Analisi statistica degli errori
I valori numerici di misure ripetute
risultano ogni volta diversi ⇒ l’operazione
di misura può essere considerata un evento
casuale a cui è associata una variabile
casuale che è il valore della misura ⇒ la
trattazione dei dati sperimentali richiede
un’analisi statistica
La statistica analizza con metodi scientifici dati
relativi a
- fenomeni ripetibili infinite volte
(almeno in teoria)
- che possono dare origine a più risultati
*singolarmente imprevedibili
*che si escludono a vicenda uno con l’altro
I possibili risultati di tali fenomeni prendono il
nome di variabili casuali o aleatorie
Esempi di eventi casuali
• Lancio di un dado o di una moneta
• Estrazione di un numero compreso in un certo
intervallo
• Decadimento di un nucleo radioattivo
• Esiti di un trattamento farmacologico
• Durata media delle lampade
• …
Statistica descrittiva e statistica inferenziale
Statistica descrittiva:
Organizza e sintetizza i dati relativi ad un
“campione” relativamente piccolo
Statistica inferenziale:
Permette di estendere i risultati ottenuti
per un campione ad una “popolazione”
più ampia
La probabilità
La statistica analizza i dati relativi agli
eventi casuali in termini di
probabilità p(Ei)
ossia in termini di rapporto tra il numero ki
di casi favorevoli di un certo risultato Ei e il
numero K totale di casi possibili, purché
tutti questi siano ugualmente possibili:
p(Ei) = ki/K
Dalla definizione data consegue:
0 ≤ p(Ei) ≤ 1
p(Ei) = 0 : l’evento è impossibile
p(Ei) = 1 : l’evento è certo
Se gli eventi Ei sono mutuamente esclusivi ed
esauriscono tutti i possibili risultati delle prove si
ha:
p(E1) + p(E2) + … + p(EK) = 1
Esempio: lancio di un dado
• La probabilità che in un lancio esca una
qualsiasi delle facce è 1/6: 1 caso
favorevole su 6 casi ugualmente possibili
• La probabilità che in un lancio esca il “3”
o il “6” è 2/6: 2 casi favorevoli su 6 casi
ugualmente possibili
Questa definizione richiede che si possa
conoscere “a priori” se un certo evento
presenta n casi favorevoli su N casi possibili
ed equiprobabili.
Probabilità empirica o “a posteriori”
Se si eseguono su un sistema N prove e si osserva
che l’evento Ei si verifica ni volte (ni = frequenza
assoluta)
si definisce frequenza relativa
assoluta
all’evento fi (o probabilità empirica)
empirica il rapporto
ni/N. Per definizione risulta:
N
ni ≤ N ⇒ f i ≤ 1
∑
i =1
N
ni 1 N
N
f i = ∑ = ∑ ni = = 1
N i =1
N
i =1 N
Esiste una relazione tra
probabilità a priori e
probabilità empirica
???
Legge empirica del caso
Nei casi in cui è possibile conoscere la
probabilità a priori di un evento Ei si
osserva che al crescere del numero totale N
delle prove, eseguite nelle medesime
condizioni,
la
frequenza
relativa,
fluttuando, tende a stabilizzarsi intorno al
valore della probabilità a priori:
ni
p( Ei ) = lim
N →∞ N
Legge di distribuzione di probabilità
Ad ogni evento casuale E si può
associare una variabile casuale x a cui è
associata quindi anche una probabilità
p(x) corrispondente alla probabilità
p(E) dell’evento. Questa variabile può
essere discreta o continua
Variabili discrete e variabili continue
Variabile discreta = può assumere una serie
discreta (finita o infinita) di
valori.
