + cz + d = 0 ; π': a'x + b'y + c'z + d' = 0 ;
si hanno allora le seguenti due possibilità:
1) π e π' sono paralleli se e solo se:
a b c
=1
a' b' c'
inoltre π e π' sono paralleli disgiunti o paralleli coincidenti a seconda che la matrice:
a b c d
a' b' c' d '
abbia rispettivamente rango 2 oppure 1.
2) π e π' si intersecano in una retta, e si dicono incidenti , se e solo se:
r
r
a
a'
b c
=2 .
b' c'
Dimostrazione: Entrambe le cose si deducono osservando che il sistema :
∣
{
axbyczd =0
a ' xb ' y c ' zd '=0
nel caso 2) ha infinite soluzioni con una variabile libera, mentre nel caso 1) se
r
a
a'
b
b'
c
c'
d
d'
=2 ,
il sistema non ha soluzioni, mentre ne avrà infinite (con 2 variabili libere ), se
r
a
a'
b c
b' c'
d
d'
=1.
Piani perpendicolari
Consideriamo adesso la condizione di perpendicolarità fra piani nello spazio.
7
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
Definizione 2.8
è perpendicolare a π, e si
Dato un piano π ed un punto S ∈ , si dice che un vettore ST
scrive ST ⊥ , se ST è perpendicolare ad ogni vettore SQ con Q∈ .
Due piani π, π' si dicono perpendicolari, e si scrive ⊥' , se si intersecano in una retta r ed
su tale che ST
⊥ '
esiste un vettore ST
Teorema 2.9
Dati nello spazio due piani, di equazione, rispettivamente:
ax + by + cz + d = 0 , a'x + b'y + c'z + d' = 0
⊥' se e solo se aa' + bb' + cc' = 0 .
si ha:
Dimostrazione.
Ricordiamo che dato un piano di equazione ax + by + cz + d = 0 , il vettore di V03 definito
dal punto di coordinate (a,b,c) è ad esso perpendicolare; allora considerando i vettori di V03
definiti dai punti di coordinate (a,b,c) e (a',b',c') , risulta che:
⊥' se e solo se a , b , c⊥ a ' ,b ' , c ' , il che si ha se e solo se
a , b , c⋅a ' , b ' , c ' =0 .
Ciò equivale a:
aa' + bb' + cc' = 0 .
*
8
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
3. Rette nello spazio.
3.1 La retta, equazioni cartesiane e parametriche.
Osserviamo che ogni retta nello spazio tridimensionale della geometria euclidea può essere
definita tramite l'intersezione di due piani distinti che la contengono.
Teorema 3.1
Ogni retta dello spazio tridimensionale dotato di coordiante cartesiane si può rappresentare
mediante un sistema di due equazioni della forma :
ax + by + cz + d = 0
a'x + b'y + c'z + d' = 0
tale che:
rg a b
a ' b'
c =2.
c'
Tali equazioni prendono il nome di equazioni cartesiane della retta. Viceversa ogni sistema di
equazioni come quello sopra rappresenta una retta nello spazio tridimensionale.
Dimostrazione.
Sia data una retta arbitraria r dello spazio tridimensionale e consideriamo due piani distinti π e π'
contenenti r, di equazioni:
ax + by + cz + d = 0
a'x + b'y + c'z + d' = 0
Visto che π e π' non sono paralleli, per il Teorema 2.7 si ha :
rg a b
a ' b'
c =2.
c'
e quindi sempre in virtù dello stesso teorema, i punti della retta r sono rappresentati proprio dalle
soluzioni del sistema formato dalle due equazioni.
Viceversa dato un sistema di questo tipo, esso rappresenta certamente una retta dello spazio, in
virtù del Teorema 2.7.
*
9
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
Equazioni parametriche
Ogni retta nello spazio può essere rappresentata sia in forma "implicita", mediante equazioni
cartesiane, come abbiamo appena visto, che in forma esplicita attraverso delle equazioni
parametriche.
