Omotetie (1/2)
• in geometria una trasformazione omotetica di centro Q è
una corrispondenza biunivoca tra punti dello spazio che
– fa corrispondere al punto Q se stesso
– ad un punto P, distinto da Q, un punto P’ tale che Q, P, P’ siano
allineati e che QP’=kQP con k∈
∈R, k≠
≠0, 1, -1 (k si dice ragione di
omotetia)
Corso di Laurea in Disegno Industriale
Corso di “Metodi Numerici per il Design”
Lezione 28 Maggio 2003
Trasformazioni IV
F. Caliò
1
Omotetia è una trasformazione geometrica non isometrica
con un punto unito, che modifica le distanze fra punti
attraverso un fattore di proporzionalità.
k > 1 dilatazione
k < 1 contrazione
2
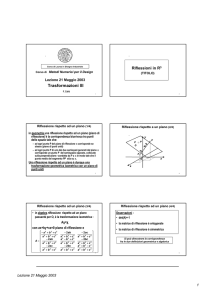
Omotetia con centro in Q diverso da O
Omotetie (2/2)
• in algebra omotetia con centro in Q diverso da O è
una trasformazione lineare
• in algebra una omotetia, con centro in O, è una
trasformazione lineare
Av+b=x
k 0 0 Av=x
A = 0 k 0
0 0 k con k∈
tale che:
∈R, k≠
≠0, 1,-1
ottenuta attraverso:
– traslazione di Q in O
– omotetia di centro O e ragione k
– traslazione opposta a quella del primo passo
È evidente la corrispondenza fra le due
definizioni geometrica e algebrica
Si può dimostrare la corrispondenza fra le due
definizioni geometrica e algebrica
3
Osservazione sull’omotetia
4
Applicazione di un'omotetia
Il centro di omotetia, individuato come punto unito
della trasformazione
risulta:
b1
x
=
1
−k
2
y = b
1− k
b3
z =
1− k
Av+b=x
5
6
Lezione 28 Maggio 2003
1
Esempio 1) (dalla definizione geometrica alla
Esempio 1) (dalla definizione geometrica alla
definizione algebrica) (1/2)
definizione algebrica) (2/2)
1) Esempio di costruzione di una omotetia di centro
Q(2,1,-3) e ragione k=2
2
0
0
0
2
0
1 0 0 v 1 − 2
0 1 0 v + − 1
2
0 0 1 v 3 3
0 v 1 − 2 2
0 v 2 + − 1 + 1
2 v 3 3 − 3
2
0
0
0 v 1 − 2 2
0 v 2 + − 1 + 1
2 v 3 3 − 3
2
0
0
0
0
2
0 v 1 − 4 2 2
0 v 2 + − 2 + 1 = 0
2 v 3 6 − 3 0
0
2
0
0
2
0
0 v 1 − 2
0 v 2 + − 1
2 v 3 3
7
Esempio 2) (dalla definizione algebrica alla
8
Esempio 2) (dalla definizione algebrica alla
definizione geometrica) (1/2)
1) Esempio di verifica di una omotetia; data la
definizione geometrica) (2/2)
trasformazione
2
0
0
0
2
0
− 2 = x − 2 x
− 1 = y − 2y
+ 3 = z − 2 z
2 x − 2 = x
2y − 1 = y
2 z + 3 = z
0 v 1 − 2
0 v 2 + − 1
2 v 3 3
è un'omotetia di ragione 2 e di centro determinabile
come punto unito della trasformazione:
x =2
y =1
z = − 3
Punto unito della trasformazione, centro dell'omotetia
9
Similitudine (1/2)
10
Similitudine (2/2)
• in geometria una trasformazione di similitudine di
ragione k è una corrispondenza biunivoca tra
punti dello spazio che
• in algebra una similitudine , di rapporto di similitudine
|k||, è una trasformazione lineare
– a due punti P e Q fa corrispondere due punti P’ e Q’ in modo
tale che la distanza fra P’ e Q’ sia |k|| con k≠
≠ 0,1,-1 volte la
distanza fra P e Q.
Similitudine è una trasformazione geometrica non
isometrica, che modifica le distanze fra punti
attraverso un fattore di proporzionalità |k|| .
Av+b=x
k 2
T
tale che: A A = 0
0
0
k2
0
0
0
2
k
con k∈
∈R, k≠
≠0, 1, -1
Si può dimostrare la corrispondenza fra le due
definizioni geometrica e algebrica
11
12
Lezione 28 Maggio 2003
2
Esempio 1) (dalla definizione geometrica alla
Osservazione sulla similitudine
definizione algebrica) (1/2)
1) Esempio di costruzione di una similitudine generata
• Se k fosse uguale ad 1 e -1 sarebbe una isometria
da una rotazione intorno all’asse z e angolo di
• omotetia di ragione k è similitudine |k||
• si può dimostrare che l’applicazione successiva di
omotetie e isometrie è similitudine
rotazione π/2 e da una omotetia di centro O e ragione
2, applicate successivamente
0 − 1 0 v 1
1 0 0 v
2
0 0 1 v 3
13
14
Esempio 1) (dalla definizione geometrica alla
Esempio 2) (dalla definizione algebrica alla
definizione algebrica) (2/2)
definizione geometrica) (1/2)
3
0
0
0
3
0
0
3
0
2) Esempio di verifica di una similitudine;data la
trasformazione:
0 0 − 1 0 v 1
0 1 0 0 v 2
3 0 0 1 v 3
−3
0
0
0
3
0
0 v 1
0 v 2
3 v 3
−3
0
0
0 v 1
0 v 2
3 v 3
è una similitudine infatti:
15
Esempio 2) (dalla definizione algebrica alla
Applicazione di una similitudine
definizione geometrica) (2/2)
0 3
− 3 0
0 0
0 0
0 3
3 0
−3
0
0
0 9
0 = 0
3 0
0
9
0
16
0
0
9
È una similitudine di ragione 3
17
18
Lezione 28 Maggio 2003
3
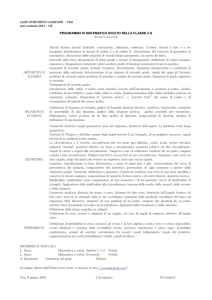
Sintesi
Av+b=x det(A)≠
≠0
A ortogonale
– A=I b=0
Sintesi
affinità
–A matrice di rotazione, b≠
≠ 0, nessun punto unito
glissorotazione
isometria
–A ortogonale, b=0 oppure b≠
≠ 0, un piano π
di punti uniti
riflessione rispetto a π
identità
– A=I b ≠ 0
–A matrice di riflessione, b≠
≠ 0, nessun punto unito
glissoriflessione
traslazione
– A ortogonale, b=0 oppure b ≠ 0, una retta r di
punti uniti
rotazione attorno ad r
19
20
Sintesi
k 0 0
A = 0 k 0 , un punto unito
k≠
≠0, 1, -1
0 0 k
k 2
AA A = 0
0
T
0
k
2
0
0
0
k2
omotetia
similitudine
k≠
≠0, 1, -1
21
Lezione 28 Maggio 2003
4