Appunti di Elettrotecnica Computazionale
29 settembre 2007
2
Indice
1 INTRODUZIONE
1
2 RIFORMULAZIONI
7
1.1 Operatori matematici . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Equazioni di Maxwell . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Conservazione della carica . . . . . . . . . . . . . . . . . . . .
1.3 Legami costitutivi . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Condizioni d'interfaccia . . . . . . . . . . . . . . . . . . . . . . . . .
1.5 Problemi computazionali . . . . . . . . . . . . . . . . . . . . . . . . .
2.1
2.2
2.3
2.4
2.5
Caso Elettrostatico . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Caso Magnetostatico . . . . . . . . . . . . . . . . . . . . . . . . . . .
Campo di Corrente . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Caso Magnetostatico 2D . . . . . . . . . . . . . . . . . . . . . . . . .
Condizioni al contorno . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5.1 Condizioni di Dirichelet . . . . . . . . . . . . . . . . . . . . .
2.5.2 Condizioni di Newmann . . . . . . . . . . . . . . . . . . . . .
2.5.3 Innito riportato al nito . . . . . . . . . . . . . . . . . . . .
2.5.4 Simmetrie e antisimmetrie . . . . . . . . . . . . . . . . . . . .
2.5.5 Altri casi di simmetrie . . . . . . . . . . . . . . . . . . . . . .
2.6 Conclusioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
2
2
3
3
4
7
8
9
9
10
10
10
11
11
12
12
3 CASO MAGNETOSTATICO 3D CON IL POTENZIALE SCALARE
15
3.1 Potenziale scalare ridotto . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2 Potenziale scalare totale . . . . . . . . . . . . . . . . . . . . . . . . . 16
4 CASO MAGNETICO QUASI STAZIONARIO
19
5 DIFFERENZE FINITE
23
4.1 Problema Tridimensionale . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2 Problema Bidimensionale . . . . . . . . . . . . . . . . . . . . . . . . 20
5.1 Considerazioni sul dominio . . . . . . . . . . . . . . . . . . . . . . .
5.2 Risoluzione Equazione di Laplace . . . . . . . . . . . . . . . . . . . .
5.2.1 Coeciente di sparsita di riga (c.s.r) . . . . . . . . . . . . . .
5.2.2 Coeciente di sparsita globale (c.s.g) . . . . . . . . . . . . .
5.2.3 Storage compatto . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Condizioni al contorno . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.1 Bordo di Dirichelet . . . . . . . . . . . . . . . . . . . . . . . .
5.3.2 Bordo di Newmann . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Risoluzione Equazione di Poisson . . . . . . . . . . . . . . . . . . . .
5.5 Dominio non quadrato . . . . . . . . . . . . . . . . . . . . . . . . . .
i
23
24
25
25
25
26
26
27
28
28
ii
INDICE
5.6 Caso magnetico quasi stazionario con il potenziale vettore monocomponente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.7 Stabilita e accuratezza . . . . . . . . . . . . . . . . . . . . . . . . . . 31
6 METODO THETA
33
7 ELEMENTI FINITI (FEM)
39
6.1 Metodo Theta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Risoluzione dei circuiti con il metodo theta . . . . . . . . . . . . . .
6.2.1 Regime stazionario . . . . . . . . . . . . . . . . . . . . . . . .
6.2.2 Componenti . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.3 Analisi Nodale(non modicata) . . . . . . . . . . . . . . . . .
6.2.4 Regime variabile . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Parametri dei materiali che variano da punto a punto . . . . . . . .
7.1
7.2
7.3
7.4
7.5
7.6
7.7
7.8
7.9
7.10
Considerazioni domino . . . . . . . . . . . . . . . . . . . . . . . . . .
Funzioni Interpolanti . . . . . . . . . . . . . . . . . . . . . . . . . . .
Condizioni d'interfaccia . . . . . . . . . . . . . . . . . . . . . . . . .
Risoluzione con il metodo Variazionale . . . . . . . . . . . . . . . . .
7.4.1 Calcolo dei coecienti Ki;j . . . . . . . . . . . . . . . . . . .
7.4.2 Condizioni al contorno . . . . . . . . . . . . . . . . . . . . . .
Risoluzione con il metodo dei Residui Pesati . . . . . . . . . . . . . .
Caso Elettrostatico 2D/3D e Magnetostatico 2D . . . . . . . . . . .
Caso Magnetostatico 3D con il potenziale scalare . . . . . . . . . . .
Caso magnetico quasi stazionario . . . . . . . . . . . . . . . . . . . .
Problemi non lineari . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.9.1 Problema magnetico non lineare . . . . . . . . . . . . . . . .
7.9.2 Tecnica del rilasamento . . . . . . . . . . . . . . . . . . . . .
Reticolazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.10.1 Reticolazione in 2D . . . . . . . . . . . . . . . . . . . . . . .
33
34
35
35
35
36
37
39
39
42
42
43
44
45
49
50
50
51
51
52
52
53
Capitolo 1
INTRODUZIONE
Consiste nell'Analisi Numerica applicata ad esercizi di magnetismo e a circuiti elettrici
Si pregge di risolvere:
problemi complessi che anche se esiste una soluzione analitica questa e dicile
da trovare, es. circuiti elettrici con molti lati.
Problemi che non hanno soluzioni analitiche
Problemi non lineari
Libri consigliati:
Quarteroni / Salieri, Spring,Introduzione al calcolo scientico
Guarnirei / Malsani, Magnetismo stazionario e quasi-stazionario
A. Bossavit, Computational....
Chua, Kuh, Desau, Circuiti lineari e non lineari
Francesco Trevisan, Modelli numerici per campi e circuiti
1.1
Operatori matematici
@ @ @
; ;
Operatore Nabla r = @x
@y @z
Divergenza r w(x;y;z) = @w
+ @w + @w vettore ! scalare
@x @y @z
0
i j k 1
Rotore r w(x;y;z) = det @ @x@ @y@ @z@ A vettore ! vettore
wx wy wz
Gradiente rf(x;y;z) =
Laplaciano
! scalare
r2 f
@f @f @f
; ;
@x @y @z
= r rf =
scalare ! vettore
@f @f
r @f
; ;
@x @y @z
1
=
@2f
@x2
2
2
+ @@yf2 + @@zf2 scalare
2
CAPITOLO 1.
1.2
INTRODUZIONE
Equazioni di Maxwell
r B = @@tB
(1.1)
1.2.1
r H = J + @@tD
(1.2)
r B = 0
(1.3)
r D = (1.4)
Conservazione della carica
Partendo dalla (1.2)
r H = J + @@tD
Applico la divergenza ad entrambi i membri
r r H = r (J + @@tD )
Sapendo che r r w = 01
0 = r J + r @@tD
Sviluppando @ @@tD @ @@tD @ @@tD
0 = r J + @x + @y + @z
@ 2 D @ 2 D @ 2 D
0 = r J + @x@t
+ @y@t + @z@t
@ @ D @ D @ D
0 = r J + @t @x + @y + @z
L'ultimo termine
e r D
@
0 = r J + @t r D
Da cui dalla (1.4), si ottiene:
r J = @
@t
I problemi possono essere divisi in tre grandi categorie:
Regime stazionario: Le grandezze non dipendono dal tempo ! le equazioni
magnetiche ed elettriche non dipendono dal tempo
Quasi-stazionario: magnetico @@tD = 0 elettrico @@tB = 0
1
k
rr
y
@w
@x
x
@w
@y
w(x;y;z )
=
@
=
2 wz
@x@y
r
@
det
2 wy
@x@z
+
@
i
j
k
@
@
@
@x
@y
@z
wx
wy
wz
2 wx
@y@z
@
2 wz
@y@x
+
!
= i
@
2 wy
@z@x
@
x
y
@w
@w
@y
@z
2 wx
@z@y
=0
+ j
x
@w
@z
z
@w
@x
+
3
Propagazione per onde: servono tutte le equazioni perche c'e una relazione
tra campo elettrico e campo magnetico.
Le equazioni di Maxwell non bastano a risolvere i problemi perche ho piu incognite
che equazioni, quindi devo introdurre le equazioni costitutive.
1.3
Legami costitutivi
1
B = H = H
D = E
1
J = E = E
In questo caso considero , , costanti e non variabili dal punto.
Nel caso un po' piu generale invece queste dipendono dal punto dello spazio cioe
= (x;y;z) , = (x;y;z) , = (x;y;z) .
Molti materiali poi hanno comportamenti diversi a seconda della direzione, cioe sono
anisotropi. In questo caso , , sono delle matrici 3 x 3 denite Tensori Diagonali:
0
1 0
1 0
1 0
1
x 0 0
Bx
Hx
x 0 0
= @ 0 y 0 A @ By A = @ 0 y 0 A @ Hy A
(1.5)
0 0 z
0 0 z
Bz
Hz
Ci sono poi casi in cui ci sono delle componenti fuori diagonale, cioe una sollecitazione lungo x provoca una reazione lungo y.
Ci sono poi casi in cui esse dipendono dall'incognita e quindi sono non lineari
Es. = f (H )
Figura 1.1: Materiale non lineare
Un'ulteriore problema e l'isteresi dei materiali ferromagnetici.