Es.: lancio di un dado – 1, 2, …, 6
Variabile continua = può assumere un’infinità di
valori
che
variano
con
continuità
Es.:misura di una grandezza fisica
Distribuzione di probabilità di variabili discrete
L’insieme dei valori delle probabilità p(xi) che
competono alla variabile casuale x associata
all’evento aleatorio E costituisce la legge di
distribuzione di probabilità della variabile
aleatoria considerata. Per tutti i possibili eventi
del sistema deve risultare:
∑ p( x ) = 1
i
i
Distribuzione di probabilità di variabili continue
Per le variabili aleatorie continue non si può
parlare di probabilità come per le variabili discrete
ma si può associare ad esse una funzione f(x), detta
funzione densità di probabilità, tale che la
probabilità dp associata ad un intervallo
infinitesimo dx è data da dp = f(x)dx.
La probabilità che compete ad un intervallo finito
[x1,x2] è allora:
x2
Pr (x ∈ [x1 , x 2 ])= ∫ f (x)dx
x1
Distribuzione di probabilità di variabili continue
La funzione densità di probabilità è una
funzione non negativa che soddisfa alla
condizione
+∞
∫ f (x)dx = 1
−∞
detta condizione di normalizzazione.
Distribuzione di probabilità di variabili continue
Si può allora definire la funzione di
distribuzione F per una variabile continua x
come:
x
F ( x)= ∫ f (t )dt
−∞
che rappresenta la probabilità di osservare un
valore non inferiore ad x e che soddisfa la
condizione F(∞) = 1.
Valore atteso
Se xi sono i possibili valori di una variabile casuale,
ciascuno con probabilità p(xi), si definisce valore
atteso di x la quantità:
+∞
µ = ∑ xi p ( xi )
µ = ∫ x ∗ f ( x)dx
i
−∞
Per la legge empirica del caso, per un campione N di
prove, se N → ∞ la media campionaria x tende al
valore atteso: N
x=
∑n x
i
i =1
N
i
N
N
i =1
i =1
= ∑ x i f i (x i ) ⎯N⎯
⎯→ ∑ x i p i (x i ) = µ
→∞
Varianza
Varianza σ2 = media del quadrato degli scarti fatta
sulla popolazione
σ = ∑ ( xi − µ ) p ( xi )
2
2
i
Descrive la dispersione della variabile casuale
attorno al valor medio µ.
La radice quadrata σ rappresenta la deviazione
standard della popolazione che può essere stimata
da un campione di misure tramite lo scarto
quadratico medio.
La distribuzione binomiale o di Bernoulli
La distribuzione binomiale (o di Bernoulli)
Bernoulli dà la
distribuzione di probabilità per eventi casuali
ciascuno dei quali può assumere, in maniera
indipendente dagli altri, solo uno tra due valori
(evento dicotomico).
Esempi
¾ Qual è la probabilità che lanciando N = 9 dadi la faccia
con il numero 5 esca R = 3 volte?
¾ Qual è la probabilità che in famiglie aventi N = 3 figli ci
siano R = 2 femmine?
¾ Su N = 15 pazienti operati quanti (R) ci aspettiamo
abbiano complicazioni se la percentuale di
complicazioni osservata è del 20%?
¾ Se il 10% dei bulloni prodotti da una macchina è
difettoso che probabilità abbiamo che su N = 100
bulloni R = 10 siano difettosi?
La distribuzione binomiale o di Bernoulli
N!
R
( N −R)
P ( R, N ) =
p (1 − p )
R!∗( N − R )!
