Diagrammi di Bode e polari
CONTROLLI AUTOMATICI
Ingegneria Meccatronica
•
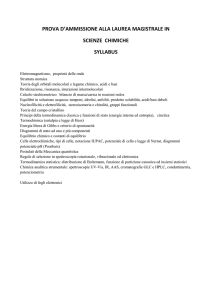
Problema della rappresentazione grafica di funzioni complesse di variabile reale del tipo:
Nyquist Diagram
Im{F(ω)}5000
4000
http://www.automazione.ingre.unimore.it/pages/corsi/Automazione%20Industriale.htm
3000
Imaginary Axis
2000
DIAGRAMMI DI BODE
1000
Re{F(ω)}
0
arg{F(ω)}
-1000
|F(ω)|
-2000
Tre possibili rappresentazioni!
-3000
ω
-4000
Ing. Luigi Biagiotti
Tel. 051 20939903
-5000
-2000
Bode Diagram
70
50
ω
Phase (deg)
0
-1
10
0
10
1
2
10
10
Frequency (rad/sec)
3
10
60
10
Si considerano logaritmi naturali. Da
-80
-60
-40
-20
0
Open-Loop Phase (deg)
20
40
DBode -- 2
segue che i diagrammi α e β rappresentano rispettivamente la parte reale e la parte
immaginaria del logaritmo naturale della risposta armonica in funzione del logaritmo
naturale della pulsazione ω.
diagramma delle ampiezze o dei moduli o diagramma α, che riporta il
logaritmo del modulo della risposta armonica;
Bode Diagram
40
Magnitude (dB)
Esempio
Poiché la funzione di risposta armonica ha valori complessi, si hanno due
diversi diagrammi:
30
20
10
0
-10
-20
0
Phase (deg)
diagramma delle fasi o degli argomenti o diagramma β, che riporta
l'argomento della risposta armonica.
entrambi sono in funzione del logaritmo della pulsazione ω.
-45
-90
-1
10
DBode -- 3
arg{F(ω)}
φ(ω)
Controlli Automatici
•
Controlli Automatici
45
5
10
Diagrammi di Bode
Luigi Biagiotti
ω
4
Diagrammi di Bode
•
12000
55
Luigi Biagiotti
•
10000
|F(ω)|
50
Fra questi sono di largo impiego i diagrammi di Bode o diagrammi logaritmici
di risposta armonica.
8000
65
-45
-90
-2
10
La rappresentazione grafica della funzione di risposta armonica viene
effettuata con speciali diagrammi, che costituiscono la base dei
procedimenti grafici per la sintesi delle reti correttrici nel dominio delle
frequenze.
4000
6000
Real Axis
ω
75
40
45
http://www-lar.deis.unibo.it/~lbiagiotti
2000
Nichols Chart
|F(ω)|
60
arg{F(ω)}
e-mail: [email protected]
0
80
70
Open-Loop Gain (dB)
Magnitude (dB)
|F(ω)|80
Luigi Biagiotti
0
10
1
2
3
10
10
10
Controlli AutomaticiFrequency (rad/sec)
4
10
5
10
DBode -- 4
Diagrammi di Bode
Diagrammi di Bode
E’ comodo l’uso dei logaritmi perché valgono le seguenti proprietà per i numeri complessi e
per i logaritmi.
Proprietà numeri complessi
Per un più agevole tracciamento dei diagrammi spesso si usa la scala logaritmica.
Si può usare:
Proprietà logaritmi
Una doppia scala logaritmica per le
ampiezze e scala semilogaritmica per le
fasi
Dati quindi (a, b, c, … q) complessi e (k, …, q) interi si ha che
10
40
1
0
Controlli Automatici
DBode -- 5
Diagrammi di Bode
10
0
1
2
10
10
Diagrammi di Bode
10
3
10
30
20
10
0 -1
10
4
0
0
-20
-20
argG(j ω)
argG(j ω)
10 -1
10
-40
-60
-80
-100 -1
10
Luigi Biagiotti
Diagrammi di Bode
2
|G(j ω)| (db)
|G(j ω)|
10
Una scala semilogaritmica sia per le
ampiezze sia per le fasi: in questo caso la
scala delle ampiezze è graduata in decibel
(db).