1.4
Condizioni d’interfaccia
Si conservano all'interfacciaBn, Dn , Ht , Et n = normale; t = tangente
I campi non sono continui all'interfaccia e quindi in quei punti non posso calcolare
ne divergenza ne rotore.
4
CAPITOLO 1.
1.5
INTRODUZIONE
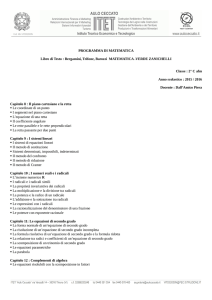
Problemi computazionali
L'analisi di un problema sico avvine nel modo elencato in gura 1.2 Una precisa-
Figura 1.2:
zione va fatta sul procedimento analitico in quanto per via delle smplicazioni la
soluzione non e ropriamente quella esatta. Tanti piu dettagli metto nel mio modello matematico, tanto piu questo si avvicina al mio problema sico ma allo stesso
tempo diventa piu complesso e non e detto che poi riesco a trovarne la soluzione.
Si fanno vari modelli con livelli di dettaglio diversi e si vede poi quanto inuiscono
le approssimazioni anche in base al risultato che voglio ottenere.
Ci sono poi dei limiti sici dei calcolatori che anche se si spostano sempre piu in la
esisteranno sempre:
Limiti sui tempi di calcolo: devo dare una risposta in un tempo ragionevole
che dipende dai MFLOPS (milioni di operazioni in virgola mobile al secondo)
che e in grado di fare il mio calcolatore
Limiti sulla memoria del calcolatore
Precisione nita: non valgono la proprieta distributiva e commutativa. Es.
(1+10100) 10100 = 0, questo perche l'uno e piccolo rispetto all'altro termine
e viene quindi scartato. Invece 1 + (10100 10100) = 1.
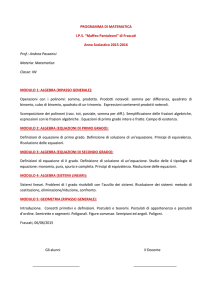
Passo da un modello continuo ad un modello discreto (Discretizzazione), cioe
non posso calcolare un numero innito di punti ma solo un numero nito.
Figura 1.3: Discretizzazione di una Figura 1.4:
funzione
dominio
Discretizzazione di un
5
Costo computazionale: sono io che scelgo il numero di punti da calcolare pero
bisogna sempre tenere presente che gli algoritmi hanno praticamente sempre
una complessita piu che lineare e quindi magari ci metto 5min per calcolare
1000 punti e ce ne metto piu di 10 per calcolarne 2000
Nei computer, se prendo tutte le cifre gli ultimi 2 numeri non vogliono dire
niente.
6
CAPITOLO 1.
INTRODUZIONE
Capitolo 2
RIFORMULAZIONI
2.1
Caso Elettrostatico
Teorema 1 ( di Stokes)
Z
s =
r Hd
Z
Jds =
Figura 2.1: Circuitazione
Z
@ l = IT OT
Hd
(2.1)
Figura 2.2: Potenziale
Se H e irrotazionale l'integrale sulla linea e 0, cioe E non dipende dal percorso
ma solo dalla posizione dei punti.
Se r E = 0 in una regione di spazio e se e a connessione lineare semplice(posso prendere una qualsiasi linea chiusa e ricondurla ad un punto senza uscire
da ) allora 9V(x;y;z) : E = rV . V e detto POTENZIALE SCALARE. V non e
univoco:
E = rV
V0 =V +
rV 0 = rV r = rV = E
Quindi V va vincolato; bisogna imporre le condizioni al contorno.
Prendiamo ora l'equazione costitutiva per il caso elettrostatico: D = E .
Applichiamo ad entrambi i membri l'operatore divergenza:r D = r E .
Sapendo dalle equazioni di Maxwell (1.4) che: r D = , e che se siamo in una
regione a connessione lineare semplice E = rV , l'equazione diventa:
r rV = .
Ora se e costante puo uscire dall'operatore divergenza e l'equazione diventa:
2V = .
!
r
r r V = ! r r V =
Questi passaggi sono detti RIFORMULAZIONE, cioe sono passato dalle equazioni
7
8
CAPITOLO 2.
RIFORMULAZIONI
di Maxwell a una formula equivalente che richiede meno calcoli(in questo caso si
passa dal dover trovare Ex , Ey , Ez , Dx, Dy e Dz a dover trovare il solo potenziale
V) o da alcuni vantaggi.
Risoluzione di un esercizio.
Si considerino 2 piani paralleli indenitamente estesi posti alla distanza d: uno
con potenziale V=0 e l'altro con potenziale V=1. Si denisca, poi, un riferimento
cartesiano come da disegno:
2
Se = 0 allora r2V = 0 ! ddxV2 = 0 ! dV
= k1 ! V = k1 x + k2.
dx
Imponendo ora le condizioni al contorno:
8
per x = 0 V = 0 ! k2 = 0
>
>
>
>
>
>
<
per x = d V = 1 ! k1 = d1
>
>
>
>
V = xd ! E = rV = d1
>
>
:
(2.2)
Questo e un caso ideale...nella reala il dielettrico puo non avere la stessa in tutto
il volume e se d non e abbastanza piccolo rispetto alle superci il campo non e
orientato solo secondo x e ci sono degli eetti di bordo.
2.2
Caso Magnetostatico
Teorema 2 ( di Gauss-Green)
Z
=
r Ddv
Z
dv =
Z
@
s =
Dd
Z
dv = Q
(2.3)
Questa rappresenta il usso di D attraverso la supercie @ Se in una certa
regione un certo campo B e solenoidale e la regione e a connessione superciale
semplice allora 9A(x;y;z) : B = r A. A e detto POTENZIALE VETTORE.A non
e univoco difatti:
r A = B
A0 = A + r
r A0 = r A + r A + 0 = r A = B
Gauge: si cerca di vincolare il potenziale vettore, cioe ne cerchiamo uno specico e
cio si traduce nello stabilire r. Si cerca in generale un A tale che r A = 0.
9
Figura 2.3: Dominio
Figura 2.4: Linea di usso
Consideriamo ora una regione a connessione superciale semplice e di essere in
regime quasi-stazionaio magnetico. Dalle equazioni di Maxwell abbiamo:
r H = J
r B = 0, allora 9A(x;y;z) : B = r A
se H = B
r B = J
r r A = J
Se e costantesu tutta r r A = J
Ricordando che:
r r w2= rr2 w r2 2 w r 2 w = @@xw2x ; @@yw2y ; @@zw2z ;
e che si cerca quell'A tale che r A = 0
Inne si ottiene: r 2A = J
2.3
Campo di Corrente
r E = 0
r J = 0
J = E
Se e a connessione lineare semplice
J = r rV = 0
se e costante
r2 V = 0
2.4
Caso Magnetostatico 2D
Il caso magnetostatico 3D richiede il calcolo di un potenziale vettore e quindi e necessario calcolare 3 componenti in ogni punto della regione . Pero molti problemi
hanno uno sviluppo solo in 2D in quanto hanno una dimensione maggiore delle altre
due (Es. campo prodotto da un elettrodotto). In questo caso abbiamo
B = (Bx ; By ; 0) = r A
allora
0
i j k 1 @A @A
@
@
@ A
det @ @x
= i @yz j @xz
@y
@z
0 0 Az
10
CAPITOLO 2.
RIFORMULAZIONI
@Az @Az
B = r (0; 0; Az ) =
;
= f (x; y)
@y @x
A = A(0; 0; A(x;y) ) POTENZIALE VETTORE MONODIMENSIONALE
Il potenziale risulta essere univoco infatti:
x
y
r A = @A
+ @A
+ @A@xx;y = 0 + 0 + 0 = 0
@x
@y
Nel caso bidimensionale J ha solo componente lungo z altrimenti B non totrebbe
stare su un piano e vale solo se non e un tensore che generi componenti di B lungo
z.
r r (0; 0; Az ) = (0;0; r rAz ) = (0; 0; Jz )
@ @Az @ @Az
+ = Jz
@x @x @y @y
r rAz = Jz
se = cost r2Az = Jz
2.5
Condizioni al contorno
Come gia detto in precedenza i potenziali non sono univoci e quindi vanno imposte
le condizioni al contorno. Prendiamo ad esempio l'equazione nel caso elettrostatico
r rV = in una regione a connessione lineare semplice. Indichiamo con @ il bordo di e lo dividiamo in varie parti che chiamiamo @ D (Bordi di Dirichlet) e @ N (Bordi
di Noimann) tali che @ D [ @ N = @ e @ D \ @ N = f;g.
2.5.1
Condizioni di Dirichelet
Imporre le condizioni di Dirichelet signica dare un valore preciso al potenziale nel
punto (x; y):
V (x; y) = VN ota (x; y)
. Come da gura, se condideriamo il caso elettrostatico e prendiamo una equipontenziale V e guardiamo come e direzionato il campo elettrico E , sapendo che
E = rV deduco che Et e nullo per cui imporre le condizioni di Dirichelet sul
potenziale porta ad avere che il campo e tutto normale alla equipotenziale. Nel
caso magnetosatico 2D il campo B risulta essere tangente alla equi-Az .
