Università del Salento
FACOLTÀ DI SCIENZE MATEMATICHE, FISICHE E NATURALI
Corso di Laurea in Fisica
INTRODUZIONE ALLA FISICA MODERNA
ROSARIO ANTONIO LEO
Anno Accademico 2009/2010
INDICE
nozioni elementari. richiami
v
0.1 Punto materiale
v
0.1.1 Esempio: pendolo semplice
0.2 Sistemi di particelle
ix
vi
i meccanica analitica
1
1 principio di d’alembert ed equazioni di lagrange
2
1.1 Vincoli
2
1.1.1 Definizioni
2
1.1.2 Classificazione dei vincoli
2
1.2 Gradi di libertà e coordinate lagrangiane
3
1.3 Principio di d’Alembert ed equazioni di Lagrange
3
1.3.1 Esempi nel caso statico
7
1.3.2 Esempio nel caso dinamico
8
1.4 Potenziali generalizzati e funzioni di dissipazione
9
1.4.1 Potenziali generalizzati
9
1.4.2 Equazioni di Lagrange in presenza di forze non derivabili
da un potenziale
10
1.4.3 Trasformazioni di gauge e lagrangiana di una particella immersa in un campo elettromagnetico
12
2 principio variazionale di hamilton ed equazioni di lagrange
15
2.1 Principio di Hamilton
15
2.2 Applicazioni del calcolo delle variazioni
19
2.2.1 Cammino più breve fra due punti in un piano
19
2.2.2 Il problema della brachistocrona
21
2.3 Leggi di conservazione
24
2.3.1 Coordinate cicliche
24
2.3.2 Funzione energia
26
3 applicazioni delle equazioni di lagrange
28
3.1 Problema dei due corpi
28
3.1.1 Movimento in un campo centrale
29
3.1.2 Il problema di Keplero
33
3.2 Piccole oscillazioni
37
3.2.1 Impostazione del problema
37
3.2.2 Riepilogo
41
3.2.3 Osservazioni
41
3.2.4 Un particolare problema
42
4 formalismo hamiltoniano
47
4.1 Equazioni di Hamilton
47
4.1.1 Un esempio
52
ii
indice
Notazione simplettica
53
Coordinate cicliche e metodo di Routh
54
Principio variazionale di Hamilton modificato
57
Parentesi di Poisson
58
Trasformazioni canoniche
60
Equazioni di Hamilton-Jacobi
70
Variabili angolo-azione nel caso unidimensionale
72
4.8.1 Esempio: l’oscillatore armonico unidimensionale
Riferimenti bibliografici della parte i
75
4.2
4.3
4.4
4.5
4.6
4.7
4.8
ii
73
relatività ristretta e introduzione alla meccanica quantistica
76
5 relatività speciale
77
5.1 Trasformazioni di Lorentz
77
5.1.1 Premessa
77
5.1.2 Concetto di evento
77
5.1.3 Principio di inerzia
78
5.1.4 Postulati della Relatività Ristretta e trasformazioni di Lorentz
78
5.2 Alcune conseguenze delle trasformazioni di Lorentz
84
5.2.1 Legge di trasformazione delle velocità
84
5.2.2 Contrazione delle lunghezze
86
5.2.3 Dilatazione dei tempi
86
5.3 Lo spazio di Minkowski
88
5.4 Quadrivelocità e quadriaccelerazione
92
5.5 Dinamica relativistica
93
5.6 Energia cinetica e momenti
95
5.7 Quadrimomento, tensore momento angolare
96
5.8 Equazioni del moto
97
5.9 Meccanica analitica relativistica (cenni)
98
5.9.1 Carica in moto in un campo elettromagnetico 101
5.10 *L’interferometro di Michelson e Morley 104
6 introduzione alla meccanica quantistica
107
6.1 *Il corpo nero 107
6.2 L’effetto fotoelettrico
110
6.3 Effetto Compton 112
6.4 Onde di materia di de Broglie
113
Riferimenti bibliografici della parte ii
116
iii appendici
117
a la trasformata di legendre
a.1 Definizione 118
b la successione di fibonacci
c note sulle unità di misura
118
122
123
iii
indice
d costanti fisiche fondamentali
Indice analitico
125
iv
124
NOZIONI ELEMENTARI. RICHIAMI
0.1
punto materiale
L’idea di punto materiale è uno dei concetti di base della meccanica analitica. Il
punto materiale è caratterizzato dalla sua massa. La posizione di un punto materiale in un sistema di riferimento Oxyz, supposto inerziale salvo avviso contrario,
è determinata dal raggio vettore r = x x̂ + yŷ + zẑ. Definiamo velocità
v=
dr
= ẋ x̂ + ẏŷ + żẑ,
dt
quantità di moto
p = mv,
e accelerazione
a=
dv
d2 r
= 2.
dt
dt
Sappiamo che, in un sistema di riferimento inerziale, valgono i principi della
dinamica. Se F è la forza risultante agente sulla particella di massa m si ha che,
per il secondo principio della dinamica,
F=
dp
dv
=m
= ma,
dt
dt
(0.1)
con m supposta costante rispetto al tempo.
Supponiamo che la particella sia libera. Allora x (t), y(t), z(t) sono tra loro
indipendenti. Se F = F (r, v, t) = F ( x, y, z; ẋ, ẏ, ż; t) dalle (0.1) otteniamo:
m ẍ (t) = Fx ( x, y, z; ẋ, ẏ, ż; t) ,
mÿ(t) = Fy ( x, y, z; ẋ, ẏ, ż; t) ,
(0.2)
mz̈(t) = Fz ( x, y, z; ẋ, ẏ, ż; t) .
Assegnate le condizioni iniziali r (0) = r0 e v(0) = v0 , se in un intorno di (r0 , v0 , 0)
le funzioni Fx , Fy e Fz sono “buone” (per esempio sono lisce, cioè sono di classe
C ∞ ), allora il sistema di equazioni (0.2) per t > 0 ammette, almeno in un intorno
di (r0 , v0 , 0), un’unica soluzione. Viene così soddisfatto, almeno localmente, il
principio deterministico newtoniano. Le equazioni (0.2) sono dette equazioni del
moto.
Osservazione. la quantità di moto si conserva, cioè p è costante, se F = 0 identicamente.
v
0.1 punto materiale
Definiamo momento angolare della particella rispetto a O
LO = r × p = mr × v.
(0.3)
Definiamo momento della forza F (o momento torcente) rispetto al punto O
dLO
dp
=r×
= r × F ≡ NO .
dt
dt
(0.4)
Dalla (0.4) si vede che il momento angolare si conserva, cioè LO è costante,
se NO = 0 identicamente. Per esempio se consideriamo F forza centrale tale
che il centro della forza è O, allora NO = 0 e quindi LO è costante. Il momento
angolare della particella rispetto a un punto O0 individuato rispetto a O dal vettore
posizione rO0 è dato da
LO0 = (r − rO0 ) × p.
Si vede facilmente che
dLO0
dr 0
dr 0
= (r − rO0 ) × F − O × p = NO0 − O × p ,
dt
dt
dt
dove NO0 è il momento delle forze rispetto a O0 .
Se F è una forza conservativa allora F = −∇U (r ), dove U (r ) è l’energia
potenziale.
Indichiamo con T = mv2 /2 l’energia cinetica della particella. Sappiamo che se F è
una forza conservativa vale il principio di conservazione dell’energia meccanica:
T + U = costante.
Ricordiamo che vale, anche se la forza non è conservativa, il teorema dell’energia
cinetica:
L=
Z B
A
F · dr =
1 2 1 2
mv − mv = TB − TA .
2 B 2 A
0.1.1 Esempio: pendolo semplice
Studiamo il moto del pendolo in Figura 0.1. Le forze agenti su m sono
T + P = ma.
La componente radiale della risultante è uguale a
T − mg cos θ = m
v2
,
l
mentre la componente trasversa è
−mg sin θ = maT
vi
0.1 punto materiale
y
θ
l
T
U=0
m
P
x
Figura 0.1: Il pendolo semplice.
dove aT è la componente trasversa dell’accelerazione. In generale, per un moto
nel piano abbiamo, in coordinate polari:
r = rr̂,
d r̂
dr
= ṙr̂ + r
= ṙr̂ + r θ̇ n̂,
v=
dt
dt
dv
d
a=
= (ṙr̂ + r θ̇ n̂) = r̈r̂ + ṙ θ̇ n̂ + ṙ θ̇ n̂ + r θ̈ n̂ − r θ̇ 2 r̂ =
dt
dt
= (r̈ − r θ̇ 2 )r̂ + (r θ̈ + 2ṙ θ̇ 2 )n̂.
Nel caso particolare del pendolo semplice r = l = costante, quindi l’accelerazione
trasversa è data da:
aT = l θ̈ n̂ = − g sin θ n̂,
da cui ricaviamo
g
θ̈ + sin θ = 0.
l
(0.5)
Questa è una equazione differenziale non lineare e la soluzione è una funzione ellittica. L’equazione diventa lineare se supponiamo che le oscillazioni siano piccole
in modo da poter porre sin θ ≈ θ. In questo caso risulta:
g
θ̈ + θ = 0.
l
La soluzione di questa equazione è
θ = θ0 cos(ωt − ϕ0 )
dove θ0 e ϕ0 sono determinati dalle condizioni iniziali, mentre ω =
pendolo oscilla con periodo
s
l
2π
= 2π
.
T=
ω
g
vii
p
g/l. Il
0.1 punto materiale
Nel caso in cui le oscillazioni non siano piccole, si dimostra che il periodo del
pendolo è dato da
s 1
32
l
2 θm
4 θm
1 + 2 sin
+ 2 2 sin
+··· ,
T = 2π
g
2
2
2 4
2
dove θm è l’ampiezza angolare delle oscillazioni.
L’equazione del moto del pendolo può essere ricavata anche nel modo seguente:
x = l cos θ
=⇒
y = l sin θ
ẋ (t) = −l θ̇ sin θ
.
ẏ(t) = l θ̇ cos θ
(0.6)
Allora v2 (t) = ẋ2 (t) + ẏ2 (t) = l 2 θ̇ 2 . Applicando il principio di conservazione
dell’energia abbiamo:
1 2
1
mv (t) + mgl (1 − cos θ (t)) = ml 2 θ̇ 2 + mgl (1 − cos θ (t)) =
2
2
= costante.
E=
Poiché E = costante deve risultare
g
dE
= ml 2 θ̇ θ̈ + mgl θ̇ sin θ = ml 2 θ̇ θ̈ + sin θ = 0
dt
l
da cui
θ̈ +
g
sin θ = 0,
l
cioè la (0.5). In generale θ̈ 6= 0.
Il moto del pendolo può ancora essere dedotto in questo modo. Abbiamo
L0 = r × mv = m(l cos θ x̂ + l sin θ ŷ) × (−l θ̇ sin θ x̂ + l θ̇ cos θ ŷ) =
= ml 2 θ̇ ẑ.
L’unico contributo al momento torcente è quello della forza peso, quindi
N0 = r × P = (l cos θ x̂ + l sin θ ŷ) × (mg x̂) = −lmg sin θ ẑ.
Dunque, ricordando la (0.4), abbiamo:
dL0
dL0
dml 2 θ̇
=
ẑ =
ẑ = ml 2 θ̈ ẑ = −lmg sin θ ẑ
dt
dt
dt
da cui
θ̈ +
g
sin θ = 0,
l
cioè di nuovo la (0.5).
viii
0.2 sistemi di particelle
Esercizi
1. Studiare il moto di una particella di massa m soggetta alla forza
F = −kr − αv
(k, α > 0)
dove r vettore posizione della particella e v velocità, con le condizioni iniziali
r (0) = r0 6= 0 e v(0) = v0 k r0 .
2. Studiare il moto di una particella di massa m e carica q in un campo magnetico B uniforme e costante. Siano r (0) = r0 e v(0) = v0 6= 0.
3. Studiare il moto di una particella di massa m e carica q in un campo elettrico
E e in un campo magnetico B, uniformi e costanti e tra loro ortogonali.
0.2
sistemi di particelle
Supponiamo di avere un sistema di N particelle puntiformi. Sia Oxyz il sistema di
riferimento (inerziale). Siano mi e ri rispettivamente la massa e il vettore posizione
dell’i-esima particella. Definiamo centro di massa
rCM =
∑iN=1 mi ri
,
M
con M = ∑iN=1 mi . Detta inoltre vi = dri /dt la velocità dell’i-esima particella, la
velocità del centro di massa sarà:
vCM =
∑iN=1 mi vi
.
M
Definiamo infine la quantità di moto
pCM =
N
∑ mi vi = MvCM .
i =1
Osserviamo che la quantità di moto è una grandezza additiva. Ogni particella del
sistema interagisce con le altre particelle e con il mondo esterno. Sia Fij la forza
che la j-esima particella ( j 6= i ) esercita sulla i-esima. Se vale la forma debole del
principio di azione e reazione allora
Fij + Fji = 0.
Per la seconda legge della dinamica
N
d pi
(e)
= Fi = Fi + ∑ Fji ,
dt
j =1
j 6 =i
ix
0.2 sistemi di particelle
(e)
dove Fi è la forza totale agente sulla i-esima particella, Fi è la forza totale esterna
agente sulla i-esima particella e ∑ N
j=1,j6=i Fji è la forza totale interna agente sulla
N
N
i-esima particella. Poiché ∑i=1 ∑ j=1,j6=i Fji = 0 allora
N
d pCM
(e)
= ∑ Fi = F (e) ,
dt
i =1
dove F (e) è la risultante delle forze esterne. Se F (e) = 0 allora pCM è costante e
quindi il centro di massa si muove di moto rettilineo uniforme, assumendo che la
massa M sia costante. Definiamo momento angolare del sistema di N particelle
puntiformi rispetto a O
LO =
N
∑ ri × pi .
i =1
Si ricava banalmente che
N
dLO
= ∑ ri × Fi = NO .
dt
i =1
Osserviamo
che se vale la forma forte del principio di azione e reazione, cioè se
ri − r j × Fji = 0 ∀i, j 6= i, allora
NO =
N
(e)
∑ ri × Fi
i =1
(e)
= NO .
(e)
Se NO = 0 allora LO è costante.
Sia ri0 il vettore posizione dell’i-esima particella rispetto al centro di massa, cioè
si ha ri0 = ri − rCM . Allora
LO =
N
∑ (rCM + ri − rCM ) × pi = rCM × pCM + LCM .
i =1
Definiamo energia cinetica del sistema di N particelle
T=
N
1
∑ 2 mv2i .
i =1
Vale ancora il teorema dell’energia cinetica:
L=
N
∑
Z 2
i =1 1
Fi · dri = T2 − T1 ,
dove 1 e 2 sono rispettivamente le configurazioni iniziale e finale del sistema.
Osserviamo che
N
∑
Z 2
i =1 1
Fi · dri =
N
∑
Z 2
(e)
i =1 1
Fi
N
N
· dri + ∑ ∑
Z 2
i =1 j =1 1
j 6 =i
x
Fji · dri
0.2 sistemi di particelle
e inoltre
Fji · dri + Fij · dr j = Fji · dri − dr j = Fji · dr ji
con Fji · dr ji 6= 0 in generale.
Se tutte le forze sono conservative allora
L=
N
∑
i =1
(e)
Ui
(e)
(1) − Ui
(2)
+
1 N Uij (1) − Uij (2) .
∑
2 i,j=1
j 6 =i
Vale il principio di conservazione dell’energia meccanica:
N
(e)
T + U = T + ∑ Ui
i =1
+
1 N
Uji = costante.
2 i,j∑
=1
i6= j
Esercizi
1. Dimostrare che
dLCM
= NCM .
dt
2. Dimostrare che
LCM =
N
∑ (ri − rCM ) × pi0 ,
i =1
con pi0 = mi (vi − vCM ).
xi
Parte I
MECCANICA ANALITICA
PRINCIPIO DI D’ALEMBERT ED EQUAZIONI DI LAGRANGE
1.1
vincoli
1.1.1 Definizioni
Fissato un sistema di riferimento inerziale, la posizione di una particella puntiforme è, a ogni istante, individuata dal vettore r (t). La particella è libera se non
è soggetta ad alcuna condizione che ne limiti la traiettoria; in caso contrario si
dice che essa è vincolata. Allo stesso modo per un sistema di N particelle, se
tutte le particelle che costituiscono il sistema sono libere, il sistema è detto libero;
altrimenti si dice che è vincolato.
La presenza di vincoli comporta l’introduzione di forze che agiscono sulle particelle limitandone la mobilità. Queste forze sono dette forze vincolari o reazioni
vincolari. Chiameremo attive le forze che non sono dovute a vincoli.
1.1.2 Classificazione dei vincoli
Classifichiamo i vincoli:
• In base alla forma delle relazioni che legano le coordinate delle particelle:
– vincoli olònomi: possono essere espressi da relazioni del tipo
f (r1 , r2 , . . . , r N , t) = 0.
(1.1)
Il sistema si dirà, in tal caso, olonomo. Per esempio:
* una particella che si muove nel piano xy lungo la retta y = mx + q;
2
2
* il corpo rigido: le reazioni vincolari sono del tipo kri − r j k − cij = 0
(la distanza tra due punti generici del corpo rigido è costante);
– vincoli anolònomi: non possono essere espressi da relazioni del tipo
(1.1). Tali vincoli possono essere espressi da vincoli di diseguaglianza
o equivalentemente da vincoli di uguaglianza in cui compaiono anche
le velocità. Esempi:
* particella vincolata a stare all’interno di una sfera di centro O e
raggio a. In tal caso il vincolo si esprime con kr k2 − a2 < 0.
• In base alla dipendenza dal tempo:
– vincoli scleronomi: non dipendono dal tempo;
– vincoli reonomi: dipendono dal tempo. Per esempio, se una particella
si muove su una retta che ruota con velocità angolare ω, questa avrà
un’equazione del tipo y = tan(ωt) x + q.
2
1
1.2 gradi di libertà e coordinate lagrangiane
• In base al tipo di reazione vincolare
– vincoli lisci: la reazione vincolare è sempre normale al vincolo. Per
esempio, se il vincolo olonomo è una superficie di equazione f (r, t), la
reazione vincolare ϕ sarà parallela al gradiente di f : ϕ = µ(t)∇ f ;
– vincoli scabri: la reazione vincolare ha una componente tangenziale al
vincolo (sono presenti forze di attrito).
1.2
gradi di libertà e coordinate lagrangiane
La configurazione di un sistema libero formato da N particelle è definita dagli N
vettori posizione ri (t), con i = 1, . . . , N, ed è quindi individuata, in uno spazio
tridimensionale, da 3N quantità scalari o coordinate indipendenti.
Definiamo numero di gradi di libertà del sistema il minimo numero di coordinate indipendenti in grado di individuare la configurazione. Secondo questa
definizione un sistema libero di N particelle in uno spazio tridimensionale ha 3N
gradi di libertà. In un sistema vincolato le coordinate non sono tra loro indipendenti. Se i vincoli sono olonomi e sono espressi mediante k equazioni del tipo (1.1),
allora il numero di coordinate indipendenti sarà n = 3N − k e quindi si avranno
n gradi di libertà. Possiamo pertanto introdurre n coordinate indipendenti che
tengano conto dei vincoli. Siano q1 , q2 , . . . , qn tali coordinate. Esse non hanno in
generale le dimensioni di una lunghezza e non possono essere raggruppate per
formare le tre componenti di un vettore.
Per esempio, si consideri un pendolo nel piano. Il sistema avrebbe due gradi
di libertà se non fosse vincolato; dato che la distanza tra la particella e l’origine è
fissata uguale a l si ha invece un solo grado di libertà. Si può allora individuare
lo stato del sistema in ogni istante utilizzando una sola coordinata quale, per
esempio, l’angolo θ.
È possibile esprimere i vettori posizione mediante le nuove coordinate tramite
le trasformazioni
r i = r i ( q1 , q2 , . . . , q n , t )
(i = 1, . . . , N ).
Le coordinate qi , con i = 1, . . . , n, sono dette coordinate lagrangiane o generalizzate
del sistema. Esse, ovviamente, non sono uniche.
1.3
principio di d’alembert ed equazioni di lagrange
Definiamo spostamento virtuale infinitesimo di un sistema un cambiamento di configurazione relativo a una variazione δri delle coordinate, compatibile con le forze
e i vincoli a cui il sistema è sottoposto a un dato istante t. Chiamiamo tale spostamento virtuale per distinguerlo da uno spostamento reale dri in cui si considera
un intervallo dt nel quale variano forze e vincoli.
3
1.3 principio di d’alembert ed equazioni di lagrange
Consideriamo un sistema di N particelle. Supponiamo che il sistema sia in
equilibrio, cioè che ogni particella del sistema è in equilibrio. Allora
Fi = 0 =⇒ Fi · δri = 0 =⇒
δL =
N
∑ Fi · δri = 0,
(1.2)
i =1
con i = 1, . . . , N, dove δL è il lavoro virtuale infinitesimo. Le Fi sono le risultanti
di tutte le forze agenti sull’i-esima particella (interazione con l’Universo, con le
(a)
(a)
altre particelle, forza vincolare). Se poniamo Fi = Fi + Φi , dove Fi e Φi sono rispettivamente la forza attiva totale e la forza vincolare agenti sulla i-esima
particella, la (1.2) diventa:
δL =
N
(a)
∑ Fi
i =1
N
· δri + ∑ Φi · δri = 0.
(1.3)
i =1
Assumeremo d’ora in avanti che il lavoro virtuale delle forze vincolari sia nullo, cioè ∑iN=1 Φi · δri = 0, e che i vincoli siano olonomi bilaterali e lisci. Allora
possiamo scrivere la (1.3) come
N
(a)
∑ Fi
i =1
· δri = 0,
(1.4)
che è il principio dei lavori virtuali. Osserviamo che i δri , con i = 1, . . . , N, non sono
(a)
in generale linearmente indipendenti e quindi i Fi non sono automaticamente
nulli.
Siano q1 , q2 , . . . , qn le coordinate lagrangiane del sistema scelte. Allora
r i = r i ( q1 , q2 , . . . , q n , t ) ,
δri =
n
(1.5a)
∂ri
∑ ∂qk δqk ,
(1.5b)
k =1
con i = 1, . . . , N. Supponendo che il lavoro virtuale delle forze vincolari sia nullo
si ha
!
N
N
n
n
N
∂r
∂r
(a)
(a)
(a)
i
i
δL = ∑ Fi · δri = ∑ Fi · ∑
δqk = ∑ ∑ Fi ·
δqk =
∂q
∂q
k
k
i =1
i =1
k =1
k =1 i =1
=
n
( a)
∑ Qk
k =1
δqk ,
dove
(a)
Qk =
N
(a)
∑ Fi
i =1
·
∂ri
∂qk
(k = 1, . . . , n)
sono dette forze generalizzate (attive). Poiché le δqk sono indipendenti si ha
(a)
δL = 0 =⇒ Qk = 0
(k = 1, . . . , n).
4
(1.6)
1.3 principio di d’alembert ed equazioni di lagrange
(a)
Si può dimostrare che Qk = 0 con k = 1, . . . , n è condizione necessaria e
sufficiente per l’equilibrio, in presenza di vincoli olonomi bilaterali lisci.
La relazione (1.4) è applicabile solo al caso statico. Se si vuole applicare il
principio dei lavori virtuali anche al caso di moto del sistema, bisogna partire
dalle N equazioni del moto d pi /dt = Fi ⇐⇒ Fi − d pi /dt = 0 per i = 1, . . . , N.
Se continuiamo ad assumere che le forze vincolari non compiono lavoro virtuale,
la (1.4) diventa:
N d pi
(a)
(Principio di d’Alembert) (1.7)
∑ Fi − dt · δri = 0.
i =1
Osserviamo che le forze vincolari non compaiono esplicitamente.
Indichiamo d’ora in poi con Fi la forza attiva totale agente sull’i-esima particella,
togliendo l’apice (a). Come nel caso statico occorre ottenere un’espressione che
contenga solo gli spostamenti virtuali delle coordinate generalizzate (che sono
indipendenti). Partiamo, come nel caso statico, dalle trasformazioni
r i = r i ( q1 , . . . , q n , t )
δri =
n
(i = 1, . . . , N )
∂ri
∑ ∂qk δqk
k =1
n
dri
∂r
∂r
vi =
= ∑ i q˙k + i .
dt
∂qk
∂t
k =1
(1.8)
Come prima abbiamo
N
n
i =1
k =1
∑ Fi · δri = ∑ Qk δqk ,
dove Qk = ∑iN=1 Fi · ∂ri /∂qk . Osserviamo che le qk non hanno necessariamente le dimensioni di una lunghezza, così come le Qk non hanno in generale le
dimensioni di una forza. Consideriamo ora
!
N
n
N
d pi
dvi ∂ri
∑ dt · δri = ∑ ∑ mi dt · ∂qk δqk =
i =1
k =1 i =1
( (1.9)
)
n
N
∂ri
d ∂ri
d
mi vi ·
− mi vi ·
δqk .
=∑ ∑
dt
∂qk
dt ∂qk
k =1 i =1
Osserviamo che dalla (1.8) si ricava
∂vi
∂ dri
∂r
=
= i.
∂q̇k
∂q̇k dt
∂qk
(1.10)
Inoltre, in analogia con la (1.8) si ha
n
∂2 r i
∂2 r i
∑ ∂qk ∂q j q̇ j + ∂qk ∂t =
j =1
d ∂ri
=
.
dt ∂qk
∂vi
=
∂qk
n
∂
∑ ∂q j
j =1
5
∂ri
∂qk
∂
q̇ j +
∂t
∂ri
∂qk
=
(1.11)
1.3 principio di d’alembert ed equazioni di lagrange
In base a queste osservazioni possiamo scrivere:
( )
N
n
N
∂vi
d pi
d
∂vi
∑ dt · δri = ∑ ∑ dt mi vi · ∂q̇k − mi vi · ∂qk δqk =
i =1
k =1 i =1
( "
#
)
n
d
∂ N 1
∂ N 1
2
2
=∑
mi vi
−
mi vi
δqk =
dt ∂q̇k i∑
2
∂qk i∑
2
=1
=1
k =1
n d ∂T
∂T
−
δqk ,
=∑
dt ∂q̇k
∂qk
k =1
dove T = ∑iN=1 mi v2i /2. Allora il principio di d’Alembert è nel nostro caso equivalente alla relazione
n d ∂T
∂T
∑ dt ∂q̇k − ∂qk − Qk δqk = 0.
k =1
Dato che gli spostamenti virtuali infinitesimi δqk , con k = 1, . . . , n, sono indipendenti, possiamo scrivere n equazioni del moto
d ∂T
∂T
−
= Qk .
(1.12)
dt ∂q̇k
∂qk
Se supponiamo che le forze attive siano tutte conservative e derivino da un unico
potenziale U, si ha Fi = −∇i U (con ∇i = (∂/∂xi , ∂/∂yi , ∂/∂zi )) e quindi
Qk =
N
∑ Fi ·
i =1
N
∂U
∂ri
∂r
= − ∑ ∇i U · i = −
.
∂qk
∂qk
∂qk
i =1
Tenendo presente che U dipende solo da q e non da q̇ (cioè ∂U/∂q̇k = 0; k =
1, . . . , n), le n equazioni del moto (1.12) possono essere scritte nel modo seguente:
d
∂
∂
(T − U ) −
( T − U ) = 0.
dt ∂q̇k
∂qk
Definendo
L = T−U
(1.13)
lagrangiana del sistema, possiamo scrivere le equazioni di Lagrange:
d
∂
∂L
L −
= 0.
dt ∂q̇k
∂qk
(1.14)
Osservazione. Se consideriamo F = F (q, t) funzione di classe opportuna, si può
dimostrare che L0 (q, q̇, t) = L(q, q̇, t) + dF/dt è un’altra funzione lagrangiana che
porta alle stesse equazioni del moto.1
1 Si è qui utilizzata la notazione, che ricorrerà per brevità in seguito, q = (q1 , q2 , . . . , qn ) per indicare
l’ennupla delle coordinate generalizzate; tuttavia bisogna tenere sempre presente che tale ennupla
non è, in generale, un vettore (basti pensare che, come già osservato, le qi possono avere anche
dimensioni diverse).
6
1.3 principio di d’alembert ed equazioni di lagrange
Osservazione. Le equazioni di Lagrange possono essere ancora scritte nella forma
usuale se U = U (q, q̇, t) e
∂U
d ∂U
Qk = −
+
.
(1.15)
∂qk
dt ∂q̇k
La funzione U è detta potenziale generalizzato, o potenziale dipendente anche
dalle velocità e dal tempo. La funzione lagrangiana può ancora essere definita
come L = T − U.
1.3.1 Esempi nel caso statico
Determiniamo le condizioni di equilibrio del pendolo semplice (si veda Figura 0.1
a pagina vii). Il sistema ha un solo grado di libertà e l’unica forza attiva è la forza
peso P, quindi
r = l cos θ x̂ + l sin θ x̂,
∂
∂
δL = P · δr = P ·
(l cos θ ) x̂ + (l sin θ )ŷ δθ =
∂θ
∂θ
= mg x̂ · (−l sin θ x̂ + l cos θ ŷ) = −mgl sin θ
Q = −mgl sin θ = 0 =⇒ sin θ = 0 =⇒ θ = 0
oppure
θ = π.
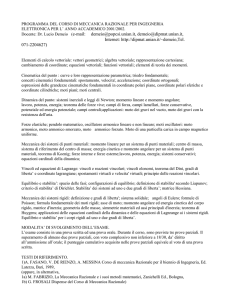
Consideriamo ora il punto materiale P di massa m in Figura 1.1 vincolato senza
attrito su una circonferenza di raggio R e centro O, posto in un piano verticale.
La particella è connessa al punto più alto mediante una molla di costante elastica
k e lunghezza a riposo nulla. Anche questo sistema ha un solo grado di libertà.
Abbiamo
x P = R sin θ
,
y P = R cos θ
∂x p
∂y p
δr P =
x̂ +
ŷ δθ = R(cos θ x̂ − sin θ ŷ).
∂θ
∂θ
La forza peso è data da P = mgŷ. Inoltre r A = − Rŷ, quindi r P − r A = R sin θ x̂ +
R(1 + cos θ )ŷ. Pertanto la forza elastica agente sulla particella è Fel = −k (r P −
r A ) = −kR[sin θ x̂ + (1 + cos θ )ŷ]. Dunque:
P · δr P = −mgR sin θδθ,
Fel · δr P = −kR2 [sin θ cos θ − sin θ (1 + cos θ )]δθ = kR2 sin θδθ.
La forza generalizzata attiva è:
Q = −mgR sin θ + kR2 sin θ = R sin θ (kR − mg).
La condizione di equilibrio si ha per Q = 0 cioè:
1. sin θ = 0, vale a dire θ = 0 oppure θ = π;
2. ∀θ ∈ [0, 2π ] se mg = kR.
7
1.3 principio di d’alembert ed equazioni di lagrange
A
k
x
O
θ
R
P
y
Figura 1.1: Pendolo collegato a una molla.
Esercizi
1. Si consideri il sistema in figura formato da due aste di lunghezza l e massa
m, incernierate in A e O, in un piano verticale. L’asta AB reca al suo estremo
un carrello connesso in O da una molla di costante elastica k e lunghezza a
riposo nulla. Si determinino le eventuali condizioni di equilibrio.
2. Il sistema in figura è formato da una lamina quadrata di lato l e massa m,
poggiata su un piano orizzontale senza attrito, e da un’asta incernierata in
O di lunghezza l e massa m. L’asta è appoggiata in un punto nel lato AB
della lamina (senza attrito) e nel punto B è applicata una molla di costante
elastica k e lunghezza a riposo nulla. Si determini il valore di k per cui l’asta
in posizione di equilibrio formi un angolo di π/6 con l’orizzontale.
1.3.2 Esempio nel caso dinamico
Riprendiamo in considerazione il pendolo semplice (vedi Figura 0.1 a pagina vii).
Il sistema ha un grado di libertà, quindi sarà sufficiente scrivere una sola equazione di Lagrange. Valgono sempre le (0.6), dunque l’energia cinetica è data
da
T=
1 2
1
1
mv = m( ẋ2 + ẏ2 ) = ml 2 θ̇ 2 ,
2
2
2
mentre l’energia potenziale è (fissando come punto a potenziale gravitazionale
nullo il punto più basso del pendolo, come mostrato in figura)
U = mgl (1 − cos θ ).
Pertanto la lagrangiana del sistema è
L = T−U =
1 2 2
ml θ̇ − mgl (1 − cos θ )
2
8
1.4 potenziali generalizzati e funzioni di dissipazione
e l’equazione di Lagrange
ml 2 θ̈ + mgl sin θ = 0
che è equivalente alla (0.5).
1.4
potenziali generalizzati e funzioni di dissipazione
1.4.1 Potenziali generalizzati
Consideriamo una particella puntiforme di massa m e carica q in un campo
elettromagnetico E, B. Su di essa agisce la forza di Lorentz:
v
F = q E+ ×B .
(1.16)
c
Le equazioni del moto sono perciò
m
dv
d2 r
v
= m 2 = q E+ ×B .
dt
dt
c
Siano ora ϕ = ϕ( x, y, z, t) e A = A( x, y, z, t) i potenziali scalare e vettoriale
rispettivamente in modo che
E = −∇ ϕ −
B = ∇ × A.
1 ∂A
,
c ∂t
(1.17)
(1.18)
Riscriviamo la forza di Lorentz mediante le precedenti:
1 ∂A v
F = q −∇ ϕ −
+ × (∇ × A) =
c ∂t
c
1
1 ∂A 1
= q −∇ ϕ −
+ ∇( A · v) − (v · ∇) A
c ∂t
c
c
(1.19)
dove si è tenuto conto del fatto che ∇ · v = 0 e quindi v × (∇ × A) = ∇( A ·
v) − (v · ∇) A. Osserviamo ora che d A/dt = ∂ A/∂t + (v · ∇) A; inoltre dad ∇v ( A·v)
= d A/dt; infine ∇v ϕ = 0 (dove ∇v =
to che A non dipende da v,
dt
(∂/∂ ẋi , ∂/∂ẏi , ∂/∂żi )). Allora
1
1 dA
F = q −∇ ϕ − A · v −
=
c
c dt
1
d
1
(1.20)
∇v ϕ − A · v
=
= q −∇ ϕ − A · v +
c
dt
c
d ∇v U
= −∇U +
,
dt
dove U = qϕ − qA · v/c è un esempio di potenziale generalizzato, ovvero potenziale
dipendente dalle derivate rispetto al tempo delle coordinate generalizzate (che
9
1.4 potenziali generalizzati e funzioni di dissipazione
qui corrispondono con le solite coordinate cartesiane). La funzione lagrangiana è,
allora, la seguente:
L = T−U =
1 2
q
mv − qϕ + A · v =
2
c
1
= m( ẋ2 + ẏ2 + ż2 ) − qϕ( x, y, z, t)+
2
q
+ ( ẋA x ( x, y, z, t) + ẏAy ( x, y, z, t) + żAz ( x, y, z, t)).
c
Esercizi
1. Scrivere le equazioni di Lagrange di una carica puntiforme in un campo
elettromagnetico. Dimostrare che esse coincidono con le equazioni del moto
di partenza.
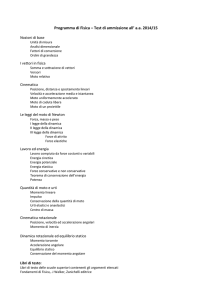
2. Scrivere la lagrangiana e le equazioni di Lagrange per i seguenti sistemi:
a) pendolo piano semplice;
b) pendolo piano doppio;
c) pendolo piano il cui punto di sospensione è libero di muoversi orizzontalmente su una retta liscia .
3. Due punti materiali, uno di massa m1 e l’altro di massa m2 , sono collegati
da una fune (inestensibile e di massa trascurabile) che passa attraverso un
foro in un tavolo perfettamente liscio, in modo che m1 , per t = 0, abbia un
moto circolare uniforme sulla superficie del tavolo ed m2 rimanga sospesa.