10
0
1
10
ln(ω)
2
10
[rad/sec]
10
3
Luigi Biagiotti
10
4
10
0
10
1
10
2
10
3
10
4
-40
-60
-80
-100 -1
10
10
Controlli Automatici
0
1
10
ln(ω)
2
10
[rad/sec]
10
3
10
4
DBode -- 6
Diagrammi di Bode
•
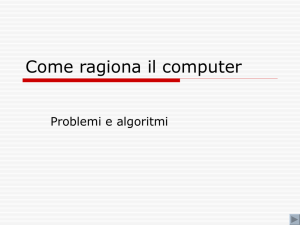
Il decibel è un'unità logaritmica convenzionale che normalmente si impiega per esprimere il
guadagno di amplificatori (quindi una grandezza adimensionale).
•
Un amplificatore di guadagno A (rapporto fra le ampiezze del segnale di uscita e del segnale di
ingresso) si dice anche che ha un guadagno di B db, con
•
La fase si può riportare in gradi o in radianti.
•
Per eseguire la conversione in decibel e viceversa,
può risultare utile il grafico a lato,
ottenuto esprimendo la quantità A mediante la
cosiddetta notazione scientifica:
•
Possibilità di rappresentare col dovuto dettaglio grandezze che variano in campi
notevolmente estesi;
•
Possibilità di sommare i diagrammi relativi a sistemi in cascata, per ottenere il
diagramma del sistema complessivo: infatti la risposta armonica complessiva si ottiene
eseguendo il prodotto delle singole risposte armoniche, cioè eseguendo il prodotto delle
ampiezze (che, impiegando una scala logaritmica, si riconduce ad una somma) e la
somma delle fasi;
•
Possibilità di costruire i diagrammi relativi ad una funzione di risposta armonica data in
forma fattorizzata come somma di diagrammi elementari, di un numero limitato di tipi
fondamentali, corrispondente ciascuno ad un singolo fattore.
1
r
10
I vantaggi che si hanno impiegando la scala logaritmica sono:
e considerando che la medesima quantità in
decibel è espressa da
10
Luigi Biagiotti
0
0
2
Controlli Automatici
4
6
8
10
s
12
14
16
18
20
DBode -- 7
Luigi Biagiotti
Controlli Automatici
DBode -- 8
Diagrammi di Bode
Diagrammi di Bode
•
Si prenderà in esame ora, in particolare, questo ultimo punto. Sia data
Moltiplicando fra loro i fattori corrispondenti a coppie di zeri e poli complessi coniugati,
in modo che i coefficienti risultino tutti reali, e operando opportune posizioni, si ottiene
o, in forma fattorizzata:
che equivale alla forma con costanti di tempo
•
Il fattore sh corrisponde ad un eventuale polo nell'origine avente ordine di
molteplicità h: se la funzione di trasferimento non presenta poli nell'origine, è
h=0.
•
Nei casi di interesse nell'ambito dei controlli automatici l'amplificazione
comprende di regola la frequenza zero, cioè la frequenza zero o componente
continua rientra nella banda passante della catena, per cui si esclude la
presenza di uno zero nell'origine.
Luigi Biagiotti
Controlli Automatici
DBode -- 9
Diagrammi di Bode
in cui è
Luigi Biagiotti
Controlli Automatici
DBode -- 10
Diagrammi di Bode
Ponendo s = j ω, si ottiene la seguente espressione della funzione di risposta armonica
La costante K è detta costante di guadagno.
•
Per h = 0, essa rappresenta il guadagno statico, cioè il valore della funzione di risposta
armonica per ω= 0
•
Per h = 1, la costante K si chiama anche costante di velocità
•
Per h = 2, la costante K si chiama anche costante di accelerazione
•
Si è ottenuto
•
Se si tracciano i diagrammi di Bode, delle ampiezze e delle fasi, corrispondenti a
funzioni elementari dei tipi:
è possibile, sommandoli, ottenere il diagramma di Bode della funzione complessiva.