2.5.2
Condizioni di Newmann
Imporre le condizioni di Newmann signica dare il valore della derivata normale del
potenziale nel punto (x; y):
@V (x; y)
@V (x; y)
=
! rV n = valore
@n
@n
N ota
(x; y) = 0 ho la condizione di Newmann Omogeneo. Nel caso elettrostatico
Se @V @n
imporre la condizione di Newmann omogeneo implica che rV n = 0 quindi E n =
0. Il campo e tangente alla equipotenziale. Nel caso magnetostatico 2D invece ho
rAZ n = 0 quindi risulta che Bt = 0.
11
2.5.3
Infinito riportato al finito
Nei calcolatori non esiste l'innito quindi nei problemi che lo richiedono il bordo
all'innito viene a trovarsi a distanza nita. In questo caso bisogna porre particolare
attenzione nell'imporre le condizioni al contorno. In particolare devo imporle il piu
lontano possibile dalle sorgenti di campo. Es. Se le mie sorgneti e le zone di interesse
stanno in una circonferenza di raggio r allora l'innito riportato al nito dovrebbe
stare a 5-10 r. In generale si varia la distanza del bordo e se ne vede l'inuenza. Se
i risultati non cambiano molto allora posso ritenere che le mie condizioni di innito
riportate al nito non comportano errori rilevanti.
2.5.4
Simmetrie e antisimmetrie
In molti casi per ridurre i costi computazionali si possono sfruttare le simmetrie e
le antisimmetrie degli oggetti in esame. Dell'oggetto in gura 2.5 si puo ad esempio
considerare solo un quarto della gura. Nasono pero dei nuovi bordi (in rosso) in cui
bisogna inserire le condizioni al contorno. Occorre allora avere un'idea qualitativa
della soluzione i modo da imporre le condizioni appropriate.
Figura 2.5:
Problema Elettrostatico
Condizioni di Dirichelet V=cost
E = rV , Etan = 0, E e tutto normale.
Figura 2.6: Andamento campo (a)
12
CAPITOLO 2.
RIFORMULAZIONI
Condizioni di Newmann omogeneo @V
@n
rV n = 0, E n = 0, En = 0, E e
tutto tangente.
Figura 2.7: Andamento campo (b)
Condizioni di Dirichelet Az =cost
Bn = 0, B e tangente
Figura 2.8: Andamento campo
Problema Magnetostatico
Riprendendo allora la gura 2.5 si puo dedurre che la distribuzione di E , V e delle
linee di campo e quella mostrata in gura 2.10
Se allora ai bordi creati sfruttando la simmetria imponiamo le condizioni di
Newmann omogeneo otteniamo un problema equivalente e ben posto.
2.5.5
Altri casi di simmetrie
In questi casi si riescono ad imporre le condizioni sugli assi e rimane il dubbio
su cosa mettere sul bordo esterno (in rosso). Se il bordo viene messo ad una certa
distanza(innito riportato al nito) mettere Dirichelet o Newmann non fa dierenza,
ma solitamente si mette Dirichelet. In gura 2.12 i due bordi di Dirichelet devono
essere posti uguali altrimenti avrei campo anche con correnti nulle.
2.6
Conclusioni
I tre problemi
Elettrostatico
r rV = Campo di Corrente
r rV = 0
Magnetostatico 2D
r rAz = Jz
13
z;
B = r (0; 0; Az ) = ( @A
@y
Figura 2.9: Relazione Rotore - Gradiente
; 0),
mentre@Vper @Vil campo elettrico era
rV = ( @x ; @y ; 0). Il rotore in 2D e
uguale al gradiente ruotato di 90° in
senso orario. Risulta quindi che
imponendo Newmann omogeneo
z
= 0 ) risulta Btan = 0.
( @A
@n
@Az
@x
Figura 2.10: Andamento qualitativo dei campi
sono riconducibili ad un un problema del tipo
r r = Se si riesce a risolvere questa equazione sono in grado di risolvere i tre problemi
precedenti. Rimane comunque ancora fuori il caso magnetico 3D che ha equazione
r r A = J. Nel prossimo capito si vedra come riformulare questa equazione
e poter risolvere il problema con dei potenziali scalari invece che con il potenziale
vettore.
14
CAPITOLO 2.
RIFORMULAZIONI
Figura 2.11: Problema iniziale
Figura 2.12: Problema semplicato
Figura 2.13: Problema iniziale
Figura 2.14: Problema semplicato
Capitolo 3
CASO MAGNETOSTATICO
3D CON IL POTENZIALE
SCALARE
Nel capitolo precedente abbiamo visto una riformulazione per il caso magnetostatico
3D che ci ha portato ad avere r r A = J. Ora questa riformulazione non
si presta ad essere trattata con il metodo delle dierenze nite. Cambiando tipo di
approccio e non partendo dall'induzione ma dal campo magnetico si puo ottenere
un'altra formulazione.
3.1
Potenziale scalare ridotto
Teorema 3 (di Helmmolth) Un campo vettoriale
H , sotto opportune ipo-
tesi riguardanti la topologia, pu
o essere scritto come somma di un campo
irrotazionale e di un campo solenoidale.
H = H irr + H sol
Da cui
se r H irr = 0 9 : H irr = r
se r H sol = 0 9w : H sol = r w
e quindi possiamo scrivere:
H = r + r w
(3.1)
Teorema 4 (di Biot-Saval)
1 Z J r dr
(3.2)
4 r 3
Questo teorema permette di determinare il campo magnetico in tutto lo spazio.
L'integrale puo esssere dicile da calcolare analiticamente, ma posso calcolarlo per
via numerica in modo abbastanza agevole e = cost e in generale 0 (bobina
di conduttore non magnetico). Ora se nello spazio io aggiungo un pezzo di ferro il
campo magnetico cambia. Quindi
H = Campo se avessi tutto a 0 +Termine che dipende dai materiali ferromagnetici
H (x;y;z) =
15
CAPITOLO 3.
CASO MAGNETOSTATICO 3D CON IL POTENZIALE
16
Ora avendo dalle equazioni di Maxwell:
SCALARE
r H s = J
Applichiamo la divergenza ad H s, otteniamo:
Z
r Hs(x;y;z) = r 41 J r3 r dr = 0
nel caso stazionario. Quindi H s e un campo solenoidale. Allora
H = H irr + H sol
= r + H s
(3.3)
e detto POTENZIALE MAGNETICO SCALARE RIDOTTO. E' Ridotto perche
facendono il gradiente ottengo solo Hirr e non tutto il campo magnetico H . Ora
provando a riscrivere l'equazione di Maxwell otteniamo:
rH = Jr(H s r) = JrB = 0rH = 0r(H s r) = 0rr = r(H s )
(3.4)
Se fosse costante avrei r H s = 0. Ma non e costante quindi devo calcolare
il termine di sorgente r H s. Puo essere complicato da calcolare ma con metodi
numerici lo si puo trovare.
3.2
Potenziale scalare totale
Il metodo precedente ha un problema. Facendo riferimento alla g. 3.1:
Figura 3.1: Fenomeno cancellazione
Consideriamo jB j = 1T ,tutto normale all'interfaccia, e prendiamo poi due punti a
cavallo dell'interfaccia tra aria e Ferro.
B (A) = B (A0 )
0 H0 = 0 r HF e
H
HF e = 0
r
Ora ho HA HA se non avessi il ferro e HA = HAr da cui ne consegue che in
presenza di ferro
jrj jH s j
0
0
17
che e noto come fenomeno di cancellazione. Infatti H s e noto in modo abbastanza
esatto mentre e noto con un certo errore che e ancora maggiore sul gradiente.
Quindi potrei o sovrastimare il gradiente e cancellare piu del dovuto ad Hs oppure potrei avere il contrario e ottenere comportamenti non sici come mostrato in
gura 3.2. Prendendo in esame le seguenti gure Se F e e a connessione lineare
Figura 3.2: Fenomeno non sico
Figura 3.3: Regiore a connessione lineare semplice
Figura 3.4: Regione non a connessione lineare semplice
semplice (g. 3.3) e r H = 0 allora 9 : H = r . e detto POTENZIALE
MAGNETICO SCALARE TOTALE.
Se non ci si trova in una regione a connessione
= I = 0 allora posso introdurre il potenzilale ,
lineare semplice (g. 3.4) e R Hdl
altrimenti devo usare il potenziale ridotto e fare attenzione al problema della cancellazione.Quindi a seconda del mio dominio e degli elementi che vi appartengono
il mio programma di calcolo deve adottare metodi di calcolo diversi (g. 3.5). In
18
CAPITOLO 3.
CASO MAGNETOSTATICO 3D CON IL POTENZIALE
SCALARE
Figura 3.5: Casi di utilizzo dei potenziali parzile e totale
particolare alle interfacce tra i vari sottodomini deve conservarsi Ht e quindi:
H t = Ht
( r ) t = ( r + H s) t
Ne consegue che e sono legati. Da parte di chi usa il programma questa e
la soluzione migliore, mentre da parte di chi deve programmare e l'approccio piu
complicato da implementare.
Capitolo 4
CASO MAGNETICO
QUASI STAZIONARIO
4.1
Problema Tridimensionale
Nel caso magnetico stazionario avevamo che @@tB = 0 mentre nel caso magnetico
quasi-stazionario abbiamo l'eetto di induzione trasformatorico per cui @@tB 6= 0.