Teorema 3.2
Ogni retta dello spazio si può rappresentare mediante equazioni della forma:
x=l tx 0
y=mt y 0
z=nt z 0
ove x 0, y 0, z 0, l , m , n ∈ ℝ , , (a,b,c) ≠ (0, 0, 0) e t è un parametro reale. Queste prendono il
nome di equazioni parametriche della retta considerata.
Viceversa, ogni terna di equazioni di questo tipo rappresenta una retta dello spazio.
Dimostrazione.
Data nello spazio una retta r, fissiamo arbitrariamente su di essa due punti distinti P1, P0 di
coordinate : P1= (x1, y1, z1) , P0 = (x0, y0, z0). Sia invece P = (x, y, z) un punto generico dello
spazio; cerchiamo di esprimere la condizione che P ∈r .
10
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
Consideriamo i vettori O P ' 1 , OP ' , paralleli rispettivamente ai vettori P 0P1 , P0 P ;
essi sono dati, per la regola della differenza tra vettori, da:
0 , OP ' =OP−OP
0 .
O P ' 1=OP1−OP
Poiché P ∈r se e solo se esiste un numero reale t per cui su abbia P0 P = t P 0P1 , ciò
equivale a OP ' = t O P ' 1 dalla quale si ha:
= OP
0t OP
' 1 = OP
0t OP
1−OP
0 .
OP
che equivale a dire, usando le coordinate dei punti:
P = (x, y, z) = (x0, y0, z0) + t(x1 – x0, y1 - y0 , z1 – z0) , e cioè
x = x0 + t (x1 - x0) , y = y0 + t (y1 - y0) , z = z0 + t (z1 - z0) ,
da cui la tesi, ponendo :
l = x1 – x0 , m = y1 – y0 , n = z1 – z0
Viceversa data una terna di equazioni del tipo:
x=l tx 0
y=mt y 0
z=nt z 0
si verifica che queste sono le equazioni parametriche della retta P1P0 , ponendo P0= (x0, y0, z0) e
P1= (x0 + l, y0 + m, z0 + n), e il teorema è dimostrato.
Osserviamo che se l'origine degli assi, O, appartiene alla retta, le equazioni parametriche si
semplificano; infatti prendendo P0 = (0, 0, 0), esse diventano
x=l t
y=mt
z=nt
11
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
3.2 Calcolo dei parametri direttori di una retta.
Vediamo concretamente come possono essere calcolati i parametri direttori di una retta r, cioè
una terna (l,m,n) che indica la direzione della retta nello spazio (ciò equivale a dire il che vettore
, ove P = (l,m,n) , è parallelo ad r).
OP
Esaminiamo i diversi casi possibili:
se la retta r è definita mediante equazioni parametriche della forma
x=l t x 0
y=mt y 0
z=nt z 0
i parametri direttori (l,m,n) sono forniti esplicitamente dalle equazioni stesse
Esempi:
x=4t3
y=−3t
z =−t−3
x=4
y=3t
z=5
La prima retta ha parametri direttori (4,-3.1); la seconda (0,3,0).
se la retta r è definita come retta congiungente due punti distinti assegnati:
P1= (x1, y1, z1) e P2= (x2, y2, z2) r ,
il calcolo è immediato ricordando la dimostrazione del Teorema 3.2:
l = x2 - x1
m = y2 - y1
n = z2 – z1
Esempio:
Trovare l'equazione parametrica di una retta r passante per i punti:
P1 = (1, -1, 3) e P2 = (2, - 1, 4).
Il vettore direttore sarà dato da:
l = x2 - x1= 1
m = y2 - y1= 0
n = z2 - z1 = 1
(l, m, n) = (1, 0, 1)
e le equazioni parametriche saranno:
x=1+t
y=-1
z=3+t
se la retta r è assegnata mediante equazioni cartesiane della forma:
ax + by + cz + d = 0
a'x + b'y + c'z + d' = 0
12
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
si può procedere in diversi modi:
1) calcolando due soluzioni distinte del sistema lineare, quindi trovando due punti distinti
della retta r e utilizzando poi la regola precedente.