N = numero di prove
R = numero di successi ( = numero di eventi favorevoli)
p = probabilità di successo in una prova
q = 1 – p = probabilità di insuccesso
P(R,N) = probabilità di avere R successi su N prove
Caratteristiche della distribuzione binomiale
• Dipende da 2 parametri: N e p
• Il numero medio di successi è dato da:
N
R = ∑ RP( R, N ) = Np
i =1
• La deviazione standard è data da:
σ R = Npq = Np (1 − p)
Caratteristiche della distribuzione binomiale
In generale:
¾ se p ≠ ½ la distribuzione binomiale non è
simmetrica ed il numero medio di successi non
coincide con il numero più probabile
p < ½ : il massimo si sposta verso lo zero;
p > ½ : il massimo si sposta dalla parte
opposta
¾ si osserva che, se la probabilità p non è molto
vicina ai valori estremi 0 ed 1, al crescere di N la
distribuzione binomiale tende a simmetrizzarsi
intorno al valor medio Np
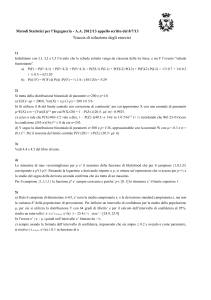
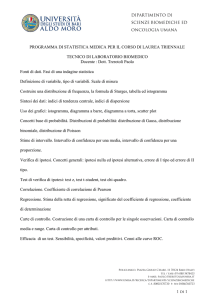
Distribuz ione di probabilità pe r la nascita di R
femmine (R = 0, 1, 2, 3) in una famiglia
con N = 3 figli
p = 1/2
Distribuz ione di probabilità che la faccia
"cinque " e sca R volte (R = 0, 1, ..., 9)
ne l lancio di N = 9 dadi
p = 1/6
3,50E-01
3,00E-01
P(R,N)
P(R,N)
4,00E-01
4,00E-01
3,50E-01
3,00E-01
2,50E-01
2,00E-01
1,50E-01
1,00E-01
5,00E-02
0,00E+00
2,50E-01
2,00E-01
1,50E-01
1,00E-01
5,00E-02
0
1
2
3
4
5
6
7
8
9
0,00E+00
0
R
1
2
3
R
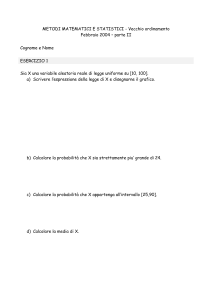
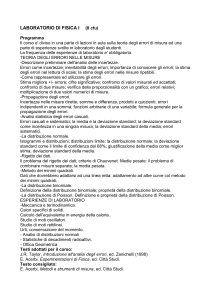
Distribuz ione di probabilità che si ve rifichino
R casi di complicaz ioni (R = 0, 1, 2, …, 15)
su N = 15 paz ienti operati
p = 0,2
Distribuz ione di probabilità di R bulloni
dife ttosi (R = 0, 1, 2, …, 50)
su N = 50 bulloni prodotti
p = 0,1
3,00E-01
2,00E-01
1,80E-01
2,50E-01
1,60E-01
P(R,N)
1,40E-01
1,50E-01
1,00E-01
1,20E-01
1,00E-01
8,00E-02
6,00E-02
5,00E-02
4,00E-02
2,00E-02
0,00E+00
R
R
50
45
40
35
30
25
20
15
10
5
0
14
12
10
8
6
4
0,00E+00
2
0
P(R,N)
2,00E-01
La distribuzione di Poisson
La distribuzione di Poisson dà la distribuzione di
probabilità di sistemi costituiti da un numero N
molto elevato di elementi, ciascuno avente una
probabilità p molto piccola di subire un evento
casuale.
Esempi
¾ Se la probabilità p che un certo individuo sia allergico ad un
certo vaccino è 0.001 che probabilità c’è che su N = 2000
individui R risultino allergici al vaccino stesso?
¾ Se una macchina produce in un giorno N = 500 lampadine ed
ogni lampadina presenta una probabilità p = 0.01 di essere
difettosa che probabilità c’è che tra le lampadine prodotte in un
giorno R siano difettose?
¾ Un campione di sangue contenente N = 700 globuli rossi viene
osservato al microscopio su un vetrino suddiviso da un retino in
100 cellette (p = 1/100). Qual è la probabilità che in una celletta
capitino R globuli rossi?
¾ Che probabilità c’è che in un secondo vengano emesse R
particelle da un grammoatomo di sostanza radioattiva (N=1023
atomi) i cui atomi hanno una probabilità p di decadere
(emettendo una particella) pari a 10-22 per secondo?