Le equazioni da cui partire sono:
r B = 0
(4.1)
r E = @@tB
(4.2)
r H = JT
(4.3)
B = H
(4.4)
J = E
(4.5)
Figura 4.1: Corrente Indotta
Figura 4.2: Eetto pelle
In gura 4.1 abbiamo l'induzione di correnti sulla barretaa dovute alla corrente
variabile i(t) mentre in gura 4.2 se E e costante la corrente si distribuisce uniformemente, se invece fosse variabile nel tempo avrei l'eetto pelle. In generale
possiamo quindi considerare che JT = Jstaz + Jeddy .
Poi abbiamo che r B = 0 e se sono vericate le condizioni topologiche possiamo
usare il potenziale vettore, quindi B = r A. Prendendo poi la 4.2:
r E = @@tB = @ r@t A = r @@tA
19
20
CAPITOLO 4.
CASO MAGNETICO QUASI STAZIONARIO
0
1
C
@A C
)rB
@E + @t A
B
| {z }
rV
) E = @@tA rV
Sostituendo poi nella 4.5 otteniamo
J = =
Per cui la riformulazione diventa
|
@ A
@t
rV
@ A
rV
| {z }
{z@t}
Jeddy
Jstaz
r r A + @@tA = Js
4.2
devo ssare il potenziale es. r A = 0
devo garantire r JT = 0 cioe r @@tA + rV = 0
Problema Bidimensionale
Il problema tridimensionale quasi stazionario risulta particolarmente complicato.
Esistono comunque situazioni in cui il problema puo essere ricondotto ad uno studio
bidimensionale. in queso caso avremo:
A = (0; 0; Az )
Js = (0; 0; Jz )
V = (0; 0; Vz )
Allora partendo dall'equazione
Az
r rAz + @@t
= Jsz
(4.6)
posso fare alcune considerazioni. Come visto nel caso magnetostatico 2D r A =
0 e implicitamente vericata. Poi sulla sezione
e
generica xy si ha che il gradiente @ A
costante e si puo dimostrare che r @t = 0 e sempre vericata. Quindi il potenziale risulta essere univoco. Per risolvere il problema devo imporre le condizioni
al bordo e devo conoscere A in tutti i punti all'istante 0 .(Generalmente si fanno
partire le grandezze all'istante t=0 e quindi A = 0 per t = 0 ). Spesso capita che
le correnti siano sinosuidali quindi ho vari casi:
, B , A sono sino Se le sorgenti sono sinosuidali e i materiali sono lineari, H
suidali e posso usare i fasori a regime.
, B , A sono
Se le sorgenti sono sinosuidali e i materiali non sono lineari,H
periodici ma non sinosuidali
21
Se le sorgenti sono periodiche ma non sinosuidali e i materiali lineari, posso
scomporre in serie di Fourier, studio singolarmente le armoniche e poi sommo
i risultati nel dominio del tempo.
Negli altri casi devo risolvere nel dominio del tempo.
Per lavorare con i fasori bisogna riscrivere l'equazione.
Una regola veloce per la
scrittura consiste nel fare le sostituzioni: C ! C_ , @t@ ! j!. Per cui la 4.6 a regime
diventa:
r rA_ z (x; y) + j!A_ z (x; y) = J_sz (x; y)
(4.7)
Se invece vogliamo applicare la trasformazione
Az (x; y; t) = Az (x; y)cos(!t + (x; y))
(4.8)
= Re fnA(x; y) [cos(!t +o (x; y)) + jsen(!t + (x; y))]g
= Re A(x; y)ej(!t+)
= Re nA(x; yo)ej!t ej _ j!t
= Re Ae
(4.9)
Lo stesso ragionamento si puo applicare alla forzante:
n
o
_ j!t
Jsz (x; y; t) = Re Je
(4.10)
Allora possiamo riscrive la 4.6 in termini fasoriali:
n
o
n
o
n
o
_ j!t = Re Je_ j!t
_ j!t + @ Re Ae
(4.11)
r rRe Ae
@t
n
o
_ j!t + j!Ae
_ j!t Je_ j!t = 0
Re r rAe
(4.12)
n
o
Re [ r rA_ + j!A_ J_]ej!t = 0 8 t
(4.13)
r rA_ + j! A_ J_ = 0
(4.14)
che porta inne a
(4.15)
_
_
_
r rAz + j!Az = Jz
(4.16)
22
CAPITOLO 4.
CASO MAGNETICO QUASI STAZIONARIO
Capitolo 5
DIFFERENZE FINITE
Fino ad ora ci siamo limitati a riformulare le equazioni di Maxwell attraverso dei
passaggi che ci hanno condotto a formule piu semplici. Per risolvere queste equazioni
algebrico-dierenziali ci sono vari metodi. In questo capitolo analizzeremo il Metodo
delle Dierenze Finite.
5.1
Considerazioni sul dominio
Consideriamo l'equazione r rV = (abbiamo visto come ricondursi a questa
formula anche per gli altri casi). Ora consideriamo COSTANTE (cioe non funzione
di x, y, z),l'equazione diventa r2V = ; ora se = 0 abbiamo r2V = 0.
Consideriamo ora che il dominio sia di forma quadrata e che l'equazione da
risolvere sia r2V = 0 e imponiamo le condizioni al contorno Otteniamo il disegno
mostrato in gura:
Figura 5.1: Dominio Ora si suddivida il dominio in un reticolo equispaziato di passo a sia lungo x che
lungo y come mostato in gura:
Ora ho un reticolo formato da i colonne e j righe. Nelle intersezioni del reticolo
ho i nodi in cui vado a calcolare il potenziale V. Piu tto e il reticolo piu nodi
ho e quindi migliore e la mia conoscenza del potenziale, pero questo inuisce sulla
memoria e sul tempo di calcolo.
23
24
CAPITOLO 5.
DIFFERENZE FINITE
Figura 5.2: Reticolo
5.2
Risoluzione Equazione di Laplace
Consideriamo quindi il punto (i,j) e i suoi punti vicini a destra, sinistra, in alto e
in basso. Sviluppiamo in serie di Taylor il potenziale V dei nodi vicini con centro
nel punto (i,j).
Vi+1;j = Vi;j + a
Vi
1;j
= Vi;j
a
Vi;j +1 = Vi;j + a
Vi;j
1
= Vi;j
a
@V
a2 @ 2 V
a3 @ 3 V
4
j
j
i;j +
i;j +
2
@x
2 @x
6 @x3 ji;j + o(a )
@V
a2 @ 2 V
j
i;j +
@x
2 @x2 ji;j
@V
a2 @ 2 V
a3 @ 3 V
4
j
j
+
i;j +
i;j
@y
2 @y2
6 @y3 ji;j + o(a )
a2 @ 2 V
@V
j
i;j +
@y
2 @y2 ji;j
Sommando ora le equazioni otteniamo
Vi+1;j + Vi
a3 @ 3 V
4
6 @x3 ji;j + o(a )
2
1;j + Vi;j +1 + Vi;j 1 = 4V i; j + a
a3 @ 3 V
4
6 @y3 ji;j + o(a )
2
@V
Indichiamo il primo termine con Vi;j+ e trascuriamo o(a4):
V+
i;j
4Vi;j +
a2
2
@V
@2V
j
+
j
i;j
@x2
@y2 i;j
Vi;j+ 4Vi;j + a2 r2 V
2
j + @ V j + o(a4 )
@x2 i;j @y2 i;j
(5.1)
Dovendo risolvere l'equazione r2 V = 0 la (5.1) diventa:
Vi;j =
Vi;j+
4
(5.2)
25
Il potenziale risulta essere la media dei potenziali vicini. Potrei scegliere anche altri
punti per fare la media oppure sceglierne di piu e avrei una media piu dolce ma
otterrei una matrice meno sparsa e quindi aumenterei l'onere computazionale.
Consideriamo ora gli N nodi totali;
per tutti questi consideriamo quazioni del tipo
(5.2) che estesa diventa Vi;j 14 Vd 41 Vs 41 Va 14 Vb = 0.
Ottengo un sistema di N equazioni in N incognite e la matrice A risulta essere
simmetrica.
[A]fV g = fbg
(5.3)
La matrice A rappresenta la versione discreta del laplaciano (r2)
Il vettore V delle incognite e la versione discreta dell'incognita
Il termine noto b e la versione discreta dei termini noti
Se non impongo le condizioni al contorno l'unica soluzione e quella nulla.
Su ogni riga ho cinque coecienti non nulli:
(i; j ) = 1 in diagonale
(i + 1; j ), (i 1; j ), (i; j + 1), (i; j 1) = 41 fuori diagonale
La posizione dei coecienti non in diagonale dipende dalla numerazione del reticolo.
Se numero ordinatamente i nodi spazialmente vicini, questi avranno numerazione
vicina e nella matrice A i termini fuori diagonale risuotano vicini alla diagonale
principale.