2) Trasformando le equazioni in parametriche e ottenendo da queste direttamente i
parametri direttori.
3) Usufruendo del prodotto vettoriale (vedi ultima sezione) con il quale si ottiene:
l = det b c , m = −det a c , n = det a b
.
b' c'
a' c'
a' b'
Esempio:
Data una retta r di equazioni cartesiane:
x + y + 5 = 0
x
- y
+ 2z = 0
avremo che :
l = det 1 0 =2 , m = −det 1 0 =2 , n = det 1 1 =−2 .
−1 2
1 2
1 −1
Quindi (l, m, n) = (2, 2, -1).
3.3 Passaggio da equazioni parametriche a cartesiane e viceversa
Affrontando gli esercizi ci accorgeremo che a volte sono più utili le equazioni cartesiane della
retta e altre volte quelle parametriche, quindi è importante saper passare dalle une alle altre e
viceversa.
Vediamo i due procedimenti utilizzando qualche semplice esempio:
i Da parametriche a cartesiane
Se abbiamo una retta in equazioni parametriche come :
x= t+1
y = - 2t + 2
z = - 4t +1
possiamo ottenere le cartesiane nel seguente modo:
13
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
- ricaviamo il parametro t dalle equazioni e considerando le relazioni ottenute:
t = ( x - 1) = (y - 2)/2 = (z - 1)/4
ricaviamo le equazioni cartesiane, eliminando il parametro t e uguagliando il primo e secondo
membro, e poi il primo e il terzo:
x - 1 = (y - 2)/2
2x - y = 0
x - 1 = (z - 1)/4
4x - z = 0
Ovviamente avremmo potuto uguagliare il primo al secondo e poi il secondo al terzo ottenendo
altre equazioni cartesiane equivalenti alle precedenti.
Nell'eliminare il parametro t l'unica accortezza che bisogna avere è che qualora in una delle
equazioni manchi il parametro, tale equazione può essere assunta direttamente come una delle
cartesiane.
i Da cartesiane a parametriche
Per passare dalle equazioni cartesiane alle parametriche, basta risolvere il sistema lineare
formato dalle equazioni cartesiane della retta. Tale sistema possiede sicuramente
soluzioni e
risolvendo rispetto ad una variabile libera usata come parametro avremo delle equazioni
parametriche. Ad esempio:
2x + z -1 = 0
y-z+1=0
Risolvendo rispetto alla variabile x otteniamo:
z = 2x - 1
z = 2x - 1
y = 2x - 1 + 1
y = 2x
x=t
quindi
y = 2t
z = 2t - 1
3.4 Posizioni reciproche di due rette
Definizione 3.3
Date nello spazio due rette r, r' si dice che:
i
r, r' sono complanari se sono contenute nello stesso piano;
r è parallela a r' (e si scrive: r // r' ) se r e r' sono complanari e inoltre, o coincidono o non
i hanno punti in comune;
14
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
i r, r' sono incidenti se hanno un unico punto in comune ;
r, r' sono perpendicolari, e si scrive r ⊥ r ' , se i vettori direttori delle due rette sono
i perpendicolari.
Possiamo notare che nello spazio esisteranno rette perpendicolari disgiunte, ovvero senza
alcun punto in comune e rette perpendicolari incidenti;
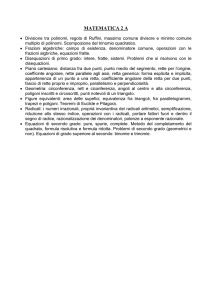
r, r' sono sghembe, se non sono complanari. Notiamo che
i r, r' sghembe se e solo se r ed r' non sono parallele e r ∩r ' = ∅ .
