Introduzione ai problemi di controllo. Finalità del controllo automatico. Esempi di
problemi di controllo.
Tipologie ed elementi costitutivi dei sistemi di controllo.
Modelli funzionali e modelli matematici dei sistemi.
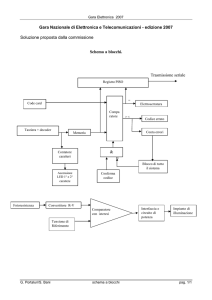
Rappresentazione a blocchi di un sistema; algebra degli schemi a blocchi.
Funzioni di trasferimento, descrizione dei sistemi nel dominio del tempo.
Trasformate ed anti trasformate di Laplace; proprietà.
Rappresentazioni analitiche delle funzioni di trasferimento: forme caratteristiche, poli e
zeri
Analisi di sistemi lineari mediante la teoria delle trasformate di Laplace
La retroazione; schemi a blocchi di sistemi retroazionati e calcolo della funzione di
trasferimento
Comportamento in transitorio dei sistemi: studio della risposta ai principali segnali
canonici di sistemi del I e II ordine e di sistemi con poli dominanti.
Studio del comportamento a regime: definizione degli errori.
Studio armonico: rappresentazione dei sistemi mediante diagrammi di Bode e di Nyquist.
Analisi della stabilità dei sistemi di controllo: criteri di stabilità di Bode e Nyquist;
margine di fase e di guadagno; dipendenza dalla funzione di trasferimento d’anello,
relazioni tra la risposta in frequenza e le risposte temporali.
Analisi e progetto di semplici sistemi di controllo, a partire da requisiti di stabilità,
precisione, insensitività ai disturbi, robustezza.
Reti di correzione in cascata: progetto di regolatori basato sul criterio di Bode: reti
anticipatrici, ritardatrici e a sella.
Regolatori industriali P, PI, PD, PID: caratteristiche ed utilizzo.
Struttura e descrizione dei sistemi di controllo digitale
Acquisizione, elaborazione e distribuzione dati.
Architettura dei sistemi
Condizionamento dei segnali
Campionamento, quantizzazione e codifica
Conversione analogico digitale e digitale analogico
Applicazioni del microcontrollore Arduino in semplici sistemi di
acquisizione/distribuzione
Uso di Matlab e Simulink per l’analisi e la simulazione dei sistemi dinamici e per il
progetto dei sistemi di controllo.