Nell’ipotesi che m2 possa muoversi solo in direzione verticale, si scriva la
lagrangiana e si ricavino le equazioni di Lagrange. Discutere la presenza di
integrali primi del moto .
Figura 1.2: Da sinistra: problema 2b, problema 2c, problema 3.
1.4.2 Equazioni di Lagrange in presenza di forze non derivabili da un potenziale
Supponiamo che su una particella puntiforme agisca anche la seguente forza
viscosa:
Fa = −(α x v x ı̂ + αy vy ̂ + αz vz k̂)
10
1.4 potenziali generalizzati e funzioni di dissipazione
dove i coefficienti α x , αy , αz sono caratteristici del mezzo2 e ı̂, ̂, k̂ sono i versori
degli assi coordinati. Osserviamo che, se introduciamo la cosiddetta funzione di
dissipazione di Rayleigh
F=
1
(α x v2x + αy v2y + αz v2z ),
2
abbiamo che Fa = −∇v F. Più in generale se il sistema è formato da N particelle,
la forza viscosa totale è data da:
Fa = −
N
∑ (αx vkx ı̂ + αy vky ̂ + αz vkz k̂),
k =1
dove si intende vk = (vkx , vky , vkz ) è la velocità della k-esima particella.
funzione di dissipazione in questo caso è data da:
F=
La
1 N
(α x v2kx + αy v2ky + αz v2kz ).
2 k∑
=1
La forza viscosa agente sulla k-esima particella può ovviamente essere scritta
come Fa,k = −∇vk F. Se il sistema ha n gradi di libertà e q j con j = 1, . . . , n sono le
coordinate generalizzate, le equazioni di Lagrange sono le seguenti:
d
∂L
∂L
−
= Qj
(1.21)
dt ∂q˙j
∂q j
dove le Q j sono le forze generalizzate associate alle forze viscose e non derivabili
da un potenziale, e L è la lagrangiana, scritta tenendo conto di tutte le forze
conservative. Sappiamo che:
Qj =
N
∑
k =1
Fa,k ·
N
N
∂rk
∂r
= − ∑ ∇vk F · k =
∂q j
∂q j
k =1
= − ∑ ∇vk F ·
k =1
∂F
∂vk
=− .
∂q˙j
∂q˙j
Allora in conclusione possiamo scrivere le equazioni di Lagrange (1.21) nel modo
seguente:
d
∂L
∂L
∂F
−
+
= 0.
dt ∂q˙j
∂q j
∂q˙j
Evidentemente siamo in grado di scrivere esplicitamente le equazioni del moto
conoscendo le due funzioni scalari L e F.
2 In realtà questi coefficienti dipendono oltre che dal mezzo anche dalla forma e dalle dimensioni del
corpo immerso nel fluido.
11
1.4 potenziali generalizzati e funzioni di dissipazione
1.4.3 Trasformazioni di gauge e lagrangiana di una particella immersa in un campo
elettromagnetico
Siano ϕ e A i potenziali scalare e vettoriale nel campo elettromagnetico. Sappiamo
che la lagrangiana assume la forma: L = mv2 /2 − qϕ + qA · v/c. Il sistema ha tre
gradi di libertà. Operiamo le seguenti trasformazioni di gauge:
1 ∂χ(r, t)
;
c ∂t
A → A0 = A + ∇χ(r, t).
ϕ → ϕ0 = ϕ −
Il campo elettromagnetico è invariante per trasformazioni di gauge. Sia ora L0 =
mv2 /2 − qϕ0 + qA0 · v/c la nuova lagrangiana. Allora:
mv2
q ∂χ q
q
− qϕ +
+ A · v + ∇χ · v =
2
c ∂t
c
c
q ∂χ q
= L+
+ ∇χ · v =
c ∂t
c
q dχ
= L+
.
c dt
L0 =
Concludendo, L0 ed L differiscono per la derivata totale rispetto al tempo di una
funzione scalare di r e di t. Le equazioni di Lagrange sono, di conseguenza,
invarianti per trasformazioni di gauge.
Problemi
1. Se L = L(q, q̇, t) è una lagrangiana per un sistema a n gradi di libertà che
verifica le equazioni di Lagrange, dimostrare che L0 = L + dF (q, t)/dt, con
F funzione arbitraria di classe opportuna, verifica anch’essa le equazioni di
Lagrange.
Dimostrazione. Osserviamo che
n
dF (q, t)
∂F (q, t)
∂F (q, t)
=∑
q̇k +
.
dt
∂qk
∂t
k =1
Allora per j = 1, . . . , n
∂L0 (q, q̇, t)
∂L(q, q̇, t) ∂F (q, t)
=
+
∂q˙j
∂q̇ j
∂q j
∂L0 (q, q̇, t)
∂L(q, q̇, t)
∂ dF (q, t)
=
+
.
∂q j
∂q j
∂q j
dt
Supponendo che
∂ dF (q, t)
d ∂F (q, t)
=
∂q j
dt
dt ∂q j
12
1.4 potenziali generalizzati e funzioni di dissipazione
abbiamo dunque, sempre per j = 1, . . . , n, che
d
∂L
∂L
−
= 0 ⇐⇒
dt ∂q̇ j
∂q j
∂ ∂F (q, t)
d ∂F (q, t) ∂L0
d ∂L0
−
+
= 0 ⇐⇒
−
dt ∂q̇ j
dt ∂q j
∂q j
∂q j
∂t
d ∂L0
∂L0
−
= 0.
dt ∂q̇ j
∂q j
2. Siano q1 , . . . , qn un insieme di coordinate generalizzate indipendenti di un
sistema a n gradi di libertà con lagrangiana L(q, q̇, t), dove q = (q1 , . . . , qn )
e q̇ = (q̇1 , . . . , q̇n ). Si supponga di passare a un altro sistema di coordinate
generalizzate indipendenti s1 , . . . , sn per mezzo di una trasformazione puntuale qk = qk (s, t) con k = 1, . . . , n ed s = (s1 , . . . , sn ). Dimostrare che la
forma delle equazioni di Lagrange è invariante rispetto alle trasformazioni
puntuali.
Dimostrazione. Per j, k = 1, . . . , n abbiamo
q̇ j =
n
∂q j
∑ ∂si ṡi +
i =1
∂q j
∂q̇ j
∂q j
=⇒
=
∂t
∂ṡi
∂si
Ora, L = L(q(s, t), q̇(s, ṡ, t), t), dunque
∂L
=
∂sk
n
∂L ∂q j
n
∂L ∂q̇ j
∑ ∂q j ∂sk + ∑ ∂q̇ j ∂sk
j =1
j =1
n
∂L ∂q̇ j
∂L ∂q j
=
∑ ∂q̇ j ∂ṡk ∑ ∂q̇ j ∂sk
j =1
j =1
n n
d ∂L ∂q j
∂L d ∂q j
∑ dt ∂q̇ j ∂sk + ∑ ∂q̇ j dt ∂sk =
j =1
j =1
n n
d ∂L ∂q j
∂L ∂q̇ j
=∑
+∑
.
dt ∂q̇ j ∂sk j=1 ∂q̇ j ∂sk
j =1
∂L
=
∂ṡk
∂L
d
=
dt ∂ṡk
n
In conclusione, per k = 1, . . . , n, ricordando che
d
∂L
∂L
−
=0
dt ∂q̇ j
∂q j
per j = 1, . . . , n,
d
∂L
∂L
−
=
dt ∂ṡk
∂sk
n n
n
d ∂L ∂q j
∂L ∂q̇ j
∂L ∂q j
=∑
+∑
−∑
+
dt ∂q̇ j ∂sk j=1 ∂q̇ j ∂sk j=1 ∂q j ∂sk
j =1
n
n ∂L ∂q̇ j
d ∂L
∂L ∂q j
=∑
−
= 0.
−∑
∂q̇ j ∂sk
dt ∂q̇ j
∂q j ∂sk
j =1
j =1
13
1.4 potenziali generalizzati e funzioni di dissipazione
3. Dimostrare che vale la seguente forma di Nielsen delle equazioni di Lagrange:
∂ Ṫ
∂T
−2
= Qj
∂q̇ j
∂q j
( j = 1, . . . , n)
dove T = T (q, q̇, t) è l’energia cinetica, Ṫ ≡ dT/dt e Q j è la j-esima forza
generalizzata.
Dimostrazione. Partiamo dalle equazioni di Lagrange (1.12), valide anche in
presenza di forze attive generalizzate non conservative. Osserviamo che:
dT (q, q̇, t)
=
dt
n
∑
∂T
∂T
∂T
q̇ j +
q̈ j +
∂q j
∂q̇ j
∂t
n
∂ ∂T
+∑
q̇ j +
∂q̇k ∂q j
j =1
n ∂ ∂T
+∑
q̇ j +
∂q j ∂q̇k
j =1
d ∂T
+
.
dt ∂q̇k
j =1
∂ Ṫ
∂T
=
∂q̇k
∂qk
=
∂T
∂qk
=
∂T
∂qk
Allora
∂ Ṫ
∂T
−2
= Qk ⇐⇒
∂q̇k
∂qk
d ∂T
∂T
∂T
+
−2
= Qk ⇐⇒
∂qk
dt ∂q̇k
∂qk
d ∂T
∂T
−
= Qk .
dt ∂q̇k
∂qk
14
=⇒
∂2 T
∂ ∂T
=
q̈ j +
∂q̇k ∂q̇ j
∂t ∂q̇ j
∂
∂T
∂ ∂T
q̈ j +
=
∂q̇ j ∂q̇k
∂t ∂q̇ j
PRINCIPIO VARIAZIONALE DI HAMILTON ED EQUAZIONI
DI LAGRANGE
2.1
principio di hamilton
Prenderemo ora in considerazione solo quei sistemi di N particelle puntiformi,
con vincoli olonomi lisci, per i quali tutte le forze attive sono derivabili da un
solo potenziale scalare generalizzato (questa richiesta è fatta solo per semplicità e
senza perdere in generalità), funzione cioè delle coordinate e delle velocità delle
particelle e del tempo. Questi sistemi sono detti monogenici. In particolare, se il
potenziale è funzione esplicita solo delle coordinate di posizione delle particelle
il sistema è detto conservativo. Vedremo fra poco, come sia possibile ottenere le
equazioni di Lagrange relative a un sistema monogenico a partire da un principio
integrale (il principio variazionale di Hamilton), il quale prende in considerazione
l’intero moto del sistema tra due istanti t0 e t1 e le “piccole” variazioni di questo
moto rispetto a quello reale. Per fare questo avremo bisogno di elementi di calcolo
delle variazioni, che cercheremo di esporre nel modo più elementare possibile,
utilizzando soltanto le tecniche familiari del calcolo differenziale.
La configurazione del sistema (olonomo e monogenico), oggetto di studio, è
supposta descritta dai valori di n coordinate generalizzate q1 , q2 , . . . , qn e corrisponde alla posizione di un punto q = (q1 , . . . , qn ) in uno spazio n-dimensionale
che, come sappiamo, è detto spazio delle configurazioni. Al variare del tempo il
punto q(t), che rappresenta il sistema, si muove nello spazio delle configurazioni
descrivendo una curva che è, ovviamente, la traiettoria del moto del sistema. Come abbiamo già accennato, il principio variazionale prende in considerazione solo
quelle traiettorie che costituiscono un insieme di traiettorie variate sincrone. In altre parole, si considerano tutti quei movimenti q = q(t) del sistema con t ∈ [t0 , t1 ],
intervallo base, tali che q(t0 ) = q(0) e q(t1 ) = q(1) . Chiameremo ammissibile un
movimento q(t) che gode di questa proprietà. Noi supporremo sempre, salvo
avviso contrario, che le funzioni siano di classe C ∞ .
In Figura 2.1 sono riportate, in uno spazio delle configurazioni bidimensionale,
alcune traiettorie ammissibili, che partono dalla configurazione iniziale q(0) al
tempo t0 e arrivano alla configurazione finale q(1) al tempo t1 . Sappiamo che è
possibile introdurre per il nostro sistema (olonomo e monogenico) la funzione
lagrangiana
L = T − V,
(2.1)
dove T è l’energia cinetica del sistema e V è il potenziale generalizzato. Naturalmente si avrà
L = L (q, q̇, t) .
(2.2)
15
2
2.1 principio di hamilton
q2
(1)
q2
(0)
q2
(0)
(0)
q1
q1
q1
Figura 2.1: Alcune traiettorie ammissibili in uno spazio delle configurazioni bidimensionale
Consideriamo il funzionale azione
S [q(t)] =
Z t1
t0
L (q(t), q̇(t), t) dt,
(2.3)
dove q(t) è un moto ammissibile (cioè q(t0 ) = q(0) e q(t1 ) = q(1) ). Osserviamo
che S [q(t)] ha valori in R e non è una funzione di funzione (non è una funzione
del tempo), ma un integrale di linea che dipende dal moto q(t). Il valore che
S [q(t)] assume dipende ovviamente dal moto ammissibile q(t) scelto.
Introduciamo il
Principio (variazionale di Hamilton) - Tra i moti ammissibili del sistema compresi
tra gli istanti t0 e t1 , il moto reale è quello che rende stazionaria l’azione.
Ricordiamo cosa si intende per punto stazionario di una funzione f : R → R di
classe opportuna. Si dice che x0 ∈ R è un punto stazionario di f se f 0 ( x0 ) = 0.
Un punto stazionario (o critico) di una funzione può allora essere un estremante
relativo (di massimo o di minimo) o di flesso orizzontale oppure né estremante
relativo né flesso orizzontale. Inoltre se x0 è un punto stazionario si ha
f ( x0 + e) − f ( x0 ) = f 0 ( x0 )e + O(e2 ) = O(e2 ).
In modo analogo diremo che l’azione è stazionaria lungo una certa traiettoria
se su di essa assume, a meno di infinitesimi di ordine superiore al primo, lo
stesso valore corrispondente a traiettorie che differiscono da quella considerata
per uno spostamento infinitesimo. Più precisamente se indichiamo con q(t) un
moto ammissibile che rende stazionaria l’azione e con q(t, e) = q(t) + eh(t) una
traiettoria diversa, dipendente dal parametro e ∈ R (assumiamo |e| 1) e dalla
funzione vettoriale h(t) = (h1 (t), . . . , hn (t)) soggetta alla condizione
h ( t0 ) = h ( t1 ) = 0
(2.4)
16
2.1 principio di hamilton
(infatti q(t, e) deve essere un moto ammissibile e pertanto q(t0 , e) = q(0) e q(t1 , e) =
q(1) ), abbiamo che
S [q(t, e)] − S [q(t)] = O(e2 ).
(2.5)
Vogliamo ora provare che una traiettoria ammissibile q(t) che rende stazionaria
l’azione soddisfa le equazioni di Lagrange
d ∂L(q, q̇, t)
∂L(q, q̇, t)
=0
(k = 1, . . . , n).
(2.6)
−
dt
∂q̇k
∂qk
Abbiamo infatti:
S [q(t, e)] − S [q(t)] =
Z t1 h i
=
L q(t) + eh(t), q̇(t) + e ḣ(t), t − L (q(t), q̇, t) dt =
(2.7)
t0
Z t1 n ∂L (q(t), q̇(t), t)
∂L (q(t), q̇(t), t)
=
hi ( t ) +
ḣi (t) e dt + O(e2 ).
∑
∂qi
∂q̇i
t0 i =1
Osserviamo che
d ∂L
∂L
d ∂L
h i ( t );
hi ( t ) −
ḣi (t) =
∂q̇i
dt ∂q̇i
dt ∂q̇i
t1
Z t1
d ∂L
∂L
hi (t) dt =
hi ( t ) = 0
∂q̇i
∂q̇i
t0 dt
t0
perché valgono le (2.4). Allora la (2.7) può essere riscritta come
S [q(t, e)] − S [q(t)] =
n Z t1 d ∂L (q(t), q̇(t), t)
∂L (q(t), q̇(t), t)
−
hi (t)e dt + O(e2 ).
=∑
∂q
dt
∂
q̇
t
i
i
i =1 0
(2.8)
Se imponiamo la condizione che l’azione sia stazionaria lungo q(t), valga cioè la
(2.5), e teniamo presente che hi (t), con i = 1, . . . , n, sono funzioni di classe C ∞
arbitrarie, soggette soltanto alla condizione hi (t0 ) = hi (t1 ) = 0, abbiamo
Z t1 ∂L (q(t), q̇(t), t)
d ∂L (q(t), q̇(t), t)
−
hi (t) dt = 0
(i = 1, . . . , n). (2.9)
∂qi
dt
∂q̇i
t0
Vogliamo ora provare che queste equazioni implicano che
d ∂L (q(t), q̇(t), t)
∂L (q(t), q̇(t), t)
−
=0
(i = 1, . . . , n),
∂qi
dt
∂q̇i
cioè sono soddisfatte le equazioni di Lagrange. Vale il seguente
Lemma (fondamentale del calcolo variazionale) - Se una funzione liscia f : [t0 , t1 ] →
R verifica la proprietà
Z t1
t0
f (t) g(t) dt = 0
(2.10)
per ogni funzione liscia g : [t0 , t1 ] → R, soggetta alla condizione g(t0 ) = g(t1 ) = 0,
allora f (t) = 0 ∀t ∈ [t0 , t1 ].
17
2.1 principio di hamilton
Dimostrazione. Ragioniamo per assurdo e supponiamo che ∃t∗ ∈ (t0 , t1 ) in cui
f non si annulli. Senza perdere in generalità possiamo supporre f (t∗ ) > 0.
Per continuità ∃ I (t∗ ) ⊂ (t0 , t1 ), intorno di t∗ , in cui f è sempre positiva, avendo indicato con I (t∗ ) un intorno aperto di t∗ . Possiamo sempre prendere una
funzione liscia g, stante la sua arbitrarietà,
che sia positiva in I1 (t∗ ) ⊂ I (t∗ ) e
R
t
nulla altrove.1 Ne consegue che t01 f (t) g(t) dt > 0. Questo è assurdo. Allora
f (t) = 0 ∀t ∈ (t0 , t1 ) =⇒ f (t) = 0 ∀t ∈ [t0 , t1 ].
Se chiamiamo δqi (t) = ehi (t) la variazione dell’i-esima componente di q(t)
e con δS la corrispondente variazione dell’azione, relativa all’infinitesimo δq, la
relazione (2.8) può essere scritta nella forma:
n Z t1 ∂L
d ∂L
δS = ∑
−
δqi (t) dt.
∂qi
dt ∂q̇i
i =1 t0
Questo risultato ci dice, anche per il lemma precedente, che se l’azione è stazionaria lungo q(t), cioè se δS = 0, allora valgono le equazioni di Lagrange. In modo
sintetico possiamo scrivere:
∂L(q, q̇, t)
d ∂L(q, q̇, t)
δS = 0 ⇐⇒
−
=0
(i = 1, . . . , n)
∂qi
dt
∂q̇i
e vale il viceversa.
Osservazione. Abbiamo visto che le equazioni di Lagrange (o di Eulero-Lagrange)
nelle ipotesi fatte (sistemi, cioè, olonomi e monogenici) discendono da una legge
generale, il principio variazionale di Hamilton. Non possiamo stabilire, a priori,
se il moto reale q(t), che soddisfa le equazioni di Lagrange, ha la proprietà di
minimizzare l’azione, anche se il principio di Hamilton è spesso detto principio
della minima azione.
Osservazione. Nel Capitolo 1 abbiamo visto che le equazioni di Lagrange sono
invarianti per la trasformazione
L0 = L +
dF
.
dt
Anche il principio variazionale di Hamilton è ancora valido se alla lagrangiana
aggiungiamo la derivata totale rispetto al tempo di un’arbitraria funzione scalare
F (q(t), t) di classe opportuna, infatti:
Z t1 dF (q(t), t)
0
S [q(t)] =
dt =
L(q(t), q̇(t), t) +
dt
t0
t
= S + F ( q ( t ), t ) 1 = S + F ( q ( t1 ), t1 ) − F ( q ( t0 ), t0 ),
t0
cioè S ed S0 differiscono per un termine supplementare che si annulla quando
varia l’azione. Dunque la condizione δS0 = 0 coincide con la condizione δS = 0 e
la forma delle equazioni del moto resta immutata.
1 Osserviamo che la funzione g scelta si annulla, ovviamente, in t0 e t1 .
18
2.2 applicazioni del calcolo delle variazioni
2.2
applicazioni del calcolo delle variazioni
Possiamo utilizzare il principio variazionale per studiare le proprietà di stazionarietà o estremali di funzionali diversi dall’azione.
Supponiamo in particolare di avere una famiglia di curve in uno spazio ndimensionale, ognuna descritta da una funzione vettoriale liscia y( x ) con x ∈
[ x0 , x1 ], tutte soggette alle condizioni y( x0 ) = y(0) e y( x1 ) = y(1) , e una funzione scalare liscia U = U (y( x ), ẏ( x ), x ). Vogliamo determinare y( x ) che rende
stazionario il funzionale
J [y( x )] =
Z x1
x0
u (y( x ), ẏ( x ), x ) dx.
Notiamo che possono esserci casi più complessi, in cui per esempio U è funzione anche di derivate di ordine superiore al primo di y( x ), oppure x ∈ Rm con
m ≥ 2. La trattazione del problema può anche essere portata avanti esattamente
come nel caso dell’azione: si ricerca y( x ) che rende stazionario il funzionale J.
Non sempre è semplice stabilire poi se la funzione trovata abbia la proprietà di
minimizzare o di massimizzare J. Ricordiamo che condizione necessaria perché
y( x ) sia un minimo o un massimo locale per J è che esso sia un punto stazionario. Si arriverà ovviamente a n equazioni scalari che continueremo a chiamare di
Lagrange o di Eulero-Lagrange:
d
∂u
∂u
−
=0
(k = 1, . . . , n).
dx ∂ẏk
∂yk
2.2.1 Cammino più breve fra due punti in un piano
Siano dati A( x0 , y0 ) e B( x1 , y1 ) in un piano (vedi Figura 2.2). Supponiamo che
x0 < x1 . Se indichiamo2 una generica curva regolare3 con y = y( x ) di estremi A
e B e con s l’ascissa curvilinea, abbiamo che:
q
q
2
2
ds = (dx ) + (dy) = 1 + ẏ2 ( x ) dx.
In questo caso allora
Z x1 q
J [y( x )] =
1 + ẏ2 ( x ) dx.
x0
p
Ovviamente u = u(ẏ) = 1 + ẏ2 ( x ) e y( x ) è nel nostro caso una funzione scalare.
Adoperando le equazioni di Eulero-Lagrange:
∂u
d ∂u
−
= 0.
dx ∂ẏ
∂y
2 Se x0 = x1 possiamo considerare funzioni del tipo x = x (y).
3 In realtà possiamo sempre supporre che y sia liscia.
19
2.2 applicazioni del calcolo delle variazioni
y
B
y1
y0
A
x0
x1
x
Figura 2.2: Cammini ammessi tra due punti nel piano.
Essendo ∂u/∂y = 0 risulta
∂u
ẏ
= c,
=p
∂ẏ
1 + ẏ2
dove c è una costante
√ rispetto a x. Di conseguenza ẏ( x ) = a, con a costante
legata a c da a = c/ 1 − c2 . Quindi y( x ) = ax + b, cioè la curva che minimizza
il funzionale J è il segmento di estremi A e B. Imponendo in particolare che
y( x0 ) = y0 e y( x1 ) = y1 otteniamo le costanti di integrazione
y1 − y0
x1 − x0
x1 y0 − x0 y1
b=
.
x1 − x0
a=
Si prova facilmente, in questo caso, che y( x ), che rende stazionario J, minimizza il
funzionale. In altre parole possiamo dire che la curva che nel piano xy congiunge
A e B e ha lunghezza minima è il segmento di estremi A e B.
e 2 x1
uẏẏ (ẏ( x ))ḣ2 ( x ) dx + O(e3 ).
2 x0
p
Nel nostro caso uẏẏ (ẏ( x )) = 1/ (1 + ẏ2 ( x ))3 > 0. Perciò, per |e| 1, J [y( x ) +
eh( x )] ≥ J [y( x )], cioè la funzione trovata minimizza il funzionale (se ḣ( x ) non è
identicamente nulla).
J [y( x ) + eh( x )] − J [y( x )] =
Z
Esercizi
1. Verificare che il moto reale di una particella libera e isolata rende minima
l’azione.
2. Una particella è soggetta al potenziale U ( x ) = Fx, con F costante. La particella si muove dal punto x = 0 al punto x = a nell’intervallo di tempo
t0 . Si assuma che il moto della particella si possa esprimere nella forma
x (t) = A + Bt + Ct2 . Trovare i valori di A, B, C che rendono minima l’azione.
20
2.2 applicazioni del calcolo delle variazioni
x1
A
y1
x
U=0
B
y
Figura 2.3: Schema del problema della brachistocrona.
2.2.2 Il problema della brachistocrona
Il problema della brachistocrona può essere espresso nel modo seguente:
Problema (della brachistocrona) - Dati due punti A e B in un piano verticale, con
A ad altezza maggiore di B, trovare tra tutti gli archi di curva che li congiungono, la
traiettoria che una particella puntiforme di massa m, con velocità iniziale nulla, deve
percorrere per andare da A a B in modo che il tempo di percorrenza sia il minimo possibile.
Per risolvere il problema poniamo l’origine degli assi in A ≡ (0, 0) e orientiamo
l’asse delle ordinate verso il basso (vedi Figura 2.3). Supponiamo B ≡ ( x1 , y1 )
con x1 > 0 e y1 > 0 (se x1 = 0, cioè se B appartiene all’asse delle y il problema
è banale: la soluzione è data dal segmento AB). Le equazioni della traiettoria
(passante per i punti assegnati):
y = y( x )
y (0) = 0
( x ∈ [0, x1 ])
y ( x1 ) = y1
Consideriamo la solita ascissa curvilinea s a partire da A:
q
q
ds = (dx )2 + (dy)2 = 1 + ẏ2 ( x ) dx.
Supponiamo i vincolo olonomi e lisci. Fissiamo in y = 0 il livello 0 dell’energia
potenziale (relativa alla forza peso). Allora:
p
1 2
mv − mgy = 0 =⇒ v = 2gy,
2
dove g è l’accelerazione di gravità e v la velocità in y (notare che y > 0, v > 0 se
x ∈ (0, x1 ]).
s
ds
1 + ẏ2 ( x )
dt =
=
dx
( x ∈ (0, x1 ]).
v
2gy( x )
21
2.2 applicazioni del calcolo delle variazioni
Poniamo
s
u(y( x ), ẏ( x )) =
1 + ẏ2 ( x )
y( x )
quindi
p
2g
Z T
0
dT ≡ J [y( x )] =
Z x1
0
u(y( x ), ẏ( x )) dx.
Fra tutte le traiettorie, passanti per A e B, quella che rende stazionario il funzionale J (condizione necessaria per il minimo) soddisfa le equazioni di Lagrange con
x ∈ (0, x1 ]:
d ∂u(y, ẏ)
∂u(y, ẏ)
−
= 0.
(2.11)
dx
∂ẏ
∂y
Ora,
∂u
ẏ
=√ p
∂ẏ
y 1 + ẏ2
e dunque
ÿ
∂u(y, ẏ)
ẏ2
+√ p
=− √ p
2
∂ẏ
2y y 1 + ẏ
y (1 + ẏ2 )3
p
1 + ẏ2
∂u
=−
√ .
∂y
2y y
d
dx
(2.12)
(2.13)
L’equazione (2.11), per le relazioni (2.12) e (2.13), diventa, ∀ x ∈ (0, x1 ]:
p
1 + ẏ2
ẏ2
ÿ
− √ p
+√ p
+
√ = 0 ⇐⇒
2y y
2y y 1 + ẏ2
y (1 + ẏ2 )3
ÿ( x )
1
+
=0
2
1 + ẏ ( x ) 2y( x )
Moltiplicando ambo i membri per ẏ( x ) abbiamo
ẏ( x )
ẏ( x )ÿ( x )
1 d
1 d
+
= 0 ⇐⇒
ln (1 + ẏ( x )) +
ln y( x ) = 0 ⇐⇒
1 + ẏ2 ( x ) 2y( x )
2 dx
2 dx
1 d
(ln(1 + ẏ( x )) + ln y( x )) = 0 ⇐⇒ (1 + ẏ2 ( x ))y( x ) = c ⇐⇒
2
dx
s
s
y( x )
ẏ( x ) = 1 =⇒
c − y( x )
Z
y( x )
dy =
c − y( x )
Posto
y=
c
c
(1 − cos τ ) =⇒ dy = sin τ dτ
2
2
22
Z
dx.
(2.14)
2.2 applicazioni del calcolo delle variazioni
dove τ è un parametro (con y(τ = 0) = 0), dalla (2.14) abbiamo
s
s
0
Z τ
Z τ
c
0) c
c sin2 τ2
(
1
−
cos
τ
c
0
0
2
x=
sin
τ
dτ
=
sin τ 0 dτ 0 =
c
c
0) 2
0) 2
c
−
(
1
−
cos
τ
(
1
+
cos
τ
0
0
2
2
v
u
0
0
Z τu
Z τ
c sin2 τ2 c
sin τ2 c
0
0
t
=
sin τ dτ =
sin τ 0 dτ 0 =
τ0 2
τ0 2
2
0
0 cos
c cos 2
2
=
Z τ
0
τ0
c sin
dτ 0 =
2
2
Z τ
c
c
= (τ − sin τ ).
2
2
0
(1 − cos τ 0 ) dτ 0 =
Nota che x (0) = 0. Concludendo, le equazioni parametriche della traiettoria sono
date da:
c
x (τ ) = (τ − sin τ )
2
c
y(τ ) = (1 − cos τ )
2
con τ ∈ [0, τ1 ]. Le equazioni trovate sono quelle di una cicloide. Sostituendo i
valori delle coordinate di B si trovano dalle precedenti c e τ1 . Il sistema siffatto
ammette sempre soluzione. Rimane da provare (cosa non banale) che la soluzione
trovata minimizza il funzionale.
Possiamo tentare una soluzione del problema cambiando semplicemente punto
di vista e cercando un’espressione del tipo x = x (y). In tal caso
s
ds
1 + ẋ2
dt =
=
dy.
v
2gy
Posto
s
ϕ=
1 + ẋ2
y
risulta
p
2g
Z T
0
dt = F [ x (y)] =
Z y1
0
ϕ( x (y), ẋ (y), y) dy.
Le equazioni di Lagrange sono
d ∂ϕ
∂ϕ
−
= 0.
dy ∂ ẋ
∂x
Poiché ∂ ϕ/∂x = 0, ∂ ϕ/∂ ẋ = costante, abbiamo
ẋ
1
= √ ⇐⇒
√ √
a
y 1 + ẋ2
2
ẋ2
y
dx
a−y
=
=⇒
=1
2
1 + ẋ
a
dy
y
23
2.3 leggi di conservazione
da cui si prosegue come in
p precedenza. Osserviamo però che in questo caso ϕ xx =
ϕ x ẋ = 0 e che ϕ ẋ ẋ = 1/ y(1 + ẋ2 (y))3 > 0. Allora, se x (y) rende stazionario il
funzionale, abbiamo che
F [ x (y) + eh(y)] − F [ x (y)] =
e2
2
Z y1
0
ϕ ẋ ẋ ḣ2 (y) dy + O(e3 ) ≥ 0
ovvero F [ x (y) + eh(y)] ≥ F [ x (y)], se ḣ(y) non identicamente nulla, cioè x (y) è un
minimo.
2.3
2.3.1
leggi di conservazione
Coordinate cicliche
Abbiamo visto che il moto di un sistema di particelle olonomo e monogenico con
n gradi di libertà è governato dalle equazioni di Lagrange
d ∂L (q, q̇, t) ∂L (q, q̇, t)
−
=0
dt
∂q̇
∂qk
(k = 1, . . . , n)
dove L = T − U e qk sono le coordinate generalizzate. Apriamo una piccola
parentesi. Introdotto un sistema di assi cartesiani solidale con un sistema di riferimento inerziale, nel caso di un punto materiale soggetto a una forza conservativa
abbiamo:
L=
1
m ẋ2 + ẏ2 + ż2 − U ( x, y, z).
2
Si vede che
∂L
= m ẋ ≡ p x ,
∂ ẋ
∂L
= mẏ ≡ py ,
∂ẏ
∂L
= mż ≡ pz ,
∂ż
dove p x , py e pz sono le componenti rispettivamente lungo x, y e z della quantità
di moto. In analogia nel caso più generale possiamo chiamare
pk =
∂L (q, q̇, t)
∂q̇k
il momento canonico o momento coniugato alla coordinata generalizzata qk . Osserviamo che se ∂L/∂qk = 0, cioè se la lagrangiana non dipende esplicitamente da qk , si
ha
d ∂L
d pk
=
= 0.
dt ∂q̇k
dt
Allora pk è costante rispetto al tempo. Diamo allora la seguente
24
2.3 leggi di conservazione
Definizione - Una coordinata generalizzata si dice ciclica o ignorabile se la lagrangiana L, pur essendo funzione esplicita di q̇k , non dipende esplicitamente da
qk .
Possiamo pertanto enunciare la seguente proprietà: il momento coniugato a una
coordinata generalizzata ciclica si conserva. In modo equivalente possiamo dire che
il momento coniugato a una coordinata ciclica è un integrale primo del moto, in
quanto si traduce in una relazione del tipo f (q1 , . . . , qn , q̇1 , . . . , q̇n , t) = costante.
Se qk è una coordinata ciclica, allora L è invariante rispetto a una trasformazione
qk → qk + α, con α costante. Ora, se qk , coordinata ciclica, è uno spostamento, si
ha che una traslazione rigida lungo tale direzione non ha effetto alcuno sul moto
del sistema e il corrispondente momento coniugato, che è una quantità di moto,
si conserva. Se invece la coordinata ciclica qk è un angolo il sistema è invariante
per rotazioni intorno all’asse corrispondente e il relativo momento coniugato, che
è un momento angolare, si conserva.
Troviamo per esempio i momenti generalizzati nel caso di una particella in
moto in un campo elettromagnetico. Abbiamo visto che la lagrangiana di una
particella di massa m e carica4 q in un campo elettromagnetico è data da:
L=
1
q
m( ẋ2 + ẏ2 + ż2 ) − qϕ + A · v
2
c
dove v = ẋ x̂ + ẏŷ + żẑ è la velocità della particella, c è la velocità della luce nel
vuoto, ϕ, A sono il potenziale scalare e vettoriale rispettivamente. Il momento
coniugato a x è dato da
q
q
Px = m ẋ + A x = p x + A x
c
c
dove p x = m ẋ è la componente lungo x dell’usuale quantità di moto della particella. In maniera analoga i momenti coniugati a y e z sono rispettivamente:
q
Py = py + Ay ,
c
q
Pz = pz + Az .
c
Possiamo scrivere allora in forma vettoriale il momento generalizzato come
q
P = p + A.
c
Ora, se per ipotesi ϕ, A non dipendono esplicitamente da x, cioè x è una variabile
ciclica, allora il momento coniugato rispetto a x, cioè Px , è una costante del moto.
Esercizi
• Verificare l’esistenza di una coordinata ciclica nell’esercizio 2c di pagina 10.
Dare un’interpretazione fisica del corrispondente momento coniugato.
4 Qui con il simbolo q non indichiamo una coordinata generalizzata!
25
2.3 leggi di conservazione
• Verificare l’esistenza di una coordinata ciclica nell’esercizio 3 di pagina 10.
Dare un’interpretazione fisica del corrispondente momento coniugato.
• Si scriva in coordinate cilindriche la lagrangiana di una particella di massa
m e carica q in un campo magnetico (costante) generato da un filo rettilineo
percorso da corrente stazionaria I. Esistono coordinate cicliche? (Piccolo
suggerimento: scrivere il potenziale vettore A imponendo che valga la gauge di
Coulomb, div A = 0.)
2.3.2 Funzione energia
Sia L = L (q, q̇, t) la lagrangiana di un sistema con n gradi di libertà, dove q =
(q1 , . . . , qn ). Si ha che
n dL
∂L
∂L
∂L
q̇k +
q̈k + .