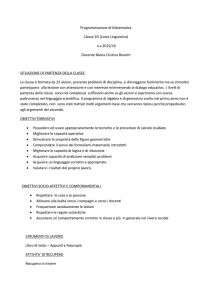
Nell'immagine seguente:
- due rette sghembe r e r', una sul piano xy e una su quello xz,
- due rette parallele r e r', entrambe sul piano xy (una è l'asse y).
Osservazione 3.4
Due rette r e r' sono complanari se e solo se una delle condizioni seguenti è verificata:
1. r ed r' sono parallele;
2. r ed r' sono incidenti.
In particolare r ed r' sono complanari se e solo se non sono sghembe.
Teorema 3.5
Date nello spazio due rette r, r', i cui vettori direttori sono rispettivamente (l, m n) e (l', m',n') si
ha :
r e r' sono parallele
se e solo se
rk l
l'
15
m
m'
n =1
n'
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
r e r' sono perpendicolari
se e solo se
ll' + mm' + nn' = 0 .
Dimostrazione.
L'enunciato è una conseguenza immediata del fatto che r, r' sono parallele o perpendicolari se e
solo se lo sono i loro vettori direzione.
3.5 Posizioni reciproche di retta e piano.
Consideriamo ora tutti i casi che si possono presentare considerando la retta e il piano e le loro
posizione relativa.
Definizione 3.6
Dati nello spazio una retta r e uno piano π, si dice che π è parallelo ad r o, equivalentemente, che
r è parallela a π, e si scrive r // π, ossia π // r, se r è contenuta in π oppure se r e π non hanno punti
in comune. In breve:
r ∩=∅ .
r // π se e solo se r ⊂
oppure
Se π e r non sono paralleli, allora si dicono incidenti, ed hanno uno ed un sol punto in comune.
Proposizione 3.7
Consideriamo una retta r e un piano π rispettivamente di equazioni cartesiane:
ax + by + cz + d = 0
r
π:
a'x + b'y + c'z + d = 0
1) r e π sono paralleli se e solo se:
a
r a'
a''
b
b'
b''
a''x + b''y + c''z + d'' = 0
c
c ' =2
c' '
O, equivalentemente, se si ha:
a''l + b''m + c''n = 0 , dove (l, m, n) è un vettore direttore della retta r.
Se la 1) è soddisfatta allora r e π possono paralleli e disgiunti, oppure r essere contenuta in π ,
a seconda che per la matrice del sistema tra piano e retta si abbia:
r
a
b
c
a' b' c'
a' ' b' ' c ''
d
d'
d ''
= 3 (nessuna soluzione) ; oppure = 2 (infinite soluzioni).
2) Se r e π non sono paralleli, allora sono incidenti ed r ∩ consiste di un solo punto; ciò
avviene se e solo se:
16
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
a
r a'
a''
b
b'
b''
c
c ' =3
c' '
(il sistema ha un'unica soluzione).
O, equivalentemente, se si ha:
a''l + b''m + c''n diverso da 0 , dove (l, m, n) sia il vettore direttore della retta r.
Retta e piano perpendicolari.
Un caso particolare di incidenza si ha quando la retta ed il piano siano perpendicolari.
Definizione 3.8
Si dice che una retta r è perpendicolare ad un piano π (e si scrive r ⊥ ) se la retta ed il piano
si intersecano in un punto, diciamolo S, ed inoltre la retta r contiene un vettore ST
perpendicolare a π .
Teorema 3.9
Data una retta r il cui vettore direttore sia (l, m, n), ed un piano π di equazione:
ax + by +cz + d = 0,
si ha:
a b c =1.
r ⊥ se e solo se: rank
l m n
Dimostrazione.
Denotiamo con r0 la retta parallela ad r e passante per l'origine e consideriamo i punti:
S = (l, m, n) , P = (a, b, c),
allora:
r ⊥ se e solo se r 0 ⊥0
se e solo se
ed OS
sono allineati .
OP
Ciò equivale a dire che i vettori (a, b, c) ed (l, m, n) , in R3, sono linearmente dipendenti, da
cui la tesi.