La distribuzione di Poisson
Numero di prove N elevato ⇒ formula della
binomiale praticamente inutilizzabile (calcolo di
fattoriali di numeri troppo grandi)
Se N → ∞ e p → 0 in modo che λ = Np rimanga
finito la distribuzione binomiale può essere
approssimata con una funzione più semplice
(distribuzione di Poisson)
Poisson avente la forma:
P( R) =
λ
R
R!
e
−λ
λ = pN
Caratteristiche della distribuzione di Poisson
• Dipende solo dal parametro λ
• non è simmetrica ed il numero medio di
successi non coincide con il numero più
probabile
• Il numero medio di successi è dato da:
R = Np =λ
Caratteristiche della distribuzione di Poisson
• La deviazione standard è data da:
σR = λ
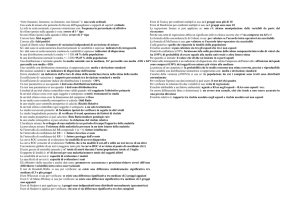
• Al crescere del valore del parametro λ
tende a divenire simmetrica e raggiunge
il massimo intorno al valor medio
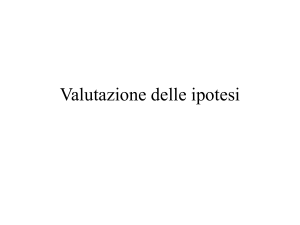
Distribuzione di Poisson per λ = Np = 5
Distribuzione di Poisson per λ = Np = 2
2,00E-01
3,00E-01
1,80E-01
2,50E-01
1,60E-01
1,40E-01
2,00E-01
P(R)
P(R)
1,20E-01
1,50E-01
1,00E-01
8,00E-02
1,00E-01
6,00E-02
4,00E-02
5,00E-02
2,00E-02
7
8
9
14
6
12
5
10
4
8
3
6
2
4
1
0
0
2
0,00E+00
0,00E+00
R
R
Distribuzione di Poisson per λ = Np = 10
Distribuzione di Poisson per λ = Np = 7
1,40E-01
1,60E-01
1,40E-01
1,20E-01
1,20E-01
1,00E-01
P(R)
8,00E-02
6,00E-02
8,00E-02
6,00E-02
4,00E-02
4,00E-02
2,00E-02
2,00E-02
0,00E+00
R
R
40
36
32
28
24
20
16
8
12
4
0
21
18
15
12
9
6
0,00E+00
3
0
P(R)
1,00E-01
La distribuzione di Gauss
Per molte variabili casuali continue la
densità di probabilità f(x) è data dalla
distribuzione di Gauss o normale
f ( x) = Ce
− h2 ( x−m)2
dove C, h ed m sono costanti.
Proprietà della distribuzione di Gauss
La funzione di Gauss è:
¾ una funzione continua tra - ∞ e + ∞;
¾ simmetrica intorno al valore massimo C che si
ha in corrispondenza di x = m;
¾ di larghezza w = 2/h, avendo definito la
larghezza come la distanza tra le due ascisse in
corrispondenza delle quali la funzione si riduce
di 1/e [f(m ± 1/h) = C/e]. h prende il nome di
modulo di precisione ed è tanto più grande
quanto più la curva è stretta.
Proprietà della distribuzione di Gauss
¾ Presenta due flessi in corrispondenza di
x = m±
1
h 2
¾ La funzione di Gauss dipende da due
parametri: m ed h.
¾ Il valore di C si determina imponendo che la
probabilità totale (= certezza) sia 1:
+∞
∫ Ce
−∞
−h2 ( x−m)2
dx = 1 ⇒ C=
h
π
Il parametro m
Il valor medio atteso µ è dato da
+∞
µ = ∫ xf ( x)dx = m
−∞
In corrispondenza di µ la funzione di Gauss
assume il valore massimo
1
σ
2π
Il parametro h
La deviazione standard σ si ricava dalla relazione:
1
σ = ∫ [x − µ ( x)] f ( x)dx = 2
−∞
2h
2
+∞
2
σ rappresenta il valor medio dei quadrati degli
scarti dalla media [(x – µ)2] e determina la
larghezza della distribuzione.