Luigi Biagiotti
Controlli Automatici
DBode -- 11
Luigi Biagiotti
Controlli Automatici
DBode -- 12
Diagrammi di Bode
Diagrammi di Bode
1. G(jω)=K
2. G(j ω)=(j ω)-h
Essendo:
Costante K positiva
10
|k|>1
Per un generico valore di h:
• il diagramma delle ampiezze è una retta passante per l'origine di inclinazione –h,
• il diagramma delle fasi è identicamente uguale a –h π/2.
5
0
|k|<1
-5
-10 -1
10
0
1
10
2
10
10
Costante K negativa
20
k>0
-50
-100
k<0
-150
|1/(jω)2| (db)
0
10
0
-10
-20
-30
-40 -1
10
-200
10
0
10
1
2
10
10
[rad/sec]
DBode -- 13
0
-10
-20
-30
-40 -1
10
2
-50
-100
-150
-200
-250
10
0
ln(ω)
Controlli Automatici
10
10
0
10
1
Luigi Biagiotti
10
1
10
2
-50
-150
-200
-250
-300 -1
10
[rad/sec]
10
0
ln(ω)
10
1
Controlli Automatici
3. G(jω)= (1+j ω τ)± 1.
E’ molto utile, per le costruzioni grafiche, impiegare diagrammi di Bode
approssimati a forma di spezzata.
Sia data:
DBode -- 14
Diagrammi approssimati a spezzata
Per il diagramma delle ampiezze si impiega l'approssimazione asintotica (la
spezzata costituita dai due asintoti cui tende il diagramma per ω Æ 0 e per ω
Æ ∞), infatti:
Diagrammi di Bode
Diagrammi di Bode
|(1+jωτ)| (db)
0
-10
-20
-30
-40
-50
10
0
10
1
10
arg(1+j ωτ)
-40
-60
-80
10
0
ln(ω)
Luigi Biagiotti
10
1
10
2
Per ω ¿ 1/ τ (ω2 τ2 ¿ 1), si ottiene α ≈ 0, cioè il diagramma viene a
coincidere con l'asse delle ascisse.
•
Per ω À 1/τ (1 ¿ ω2 τ2), si ha
50
40
30
20
10
10
0
10
1
10
2
100
0
•
60
0 -1
10
2
-20
-100 -1
10
2
G(j ω) = (1 + j ωτ)-1:
I corrispondenti diagrammi di Bode sono i seguenti:
-60 -1
10
10
[rad/sec]
Diagrammi di Bode –
Nel caso di
2
-100
Diagrammi di Bode
Diagrammi di Bode di termini del primo ordine.
10
0
-300 -1
10
|1/(1+jωτ)| (db)
1
arg(1/(j ω2))
0
10
ln(ω)
Luigi Biagiotti
10
0
arg(1/(j ω))
-250
-1
10
arg(1/(1+j ωτ))
Diagrammi di Bode
Diagrammi di Bode
20
Cambia il diagramma delle fasi,
che è identicamente uguale a -π.
|1/(jω)| (db)
•
i diagrammi di Bode hanno l'andamento rappresentato in figura (per h =1, 2).
15
|K| (db)
I diagrammi di Bode delle
ampiezze hanno l'andamento
rappresentato in figura;
il diagramma delle fasi è
identicamente nullo.
Diagrammi di Bode
arg(K)
•
•
Il diagramma viene a coincidere con la retta passante per il punto ln ω = ln
(1/τ) e di inclinazione -1 (o -20 db/decade). L'approssimazione asintotica del
diagramma delle ampiezze è pertanto costituita dalle due semirette
80
60
40
20
0 -1
10
[rad/sec]
Controlli Automatici
10
0
ln(ω)
10
1
10
2
[rad/sec]
DBode -- 15
Luigi Biagiotti
Controlli Automatici
DBode -- 16
Diagrammi di Bode –
Diagrammi approssimati a spezzata
L'errore massimo di questa approssimazione si ha per ω = 1/τ e vale
Diagrammi di Bode –
Diagrammi approssimati a spezzata
Anche il diagramma delle fasi può essere approssimato con la spezzata che si
ottiene collegando i due asintoti β = 0 e β = -π/2 con la tangente al diagramma
nel punto corrispondente alla pulsazione ω0 = 1/τ, in cui è β = π/4.