17
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
Piano parallelo a due rette date.
Proposizione 3.10
Siano date nello spazio due rette r e r', non parallele, di parametri direttori rispettivamente l, m, n
ed l', m', n', ed un punto arbitrario P0 = (x0, y0, z0); allora esiste uno ed un solo piano π passante
per P0 e parallelo ad r ed r', la cui equazione cartesiana è data da :
x−x 0
det
l
l'
y− y 0 z −z 0
m
n =0 .
m'
n'
Dimostrazione.
Denotiamo con r0, r'0 rispettivamente, le rette parallele ad r, r' e passanti per l'origine e
consideriamo i punti R = (l, m, n) ∈ r0, R' = (l', m', n') ∈ r'0 .
Osserviamo che, essendo per ipotesi le rette r, r' non parallele, i punti O = (0, 0, 0), R = (l, m, n),
R' = (l', m', n') non sono allineati. Pertanto esiste uno e un solo piano che li contiene, ossia uno e un
solo piano, diciamo π0, contenente le rette r0, r'0 (parallele rispettivamente a r, r' e passanti per
l'origine); π0 ha equazione (vedi Corollario 2.3):
x
det l
l'
y
m
m'
z
n =0
n'
E' chiaro che π0 è l'unico piano passante per l'origine e parallelo a r, r'. Allora il piano π che passa
per P0 ed è parallelo a π0, conterrà le rette e sarà il piano cercato. Poiché il piano di equazione:
x−x 0
det
l
l'
y− y 0 z −z 0
m
n =0
m'
n'
soddisfa a tali requisiti (passa per P0 ed è parallelo a π0), la proposizione è dimostrata.
*
Corollario 3.11
Date nello spazio due rette sghembe r ed r', rispettivamente di parametri direttori l, m, n ed
l', m', n' , esistono e sono univocamente determinati due piani paralleli π, π' tali che :
1) π contenga r e sia parallelo ad r';
2) π' contenga r' e sia parallelo ad r.
Dimostrazione.
Possiamo osservare innanzitutto che se un piano è parallelo ad una retta e contiene un punto di
essa allora contiene tutta la retta. Per determinare π basterà quindi applicare la Proposizione 3.10
considerando un punto P0 = (x0, y0, z0) appartenente alla retta r , mentre per determinare π'
considereremo un punto P'0 = (x'0, y'0, z'0) su r'.
*
18
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
Fasci di piani
Definizione 3.12
i Data una retta r dello spazio, si chiama fascio (o anche fascio proprio) di piani di asse r,
l'insieme di tutti i piani dello spazio che contengono r.
i Dato un piano π, si chiama fascio improprio di piani individuato da π, l'insieme di tutti i piani
dello spazio paralleli a π.
Proposizione 3.8
Siano dati nello spazio tre piani distinti π, π', π'', di equazione, rispettivamente:
π: ax + by +cz + d = 0
Allora si ha:
π': a'x + b'y +c'z + d' = 0
π, π', π'', appartengono ad uno stesso fascio
(proprio o improprio)
π'': a''x + b''y +c''z + d'' = 0
se e solo se
19
a
r a'
a''
b
b'
b''
c
c'
c' '
d
d ' ≤2 .
d''
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
Dimostrazione.
Si ha che i tre piani passano per una retta comune se e solo se il sistema dato dalle loro tre
equazioni ha ∞1 soluzioni, ed in tal caso si avrà:
a
r a'
a''
b
b'
b''
c
c'
c' '
a
= r a'
a' '
b
b'
b' '
c
d
c' d ' = 2 .
c' ' d ' '
Si ha invece che i tre piani sono paralleli se e solo se:
a
r a'
a''
b
b'
b''
c
c'
c' '
= 1 .
In tal caso avremo sicuramente che il rango della matrice completa è ≤2 .
Viceversa, se il rango della matrice completa è ≤2 , necessariamente siamo in uno dei due
casi descritti sopra.