La distribuzione di Gauss o normale
•
Funzione di distribuzione gaussiana
De n sità di probabil ità
1,60
1,20
1
f ( x) =
e
2π σ
0,80
0,40
0,00
1,00
2,00
3,00
x
4,00
5,00
(
x − µ )2
−
2σ 2
La curva di Gauss al variare di µ e σ
Funzione di distribuzione gaussiana al variare del
parametro µ
Funzione di distribuzione gaussiana al variare del
parametro σ
2,00
4,00
3,00
µ = 4,00; σ = 0,3
µ = 1,00; σ = 0,3
1,00
Densità di probabilità
Densità di probabilità
µ = 3,00; σ = 0,3
µ = 3,00; σ = 0,3
µ = 3,00; σ = 0,6
µ = 3,00; σ = 0,1
2,00
1,00
0,00
0,00
1,00
2,00
3,00
x
4,00
5,00
6,00
0,00
1,00
2,00
3,00
x
4,00
5,00
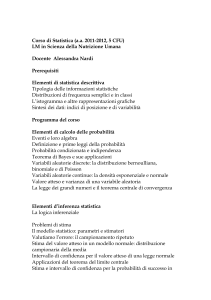
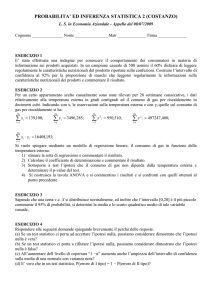
Che cosa rappresenta σ?
L’area sotto la curva rappresenta la
probabilità che la variabile x acquisti
un valore compreso tra gli estremi
dell’intervallo considerato.
Densità di probabilità
1,50
1,00
0,50
0,00
1,00
2,00
3,00
x
4,00
5,00
L’area sotto la curva compresa
tra [µ - σ; µ + σ] corrisponde al
68.27% dell’area totale;
tra [µ - 2σ; µ + 2σ] corrisponde al
95.45% ;
tra [µ - 3σ; µ + 3σ] corrisponde al
99.73% .
Approssimazioni gaussiane della distribuzione
binomiale e della distribuzione di Poisson
Nelle condizioni in cui la distribuzione binomiale e la
distribuzione di Poisson tendono a simmetrizzarsi possono
essere approssimate con una gaussiana avente
- valore atteso µ = Np e deviazione standard σ = Npq per
la binomiale;
- valore atteso µ = λ e deviazione standard σ = λ per la
poissoniana;
In generale l’approssimazione con la gaussiana è ritenuta
buona quando:
¾ Np ≥ 5 ed N(1-p) ≥ 5 per la binomiale
¾ λ ≥ 8 per la poissoniana.
Come si applicano i metodi statistici
all’analisi delle misure
???
Che cosa rappresentiamo nell’istogramma?
L’ampiezza ∆x delle classi è
costante ⇒ l’area di ciascun
rettangolo è proporzionale
alla frequenza assoluta ossia
al numero ni di misure che
cadono nell’intervallo ∆x.
Frequenza assoluta
20
15
10
N
∑n
5
0
2,48 2,76 3,04 3,32 3,60
x
i =1
i
=N
L’area di tutti i rettangoli è
proporzionale al numero
totale N di misure
Possiamo rappresentare diversamente queste
informazioni?
Fre que nza re lativa
0,40
0,35
0,30
0,25
0,20
0,15
0,10
0,05
0,00
2,48 2,76 3,04 3,32 3,60
x
L’area dei rettangoli è
proporzionale alla frequenza
relativa fi ⇒ l’altezza dei
rettangoli è proporzionale
alla densità di frequenza
fi/∆x (= frequenza per
intervallo unitario)
N
∑
De ns ità di fre que nza
0,12
0,10
i =1
0,08
⎛ fi ⎞
f i = ∑ ⎜ ⎟∆x = 1
i =1 ⎝ ∆x ⎠
N
0,06
0,04
0,02
0,00
2,48 2,76 3,04 3,32 3,60
x
La somma delle aree dei
rettangoli è uguale ad 1
Che succede aumentando il numero N delle misure del campione?