=∑
dt
∂q
∂
q̇
∂t
k
k
k =1
Poiché per k = 1, . . . , n si ha, dalle equazioni di Lagrange,
d ∂L
∂L
=
∂qk
dt ∂q̇k
allora:
n
dL
=∑
dt
k =1
d
⇐⇒
dt
"
d ∂L
dt ∂q̇k
q̇k +
n
∂L
d
∂L
∂L
∂L
=∑
⇐⇒
q̈k +
q̇k +
∂q̇k
∂t
dt
∂
q̇
∂t
k
k =1
n
#
∂L
∂L
∑ ∂q̇k q̇k − L + ∂t = 0.
k =1
(2.15)
Chiamiamo funzione energia la quantità
h (q, q̇, t) =
n
∂L
∑ ∂q̇k q̇k − L.
k =1
Allora la relazione (2.15) si scrive anche:
dh
∂L
=− .
dt
∂t
Se L = L(q, q̇), cioè se ∂L/∂t = 0, h è una costante del moto. Sotto opportune
ipotesi h è proprio l’energia totale del sistema. Se l’energia cinetica è una funzione
omogenea di secondo grado delle q̇k , cioè
T=
n
∑
k,j=1
A jk (q, t)q̇k q̇ j
con Akj = A jk , e se il potenziale V non dipende da q̇, allora
n
∂L
= 2 ∑ Aik q̇k
∂q̇i
k =1
26
2.3 leggi di conservazione
e quindi
n
∂L
∑ ∂q̇i q̇i = 2T.
i =1
Allora
h=
n
∂L
∑ ∂q̇i q̇i − L = 2T − T + V = T + V
i =1
che è l’energia totale del sistema. Se la lagrangiana non dipende esplicitamente
dal tempo abbiamo allora che l’energia del sistema è una costante del moto.
27
3
APPLICAZIONI DELLE EQUAZIONI DI LAGRANGE
3.1
problema dei due corpi
Supponiamo di avere un sistema isolato di due particelle di massa m1 ed m2 ,
soggette alla mutua interazione di natura conservativa. Rispetto a un osservatore
O inerziale indichiamo con r1 ed r2 i vettori posizione delle due particelle. Il
vettore posizione del centro di massa è:
R=
m1 r1 + m2 r2
,
m1 + m2
(3.1)
mentre il vettore posizione relativa è dato da
r = r2 − r1 .
(3.2)
Possiamo esprimere r1 ed r2 mediante i vettori appena introdotti:
m2
r,
m1 + m2
m1
r2 = R +
r.
m1 + m2
r1 = R −
(3.3)
Assumiamo che l’energia potenziale (relativa alla mutua interazione) abbia la
seguente proprietà:
U = U (r ).
(3.4)
La forza agente sulla particella 2 è data da F2 = −∇r2 U (r ) = −∇r U (r ), mentre
la forza agente sulla particella 1 è F1 = −∇r1 U (r ) = ∇r U (r ). Abbiamo pertanto
F1 + F2 = 0 (forma debole del principio di azione e reazione). Notiamo che se
U = U (r ) allora F2 = −dU/dr r̂ = − F1 (forma forte del principio di azione e
reazione). La lagrangiana del sistema delle due particelle è
L=
1
1
m1 kṙ1 k2 + m2 kṙ2 k2 − U (r ).
2
2
(3.5)
Sulla base delle relazioni (3.3), la (3.5) si può scrivere come
L=
m1 + m2
1 m1 m2
k Ṙk2 +
kṙ k2 − U (r )
2
2 m1 + m2
(3.6)
La quantità µ = m1 m2 /(m1 + m2 ) è detta massa ridotta (si noti che 1/µ = 1/m1 +
1/m2 e che se m2 m1 , allora r1 ≈ R e µ ≈ m2 ).
Dall’espressione (3.6) si deduce che Ṙ = V è costante, essendo R ciclica. Il centro di massa perciò è in quiete o si muove di moto rettilineo uniforme. Possiamo
28
3.1 problema dei due corpi
prendere in ogni caso come sistema di riferimento proprio quello del centro di
massa e avremo:
m1 r1 + m2 r2 = 0
m2
r1 = −
r
m1 + m2
m1
r2 =
r.
m1 + m2
Dunque la lagrangiana sarà nella forma:
L=
1
µkṙ k2 − U (r ).
2
È interessante notare come il problema dei due corpi si riconduca al problema di
una particella di massa pari alla massa ridotta immersa in un campo esterno.
3.1.1 Movimento in un campo centrale
Si abbia una particella P di massa m (che possiamo riguardare anche come la
massa ridotta di due particelle puntiformi) in un campo esterno. Assumiamo che
tale campo sia conservativo e che l’energia potenziale (o potenziale) dipenda solo
dalla distanza della particella P da un punto O, fisso rispetto a un sistema di
riferimento inerziale. Chiamiamo come al solito vettore posizione della particella
−→
r = OP e v = ṙ il vettore velocità. Abbiamo allora:
L=
1 2
mv − U (r ),
2
dove r = kr k, v2 = v · v e U (r ) è l’energia potenziale. La forza agente sulla
particella è
F = −∇U (r ) = −
dU
r̂.
dr
Essa è centrale e il centro della forza è il punto O.
Notiamo che l’energia potenziale ha simmetria sferica, dunque ogni soluzione
delle equazioni del moto deve essere invariante per rotazioni attorno a un asse
arbitrario passante per O. Il momento angolare della particella P rispetto a O,
cioè l = mr × v = r × p (con p quantità di moto della particella), si conserva. Si
dimostra facilmente che il moto si svolge in un piano (piano dell’orbita) ortogonale alla direzione (costante) di l, sempre che l 6= 0. Se l = 0, r è parallelo a p e il
moto è unidimensionale.
Supponiamo che l = l0 6= 0 (l0 costante). Il sistema ha due gradi di libertà,
considerato che il moto avviene in un piano. Possiamo, pertanto, esprimere la
lagrangiana in coordinate polari:
L=
1
m(ṙ2 + r2 θ̇ 2 ) − U (r ).
2
(3.7)
29
3.1 problema dei due corpi
Si vede subito che θ è ciclica e dunque il suo momento coniugato pθ = ∂L/∂θ̇ =
mr2 θ̇ è costante. Osserviamo che
pθ = mr2 θ̇ = l0
(3.8)
che è costante. Notiamo, per inciso, che
1 l0
1
= r2 θ̇
2m
2
è la cosiddetta velocità areolare ed è una costante del moto. Abbiamo così ottenuto,
in modo semplice, la
Legge (Seconda legge di Keplero) - Il vettore posizione della particella (o di un pianeta
considerato puntiforme) rispetto al centro dell’orbita (o centro della forza) spazza aree
uguali in intervalli di tempo uguali.
Osservazione. Questa legge è stata ottenuta semplicemente supponendo che la forza agente sulle particelle sia centrale (senza assegnare la dipendenza esplicita da
r di U).
Utilizzando le equazioni di Lagrange
d ∂L
∂L
−
= 0 ⇐⇒
dt ∂ṙ
∂r
∂U (r )
mr̈ − mr θ̇ 2 +
= 0.
∂r
(3.9)
Per la (3.8) abbiamo
mr θ̇ 2 =
l02
.
mr3
Allora la (3.9) può essere riscritta nel modo seguente:
mr̈ −
l02
∂U (r )
+
= 0.
3
mr
∂r
Osserviamo che nel nostro caso la lagrangiana non dipende esplicitamente dal
tempo e che l’energia cinetica è una funzione omogenea di secondo grado rispetto
a ṙ e θ̇. Ne consegue che la funzione energia h è una costante del moto ed è proprio
l’energia totale della particella E. Possiamo, allora, scrivere:
∂L
∂L
ṙ + θ̇ − L =
∂ṙ
∂θ̇
1
1
1 l02
= m(ṙ2 + r2 θ̇ 2 ) + U (r ) = mṙ2 +
+ U (r )
2
2
2 mr2
E=
dove abbiamo tenuto conto della (3.8).
30
(3.10)
3.1 problema dei due corpi
Osservazione. Grazie alla conservazione del momento angolare, il moto è come
unidimensionale con un potenziale efficace
Ueff (r ) =
1 l02
+ U (r ).
2 mr2
(3.11)
Se r (0) = r0 , supposto che nell’intervallo di tempo considerato r = r (t) è
crescente,
r
dr
2
=
( E − Ueff (r ))
dt
m
e, quindi,
t=
dr 0
Z r (t)
q
r0
2
m (E
− Ueff (r 0 ))
.
(3.12)
Si può ricavare anche l’anomalia θ in funzione di r. Infatti dalla (3.8) otteniamo:
dθ =
l0 1
l0 1
dr
q
dt =
2
2
mr
mr
2
m ( E − Ueff (r ))
(abbiamo qui considerato un intervallo di tempo in cui r = r (t) è crescente) e, di
conseguenza,
l0
θ (r ) − θ (r0 ) =
m
dr 0
Z r (t)
1
r
r0
q
02
2
m (E
− Ueff (r 0 ))
.
Se il dominio di variazione di r ha due limiti, rmin ed rmax , il movimento è limitato
e tutta l’orbita è contenuta nella corona circolare centrata in O, con raggio interno
rmin e raggio esterno rmax . Questo discorso non vuol dire affatto che l’orbita, nel
caso di moto limitato, è chiusa. Perché ciò accada, è necessario e sufficiente che
∆θ =
2l0
m
dr 0
Z rmax
1
rmin
r
q
02
2
m (E
− Ueff (r 0 ))
= 2π
j
n
(3.13)
con j, n ∈ N. Ricordiamo, per inciso, che l’anomalia θ è definita sempre a meno di
multipli di 2π. Ora, se indichiamo con
T0 = 2
dr 0
Z rmax
rmin
q
2
m (E
− Ueff
(3.14)
(r 0 ))
il periodo della funzione r = r (t) (stiamo supponendo che il moto sia limitato e
che r ∈ [rmin , rmax ]), dopo un tempo pari a nT0 , si avrà una variazione di θ pari
a 2πj (multiplo di 2π) e, pertanto, il vettore posizione ritornerà a essere quello
iniziale, cioè r (nT0 ) = r (0).
In generale, per un potenziale generico U (r ), supponendo l’esistenza di moti
limitati, la traiettoria non è un’orbita chiusa.
31
3.1 problema dei due corpi
Ueff
E2
O
rmin r0
rmax
r
E1
E0
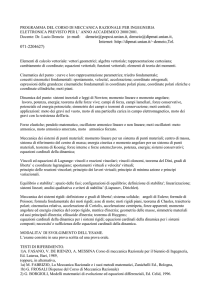
Figura 3.1: Andamento del potenziale efficace nel problema dei due corpi.
Teorema (di Bertrand) - Le uniche forze centrali che danno luogo a orbite chiuse per
ogni condizione iniziale corrispondente a moti limitati sono:
• quella proporzionale all’inverso del quadrato di r (come la forza gravitazionale);
• quella corrispondente alla legge di Hooke (dipendenza lineare da r).
Supponiamo ora che F = −k/r2 r̂ o, in modo equivalente, U (r ) = k/r, con
k > 0. Per il teorema di Bertrand, le orbite relative a moti limitati sono chiuse. Il
potenziale efficace, in questo caso, è:
Ueff =
1 l02
k
− .
2 mr2
r
Per r = r0 = l02 /(mk ), Ueff ha il valore minimo, esattamente pari a −mk2 / 2l02 .
Dal grafico di Ueff (si veda Figura 3.1) possiamo ricavare le seguenti informazioni:
• E = E0 = −mk2 / 2l02 , ṙ (t) = 0 =⇒ r (t) = r0 costante. In questo
caso l’orbita della particella è circolare. Il moto è circolare uniforme con
frequenza ω = l0 /(mr02 ) (questa espressione discende in modo immediato
dalla (3.8)).
• Se E = E1 ∈ −mk2 / 2l02 , 0 , il moto è limitato con r ∈ [rmin , rmax ]. Si può
dimostrare che la traiettoria è un’ellisse.
• Se E = E2 ≥ 0, r (t) è inferiormente limitato e superiormente non limitato.
Si può dimostrare che la traiettoria è per E2 = 0 una parabola e per E2 > 0
un’iperbole.
32
3.1 problema dei due corpi
y
b
Q( x, y)
θ
a
c
O
F2
a
a
F1
x
Figura 3.2: Ellisse in coordinate cartesiane.
Esercizio
1. Nell’ipotesi che la forza centrale sia F = −k/r2 r̂ dimostrare che il vettore
A = p × l − mkr̂
è una costante del moto. A è detto vettore di Laplace-Runge-Lenz. Calcolare
inoltre A · l.
3.1.2 Il problema di Keplero
Ricordiamo l’espressione dell’ellisse in coordinate polari e alcune sue proprietà.
Detti a il semiasse maggiore e b il semiasse minore, l’equazione dell’ellisse in
coordinate cartesiane è
x2
y2
+
= 1.
a2
b2
Siano F1 = (c, 0) e F2 = (−c, 0) (con c ≥ 0) i due fuochi e Q = ( x, y) un punto
generico dell’ellisse (vedi Figura 3.2). Allora, per definizione di ellisse abbiamo
che
QF1 + QF2 = 2a.
Inoltre vale la relazione
c2 = a2 − b2 .
Il quadrato della distanza del punto Q dal fuoco F1 è dato da:
2
2
2
2
2
2
2
2
2
QF1 = ( x − c) + y = x − 2xc + c + y = x − 2xc + a − b + b
b2 2
b2
2
2
= x − 2xc + a − 2 x = 1 − 2 x2 − 2xc + a2 .
a
a
33
2
x2
1− 2
a
=
3.1 problema dei due corpi
Q( x, y)
r
F2
O
θ
F1
Figura 3.3: Ellisse in coordinate polari.
Introduciamo l’eccentricità e = c/a. Notiamo che e ∈ (0, 1) e che per e = 0 l’ellisse
diventa una circonferenza. Inoltre c = ea. Abbiamo quindi
2
a2 − b2 2
c2 2
2
x
−
2xc
+
a
=
x − 2xc + a2 = e2 x2 − 2eax + a2 =
a2
a2
= ( a − ex )2
QF1 =
da cui
QF1 = a − ex.
Analogamente si trova che
2
QF2 = ( a + ex )2 =⇒ QF2 = a + ex
ed è quindi soddisfatta la condizione QF1 + QF2 = 2a. In coordinate polari fissiamo come polo uno dei fuochi, per esempio F1 (vedi Figura 3.3), quindi QF1 = r.
Le coordinate ( x, y) di Q sono date da
x = ea + r cos θ
y = r sin θ
pertanto
QF1 = r = a − e(ea + r cos θ ) = a(1 − e2 ) − er cos θ =⇒
r (1 + e cos θ ) = a(1 − e2 ) =⇒ r (θ ) =
a (1 − e2 )
.
1 + e cos θ
Ponendo P = a(1 − e2 ), detto parametro dell’ellisse, otteniamo l’equazione dell’ellisse in coordinate polari:
r (θ ) =
P
.
1 + e cos θ
34
3.1 problema dei due corpi
Inoltre
b2 = a2 − c2 = a2 − e2 a2 = a2 (1 − e2 ) =⇒ b = a
p
1 − e2 = √
P
1 − e2
.
Il perielio si ha per θ = 0 quindi
rmin =
P
= a (1 − e )
1+e
mentre l’afelio è raggiunto in θ = π:
rmax =
P
= a (1 + e ).
1−e
Osserviamo infine che r (π/2) = P.
Consideriamo ora un corpo puntiforme di massa m in moto in un campo
centrale F = −k/r2 r̂ e soggetto al potenziale
k
k>0
r
1 l02
k
Ueff (r ) =
− .
2 mr2
r
U (r ) = −
Come visto precedentemente, dalla (3.8) si ottiene
l0 1
r m r2
2
dθ =
m
dr
E−
2
1 l0
2 mr2
+
k
r
.
Introducendo la variabile
w=
1
1
=⇒ dw = − 2 dr
r
r
abbiamo
dθ = − q
dw
2mE
l02
+
2km
w
l02
− w2
= −r
dw
2mE
l02
+
k 2 m2
l04
− w−
km
l02
2
con E ∈ (−mk2 /(2l02 ), 0). Notiamo che
A2 =
2mE k2 m2
+ 4 ≥0
l02
l0
con il segno di uguaglianza che vale quando E assume il valore minimo. Ponendo
x = w − km/l02 e integrando abbiamo
θ=−
Z
√
w − km
x
l02
q
= arccos + costante = arccos
+ costante =
2 2
2mE
A
A2 − x 2
+ k lm4
l2
dx
0
= arccos
l02
w
km
q
−1
1+
2El02
mk2
+ costante.
35
0
3.1 problema dei due corpi
Quindi risulta
l02 1
−1 =
mk r
s
2El02
cos(θ + θ0 )
mk2
1+
dove θ0 è la costante di integrazione. Senza perdita di generalità possiamo ruotare
il sistema di riferimento in modo che θ0 = 0 per cui
s
2
2El0
1
mk
= 2 1 + 1 +
cos θ .
r
mk2
l0
Ponendo inoltre
s
e=
1+
2El02
∈ (0, 1)
mk2
abbiamo
l02
mk
r=
1 + e cos θ
=
P
1 + e cos θ
con P = l02 /(mk ). Questa è l’equazione polare di un’ellisse pertanto abbiamo
dimostrato la
Legge (Prima legge di Keplero) - I pianeti (considerati puntiformi) descrivono orbite
ellittiche di cui il Sole occupa uno dei fuoci.
Ricordiamo che la velocità areolare è data da
Ṡ =
1 l0
1 l0
=⇒ dS =
dt =⇒ l0 dt = 2m dS.
2m
2m
L’area di un’ellisse vale πab, quindi integrando abbiamo:
Z T
0
l0 dt = l0 T = 2πmab
dove T è il periodo di rivoluzione del corpo. Ora osserviamo che
P
a=
=
1 − e2
l02
mk
2| E|l02
mk2
=
k
,
2| E |
quindi
2πmab
2πm 2
=
a
T=
l0
l0
r
m
3/2
= 2πa
.
k
p
2πm 2
1 − e2 =
a
l0
s
2| E|l02
= 2πa2
mk2
r
2m| E|
=
k2
Abbiamo infine ricavato anche la
Legge (Terza legge di Keplero) - Il quadrato del periodo di rivoluzione di un pianeta è
proporzionale al cubo del semiasse maggiore dell’orbita.
36
3.2 piccole oscillazioni
3.2
piccole oscillazioni
3.2.1 Impostazione del problema
Supponiamo di avere un sistema di N particelle con vincoli olonomi e scleronomi
con n gradi di libertà, soggette a forze conservative. Indichiamo con q1 , q2 , . . . , qn
le coordinate generalizzate e con V = V (q1 , . . . , qn ) l’energia potenziale. Il sistema
si dice in equilibrio nella configurazione q0 = (q01 , . . . , q0n ) se le forze generalizzate
che agiscono su di esso sono nulle, ossia:
∂V (q) Qj = −
=0
(∀ j = 1, . . . , n).
∂q j q=q
0
L’energia potenziale nella configurazione di equilibrio q0 ha un valore estremale
o in generale stazionario. Se tutte le velocità generalizzate nella configurazione di
equilibrio sono nulle, il sistema rimarrà nella posizione di equilibrio per un tempo
indefinito. Una configurazione di equilibrio si dice stabile se una piccola perturbazione del sistema provoca un moto che raggiunge configurazioni vicine; al contrario si dirà instabile se una perturbazione infinitesima provoca un allontanamento
indefinito da tale configurazione.
Noi intendiamo studiare il moto del sistema nelle immediate vicinanze di una
configurazione di equilibrio stabile, dove l’energia potenziale ha un minimo. Indichiamo con ηi gli spostamenti delle coordinate generalizzate dall’equilibrio;
ovvero:
qi = q0i + ηi
∀i = 1, . . . , n.
Consideriamo lo sviluppo dell’energia potenziale1 attorno alla configurazione di
equilibrio stabile q0 :
n
∂V 1 n
∂2 V V (q1 , . . . , qn ) = V (q01 , . . . , q0n ) + ∑
ηj + ∑
η j ηk + · · · .
∂q j q=q
2 j,k=1 ∂q j ∂qk q=q
j =1
0
Poiché per ipotesi
∂V (q) =0
∂q j q=q
0
∀ j = 1, . . . , n
0
e V (q01 , . . . , q0n ) è una costante che può essere posta uguale a zero senza perdere in generalità,2 abbiamo in definitiva, fermandoci al termine quadratico dello
sviluppo:
1 n
∂2 V 1 n
V ( q1 , . . . , q n ) =
η j ηk =
V jk η j ηk .
(3.15)
∑
2 j,k=1 ∂q j ∂qk q=q
2 j,k∑
=1
0
1 Supponiamo sempre le funzioni che trattiamo di grado opportuno.
2 Ricordiamo infatti che l’energia potenziale è definita a meno di una costante additiva.
37
3.2 piccole oscillazioni
La matrice n × n V = (V jk ) è una matrice simmetrica e reale. La condizione che
q0 sia una configurazione di minimo implica che ∀η = (η1 , . . . , ηn ) ∈ Rn si abbia
ηT V η =
n
∑
j,k =1
V jk η j ηk ≥ 0,
ovvero V è semidefinita positiva.
Anche l’energia cinetica può essere sviluppata in modo simile. Mostriamo prima che in presenza di vincoli olonomi e scleronomi l’energia cinetica è una forma
quadratica omogenea delle velocità generalizzate. Infatti, detta mk la massa della
k-esima particella e vk la sua velocità:3
!
N
N
n n
1 N
∂r
1
1
∂r
T = ∑ mk v2k = ∑ mk vk · vk = ∑ mk ∑ ∑ k k q̇i q̇ j
2 k =1
2 k =1
2 k =1
∂qi ∂q j
i =1 j =1
dove si è ricordato che
vk =
n
∂r
∑ ∂qkj q̇ j
j =1
=⇒ v2k =
n
n
∂r ∂r
∑ ∑ ∂qki ∂qkj q̇i q̇ j .
i =1 j =1
Ne consegue:
1 n n
T= ∑∑
2 i =1 j =1
N
∂r ∂r
∑ mk ∂qki ∂qkj
k =1
!
q̇i q̇ j
che è quanto era nostra intenzione dimostrare.
Considerando ora spostamenti ηi rispetto alla configurazione di equilibrio e
fermandoci al primo termine (quadratico) nelle η̇i , abbiamo:
"
#
N
1 n
∂rk ∂rk 1 n
T = ∑ ∑ mk
η̇
η̇
=
Tij η̇i η̇ j .
(3.16)
i j
2 i,j=1 k=1
∂qi ∂q j q=q
2 i,j∑
=1
0
La matrice (costante) T = (Tij ) è simmetrica, reale ed è definita positiva in senso
stretto, cioè
n
∑
i,j=1
Tij ai a j > 0
∀ a = ( a 1 , . . . , a n ) ∈ Rn \ { 0 } .
Pertanto i suoi autovalori sono reali e strettamente positivi e quindi T è senz’altro
diagonalizzabile.
La lagrangiana del sistema nelle approssimazioni fatte può scriversi:
L=
1 n
1 n
T
η̇
η̇
−
Vkj ηk η j .
kj k j
2 k,j∑
2 k,j∑
=1
=1
(3.17)
3 Indichiamo con rk il vettore posizione della k-esima particella rispetto a un punto O solidale con un
sistema di riferimento inerziale
38
3.2 piccole oscillazioni
Si vede che le ηi assumono de facto il ruolo di nuove coordinate generalizzate. La
k-esima equazione di Lagrange assume la forma:
d
∂L
∂L
−
=0
dt ∂η̇k
∂ηk
e cioè
1
2
n
1
n
∑ Tkj η̈j + 2 ∑ Vkj ηj = 0.
j =1
(3.18)
j =1
Posto η(t) = (η1 (t), . . . , ηn (t)), l’insieme delle equazioni può essere sintetizzato
nella scrittura
T η̈(t) + V η(t) = 0.
(3.19)
Le equazioni (3.18) (o l’equazione matriciale (3.19)) sono equazioni differenziali
del secondo ordine lineari a coefficienti costanti omogenee. Vedremo, ora, come
sia possibile scrivere un sistema di n equazioni differenziali del secondo ordine
lineari disaccoppiate perfettamente equivalente al sistema trovato.
Cerchiamo soluzioni delle (3.19) del tipo:
η = aeiωt
(3.20)
con ω ∈ R e a ∈ Rn \ {0} costante.4 Richiedendo che la (3.20) sia soluzione della
(3.19) otteniamo:
(−ω 2 T + V ) aeiωt = 0 ⇐⇒ (V − ω 2 T ) a = 0
dove ω 2 = λ ha il significato di autovalore e a 6= 0 di autovettore corrispondente.
Non si tratta però di un classico problema agli autovalori: infatti si tratta qui
di determinare gli autovalori della matrice V rispetto alla matrice T .5 Sarà importante far vedere che tutti i nostri autovalori sono maggiori o uguali a zero,
perché altrimenti ω non sarebbe reale.6 Gli autovalori di V rispetto a T sono dati
dall’equazione:
det(V − λT ) = 0.
(3.21)
Osservazione. Un autovalore λ deve rendere non invertibile V − λT ; inoltre la
somma delle molteplicità delle radici della (3.21) è uguale a n.
Ora, come detto T è diagonalizzabile, ovvero detta M = Diag(µ1 , . . . , µn ), dove
µk > 0 ∀k = 1, . . . , n sono gli autovalori di T non tutti necessariamente distinti,
4 Una soluzione fisicamente accettabile deve essere reale; naturalmente è la parte reale della (3.20)
che descrive il sistema.
5 Avremmo ancora il classico problema agli autovalori se T fosse proporzionale alla matrice identità
In .
6 Se ciò avvenisse avremmo un moto con andamento esponenziale (crescente o decrescente) con
conseguente allontanamento dalla posizione di equilibrio.
39
3.2 piccole oscillazioni
esiste una trasformazione di similitudine U matrice ortogonale a valori reali, cioè
U −1 = U T , tale che:
T = U T MU.
(3.22)
Ovviamente se T è già diagonale, allora T = M e U = In . Definiamo inoltre
√
√
M1 = Diag( µ1 , . . . , µn ). Si vede immediatamente che M1 è simmetrica a valori
reali positivi e che M = M12 . La (3.22) può essere riscritta:
T = U T M1 M1 U = ( M1 U )T M1 U.
(3.23)
Sia Ṽ la matrice simmetrica a valori reali definita positiva non in senso stretto,
che soddisfa la seguente relazione:
V = ( M1 U )T Ṽ M1 U.
(3.24)
Pertanto Ṽ e V sono legate da una trasformazione di congruenza. In base alle
(3.23) e alle (3.24), l’equazione (3.21) diventa
det[( M1 U )T Ṽ M1 U − λ( M1 U )T M1 U ] = 0 ⇐⇒
det[( M1 U )T ] det[Ṽ − λI ] det[ M1 U ] = 0 ⇐⇒
det[Ṽ − λI ] = 0.
ovvero trovare gli autovalori di V rispetto a T vuol dire trovare gli autovalori
(nel senso usuale) di Ṽ . I suoi autovalori saranno necessariamente, in virtù delle
proprietà già citate, maggiori o uguali a zero.
Ritorniamo ora all’equazione di Lagrange (3.19), che può essere riscritta per le
(3.23) e (3.24):
( M1 U )T M1 U η̈(t) + ( M1 U )T Ṽ M1 Uη(t) = 0 =⇒
( M1 U )T [ M1 U η̈(t) + Ṽ M1 Uη(t)] = 0 =⇒
M1 U η̈(t) + Ṽ M1 Uη(t) = 0
Se poniamo M1 Uη(t) = Ψ(t), otteniamo (ricordando che M1 U è una matrice
costante)
Ψ̈(t) + Ṽ Ψ(t) = 0.
(3.25)
Sappiamo che la matrice Ṽ , simmetrica e a valori reali, definita positiva non in
senso stretto, è diagonalizzabile. I suoi autovalori λi ≥ 0 non sono tutti necessariamente distinti. Sia Λ = Diag(λ1 , . . . , λn ) la matrice diagonale degli autovalori
di Ṽ . Esiste (essendo Ṽ diagonalizzabile) una matrice ortogonale S tale che
Ṽ = ST ΛS.
L’equazione (3.25) diventa perciò:
Ψ̈(t) + S T ΛSΨ(t) = 0 ⇐⇒ SΨ̈(t) + ΛSΨ(t) = 0.
40
3.2 piccole oscillazioni
Posto SΨ(t) = Q(t) = ( Q1 (t), . . . , Qn (t)) (ricordiamo che S è una matrice costante) abbiamo in definitiva
Q̈(t) + ΛQ(t) = 0
(3.26)
ovvero ∀k, ricordando che λk = ωk2 :
Q̈k (t) + ωk2 Qk (t) = 0
(k = 1, . . . , n)
(3.27)
cioè n oscillatori armonici disaccoppiati; ciascuno di essi vibra con una propria frequenza (modo normale). Le Qk vengono dette coordinate normali o principali. Osserviamo che le ωk2 non sono tutte necessariamente distinte e che se λk = 0, la k-esima
equazione è del tipo Q̈k = 0, quindi non si tratta di un oscillatore armonico.
3.2.2 Riepilogo
Q(t) = SΨ(t) = (SM1 U )η(t).
Osserviamo che se T = αIn , con α > 0, allora M1 =
√
αSη(t).
Se sono noti η(0), η̇(0), stato iniziale, si ha:
√
(3.28)
αIn , U = In e Q(t) =
Q(0) = (SM1 U )η(0),
Q̇(0) = (SM1 U )η̇(0).
Possiamo allora risolvere il sistema (3.26) con queste condizioni iniziali. Determinato Q = Q(t), abbiamo poi:
η(t) = SΨ(t) = (SM1 U )−1 Q(t).
3.2.3 Osservazioni
Abbiamo ottenuto, in concreto, nelle pagine precedenti il seguente risultato, noto
in algebra lineare:
Teorema - Siano date due matrici n × n simmetriche a valori reali, la prima T definita
positiva e la seconda V semidefinita positiva. Allora esiste una matrice invertibile a valori
reali C tale che
CT T C = I
(3.29)
C T V C = Diag(λ1 , . . . λn ) = Λ
(3.30)
dove i λ j ≥ 0 sono le radici dell’equazione caratteristica det(V − λT ) = 0.
41
3.2 piccole oscillazioni
Possiamo ovviamente scrivere λ j = ω 2j , con ω j ≥ 0. È facile far vedere, usando
le notazioni precedenti, che C −1 = SM1 U. In base alle relazioni (3.29) e (3.30) si
ottengono in modo agevolo e immediato i modi normali di vibrazione. Infatti:
T η̈(t) + V η(t) = 0 =⇒
C T T η̈(t) + C T V η(t) = 0 =⇒
C T T CC −1 η̈(t) + C T V CC −1 η(t) = 0 =⇒
(3.31)
Q = C −1 η
C −1 η̈(t) + ΛC −1 η(t) = 0 =⇒
Q̈(t) + ΛQ(t) = 0.
3.2.4 Un particolare problema
Siano dati N + 1 oscillatori di costante k vincolati agli estremi come in Figura 3.4.
Siano gli N oggetti a essi vincolati di massa m. La lunghezza a riposo di ciascuna
molla sia l0 cosicché la distanza tra le pareti sia ( N + 1)l0 . Indichiamo con x j (t) la
posizione della j-esima particella all’istante t e con la x0,j la sua posizione iniziale.
A riposo risulta x0,j − x0,j−1 = l0 . Posto x0 = x N +1 = 0, l’energia potenziale
elastica associata al sistema è
V=
N
1 2
1
1 N +1
kx1 + ∑ ( x j − x j−1 − l0 )2 + kx2N = k ∑ ( x j − x j−1 − l0 )2 .
2
2
2 j =1
j =2
Se ora indichiamo con q j la deviazione dalla posizione di equilibrio della j-esima
particella, cioè q j = x j − x0,j , posto q0 = q N +1 = 0, l’energia diventa
V=
1 N +1
1 N +1
2
k ∑ (q j + x0,j − q j−1 − x0,j−1 − l0 )2 = k ∑ (q j − q j−1 ) .
2 j =1
2 j =1
Osservando che q̇ j = ẋ j possiamo scrivere la lagrangiana del sistema:
L=
1 N 2 1 N +1
m
q̇ j − k ∑ (q j − q j−1 ).
2 j∑
2 j =1
=1
L’equazione del moto della j-esima particella è:
mq̈ j + k (2q j − q j−1 − q j+1 ) = 0.
Figura 3.4: Schema del problema.
42
3.2 piccole oscillazioni
D’ora in poi poniamo per semplicità nella trattazione m = 1. Indichiamo ora:
2 −1 0 · · · 0
0
−1 2 −1 . . . 0
0
q1
q2
0 −1 2 . . . 0
0
= kV 0 = ω2 V 0 .
q=
V = k
0
..
. . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
qN
..
0
. 2 −1
0
0
0
0
0 · · · −1 2
La matrice V 0 (e quindi anche V ) è simmetrica definita positiva. Infatti sia
assegnato un vettore x di dimensioni opportune,
xT V 0 x =
N −1
∑ V0,ij xi x j = x12 + ∑ (xi − xi+1 )2 + x2N ≥ 0.
i =1
i,j
La quantità sopra è nulla solo se x è il vettore nullo. Le equazioni del moto
possono sintetizzarsi nella relazione:
q̈ + V q = 0.
Per risolvere il nostro problema occorre trovare gli autovalori della matrice V 0 .
Essendo la matrice simmetrica definita positiva gli autovalori saranno tutti reali e
positivi. Abbiamo visto che l’energia potenziale è data da
V (q) =
1
1 N
1
1
(q, V q) = kq21 + k ∑ (q j − q j−1 )2 + kq2N .
2
2
2 j =2
2
(3.32)
Se x = ( x1 , x2 , . . . , x N ) è un autovettore associato all’autovalore λ abbiamo
N
( x, V 0 x) = ( x, λx) = λ( x, x) = λ ∑ x2j = λk xk2 .
j =1
D’altra parte dalla (3.32) risulta
N
( x, V 0 x) = x12 + ∑ ( x j − x j−1 )2 + x2N .
j =2
Inoltre
( x j − x j−1 )2 = x2j − 2x j x j−1 + x2j−1 ≤ 2x2j + 2x2j−1
e
N
N −1
j =2
j =2
∑ x2j = ∑
x2j + x2N ,
N
N −1
j =2
i =1
∑ x2j−1 =
∑
xi2 = x12 +
N −1
∑
j =2
x2j
43
(3.33)
3.2 piccole oscillazioni
quindi
N
N
N
j =2
j =2
j =2
∑ (x j − x j−1 )2 ≤ 2 ∑ x2j + 2 ∑ x2j−1 =
= 2x2N + 2
N −1
∑
j =2
N −1
∑
x2j + 2
= 2x12 + 2x2N + 4
N −1
∑
j =2
j =2
x2j + 2x12 =
x2j .
Pertanto
( x, V 0 x) ≤ 3x12 + 3x2N + 4
N −1
∑
j =2
N
x2j < 4 ∑ x2j = 4k xk2 .
j =1
(3.34)
L’ultima maggiorazione è stretta perché, dovendo essere x 6= 0 in quanto autovettore deve risultare necessariamente x1 , x N 6= 0. Infatti, partendo dall’equazione
(V 0 − λI ) x = 0 abbiamo che la prima componente è
(2 − λ) x1 − x2 = 0.
Ma se x1 = 0 allora x2 = 0. La seconda componente del vettore è
− x1 + (2 − λ ) x2 − x3 = 0
che implica x3 = 0. Procedendo in questo modo si troverebbe quindi che x = 0.
Confrontando la (3.33) con la (3.34) ricaviamo che 0 < λ < 4.
Per trovare gli autovalori procediamo ora nel modo solito. Indichiamo con
D N (λ) = det(V 0 − λIN ). Osserviamo che
D1 = 2 − λ,
2 − λ −1 = (2 − λ)2 − 1.