5.2.1
Coefficiente di sparsità di riga (c.s.r)
numero di non zeri per riga (n.n.z.r.) = 5
numero di coe. nella riga (n.c.r) N
Tante piu incognite ho, piu la matrice risulta essere vuota.
c:s:r =
5.2.2
Coefficiente di sparsità globale (c.s.g)
numero di non zeri globale (n.n.z.g.) = 5N = 5
numero di coe. globale (n.c.g)
N2 N
Ho molti zeri quindi si puo immagazzinare la matrice sparsa con meno memoria
utilizzando alcuni metodi di Storage compatto.
c:s:g =
5.2.3
Storage compatto
Ci sono vari metodi per immagazzinare le matrici sparse. Uno ad esempio e il metodo Triade che consiste nell'immagazzinare l'indice di riga, l'indice di colonna e il valore dei coeecienti non nulli. Un esempio del metodo e dato in tab. 5.1: Prendendo
il nostro caso abbiamo 5 N coecienti non nulli, quindi lo spazio occuparo dalla
matrice sara 2(5N )Num. byte intero+(5N )Num. byte doppia precisione. Tutti
26
CAPITOLO 5.
ir
ic
DIFFERENZE FINITE
V
7 5 2:33
9 12 2:40
10 10 3:00
12 12 3:50
Tabella 5.1: Metodo Triade
gli altri coecienti sono zero quindi non li immagazzino. Se dovessi immagazzinare
tutta la matrice avrei una memoria pari a (N N ) Num. byte doppia precisione.
Con il metodo triade la memoria cresce linearmente con il numero di incognite
mentre con i metodi tradizionali crescerebbe quadraticamente.
5.3
5.3.1
Condizioni al contorno
Bordo di Dirichelet
Consideriamo che il nodo (i,j) sia un nodo di bordo in cui vogliamo imporre la
condizione di Dirichelet. Supponiamo inoltre che tale nodo abbia numerazione
globale (7)(g. 5.3), quindi V7 = VD . Questa imposizione comporta delle modiche
alla matrice A e al termine noto nel sistema (5.3).
Figura 5.3: Bordo di Dirichelet
L'equazione del nodo (X) risulta essere:
VX
1 V7 1 Vdx 1 Valto 1 Vbasso = 0
4 4
4
4
Ora il termine V7 e noto per cui aggiungo 41 V7 a termine noto e metto zero al
suo posto nella colonna 7 della matrice A. Questo1 signica mettere a zero tuttaVla
colonna 7 e nelle righe dove avevo i coecienti 4 (es. riga 2, 5, 9)aggiungere 4D
a termine noto. Un'altra modica da eettuare consiste nel modicare l'equazione
del nodo (27) in quanto e noto. Quindi bisogna azzerare tutti i coeecienteti della
matrice A nella riga 27, mettere un 1 in diagonale e imporre a termine noto il
27
valore VD . Si passa da
2
6
6
6
6
6
6
6
6
6
6
6
6
6
6
4
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
1
4
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
1
4
x
x
x
x
x
x
x
x
x
x
x
x
x
x
1
4
x
x
1
4
x
1
x
1
4
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
1
4
x
x
x
x
x
x
x
x
x
x
x
x
x
32
76
76
76
76
76
76
76
76
76
76
76
76
76
76
54
x
x
x
x
x
x
x
x
x
x
3
7
7
7
7
7
7
7
7
7
7
7
7
7
7
5
0 x x x3 2 x 3
6
0 x x x 77 66 x 77
6
6
0 x x x 77 66 x 77
6
6
0 x x x 77 66 x V 77
6
6
0 x x x 77 66 x + 4D 77
6
6
0 x x x 77 66 x 77
6
6 0 0 0 0 0 0 1 0 0 0 7
6
VD 7
7
6
6
7
6
6 x x x x x x 0 x x x 7
x 7
7
6
6
7
4
4 x x x x x x 0 x x x 5
x 5
x x x x x x 0 x x x
x
Questo imposizione e di tipo forte perche riesco ad imporre esattamente il valore
del potenziale.
2
5.3.2
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
Bordo di Newmann
Per imporre le condizioni di Noimann bisogna introdurre dei nodi ttizzi, che non
appartengono al dominio , come mostrato in gura 5.4.
@V
V = Vd Vs = 0 ) Vd = Vs
j
@x
x
2a
0
0
Figura 5.4: Bordo di Newmann
I nodi dei potenziali ausiliari sono detti potenziali
immagine e mi portano nuove
incognite. Devo aggiungere colonne e mettere 14 per ogni nodo immagine inoltre
devo aggiungere le righe con le equazioni
Vd Vs = 0
Questo imposizione e di tipo
debole perche e data come media. Nella soluzione
nale potrebbe essere che @V
=
6
0. Sarebbe vero se il passo a fosse un innitesimo.
@n
0
28
5.4
CAPITOLO 5.
DIFFERENZE FINITE
Risoluzione Equazione di Poisson
Consideriamo ora la risoluzione dell'equazione di Poisson lasciando inalterate le
altre condizioni poste. Quindi partendo da
r2 V = e applicando lo stesso metodo usato per l'equazione di Laplace (5.2) si ottiene:
Vi+1;j + Vi+1;j + Vi+1;j + Vi+1;j = 4Vi;j + a2 r2 V ji;j
Vi;j+ = 4Vi;j
i;j
2
a i;j
4 a2
1 +
4 Vi;j =
Quindi per introdurre l'equazione di Poisson basta modicare il solo termine noto.
Vi;j
5.5
Dominio non quadrato
Molti dei problemi non hanno dominio quadrato vediamo ora se e possibile adattare
il metodo delle dierenze nite a domini di forma non quadrata. Consideriamo il
disegno in gura 5.5 : I punti che eccedono dal bordo del domino li traslo e li
Figura 5.5: Bordo di dominio non quadrato
porto sul bordo. ora i bracci avranno lunghezza k a lungo y e h a lungo x, con
0 < h; k < 1. Scriviamo lo sviluppo in serie per i due nodi ke stanno sull'asse x:
Vi+1;j = Vi;j + ha
@V
h2 a2 @ 2 V
h3 a3 @ 3 V
4
j
j
i;j +
i;j +
2
@x
2 @x
6 @x3 ji;j + o(a )
a2 @ 2 V
@V
a3 @ 3 V
4
a ji;j +
j
i;j
2
@x
2 @x
6 @x3 ji;j + o(a )
= Vi;j
Ora sommando i termini le derivare del primo e terzo ordine non mi spariscono
piu. Se divido la prima equazione per h riesco a far sparire la derivata prima ma
mi rimane ancora la derivata terza. Per andare avanti devo quindi accettare una
precisione minore e fermarmi al termine o(a3 ). Quindi le equazioni diventano:
1 Vi+1;j = 1 Vi;j + a @V ji;j + ha2 @ 2 V ji;j + o(a3)
h
h
@x
2 @x2
Vi
1;j
Vi
1;j
= Vi;j
a
@V
a2 @ 2 V
3
j
i;j +
@x
2 @x2 ji;j + o(a )
29
Sommando ora le equazioni si ottiene:
1 Vi+1;j + Vi 1;j = h + 1 Vi;j + (h + 1) a2 @ 2 V ji;j + o(a3)
h
h
2 @x2
Dividendo ambi i membri per (h + 1) si arriva a:
Vi+1;j
Vi 1;j
1 Vi;j + a2 @ 2V ji;j + o(a3 )
+
=
h(h + 1) (h + 1) h
2 @x2
Applicando gli stessi passaggi anche lungo k si ottiene:
Vi+1;j
Vi 1;j
1 Vi;j + a2 @ 2 V ji;j + o(a3)
+
=
k(k + 1) (k + 1) k
2 @y2
Sommando le equazioni lungo x e lungo y:
Vi+1;j
Vi 1;j
Vi+1;j
Vi 1;j
1
1
a2
+
+
+
=
+
Vi;j + r2 V ji;j
h(h + 1) (h + 1) k(k + 1) (k + 1)
k h
2
Posso usare questo metodo per allargare o restringere il passo del reticolo. Se non
faccio attenzione pero l'inttimento in una zona si propaga anche dove non mi serve
generando punti di non interesse. (g. 5.6)
Si puo ovviare al problema decidendo di interrompere le linee all'interno del dominio
come mostrato in gura 5.7. Si genera cos un nodo ttizzio Vsinistra e risulta quindi:
Figura 5.7: Interruzione Linee
Figura 5.6: Propagazione Reticolo
Vi;j
1 Vdestra 1 Valto 1 Vbasso 1 Vsinistra = forzante
4
4
4
4
Vsinistra non fa parte delle mie incognite quindi lo scrivo come media dei nodi vicini
e diventa:
1
1
1
1
Vsinistra = Vn1 + Vn2 + Vn3 + Vn4
4
4
4
4
30
5.6
CAPITOLO 5.
DIFFERENZE FINITE
Caso magnetico quasi stazionario con il potenziale vettore monocomponente
L'equazione generale e:
z
r rAz + @A
= Jsz
@t
(5.4)
Per usare il metodo delle dierenze nite = 1 deve essere costante sul dominio e
quindi la (5.4) diventa:
z
r2 Az + @A
= Jsz
(5.5)
@t
Consideriamo un dominio quadrato e che la forzante sia pari a zero visto che abbiamo visto precedentemente come trattare i domini non quadrati (parg. 5.5) e con
forzanti diverse da zero (parg. 5.4).