fase
10
Diagrammi di Bode
gradi
0
20
-10
-20
15
-30
10
|1/(1+jω)| (db)
-40
5
-50
-60
0
-70
-5
-80
-10
-90
-15
-100 -1
10
-20 -1
10
Luigi Biagiotti
10
Controlli Automatici
Diagrammi di Bode –
0
10
0
1
10
10
rad/sec
1
DBode -- 17
Diagrammi approssimati a spezzata
Luigi Biagiotti
Diagrammi di Bode –
•
Da
Controlli Automatici
DBode -- 18
Diagrammi approssimati a spezzata
Ricapitolando
ampiezza
si può scrivere
20
Pendenza 0
Pendenza -1 (-20 dB/decade)
10
db
le pulsazioni ωa e ωb si determinano, in funzione della pulsazione corrispondente al “punto di
rottura” del diagramma asintotico delle ampiezze, mediante la relazione
0
-10
-20 -1
10
da cui
L'impiego delle approssimazioni asintotiche è vantaggioso perché, nell'eseguire la somma dei
diversi diagrammi elementari, basta determinare le ordinate in corrispondenza dei vertici della
spezzata, cioè in corrispondenza delle pulsazioni di rottura di ciascuno dei diagrammi elementari.
gradi
0o
0
10
1
fase
10
-10
-30
-50
-70
-90
-110 -1
10
-90o
Controlli Automatici
DBode -- 19
Luigi Biagiotti
1
0
10
rad/sec
10
ωb = ω0 * 4.81
ωa = ω0 / 4.81
Luigi Biagiotti
10
1/τ
Controlli Automatici
DBode -- 20
Diagrammi di Bode –
Diagrammi di Bode - Esempio
Diagrammi approssimati a spezzata
Si sono visti i casi relativi alle funzioni (per valori τ > 0):
db
ampiezza
Per valori della costante di tempo τ < 0 in entrambi i casi:
40
20
il diagramma delle ampiezze risulta immutato, con il punto di rottura per ω = 1/|τ|,
il diagramma delle fasi risulta ribaltato rispetto all'asse delle ascisse.
0
-20
-40
-60 -2
10
-1
0
10
10
1
10
gradi
fase
2
10
rad/sec
100
60
20
-20
-60
-100 -2
10
Luigi Biagiotti
Controlli Automatici
DBode -- 21
Diagrammi di Bode
Luigi Biagiotti
-1
10
0
10
Controlli Automatici
1
10
2
10
rad/sec
DBode -- 22
Diagrammi di Bode
Asintoti del diagramma α:
•
Per ω/ωn ¿ 1,
•
Per ω/ωn À 1, prevale il termine (ω/ωn)4 e pertanto
Diagrammi di Bode del termine del secondo ordine
•
05δ<1
Se fosse δ = 1, le radici non sarebbero complesse coniugate e il termine di
secondo grado sarebbe il prodotto di due termini di primo grado.
Eventualmente δ < 0: caso considerato a parte.
Analogamente al caso dei termini di primo ordine, si fa riferimento in un primo
tempo all'esponente -1: data la natura logaritmica dei diagrammi, se l'esponente
valesse +1 basterebbe ribaltare entrambi i diagrammi di Bode attorno all'asse delle
ascisse. Per tale valore dell'esponente si può scrivere
Luigi Biagiotti
Controlli Automatici
DBode -- 23
In questo caso il diagramma effettivo può discostarsi sensibilmente da quello
asintotico: in particolare, per δ = 0 e in corrispondenza della pulsazione di
rottura ωn, lo scostamento è infinito.
Luigi Biagiotti
Controlli Automatici
DBode -- 24
Diagrammi di Bode
Diagrammi di Bode
Il diagramma delle ampiezze ha le seguenti proprietà:
•
Andamento del diagramma delle ampiezze per diversi valori di δ.
2
•
Per
la curva presenta un massimo;
10
•
Per
la curva interseca l'asse delle ascisse a
destra del punto ω = ωn ed è pertanto
tutta al di sopra della sua
approssimazione asintotica;
10
•
Per
|G(j ω)|
•
la curva interseca l'asse delle ascisse a
sinistra del punto ω = ωn;
Per
δ = 0.001
1
δ = 0.5
0
10
δ=1
la curva non interseca l'asse delle
ascisse ed è pertanto tutta al di sotto
della sua approssimazione asintotica.