D2 = −1 2 − λ In generale, vista la struttura della matrice si vede che D N (λ) = (2 − λ) D N −1 (λ) −
D N −2 (λ). Per risolvere questo problema adottiamo un sistema simile a quello che
si può utilizzare per trovare la forma chiusa della successione di Fibonacci (si
veda l’Appendice B), cerchiamo cioè soluzioni del tipo D N (λ) = µ N , con µ 6= 0.
L’equazione diventa:
µ N − (2 − λ)µ N −1 + µ N −1 = 0 ⇐⇒ µ2 − (2 − λ)µ + 1 = 0 =⇒
p
2 − λ ± (2 − λ )2 − 4
= cos θ ± i sin θ = e±iθ
µ1,2 =
2
dove si è effettuata l’opportuna sostituzione 2 cos θ = 2 − λ (in virtù del fatto
che λ ∈ ]0, 4[) e si è tenuto conto delle relazioni di Eulero. Ora occorre trovare
a, ã ∈ C tali che D N (λ) = a(λ)eiNθ + ã(λ)e−iNθ e affinché la soluzione sia reale ã
44
3.2 piccole oscillazioni
deve essere il complesso coniugato di a. Imponiamo come “condizioni iniziali” i
due determinanti già noti:
D2 (λ) = ae2iθ + āe−2iθ = (2 − λ)2 − 1 = 4 cos2 θ − 1 = e2iθ + e−2iθ + 1
D1 (λ) = aeiθ + āe−iθ = 2 − λ = 2 cos θ = eiθ + e−iθ
2iθ
( a − 1)e2iθ + ( ā − 1)e2iθ = 1
be + b̄e2iθ = 1
⇐⇒
( a − 1)eiθ + ( ā − 1)e−iθ = 0
beiθ + b̄e−iθ = 0
ove si è posto b = a − 1. Risolvendo il sistema si ha
b(λ) =
e−iθ
eiθ
=⇒
a
=
,
eiθ − e−iθ
eiθ − e−iθ
ā = −
e−iθ
.
eiθ − e−iθ
Perciò:
D N (λ) =
sin [( N + 1)θ ]
ei ( N + 1 ) θ − e − i ( N + 1 ) θ
2i sin [( N + 1)θ ]
=
=
iθ
−
iθ
2i sin θ
sin θ
e −e
Poiché siamo alla ricerca degli zeri della funzione, occorre che sia
sin[θ ( N + 1)] = 0,
cioè
θm =
mπ
N+1
m = 1, . . . , N.
Ricordando la relazione che lega θ a λ, è necessario che
λm = 4 sin2
mπ
.
2( N + 1)
Gli autovalori sono tutti distinti. Le frequenze del sistema sono
2
ωm
= ω02 λm = 4ω02 sin2
mπ
.
2( N + 1)
Sia ora Λ = (δij λi )i,j=1,...,N . Cerchiamo la matrice S tale che V 0 = S T ΛS. È noto
che per costruire la matrice S occorre disporre degli autovettori. Perciò in generale,
per m = 1, . . . , N, da (V 0 − λm I ) xm = 0, ponendo come al solito 2 − λm = 2 cos θm
e xm,1 = γm sin θm
(
2
−
λ
)
x
−
x
=
0
xm,1 = γm sin θm
m
m,2
m,1
− xm,1 + (2 − λm ) xm,2 − xm,3 = 0
xm,2 = 2γm sin θm cos θm = γm sin(2θm )
=⇒
.
...
...
− xm,N −1 + (2 − λm ) xm,N = x0
xm,N = γm sin( Nθm )
Possiamo perciò scrivere:
mπ
sin
N + 1
2mπ
sin
x m = γm
N
+
1
...
Nmπ
sin
N+1
45
3.2 piccole oscillazioni
dove γm è una costante da scegliere opportunamente. Per esempio, volendo
normalizzare l’autovettore:
N
N
1 − cos(2jθm )
=
2
j =1
2
1 = k x m k 2 = γm
∑ sin2 ( jθm ) = γm2 ∑
j =1
N
γ2
= m
2
N − ∑ cos(2jθm )
!
j =1
=
2
γm
( N + 1).
2
L’ultima uguaglianza deriva dal fatto che
N
N
∑ cos(2jθm ) = ∑ <ei2jθ
j =1
j =1
N
m
= < ∑ ei2jθm .
j =1
Questa è una progressione geometrica di ragione ei2θm quindi:
N
N
j =1
j =1
∑ cos(2jθm ) = < ∑ ei2jθm = <
Perciò γm =
autovettore è
p
ei2( N +1)θm − e2iθm
= −1.
e2iθm − 1
2/( N + 1) (osserviamo che γm non dipende da m) e l’m-esimo
mπ
N + 1
r
2mπ
2
sin
xm =
.
N
+
1
N+1
...
Nmπ
sin
N+1
sin
La matrice S ha per righe gli autovettori xm ed è quindi definita da
r
2
mjπ
Smj = xm,j =
sin
.
N+1
N+1
Poiché xm,j = x j,m la matrice S è simmetrica, cioè S = S T . Inoltre, avendo normalizzato gli autovettori xm , risulta ( xm , xn ) = δmn pertanto si ha anche S = S−1 da
cui S2 = IN . Ricordando poi che
Qm =
N
∑ Smj q j
j =1
è possibile individuare mediante queste trasformazioni come stimolare il sistema
(ovvero come agire sulle q j ) per ottenere il moto normale associato alla coordinata
Qm .
46
4
FORMALISMO HAMILTONIANO
4.1
equazioni di hamilton
Vedremo ora una formulazione diversa della meccanica, nota come formulazione
hamiltoniana. La sua rilevanza risiede nel fatto che è in grado di fornire un’impostazione teorica adatta a essere estesa ad altre aree della fisica. Così, per esempio
l’approccio hamiltoniano costituisce il linguaggio con cui è formulata la meccanica
quantistica.
Nella formulazione hamiltoniana della meccanica si descrive il modo di un sistema di particelle con un insieme di equazioni differenziali del primo ordine
(ricordiamo che le equazioni di Lagrange, tipiche della formulazione lagrangiana, sono equazioni differenziali del secondo ordine). Il numero complessivo di
condizioni iniziali in grado di determinare in modo univoco il moto dovrà sempre essere uguale a 2n, dove n è il numero di gradi di libertà del sistema di
particelle. Di conseguenza nell’approccio hamiltoniano dovranno esserci 2n equazioni differenziali del primo ordine, le quali descriveranno l’evoluzione del punto
rappresentativo del sistema in uno spazio 2n-dimensionale, detto spazio delle fasi.
Avremo allora 2n coordinate indipendenti in grado di definire lo stato del sistema.
Un modo naturale, anche se non unico, per introdurle è, nota la lagrangiana del
sistema, associare a ogni coordinata generalizzata qk , con k = 1, . . . , n, un’altra
coordinata data dal momento coniugato a essa, cioè pk = ∂L/∂q̇k . Le variabili
(q, p) sono dette canoniche. Si passa, in ultima analisi, dal sistema di variabili (q, q̇, t), proprio della formulazione lagrangiana, al sistema di nuove variabili
(q, p, t), con il quale possiamo formulare la meccanica hamiltoniana. Il metodo
che ci permette di passare da un sistema all’altro è fornito dalle trasformazioni
di Legendre (per un approfondimento sulle trasformazioni di Legendre si veda
l’Appendice A). Studieremo prima un caso semplice, cioè un sistema a un solo
grado di libertà. Sia L = L(q, q̇, t) la lagrangiana del sistema. Abbiamo:
dL =
∂L
∂L
∂L
∂L
dq +
dq̇ +
dt = ṗ dq + p dq̇ +
dt
∂q
∂q̇
∂t
∂t
(4.1)
dove abbiamo utilizzato la definizione di momento coniugato p = ∂L/∂q̇ e l’ed ∂L
quazione di Lagrange ∂L/∂q = dt
∂q̇ = ṗ. L’hamiltoniana del sistema H( q, p, t ) è
definita mediante la seguente trasformazione detta di Legendre:
H(q, p, t) = q̇p − L(q, q̇, t).
(4.2)
47
4.1 equazioni di hamilton
Notiamo che l’hamiltoniana risulta in realtà funzione di (q, p, t) solo dopo aver
espresso q̇ in funzione di (q, p, t) utilizzando la relazione p = ∂L(q, q̇, t)/∂q̇. Valgono le seguenti relazioni:
dH =
∂H
∂H
∂H
dq +
dp +
dt
∂q
∂p
∂t
(4.3)
Inoltre, per le (4.1) e (4.2), si ha
dH = q̇ dp + p dq̇ − ṗ dq − p dq̇ −
∂L
∂L
dt = q̇ dp − ṗ dq −
dt
∂t
∂t
Dal confronto tra la (4.3) e la (4.4) emerge che
∂H(q, p, t)
= q̇
∂p
∂H(q, p, t)
= − ṗ
∂q
(4.4)
(4.5)
e
∂H
∂L
=− .
∂t
∂t
(4.6)
Le relazioni (4.5) sono dette equazioni di Hamilton e costituiscono un sistema di due
equazioni differenziali del primo ordine nelle due variabili indipendenti (coordinate canoniche) q e p. Queste nuove variabili definiscono lo stato del sistema nel
cosiddetto spazio delle fasi, che è ovviamente di dimensione 2.
La procedura precedente si può generalizzare al caso di un sistema avente n
gradi di libertà. Sia L = L (q, q̇, t) la lagrangiana del sistema, con q = (q1 , . . . , qn )
e q̇ = (q̇1 , . . . , q̇n ). Si ha:
dL =
=
n
n
∂L
∂L
∂L
dq
+
∑ ∂q j j ∑ ∂q̇ j dq̇ j + ∂t dt =
j =1
j =1
n
∑
j =1
∂L
dt
ṗ j dq j + p j dq̇ j +
∂t
(4.7)
(si è utilizzato ∂L/∂q̇ j = p j e ∂L/∂q j =
d ∂L
dt ∂q̇ j
= ṗ j ). Posto p = ( p1 , . . . , pn ),
possiamo come prima definire l’hamiltoniana del sistema in funzione di (q, p, t)
mediante la trasformazione di Legendre
H(q, p, t) =
n
∑ q̇ j p j − L(q, q̇, t).
(4.8)
j =1
Avremo allora
dH =
n
∑
j =1
∂H
∂H
dq j +
dp j
∂q j
∂p j
+
∂H
dt
∂t
48
(4.9)
4.1 equazioni di hamilton
e, per la (4.7) e la (4.8),
dH =
n
n
j =1
j =1
∑ (q̇ j dp j + p j dq̇ j ) − ∑ ( ṗ j dq j + p j dq̇ j ) −
∂L
dt =
∂t
n
∂L
= ∑ (q̇ j dp j − ṗ j dq j ) −
dt.
∂t
j =1
Dalla (4.9) e dalla (4.10) si deduce che per i = 1, . . . , n
∂H(q, p, t)
= q̇i
pi
∂H(q, p, t)
= − ṗi
qi
(4.10)
(4.11)
e
∂H
∂L
=− .
∂t
∂t
(4.12)
Le equazioni (4.11) vengono chiamate, come nel caso di un solo grado di libertà,
equazioni di Hamilton e costituiscono 2n equazioni differenziali nelle variabili
canoniche q e p.
In conclusione, la costruzione dell’hamiltoniana avviene attraverso i seguenti
passaggi:
• si costruisce la lagrangiana L in funzione delle coordinate generalizzate q,
delle velocità generalizzate q̇ ed eventualmente del tempo t attraverso la
relazione L = T − V (supponendo le forze derivanti da un unico potenziale
o potenziale generalizzato);
• si definiscono i momenti coniugati pi attraverso la relazione
pi =
∂L(q, q̇, t)
∂q̇i
(i = 1, . . . , n);
(4.13)
• si scrive l’hamiltoniana del sistema utilizzando la trasformazione di Legendre (4.8) (ovviamente in questa scrittura intervengono q, q̇, p e t);
• a partire dalle (4.13) si cerca di ottenere q̇ in funzione di q, p e t;
• con l’ausilio del risultato precedente si può, infine, esprimere l’hamiltoniana
H in funzione di q, p e t.
Esercizi
1. Si consideri una particella di massa m in un campo conservativo. Sia U =
U (r ) l’energia potenziale. Scrivere l’hamiltoniana del sistema
a) in coordinate cartesiane;
b) in coordinate sferiche;
49
4.1 equazioni di hamilton
c) in coordinate cilindriche.
Soluzione. In coordinate cartesiane x, y, z la lagrangiana della particella è
L=
1
m( ẋ2 + ẏ2 + ż2 ) − U ( x, y, z).
2
Abbiamo:
∂L
px
= m ẋ =⇒ ẋ =
∂ ẋ
m
py
∂L
= mẏ =⇒ ẏ =
py =
∂ẏ
m
pz
∂L
= mż =⇒ ż = .
pz =
∂ż
m
px =
Quindi, per la (4.8) e tenendo presenti le relazioni fra le velocità generalizzate e i momenti coniugati appena determinate, l’hamiltoniana è
H = ẋp x + ẏpy + żpz − L =
1
1
= ( p2x + p2y + p2z ) −
( p2 + p2y + p2z ) + U ( x, y, z) =
m
2m x
1
=
( p2 + p2y + p2z ) + U ( x, y, z).
2m x
In coordinate sferiche r, θ, φ la lagrangiana della particella è
L=
1
m(ṙ2 + r2 θ̇ 2 + r2 sin2 θ φ̇2 ) − U (r, θ, φ).
2
Calcoliamo i momenti coniugati e le relazioni fra le velocità generalizzate e
questi:
∂L
pr
= mṙ =⇒ ṙ =
∂ṙ
m
∂L
p
pθ =
= mr2 θ̇ =⇒ θ̇ = θ2
mr
∂θ̇
pφ
∂L
2
2
pφ =
= mr sin θ φ̇ =⇒ φ̇ =
.
2
∂φ̇
mr sin2 θ
pr =
Dunque l’hamiltoniana è
H = ṙpr + θ̇ pθ + φ̇pφ − L =
p2φ
p2
p2r + 2θ +
r
r2 sin2 θ
1
=
m
=
1
2m
p2r +
!
p2φ
p2θ
+
r2
r2 sin2 θ
1
−
2m
!
p2φ
p2
p2r + 2θ +
r
r2 sin2 θ
!
+ U (r, θ, φ) =
+ U (r, θ, φ).
Infine, nelle coordinate cilindriche r, φ, z la lagrangiana della particella si
scrive:
L=
1
m(ṙ2 + r2 φ̇2 + ż2 ) − U (r, φ, z).
2
50
4.1 equazioni di hamilton
Come al solito troviamo i momenti coniugati e poi esprimiamo le velocità
generalizzate in funzione dei momenti:
∂L
pr
= mṙ =⇒ ṙ =
∂ṙ
m
pφ
∂L
= mr2 φ̇ =⇒ φ̇ =
pφ =
mr2
∂φ̇
∂L
pz
pz =
= mż =⇒ ż = .
∂ż
m
pr =
Abbiamo che l’hamiltoniana è data da:
H = ṙpr + φ̇pφ + żpz − L =
!
!
p2φ
p2φ
1
1
2
2
2
2
=
pr + 2 + p z −
pr + 2 + pz + U (r, φ, z) =
m
r
2m
r
!
p2φ
1
=
p2r + 2 + p2z + U (r, φ, z).
2m
r
2. Scrivere l’hamiltoniana di una particella di massa m e carica q in un campo
elettromagnetico, i cui potenziali sono rispettivamente φ e A.
Soluzione. Nel Capitolo 1 abbiamo visto che la lagrangiana della particella
carica nel campo elettromagnetico è data da
L=
1 2
q
mv − qφ + A · v.
2
c
I momenti coniugati sono allora
q
p = ∇v L = mv + A.
c
Da qui ricaviamo la velocità in funzione dei momenti coniugati:
v=
1 q p− A .
m
c
Allora l’hamiltoniana è:
H = v· p−L =
1 1 q 2
1 2 q
q
q A· p− A =
=
p − A · p − m 2 p − A + qφ −
m
c
2 m
c
mc
c
2
2
1
q
q
1
q
=
p2 − 2 A · p + 2 A2 −
p − A + qφ =
m
c
c
2m
c
1 q 2
=
p − A + qφ.
2m
c
51
4.1 equazioni di hamilton
Possiamo anche scrivere le sei equazioni di Hamilton che descrivono il moto
della particella:
∂H
1 q ∂φ
ẋ =
=
px − Ax + q
∂p x
m
c
∂p x
∂H
1
q
∂φ
ẏ =
=
py − Ay + q
∂py
m
c
∂py
∂H
1 ∂φ
q ż =
=
pz − Az + q
∂pz
m
c
∂pz
∂H
1
q ∂A x
∂φ
q
ṗ x = −
=
−q
px − Ax
∂x
m
c
c ∂x
∂x
∂H
1 q q ∂Ay
∂φ
ṗy = −
=
py − Ay
−q
∂y
m
c
c ∂y
∂y
1 ∂φ
∂H
q q ∂Az
=
−q .
ṗz = −
pz − Az
∂z
m
c
c ∂z
∂z
Se i potenziali φ e A non dipendono esplicitamente dalle coordinate allora
il momento coniugato p risulta costante.
4.1.1 Un esempio
Supponiamo che le equazioni che definiscono le coordinate generalizzate non
dipendano esplicitamente dal tempo e che le forze in gioco derivino da un potenziale V funzione solo delle coordinate generalizzate. Vogliamo vedere come
possiamo scrivere l’hamiltoniana del sistema. Siano n i gradi di libertà e siano
q1 , . . . , qn le coordinate generalizzate. È semplice dimostrare che l’energia cinetica
si può scrivere
T=
1 n
τij (q)q̇i q̇ j
2 i,j∑
=1
dove q = (q1 , . . . , qn ). La lagrangiana è data da
L = T − V ( q ).
Il momento coniugato a qi è
pi =
∂L
=
∂q̇i
n
∑ τij (q)q̇ j .
j =1
La matrice simmetrica τ = τij è definita positiva ed è quindi invertibile. Allora
q̇ j =
n
∑
i =1
τ −1
ij
pi .
Si può dimostrare che nel nostro caso l’hamiltoniana è uguale all’energia totale,
cioè
H=
n
∑ q̇i pi − L(q, q̇) = T + V.
i =1
52
4.2 notazione simplettica
Osserviamo che
n 1 n
−1
−1
τ
(
q
)
τ
τ
pk pl =
ij
∑
2 i,j∑
ik
jl
=1
k,l =1
1 n −1 =
∑ τ ik δil pk pl =
2 i,k,l
=1
n 1
= ∑ τ −1 p i p k .
2 i,k=1
ik
T=
In definitiva otteniamo che:
H=
1 n −1 p i p k + V ( q ).
τ
2 i,k∑
jk
=1
Se τ è diagonale, lo sarà anche la sua inversa e dunque
H=
4.2
1 n −1 τ
p i 2 + V ( q ).
2 i∑
ii
=1
notazione simplettica
Le equazioni di Hamilton non trattano le coordinate generalizzate e i momenti
coniugati in modo simmetrico, come si evince immediatamente dalle (4.5). Accenniamo qui brevemente a un modo elegante di scrivere queste equazioni in forma
unitaria attraverso la cosiddetta notazione simplettica.
Se il sistema ha n gradi di libertà, possiamo costruire un vettore colonna formato
da 2n elementi (righe), e cioè:
ηi = q i ,
(i = 1, . . . , n)
ηi + n = p i .
Il vettore colonna così costruito è dato da
q1
..
.
qn
η=
p1 .
.
..
pn
Si ha ovviamente
∂H
∂H
=
,
∂ηi
∂qi
∂H
∂H
=
.
∂ηi+n
∂pi
(i = 1, . . . , n)
53
4.3 coordinate cicliche e metodo di routh
Definiamo la seguente matrice 2n × 2n formata da quattro matrici n × n:
J=
0n In
− In 0n
dove In è la matrice identità n × n e 0n è la matrice nulla n × n. Notiamo che
0n − In
J T = J −1 =
.
In 0n
Si vede che J −1 = − J. Allora J 2 = − I2n e det J = 1. La matrice J è detta
matrice simplettica standard. Possiamo scrivere le equazioni di Hamilton nel modo
seguente
η̇k =
2n
∂H
∑ Jkj ∂ηj
j =1
(k = 1, . . . , 2n)
o in maniera sintetica
η̇ = J
∂H
.
∂η
Per maggiore chiarezza esplicitiamo il caso bidimensionale:
q̇1
0
0
q̇2 0
0
=
ṗ1 −1 0
ṗ2
0 −1
1
0
0
0
− ṗ1
0
1
− ṗ2 .
0 q̇1
q̇2
0
Questa notazione è detta simplettica.
4.3
coordinate cicliche e metodo di routh
Sia H = H(q, p, t) l’hamiltoniana del sistema di particelle con n gradi di libertà, dove q = (q1 , . . . , qn ) e p = ( p1 , . . . , pn ) sono le coordinate canoniche (indipendenti).
Si ha:
dH
=
dt
n
∂H
n
∂H
∑ ∂q j q̇ j + ∑ ∂p j ṗ j +
j =1
j =1
∂H
.
∂t
(4.14)
Per le equazioni di Hamilton (4.5) e per la (4.12), la (4.14) diventa:
n
n
dH
∂H
∂H
∂L
= − ∑ ṗ j q̇ j + ∑ q̇ j ṗ j +
=
=−
dt
∂t
∂t
∂t
j =1
j =1
(4.15)
dove L è la lagrangiana del nostro sistema. Si vede, allora, che l’hamiltoniana è
una costante del moto se non dipende in modo esplicito dal tempo (o, in maniera
equivalente, se la lagrangiana non dipende esplicitamente dal tempo).
54
4.3 coordinate cicliche e metodo di routh
Abbiamo avuto già modo di osservare che, se le equazioni di trasformazione che definiscono le coordinate generalizzate non dipendono esplicitamente dal
tempo e se il potenziale dipende solo dalle coordinate generalizzate, allora H coincide con l’energia totale ed è una costante del moto. Il fatto che H coincida con
l’energia totale e sia una costante del moto sono due risultati in qualche modo indipendenti. Possono cioè verificarsi situazioni in cui l’hamiltoniana è una costante
del moto ma non è uguale all’energia totale, e viceversa.1
Se qn è una coordinata ciclica, allora pn = ∂L/∂q̇n è una costante del moto. In
questo caso l’hamiltoniana del sistema sarà funzione della costante pn e non, ovviamente, di qn . Ponendo pn = α, abbiamo H = H(q1 , . . . , qn−1 ; p1 , . . . , pn−1 ; α; t),
cioè l’hamiltoniana è di fatto funzione di sole 2(n − 1) coordinate, essendo α
costante. Possiamo poi studiare l’evoluzione temporale delle coordinate generalizzate qn attraverso l’equazione canonica q̇n = ∂H/∂α.
Si possono combinare i vantaggi della formulazione hamiltoniana nel trattare le
coordinate cicliche con quelli della formulazione lagrangiana per lo studio delle
coordinate non cicliche con un metodo dovuto a Routh. In sostanza si effettua
una trasformazione di Legendre per passare dal sistema (q, q̇) al sistema (q, p)
solo per le coordinate cicliche, ricavando per esse le equazioni del moto in forma hamiltoniana mentre le rimanenti equazioni del moto rimangono espresse in
forma lagrangiana.
Supponiamo che qs+1 , . . . , qn siano coordinate cicliche. Introduciamo la seguente funzione di Routh (o routhiana):
R(q1 , . . . , qn ; q̇1 , . . . , q̇s ; ps+1 , . . . , pn ; t) =
n
∑
j = s +1
q̇ j p j − L(q1 , . . . , qn ; q̇1 , . . . , q̇n ; t) (4.16)
dove L è, ovviamente, la lagrangiana del sistema (notare che nella (4.16) non è
stata ancora inserita l’informazione che qs+1 , . . . , qn sono cicliche). Dalla (4.16)
otteniamo:
n
s ∂L
∂L
dR = ∑ (dq̇ j p j + q̇ j dp j ) − ∑
dq j +
dq̇ j +
∂q j
∂q̇ j
j = s +1
j =1
(4.17)
n ∂L
∂L
∂L
− ∑
dq j +
dq̇ j − .
∂q j
∂q̇ j
∂t
j = s +1
Tenendo presente che per j = s + 1, . . . , n
∂L
= pj
∂q̇ j
∂L
=0
∂q j
la (4.17) diventa:
dR =
n
∑
j = s +1
s
q̇ j dp j − ∑
j =1
∂L
∂L
dq j +
dq̇ j
∂q j
∂q̇ j
−
∂L
.
∂t
(4.18)
1 Per una discussione articolata, arricchita da esempi, rimandiamo alla lettura di Goldstein, Poole e
Safko [4, pagine 328–332].
55
4.3 coordinate cicliche e metodo di routh
Dalla (4.18) si deduce che
∂L
∂R
=−
∂q j
∂q j
per j = 1, . . . , s
∂R
∂L
=−
∂q̇ j
∂q̇ j
∂R
=0
∂q j
per j = s + 1, . . . , n
∂R
= q̇ j
∂p j
Allora le equazioni di Lagrange per j = 1, . . . , s si possono scrivere mediante la
funzione di Routh:
d ∂R
∂R
−
= 0.
dt ∂q̇ j
∂q j
In conclusione la funzione di Routh è una funzione di Hamilton in rapporto alle coordinate cicliche qs+1 , . . . , qn e una funzione di Lagrange in rapporto alle
coordinate non cicliche q1 , . . . , qs . Osserviamo ad abundantiam che le coordinate
cicliche non compaiono esplicitamente nella lagrangiana e, quindi, nella funzione
di Routh, cioè:
R = R(q1 , . . . , qs ; q̇1 , . . . , q̇s ; ps+1 , . . . , pn ; t)
dove, per j = s + 1, . . . , n, i p j sono integrali primi del moto.
Vediamo un piccolo esempio. Una particella di massa m si muove in un campo
di forze centrali il cui potenziale è U = U (r ) con r distanza della particella dal
centro di forza. Sappiamo che il moto avviene in un piano (sempre che il momento
angolare rispetto al centro di forza, che è costante, sia diverso da zero). Possiamo
esprimere la lagrangiana della particella in tale piano in coordinate polari. Si ha:
L=
1
m(ṙ2 + r2 θ̇ 2 ) − U (r ).
2
Chiaramente θ è una coordinata ciclica. La funzione di Routh è definita nel modo
seguente:
R = θ̇ pθ − L,
dove pθ = ∂L/∂θ̇ = mr2 θ̇ è il momento coniugato a θ. Con semplici calcoli si
ricava che:
R=
1 p2θ
1
− mṙ2 + U (r ).
2
2m r
2
Osserviamo che ∂R/∂θ = 0 (e dunque pθ è una costante del moto), mentre
∂R/∂pθ = θ̇ = pθ /(mr2 ). Inoltre
d ∂R
∂R
−
= 0,
dt ∂ṙ
∂r
56
4.4 principio variazionale di hamilton modificato
cioè
mr̈ −
p2θ
+ U 0 (r ) = 0
mr3
(ricordiamo che −U 0 (r )r̂ è la forza centrale agente sulla particella).
Il metodo di Routh, che, in certi casi, può tornare utile ai fini del calcolo, non
è, in definitiva, altro che un ibrido concettuale tra la formulazione lagrangiana e
quella hamiltoniana, senza nulla aggiungere di sostanziale all’analisi e allo studio
di un sistema meccanico.
4.4
principio variazionale di hamilton modificato
Abbiamo visto che le equazioni di
R tLagrange possono essere ottenute dal principio
di Hamilton imponendo δS = δ t01 L(q, q̇, t) dt = 0, richiedendo cioè che il moto
reale, fra tutti i moti ammissibili nello spazio delle configurazioni, sia quello che
rende stazionaria l’azione. Se vogliamo dedurre le equazioni di Hamilton da un
principio variazionale occorre, in qualche modo, modificare il precedente principio, perché l’integrale possa essere valutato su percorsi del punto rappresentativo
del sistema nello spazio delle fasi. Nell’approccio hamiltoniano le coordinate
canoniche q e p sono considerate indipendenti nello spazio delle fasi; di conseguenza devono essere considerate indipendenti anche le loro variazioni. L’idea è
di considerare l’azione scritta nel modo seguente:
!
Z
S[q(t), p(t)] =
t1
t0
n
∑ p j q̇ j − H(q, p, t)
j =1
dt
(4.19)
con (q(t0 ) = q0 , p(t0 ) = p0 ) e (q(t1 ) = q1 , p(t1 ) = p1 ). Un moto nello spazio delle
fasi (q̃(t), p̃(t)) è ammissibile se (q̃(t0 ) = q0 , p̃(t0 ) = p0 ) e (q̃(t1 ) = q1 , p̃(t1 ) =
p1 ). Il moto reale nello spazio delle fasi è quello tra i moti ammissibili che rende
stazionaria l’azione (4.19), cioè
!
Z
δS = δ
t1
t0
n
∑ p j q̇ j − H(q, p, t)
j =1
dt = 0.
Questo principio variazionale di Hamilton modificato ha esattamente la stessa
forma variazionale tipica in uno spazio delle configurazioni di dimensione 2n.
Ripetendo i ragionamenti fatti nel Capitolo 2, otteniamo 2n equazioni di tipo
Lagrange (o di Eulero-Lagrange), cioè
#)
#
(
"
"
n
n
d
∂
∂
p j q̇ j − H(q, p, t)
−
p j q̇ j − H(q, p, t) = 0 ⇐⇒
dt ∂q̇k j∑
∂qk j∑
=1
=1
⇐⇒ ṗk +
57
∂H
= 0,
∂qk
4.5 parentesi di poisson
d
dt
(
∂
∂ ṗk
"
n
∑ p j q̇ j − H(q, p, t)
#)
j =1
∂
−
∂pk
"
n
∑ p j q̇ j − H(q, p, t)
j =1
⇐⇒ q̇k −
#
= 0 ⇐⇒
∂H
=0
∂pk
che sono nell’ordine la seconda e la prima equazione di Hamilton. Osserviamo
infine che il principio variazionale di Hamilton modificato è formulato in modo
tale che agli estremi per i = 1, . . . , n non solo δqi = 0 ma anche δpi = 0. Una conseguenza immediata di questa considerazione è che, se F (q, p, t) è una funzione
di classe opportuna (liscia), allora
n
∑ p j q̇ j − H(q, p, t) +
j =1
dF (q, p, t)
dt
(4.20)
dà luogo alle stesse equazioni di Hamilton.
4.5
parentesi di poisson
Supponiamo di avere un sistema lagrangiano con n gradi di libertà. Indichiamo come al solito con q = (q1 , . . . , qn ) le coordinate generalizzate e con p =
( p1 , . . . , pn ) i momenti coniugati individuando così il nostro sistema (q, p) di coordinate canoniche. Sia H(q, p, t) l’hamiltoniana del sistema. Supponiamo di avere
una funzione f (q, p, t) : F × R → R di classe opportuna, indicato con F lo spazio
delle fasi. Una funzione siffatta è detta anche variabile dinamica. Tenendo conto
delle equazioni di Hamilton si ha:
n df
∂f
∂f
∂f
=∑
q̇ j +
ṗ j +
=
dt
∂q
∂p
∂t
j
j
j =1
n ∂ f ∂H
∂f
∂f
∂ f ∂H
−
+
= { f , H}q,p +
=∑
∂q j ∂p j
∂p j ∂q j
∂t
∂t
j =1
dove
{ f , H}q,p =
n
∑
j =1
∂ f ∂H
∂ f ∂H
−
∂q j ∂p j
∂p j ∂q j
è detta parentesi di Poisson2 di f e H rispetto al sistema di coordinate canoniche
(q, p). Si noti che l’ordine delle variabili (q, p) non è indifferente. Si vede subito
che f è una costante del moto se { f , H}q,p + ∂ f /∂t = 0. In particolare se la
variabile dinamica f non dipende esplicitamente dal tempo,
df
= 0 ⇐⇒ { f , H}q,p = 0.
dt
2 Talvolta per semplicità di notazione quando ciò non comporta equivoci il pedice alle parentesi è
omesso. Inoltre la parentesi di Poisson è talvolta indicata in letteratura con il simbolo [·, ·] o [·, ·] PB .
58
4.5 parentesi di poisson
Più in generale, se abbiamo due variabili dinamiche f (q, p, t) e g(q, p, t), si definisce parentesi di Poisson di f e g rispetto alle coordinate canoniche (q, p) la quantità:
{ f , g} =
n
∑
j =1
∂ f ∂g
∂ f ∂g
−
.
∂q j ∂p j
∂p j ∂q j
(4.21)
Le parentesi di Poisson godono delle seguenti proprietà (siano f , g, f 1 , f 2 , g1 , g2
variabili dinamiche arbitrarie):
1. { f , g} = −{ g, f }, da cui ovviamente { f , f } = 0;
2. se c è costante rispetto alle coordinate canoniche, allora { f , c} = 0;
3. { f 1 + f 2 , g} = { f 1 , g} + { f 2 , g} e { f , g1 + g2 } = { f , g1 } + { f , g2 }, ovvero le
parentesi sono operatori lineari;
4. { f 1 · f 2 , g} = f 1 { f 2 , g} + f 2 { f 1 , g};
5. si dimostra la seguente identità, per nulla banale, detta di Jacobi:
{ f , { g, h}} + { g, {h, f }} + {h, { f , g}} = 0
Valgono inoltre le seguenti relazioni:
∂
∂f
∂g
•
{ f , g} =
, g + f,
;
∂t
∂t
∂t
• { f , qj } = −
∂f
∂f
e { f , pj } =
∂p j
∂q j
• {qi , q j } = 0, { pi , p j } = 0, {qi , p j } = δij (parentesi di Poisson fondamentali).
Notiamo per inciso che le equazioni di Hamilton possono essere scritte anche nel
modo seguente:
∂H
= { q k , H},
∂pk
∂H
ṗk = −
= { p k , H}.
∂qk
q̇k =
(4.22)
Osserviamo come l’asimmetria delle equazioni di Hamilton “scompaia” utilizzando le parentesi di Poisson.
Esercizi
1. Dimostrare l’identità di Jacobi nel caso in cui n = 1.
2. Dimostrare che se due variabili dinamiche f e g, che non dipendono esplicitamente dal tempo, sono entrambe integrali primi del moto, allora anche
{ f , g} è un integrale primo del moto (Suggerimento: utilizzare l’identità di
Jacobi e il fatto che d f /dt = 0 ⇐⇒ { f , H} = 0, dove H è l’hamiltoniana).
59
4.6 trasformazioni canoniche
3. Dimostrare che, se due variabili dinamiche f e g (in generale dipendenti
dal tempo) sono entrambe integrali primi del moto, allora anche { f , g} è un
integrale primo del moto (questo è il Teorema di Poisson).
4. Sia dato un punto materiale di massa m e sia l’hamiltoniana del nostro sistema H( x1 , x2 , x3 , p1 , p2 , p3 , t), in coordinate cartesiane. Dimostrare, utilizzando le parentesi di Poisson fondamentali, che { L j , pk } = e jkl pl , dove e jkl è il
simbolo di Levi-Civita, o delle permutazioni di 1,2,3. Ricordiamo che tale
simbolo vale 1 se ( j, k, l ) è una permutazione ciclica di (1, 2, 3), −1 se ( j, k, l )
è una permutazione ciclica di (2, 1, 3) ed è nullo altrimenti (cioè almeno due
indici sono uguali). Analogamente si può vedere che { L j , Lk } = e jkl Ll e
{ L j , L2 } = 0.
5. Supponiamo di avere un punto materiale in un potenziale a simmetria sferica. Si scriva in coordinate sferiche l’hamiltoniana e il momento angolare
della particella rispetto al centro della forza. Calcolare { L2 , H}, { L, H}.