Ne risulta che l'equazione da trattare e:
z
r2 Az + @A
=0
@t
Rispetto a prima abbiamo anche una derivata temporale quindi indichiamo con
Ai;j;k il potenziale vettore monocomponente nel nodo (i; j ) all'istante di tempo k.
Sviluppiamo quindi il potenziale in serie di Taylor centrato in Ai;j;k :
Ai
1;j;k
+ Ai+1;j;k + Ai;j
1;k
+ Ai;j+1;k = 4Ai;j;k + a2 r2Aji;j
A+i;j;k = 4Ai;j;k a2 Il tutto diventa:
Ai;j;k +
In termini matriciali abbiamo:
A+i;j;k
@A
j
@t i;j;k
a2 @A
4 @t ji;j;k = 0
4
[M ] fAg + [M2]
@A
@t
= fg g
(5.6)
La (5.6) rappresenta un sistema
algebrico dierenziale. Ho il problema di avere
il doppio delle incognite (A; @A
) rispetto alle equazioni. Devo quindi discretizzare
@t
anche la derivata:
@A
j Ai;j;k+1t Ai;j;k = 0
@t i;j;k
A+i;j;k
4 + Ai;j;k
a2 Ai;j;k+1 Ai;j;k
4
t
=0
t
Deniamo r = a2
, e moltiplichiamo tutto per 4r, risulta:
rA+i;j;k + 4rAi;j;k
(Ai;j;k+1
Ai;j;k ) = 0
Ai;j;k+1 = (4r + 1)Ai;j;k rA+i;j;k
31
che in termini matriciali possiamo scrivere:
fAk+1 g = [P ]fAg
Il valore dell'incognita dipende da qualcosa che succedeva all'istante precedente.
L'equazione e scritta in forma espicita e non devo risolvere un sistema ma solo un
prodotto matrice-vettore che e agevole perche P e sparsa. Che il sistema risulti
esplicito e dovuto alla particolare scelata della discretizzazione della derivata; con
altre scelte avremmo ottenuto un sistema implicito e avrei dovuto risolvere un
sistema per ogni istante temporale.
La matrice P e caratterizzata dall'avere un coeciente (4r + 1) sulla diagonale e
coecienti r fuori diagonale in corrispondenza dei nodi vicini.
5.7
Stabilità e accuratezza
I metodo illustrato puo dare origine a dei problemi di inacuratezza o instabilita.
Entrambi dipendo in generale del passo temporale di discretizzazione. Il problema
di inacuratezza signica che la mia soluzione qualitativamente e giusta ma i valori
numerici si discostano abbastanza da quelli giusti, mentre i problemi di instabilita
mi portano a trovare delle soluzioni che non hanno nessun legame con la soluzione
"vera". L'instabilita del sistema dipende dalla matrice P ed in particolare dal raggio
spettrale di P. rappresenta il modulo del vettore di massimo modulo essendo
gli autovalori di P in generale numeri complessi.
> 1 amplico le oscillazioni
< 1 smorzo le oscillazioni
Il raggio spettrale dipende dai coecienti della matrice P e in particolare dipende
da r. Se r e piccolo allora anche risulta piccolo. Questo e un sistema condizionatamente stabile perche devo vericare il raggio spettrale. Ci sono dei sistemi invece
che sono incondizionatamente stabili cioe sono stabili in qualunque caso.
Figura 5.8: Inacuratezza
Figura 5.9: Instabilita
32
CAPITOLO 5.
DIFFERENZE FINITE
Capitolo 6
METODO THETA
Nel capitolo precedente abbiamo visto ome il metodo delle dierenze nite porti ad un sistema algebrico dierenziale in forma esplicita che permette al metodo di non dover risolvere per ogni istante temporale un sistema algebrico, ma
condizionatamente stabile.
6.1
Metodo Theta
Partiamo dall'espressione:
[M1]fxg + [M1 ]fx_ g = fgg
ora isolando il vettore delle derivate
fx_ g = [M2 ] 1 [fgg [M1 ] fxg]
ora chiamiamo per semplicita poniamo
f (fxg) = [M2 ] 1 [fgg [M1 ] fxg]
ora integrando ambo i membri avremo le soluzioni. Il problema e che abbiamo
l'inversa. Per ora tralasciamo questa nota continuiamo come se questo non fosse un
problema e integriamo
Z tn+1
tn
x_ (t)dt =
Z tn+1
tn
f (x(t))dt
il risultato ricordando il teorema del valore medio risulta essere
xn+1 xn = tf (t )
xn+1 xn = t(fn+1 + (1 )fn )
con 0 1 che mi permette di pesare in modo diverso li estremi. Se f e lineare
nell'intevallo [tn+1; tn] e = 0 integro esattamente. Se t e piccolo considerarela
funzione lineare nell'intervallo e un'ipotesi ben posta.
A questo punto rimane da risolvere la questione dell'inversa. Dobbiamo vedere se
esiste un modo che ci consenta di non calcolare l'inversa.
x_ = [M2 ] 1 [fgg [M1 ] fxg]
1 (g
1 ) + (1 )M 1 (g
1
xn+1 xn = t[M2 n+1
M1 n+1
(6.1)
n+1
2 n n M1 n )]
33
34
CAPITOLO 6.
METODO THETA
M2 in generale potrebbe dipendere dal tempo, pero se non cambiano nel tempo
i parametri dei1 materiali1 e t e piccolo rispetto
alle vaiazioni, allora M2n+1 u
1 = M 1 = M 1 e premoltiplico
M2 n =) M2 n+1 u M2 n Considero quindi M2 n+1
2n
2
la 6.1 per M2 cos da far sparire l'inversa.
L'equazione diventa cos
M2
t (xn+1 xn) = [(gn+1 M1n+1xn+1) + (1 )(gn M1 nxn)]
Raggruppando l'istante n + 1 a destra e l'istante n a sinistra otteniamo
M2
M2
t + M1n+1 xn+1 = t + (1 )M1n xn + gn+1 + (1 )gn
Per risolvere devo conoscere xn, gn+1 e gn all'istante n = 0.
In forma compatta otteniamo
Nxn+1 = bn dubbio ??
Se M1 e M2 sono sparse anche N e sparsa. Il problema e che ad ogni istante temporale devo risolvere un sistema algebrico.
Se = 0 e M2 e diagonale allora anche N e diagonale ad ogni istante temporale
non devo risolvere un sistema algebrico.
Per = 0 il metodo1 e detto "Eulero indietro", Per = 1 il metodo e detto "Eulero
concerne la stabilia
avanti" e per = 2 il metodo e detto "Nicholson". Per quanto
i metodi theta sono condizionatamente
stabili
per
0
12 mentre sono incondizionatamente stabili 21 < 1. Il metodo piu accurato e quello con = 12 , pero e
condizionatamente stabile. In genere di rinuncia a un po di accuratezza per avere1
un metodo incondizionatamente stabile e quindi si prente un po piu grande di 2 .
Il prezzo da pagare per avere accuratezza e stabilita incondizionata e che ad ogni
istante temporale ho un sistema algebrico da risolvere.
6.2
Risoluzione dei circuiti con il metodo theta
Una delle applicazioni del metodo Theta e la risoluzione dei cicuiti elettrici. Riprendiamo qualche nozione di elettrotecnica:
grafo connesso: Posso aggiungere ogni nodo attraverso i lati del grafo
grafo orientato (o digrafo): grafo che a un orientamento convenzionale
Dal digrafo posso creare la matrice A di incidenza. Essa si ottiene per righe mettendo 1 nei lati convenzionalmente entranti nel nodo e -1 nei nodi uscenti. Per i
lati non direttamente connessi si mette 0. La matrice avra n righe e l colonne. Le n
equazioni non sono indipendenti, pero eliminandone una si ottenono n-1 equazioni
linearmente
indipendenti.
ARn 1l =. Questa e detta matrice di incidenza ridotta.
AR e una base del mio sistema: Ai = 0 legge di Kirko per le correnti. Ho 2l
incognite: v e i, dalle LKC ho n-1 equazioni, dalle LKT ottengo l-(n-1) equazioni(l lati di albero, n-1 lati di coalbero), dalle equazioni degli l componenti ottengo l
equazioni quindi ho 2l equazioni in 2l incognite. Per l'analisi al calcolatore conviene
uilizzare i potenziali nodali e abbiamo:
AT e = v
ATln 1 en 11 = vl1
35
Quindi le leggi di kirko si possono scrivere
AT e v = 0
Ai = 0
Ora ho come incognite v, i, e e (2l+n-1) equazioni. Ho piu equazioni di prima ma
sono piu semplici da usare.
P
P
Teorema 5 (di Tellegen)
v i = 0 vT i = (AT e)T i = eT AT T = eT Ai = 0
6.2.1
Regime stazionario
Nel caso stazionario abbiamo:
2
4
6.2.2
Rll i + Gll v = fl
1 0 AT
0 A 0
G R 0
38
<
5
:
v
i
e
9
=
;
8
<
=:
0
0
f
9
=
;
Componenti
RESISTENZA
v = Ri
vk = Rkk ik
Rkk ik vk = 0
Rkk = Rk resistenza del lato k
Gkk = 1
fk = 0
i = Gv ik = Gkk vk
ik Gkk vk = 0
Gkk = 1
Gkk = Gk conduttanza del lato k
fk = 0
GENERATORE DI TENSIONE
Rkk = 0
Gkk = 1
fk = Vk
GENERATORE DI CORRENTE
Rkk = 1
Gkk = 0
fk = Ik
Si possono anche introdurre i generatori pilotati e si possono rappresentare anche i
doppi-bipoli.