-1
10
-2
10
0
10
Luigi Biagiotti
Controlli Automatici
DBode -- 25
Luigi Biagiotti
1
10
ln(ω)
2
10
Controlli Automatici
DBode -- 26
Diagrammi di Bode
Diagrammi di Bode
Picco di risonanza, Pulsazione di risonanza
•
Per il calcolo di MR e ωR conviene, per semplicità, porre u = ω/ωn.
•
Il massimo dell'ampiezza corrisponde quindi ad un minimo della funzione
•
Derivando e uguagliando a zero la derivata, si ottiene
•
Il picco di risonanza MR è il valore massimo assunto dal diagramma delle
ampiezze.
•
La pulsazione di risonanza ωR è la pulsazione alla quale esso si verifica.
2
10
1
|G(jω)|
10
0
10
picco di risonanza
δ = 0.001
δ = 0.5
δ= 1
pulsazione di risonanza
-1
10
-2
10 0
10
Luigi Biagiotti
1
10
ln(ω)
Controlli Automatici
2
10
DBode -- 27
Luigi Biagiotti
Controlli Automatici
DBode -- 28
Diagrammi di Bode
Diagrammi di Bode
•
Si è ottenuto
Diagramma delle fasi
• Anche il diagramma delle fasi varia in funzione di δ.
•
Noto il valore di ωR, si calcola il valore dell'ampiezza alla risonanza, cioè del picco
di risonanza MR, come il modulo della funzione di risposta armonica per ω = ωR. Si
ricava:
δ = 0.5
δ = 0.1
δ=0
0
-20
-40
arg[G(jω)]
9
8
7
6
MR
Andamento del picco di risonanza MR
in funzione del coefficiente di
smorzamento δ.
-80
-100
-120
5
-140
4
3
-160
2
-180
1
00
Luigi Biagiotti
δ=1
-60
10
0
10
0.2
Controlli Automatici
0.4
δ
0.6
0.8
DBode -- 29
1
Luigi Biagiotti
1
10
ln(ω)
Controlli Automatici
2
10
DBode -- 30
Diagrammi di Bode
Diagrammi di Bode
•
Per quanto riguarda l'approssimazione asintotica, si può ottenere congiungendo gli
asintoti β = 0 e β = -π con un segmento inclinato come la tangente al diagramma
effettivo in corrispondenza della pulsazione di rottura.
•
Le pulsazioni ωa e ωb sono legate alla pulsazione di rottura ωn dalla relazione
•
Si ottiene una famiglia di diagrammi, ciascuno per un diverso valore di δ.
•
dalla quale si ottiene
•
Per il calcolo dell'approssimazione asintotica, essendo
•
cioè
si deduce
Luigi Biagiotti
Controlli Automatici
DBode -- 31
Luigi Biagiotti
Controlli Automatici
DBode -- 32
Diagrammi di Bode
Diagrammi di Bode
• La pulsazione naturale ωn, uguale al modulo delle radici complesse coniugate
cui corrisponde il termine del secondo ordine, non è mai negativa
ωn > 0
•
sempre
Il coefficiente di smorzamento δ può essere invece negativo:
δ<0
In questo caso:
• il diagramma delle ampiezze è uguale a quello che si avrebbe per uno
smorzamento pari a |δ|
In pratica, per determinare sulla scala logaritmica la pulsazione omegaa (oppure la ωb) in
rapporto alla ωn, basta:
•
riportare su una striscia di carta la distanza, presa sulla scala stessa, fra il punto di
ascissa 1 e quello di ascissa 4.81
•
moltiplicare la lunghezza del segmento così ottenuto per δ (ad esempio, se è δ = 0.5, si
assume una distanza paria metà del segmento ottenuto).
Luigi Biagiotti
Controlli Automatici
•
DBode -- 33
Luigi Biagiotti
Diagrammi di Bode
•
il diagramma delle fasi risulta ribaltato rispetto all'asse delle ascisse.