¾ la frequenza di ciascun intervallo
aumenta ⇒ l’ampiezza delle classi
si restringe
50 misure
∆ x = 0.28
Densità di frequenza
0,12
0,10
¾ la frequenza relativa tende alla
probabilità
0,08
0,06
0,04
0,02
0,00
2,48
2,76
3,04
3,32
3,60
x
1000 misure
∆ x = 0,08
L’area di ciascun rettangolo indica la
probabilità che la variabile x acquisti
un valore compreso nell’intervallo ∆x.
1,4
1,2
1
0,8
0,6
0,4
0,2
3,80
3,64
3,48
3,32
3,16
3,00
2,84
2,68
2,52
2,36
2,20
0
2,04
Densità di frequenza
¾ l’istogramma tende a divenire una
curva continua.
x
L’area totale indica la probabilità che la
variabile acquisti un valore compreso
tra gli estremi dell’intervallo
rappresentato.
La funzione densità di probabilità per le
misure di grandezze fisiche
Nella condizione limite
N →∞
∆x ⎯⎯⎯→ 0
L’istogramma tende ad una curva continua, la
funzione densità di probabilità.
Per le misure delle grandezze fisiche la funzione
densità di probabilità nel caso limite di N → ∞ segue
l’andamento della distribuzione di Gauss o
normale.
Valore vero di una misura
Il valore atteso µ, calcolato per la distribuzione
limite (corrispondente cioè ad una serie infinita
di misure), può essere assunto come valore vero
x* della misura della grandezza X.
La deviazione standard σ, invece, caratterizza
quantitativamente la precisione della misura.
Distribuzione degli errori
La funzione di Gauss rappresenta sia la
distribuzione delle misure x della grandezza X,
sia la distribuzione dell’errore definito come
differenza tra il valore x della misura ed il valore
vero x* o (il valore atteso): x – x* = x – µ.
La distribuzione degli errori è centrata intorno
allo zero.
La deviazione standard della media
Si può dimostrare che la deviazione standard della
distribuzione delle medie di campioni aventi ciascuno N
misure è data da:
σx =
σ
N
ossia è 1 N volte più piccola di quella delle singole misure
⇒ le medie campionarie si distribuiscono intorno alla media
delle medie (valore vero) con una curva di distribuzione
gaussiana più stretta di quella delle singole misure.
Valore più probabile e
limiti di validità di una misura
In generale il valore più probabile ed i limiti
di validità della misura di una grandezza
fisica devono essere stimati a partire da un
campione ridotto di dati.
Stima dei parametri della distribuzione
Che cosa vuol dire stimare un parametro?
- ipotizzare la distribuzione cui obbedisce la
popolazione da cui il campione è estratto;
- calcolare il valore cui corrisponde la massima
probabilità di coincidere con il parametro della
popolazione.
Livello di confidenza ed intervallo di fiducia
La stima dei parametri fatta da un campione ha
comunque un carattere casuale ⇒ cambia al
variare
del
campione
secondo
una
certa
distribuzione di probabilità ⇒ occorre stabilire
qual è la probabilità ( = livello di confidenza ) che
il valore vero dei parametri cada entro un certo
intervallo (= intervallo di confidenza o di fiducia).
fiducia
Probabilità per il valore di una misura
Se le misure seguono una distribuzione normale ( =
assenza di errori sistematici) l’integrale di Gauss
consente di valutare la probabilità che un
particolare valore della misura cada in un certo
intervallo (a,b):
1
P ( a ≤ x ≤ b) =
σ 2π
b
∫e
a
( x−µ )2
−
2σ 2
dx
Variabile standardizzata z
L’integrale precedente può essere reso indipendente
da µ e σ definendo la variabile standardizzata z:
z
x−µ
z=
σ
z misura le deviazioni della misura x dalla media in
“unità σ”. Si ha allora:
1
P ( a ≤ x ≤ b) = P ( z a ≤ z ≤ zb ) =
2π
i cui valori sono tabulati.
zb
∫e
za
z2
−
2
dz
Intervalli di confidenza
La probabilità che il valore di una misura cada
entro un certo intervallo prende il nome di livello di
confidenza e il corrispondente intervallo prende il
nome di intervallo di confidenza o di fiducia.