6.2.3
Analisi Nodale(non modificata)
In questo metodo consideriamo di avere solo generatori di corrente e resistori.
Gv + 1i = f
36
CAPITOLO 6.
METODO THETA
. La soluzione del problema si ottiene aggiungendo le equazioni di Kircho
8
i = f Gv
>
>
>
>
>
>
<
Ai = 0
(6.2)
>
>
>
T
>
A e=v
>
>
:
La risoluzione del sistema diventa allora
Af
AGv = 0
AGv = Af
AGAT e = Af
Questo metodo mi permette di trovare i potenziali nodali avendo meno incognite(
i potenziali sono n-1) ma la matrice e meno sparsa. Nell'analisi nodale modicata
nei nodi dove ho generatori di tensione aggiungo delle incognite ttizie e le relazioni
di legame.
6.2.4
Regime variabile
Nel regime variabile le LKC e LKT sono le stesse ma cambiano le equazioni di
componenti.
dv
di
Gv + Ri + L + C = f
dt
dt
In forma matriciale diventa
9 2
8
9 8
9
2
38
0 0 03d<v= <0=
1 0 AT < v =
4 0
i = 0
A 0 5 i +4 0 0 0 5
C L 0 dt : e ; : f ;
G R 0 : e ;
Questo e un sistema algebrico dierenziale del tipo:
[M1]fxg + [M2 ]fx_ g = fgg
che puo essere risolto con il metodo Theta.
M2 1 n+1 = M2 1 n =) M2 n+1 = M2 n =) C ed L non devono dipendere dal tempo
In caso di guasto vicino ai generatori l'induttanza varia molto rapidamente , cresce
I mentre il usso non cresce (saturazione) quindi L decresce e non posso applicare
il metodo.
Se voglio conoscere la soluzione a regime
[M1]fxg + [M2 ]fxg = fgg
che in notazione simbolica posso scrivere
M1 x + j!M2 x = g
[M1 + j!M2]x = g
che e un'equazione lineare a coecienti complessi
M x = g
x = M 1 g
37
6.3
Parametri dei materiali che variano da punto
a punto
Se i parametri dei materiali variano da punto a punto il metodo delle dierenze nite
non va piu bene in quanto per raggiungere l'equazione di laplace si era ipotizzato
che , e fossero costanti.
Inoltre il metodo non mi permette di determinare bene l'andamento dei campi.
E = @V ; @V u V ; V
@x @y
x y
In gura 6.1 si puo notare che se si conosce il potenziale nei nodi poi non si riesce
Figura 6.1: Andamento Campo
a determinarne l'andamento all'interno: potrebbe essere lineare (blu) o ad arco
(arancio) Un'altro prob e illustrato in gura 6.2 in cui si nota che introducendo le
barre di errore ipotizzando un andamento lineare potrei completamente sbaliare la
soluzione.
Figura 6.2:
Solo nella fase i post-processing posso fare ipotesi ragionevoli su come vari il
poteziale perche nel programma non ho impostato un andamento. Risulta quindi
38
CAPITOLO 6.
METODO THETA
che le dierenze nite vanno bene per problemi semplici che sono una minima parte
delle congurazioni possibili. In particolare l'impossibilita di introdurre i parametri
dei materiali variabili e l'indeterminazione dell'andamento dei campi e quindi di
come fare post-processing spingono a cercare altri metodi che siano accurati ma che
abbiano meno limitazioni.
Capitolo 7
ELEMENTI FINITI (FEM)
Abbiamo visto come il metodo delle dierenze nite abbia dei limiti nella risoluzione delle equazioni alle derivate parziali(PDE). Un metodo piu generale che lascia
molta piu liberta nella struttura delle equazioni e sulle caratteristiche dei materiali
e il metodo degli Elementi Finiti. Inoltre questo metodo e molto pratico per l'imposizione delle condizioni i Dirichelet, Noimann e d'interfaccia. La spiegazione e
l'implementazione del metodo al calcolatore sono complesse, ma la maggior parte
dei programmi commerciali di simulazione sono basati su questo metodo. Mentre
nel metodo delle dierenze nite si conosceva la soluzione solo nei nodi e se si voleva
un punto intermedio si doveva calcolarlo a posteriori nella fase di post-processing,
nel metodo degli elementi niti come varia la soluzione tra i nodi viene denita
all'inizio.
7.1
Considerazioni domino
Il dominio di forma qualunque viene discretizzato in elementi(elementi niti) in
linea di principio di qualunque forma, ma in realta ci si limita al segmento per 1D,
triangoli e/o quadrilateri in 2D ed esaedri, tetraedi e prismi a base triangolare in
3D.
La reticolazione deve soddisfare certi criteri
l'unione di tutti gli elementi deve coprire tutto il dominio gli elementi non devono sovrapporsi
devono toccarsi vertice con vertice, lato con lato, faccia con faccia
gli elementi non devono per forza essere uguali
in questo modo ottengo il reticolo o mesh e le incognite sono posizionate ai nodi.
7.2
Funzioni Interpolanti
Come detto in precedenza il metodo si basa sulla denizione a priori dell'andamento
della soluzione tra un dodo e l'altro. Per esempio impongo che sia lineare in ogni
elemento. Questo non basta perche se ad esempio abbiamo il potenziale V lineare
in ogni elemento ma non imponiamo che la soluzione sia continua non riusciremo a
fare le derivate e quindi non sarebbe possibile calcolare il campo elettrico (g. 7.1).
Prendiamo l'elemento [e] che ha agli estremi il nodo i e il nodo j e supponiamo di
39
40
CAPITOLO 7.
ELEMENTI FINITI (FEM)
Figura 7.1: Continuita del Campo
conoscere V (xi) e V (xj ) e prendiamo quella funzione lineare che vale 1 nel nodo i
e 0 nel nodo j. Questa e
x xj
y=
x x
i
j
Questa funzione del 1° ordine e detta interpolante lineare Lagrangiana.
Chiamiamo Ni la funzione che vale 1 nel nodo in cui e centrata e 0 nei nodi a destra
7.3: Funzione Intepolante su base
Figura 7.2: Funzione Intepolante generale Figura
elemento
e a sinistra. Tale funzione quindi e denita su tutto il dominio e vale zero fuori
dagli elementi e ed f e varia linearmente al loro interno. L'insieme degli elementi
che convergono in un nodo si chiama area di supporto e si indica con i. (g. 7.2)
Ni =
2
X
k=1
Niek
L'andamento del potenziale nell'elemento risulta allora essere dato dalla somma di
due pezzi di funzione interpolante dei nodi vicini:
V e = Nie (x) Vi + Nje (x) Vj
Applicando il ragionamento a tutto il dominio si ottiene:
V (x) =
ne
X
k=1
Vke =
ne X
2
X
k=1 j =1
Njk Vj
(7.1)
41
Ogni potenziale compare due volte, una a moltiplicare l'interpolante a destra e
l'altra a sinista quindi la 7.1 puo essere scritta in questa forma:
V (x) =
N
X
k=1
Ni Vi
Questa funzione e lineare a tratti e continua. Il campo elettrico risulta allora essere:
E (x) = rV (x) = r
N
X
k=1
!
Ni Vi
=
N
X
[r(NiVi)] =
k=1
N
X
[(rNi)Vi]
k=1
Come mostrato in gura 7.4 il campo elettrico risulta essere costante a tratti o
costante a piastrella. Nel caso 2D il potenziale e:
Figura 7.4: Andamento del campo elettrico
V (x; y) =
e il campo elettrico:
N
X
j =1
E (x; y) = rV
Vj Nj (x; y)
=
N
X
j =1
Vj rNj
Se li elementi sono dei triangoli l'interpolanti sono della forma a + bx + cy se lineare e
ax2 +by2 +cx+dy +exy +f se di secondo grado. Se gli elementi fossero dei quarilateri
l'interpolante sarebbe del tipo a + bx + cy + dxy che e un polinomio incompleto
che e piu che lineare ma non e quadratico. Se prendiamo l'interpolante lineare
Ni = a + bx + cy per trovare i coecienti basta imporre:
8
< a + bxi + cyi = 1
a + bxj + cyj = 0
(7.2)
:
a + bxk + cyk = 0
e quindi sono di facile determinazione. Lo stesso principio si puo applicare all'intepolante lagrangiana nel caso 3D: Ni = a + bx + cy + dz.
42
CAPITOLO 7.
Figura 7.5: Interpolante Lineare
7.3
ELEMENTI FINITI (FEM)
Figura 7.6: Interpolante Lineare (nodi
meta lato)
Condizioni d’interfaccia
Se consideriamo il caso elettrostatico sappiamo che all'interfaccia si conserva la
componente tangente del campo. La domanda da porsi e come si ripercuote questo
fatto sico nella mia implementazione al calcolatore.