4.6
trasformazioni canoniche
Le equazioni differenziali del moto, nel formalismo hamiltoniano, benché del primo ordine, non semplificano, in generale, i calcoli rispetto a quelle del formalismo
lagrangiano. La novità nell’approccio hamiltoniano risiede nel fatto che le coordinate e i momenti coniugati hanno la stessa rilevanza. Esistono casi in cui tutte
le n coordinate generalizzate sono cicliche; in tale circostanza tutti i momenti coniugati sono costanti del moto. Se poniamo per semplicità pi = αi (costante) per
i = 1, . . . , n, allora q̇i = ∂H(α1 , . . . , αn )/∂αi = ωi , valore costante, e quindi integrando si ha qi (t) = ωi t + qi (0). Abbiamo visto come sia possibile, in questo caso,
integrare banalmente le equazioni del moto.
Il fatto rilevante è che esistono problemi meccanici (quelli cosiddetti integrabili)
per i quali è possibile avere n coordinate generalizzate cicliche. Naturalmente punto fondamentale è saper passare da un sistema di coordinate canoniche (q, p) a
un altro sistema di coordinate canoniche ( Q, P ), anche per ricercare, ove esistano,
coordinate generalizzate cicliche.
Un modo, potremmo dire naturale, per ottenere nuove coordinate canoniche relative a un sistema meccanico lagrangiano (e quindi hamiltoniano) è di partire da
trasformazioni nello spazio delle configurazioni Q = Q(q, t), esprimere la lagrangiana in termini di Q e Q̇, ottenere i momenti coniugati corrispondenti tramite
la relazione Pi = ∂L/∂ Q̇i e infine riscrivere l’hamiltoniana in funzione di ( Q, P ),
nuove coordinate canoniche, ed eventualmente del tempo in modo esplicito. Si
può avere una trasformazione da un sistema di coordinate canoniche (q, p) a un
altro ( Q, P ) in maniera più generale, considerando (nello spazio delle fasi) come
indipendenti le coordinate generalizzate e i momenti coniugati (ricordiamo che
questo assunto è tipico della formulazione hamiltoniana). Si può, in altre paro-
60
4.6 trasformazioni canoniche
le, avere nello spazio delle fasi una trasformazione simultanea delle coordinate
generalizzate e dei momenti coniugati, cioè:
Q = Q(q, p, t)
(4.23)
P = P (q, p, t)
con (q, p) e ( Q, P ) vecchie e nuove, rispettivamente, coordinate canoniche. Trasformazioni di questo tipo, nello spazio delle fasi, sono dette canoniche e permettono, in termini delle nuove coordinate canoniche ( Q, P ), una nuova descrizione
equivalente della dinamica del nostro sistema meccanico, se, ovviamente, esiste
una nuova hamiltoniana funzione di ( Q, P, t), che dia luogo alle equazioni di
Hamilton. Possiamo in definitiva dare la seguente
Definizione (di trasformazione canonica) - Se (q, p) è un sistema di coordinate
canoniche con hamiltoniana H(q, p, t),
Q = Q(q, p, t)
P = P (q, p, t)
è una trasformazione canonica se esiste una nuova hamiltoniana K( Q, P, t) che
permette di scrivere le equazioni del moto nella forma
∂K
Q̇i =
∂Pi
,
∂K
Ṗi = −
∂Qi
con i = 1, . . . , n.
Sottolineiamo una proprietà rilevante delle trasformazioni canoniche (proprietà
che sarà evidente in seguito): le trasformazioni canoniche sono indipendenti dal
problema fisico specifico. In altre parole la trasformazione (q, p, t) → ( Q, P, t),
se è canonica per un particolare sistema meccanico, è canonica per tutti i sistemi
meccanici con lo stesso numero di gradi di libertà.
Abbiamo visto che le equazioni di Hamilton possono essere ottenute dal principio di Hamilton modificato, cioè
!
Z
δS = δ
t1
t0
n
∑ pi q̇i − H(q, p, t)
i =1
dt = 0.
Analogamente, se Q e P sono le nuove coordinate canoniche e K( Q, P, t) è la
nuova hamiltoniana, il principio di Hamilton modificato diventa:
!
Z
δS = δ
t1
t0
n
∑ Pi Q̇i − K(Q, P, t)
i =1
dt = 0.
Poiché le variazioni delle coordinate canoniche (relative a tutti i moti ammissibili
nello spazio delle fasi) devono essere nulle agli estremi, deve valere (si veda la
(4.20)) la seguente relazione (trasformazione canonica):
n
∑ pi q̇i − H(q, p, t) =
i =1
n
∑ Pi Q̇i − K(Q, P, t) +
i =1
61
dF
dt
(4.24)
4.6 trasformazioni canoniche
dove F (q, p, t), che supponiamo liscia, è detta funzione generatrice della trasformazione canonica (4.24). La relazione (4.24) può essere scritta:
n
n
i =1
i =1
∑ pi dqi − ∑ Pi dQi − (H − K) dt = dF.
(4.25)
La struttura della (4.25) induce a prendere in considerazione la sottoclasse di
trasformazioni in cui è possibile scegliere (q, Q) come variabili indipendenti in
∂p
luogo di (q, p). Richiediamo allora che p = p(q, Q, t) abbia3 det ∂Q 6= 0 e P =
P (q, Q, t). La funzione generatrice è detta, in questo caso, di tipo 1. Si ha:
F (q, p, t) = F (q, p(q, Q, t), t) = F1 (q, Q, t).
La relazione (4.25) può, allora, essere scritta in questo caso:
n
n
i =1
i =1
n
∑ pi dqi − ∑ Pi dQi − (H − K) dt =
=
n
∂F1
∂F1
∂F1
dqi + ∑
dQi +
dt
∂q
∂Q
∂t
i
i
i =1
i =1
∑
Di conseguenza, per i = 1, . . . , n:
∂F1
∂qi
∂F1
Pi = −
∂Qi
∂F1
.
K = H+
∂t
pi =
(4.26)
(4.27)
(4.28)
Una volta nota la funzione generatrice di tipo 1, tramite la (4.26) si ottiene
p = p(q, Q, t)
(4.29)
e tramite la (4.28)
P = P (q, Q, t).
Invertendo poi la (4.29), si ottiene Q = Q(q, p, t); si può pertanto esprimere anche
P in funzione di (q, p, t). Osserviamo che l’inversione è garantita dalla proprietà
di non degenerazione
∂p
∂2 F1
= det
6= 0.
∂Q
∂q ∂Q
Possiamo riassumere il discorso appena fatto nel modo seguente:
3 Ovvero la matrice jacobiana ∂ p/∂Q = ∂ pk /∂Q j è assunta non singolare.
62
4.6 trasformazioni canoniche
Per ogni funzione F1 (q, Q, t) liscia, soggetta alle proprietà di non
degenerazione, la trasformazione (q, p, t) → ( Q, P, t), definita, per i =
1, . . . , n, da
∂Fi
pi =
∂qi
∂F
Pi = − i
∂Qi
e dalla formula inversa Q = Q(q, p, t), è canonica; a ogni hamiltoniana
H(q, p, t) corrisponde l’hamiltoniana K = H + ∂F1 /∂t. In particolare,
se ∂F1 /∂t = 0, K = H.
Vediamo alcuni esempi di trasformazioni di tipo 1 per sistemi a un grado di
libertà:
• Sia F1 = qQ la funzione generatrice di tipo 1 (n = 1). Allora p = Q e P = −q.
Vale a dire, (q, p) → ( p, −q) è una trasformazione canonica. Inoltre K = H.
Notare che la trasformazione canonica è indipendente dal sistema fisico in
esame.
p
• F1 = q2 Q2 /2. Allora: p = ∂F1 /∂q = qQ2 =⇒ Q =
p/q e P =
√
2
−∂F1 /∂Q p= −q Q =⇒ p = −q pq. La trasformazione canonica è
√
(q, p) → ( q/p, −q qp) con K = H.
• F1 = etq Q. Abbiamo: p = ∂F1 /∂q = tetq Q =⇒ Q = e−tq p/t e P =
−∂F1 /∂Q = −etq =⇒ P = −etq . La trasformazione canonica è (q, p) →
(e−tq p/t, −etq ) con K = H + qetq Q.
Può capitare che non sia possibile avere una funzione generatrice di tipo 1.
Questo accade se p può essere funzione di (q, P, t) e non di (q, Q, t). Allora si
può porre:
n
F = F2 (q, P, t) − ∑ Qi Pi .
i =1
La relazione (4.25) diventa in questo caso
n
n
i =1
i =1
n
n
i =1
i =1
i dQi − (H − K) dt = dF2 − ∑ Qi dPi − ∑ P
i dQi
∑ pi dqi − ∑P
ovvero
n
n
i =1
i =1
∑ pi dqi + ∑ Qi dPi − (H − K) dt = dF2 .
(4.30)
F2 è detta funzione generatrice di tipo 2. Dalla (4.30) otteniamo
∂F2
,
∂qi
∂F2
Qi =
,
∂Pi
pi =
K = H+
(4.31)
(4.32)
∂F2
∂t
(i = 1, . . . , n).
63
4.6 trasformazioni canoniche
Notiamo che bisogna imporre la condizione di non degenerazione ∂ p/∂P =
∂2 F2
det ∂q
∂P 6 = 0. Invertendo la (4.31) otteniamo P = P ( q, p, t ) e, quindi, nella (4.32)
Q in funzione (q, p, t).
Facciamo ora alcuni esempi per sistemi a un grado di libertà:
• F2 = qP; allora p = ∂F2 /∂q = P e Q = ∂F2 /∂P = q. Otteniamo cioè la
trasformazione canonica identica, con K = H.
• F2 = (q + αP)2 /2, con α > 0. Allora p = ∂F2 /∂q = q + αP =⇒ P =
( p − q)/α, mentre Q = ∂F2 /∂P = α(q + αP) = α(q + p − q) = αp. La
trasformazione canonica è dunque (q, p) → (αp, ( p − q)/α), con K = H.
Può accadere che siano scelte come variabili indipendenti p e Q. In tal caso
∂q
q = q( p, Q, t), con la condizione det ∂Q 6= 0. Allora
n
F = F3 ( p, Q, t) + ∑ qi pi .
(4.33)
i =1
La funzione generatrice si dice in tal caso di tipo 3. La relazione (4.25) diventa per
la (4.33)
n
n
n
n
i =1
i =1
i =1
dq
i dqi − ∑ Pi dQi − (H − K) dt = dF3 + ∑ qi dpi + ∑ p
∑p
i i
i =1
n
n
=⇒
− ∑ qi dpi − ∑ Pi dQi − (H − K) dt = dF3
i =1
i =1
da cui
∂F3
,
∂pi
∂F3
Pi = −
,
∂Qi
∂F3
K = H+
∂t
qi = −
(4.34)
(4.35)
(i = 1, . . . , n).
∂q
La condizione det ∂Q 6= 0 può pertanto essere scritta, in base alla (4.34) co2
∂ F3
me det ∂p
∂Q (condizione di non degenerazione). Proponiamo alcuni esempi di
funzioni generatrici siffatte sempre nel caso di sistemi a un grado di libertà:
• F3 = − pQ. Allora q = −∂F3 /∂p = Q e P = −∂F2 /∂Q = p. In questo caso
la trasformazione canonica è la trasformazione identica, cioè (q, p) → (q, p),
con K = H.
• F3 = −e p+Q . Allora q = −∂F3 /∂p = e p+Q > 0 =⇒ Q = ln q − p e
P = −∂F2 /∂Q = e p+Q = qe p e− p = q. La trasformazione canonica è, allora,
la seguente: (q, p) → (ln q − p, q), con q > 0 e K = H.
64
4.6 trasformazioni canoniche
Se sono scelte come variabili indipendenti p e P, abbiamo q = q( p, P, t) con la
condizione
det
∂q
6= 0
∂P
(4.36)
e
n
n
i =1
i =1
F = F4 ( p, P, t) + ∑ qi pi − ∑ Qi Pi .
(4.37)
La funzione generatrice è detta di tipo 4. La relazione (4.25) diventa per la (4.37):
n
n
i dqi − ∑ P
i dQi − (H − K) dt =
∑ p
i =1
n
i =
1
n
n
n
= dF4 + ∑ qi dpi + ∑ p
i dqi − ∑ Qi dPi − ∑ P
i dQi =⇒
n
i =1
n
i =1
i =1
i =
1
− ∑ qi dpi + ∑ Qi dPi − (H − K) dt = dF4
i =1
i =1
da cui
∂F4
,
∂pi
∂F4
Qi =
,
∂Pi
∂F4
K = H+
∂t
qi = −
(4.38)
(4.39)
(i = 1, . . . , n).
2
∂q
∂ F4
La condizione det ∂P 6= 0 può essere scritta in base alla (4.38) come det ∂P
∂p 6 = 0.
Per esempio, se, per n = 1, F4 = pP, allora q = −∂F4 /∂p = − P ⇐⇒ P = −q
e Q = ∂F4 /∂P = p. La trasformazione canonica è, pertanto, la seguente: (q, p) →
( p, −q), con K = H.
Osserviamo, infine, che una funzione generatrice non deve essere necessariamente una dei quattro tipi per tutti i gradi di libertà. Si può usare una funzione
generatrice che mescoli i quattro tipi. Così per n = 2
F = F23 (q1 , p2 ; P1 , Q2 ; t) − Q1 P1 + q2 p2
rappresenta una funzione generatrice di tipo 2 per il primo grado di libertà e di
tipo 3 per il secondo.
Accenniamo infine (senza dimostrazioni) a una bella proprietà riguardante le
parentesi di Poisson e le trasformazioni canoniche.4 Sia data una trasformazione
canonica:
Q = Q(q, p, t)
.
(4.40)
P = P (q, p, t)
4 Per una dimostrazione di questa proprietà si veda Landau e Lifšits [5, pagina 211].
65
4.6 trasformazioni canoniche
Se f ( Q, P, t) e g( Q, P, t) sono due variabili dinamiche, si può dimostrare che:
{ f ( Q, P, t), g( Q, P, t)}Q,P =
= { f ( Q(q, p, t), P(q, p, t), t), g( Q(q, p, t), P(q, p, t), t)}q,p ,
ovvero le parentesi di Poisson sono invarianti per trasformazioni canoniche. In particolare abbiamo
{ Q j , Qk }Q,P = { Q j , Qk }q,p = 0
(4.41a)
{ Pj , Pk }Q,P = { Pj , Pk }q,p = 0
(4.41b)
{ Q j , Pk }Q,P = { Q j , Pk }q,p = δjk .
(4.41c)
Inoltre si può far vedere che, se (q, p) sono coordinate canoniche, le trasformazioni (4.40) sono canoniche solo se sono soddisfatte (4.41). In definitiva, assegnate
le trasformazioni, il test basato sulle parentesi di Poisson è conclusivo per stabilire se esse sono canoniche senza passare per le funzioni generatrici o precisare
specifici problemi fisici.
Esempi
1. Si consideri un oscillatore armonico monodimensionale. Usando la funzione
generatrice di tipo 1
F1 (q, Q) =
1
mωq2 cot Q
2
con m, ω costanti positive, determinare la trasformazione canonica e integrare le equazioni del moto.
Soluzione. Dalla funzione generatrice abbiamo:
∂F1
= mω cot Q
∂q
∂F1
1
1
P=−
= mωq2 2 .
∂Q
2
sin Q
p=
Ricaviamo q e p in funzione di Q e P:
r
2P
q=
sin Q
mω
√
p = 2Pmω cos Q.
Se k = mω 2 è la costante elastica, l’hamiltoniana rispetto alle usuali coordinate è:
H=
1 p2 1
+ mω 2 q2 ,
2m
2
66
4.6 trasformazioni canoniche
quindi nelle nuove coordinate:
K( Q, P) = H(q( Q, P), p( Q, P)) =
= ωP.
1 2Pmω
1
2P
cos2 Q + mω 2
sin2 Q =
2 m
2
mω
Dunque Q è una coordinate ciclica e il suo momento coniugato P è costante, inoltre l’energia coincide con l’hamiltoniana e quindi si conserva.
Dall’equazione di Hamilton risulta:
Q̇ =
∂K
=ω
∂P
e l’equazione del moto si riduce a
Q = ωt + Q0 ,
dove Q0 è una costante di integrazione da determinare dalle condizioni
iniziali.
2. Data la trasformazione del secondo tipo a un grado di libertà
3/2
2√
P
F2 (q, P) =
2am
+q
,
3
ma
con m, a costanti positive, determinare le trasformazioni canoniche Q =
Q(q, p), P = P(q, p). Scrivere l’hamiltoniana H(q, p) di una particella di
massa m in moto unidimensionale con accelerazione costante a. Effettuare inoltre la trasformazione canonica su questa hamiltoniana: K( Q, P) =
H(q( Q, P), p( Q, P)) e integrare le equazioni del moto.
Soluzione. Dalla trasformazione abbiamo:
1/2
√ P
∂F2
p=
= m 2a
+q
∂q
ma
√ 1/2
∂F2
2a
P
Q=
=
+q
.
∂P
a
ma
Dividendo membro a membro:
Q
1
p
=
=⇒ Q =
p
ma
ma
e, dalla prima equazione:
P=
p2
− maq.
2m
Nel problema fisico proposto, l’hamiltoniana coincide con l’energia totale
del sistema quindi:
H=
1 p2
− maq = P.
2m
67
4.6 trasformazioni canoniche
La funzione generatrice della trasformazione non dipende esplicitamente
dal tempo, pertanto K = H = P. Le equazioni di Hamilton sono allora:
∂K
=1
∂P
∂K
Ṗ =
= 0,
∂Q
Q̇ =
cioè P è costante, quindi anche l’energia del sistema si conserva. Si poteva
giungere a questo risultato anche osservando che la coordinata Q è ciclica.
Integrando la prima delle equazioni di Hamilton abbiamo
Q ( t ) = t + Q0 =
p(t)
,
ma
dove Q0 è una costante di integrazione. Scegliendo l’origine dei tempi in
modo che risulti Q0 = 0 abbiamo
p(t) = mat.
3. Siano (q, p) le coordinate canoniche. La trasformazione
Q=p
P=q
è canonica?
Soluzione. Risulta
{ Q, P}q,p = { p, q}q.p = −1
quindi la trasformazione non è canonica.
4. Siano (q, p) le coordinate canoniche. Determinare se la trasformazione
(
Q = 2q + p2
p
P=
2
è canonica.
Soluzione. Risulta:
{ Q, P}q,p = {2q + p2 , p/2}q,p = {2q, p/2} + { p2 , p/2} = {2q, p/2} =
2
= {q, p} = 1
2
dunque la trasformazione è canonica. Troviamo la funzione generatrice di
tipo 2:
∂F2
p =
= 2P
∂q
Q = ∂F2 = 2q + 4P2
∂P
68
4.6 trasformazioni canoniche
Integrando la prima equazione del sistema abbiamo:
F2 = 2qP + g( P)
dove g( P) è una costante di integrazione dipendente da P. Sostituendo nella
seconda equazione ricaviamo:
∂F2
4
= 2q + g0 ( P) = 2q + 4P2 =⇒ g0 ( P) = 4P2 =⇒ g( P) = P3 + c,
∂P
3
in cui c è una costante di intrgrazione. Facendo in modo che risulti c = 0, la
funzione generatrice diventa:
4
F2 = 2qP + P3 .
3
5. Data la trasformazione
Q = α log p
P = −q β p
determinare per quali valori delle costanti α e β è canonica. Scrivere inoltre
la funzione generatrice di tipo 1 associata.
Soluzione. Affinché la trasformazione sia canonica deve risultare
1 = { Q, P}q,p = {α log p, −q β p}q,p =
=
∂α log p ∂(−q β p) ∂α log p ∂(−q β p)
−
= αβq β−1 .
∂q
∂p
∂p
∂q
Poiché α e β sono costanti abbiamo β − 1 = 0 =⇒ β = 1 e quindi α = 1. La
trasformazione è allora:
Q = log p
P = −qp
Troviamo la funzione generatrice di tipo 1:
∂F1
= eQ
p =
∂q
∂F1
P = −
= −qp
∂Q
Integrando la prima equazione si ottiene:
F2 = qeQ + g( Q)
con g( Q) costante di integrazione dipendente da Q. Sostituendo nella seconda abbiamo:
∂F1
= qeQ + g0 ( Q)0qeQ =⇒ g( Q) = c
∂Q
dove c è una costante di integrazione. Posto c = 0 la funzione generatrice è:
F1 = qeQ .
69
4.7 equazioni di hamilton-jacobi
4.7
equazioni di hamilton-jacobi
Abbiamo visto che nell’approccio hamiltoniano il moto di un sistema meccanico
nello spazio delle fasi con n gradi di libertà è determinato dalla soluzione di 2n
equazioni differenziali ordinarie del primo ordine rispetto al tempo, che coinvolgono 2n variabili dipendenti dal tempo (le coordinate canoniche) e una variabile
indipendente (il tempo appunto).
Vogliamo ora far vedere che lo stesso problema fisico può essere risolto in
un modo completamente diverso: attraverso la determinazione di una funzione5 S(q1 , . . . , qn ; t) soluzione di un’equazione differenziale alle derivate parziali,
contenente n + 1 derivate parziali del primo ordine rispetto a q1 , . . . , qn e a t.
Supposta nota l’hamiltoniana del sistema in esame H(q, p, t), con q = (q1 , . . . , qn )
e p = ( p1 , . . . , pn ) coordinate canoniche, assumiamo che esista una trasformazione
canonica Q = Q(q, p, t) e P = P (q, p, t) che dia luogo a una nuova hamiltoniana
K nulla. In questo caso, per i = 1, . . . , n:
∂K
=0
∂Pi
∂K
Ṗi = −
=0
∂Qi
Q̇i =
cioè Q e P sono costanti nel tempo. Se F è la funzione generatrice, abbiamo la
condizione
H(q, p, t) +
∂F
= 0.
∂t
(4.42)
Se facciamo l’ipotesi che la funzione generatrice sia del secondo tipo, abbiamo
che:
pi =
∂F2 (q, P, t)
∂qi
(i = 1, . . . , n).
L’equazione (4.42) può essere pertanto riscritta:
∂F2
∂F2
H q,
,t +
= 0.
∂q
∂t
(4.43)
La (4.43) è nota come equazione di Hamilton-Jacobi ed è, per la funzione generatrice, un’equazione differenziale alle derivate parziali prime nelle n + 1 variabili
(q1 , . . . , qn , t). F2 è, in letteratura, indicata usualmente col simbolo S. La funzione
S è detta funzione principale di Hamilton. Supponiamo che esista una soluzione
completa del tipo S = S(q1 , . . . , qn ; α1 , . . . , αn+1 ; t) dove α1 , . . . , αn+1 sono costanti
di integrazione indipendenti. L’equazione di Hamilton-Jacobi non dà informazioni sui nuovi momenti Pi da cui dovrebbe dipendere S. Sappiamo che questi nuovi
momenti sono tutti costanti. Osserviamo che nella (4.43) la funzione S non compare direttamente ma solo mediante le derivate parziali rispetto a qi e a t. Allora,
5 In realtà, come vedremo, S dipende in generale anche da n + 1 costanti arbitrarie
70
4.7 equazioni di hamilton-jacobi
se S è soluzione dell’equazione di Hamilton-Jacobi, anche S+costante è soluzione.
Questa proprietà implica che una delle n + 1 costanti di integrazione deve comparire come costante additiva. Si può, allora, scegliere una soluzione completa che
dipende da n costanti indipendenti, cioè:
S = S ( q1 , . . . , q n ; α1 , . . . , α n ; t ).
(4.44)
Possiamo benissimo scegliere queste costanti esattamente uguali ai nuovi momenti: Pi = αi . Questa scelta non contraddice l’ipotesi iniziale che la funzione generatrice della trasformazione canonica sia di tipo 2 e quindi che p = p(q, P, t). Si
possono scegliere i nuovi momenti, essendo costanti, assegnando al tempo t = 0
q e p. In particolare, sappiamo che
pi =
∂S
(q; α; t)
∂qi
(4.45)
con α = (α1 , . . . , αn ); invertendo la (4.45) possiamo ottenere α al tempo t = 0 in
funzione di q e p. Le nuove coordinate generalizzate sono date da:
Qi =
∂S
= βi
∂αi
(costanti).
(4.46)
Le costanti β i possono essere calcolate conoscendo i valori al tempo t = 0 delle coordinate canoniche. Possiamo poi, invertendo le trasformazione canoniche,
esprimere le vecchie coordinate canoniche (q, p) in funzione delle nuove ( β, α):6
q = q( β, α, t)
(4.47)
p = p( β, α, t)
Queste relazioni ci dicono che possiamo ottenere, mediante una trasformazione
canonica, le coordinate canoniche (q, p) in funzione del tempo, cioè di determinare il moto del sistema nello spazio delle fasi una volta che siano assegnate le
condizioni iniziali. Le relazioni (4.47) ci danno, in altre parole, la soluzione delle
equazioni di Hamilton, noti q(0) e p(0).
Da un punto di vista matematico abbiamo ottenuto un’equivalenza tra un’equazione differenziale alle derivate parziali in n + 1 variabili del primo ordine e
2n equazioni differenziali ordinarie del primo ordine. Questa equivalenza può
essere, nel nostro caso, imputata al fatto che sia l’equazione di Hamilton-Jacobi
sia le equazioni di Hamilton derivano dal medesimo principio di Hamilton modificato. Possiamo ora cercare di comprendere il significato fisico della funzione
generatrice del secondo tipo S. Osserviamo che, essendo α quantità costanti,
dS(q, α, t)
=
dt
∂S
∑ ∂qi q̇i +
i
∂S
.
∂t
(4.48)
Se teniamo presenti le (4.45), la (4.48) diventa:
dS(q, α, t)
=
dt
∑ pi q̇i +
i
∂S
=
∂t
∑ pi q̇i − H
i
6 β = ( β 1 , . . . , β n ), α = ( α1 , . . . , α n ).
71
(4.49)
4.8 variabili angolo-azione nel caso unidimensionale
dove abbiamo tenuto conto della (4.42). Balza evidente dalla (4.49) e da quanto
detto sul principio di Hamilton modificato che S rappresenti (a meno di costanti
additive) l’azione.
Vediamo un caso particolare.7 Supponiamo che H non dipenda esplicitamente
dal tempo. Allora la funzione principale di Hamilton deve avere la seguente
struttura:
S(q, α, t) = W (q, α) − at
(4.50)
dove W (q, α) è detta funzione caratteristica di Hamilton. Osserviamo che
pi =
∂S
∂W
=
.
∂qi
∂qi
Allora
∂W
dW
=
q̇i = pi q̇i
dt
∂qi
e quindi
W=
4.8
Z
pi dqi .
variabili angolo-azione nel caso unidimensionale
Sia H(q, p) l’hamiltoniana nel nostro sistema a un solo grado di libertà, con (q, p)
coordinate canoniche.
Supponiamo che il sistema abbia un moto periodico e che esista una trasformazione canonica (indipendente dal tempo) (q, p) → (ψ, J ), indotta da una funzione
generatrice di tipo 1 F1 (q, ψ) indipendente dal tempo, in modo tale che ψ sia
ciclica.8 Ovviamente il nuovo momento coniugato J è una costante del moto e
H = H( J ). Abbiamo, per la prima equazione di Hamilton, ψ̇ = ∂ H ( J )/∂J = ω
(costante), da cui ψ(t) = ωt + ψ0 .
Poiché, per ipotesi, il moto è periodico, le coordiante canoniche q e p saranno
funzioni periodiche. Avremo come conseguenza che il moto deve essere periodico
in ψ. Assumiamo che il periodo sia 2π. La nuova coordinata generalizzata ψ è
detta variabile angolo, mentre J è detta variabile azione e assume il ruolo di momento
angolare. Per quanto detto, F1 (q, ψ) deve essere periodica rispetto a ψ di periodo
2π:
∂F1
∂F1
dF1 =
dq +
dψ = p dq − J dψ.
∂q
∂ψ
Dopo un periodo, F1 torna al valore iniziale e ψ consegue una variazione di 2π.
0=
I
dF1 =
I
p dq − J
Z 2π
0
dψ =
I
p dq − 2π J =⇒ J =
1
2π
I
p dq.
Questa relazione può essere presa proprio come definizione della variabile azione.
7 Vi invito a leggere e a studiare anche gli esempi riportati in Goldstein, Poole e Safko [4, pagine 413418].
8 Ricordiamo che l’hamiltoniana non cambia, cioè K = H.
72
4.8 variabili angolo-azione nel caso unidimensionale
4.8.1 Esempio: l’oscillatore armonico unidimensionale
L’oscillatore armonico unidimensionale ha hamiltoniana
1 2 1 2
p + kq ,
2m
2
H=
dove m è la massa della particella e k > 0 è una costante. Possiamo porre ω 2 =
k/m e riscrivere l’hamiltoniana:
1 2 1 2 2
p + ω mq = E.
2m
2
H=
E, l’energia totale, è costante e il suo valore è fissato dalle condizioni iniziali.
Pertanto:
q
p = 2mE − m2 ω 2 q2
F1 (q, ψ) =
Z
Z
Z
dF1 = p dq − J dψ =
Z q
Z
2
2
2
=
2mE − m ω q dq − J dψ.
Per calcolare I =
√
Rp
2mE − m2 ω 2 q2 dq, poniamo sin θ =
p
m/(2E)ωq. Allora
Z r
Z
mω 2 q2
2E
E
sin 2θ
2
I = 2mE
1−
dq =
cos θ dθ =
θ+
,
2E
ω
ω
2
p
dove ovviamente θ = arcsin( m/(2E)ωq). Osserviamo che in questi casi abbiamo
J=
1
2π
I
p dq =
1
2π
I
p dq =
E
,
ω
cioè
E = Jω.
In base poi al calcolo di I possiamo scrivere esplicitamente F1 (q, ψ) in funzione di
θ e ψ, cioè:
E
sin 2θ
F1 =
θ+
− Jψ.
ω
2
Poiché F1 deve essere una funzione periodica, Eθ/ω − Jψ = J (θ − ψ) = 0 cioè
θ = ψ. In base a quest’ultimo risultato,
E
sin ψ cos ψ.
ω
p
Poiché sin θ = sin ψ = m/(2E)ωq,
F1 =
E=
mω 2 q2
sin ψ
73
4.8 variabili angolo-azione nel caso unidimensionale
e, in definitiva,
F1 (q, ψ) =
1
mωq2 cot ψ.
2
Allora
p=
∂F1
= mωq cot ψ
∂q
J=−
∂F1
1 ωq2
= m 2
∂ψ
2 sin ψ
1
= mωq2 (1 + cot2 ψ)
2
1
1 p2
E
= mωq2 +
= .
2
2 mω
ω
In conclusione
ψ = arccot
p
mωq
2
1
J = mωq2 + 1 p
2
2 mω
.
74
RIFERIMENTI BIBLIOGRAFICI DELLA PARTE I
[1]
Mauro Anselmino, Sergio Costa e Enrico Predazzi. Origine classica della fisica
moderna. Contiene una trattazione su tutti gli argomenti del corso. Torino:
Levrotto & Bella, 1999.
[2]
Vladimir Igorevič Arnol’d. Metodi matematici della meccanica classica. Roma:
Editori Riuniti, 2004.
[3]
Antonio Fasano e Stefano Marmi. Meccanica analitica. Torino: Bollati
Boringhieri, 2002.
[4]
Herbert Goldstein, Charles Poole e John Safko. Meccanica Classica. Bologna:
Zanichelli, 2005. (Citato alle pagine 55, 72).
[5]
Lev Davidovič Landau e Evgenij Mikhailovič Lifšits. Meccanica. Volume 1. Fisica teorica. Roma: Editori Riuniti university press, 2009. (Citato a
pagina 65).
75
Parte II
RELATIVITÀ RISTRETTA E INTRODUZIONE ALLA
MECCANICA QUANTISTICA
5
RELATIVITÀ SPECIALE
Avvertenza! In questo capitolo indicheremo i tensori in grassetto, v, mentre i vettori saranno
indicati secondo la notazione ~v.
5.1
trasformazioni di lorentz
5.1.1 Premessa
Le equazioni di Maxwell, che hanno permesso di unificare sia i campi elettrici e magnetici sia l’ottica geometrica, non sono invarianti per trasformazioni di
Galileo. Premettiamo due semplici considerazioni.
• Nelle equazioni compare esplicitamente la velocità di propagazione dei se√
gnali elettromagnetici: c = 1/ e0 µ0 . Secondo il principio di relatività di
Galileo passando da un sistema di riferimento inerziale a un altro le velocità
si sommano come vettori, dunque la velocità di un segnale luminoso dipende dal sistema di riferimento inerziale e sarà diversa al cambiare del sistema.
La spiegazione che si dette sulla comparsa del modulo della velocità di un
segnale elettromagnetico nelle equazioni si basò sull’esistenza di un mezzo
(estremamente rigido e rarefatto) le cui deformazioni dovrebbero corrispondere ai campi elettromagnetici. Il mezzo come sappiamo fu chiamato etere
e si pose il problema di individuare il sistema di riferimento a esso solidale.
Le equazioni di Maxwell, così come formulate, dovevano essere valide in
tale sistema di riferimento.
• La presenza di asimmetrie in alcuni fenomeni elettromagnetici, quando si
passa da un sistema di riferimento inerziale a un altro, non trova una spiegazione nell’ambito della teoria della relatività di Galileo. Per esempio, una
carica puntiforme q ferma in un sistema di riferimento inerziale genera un
campo elettrostatico, ma la stessa carica per un altro sistema di riferimento
inerziale è in moto e genera anche un campo magnetico.
Inoltre l’esperimento di Michelson e Morley dimostrò, senza ombra di dubbio,
che l’etere non esiste e che la velocità della luce (nel vuoto) non dipende dalla
velocità della sorgente.
5.1.2 Concetto di evento
L’idea che è alla base della teoria della relatività è di decomporre tutto ciò che
accade in eventi. Un evento rappresenta la minima determinazione possibile, individuata dall’assegnazione di tre coordinate spaziali euna temporale. In altre
77
5.1 trasformazioni di lorentz
parole, un evento è un qualcosa che accade in un dato punto dello spazio in un
particolare istante di tempo. Se abbiamo un sistema di assi cartesiani Oxyz, un
evento è una quaterna di numeri ( x, y, z, t). Tutto ciò che accade deve ammettere
una descrizione in termini di relazioni o coincidenze tra eventi. L’insieme degli
eventi costituisce lo spaziotempo.
5.1.3 Principio di inerzia
Postuliamo l’esistenza di una particolare classe di sistemi di riferimento, rispetto
a ognuno dei quali tutti i punti materiali isolati o sono fermi o si muovono con
velocità vettoriale costante. Questi sistemi di riferimento sono detti, come ben
sappiamo, inerziali.
Dobbiamo altresì assumere (per misurare lunghezze e intervalli di tempo) che
si abbia una classe di regoli rigidi ideali e una classe di orologi ideali. Due regoli
ideali hanno la proprietà di essere della medesima lunghezza se sono in quiete,
indipendentemente dalla loro storia passata. Analogamente, due orologi ideali
battono il tempo nello stesso modo se sono in quiete, a prescindere dalla loro
storia passata. Noi supporremo che in ogni luogo di un sistema di riferimento vi
sia un orologio in quiete. Il grosso problema è quello di sincronizzare tutti questi
orologi ideali. Un modo per sincronizzare due orologi, uno posto in A e l’altro
posto in B 6≡ A, solidali con il nostro sistema di riferimento inerziale, può essere
il seguente: lanciamo da A verso B un segnale elettromagnetico (supposta nota la
velocità della luce1 ), sincronizziamo l’orologio in B con quello in A tenendo conto
della distanza tra A e B e del tempo impiegato dal segnale a raggiungere B.
Noi affrontiamo lo studio della cosiddetta Relatività Ristretta o Speciale, che si
occupa del rapporto esistente fra la descrizione dei fenomeni fisici compiute da
osservatori solidali con sistemi di riferimento inerziali. La Relatività Generale avrà
lo scopo di estendere lo studio a osservatori non inerziali.
5.1.4 Postulati della Relatività Ristretta e trasformazioni di Lorentz
Oltre al principio d’inerzia, alla base della relatività ristretta vi sono due postulati:
Primo postulato: principio di relatività - Le leggi della Fisica sono le stesse in
tutti i riferimenti inerziali.