Controlli Automatici
DBode -- 34
Diagrammi di Bode
1
Caso con δ < 0
•
10
Diagrammi di Bode per il termine di
secondo ordine
δ
0
Diagramma delle ampiezze:
10
|G(j ω)|
non cambia
-1
10
0
δ
-20
-40
-2
0
10
1
2
10
ln( ω )
-60
10
arg[G(j ω)]
10
Diagramma delle fasi:
ribaltato attorno all’asse
-80
-100
-120
-140
-160
δ = 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 1, 1.2, 1.5, 2
-180
10
Luigi Biagiotti
Controlli Automatici
DBode -- 35
Luigi Biagiotti
0
Controlli Automatici
1
10
ln( ω)
10
DBode -- 36
2
Diagrammi di Bode
2
•
10
Diagrammi di Bode
• Ritardo
Diagrammi di Bode per il termine di
secondo ordine
1
10
|G(j ω)|
•
la funzione di risposta armonica ha modulo identicamente unitario e fase
crescente linearmente con la frequenza.
0
10
δ
180
•
160
-1
0
1
10
10
120
arg[G(j ω)]
Picco di attenuazione
Per ricavare i diagrammi di Bode, si scrive
140
2
10
ln( ω)
Si ribaltano attorno all'asse delle
ascisse i diagrammi ottenuti per
100
dalla quale si deduce che il diagramma delle fasi ha un andamento
esponenziale.
80
60
40
δ
20
0
10
Luigi Biagiotti
0
1
10
ln( ω)
Controlli Automatici
10
2
DBode -- 37
Luigi Biagiotti
Diagrammi di Bode
N
2
10
|G(j ω)|
Controlli Automatici
DBode -- 38
Esempio: Altoparlante magnetico
Andamento dei diagrammi di Bode del ritardo
Funzione di trasferimento del sistema
(dall’ingresso , all’uscita ):
S
0
10
N
-2
10
0
10
1
10
2
ln( ω)
10
•
t0
-100
•
•
•
•
•
•
t0 = 0.1 sec
-200
-300 0
10
Luigi Biagiotti
3
10
0
arg[G(j ω)]
10
Essendo
t0 = 0.2 sec
1
10
2
ln( ω)
10
Controlli Automatici
t0 = 0.5 sec
3
10
DBode -- 39
Induttanza bobina
Resistenza bobina
Costante di forza bobina
Massa del cono
Costante elastica sospensione
Coefficiente attrito cono nell’aria
Costante velocità cono/
potenza acustica
Luigi Biagiotti
Mappa poli/zeri:
Controlli Automatici
Zero nell’origine
Poli meccanici
Polo elettrico
DBode -- 40
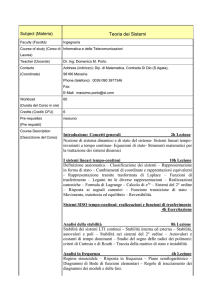
Esempio: Altoparlante magnetico
Esempio: Altoparlante magnetico
Il sistema esaminato risulta essere un “passa banda”, ovvero solo le armoniche comprese
in un certo intervallo frequenziale vengono trasferite in uscita senza attenuazione in
ampiezza (a meno di una costante e con sfasamenti trascurabili)
Bode Diagram
20
Curva
normalizzata
Magnitude (dB)
0
Magnitude (dB)
-20
-40
-60
Phase (deg)
-80
90
intervallo di frequenze in cui il
diagramma di Bode delle ampiezze
è compreso tra [-3, 3] dB
(in generale compreso in una fascia
ampia 6 dB centrata sul valore
massimo)
-5
-10
-20
90
0
45
Phase (deg)
-90
-1
10
•
Banda passante:
0
-15
-180
•
Bode Diagram
5
0
10
1
2
10
10
3
10
4
10
5
10
6
-90
10
Frequency (rad/sec)
La presenza dello zero nell’origine mette in luce che le componenti continue non
vengono “trasferite” (senso fisico)
Le frequenze elevate non vengono trasferite (senso fisico)
Luigi Biagiotti
0
-45
Controlli Automatici
DBode -- 41
Proprietà filtranti dei sistemi
-135
Classificazione sistemi
-180
0
10
1
10
2
10
3
10
4
10
Frequency (rad/sec)
banda passante
Luigi Biagiotti
Controlli Automatici
DBode -- 42
Proprietà filtranti dei sistemi