Osservazione 3.9
Si può introdurre la nozione generale di fascio di piani individuato da due piani distinti π, π', di
equazione, rispettivamente:
π: ax + by +cz + d = 0 ,
π': a'x + b'y +c'z + d' = 0
definito come l'insieme di tutti i piani dello spazio la cui equazione cartesiana può essere espressa
come una combinazione lineare delle equazioni di π, π':
l(ax + by +cz + d) + m (a'x + b'y +c'z + d' ) = 0.
Si può notare che quando i due piani non sono paralleli, si ottiene il fascio (proprio) di piani che
contengono la retta ∩' ; se invece i due piani sono paralleli, allora (a',b',c') = k(a,b,c) ,
quindi si ottiene nell'equazione dei piani del fascio:
l(ax + by +cz + d) + m (kax + kby +kcz + d') = (l+mk)ax + (l+mk)by +(l+mk)cz + ld+d'= 0,
e quindi piani paralleli a π (ed a π').
Esercizio:
Data la retta di equazioni cartesiane:
r=
∣
{
3 x− y z=0
x−2 y−z1=0
, trovare il piano contenente r e
passante per il punto P = (-1, -1, 17).
I piani contenenti r sono dati dal fascio:
l 3 x− y zm x−2 y−z1=0 .
Imponendo il passaggio per P si ottiene: l(-3+1+17)+m(-1+2-17+1) = 0, e quindi 15l - 15m = 0,
ed l = m. Sostituendo nell'equazione del fascio: m3 x− yz m x−2 y−z 1=0 , e perciò
(ponendo m=1):
3 x− yz x−2 y−z1=0 , da cui 4 x−3y1=0 , che sarà il piano cercato.
20
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
4. Il prodotto vettoriale.
Introduciamo adesso una nuova operazione in VO3 che può essere utile in vari problemi
geometrici.
Si tratta di un'operazione da V 3O ×V 3O in VO3 che chiameremo prodotto vettoriale:
, e si
Dati due vettori v , w
∈ V 3O , si dice prodotto vettoriale di v per w
, il vettore di V03 definito così:
indica con v ∧ w
è: ∣v ∧ w
∣ = ∣v∣.∣w
∣sin (ove è l'angolo convesso fra v , w
);
- il modulo di v ∧ w
è data dalla retta perpendicolare a v e w
;
- la direzione di v ∧ w
è dato dalla “regola della mano destra”: ponendo la mano destra di taglio su
- il verso di v ∧ w
v
in modo che piegando le dita esse vadano in direzione di w
, il pollice indicherà il verso di
v ∧ w
.
Definizione:
si ha che v ∧ w
Notiamo che dalla definizione del modulo di v ∧ w
=0 se i due vettori sono
paralleli (cioè se = oppure =0 ), oppure se uno di essi è nullo.
potrebbe apparire che essa sia manchevole, in quanto
Nella definizione della direzione di v ∧ w
siano paralleli non è determinata un'unica retta che sia perpendicolare ad
nel caso in cui v e w
sono paralleli, si ha che v ∧ w
entrambi, ma il problema non si pone in quanto se v e w
=0 ,
e quindi non è necessario definirne né la direzione né il verso.
Nella seguente proposizione si elencano le proprietà fondamentali del prodotto vettoriale, che si
possono dedurre dalla sua definizione:
Proposizione 4.1
in VO3, per il loro prodotto vettoriale valgono le seguenti proprietà:
Dati due vettori v e w
a)
v ;
v ∧ w
= −w
∧
b)
v1∧ v2 v3 =v1∧v 2v 1∧ v3 ;
c) v1∧ v2= v1∧v2 =v1∧ v2 , ∀ ∈ℝ ;
21
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
L'utilità del prodotto vettoriale è in primo luogo il fatto che dati due vettori ne fornisce un terzo
ortogonale ad entrambi; tuttavia perché esso sia utilizzabile in problemi di geometria analitica dello
spazio abbiamo bisogno di averne una “versione in ℝ 3 “, in quanto vogliamo sfruttare il metodo
delle coordinate (come abbiamo fatto per il prodotto scalare) per poter agevolmente “fare i conti”
con i vettori traducendoli come elementi di ℝ3 .