fiducia
Intervallo di confidenza al 68.27 % ⇒ z = 1
Intervallo di confidenza al 95 % ⇒ z = 1.96
Intervallo di confidenza al 95.45 % ⇒ z = 2
Intervallo di confidenza al 99 % ⇒ z = 2.58
Intervallo di confidenza al 99.73 % ⇒ z = 3
Stima dei parametri della distribuzione
gaussiana
La miglior stima del valore atteso è la media
campionaria
x
; la miglior stima della deviazione
standard è lo scarto quadratico medio s;
s la miglior
stima della deviazione standard della media è
s
N
Presentazione del risultato di una misura
Dato un campione di N misure (N ≥ 30) distribuite
normalmente:
- la miglior stima del valor vero è la media
aritmetica;
- la stima dell’incertezza della misura è espressa
tramite la deviazione standard della media
s
σx =
N
.
Presentazione del risultato di una misura
Il risultato di un campione di misure di una certa
grandezza X si presenta correttamente come segue:
s ⎞
⎛
x = ⎜x±3
⎟um
N⎠
⎝
ciò vuole significare che esiste la probabilità
P( µ − x ≤ 3σ x ) = 99.7%
che una qualsiasi media campionaria scarti dal valore
atteso meno di tre deviazioni standard della media.
Limiti di fiducia
Per una popolazione normale, se x è la media
campionaria, i limiti di fiducia per µ sono dati da:
x±z
σ
N
dove N è il numero di misure del campione e z
dipende dal livello di confidenza richiesto. Si ha
quindi:
σ
µ = x± z
N
Limiti di fiducia
Intervallo di confidenza al 68.27 % ⇒ z = 1
Intervallo di confidenza al 95 % ⇒ z = 1.96
Intervallo di confidenza al 95.45 % ⇒ z = 2
Intervallo di confidenza al 99 % ⇒ z = 2.58
Intervallo di confidenza al 99.73 % ⇒ z = 3
Limiti di fiducia: esempio
Sono state condotte delle misure per ricavare il raggio di una sfera
piena. I valori ottenuti per i raggi sono riportati nella tabella
seguente:
N° misura
1
Raggio (cm)
6.98
2
3
4
5
6
6.94 6.98 7.01 6.94 7.02
7
8
9
10
7.01
6.97
6.94
6.99
Calcolare il raggio medio della sfera ed i valori di confidenza al 95%
ed al 99% per il valore del raggio reale.
10
R =
∑ Ri
i =1
10
∑ (R
10
= 6.98cm
σR =
i =1
i − R
(10 − 1)
)
2
= 0.030cm
Limiti di fiducia: esempio
Per i limiti di confidenza si avrà quindi:
95%:
0.030
0.030
6.98 − 1.96 *
≤ R ≤ 6.98 + 1.96 *
10
10
0.030
0.030
99%: 6.98 − 2.58 *
≤ R ≤ 6.98 + 2.58 *
10
10
Teoria delle decisioni statistiche
Che cosa si intende per decisione statistica?
Esempi:
1.
Una moneta viene lanciata 6 volte e “testa” si
presenta 6 volte. Possiamo ritenere truccata la
moneta?
Teoria delle decisioni statistiche
2. Una casa farmaceutica assicura che un
medicinale antiallergico è efficace nel 95%
dei casi. In un campione di 200 individui che
soffrono di questa allergia la medicina si
dimostra efficace in 160 casi. Si può ritenere
legittima l’affermazione fatta dalla casa
produttrice?
Teoria delle decisioni statistiche
3.
Le resistenze alla rottura delle funi prodotte da una
fabbrica hanno una media pari a 1800 N ed uno
scarto quadratico medio pari a 100 N. Si pensa di
aumentare la resistenza alla rottura immettendo
una nuova tecnica nel processo produttivo. Un
campione di 50 funi, prodotto con la nuova tecnica,
mostra una resistenza media alla rottura di 1850 N.