Secondo postulato: costanza della velocità della luce - La velocità della luce
nel vuoto assume lo stesso valore, indipendentemente dalla direzione, in tutti i sistemi di
riferimento inerziali.
Vediamo, ora, come ottenere le trasformazioni di Lorentz utilizzando i postulati
della relatività ristretta, supponendo che il tempo sia omogeneo e che lo spazio sia
omogeneo e isotropo. Supponiamo di avere due sistemi di riferimento inerziali
1 Per misurare la velocità del segnale può essere usato un solo orologio, sempre che il percorso
seguito dal segnale sia chiuso.
78
5.1 trasformazioni di lorentz
y0
y
S0
S
~v
O0
O
z
x ≡ x0
z0
Figura 5.1: Rappresentazione dei sistemi di riferimento in esame.
S(Oxyz) e S0 (O0 x 0 y0 z0 ), il quale si muove rispetto al primo con velocità costante v
diretta lungo la direzione positiva delle x in modo che x ≡ x 0 (si veda Figura 5.1).
Un evento è caratterizzato in S dalle coordinate spaziotemporali ( x, y, z, t). Lo
stesso evento avrà in S0 coordinate spaziotemporali ( x 0 , y0 , z0 , t0 ). Cerchiamo le
relazioni
0
x = x 0 ( x, y, z, t)
0
y = y0 ( x, y, z, t)
(5.1)
z0 = z0 ( x, y, z, t)
0
t = t0 ( x, y, z, t)
sulla base dei due postulati. Supponiamo che si sia proceduto a sincronizzare gli
orologi in ognuno dei due sistemi di riferimento inerziali e che quando O0 ≡ O,
t = t0 = 0 (è il modo più semplice di sincronizzare due orologi,2 uno solidale con
S, l’altro solidale con S0 ). Osserviamo che poiché lo spazio è isotropo abbiamo potuto scegliere, assolutamente in generalità, i due sistemi inerziali come precisato
sopra. Una prima osservazione: l’ipotesi di omogeneità dello spazio e del tempo
richiede che le (5.1) siano lineari. Altre osservazioni:
1. Poiché continuamente l’asse x coincide con l’asse x 0 , o in modo equivalente
0
y=0
y =0
⇐⇒
,
z=0
z0 = 0
y0 e z0 sono espressi mediante una combinazione lineare di y e z.
2. Il piano x − y (caratterizzato dall’equazione z = 0) si deve trasformare nel
piano x 0 − y0 (cioè z0 = 0); analogamente il piano x − z (caratterizzato dall’equazione y = 0) si deve trasformare nel piano x 0 − z0 (cioè y0 = 0). Allora y0
dev’essere proporzionale solo a y e z0 deve essere proporzionale solo a z.
3. Si può far vedere che un’asta posta lungo l’asse y solidale con S deve avere
la stessa lunghezza in S0 ; ciò comporta che y0 = y. Analogamente si prova
che z0 = z.
2 Non è assolutamente detto che due orologi, uno solidale con S e l’altro con S0 , battano il tempo allo
stesso modo.
79
5.1 trasformazioni di lorentz
4. Per ragioni di simmetria t0 non può dipendere linearmente né da y né da z.
Altrimenti, per esempio, due orologi, fermi in S, uno posto sull’asse delle y
in y = +1 e l’altro posto sullo stesso asse in y = −1, sarebbero in disaccordo
osservati da S0 . Questo fatto sarebbe in contrasto con l’ipotesi di isotropia
dello spazio.
5. Poiché il punto O0 e ogni altro punto del piano y0 − z0 ha rispetto a S equazione oraria x = vt, allora x 0 , nella trasformazione cercata, deve essere
proporzionale a x − t.
Le considerazioni precedenti portano a dire che le trasformazioni (5.1) devono
essere, in particolare, del tipo:
x 0 = γ(v)( x − vt),
(5.2a)
0
(5.2b)
0
(5.2c)
0
(5.2d)
y = y,
z = z,
t = a(v) x + b(v)t.
Il nostro scopo è ora quello di determinare le costanti γ, a e b utilizzando il secondo postulato della relatività. Supponiamo che, quando O ≡ O0 , cioè al tempo
t = t0 = 0, un’onda elettromagnetica sferica venga emessa da O ≡ O0 . In base
al secondo postulato della relatività l’onda elettromagnetica si propaga in tutte le
direzioni con velocità c (velocità della luce nel vuoto) sia in S sia in S0 . Consideriamo allora un punto del fronte d’onda ( x, y, z) al tempo t in S. Le coordinate
spaziotemporali ( x, y, z, t), che definiscono l’evento in S, dovranno soddisfare la
seguente relazione:
x 2 + y2 + z2 = c2 t2 .
(5.3)
Lo stesso evento in S0 avrà coordinate spaziotemporali ( x 0 , y0 , z0 , t0 ), che, per quanto detto, dovranno essere legate dalla relazione:
x 02 + y 02 + z 02 = c 2 t 02 .
(5.4)
Ponendo le (5.2) nella (5.4), otteniamo:
γ2 ( x − vt)2 + y2 + z2 = c2 ( ax + bt)2
(γ2 − c2 a2 ) x2 + y2 + z2 − 2xt(γ2 v + c2 ab) = (c2 b2 − γ2 v2 )t2 .
(5.5)
La relazione (5.5) deve coincidere con la (5.3) per ogni x, y, z, t. Si ha, allora,
2
2 2
γ − c a = 1
2
(5.6)
γ v + c2 ab = 0 .
2 2
2
2
2
c b −γ v = c
Tenendo presente che se v = 0, b = 1 dalle (5.6) otteniamo:
1
γ= √
1 − v2 /c2
v
.
a = − 2γ
c
b = γ
80
(5.7)
5.1 trasformazioni di lorentz
In conclusione le trasformazioni di Lorentz sono le seguenti:
x 0 = γ( x − vt),
(5.8a)
0
y = y,
(5.8b)
0
z = z,
(5.8c)
v t0 = γ t − 2 x ,
c
(5.8d)
con
γ= √
1
1 − v2 /c2
.
(5.9)
Dalle (5.8) è facile ricavare le trasformazioni inverse
x = γ( x 0 + vt0 ),
(5.10a)
0
y=y,
(5.10b)
z = z0 ,
v t = γ t0 + 2 x 0 .
c
(5.10c)
(5.10d)
Notiamo che se v c, allora γ ≈ 1 e inoltre dalle (5.10) si riottengono le trasformazioni di Galileo. Siano ( x, y, z, t) le coordinate spaziotemporali in S di un
evento e siano ( x 0 , y0 , z0 , t0 ) le coordinate spaziotemporali in S0 dello stesso evento.
Notiamo che:
v 2
c2 t02 − x 02 − y02 − z02 = c2 γ2 t − 2 x − γ2 ( x − vt)2 − y2 − z2 =
c
2 2
2
= c t − x − y2 − z2 .
Allora c2 t2 − x2 − y2 − z2 (che, come vedremo tra poco, può essere riguardato
come la distanza al quadrato nello spaziotempo fra il nostro evento e l’evento
di coordinate (0, 0, 0, 0)) è una quantità scalare invariante per trasformazioni di
Lorentz.
Poniamo x0 = ct e sinh χ = √ v/c2 2 = βγ, con β = v/c. Si ha ovviamente
1−v /c
q
2
cosh χ = 1 + sinh χ = γ. Allora le trasformazioni di Lorentz (relativamente
alle due coordinate che cambiano) posson essere scritte anche nel modo seguente:
x00 = cosh χx0 − sinh χx,
(5.11a)
x = cosh χx − sinh χx0 .
(5.11b)
0
Da queste relazioni si evidenzia una certa analogia con le rotazioni in due dimensioni:
x 0 = cos θx − sin θy,
y0 = sin θx + cos θy.
81
5.1 trasformazioni di lorentz
Questa analogia si estende al fatto che, mentre le rotazioni conservano le lunghezze x2 + y2 , le (5.11) conservano la quantità x02 − x2 , che, come abbiamo accennato,
rappresenta ancora una “distanza al quadrato” nello spaziotempo. Le trasformazioni di Lorentz, come si evince dalla (5.11), possono allora esere considerate come
“rotazioni generalizzate” nello spaziotempo. Supponiamo di avere un evento A
definito da ( x A , y A , z A , t A ) e un evento B definito da ( x B , y B , z B , t B ) nel sistema
di riferimento inerziale S. Possiamo definire il quadrato della distanza tra i due
eventi nel modo seguente:
∆s2 = c2 (t B − t A )2 − ( x B − x A )2 − (y B − y A )2 − (z B − z A )2
= c2 ∆t2 − ∆x2 − ∆y2 − ∆z2
(5.12)
dove, ovviamente, ∆t2 rappresenta l’intervallo temporale tra i due eventi al quadrato e ∆x2 + ∆y2 + ∆z2 l’intervallo spaziale al quadrato. Nel sistema S0 la distanza al quadrato tra i due eventi è data da ∆s02 = c2 ∆t02 − ∆x 02 − ∆y02 − ∆z02 , con
∆t0 = t0B − t0A , ∆x 0 = x 0B − x 0A , ∆y0 = y0B − y0A , ∆z0 = z0B − z0A . Si può agevolmente
dimostrare che ∆s2 = ∆s02 . Possiamo riscrivere la (5.12) in forma differenziale
ds2 = c2 dt2 − dx2 − dy2 − dz2 .
Il fatto che le coordinate spaziali e quelle temporali abbiano segni opposti nella
definizione di distanza al quadrato tra due eventi è una caratteristica dello spaziotempo. Osserviamo che per un segnale luminoso ds2 = 0. Se una particella
si muove con velocità inferiore alla velocità della luce, si ha ds2 > 0 e, quindi ds
è reale. In tal caso si dice che l’intervallo è di genere tempo. Se invece ds2 < 0
l’intervallo è detto di genere spazio. Gli intervalli per i quali ds2 = 0 si dicono di
tipo luce.
Tardioni si dicono i punti materiali che si muovono con velocità inferiore a quella
della luce, tachioni i corpi (immaginari) che si muovono con velocità superiore a
quella della luce. I corpi che si muovono alla velocità della luce si dicono di tipo
luce.
Osserviamo che due eventi separati da un intervallo di tipo tempo non possono
mai essere simultanei, cioè non esiste un sistema di riferimento in cui tali eventi
risultino simultanei. Invece è possibile trovare un sistema di riferimento in cui
i due eventi si verifichino nello stesso luogo, cioè l’intervallo spaziale tra i due
eventi sia nullo.
In relazione a un determinato sistema di riferimento inerziale S, possiamo rappresentare gli eventi associando agli assi cartesiani x, y, z un quarto asse, quello
del tempo. Per facilitare la visualizzazione consideriamo un solo asse spaziale,
quello delle x (figura 5.2). Gli assi x e ct sono assunti ortogonali; si tratta di una
scelta di pura convenienza. Fatta questa scelta, in un altro sistema di riferimento inerziale S0 , che si muove rispetto a S con velocità costante diretta lungo la
direzione positiva dell’asse x, x 0 e ct0 non sono più ortogonali. Il punto O rappresenta l’evento (0, 0). Il moto rettilineo uniforme di una particella con velocità
V < c, passante per x = 0 al tempo t = 0, è rappresentato da una retta passante per O e formante con l’asse ct un angolo inferiore a π/4. Le due rette limite
rappresentano la propagazione di segnali che viaggiano alla velocità della luce.
82
5.1 trasformazioni di lorentz
ct
a
c
tempo futuro
Futuro assoluto
Altrove
π
4
O
Altrove
io
x
osservatore
Passato assoluto
d
b
spaz
no
iperpeiasente
pr
spa
zio
tempo passato
Figura 5.2: Diagramma di Minkowski: a sinistra considerando una sola dimensione
spaziale, a destra considerate due dimensioni spaziali.
All’interno della regione (cono) aOc abbiamo c2 t2 − x2 > 0, cioè l’intervallo tra
l’evento ( x, t) e l’evento (0, 0) è di tipo tempo. In tale regione t > 0, cioè ogni
evento ha luogo dopo l’evento O. Poiché due eventi, separati da un intervallo di
tipo tempo, non possono mai essere simultanei in alcun riferimento inerziale, non
è possibile scegliere un sistema di riferimento in cui un arbitrario evento, posto
all’interno della regione aOc, abbia luogo prima di O, cioè avvenga al tempo t < 0.
Tutti gli eventi all’interno di aOc sono, allora, posteriori a O, fanno cioè parte della
regione del futuro assoluto (la quale, nel caso si consideri più di una dimensione
spaziale, è un cono o un ipercono, detto appunto cono del futuro).
Nello stesso modo si può far vedere che ogni evento posto in dOb avviene prima
dell’evento O, e questo è vero in qualunque riferimento inerziale. La regione dOb
è detta appunto del passato assoluto (cono del passato).
Sottolineiamo che gli eventi posti nel passato e nel futuro possono essere messi
in relazione causale con l’evento O.
Gli eventi all’interno delle regioni aOd e cOb sono separati dall’evento O da un
intervallo di tipo spazio. Se D è un evento in tali regioni, si può sempre trovare
un riferimento inerziale in cui D e O sono simultanei, anche se non possono mai
avvenire nello stesso luogo per alcun riferimento. Esistono sistemi di riferimento
in cui D avviene prima di O e altri in cui avviene dopo. La regione tra il cono del
futuro e il cono del passato è indicata come il presente di O (o anche come l’altrove
assoluto di O, perché, come abbiamo detto, in nessun sistema di riferimento un
evento, che appartiene a questa regione, e l’evento O possono verificarsi nello
stesso luogo).
Gli eventi posti lungo le bisettrici appartengono al cono-luce e sono connessi
per l’appunto all’evento O da segnali luminosi.
Riassumendo in relatività
• il futuro è individuato dagli eventi che soddisfano la relazione ct > | x |;
• il presente è individuato dagli eventi che soddisfano la relazione |ct| < | x |;
• il passato è individuato dagli eventi che soddisfano la relazione −ct > | x |.
83
5.2 alcune conseguenze delle trasformazioni di lorentz
Notiamo che nell’ambito della fisica non relativistica (o newtoniana) rispetto a O
• il futuro si ha per t > 0;
• il presente si ha per t = 0;
• il passato si ha per t < 0.
Infine osserviamo che il ragionamento svolto per l’evento O si può ripetere per
ogni altro evento. Questo vuol dire che a ogni evento possiamo associare un cono
del futuro e un cono del passato.
5.2
alcune conseguenze delle trasformazioni di lorentz
5.2.1 Legge di trasformazione delle velocità
Tra le conseguenze principali delle trasformazioni di Lorentz vi è una diversa legge di trasformazione della velocità rispetto a quella prevista dalle trasformazioni
galileiane. Dovremo, ovviamente, ritrovare che la velocità della luce (nel vuoto)
è un invariante relativistico, cioè ha lo stesso valore in tutti i sistemi di riferimento inerziali. Consideriamo i sistemi di riferimento inerziali S ed S0 già visti. Le
componenti3 del vettore velocità di una particella rispetto a S sono:
Vx =
dx (t)
dt
Vy =
dy(t)
dt
Vz =
dz(t)
.
dt
Vz0 =
dz0 (t0 )
.
dt0
Le corrispondenti componenti rispetto a S0 saranno
Vx0 =
dx 0 (t0 )
dt0
Vy0 =
dy0 (t0 )
dt0
Dalle trasformazioni di Lorentz si ottiene:
dx = γ(dx 0 + v dt0 ) = γ(Vx0 + v) dt0 ,
dy = dy0 = Vy0 dt0 ,
dz = dz0 = Vz0 dt0 ,
v
v dt = γ dt0 + 2 dx 0 = γ 1 + 2 Vx0 dt0 .
c
c
Da queste relazioni ricaviamo:
Vx =
Vy =
Vz =
dx
V0 + v
= x v 0,
dt
1 + c2 Vx
(5.13a)
Vy0
1
dy
=
,
dt
γ 1 + cv2 Vx0
(5.13b)
dz
1
Vz0
=
.
dt
γ 1 + cv2 Vx0
(5.13c)
3 Supponiamo assegnata in S la legge oraria della particella ( x (t), y(t), z(t)) e la corrispondente legge
oraria in S0 ( x 0 (t0 ), y0 (t0 ), z0 (t0 )).
84
5.2 alcune conseguenze delle trasformazioni di lorentz
8
7
6
5
γ
4
3
2
1
0
0
0.2
0.4
0.6
0.8
1
β
Figura 5.3: Andamento del fattore di Lorentz γ in funzione di β.
Osserviamo che se c → +∞, allora γ = 1 (o anche se v/c 1, allora γ ≈ 1) e
Vx = Vx0 + v
Vy = Vy0
Vz = Vz0 .
cioè otteniamo la trasformazione galileiana della velocità. Facilmente si ottiene
dalle (5.13) la trasformazione inversa:
Vx − v
,
1 − cv2 Vx
Vy
1
Vy0 =
,
γ 1 − cv2 Vx
1
Vz
.
Vz0 =
γ 1 − cv2 Vx
Vx0 =
(5.14a)
(5.14b)
(5.14c)
p
√
Ricordiamo che γ = 1/ 1 − v2 /c2 = 1/ 1 − β2 , dove β = v/c. Osserviamo che
lim γ( β) = 1,
lim γ( β) = +∞.
β → 0+
β → 1−
Se Vy0 = Vz0 = 0 e Vx0 = V 0 , allora dalle (5.13) otteniamo
Vx = V =
V0 + v
,
1 + cv2 V 0
Vy = 0,
Vz = 0.
(5.15)
Se V 0 = c (velocità della luce nel vuoto) allora dalla precedente si ha V = c.
Inoltre sempre dalla precedente se 0 < V 0 < c, allora 0 < V < c (e viceversa).4
Esercizio
2
2
2
Dimostrare che, se v0 x + v0 y + v0 z = c2 , allora v2x + v2y + v2z = c2 e viceversa.
4 Noi supponiamo che v ∈ (0, c).
85
5.2 alcune conseguenze delle trasformazioni di lorentz
5.2.2 Contrazione delle lunghezze
Si chiama lunghezza propria di un’asta la sua lunghezza in un sistema di riferimento in cui è in quiete. Supponiamo di avere un’asta rigida in quiete in S e posta
lungo l’asse x. Se le sue estremità sono nei punti di coordinata x1 e x2 > x1 , la
sua lunghezza propria è ovviamente data da:
l0 = x 2 − x 1 .
Per misurare la lunghezza dell’asta nel sistema di riferimento S0 , che si muove
rispetto a S con una velocità v diretta lungo la direzione positiva dell’asse x, basta
avere le coordinate degli estremi dell’asta nello stesso istante di tempo e dunque
valutare gli eventi ( x10 , t10 ) e ( x20 , t20 ) con t10 = t20 . I due eventi sono simultanei in
S0 ma non in S. Naturalmente, per misurare la lunghezza propria in S possiamo
determinare gli estremi dell’asta in tempi diversi e abitrari. Sappiamo che
x = γ( x 0 + vt0 )
e, quindi,
x1 = γ( x10 + vt10 )
x2 = γ( x20 + vt10 )
=⇒
x2 − x1 = γ( x20 − x10 ).
Chiamata l = x20 − x10 la lunghezza dell’asta in S0 , avremo allora
r
v2
l0 = γl ⇐⇒ l = 1 − 2 l0 < l0 .
c
(5.16)
Il sistema S0 , che è in moto rispetto all’asta, misura, pertanto, una lunghezza minore della lunghezza propria dell’asta. Questo fenomeno è noto come contrazione
delle lunghezze.
Esercizio
La lunghezza dell’asta rispetto al sistema di riferimento S0 può essere determinata considerando i suoi estremi nella stessa posizione in tempi diversi? In caso
affermativo, qual è la relazione tra questa lunghezza dell’asta e la sua lunghezza
a riposo?
5.2.3 Dilatazione dei tempi
La dilatazione dei tempi è una delle conseguenze più straordinarie della relatività
ristretta. Consideriamo due sistemi di riferimento inerziali S e S0 come in figura
5.1 e supponiamo che un orologio, a riposo nel sistema di riferimento inerziale
S0 , misuri in uno stesso punto dello spazio x00 un intervallo temporale tra due
eventi A : ( x00 , t0A ) e B : ( x00 , t0B ), con t0B > t0A . L’intervallo temporale tra i due eventi
86
5.2 alcune conseguenze delle trasformazioni di lorentz
∆τ = t0B − t0A è detto tempo proprio. La loro distanza è ovviamente di tipo tempo.
Nel sistema S i due eventi A e B hanno le seguenti coordinate spaziotemporali:
x A = γ( x00 + vt0A ),
v t A = γ t0A + 2 x00 ,
c
x B = γ( x00 + vt0B ),
v t B = γ t0B + 2 x00 .
c
Allora
∆t = t B − t A = γ∆τ > ∆τ,
(5.17)
cioè l’intervallo di tempo tra i due eventi, misurato in S, risulta maggiore dell’intervallo di tempo proprio. Questo risultato ci dice che l’orologio mobile rispetto a
S ha una frequenza minore. Possiamo, in altre parole, affermare che la frequenza
di un orologio mobile rallenta rispetto a quella di un orologio fermo. Notiamo
che in S0 i due eventi avvengono nello stesso luogo e il loro intervallo temporale
è misurato da un solo orologio posto in quel punto (intervallo di tempo proprio),
mentre nell’altro sistema di riferimento S i due eventi si verificano in punti diversi
dello spazio e occorrono due orologi per misurare il loro intervallo di tempo (non
proprio).
Vediamo di capire meglio con un esempio. Supponiamo che in S0 una sorgente
luminosa posta nell’origine emetta al tempo t0 = 0 un raggio di luce in direzione dell’asse y0 e che uno specchio, posto a distanza L, rifletta il raggio di luce
facendolo tornare in O0 (figura a). Ovviamente avremo ∆τ = 2L/c. Questo è il
tempo complessivo che il raggio di luce impiega per tornare in O0 nel sistema
S0 . L’intervallo di tempo trovato è, naturalmente, proprio. Vediamo ora quale
ragionamento fa il sistema S, supponendo che al tempo t = t0 = 0 (quando viene
emesso il raggio di luce) O ≡ O0 . Lo specchio è solidale con S0 che si muove con
velocità v nella direzione positiva dell’asse delle x. Il raggio luminoso avrà in S
una traiettoria come quella in figura in b. Il sistema S ha bisogno di due orologi,
uno in O l’altro in R (ovviamente sincronizzati) per valutare l’intervallo temporale
87
5.3 lo spazio di minkowski
∆t, che il raggio luminoso impiega per tornare sull’asse delle x. Tenendo presente
la figura precedente in b si ottiene facilmente:
c∆t
2
2
=
v∆t
2
2
+ L2 ,
c2 ∆t2 = v2 ∆t2 + 4L2 ,
2L/c
∆t = √
= γ∆τ.
1 − v2 /c2
Ritroviamo, cioè, nell’esempio specifico, la formula (5.17) relativa alla dilatazione
dei tempi.
5.3
lo spazio di minkowski
In maniera molto sintetica possiamo dire che lo spazio vettoriale di Minkowski,
M, è lo spaziotempo. Un punto di tale spazio è, come abbiamo già avuto modo
di dire, un evento.
Le coordinate di un punto-evento, in un sistema di riferimento S, possono essere definite come ( x0 , x1 , x2 , x3 ) = (ct, x, y, z) (notare che tutte le componenti hanno
le dimensioni di una lunghezza). Le coordinate x µ (µ = 0, 1, 2, 3),5 con la convenzione dell’indice in alto, sono dette controvarianti e si trasformano passando da un
sistema S a uno S0 nel solito modo:
x 00 = γ( x0 − βx1 ),
x 01 = γ( x1 − βx0 ),
(5.18)
x 02 = x 2 ,
x 03 = x 3 .
Le precedenti possono essere scritte anche in forma matriciale, adoperando la
notazione di Einstein:
µ
x 0µ = Λν x ν
(5.19)
dove
γ
− βγ
− βγ
γ
µ
Λ = (Λν ) =
0
0
0
0
0
0
1
0
0
0
.
0
1
Il punto evento { x µ } è anche detto quadrivettore controvariante perché obbedisce
µ
alle (5.19). Ricordiamo che in Λν si indica l’elemento alla µ-esima riga e ν-esima
colonna.
5 Da qui in poi, nello spazio di Minkowski, useremo la convenzione che gli indici greci (α, β, . . . , µ,
ν, . . . ) assumono valori 0, 1, 2, 3, invece gli indici latini (i, j, k, . . . ) assumeranno i valori 1, 2, 3.
88
5.3 lo spazio di minkowski
Abbiamo già visto che la distanza al quadrato tra l’evento { x µ } e l’evento
O(0, 0, 0, 0) è definita come s2 = ( x0 )2 − ( x1 )2 − ( x2 )2 − ( x3 )2 . Tale quantità, come ben sappiamo, è un invariante relativistico: assume lo stesso valore in tutti
i riferimenti inerziali. Se introduciamo la seguente matrice, detta tensore metrico
covariante
1 0
0
0
0 −1 0
0
g = ( gµν ) =
0 0 −1 0 .
0
0
0
−1
allora s2 = gµν x µ x ν (con la convenzione degli indici ripetuti). Tramite il tensore
metrico gµν viene introdotta una distanza al quadrato s2 tra l’evento { x µ } e l’evento O(0, 0, 0, 0), la quale è una forma quadratica maggiore, uguale o minore di 0.
Lo spazio di Minkowski viene dotato di una metrica pseudoeuclidea. Notiamo che la
quantità gµν x µ x ν può essere riguardata anche come un prodotto scalare, con l’avvertenza che gµν x µ x ν = 0 ; x µ = 0 per µ = 0, 1, 2, 3. Il nostro tensore metrico è
come si vede lo stesso in ogni punto dello spazio di Minkowski, proprietà che non
sarà valida in relatività generale. Possiamo introdurre le coordinate covarianti di
un punto evento
xµ = gµν x ν
(5.20)
cioè ( x0 , x1 , x2 , x3 ) = ( x0 , − x1 , − x2 , − x3 ). Allora s2 = gµν x µ x ν = xν x ν . Dalle
relazioni (5.18) si ottiene facilmente:
x00 = γ( x0 + βx1 ),
x10 = γ( x1 + βx0 ),
(5.21)
x20 = x2 ,
x30 = x3 .
Queste relazioni possono essere scritte in forma matriciale nel modo seguente:
xµ0 = (Λ−1 )νµ xν
(5.22)
dove
γ βγ 0 0
βγ γ 0 0
.
=
0
0 1 0
0
0 0 1
Λ −1
Si dice che { xµ } è un quadrivettore covariante se obbedisce alle (5.22). Il tensore
metrico controvariante è definito nel modo seguente: ( gµν ) = g −1 . Osserviamo che
in M abbiamo g = g −1 . Chiaramente vale la relazione:
gµν gνλ = δµλ .
(simbolo di Kronecker)
89
5.3 lo spazio di minkowski
Se con ∆x µ indichiamo la variazione tra le coordinate omologhe controvarianti di
due eventi, la distanza al quadrato tra questi due eventi è naturalmente data da:
∆s2 = gµν ∆x µ ∆x ν .
Possiamo dare una versione infinitesima della metrica se prendiamo due eventi
“molto vicini tra loro”:
ds2 = gµν dx µ dx ν = dxν dx ν .
Questa forma quadratica differenziale dà ovviamente la metrica6 di M. Notiamo
µ
che dalla (5.19) dx 0µ = Λν dx ν ed essendo
dx 0µ =
∂x 0µ
dx ν
∂x ν
si ha:
µ
Λν =
∂x 0µ
.
∂x ν
Una quaterna ( A0 , A1 , A2 , A3 ) si dice che è un quadrivettore controvariante se
ogni componente Aµ si trasforma per effetto di una trasformazione di Lorentz
µ
x 0µ = Λν x ν nel modo seguente:
µ
A0µ = Λν Aν
cioè nello stesso modo delle coordinate controvarianti di un punto evento. Osserviamo che, se Aν = Aν ( x),7 allora
A 0 ν = A 0 ν ( x 0 ).
Un quadrivettore covariante { Aµ } è un insieme di quattro quantità ( A0 , A1 , A2 , A3 )
che, per effetto di una trasformazione di Lorentz, si trasformano come le coordinate covarianti di un punto evento:
A0µ = Aν (Λ−1 )νµ .
Osserviamo che possiamo ottenere Aµ moltiplicando il corrispondente quadrivettore controvariante per il tensore metrico covariante, ovvero:
Aµ = gµν Aν .
Inversamente si ha
Aµ = gµν Aν ,
dove gµν è il tensore metrico controvariante.
6 Prendendo la forma quadratica differenziale per definire la metrica includiamo anche il caso in cui
il tensore metrico dipende dal punto.
7 Con x intendiamo ( x0 , x1 , x2 , x3 ).
90
5.3 lo spazio di minkowski
Un quadritensore di rango n completamente controvariante ha la forma T µ1 ,...,µn e si
trasforma nel modo seguente:
µ
µ
µ
T 0µ1 ,...,µn = Λν11 Λν22 · · · Λνnn T ν1 ,...,νn .
Un quadritensore di rango n completamente covariante ha la forma Tµ1 ,...,µn e si trasforma nel modo seguente:
Tµ0 1 ,...,µn = Tν1 ,...,νn (Λ−1 )νµ11 (Λ−1 )νµ22 · · · (Λ−1 )νµnn .
Un quadritensore di rango n p volte controvariante e q volte covariante ha la forma
µ ,...,µ
Tν11,...,νq p e si trasforma nel modo seguente:
0µ ,...,µ
µ
µ
σ
λ ,...,λ
p
1
Tν1 ,...,ν
= Λλ11 · · · Λλpp (Λ−1 )σν11 · · · (Λ−1 )νqq Tσ11,...,σq p .
q
Osserviamo che:
• un quadritensore di rango 1 è un quadrivettore;
• un quadritensore di rango 0 è uno scalare ed è invariante per trasformazioni
di Lorentz (è detto anche scalare di Lorentz).
I quadritensori di rango 2, che hanno, ovviamente, 16 componenti, si trasformano
nel modo seguente:
µ
• tensori completamente controvarianti: T 0µν = Λα Λνβ T αβ ;
β
0 = ( Λ −1 ) α ( Λ −1 ) T ;
• tensori completamente covarianti: Tµν
ν αβ
µ
0µ
µ
β
• tensori misti: Tν = Λα (Λ−1 )ν Tβα .
In generale si dice che il tensore metrico covariante abbassa gli indici, il tensore metrico controvariante li innalza. Un quadritensore di rango 2 T µν si dice
simmetrico se T µν = T νµ ; si dice antisimmetrico se T µν = − T νµ . Un generico
quadritensore può essere sempre scomposto in una parte simmetrica e una antiµν
simmetrica. Infatti Ts = ( T µν + T νµ ) /2 è un quadritensore simmetrico, mentre
µν
µν
µν
Ta = ( T µν − T νµ ) /2 è antisimmetrico; infine T µν = Ta + Ts .
Il prodotto scalare tra due quadrivettori A = { Aµ } e B = { Bν } è definito come
A · B = gµν Aµ Bν = A0 B0 − A1 B1 − A2 B2 − A3 B3 . Un quadrivettore A = { Aµ }
si dice di tipo tempo se A · A > 0, di tipo spazio se A · A < 0, di tipo luce se
A · A = 0.
Esercizi
• Dimostrare che, se S( x ) è uno scalare di Lorentz ed è di classe opportuna, allora ∂S( x )/∂x µ è un quadrivettore covariante, mentre ∂S( x )/∂xµ è un
quadrivettore controvariante.
91
5.4 quadrivelocità e quadriaccelerazione
µ ,...,µ
• Dimostrare che, se Tν11,...,νq p ( x ) è un tensore p volte controvariante e q volte
µ ,...,µ
controvariante (di classe opportuna) allora ∂Tν11,...,νq p ( x )/∂x α è un tensore p
µ ,...,µ
volte controvariante e q + 1 volte covariante, mentre ∂Tν11,...,νq p ( x )/∂xα è un
tensore p + 1 volte controvariante e q volte covariante.
• Dimostrare che gµν è un tensore covariante di rango 2.
• Dimostrare che gµν è un tensore controvariante di rango 2.
5.4
quadrivelocità e quadriaccelerazione
Nella meccanica newtoniana se il moto di una particella è descritto dalla legge
oraria ~r = ~r (t) (di classe opportuna), la velocità è definita come ~v(t) = d~r (t)/dt.
In relatività ristretta il tempo è una componente di un quadrivettore e non uno
scalare di Lorentz. Poiché è utile scrivere le equazioni della fisica in modo tale
che risultino manifestamente valide in ogni sistema di riferimento inerziale (formulazione covariante delle leggi della fisica), conviene parametrizzare il moto
di una particella massiva, nello spazio di Minkowski, rispetto a una grandezza
che sia uno scalare di Lorentz. La scelta naturale è l’invariante s, definito da
ds2 = gµν dx µ dx ν , che può essere chiamato cammino proprio. Avremo allora, in M,
la cosiddetta linea d’universo x µ = x µ (s), che non è altro che una curva (successione di eventi propri della particella in moto). Se, come abbiamo detto, la particella
ha massa, allora ds2 = c2 (1 − v2 /c2 ) dt2 > 0 essendo |v(t)| < c la velocità della particella al tempo8 t. Possiamo scrivere, indicato con τ il tempo proprio e
assumendo la convenzione che s sia crescente al variare del tempo:
r
v2
ds = 1 − 2 c dt = c dτ.
c
Il quadrivettore velocità (o semplicemente quadrivelocità) controvariante di una
particella massiva, il cui moto in M è descritto dalla linea d’universo x µ = x µ (s),
è definito come9
uµ =
dx µ
dx µ
dx µ
=
=γ
ds
c dτ
c dt
(5.23)
dove
γ= √
1
1 − v2 /c2
è il fattore di Lorentz della particella, non di un sistema di riferimento. Chiaramente u = {uµ } è un quadrivettore controvariante perché si trasforma come
µ
u0µ = Λν uν . Osserviamo che:
8 Nel caso di una particella di massa nulla o di un raggio luminoso, poiché ds2 = 0 occorre introdurre
un parametro scalare diverso dal tempo proprio.
9 Alcuni definiscono la quadrivelocità come uµ = cdx µ /ds. In tal caso uµ ha le dimensioni di una
velocità, mentre nel nostro caso è adimensionale.
92
5.5 dinamica relativistica
• le componenti della quadrivelocità sono
v
vy vz x
u = γ, γ, γ, γ ;
c
c
c
• sussiste la relazione
µ ν
u · u = gµν u u = γ
2
v2
1− 2
c
= 1.
(5.24)
Definiamo la quadriaccelerazione controvariante come:
wµ =
d2 x µ
duµ
=
.
ds
ds2
In base alla (5.24) otteniamo
gµν uµ
duν
= 0 ⇐⇒ gµν uµ wν = 0 ⇐⇒ u · w = 0.
ds
Ovvero quadrivelocità e quadriaccelerazione sono ortogonali.
Esercizio
Dimostrare che le componenti della quadriaccelerazione sono
γ4
~v ·~a,
c3
γ2 i γ2
i
i
w = 2 a + 2 (~v ·~a)v
c
c
w0 =
con i = 1, 2, 3, ( a1 , a2 , a3 ) = ( a x , ay , az ) e (v1 , v2 , v3 ) = (v x , vy , vz ).
5.5
dinamica relativistica
Si può facilmente constatare che in relatività ristretta, a causa della legge di composizione delle velocità, se il momento di una particella avente massa a riposo
m0 è definito come ~p = m0~v, allora la conservazione del momento di sistemi di
particelle isolati non è più valida in ogni sistema di riferimento inerziale.10 Se richiediamo che la conservazione del momento in sistemi isolati sia una legge della
Fisica, bisogna allora definire in relatività il momento come:
~p = √
m0
1 − v2 /c2
~v = m(v)~v
(5.25)
= γm0
(5.26)
dove
m(v) = √
m0
1 − v2 /c2
10 Si veda Kittel, Knight e Ruderman [4, pagine 411–416].
93
5.5 dinamica relativistica
può essere riguardata come la massa relativistica della particella. Osserviamo che
se v/c 1, allora m(v) ≈ m0 e ~p ≈ m0~v, come in meccanica newtoniana.