Passa Banda
Ogni sistema dinamico agisce sullo spettro delle frequenze in ingresso in modo selettivo. Molti sistemi di
interesse fisico possono essere classificati in base la tipo di azione filtrante
Elimina Banda
Passa Basso
Passa Alto
Banda passante
Luigi Biagiotti
Controlli Automatici
Banda passante
Banda passante
DBode -- 43
Luigi Biagiotti
Controlli Automatici
Banda passante
DBode -- 44
Spettri di segnali filtrati da sistemi lineari
Dalla definizione di funzione di risposta armonica, l’uscita a regime di un sistema lineare
asintoticamente stabile con funzione di risposta armonica F(ω), forzato da un ingresso con
spettro frequenziale UF(ω), è un segnale temporale il cui spettro YF(ω):
¾ ha le stesse componenti frequenziali di quello in ingresso (non vengono aggiunte
frequenze non presenti nello spettro di ingresso);
¾ ha un andamento che è quello dello spettro di ingresso “modulato” dall’andamento della
funzione di risposta armonica (| YF(ωi)| = |F(ωi)| |UF(ωi)|).
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
-0.2
-0.2
-0.4
-0.4
-0.6
-0.6
-0.8
-1
regime
spettro serie di Fourier
Luigi Biagiotti
-0.8
0
1
2
3
4
5
6
7
-1
20
8
21
22
23
24
25
26
27
28
29
30
spettro serie di Fourier
Controlli Automatici
DBode -- 45
Luigi Biagiotti
Controlli Automatici
DBode -- 46
1
Spettri di segnali filtrati da sistemi lineari
•
•
1
0.9
0.8
In realtà la proprietà dello spettro del segnale di uscita di essere quello del
segnale di ingresso “modulato” dalla funzione di risposta armonica non vale solo
per il segnale a regime ma bensì per l’andamento completo.
0.8
0.7
0.6
0.6
0.5
0.4
0.4
Ricordando le definizioni di serie di Fourier (segnale periodico) o trasformata di
Fourier (segnale qualsiasi)
0.3
0.2
0.2
0.1
0
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
250
0
0.2
0.4
0.6
0.8
1
1.2
Time (sec)
1.4
1.6
1.8
2
600
200
armoniche
0
700
500
150
400
peso del modulo della ka armonica
sfasamento della ka armonica
300
100
200
50
100
0
Luigi Biagiotti
Controlli Automatici
DBode -- 47
0
20
40
60
80
100
Frequency (rad/sec)
Luigi Biagiotti
120
140
160
0
0
10
Controlli Automatici
1
10
Frequency (rad/sec)
10
DBode -- 48
2
1
1
1
1
0.9
0.9
0.8
0.8
0.8
0.8
0.7
0.7
0.6
0.6
0.6
0.6
0.5
0.5
0.4
0.4
0.4
0.4
0.3
0.3
0.2
0.2
0.2
0.2
0.1
0
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
0
0.1
0
0
0.2
0.4
0.6
0.8
250
1
1.2
Time (sec)
1.4
1.6
1.8
2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
250
0
0
0.2
700
0.4
0.6
0.8
1
1.2
Time (sec)
1.4
1.6
1.8
2
700
600
200
200
600
500
500
150
150
400
400
100
300
100
300
200
200
50
50
100
100
0
0
20
40
60
80
100
Frequency (rad/sec)
Luigi Biagiotti
120
140
160
0
0
0
10
Controlli Automatici
10
1
10
DBode -- 49
CONTROLLI AUTOMATICI
Ingegneria Meccatronica
http://www.automazione.ingre.unimore.it/pages/corsi/Automazione%20Industriale.htm
Diagrammi di Bode
FINE
Ing. Luigi Biagiotti
Tel. 051 20939903
e-mail: [email protected]
http://www-lar.deis.unibo.it/~lbiagiotti
2
0
20
40
60
80
100
Frequency (rad/sec)
Luigi Biagiotti
120
140
160
0
0
10
Controlli Automatici
1
10
2
10
DBode -- 50