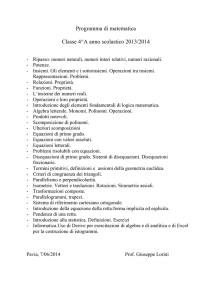
Consideriamo come sempre un sistema di riferimento cartesiano ortogonale Oxyz in V03;
cioè fissiamo in V03 tre vettori ortogonali i , j ,
k di modulo 1 , come in figura:
Notiamo che si ha:
i ∧j =
k ,
i ∧k =−j , j∧k =i .
Osservazione: Nella scelta della base i , j ,
k , conta anche che essi siano posizionati come in
figura, perché se ad esempio invertissimo le posizioni di due di essi, anche i segni dei prodotti
vettoriali cambierebbero.
∈V 3O si scriverà, in modo unico, nella forma: OP=
x i y j z
k ;
Ogni vettore OP
allora, se abbiamo due vettori
e
,
varrà:
w
v =OP =a i b jc k
=OQ=a ' i b ' jc ' k
∧OQ=a
i b jc
k ∧a ' i b ' jc '
k =
v ∧ w
=OP
= ab '
k −ac ' j −ba '
k bc ' i ca ' j−cb ' i =
bc ' −cb ' i ca ' −ac ' jab ' −ba '
k .
Possiamo adesso “tradurre” l'operazione di prodotto vettoriale anche come una operazione in
ponendo:
ℝ3 ,
3
∀ a , b , c ,a ' , b ' , c ' ∈ℝ : a , b , c ∧ a ' ,b ' , c ' =bc '−cb ' , ca ' −ac ' , ab '−ba ' .
Esempi:
2,1 ,0∧1,−1,1=1,−2,−3 ,
1,0,0 ∧0,0 ,2=0,−2,0 .
Un modo per memorizzare la formula del prodotto vettoriale è quello di esprimerla in forma determinantale:
22
Università di Bologna - C.d.S. Ingegneria Gestionale – Geometria e Algebra – Prof. Gimigliano
a , b , c∧a ' , b ' , c ' =bc ' −cb ' , ca '−ac ' , ab ' −ba ' = det
i
a
a'
j
b
b'
k
c
c'
.
Notare che il determinante scritto qui sopra è “finto” , in quanto non si tratta di una vera e propria matrice
(la prima riga ha per elemeni dei vettori non dei numeri); però la formula del determinante applicata a questa
“finta matrice” dà un utile modo di ricordare la formula del prodotto vettoriale.
Applicazioni:
- Se abbiamo una retta in forma cartesiana:
r
ax + by + cz + d = 0
a'x + b'y + c'z + d = 0
e vogliamo un suo vettore direzionale, consideriamo che i due vettori (a,b,c) e (a',b',c') sono perpendicolari
ai due piani che definiscono la retta, e quindi sono anche perpendicolari ad r ; si ha allora che un vettore
perpendicolare ad essi sarà parallelo alla retta (quindi utilizzabile come suo vettore direzionale).
Avremo così che il vettore:
a , b , c∧a ' , b ' , c ' =bc ' −cb ' , ca '−ac ' , ab ' −ba '
è un vettore direzionale per r .
- Se abbiamo due rette non parallele:
x=l tx 0
y=mt y 0
z=nt z 0
x=l ' t x 1
y=m' t y 1
z =n ' tz 1
e vogliamo un piano ax+by+cz+d = 0, parallelo ad entrambe, dovremo avere che il vettore (a,b,c)
sia perpendicolare ad entrambe le rette; potremo prendere allora:
a , b , c=l , m , n∧ l ' , m ' , n '
ed avremo un piano come desiderato (naturalmente d può essere qualsiasi).
23