Studi sperimentali hanno mostrato che la ii legge della dinamica continua
ancora a valere, cioè nel caso di una particella:
d~p ~
=F
dt
(5.27)
dove ~p è il momento relativistico ed ~F è la forza totale agente sulla particella.
La (5.27), in base alla (5.25), può essere scritta come
dm0 γ(v)~v ~
= F.
(5.28)
dt
Se v/c 1 si ottiene la relazione non relativistica. Due osservazioni sulla (5.28):
1. se il modulo della velocità della particella aumenta e si approssima a c, il
termine γ tende a smorzare tale incremento;
2. se richiediamo che la (5.28) sia una legge della Fisica, quando si passa da un
sistema di riferimento inerziale a un altro, a differenza di quanto avviene
nella meccanica newtoniana, la forza ~F deve cambiare esattamente come
cambia dm0 γ~v/dt.
Dalla (5.28) otteniamo
m0 γ~a + m0
dγ
~v = ~F
dt
(5.29)
dove ~a = d~v/dt è l’ordinaria accelerazione. Poiché dγ/dt = γ3~v ·~a/c2 , la (5.29)
diventa
γ3
(~v ·~a)~v = ~F.
c2
Moltiplicando scalarmente per ~v ambo i membri della precedente si ha:
m0 γ~a + m0
(5.30)
γ3
m0 γ~v ·~a + m0 2 v2 (~v ·~a) = ~F · ~v
c
γ2
m0 γ(~v ·~a) 1 + 2 v2 = ~F · ~v
c
3
m0 γ ~v ·~a = ~F · ~v
(5.31)
essendo 1 + γ2 v2 /c2 = γ2 . Inserendo la (5.31) nella (5.30) otteniamo:
~v
= ~F
c2
!
~F · ~v
~F −
~v .
c2
m0 γ~a + (~F · ~v)
m0~a =
1
γ
(5.32)
Notiamo che se ~F, ~v,~a sono vettori paralleli, allora la (5.32) diventa
m0 γ3~a = ~F
(basta tener conto che in questo caso ~F − (~F · ~v)~v/c2 = ~F/γ2 ).
94
5.6 energia cinetica e momenti
5.6
energia cinetica e momenti
Sia ~F la forza totale agente su una particella di massa a riposo m0 . Vogliamo ora
vedere come determinare l’energia cinetica della particella. L’idea è di partire, in
analogia a quanto avviene in meccanica newtoniana, dalla relazione dT = ~F · d~r,
cioè la variazione infinitesima di energia cinetica, dT, è supposta uguale al lavoro
elementare della forza totale. Teniamo presente che ~F · d~r = ~F · ~v dt = m0 γ3~v ·~a dt
in base alla (5.31). Possiamo pertanto scrivere
dT = m0 γ3~v ·~a dt = m0 γ3~v · d~v =
Poiché
1
2
R v2
0
T= √
1
m0 γ3 dv2 .
2
γ3 (v0 ) dv02 = c2 γ − c2 , abbiamo
m0 c2
1 − v2 /c2
− m0 c2
(5.33)
(notare che nel ricavare la precedente abbiamo supposto nulla la velocità iniziale).
Per v/c 1, allora
T=
1
m0 v2 + O(v4 ),
2
cioè ritroviamo, al primo ordine, il valore non relativistico dell’energia cinetica.
Dalle (5.33) si deduce che l’energia non è proporzionale a v2 (come nel caso
non relativistico) e inoltre che limv→c− T = +∞. Si definisce energia totale della
particella la quantità:
E = T + m0 c2 = m0 c2 γ.
Il termine m0 c2 è detto energia a riposo della particella (cioè, se v = 0, E = m0 c2 )
e rappresenta una novità sorprendente ed eccezionale rispetto al caso non relativistico. Esso, in qualche modo, stabilisce un’equivalenza tra massa ed energia
e asserisce che la massa può essere convertita in energia e viceversa l’energia in
massa. Questa equivalenza non ha riscontro alcuno nella fisica newtoniana. Osserviamo che in relatività non vale la conservazione della massa. In un processo
fisico, cui prendono parte diverse particelle, ciò che si conserva non è la massa
totale ma l’energia totale. Notiamo per inciso che dE/dt = ~F · ~v. Poiché m0 c2 ha
le dimensioni di un’energia, la massa a riposo può essere misurata in eV/c2 .
Tra l’energia e il momento di una particella libera esiste una relazione particolare. Infatti
m20 c4 γ2
E2
2
−
p
=
− m20 v2 γ2 = m20 c2 .
c2
c2
(5.34)
Questa relazione può essere riscritta come
E2 = p2 c2 + m20 c4
(5.35)
95
5.7 quadrimomento, tensore momento angolare
da cui11
E=
q
p2 c2 + m20 c4 .
(5.36)
Osserviamo che la (5.36) prende il posto della relazione non relativistica E =
p2 /(2m0 ) (intendendo qui con E l’energia cinetica della particella libera). La (5.35)
ha enorme importanza in quanto, come vedremo fra poco, la quantità E2 − c2 p2
è un invariante relativistico (scalare di Lorentz). Dalla (5.34) si vede subito che il
momento può essere misurato in eV/c e suoi multipli.
Una particolarità notevole della relatività è la possibilità di considerare particelle con massa nulla. Infatti dalla (5.35) deduciamo che se m0 = 0
E = pc.
(5.37)
Ovviamente le espressioni E = m0 c2 γ e ~p = m0~vγ in cui compare la massa perdono di significato per una particella di massa nulla. Se m0 = 0 l’energia rimane
finita senza annullarsi, in quanto v = c. Notiamo che bisogna fare il doppio limite
m0 → 0+ e v → c− : ciò rende finita e non nulla l’energia.
Stesso discorso vale per il momento. Sottolineiamo che, nel caso di particelle
con massa nulla, vale certamente la (5.37), che stabilisce un preciso legame tra
energia e momento. In natura esistono, effettivamente, particelle di massa nulla,
come per esempio i fotoni. In base alla relazione di Planck-Einstein, l’energia di
un fotone di frequenza ν è data da
E = hν
(5.38)
dove h = 6.626 · 10−34 J · s è la costante di Planck e ha le dimensioni di un’azione.
Se indichiamo con ω = 2πν la pulsazione della radiazione, la (5.38) può scriversi
come E = hω/(2π ) = }ω. Allora il momento di un fotone di frequenza ν è dato
da
p=
E
hν
h
ω
=
= = } = }k
c
c
λ
c
dove λ è la lunghezza d’onda della radiazione e k = ω/c è il numero d’onda.
5.7
quadrimomento, tensore momento angolare
La relazione (5.35) ci induce a pensare che energia e momento di una particella
possano essere componenti di uno stesso quadrivettore. Effettivamente è così;
infatti il quadrivettore (controvariante)
pµ = m0 cuµ
(5.39)
11 Nello scrivere la (5.36) abbiamo considerato solo la soluzione positiva e scartato quella negativa. Si
può far vedere nell’ambito della fisica classica che non vi sono motivi per ammettere stati di energia
negativi. Discorso diverso va fatto per la meccanica quantistica, dove non è possibile ignorare, a
priori, stati di energia negativa.
96
5.8 equazioni del moto
dove m0 è la massa a riposo della particella e uµ la sua quadrivelocità, ha come
componenti
E
,
c
p2 = m0 γvy ≡ py ,
p0 = m0 γc ≡
p1 = m0 γv x ≡ p x ,
p3 = m0 γvz ≡ pz .
Il quadrivettore definito dalla (5.39) è, allora, detto quadrimomento. Si ha come
conseguenza che gµν pµ pν = E2 /c2 − p2 = m20 c2 è certamente un invariante relativistico, come avevamo annunciato. Inoltre passando dal sistema di riferimento
inerziale S al sistema S0 le componenti del quadrimomento si trasformano nel
modo seguente:
00
p = γ( p0 − βp1 )
01
p = γ( p1 − βp0 )
.
(5.40)
p 02 = p 2
03
p = p3
Le precedenti possono essere scritte in termini di E, p x , py , pz come:
0
E
E
=
γ
−
βp
x
c
c
E
0
px = γ px − β
.
c
p0 = py
y0
pz = pz
Nel caso in cui m0 = 0 (particella di massa nulla) si ha gµν pµ pν = 0: il quadrimomento è ovviamente di tipo luce. Possiamo definire il tensore del momento
angolare (controvariante di rango 2 e antisimmetrico) come
Lµν = x µ pν − x ν pµ .
(5.41)
µ
µ
Notiamo che L0µν = x 0µ p0ν − x 0ν p0µ = Λα Λνβ ( x α p β − x β pα ) = Λα Λνβ Lαβ . Si verifica
facilmente che, detto ~L = ~r × ~p l’ordinario vettore momento angolare rispetto
all’origine degli assi cartesiani ortogonali, L12 = Lz , L31 = Ly , L23 = L x .
5.8
equazioni del moto
Nel caso di una particella libera di massa m0 sappiamo che d~p/dt = 0 e dE/dt =
0, dove ~p = m0 γ~v e E = m0 c2 γ. Poiché le componenti del quadrimomento sono
date da p = ( E/c, ~p) è evidente che le precedenti equivalgono alla condizione
dp
= 0.
(5.42)
ds
La (5.42) costituisce, allora, l’equazione covariante del moto di una particella libera e può essere anche scritta, tenendo presente che pµ = m0 cuµ = m0 cdx µ /ds
come
d2 x µ
= 0.
ds2
97
5.9 meccanica analitica relativistica (cenni)
Questa è la forma covariante dell’equazione di una particella libera e corrisponde
all’espressione non covariante d2~r/dt2 = 0. Se la particella non è libera, ma soggetta a interazioni, la derivata rispetto a s del quadrimomento è diversa da zero,
in generale. Possiamo definire come quadriforza il quadrivettore controvariante:
F=
dp
.
ds
(5.43)
La (5.43) può essere scritta in modo equivalente:
m0 c
du
= m0 cw = F.
ds
Questa equazione, detta di Minkowski, rappresenta l’equazione del moto della
particella in forma covariante. Le componenti della quadriforza F sono
γ dE γ d~p
F=
,
.
c2 dt c dt
Dal momento che ~F = d~p/dt e dE/dt = ~F · ~v, le componenti della quadriforza
possono essere scritte anche come:
γ
γ F = 2 ~F · ~v, ~F .
c
c
Come conseguenza dell’ortogonalità tra quadrivelocità e quadriaccelerazione abbiamo che la quadrivelocità è ortogonale alla quadriforza, cioè F · u = 0. Possiamo
anche definire il momento relativistico della quadriforza come il tensore controvariante di rango 2 antisimmetrico N µν = x µ F ν − x ν F µ . Si verifica immediatamente
che
dLµν
= N µν .
ds
5.9
meccanica analitica relativistica (cenni)
Si può enunciare anche in meccanica relativistica il principio variazionale di Hamilton, dal quale poi ricavare le equazioni del moto delle particelle materiali.
Consideriamo, prima, il caso di una particella materiale libera. Come possiamo
esprimere l’azione? Ovviamente dobbiamo richiedere che l’integrale, che esprime
l’azione, sia invariante per trasformazioni di Lorentz e, quindi, sia uno scalare di
Lorentz. Per una particella libera viene naturale pensare, come scalare di Lorentz, all’intervallo infinitesimo ds o più in generale ad α ds con α costante. L’idea,
allora, è di considerare l’azione data da:
S=α
Z b
a
ds
(5.44)
dove a e b rappresentano due punti eventi dello spazio di Minkowski M. Come
già sappiamo, devono essere considerati tutti i moti ammissibili (linee d’universo) che partono dall’evento a e giungono all’evento b. Il moto reale è ottenuto
98
5.9 meccanica analitica relativistica (cenni)
imponendo δS = 0 fra tutte le linee d’universo ammissibili. Per determinare, poi,
la costante α dobbiamo richiedere che nell’approssimazione non relativistica la
(5.44) diventi, a meno di costanti additive, uguale all’azione di una particella non
relativistica libera di massa nota.
√
Se ora teniamo conto che per una particella materiale ds = c 1 − v2 /c2 dt, la
(5.44) può essere scritta
Z t1 r
v2
1 − 2 dt ,
(5.45)
S[ x (t), y(t), z(t)] = αc
c
t0
dove v2 (t) = ẋ2 (t) + ẏ2 (t) + ż2 (t). Dalla (5.45) si deduce che la lagrangiana è data
da:
r
v2
L = αc 1 − 2 .
(5.46)
c
Se procediamo esattamente come nel caso non relativistico, per il principio variazionale di Hamilton abbiamo:
d ∂L ~
=0
dt ∂~v
(5.47)
perché L non dipende esplicitamente da ~x. Dalle relazioni (5.46) e (5.47) si ottiene:
αc
∂L
vx
= −√
= costante
2
2
∂v x
1 − v /c c2
vy
∂L
αc
= −√
= costante
∂vy
1 − v2 /c2 c2
αc
vz
∂L
= −√
= costante
∂vz
1 − v2 /c2 c2
quindi
2
2
α
v2
√ ~v
= α
= costante
c 1 − v2 /c2 c2 1 − v2 /c2
da cui discende che v2 è una quantità costante. Inoltre dalla (5.47) abbiamo anche
~v
d ∂L
d
α
=
− √
= ~0
dt ∂~v
d
c 1 − v2 /c2
quindi
d~v ~
= 0 ⇐⇒ ~v(t) = costante,
dt
cioè il moto della particella libera che rende stazionaria l’azione è quello rettilineo
uniforme.
Sia m0 la massa a riposo della particella. La sua lagrangiana è data dalla (5.46).
Per v/c 1 questa diventa:
4
1 v2
v
L = αc − αc 2 + O
,
2 c
c4
99
5.9 meccanica analitica relativistica (cenni)
dove αc è una costante che non influenza le equazioni del moto. Nel caso non
relativistico invece (a meno di costanti additive):
L=
1
m0 v2 .
2
Per il principio di corrispondenza queste due espressioni devono essere uguali,
quindi trascurando i termini di ordine superiore a v4 /c4 e la costante additiva αc
abbiamo α = −m0 c. In conclusione la lagrangiana della particella relativistica di
massa m0 è data da:
r
v2
2
L = − m0 c 1 − 2 .
c
Il momento della particella è definito come
~p =
∂L
m0~v
=√
∂~v
1 − v2 /c2
(esattamente il valore che, come abbiamo detto, permette che la conservazione del
momento di sistemi isolati sia una legge della Fisica). Notiamo, solo per inciso,
che nel caso esaminato (particella libera) d~p/dt = 0. Possiamo chiamare energia
la quantità:
E = ~p · ~v − L = √
m0 c2
1 − v2 /c2
= m0 c2 γ
(esattamente il valore ottenuto per altra via). Poiché L non dipende esplicitamente
dal tempo, l’energia è una costante del moto (vedi (5.47)). Osserviamo che ~p =
E~v/c2 e che E2 − p2 c2 = m20 c4 . L’hamiltoniana è data da
q
H = c p2 + m20 c2 .
Se v/c 1, H ≈ m0 c2 + p2 /(2m0 ). Possiamo anche enunciare il principio
variazionale con il formalismo quadridimensionale
S = − m0 c
Z b
a
ds = −m0 c
Z bq
a
dx µ
dxµ = −m0 c
Z bq
a
gµν dx µ dx ν .
In maniera analoga a quanto fatto nel Capitolo 2, poniamo
x µ (e) = x µ + eη µ
e
S[ x µ (e)] = −m0 c
Z bq
a
gµν dx µ (e) dx ν (e).
Per una particella libera:
Z b q
q
S[ x (e)] − S[ x ] = −m0 c
gµν dx µ (e) dx ν (e) − gµν dx µ dx ν
a
Z b q
q
(5.48)
µ
µ
µ
ν
ν
ν
= − m0 c
gµν (dx + e dη )(dx + e dη ) − gµν dx dx .
µ
µ
a
100
5.9 meccanica analitica relativistica (cenni)
Sviluppando la funzione integranda in serie di potenze di e intorno a 0 il primo
termine è nullo, per il secondo risulta:
∂q
µ
µ
ν
ν
=
gµν (dx + e dη )(dx + e dη )
∂e
e =0
µ + e dη µ ) dη ν + g (dx ν + e dη ν ) dη µ g
(
dx
1 µν
µν
q
=
=
2
gµν (dx µ + e dη µ )(dx ν + e dη ν )
e =0
gµν dx µ dη ν
gµν (dx µ + e dη µ ) dη ν
p
=
=
= q
gµν dx µ dx ν
gµν (dx µ + e dη µ )(dx ν + e dη ν ) e =0
dx µ dηµ
=
.
ds
Dalla (5.23) abbiamo dx µ = uµ ds, quindi
uµ ds dηµ
dx µ dηµ
=
= uµ dηµ .
ds
ds
Allora la (5.48) diventa
δS = S[ x µ (e)] − S[ x µ ] =
Z b
∂q
µ
µ
ν
ν
= −m0 ce
gµν (dx + e dη )(dx + e dη )
+ O(e2 ) =
a ∂e
e =0
= −m0 ce
Z b
a
uµ dηµ
con la condizione ηµ | a = ηµ |b = 0 affinché il moto sia ammissibile. Poiché,
integrando per parti
Z b
a
µ
u dηµ =
Z b
a
µ
d( u ηµ ) −
Z b
a
µ
du ηµ = −
Z b
a
µ
du ηµ = −
Z b
duµ
a
ds
dsηµ
risulta
δS = m0 ce
Z b
duµ
a
ds
dsηµ .
Ponendo eηµ = δxµ l’equazione precedente può essere scritta nella forma
δS = m0 c
Z b
duµ
a
ds
δxµ ds
e dalla condizione δS = 0 deriva che duµ /ds = 0 (forma covariante del moto di
una particella), cioè la quadriaccelerazione è nulla.
5.9.1 Carica in moto in un campo elettromagnetico
Vogliamo ora scrivere, sempre con il formalismo quadridimensionale, l’azione di
una particella di massa m0 e carica q in un campo elettromagnetico. Abbiamo
101
5.9 meccanica analitica relativistica (cenni)
visto a suo tempo che il potenziale generalizzato del campo elettromagnetico è
dato da
q~
V = qϕ − A
· ~v
c
~ Ora
noti il potenziale scalare ϕ e il potenziale vettore A.
V dt =
q~
q
q
ϕ(c dt) − A
· d~r = Aµ dxµ
c
c
c
~ ) è ipotizzadove xµ è la coordinata covariante di un punto evento e A = ( ϕ, A
to essere un quadrivettore controvariante, il quadripotenziale. Assumiamo che la
carica sia uno scalare di Lorentz. Allora
Z b
q
m0 c ds + Aν dxν ,
c
a
µ
µ
δS = S[ x (e)] − S[ x ] =
Z b
q
q
=−
m0 c dx µ (e) dxµ (e) − m0 c dx µ dxµ +
S=−
a
−
Z
q b
c
a
(5.49)
(5.50)
Aν ( xµ (e)) dxν (e) − Aν ( xµ ) dxν .
Il primo integrale si calcola come visto nel caso della particella libera, per il
secondo integrale abbiamo, sviluppando in serie di potenze di e:
Aν ( xµ (e)) dxν (e) − Aν ( xµ ) dxν = Aν ( x µ + eηµ ) d( xν + eην ) − Aν ( xµ ) dxν =
∂Aν
ν
= e A ( xµ ) dην +
ηµ dxν + O e2 .
∂xµ
Inoltre, con la solita condizione ην | a = ην |b = 0 risulta:
Z b
∂Aν
ν
e
ηµ dxν =
A ( xµ ) dην +
∂xµ
a
Z b
∂Aν
ν
ν
=e
d( A ( xµ )ην ) − dA ( xµ )ην +
ηµ dxν =
∂xµ
a
Z b
∂Aν
ν
− dA ( xµ )ην +
=e
ηµ dxν =
∂xµ
a
Z b
∂Aν
∂Aν
dxµ ην +
ηµ dxν =
=e
−
∂xµ
∂xµ
a
Z b
∂Aµ
∂Aν
=e
−
ηµ dxν +
ηµ dxν .
∂xν
∂xµ
a
102
5.9 meccanica analitica relativistica (cenni)
Nell’ultima uguaglianza abbiamo potuto invertire gli indici µ e ν del primo termine poiché si tratta di una somma su µ e ν. Dunque, ponendo eηµ = δxµ , la (5.50)
diventa
Z b
q ∂Aµ
q ∂Aν
duµ
dsδxµ +
δxµ dxν −
δxµ dxν =
δS =
m0 c
ds
c ∂xν
c ∂xµ
a
Z b
duµ
q ∂Aν
∂Aµ dxν
=
m0 c
−
−
dsδxµ =
ds
c ∂xµ
∂xν
ds
a
Z b
q ∂Aν
∂Aµ
duµ
−
−
=
m0 c
uν dsδxµ .
ds
c ∂xµ
∂xν
a
In definitiva abbiamo
duµ
q
δS = 0 =⇒ m0 c
=
ds
c
∂Aν
∂Aµ
−
∂xµ
∂xν
uν =
q µν
F uν .
c
(5.51)
dove F µν = ∂ Aν /∂xµ − ∂ Aµ /∂xν , detto tensore elettromagnetico, è un quadritensore controvariante di rango 2 antisimmetrico.
La (5.51) rappresenta la forma controvariante della equazione del moto di una
particella di massa m0 e carica q in un campo elettromagnetico. Esplicitando si
vede che
0 − Ex − Ey − Ez
Ex
0
− Bz By
.
F =
Ey Bz
0
− Bx
Ez
− By
Bx
0
Si può dimostrare che E2 − B2 e ~E · ~B sono invarianti per trasformazioni di Lorentz.
Si può altresì far vedere che F è invariante per trasformazioni di gauge. La gauge
di Lorentz è
∂Aµ
= 0.
∂x µ
L’azione (5.49) può essere scritta nel formalismo ordinario:
!
r
Z b
2
v
q
~ · ~v dt.
S=
−m0 c2 1 − 2 − qϕ + A
c
c
a
La funzione sotto il segno di integrale è, naturalmente, la lagrangiana:
r
v2
q~
· ~v.
L = −m0 c2 1 − 2 − qϕ + A
c
c
Il momento generalizzato ~
P è dato da
q~
~P = ∂L = √ m0~v
+ A
= ~p +
∂~v
c
1 − v2 /c2
q~
A
c
103
(5.52)
(5.53)
5.10 *l’interferometro di michelson e morley
~
da cui ~p = ~
P − q A/c.
Ora
H = ~v ·
q ~ 2
∂L
m0 c2
−L= √
+ qϕ =⇒ (H − qϕ)2 = m20 c4 + c2 ~P − A
∂~v
c
1 − v2 /c2
da cui
r
H=
q ~ 2
P− A
m20 c4 + c2 ~
+ qϕ
c
che è l’hamiltoniana di una particella con massa a riposo m0 e carica q in un
~
campo elettromagnetico con potenziale scalare ϕ e potenziale vettore A.
5.10
*l’interferometro di michelson e morley
L’elettromagnetismo prerelativistico superava in modo piuttosto goffo la presenza della costante c nelle equazioni dei campi elettrico e magnetico ipotizzando
l’esistenza di un mezzo, l’etere, che permeasse l’intero universo e rispetto al quale
la luce si muoveva appunto con velocità c. L’etere era pensato come un mezzo del
tutto singolare, sottile e capace di permeare completamente il cosmo, dotato dell’unica proprietà di essere il mezzo attraverso il quale la radiazione si propagava.
Per avere una qualche stima della velocità della Terra rispetto a tale mezzo Albert
Abraham Michelson, singolarmente nel 1881 e poi assieme a Edward Morley nel
1887, mise a punto un esperimento in cui si intendeva rilevare il “vento d’etere”
mediante tecniche interferometriche. Il dispositivo messo a punto dai due sperimentatori è schematizzato in Figura 5.4 ed era montato su una lastra di pietra
fatta galleggiare su mercurio liquido: questo permetteva di mantenere la lastra
orizzontale e di farla girare attorno a un perno centrale.
Supponiamo ora che la Terra si muova rispetto all’etere con velocità v. Il fascio
luminoso che parte dalla sorgente S viene scomposto dallo specchio semiargentato in due raggi normali tra loro; il raggio 1 si propaga verso lo specchio R1 ,
viene da questo riflesso, subisce una deviazione di π/2 a causa dello specchio
semiargentato e perviene al cannocchiale C; il raggio 2 invece si dirige verso lo
specchio R2 e dopo la riflesione attraversa pressocché indisturbato lo specchietto
semiargentato per poi giungere anch’esso nel cannocchiale. Ciò che si dovrebbe
osservare nel cannocchiale è una serie di frange di interferenza dovute al fatto che
il tratto AR1 dovrebbe essere percorso dalla luce in un arco di tempo diverso rispetto al tratto AR2 , a causa della composizione delle velocità che consegue dalla
presenza del mezzo luminifero. La differenza di fase tra i due raggi nel momento
in cui si ricongiungono in A genera l’interferenza.
Il tempo impiegato dal raggio 1 per percorrere AR1 (andata e ritorno) è
T1 =
L1
L
2L
1
+ 1 = 1
.
c+v c−v
c 1 − v2 /c2
(5.54)
Per il raggio 2 bisognerà tener conto del fatto che, nel sistema dell’etere, la luce si
propaga sempre e comunque a velocità c. Dunque la velocità vy con cui viene per-
104
5.10 *l’interferometro di michelson e morley
corsa la distanza deve soddisfare la relazione c2 = v2y + v2 , ovvero vy =
Di conseguenza
T2 = 2
L2
1
L2
=2 √
.
vy
c 1 − v2 /c2
√
c2 − v2 .
(5.55)
La differenza tra i tempi è dunque
L2
L1
2
√
−
.
∆T = T2 − T1 =
c
1 − v2 /c2 1 − v2 /c2
(5.56)
Se ora ruotiamo di π/2 l’intero apparato, la relazione che si trova (essendo i bracci
invertiti) è
2
L2
L1
0
∆T =
−√
.
(5.57)
c 1 − v2 /c2
1 − v2 /c2
Perciò
L1 + L2
∆T − ∆T = 2
c
0
1
1
√
−
1 − v2 /c2 1 − v2 /c2
.
(5.58)
Sviluppando in potenze di v/c e ignorando termini di ordine superiore al secondo,
otteniamo che
∆T 0 − ∆T ≈ v2
L1 + L2
.
c3
(5.59)
Dunque ruotando lo strumento dovrebbe osservarsi uno spostamento di ∆n =
v2 λc L1 c+3 L2 frange attraverso il centro del cannocchiale. Il dispositivo di Michelson
e Morley aveva L1 = L2 = 11 m, mentre la lunghezza d’onda della luce usata
era λ = 5.5 · 10−7 m. All’epoca dell’esperimento si riteneva che il Sole fosse essenzialmente solidale con il riferimento dell’etere, mentre la Terra orbitava con
una velocità di v = 30 000 m/s (che dunque era in modulo proprio la v dell’esperimento esaminato). Si disponeva inoltre di varie stime della velocità della luce
e tutte suggerivano che la luce avesse una velocità c ≈ 3 · 108 m/s. Dunque si
ricava v/c ≈ 10−4 . Da questi dati si ricava uno spostamento teorico di ∆n = 0.4
frange. Nel secondo esperimento Michelson e Morley riuscirono a rendere lo strumento sensibile a uno spostamento di appena 0.01 frange. L’esperimento, nato
per dare una stima di v, fu un fallimento, in quanto non venne osservato alcuno spostamento dell’entità prevista e dunque il “vento d’etere” non fu rilevato.
Ovviamente, alla luce dei risultati di Einstein, questo risultato si spiega immediatamente, poiché la velocità della luce è la medesima in tutte le direzioni in ogni
sistema di riferimento. Lo sfasamento, assunta vera questa ipotesi, non poteva
che essere nullo.
L’esperimento ebbe, soprattutto negli anni seguenti, grande risonanza tra i fisici
in quanto fu una delle prove sperimentali più lucide dell’infondatezza della teoria
dell’etere, perlomeno come elaborata nel secolo XIX. Tuttavia occorre sottolineare
che l’esperimento non è di per sé una prova della teoria di Einstein; in effetti,
come poi si vide con esperimenti analoghi eseguiti con interferometri a bracci
105
5.10 *l’interferometro di michelson e morley
Figura 5.4: Schema dell’interferometro di Michelson e Morley.
disuguali, l’esperimento permetteva di concludere semplicemente che la velocità
della luce lungo percorsi diversi non dipende dalla velocita del sistema inerziale
in esame rispetto a un qualsiasi altro sistema inerziale, e dunque non vi erano
sistemi di riferimento privilegiati. La costanza della velocità della luce di per sé
non è un risultato dell’esperimento in quanto non abbiamo informazioni sulla
differenza di velocità della radiazione tra andata e ritorno. Basti pensare che
si possono ricavare trasformazioni differenti da quelle di Lorentz che spieghino
correttamente l’esperimento.12 L’ipotesi che l’esperimento abbia spinto Einstein a
formulare i suoi postulati nella precisa forma in cui li conosciamo sembra dunque
infondata sia da un punto di vista logico che storico.13 Semmai essa manifestò in
modo quanto mai palese che occorreva necessariamente andare oltre il modello
dell’etere.
12 Si veda a proposito Barone [1, pagine 103–105].
13 Si ricordi il pensiero di Einstein a riguardo:
«L’esito dell’esperimento di Michelson non ebbe una grande influenza sull’evoluzione delle mie idee [...]. La spiegazione di ciò sta nel fatto che ero, per ragioni di carattere generale, fermamente convinto che non esista il moto assoluto, e
il mio unico problema era come ciò potesse conciliarsi con quello che sapevamo
dell’elettrodinamica.»
106
6
INTRODUZIONE ALLA MECCANICA QUANTISTICA
6.1
*il corpo nero
Un corpo nero è un oggetto che assorbe tutta la radiazione elettromagnetica incidente (e quindi non ne riflette). Se introduciamo il concetto di potere assorbente
come la frazione di energia raggiante incidente che viene assorbita dal corpo, si
conclude che un corpo nero è un oggetto che ha potere assorbente 1. Kirchhoff è
riuscito a dimostrare nel 1859 che il potere assorbente di un corpo dipende solo
dalla temperatura del corpo e non dalla sua natura. Kirchhoff stesso, per esempio,
ha provato che un ottimo esempio di corpo nero è un contenitore a temperatura
costante sulle cui pareti è praticato un piccolissimo foro, di modo che la radiazione che entra attraverso di esso abbia probabilità praticamente nulla di uscirvi e
venga assorbita dal corpo in seguito alle numerose riflessioni interne.
Sia dunque u la densità di energia all’interno del contenitore e indichiamo con
uν dν la densità di energia delle componenti che cadono nell’intervallo (ν, ν + dν).
Il risultato di Kirchhoff cui si è accennato può esprimersi nel seguente modo:
fissata ν, uν = uν ( T ). Stefan aveva dimostrato che
U=
Z +∞
0
uν dν = σT 4
(Legge di Stefan)
dove σ = 5.67 · 10−8 W/(m2 · K4 ) è la costante di Stefan-Boltzmann. Ricordando
che la pressione esercitata sulle pareti del corpo è data da p = u/3, consideriamo
una trasformazione termodinamica infinitesima:
δQ = T dS = dU + p dV =
1
4
= V du + u dV + u dV = V du + u dV ⇐⇒
3
3
V du
4u
dS =
dT +
dV.
T dT
3T
Ovvero
∂S
4u
=
∂V
3T
∂S
V du
=
.
∂T
T dT
Imponendo l’uguaglianza delle derivate miste si ottiene
4 1 du
u
1 du
du
u
− 2 =
⇐⇒
=4 .
3 T dT
T
T dT
dT
T
(6.1)
(6.2)
Integrando l’equazione differenziale si ottiene che u = ςT 4 , con ς costante di
integrazione, ovvero
U = σT 4 .
(Legge di Stefan-Boltzmann)
107
6.1 *il corpo nero
Nel 1893 Wien dimostrò che
ν
u ν = ν3 F
T
(Legge dello spostamento)
che contiene la legge di Stefan. Infatti
U=
=
Z +∞
0
Z +∞
0
= T4
ν3 F
T
dν =
pongo α =
ν
T
T 3 α3 F (α) T dα =
Z +∞
0
ν
α3 F (α) dα.
La relazione di Wien si può anche esprimere in funzione delle lunghezze d’onda
λ; infatti, indicata con uλ la densità di energia nell’intervallo di lunghezza d’onda,
richiediamo che uν dν = uλ dλ. Da λν = c, differenziando si ha
|dλ|
|dν|
ν
=
⇐⇒ |dν| = dλ.
λ
ν
λ
Perciò
ν
uλ dλ = uν dν = uν |dλ|
λ
da cui
uλ =
c4 c F
.
λ5
λT
Per trovare tali massimi come solito
c duλ
c 0 c + 5F
= 0.
= 0 ⇐⇒
F
dλ
λT
λT
λT
Poiché F è una funzione universale, detta λ̄ la soluzione, dalla forma dell’equazione abbiamo che
λ̄T = costante = b.
Pertanto λ̄ = b/T, ovvero all’aumentare della temperatura, il massimo della
funzione si sposta verso lunghezze d’onda più piccole (legge dello spostamento di
Wien).1
ν
Nel 1896 Wien stesso propone una forma possibile di F: Fν ( T ) = a1 e−a2 T .
Si mostra mediante analisi di Fourier che il campo elettromagnetico si comporta
come se fosse generato da molti oscillatori armonici indipendenti. Noto il numero
N di oscillatori di una determinata frequenza si può ricavare uν ; si prova che la
densità di oscillatori armonici fra ν e ν + dν è:
dN (ν)
8π
= 3 ν2 dν.
V
c
1 La costante b = 2.897 768 5 · 10−3 m · K prende il nome di costante dello spostamento di Wien.
108
6.1 *il corpo nero
0.6
5000 K
0.5
Teoria classica (5000 K)
uλ (MJ/m4 )
0.4
0.3
0.2
4000 K
0.1
0
3000 K
0
0.5
1
1.5
2
2.5
3
λ (µm)
Figura 6.1: Curve di Planck per diversi valori della temperatura a confronto con i risultati
previsti dalla teoria classica di Rayleigh-Jeans. Sulle ordinate è riportata la
densità di energia per unità di volume per unità di lunghezza d’onda, quindi
l’integrale delle curve rappresenta la densità volumetrica di energia.
Nota l’energia media dei detti oscillatori ū, allora uν dν = ū dN (ν)/V.
Poiché vale il principio di equipartizione dell’energia e per ogni oscillatore,
avendo esso due modi possibili, ū = 2(k B T/2) = k B T, ricorrendo alla distribuzione di Boltzmann si ha:
P(u) = ce
− k uT
B
e
= R +∞
0
− k uT
e
B
− k uT
B
du
,
R +∞ − u
dove c = 1/ 0 e k B T du è una costante che soddisfa la condizione di norR +∞
malizzazione 0 P(u) du = 1. Pertanto il valore medio può essere ottenuto
da
R +∞ − u
Z +∞
ue k B T du
ū =
uP(u) du = R0 +∞ − u
= k B T.
0
e k B T du
0
Perciò
uν ( T ) dν = ū
dN (ν)
8π
= k B T 3 ν2 dν.
V
c
(Relazione di Rayleigh-Jeans)
Si vede subito che integrando tra 0 e +∞ l’integrale diverge (poiché tale fatto è
legato al contributo delle alte frequenze si parla di catastrofe ultravioletta o catastrofe
di Rayleigh-Jeans). La relazione è ottenuta ammettendo che gli scambi energetici
avvengano con continuità.