Possiamo ritenere che ci sia stato un effettivo
miglioramento?
Teoria delle decisioni statistiche
Ogni decisione presa intorno ad una popolazione
sulla base di dati campionari si chiama decisione
statistica.
I procedimenti che permettono di accettare o
rifiutare una ipotesi o di determinare se i
campioni osservati differiscono significativamente
dai risultati attesi prendono il nome di test di
ipotesi o di significatività.
Teoria delle decisioni statistiche
La probabilità massima con cui rischiamo di
ritenere falsa una ipotesi che invece è vera prende
il nome di livello di fiducia o di significatività del
test.
Ad esempio, richiedere un livello di fiducia del 5%
in un test delle ipotesi significa che ci sono 5
probabilità su 100 di rifiutare l’ipotesi quando
dovrebbe essere accettata, cioè siamo fiduciosi al
95% di aver preso la decisione corretta.
Come si ripercuote l’errore di una misura
diretta sulle grandezze derivate
???
Migliore stima di una grandezza derivata
G = G(x, y, z, …) grandezza derivata
Gli errori ∆x, ∆y, ∆z, … nelle misure dirette
rappresentano piccole variazioni delle variabili
indipendenti
⇒
⇒
Possiamo assumere come migliore stima della
grandezza derivata il valore della funzione
calcolato in corrispondenza delle medie
campionarie delle grandezze dirette:
G ( x, y, z ,...) = G ( x, y, z ,...)
Errore massimo sulla grandezza
derivata
Nelle ipotesi precedenti l’errore massimo
sulla grandezza derivata può essere stimato
tramite la relazione:
∂G
∆G ≅
∂x
∂G
∆x +
∂y
x= x
∂G
∆y +
∂z
y= y
∆z + ...
z=z
in cui le derivate parziali sono prese in valore
assoluto poiché si tratta di errore massimo.
Errore probabile sulla grandezza
derivata
Se gli errori sulle misure dirette sono
indipendenti l’errore probabile σG sulla
grandezza derivata è dato da:
2
⎛ ∂G ⎞
⎛ ∂G ⎞
⎛ ∂G ⎞
2
2
2
⎜
⎟
σG = ⎜
σ
+
σ
+
σ
⎟
⎜
⎟
x
y
z + ...
⎜
⎟
⎝ ∂x ⎠ x = x
⎝ ∂z ⎠ z = z
⎝ ∂y ⎠ y = y
2
2
Errore relativo massimo sulla
grandezza derivata
Se G è una grandezza derivata
l’errore relativo massimo è dato da:
∆G dG
εr =
≅
= d ln G
G
G
Errore relativo massimo sulla
grandezza derivata
Se G è una grandezza derivata tramite una
relazione funzionale del tipo
G = xαyβzγ …
L’errore relativo massimo è dato da:
∆x
∆y
∆z
ε r = d ln( x y z ...) = α
+β
+γ
+ ...
x
y
z
α
β
γ
Errore relativo probabile sulla
grandezza derivata
Se G è una grandezza derivata l’errore
relativo probabile è dato da:
εr =
σG
G
Media pesata
Può accadere che di una grandezza fisica si
abbiano M serie di misure ottenute con strumenti
diversi.
Se le misure possono essere considerate
consistenti,
consistenti cioè non affette da errori sistematici
(⇒ le medie sono distribuite normalmente), la
miglior stima della misura della grandezza è data
dalla media pesata.
pesata
Media pesata
M
∑
µˆ =
j =1
M
∑
j =1
xj =
σj =
xj
σ
2
j
1
σ
M
=
2
j
∑ pj xj
j =1
M
∑ pj
j =1
valor medio di ciascun campione
deviazione standard della media di ciascun
campione
pj =1 σ
2
j
= peso della media
xj
Media pesata
Applicando la legge di propagazione degli errori si
verifica facilmente che la deviazione standard della media
pesata σµ è data da:
σµ =
1
N
1
∑
2
σ
j=1
j
essendo σj la deviazione standard della media di ciascun
campione.