109
6.2 l’effetto fotoelettrico
Nel 1901 Planck propose invece che l’energia potesse essere scambiata solo secondo quantità multiple di hν. In questo caso, detto un = nhν l’energia scambiata,
P(un ) = ce
−
− knhνT
B
=
e
− knhνT
∑∞
n =0 e
B
−n khνT
B
= (1 − e
− khνT
B
)e
−n khνT
B
,
hν
dove c = 1 − e k B T è una costante che soddisfa la condizione di normalizzazione
∑0+∞ P(un ) = 1. Dunque
ū =
∞
∑ un P(un ) = hν(1 − e
− khνT
n =0
B
)
∞
∑ ne
n =0
−n khνT
B
=
hν
e
hν
kB T
−1
ovvero
uν =
h
8π 3
ν hν
.
3
c
e kB T − 1
(Legge della radiazione di Planck)
La legge di Planck è perfettamente in accordo con i dati sperimentali, elimina
il problema della “catastrofe ultravioletta” e restituisce la legge di Rayleigh-Jeans
come primo termine dello sviluppo in serie (si veda la Figura 6.1).
6.2
l’effetto fotoelettrico
L’esperienza mostra che, in certe condizioni, un metallo colpito da un fascio di
luce monocromatica emette elettroni. L’apparato sperimentale può essere, grosso
modo, schematizzato come segue: all’interno di un involucro trasparente, in cui
è praticato il vuoto, è posto un catodo su cui è fatta incidere radiazione elettromagnetica monocromatica (nello spettro del visibile o superiore) e un anodo che
raccoglie i fotoelettroni emessi dal catodo. L’anodo si trova, rispetto al catodo,
a un potenziale inferiore, il cui valore può essere variato mediante un potenziometro (si veda Figura 6.2). Gli aspetti rilevanti dell’effetto fotoelettrico possono
essere così riassunti:
Figura 6.2: Apparato per la rivelazione dell’effetto fotoelettrico.
110
6.2 l’effetto fotoelettrico
1. esiste, in funzione del tipo di metallo di cui è costituito il catodo, una frequenza di soglia ν0 della radiazione incidente, al di sotto della quale non
si verifica nessuna emissione di fotoelettroni, qualunque sia l’intensità della
radiazione;
2. esiste un potenziale d’arresto V0 , indipendente dall’intensità della radiazione incidente, in corrispondenza del quale nessun elettrone raggiunge l’anodo; questa proprietà sta a significare che l’energia cinetica massima dei
fotoelettroni appena emessi dal catodo verifica l’equazione Tmax = eV0 dove
e è la carica dell’elettrone in modulo;
3. l’emissione dei fotoelettroni è istantanea qualunque sia l’intensità della radiazione, purché ν > ν0 ;
4. la corrente fotoelettrica i, ovvero il numero di elettroni emessi nell’unità di
tempo, dipende dall’intensità I della radiazione incidente.
La teoria classica della radiazione prevede
a. l’esistenza di una intensità di radiazione di soglia I0 al di sotto della quale
l’effetto non avviene, in contrasto col punto 1;
b. la dipendenza di Tmax , e quindi del potenziale d’arresto V0 , dall’intensità
della radiazione I in contrasto col punto 2;
c. che l’emissione debba avvenire dopo che un elettrone ha assorbito, a spese
della radiazione incidente, abbastanza energia da superare il potenziale, detto di estrazione, che, in condizioni normali impedisce all’elettrone di uscire
dal metallo: per tale ragione l’emissione può verificarsi solo dopo un certo
intervallo di tempo dall’arrivo della radiazione incidente, intervallo ovviamente tanto maggiore quanto più bassa è l’intensità I, in contrasto col punto
3;
d. che la corrente, dovuta ai fotoelettroni, debba aumentare al crescere di I, in
accordo col punto 4 (sempre che ν > ν0 ).
Allora, almeno tre delle caratteristiche principali dell’effetto fotoelettrico non sono
spiegabili mediante la teoria classica della radiazione. Nel 1905 Einstein propose una spiegazione dell’effetto assumendo che la radiazione fosse costituita da
pacchetti, o quanti di energia, detti fotoni: una radiazione elettromagnetica monocromatica di frequenza ν consiste di fotoni di energia hν, dove h = 6.6 · 10−34 J · s
è la costante di Planck. Abbiamo visto che, per spiegare l’emissione del corpo
nero, Planck aveva ipotizzato un simile comportamento per l’energia della radiazione elettromagnetica all’interno di una cavità. Vediamo ora come, con l’ipotesi
di Einstein, è possibile fornire una spiegazione esauriente dell’effetto.
Possiamo assumere, per semplicità, che l’elettrone sia a riposo all’interno del
metallo.2 Un elettrone, dopo aver assorbito un fotone di energia hν, è emesso
2 Osserviamo che l’energia termica è circa 10−2 eV mentre i fotoni, nel visibile e nell’ultravioletto,
hanno un’energia di circa 1 − 10 eV.
111
6.3 effetto compton
Figura 6.3: Effetto Compton
dal catodo con un’energia cinetica T = hν − W, dove W è il lavoro di estrazione
dal metallo. Se W0 è il lavoro minimo di estrazione caratteristico del metallo
(per esempio: per il sodio è 2.7 eV, per il ferro 3.2 eV), l’energia cinetica massima
dell’elettrone (quando questo è emesso dal catodo) è data da Tmax = hν − W0 .
Esiste di conseguenza una frequenza di soglia ν0 = W0 /h tale che, se ν < ν0 ,
l’effetto non ha luogo. Vi è altresì un valore V0 del potenziale in corrispondenza
del quale anche gli elettroni più veloci non sono in grado di raggiungere l’anodo.
Abbiamo in particolare V0 = (hν − W0 )/e. Dopo che un elettrone ha acquistato,
mediante assorbimento di un fotone, energia pari ad hν, la sua emissione dal
metallo, se ν > ν0 , è immediata (il ritardo è inferiore a 10−9 s) e non dipende
dall’intensità della radiazione. Se l’effetto ha luogo, all’aumentare dell’intensità di
radiazione cresce anche il numero di fotoelettroni e quindi la corrente nel circuito.
In conclusione, possiamo dire che l’effetto fotoelettrico, al pari della radiazione
del corpo nero, fornisce una prova che la radiazione elettromagnetica di frequenza
ν è costituita da fotoni di frequenza hν.
Esercizio
Dimostrare che un elettrone libero non può assorbire un fotone di energia hν in
base alla conservazione del quadrimomento.
6.3
effetto compton
Se facciamo incidere un fascio di raggi X con λ0 = 0.7 Å ( =⇒ hν0 = hc/λ0 =
18 keV) su una sostanza (come per esempio il molibdeno) si osserva, sperimentalmente, che i raggi X diffusi a un angolo θ rispetto alla direzione della radiazione
incidente hanno lunghezza d’onda lievemente maggiore di λ0 ; in particolare si
trova
∆λ =
h
(1 − cos θ )
me c
dove me è la massa a riposo dell’elettrone.3 La grandezza h/(me c) ha (ovviamente)
le dimensioni di una lunghezza e vale 0.024 Å: è detta lunghezza d’onda Compton
3 Ricordiamo che la massa a riposo di un elettrone è pari a me = 9.11 · 10−31 kg = 0.511 MeV/c2
112
6.4 onde di materia di de broglie
dell’elettrone. Questo effetto (di diffusione), detto Compton, può essere spiegato
come un urto tra un fotone di energia hν0 e momento hν0 /c e un elettrone libero,
che possiamo considerare fermo (notiamo che l’energia di legame degli elettroni
periferici è di qualche eV, mentre l’energia dei fotoni è molto maggiore). Nell’urto
fotone-elettrone si conserva il quadrimomento. Chiamiamo ~p0 e ~p i momenti
fotonici prima e dopo l’urto e ~pe il momento dell’elettrone dopo l’urto; ricordiamo
che, prima dell’urto, l’elettrone è fermo. Dalla conservazione dell’energia:
q
me c2 + cp0 = m2e c4 + c2 p2e + cp.
(6.3)
Dalla conservazione del momento:
~p0 = ~p + ~pe ⇐⇒ ~pe = ~p0 − ~p ⇐⇒ p2e = p20 + p2 − 2p0 p cos θ.
(6.4)
La (6.3) può anche scriversi come:
(me c2 + cp0 − cp)2 = m2e c4 + c2 p2e ⇐⇒
4
4
m2e
c
+ c2 p20 + c2 p2 + 2me c3 ( p0 − p) − 2c2 pp0 = m2e
c
+ c2 p2e .
(6.5)
Sostituendo nella (6.5) la (6.4) otteniamo:
c2 p20 + c2 p2 + 2me c3 ( p0 − p) − 2c2 p0 p = c2 p20 + c2 p2 − 2c2 p0 p cos θ =⇒
me c( p0 − p) = p0 p(1 − cos θ ).
(6.6)
Ora, p0 = hν0 /c = h/λ0 , mentre p = hν/c = h/λ, perciò la precedente diventa
1
h2
1
−
=
(1 − cos θ ) =⇒
me ch
λ0
λ
λ0 λ
h
λ − λ0 =
(1 − cos θ ).
(6.7)
me c
In conclusione, nell’effetto Compton i fotoni si comportano proprio come dei corpuscoli cui compete energia hν e momento hν/c. La diffusione Compton può
essere considerata come un assorbimento di radiazione elettromagnetica seguito
da emissione, mentre l’effetto fotoelettrico è un assorbimento puro e semplice.
6.4
onde di materia di de broglie
La radiazione elettromagnetica ha manifestazioni ondulatorie e presenta, nel contempo, comportamenti corpuscolari come nella radiazione del corpo nero, nell’effetto fotoelettrico e nell’effetto Compton. Il legame tra questi due aspetti è
rappresentato dalla costante di Planck h. Sappiamo infatti che, se ν è la frequenza
di un’onda elettromagnetica monocromatica, questa può essere pensata in certi contesti come formata da quanti, fotoni (particelle di massa nulla), a ognuno
dei quali compete un’energia hν e un momento hν/c. Poiché h interviene anche nella condizione di quantizzazione di Bohr-Sommerfeld, Louis de Broglie nel
1923 si chiese se non fosse possibile, per così dire, un percorso inverso, cioè che
113
6.4 onde di materia di de broglie
oggetti (come gli elettroni) pensati sempre come particelle potessero presentare,
in particolari situazioni, un comportamento ondulatorio. Consideriamo nel modello atomico di Bohr un elettrone in orbita attorno al nucleo; la condizione di
quantizzazione è la seguente:
I
p dq = nh
n ∈ N.
Ora, se l è la lunghezza dell’orbita, la precedente relazione può anche essere
scritta:
l p = nh ⇐⇒ l =
nh
.
p
Qui il termine h/p ricorda la lunghezza d’onda λ di un fotone. Questa analogia
ha suggerito a de Broglie la seguente ipotesi: a ogni particella, avente massa a riposo
non nulla, è associata un’onda, la cui lunghezza d’onda, noto il momento p, è data da
λ = h/p.
Alla luce di questa ipotesi, le orbite permesse nella teoria di Bohr sono quelle
che contengono un numero intero di lunghezze d’onda. Vediamo con quali lunghezze d’onda abbiamo a che fare nello schema di de Broglie. Prendiamo delle
particelle libere (non relativistiche):
λ=
h
h
=√
.
p
2mE
(6.8)
Questa è la lunghezza d’onda di de Broglie di una particella di massa m avente
un’energia cinetica E.
Nel caso di un elettrone, se E = 1 eV,
λ= √
h
2mE
=√
6.626
2 · 9.11 · 10−31
· 1.6 · 10−19
m = 1.24 · 10−9 m = 12.4 Å
(come nei raggi X), pari alle dimensioni atomiche. Per un oggetto di 1 kg ed energia di 1 J gli effetti quantistici si avrebbero a distanze pari a 10−34 m, del tutto
trascurabili rispetto alle oscillazioni termiche degli atomi. Notiamo che, mentre
per i fotoni λ è inversamente proporzionale
a E, per le particelle (non relativisti√
che) λ è inversamente proporzionale a E. Inoltre maggiore è la massa, minore è,
a parità di energia, la lunghezza d’onda. Nel 1927 Davisson e Germer hanno provato che gli elettroni presentano effettivamente un comportamento ondulatorio e
sono caratterizzati da una lunghezza d’onda data proprio dalla (6.8). Analoghi
comportamenti ondulatori sono, poi, stati provati per protoni, neutroni, atomi di
He, ecc. Stabilito il carattere ondulatorio delle particelle materiali, bisogna vedere
a quale grandezza fisica si riferisce il fenomeno, cioè quale sia il significato fisico
della grandezza o delle grandezze oscillanti che chiamiamo funzioni d’onda e per
la quale ipotizziamo un’equazione lineare in analogia con le onde meccaniche e
quelle elettromagnetiche.
Normalmente quando si è in presenza di una propagazione ondulatoria, si
pone il problema di quale sia il mezzo che porta l’onda e quale la grandezza
114
6.4 onde di materia di de broglie
che ne misuri l’ampiezza. Nel caso elettromagnetico alla prima domanda non
c’è risposta, o meglio è il vuoto, mentre le grandezze che misurano l’ampiezza
sono il campo elettrico e il campo magnetico. Ci chiediamo nel caso delle onde di
materia di de Broglie chi sostituisce questi campi (assodato che esse si propagano
nel vuoto). L’esperimento di Davisson e Germer fornisce una risposta a questo
quesito. Nell’esperimento, mediante rivelatori, viene testata la presenza o meno
di elettroni a un particolare angolo. Alla fine, pensando di ripetere più volte
le misure, ogni volta con un solo elettrone nel fascio, viene di fatto misurata
la frequenza con cui l’elettrone è rivelato ai diversi angoli, cioè è misurata una
probabilità di presenza dell’elettrone.
Le idee di de Broglie sulle onde di materia avranno uno sviluppo fondamentale
con la Meccanica Ondulatoria di Schrödinger.
115
RIFERIMENTI BIBLIOGRAFICI DELLA PARTE II
[1]
Vincenzo Barone. Relatività. Principi e applicazioni. Torino: Bollati Boringhieri,
2007. (Citato a pagina 106).
[2]
Max Born. Fisica atomica. Torino: Bollati Boringhieri, 1976.
[3]
David Halliday, Robert Resnick e Jearl Walker. Fondamenti di fisica. Fisica
moderna. Milano: CEA, 2002.
[4]
Charles Kittel, Walter D. Knight e Malvin A. Ruderman. Meccanica. Volume 1.
La fisica di Berkley. Bologna: Zanichelli, 1970. (Citato a pagina 93).
[5]
Kenneth S. Krane. Modern Physics. John Wiley & Sons, 1995.
[6]
Lev Davidovič Landau e Evgenij Mikhailovič Lifšits. Teoria dei campi.
Volume 2. Fisica teorica. Roma: Editori Riuniti, 2004.
[7]
Luigi Picasso. Lezioni di meccanica quantistica. Pisa: Edizioni ETS, 2000.
[8]
Robert Resnick. Introduzione alla relatività ristretta. Milano: Casa Editrice
Ambrosiana, 1996.
[9]
Eyvind H. Wichmann. Fisica quantistica. Volume 4. La fisica di Berkley.
Bologna: Zanichelli, 1973.
116
Parte III
APPENDICI
A
LA TRASFORMATA DI LEGENDRE
a.1
definizione
Sia data una funzione f : R → R, liscia e convessa ( f 00 ( x ) > 0 ∀ x ∈ R). La sua
trasformata di Legendre è una funzione g di una nuova variabile p data da
g( p) = max{ px − f ( x )}.
(A.1)
x
Il significato geometrico della trasformata può essere inteso nel modo seguente.
Consideriamo nel piano xy il grafico della funzione f ( x ) e sia data la retta y = px
passante per l’origine con p inteso fissato. Allora è possibile individuare un punto
x̃ = x̃ ( p) tale che px − f ( x ) = F ( p, x ) sia massima. La trasformata di Legendre è
dunque F ( p, x̃ ( p)) = g( p). Se esiste, il punto x̃ ( p) è univocamente determinato,
essendo individuato dalla condizione ∂F/∂x = p − f 0 ( x̃ ) = 0 (grazie al teorema
del Dini è possibile esprimere x̃ in funzione di p), cioè
f 0 ( x̃ ) = p.
(A.2)
Questa condizione ha senso solo se p appartiene al codominio della derivata di
f ( x ). Il punto stazionario così trovato è un massimo in quanto per ipotesi
∂2 F ( x, p) = − f 00 ( x̃ ) < 0.
∂x2 x= x̃
y
y = f (x)
y = px
g( p)
x
x ( p)
Figura A.1: Trasformata di Legendre.
118
A.1 definizione
In base a quanto visto finora la (A.1) può essere anche scritta nel seguente modo:
g( p) = x̃ ( p) p − f ( x̃ ( p)).
La trasformata di Legendre gode di una proprietà molto importante: essa è involutiva, ovvero se g( p) è la trasformata di Legendre di f ( x ), allora la trasformata
di Legendre di g( p) è ancora f ( x ). Le due funzioni f e g si dicono dunque duali
secondo Young. Inoltre essendo per definizione px − f ( x ) ≤ g( p) allora vale la
cosiddetta disuguaglianza di Young:
px ≤ f ( x ) + g( p).
(A.3)
Le precedenti considerazioni si generalizzano facilmente al caso di funzioni a
più variabili. Sia f : Rn → R una funzione liscia e x, p ∈ Rn . Anche in questo
caso
la funzione deve essere convessa, cioè si richiede che la matrice hessiana
sia definita positiva. La trasformata di Legendre è
∂2 f
∂xi ∂x j
g( p) = max{( p, x) − f ( x)},
x
dove
( p, x) =
n
∑ pi xi .
i =1
Allora deve risultare
∂f
( x ) = pi
∂xi
i = 1, . . . , n
(A.4)
o, equivalentemente,
∇ f ( x) = p.
Quindi
x̃ = x̃( p)
e la trasformata si può anche scrivere come
g( p) =
n
∑ x̃i ( p) pi − f (x̃( p)).
(A.5)
i =1
Come abbiamo visto,1 la trasformazione di Legendre permette di passare dalla lagrangiana L(q, q̇, t) (intesa come funzione delle variabili q̇) all’hamiltoniana
1 Si veda pagina 47. Nel caso dell’applicazione della trasformazione di Legendre alla fuzione L le
ipotesi di convessità sono in genere soddisfatte. La lagrangiana di un sistema fisico ha infatti
solitamente la forma L = 21 ∑i mi q̇2i − V (q): evidentemente la matrice
!
∂2 L
= (mi δij )
∂q̇i ∂q̇ j
è definita positiva.
119
A.1 definizione
H(q, p, t). La trasformazione di Legendre trova applicazione in svariati ambiti
della Fisica (per esempio, in termodinamica la funzione entalpia è definita come
trasformata di Legendre della funzione energia rispetto al volume).
La trasformazione di Legendre non è un semplice cambiamento di variabili:
essa consente di passare da funzioni definite su uno spazio lineare a funzioni
definite sul corrispondente spazio duale.
Esercizi
1. Si consideri la funzione f : R → R definita da f ( x ) = x2 . Determinare la
trasformata di Legendre della funzione.
Soluzione. Osserviamo che f 00 ( x ) = 2 > 0
ne (A.2):
f 0 ( x ) = p =⇒ 2x = p =⇒ x =
∀ x ∈ R. Imponiamo la condizio-
p
,
2
p ∈ R.
La trasformata è dunque:
g( p) = x ( p) p − f ( x ( p)) =
p2
p2
p2
−
= .
2
4
4
2. Calcolare la trasformata di Legendre della funzione f : R → R definita da
f ( x ) = x2 /4.
Soluzione. Abbiamo f 00 ( x ) = 1/2 > 0
(A.2) abbiamo:
f 0 (x) =
∀ x ∈ R. Imponendo la condizione
x
= p =⇒ x ( p) = 2p
2
da cui otteniamo che la trasformata di Legendre della funzione è
g( p) = x ( p) p − f ( x ( p)) = 2p2 − p2 = p2 .
In questi due esercizi possiamo ossservare la proprietà di involuzione della
trasformazione di Legendre: la trasformata della trasformata della funzione
f ( x ) = x2 è proprio la funzione stessa.
3. Sia f : R+ → R+ la funzione definita da f ( x ) = x α /α, con α > 1 ( f 00 ( x ) > 0).
Trovare la trasformata di Legendre di f ( x ).
Soluzione. Dalla (A.2) abbiamo:
1
f 0 ( x ) = p ⇐⇒ x α−1 = p ⇐⇒ x = p α−1 .
Allora
1
g( p) = x ( p) p − f ( x ( p)) = p α−1 p −
120
α
p α −1
α−1 α
=
p α −1 .
α
α
A.1 definizione
È tradizione porre
α
α−1
1
1
1
= β ⇐⇒
=
⇐⇒ + = 1
α−1
α
β
α β
per cui
g( p) =
pβ
.
β
In questo caso la disuguaglianza di Young è
xp ≤
xα
pβ
+ .
α
β
4. Data la funzione f : R → R definita da f ( x ) = ex calcolarne la trasformata
di Legendre.
Soluzione. La funzione è convessa. Come al solito imponiamo la condizione
(A.2):
f 0 ( x ) = p ⇐⇒ ex = p ⇐⇒ x ( p) = ln p
p ∈ R+ .
Quindi la trasformata di Legendre della funzione è
g( p) = x ( p) p − f ( x ( p)) = p ln p − p.
Notiamo che
g0 ( p) = ln p = x ( p)
1
g00 ( p) = = x 0 ( p) > 0.
p
Questo è un risultato di carattere generale: la trasformata di Legendre
trasforma funzioni convesse in funzioni convesse.
5. Si consideri la funzione f : R2 → R definita da f ( x1 , x2 ) = 2x12 − 2x1 x2 +
x2 = x12 + ( x1 − x2 )2 . Determinare la trasformata di Legendre di f ( x1 , x2 ).
Soluzione. Dalla (A.4) abbiamo:
∂f
∂x = 4x1 − 2x2 = p1
1
⇐⇒
∂
f
= 2x2 − 2x1 = p2
∂x2
p1 + p2
x1 ( p1 , p2 ) =
2
.
p
+
2p2
1
x2 ( p1 , p2 ) =
2
Allora per la (A.5) la trasformata di Legendre di f ( x1 , x2 ) è
g( p) = x1 ( p1 , p2 ) p1 + x2 ( p1 , p2 ) p2 − f ( x1 ( p1 , p2 ), x2 ( p1 , p2 )) =
p1 + p2
p1 + 2p2
p1 + p2 2
p1 + p2
=
p1 +
p2 −
−
+
2
2
2
2
2
p2 + 2p1 p2 + 2p22
p1 + 2p2
−
= 1
.
2
4
121
B
LA SUCCESSIONE DI FIBONACCI
La successione di Fibonacci (sequenza A000045 della On-Line Encyclopedia of Integer Sequences), descritta dal matematico pisano Leonardo Fibonacci (1170 - 1250)
nell’opera Liber abaci del 1202, è una successione di numeri interi definita per
ricorrenza da
Fn = Fn−1 + Fn−2
F =0
0
F1 = 1
Oltreché per ricorrenza, la successione di Fibonacci può essere espressa in forma
chiusa, cioè con una formula che, dato n, fornisca il valore di Fn senza dover
calcolare tutti i precedenti n − 1 numeri della successione. Per determinare tale
formula bisogna risolvere un problema alle differenze finite. Si cercano soluzioni
del tipo Fn = µn , con µ 6= 0. Dalla definizione della successione abbiamo:
µn = µn−1 + µn−2 ⇐⇒ µ2 = µ + 1
da cui si ricava
µ1,2
√
1± 5
=
.
2
La soluzione sarà una combinazione lineare delle due radici:
Fn = aµ1 + bµ2 .
(B.1)
Imponendo le “condizioni iniziali” si ha:
a = −b
a+b = 0
⇐⇒
b =
aµ1 + bµ2 = 1
1
µ2 − µ1
1
a = √
5
⇐⇒
1
b = − √
5
Sostituendo nella (B.1) otteniamo
√ !n
√ !n !
1
1+ 5
1− 5
Fn = √
−
.
2
2
5
La relazione trovata è nota con il nome di formula di Binet.
122
C
NOTE SULLE UNITÀ DI MISURA
Nel sistema internazionale (SI) l’unità di misura dell’energia è il joule (simbolo J):
1 J = 1 kg · m2 /s2 .
Nel sistema di Gauss (SG o CGS) l’unità di misura è l’erg:
1 erg = 1 g · cm2 /s2 .
Ovviamente 1 J = 107 erg.
Altra unità di misura, usata in chimica e in termodinamica, è la caloria (cal),
insieme al suo multiplo, la chilocaloria (kcal):
1 kcal = 4.184 · 103 J.
In diversi settori della Fisica l’unità di misura usata è l’elettronvolt (eV); ricordiamo che 1 eV è l’energia di un elettrone sottoposto a una differenza di potenziale
di 1 V. Dunque, con riferimento alla tabella seguente:
1 eV = 1.6 · 10−19 J = 1.6 · 10−12 erg
e inversamente
1 J = 0.625 · 1019 eV.
Multipli dell’elettronvolt sono:
1 keV = 103 eV
1 MeV = 106 eV
1 GeV = 109 eV
1 TeV = 1012 eV.
Poiché m0 c2 ha le dimensioni di un’energia, la massa a riposo può essere misurata
in eV/c2 . In Fisica atomica si usa spesso come unità di massa l’unità di massa
atomica (uma), definita come la dodicesima parte della massa del 12 C:
1 uma = 1.661 · 10−27 kg = 931.5 MeV/c2 .
123
D
COSTANTI FISICHE FONDAMENTALI
Riportiamo di seguito alcune costanti fisiche fondamentali, alcune delle quali sono
di interesse per la trattazione corrente. Le grandezze sono riportate in unità SI.
Nome della costante
Velocità della luce (valore esatto)
Costante di Planck
Costante di Boltzmann
Costante di Stefan-Boltzmann
Costante di gravitazione universale
Carica dell’elettrone
Massa a riposo dell’elettrone
Massa a riposo del protone
Massa a riposo del neutrone
Massa a riposo del muone
Raggio di Bohr
Costante di Rydberg
Permeabilità del vuoto
Permittività del vuoto
Magnetone di Bohr
Costante di struttura fine
Costante di Avagadro
Costante di Faraday
Costante molare dei gas
Simbolo
c
h
kB
2π 5 k4B
σ=
15h3 c2
G
−e
me
mp
mn
mµ
4πe0 h̄2
a0 =
m e e2
m e e4
R= 2 3
8e0 h c
µ0
e0
e}
µB =
2me
e2
α=
4πe0 }c
NA
F = eNA
R = k B NA
124
Valore
299 792 458 m/s
6.626 089 6 · 10−34 J · s
1.380 650 5 · 10−23 J/K
5.670 40 · 10−8 W/(m2 · K4 )
6.674 · 10−23 m3 /(kg · s)
−1.602 176 487 · 10−19 C
9.11 · 10−31 kg = 0.511 MeV/c2
1.672 · 10−27 kg = 938.3 MeV/c2
1.675 · 10−27 kg = 939.6 MeV/c2
107 MeV/c2
5.292 · 10−11 m
1.0974 · 107 /m
1.256 637 061 44 · 10−6 N/A2
8.854 187 817 · 10−12 F/m
9.274 015 4 · 10−24 J/T
7.297 353 1 · 10−3
6.022 136 7 · 1023 /mol
96 485 C/mol
8.314 51 J/(K · mol)
INDICE ANALITICO
calcolo delle variazioni, 15
applicazioni del, 19
equazioni di Eulero-Lagrange, 18
lemma fondamentale del, 18
canonica, trasformazione, 61
canoniche
equazioni di Hamilton, 48
variabili, 47
catastrofe ultravioletta, 109
centro
di forza, 29, 30
di massa, ix, 28, 29
ciclica
coordinata, 25
problema di Keplero, 30
cinetica, energia
classica
di un sistema di particelle, x
di una particella, vi
relativistica, 95
teorema della, x
Compton, effetto, 113
configurazioni, spazio delle, 15
trasformazioni puntuali, 60
cono luce, 83
cono del futuro, 83
cono del passato, 83
conservazione
del momento angolare, vi
dell’energia meccanica, xi
della quantità di moto
relativistica, 100
leggi di, 24
controvariante, 88
coordinate
canoniche, 48
cicliche, 24
controvarianti, 88
covarianti, 89
lagrangiane, 3
angolare, momento
conservazione, vi, 25
meccanico, vi
parentesi di Poisson, 60
problema delle forze centrali, 29
relativistico, 97
simmetria sferica, 29
tensore, 97
totale, x
variabile azione, 72
velocità areolare, 30
angolo
variabile, 72
anolonomo, vincolo, 2
areolare, velocità, 30
attrito
vincoli scabri, 3
autovalori
di una matrice rispetto a un’altra,
39
piccole oscillazioni, 39, 43
azione
e reazione
forma debole, ix, 28
forma forte, x, 28
funzionale, 16
integrale sull’orbita, 72
oscillatore armonico unidimensionale, 73
variabile, 72
Bertrand, teorema di, 32
Bohr
atomo di, 114
condizione di quantizzazione di
Bohr-Sommerfeld, 113
Boltzmann
costante di Stefan-Boltzmann, 107
distribuzione di, 109
legge di Stefan-Boltzmann, 108
brachistocrona, 21
125
Indice analitico
equivalenza massa-energia, 95
conservazione, vi
forze centrali, 30
densità di, 107
funzione, 26
conservazione, 26
in un campo centrale, 30
meccanica, principio di conservazione, xi
potenziale, vi
principio di equipartizione, 109
relativistica, 95, 100
relazione di Planck-Einstein, 96
equazione del moto
di Minkowski, 98
particella carica in campo elettromagnetico, 103
equilibrio, 4
forze generalizzate, 5
instabile, 37
piccole oscillazioni, 37
stabile, 37
etere, 77, 104
eV, definizione, 123
evento, 77
normali, 41
polari, 29
principali, 41
corpo nero, 107
legge dello spostamento di Wien,
108
legge di Planck, 110
legge di Stefan-Boltzmann, 108
relazione di Rayleigh-Jeans, 109
Coulomb
gauge di, 26
covariante
equazione, 97
formulazione, 92
hamiltoniana, 100
quadrivettore, 89
d’Alembert, principio di, 5
Davisson e Germer, esperimento di,
115
de Broglie, 113
onde di materia di, 115
relazione di, 114
diagonalizzazione, 39
diffusione
Compton, 113
dilatazione dei tempi, 86
dissipazione, funzione di
di Rayleigh, 11
forza, v
attiva, 5
centrale, vi, 29
centro di, 29
conservativa, vi
di Lorentz, 9
generalizzata, 4
legge dell’inverso del quadrato, 32
lineare di richiamo, 32
momento di una, vi
non derivabile da un potenziale,
10
vincolare, 2
fotoelettrico, effetto, 110
fotone, 96
frequenza
di soglia, 111
modo normale, 41
funzione
Einstein, 105, 106
notazione di, 88
relazione di, 96
elettromagnetico
campo
lagrangiana, 10
lagrangiana covariante, 100
tensore, 103
ellisse
eccentricità della, 34
equazione in coordinate polari della, 34
parametro della, 34
energia
a riposo, 95
126
Indice analitico
per traslazioni, 25
caratteristica di Hamilton, 72
generatrice, 62
funzione principale di Hamilton, 70
mista, 65
parentesi di Poisson, 66
variabili angolo-azione, 72
Jacobi, identità di, 59
Keplero
prima legge di, 36
problema di, 33
seconda legge di, 30
terza legge di, 36
Kirchhoff, 107
Galileo
principio di, 77
trasformazioni di, 77, 81, 85
gauge
di Coulomb, 26
di Lorentz, 103
trasformazioni di, 12
generalizzata
coordinata, 3
forza, 4
generalizzato
potenziale, 9
gradi di libertà, 3, 11
N particelle, 3
piccole oscillazioni, 37
Lagrange
equazioni di, 6
derivazione dal principio di Hamilton, 17
forze non derivabili da un potenziale, 11
lagrangiana, 6
campo elettromagnetico, 12
potenziali generalizzati, 7
Laplace-Runge-Lenz, vettore di, 33
Legendre, trasformazione di, 47, 118
Levi-Civita, eijk simbolo di, 60
liscio, vincolo, 3
Lorentz
forza di, 9
gauge di, 103
scalare di, 91
trasformazioni di, 78, 81
lunghezza propria, 86
Hamilton
equazioni di, 48
notazione simplettica, 54
funzione caratteristica di, 72
funzione principale di, 70
principio variazionale di, 16
principio variazionale modificato,
57
Hamilton-Jacobi, equazione di, 70
hamiltoniana
covariante, 100
notazione simplettica, 53
particella carica in campo elettromagnetico, 104
Hooke, legge di, 32
massa ridotta, 28
matrice
autovalori, 39
definita positiva, 38
diagonale, 40
identità, 39
ortogonale, 40
piccole oscillazioni
energia cinetica, 38
energia potenziale, 38
simmetrica, 38
simplettica standard, 54
Maxwell, equazioni di, 77
Michelson e Morley, esperimento di,
77, 105
identica, trasformazione, 64
inerzia, principio di, 78
invarianza
di Lorentz, 81, 84, 98
parentesi di Poisson, 66
per rotazioni, 25
127
Indice analitico
di estrazione, 111
energia, 6
generalizzato, 7, 9
elettromagnetico, 9
scalare ϕ, 9
vettoriale A, 9
potere assorbente, 107
prodotto scalare
nello spazio di Minkowski, 89, 91
punto materiale, v
minima azione
principio di, 18
Minkowski
diagramma di, 83
equazione di, 98
spazio di, 88
modo normale, 41
momento
angolare, vi
totale, x
canonico, o coniugato, 24
generalizzato, 25
torcente, vi
monogenico, sistema, 15
quadritensore
p volte controvariante e q volte
covariante, 91
completamente controvariante, 91
completamente covariante, 91
elettromagnetico, 103
quadrivettore
controvariante, 88
covariante, 89
quadriaccelerazione, 93
quadriforza, 98
quadrimomento, 97
quadrivelocità, 92
quantità di moto
conservazione della, v
di un sistema di particelle, ix
di una particella, v
olonomo, vincolo, 2
omogenea, funzione
energia cinetica, 26, 30, 38
orbita
chiusa, 31
circolare, 32
ellittica, 32
iperbolica, 32
limitata, 31
piano dell’orbita, 29
oscillatore armonico, 66, 73
corpo nero, 108
oscillatori accoppiati, 42
piccole oscillazioni, 37
Rayleigh, funzione di dissipazione di,
11
Rayleigh-Jeans
catastrofe di, 109
relazione di, 109
relatività
galileiana, 77
ristretta, 78
postulati, 78
quadrivettore, 88
tensore metrico, 89
reonomo, vincolo, 2
Routh
funzione di, 55
Routh, metodo di, 55
particella carica in campo elettromagnetico, 9, 103
pendolo piano, vi, 3, 7, 8
Planck, 110
legge di, 110
Poisson
parentesi di, 58
equazioni di Hamilton, 59
fondamentali, 59
proprietà, 59
teorema di, 60
potenziale
centrale, 28, 29
efficace, 31
d’arresto, 111
scabro, vincolo, 3
128
Indice analitico
scleronomo, 2
virtuali
principio dei lavori, 4
spostamenti, 3
viscosa, forza, 10
scleronomo, vincolo, 2
simmetria sferica, 29
simplettica, notazione, 53
spazio
delle configurazioni, 15
delle fasi, 47
spaziotempo, 78
spostamento
legge dello, 108
Stefan
costante di Stefan-Boltzmann, 107
legge di Stefan-Boltzmann, 108
successione di Fibonacci, 122
Wien, 108
costante di, 108
legge dello spostamento di, 108
tachione, 82
tardione, 82
tempo proprio, 87
tensore metrico
controvariante, 89
covariante, 89
tipo luce, 82
trasformazione
canonica, 61
funzione generatrice, 62
identica, 64
parentesi di Poisson, 65
di Galileo, 81
di gauge, 12
di Legendre, 47, 118
di Lorentz, 81
variabili
canoniche, 47
dinamiche, 58
variazionale
principio di Hamilton, 16
principio di Hamilton modificato, 57
vincolo
anolomono, 2
liscio, 3
olonomo, 2
corpo rigido, 2
reonomo, 2
scabro, 3
129