E = rV
Et = E t = rV t = @V
(7.3)
@t
1 = @V2 ) @V1 = @V2
Et 1 = Et 2 ) @V
@t1
@t2
@t
@t
Consideriamo gli elementi che non attraversino la linea di interfaccia.
Ne risulta che avendo scelto di rappresentare il potenziale V continuo, la proprieta di mantenimento di Et all'interfaccia viene soddisfatta qualunque sia la scelta di interpolante. Si puo inoltre facilmente dedurre che non e necessario che gli
elementi non attraversino l'interfaccia.
7.4
Risoluzione con il metodo Variazionale
Per la risoluzione sono possibili due metodi: uno variazionale basato su considerazioni puramente siche e un altro puramente matematico.
Consideriamo dapprima l'approccio variazionale e consideriamo una regione 1di spazio in cui conosciamo = (x; y). Consideriamo la densita di energia w = 2 jE j2 .
Integrando sul volume:
Z
Z
1 jE j2dv
wdv =
2
Z
1 j rV j2 dv = Z 1 rV rV dv
2
2
Se ora approssimiamo l'energia sfruttando le intepolanti:
!
!
Z
N
N
X
1 r X
2 n=1 NiVi r n=1 NiVi dv
1
W=
2
Z
cioe
N
X
(rNi)Vi n=1
W
!
N
X
(rNi)Vi
n=1
= W (V1; V2; :::; VN )
!
dv
43
Figura 7.7: Interpolante Lineare 2D
Figura 7.8: Dettaglio Interpolante 2D
Sapendo che al'equilibrio l'energia e minima:
@W
@Vi
= 0 8i = 1; :::; N
Ottengo cos un sistema con tante equazioni quante incognite. Se rendiamo la
k-esima equazione:
Z
@
1 (rN1V1 + ::: + rNk Vk + ::: + rNN VN ) (rN1 V1 + ::: + rNk Vk + ::: + rNN VN ) dV =
@W
=
@Vk @Vk 2
!
N
N Z
X
X
1
= 2 2
rNi Vi rNk dV =
rNi rNk dV Vk = 0
i=1
i=1
Il termine R rNirNj dV che indichiamo con Ki;j e il coeciente j-esimo che va
a moltiplicare Vj nella riga i-esima. Per i = j ho un coeciente positivo, infatti ho
(rNk )2 e al di fuori dell'area di supporto Ki;j = 0 cioe Ki;j 6= 0 solo se j i.
Il metodo funziona meglio quando i triangoli sono equilateri e quindi mediamente
un'area di supporto e formata da circa 6 elementi e ha 7 nodi. Per cui ho 7 coecienti non nulli in ogni riga. La matrice risulta essere sparsa, simmetrica e denita
positiva.
Z
7.4.1
Calcolo dei coefficienti
K
i;j
Se consideriamo costante all'interno di ogni elemento e prendiamo gli N
i elementi
dell'area i supporto i coecienti Ki;j risultano essere:
Ki;j =
N
i Z
X
k=1
rNie rNje dV
44
CAPITOLO 7.
ELEMENTI FINITI (FEM)
Figura 7.9: Andamento campo 2D
Ogni integrale rappresenta il contributo Ki;je di ogni singolo elemento dell'area di
supporto al coeciente Ki; j . Se consideriamo le interpolanti lineari abbiamo:
Ni2 = ai + bi x + ci y
(7.4)
e
rNi = (bi ; ci )
Nj2 = aj + bj x + cj y
rNje = (bj ; cj )
Da cui risulta
e
Ki;j
= 2(bibj + cicj )Ae
Se gli integrali non sono semplici si possono risolvere comunque abbastanza agevolmente attraverso dei metodi numerici (formule di Gauss).
La logica di costruzione degli elementi e molto semplice:
1. Calcolo Ki;je che e una matrice 3x3
2. Vado ad aggiungere i coecienti nelle posizioni opportune della matrice globale
7.4.2
Condizioni al contorno
Una volta ottenuto il sistema globale [K ]fV g = f0g per imporre le condizioni
di Dirichlet basta procedere come per il metodo delle dierenze nite. Spiano
la riga e la colonna, metto un 1 in diagonale e a termine noto metto il valore
nella riga corrispondente e vado ad aggiungere i termini moltiplicati per il
coeciente negli altri nodi dell'area di supporto.
Per quanto riguarda i bordi di Noimann non posso dire niente per le scelta
fatte all'inizio. Per poterlo considerare avrei dovuto introdurre un'energia di
bordo.
45
Figura 7.10: Interpolante 2D (nodi di meta lato)
7.5
Risoluzione con il metodo dei Residui Pesati
Consideriamo il campo elettrico per focalizzare le idee e partiamo dalle condizioni
di interfaccia che sappiamo essere: Dn1 = Dn1 e Et1 = Et1 . Introucendo i legami
tra D ed E , D 1 = 1 E1 e D 2 = 2 E2, ed elaborando un po risulta quindi che:
Dn1 = Dn2
D 1 n 1 = D 2 n 2
D 1 n 1 + D 2 n 2 = 0
n 1 = n 2 = n
D 1 n D 1 n = 0
1 E1 n 2 E2 n = 0
1 rV1 n + 2 rV2 n = 0
@V
@V
(7.5)
1 1 2 2 = 0
@n
@n
Quindi nel metodo dovro imporre questa ultima condizione perche la soluzione
rispetti i vincoli della continuita. Introduciamo ora L(V ) = 0 che e un'operatore
dierenziale in termini di V (es. L = rr) in una regione in cui sono denite le
condizioni al contorno. Esiste un teorema che mi dice che ho un problema associato
che ha la stessa soluzione:
Z
wL(V )dV ol = 0 8w
in cui w e una generica funzione. Se conosco V, L(V ) = 0 e quindi l'integrale e
identicamente nullo ovvero il problema ha soluzione 8w se L(V ) = 0.
46
CAPITOLO 7.
ELEMENTI FINITI (FEM)
Figura 7.11: Interfaccia tra elementi con costante dielettrica diversa
Figura 7.12: Interfaccia Reticolata
Supponiamo che il nostro poteziale V sia una combinazione lineare di opportuni
potenziali base V b cioe:
1
X
V = i Vib
i=1
Numericamente non posso cercare tra innite funzioni base, quindi dovro scegliere
delle funzioni che siano correlate con il potenziale che vado a cercare. In particolare
devo cercare delle V b che siano facili da sommare e moltiplicare per scalari, come
ad esempio i polinomi ed inoltre per garantire la conservazione
di Et , V C 0 e lecito
PM
cercare i potenziali tra le funzioni continue. V~ = i=1 iNi(x; y) Le interpolanti
Lagrangiane (Ni) sono dette funzioni di forma (shape fuction). Queste funzioni sono
polinomi continui che non si estendono ovunque ma solo localmente. I coecienti
i sono i potenziali nei nodi Vi . M rappresenta il numero delle aree di supporto
che coincide con il numero di nodi n. Ovviamente non posso provare l'integrale con
innite funzioni wk e quindi perdo l'equivalenza esatta. Risulta quindi
Z
wk L(V~ )dV k = 1; :::; R
Le wk sono dette funzioni peso (weight function) o funzioni test. Se prendo R = n
ho tante equazioni quante incognite e se prendo wk = Nk il sistema risultante e
simmetrico(Galerkin). Il metodo si chiama dei residui pesati perhe uso V~ e l'inte-
47
Figura 7.13: Condizione di Continuita
grale non e generalmente nullo e L(V~ ) e detto residuo che vieneR moltiplicato per
una funzione test(peso). Riassumendo se conosco
V , L(V ) = 0 e wL(V )dV = 0.
Se conosco V in modo approssimato (V~ ), R
wiL(V~ )dV = Ri(V1; :::; Vn). Ho tante
w quanti i nodi e all'i-esima wi ho l'i-esimo residuo. Una volta ssati wi ed Ni il
residuo dipende solo da V~ e quindi dipende solo dai potenziali nei nodi:
V~
=
N
X
j =1
Vj Nj
Lavoriamo ad i ssato e poniamo
1. wi = Ni
2. r rV = ! r ZrV + = 0
Ni (r rV + )dV = 0
Z
Z
= NidV
Ora se V e lineare rV e una funzione costante a tratti e non posso fare la divergenza. Esistono comunque dei polinomi interpolanti che si raccordano senza
cuspidi. Applichiamo ora la Formula di Green (che e l'equivalente in + dimensioni
dell'integrazione per parti)
Z
Z
Z
Ni dV
(7.6)
rNi rV dV + Ni rV n d@V =
|
{z
Ni r rV dV
}
A
| @
{z
B
}
|
Analizziamo singolarmente i pezzi della 7.6:
1. A
Z
rNi rV dV =
Z
rNi N
X
N Z
X
j =1
j =1
(Vj rNj )dV =
{z
C
}
rNi Vj rNj dV =
8
>
>
>Z
N <
X
>
:
j =1 >
>| Quindi il primo termine mi da origine ai coecienti da aggiungere nella
matrice globale.
9
>
>
>
=
rNi rNj dV > Vj
{z
Kij
>
}>
;
48
CAPITOLO 7.
2. C
fi =
Z
Ni dV
=
X Z
ELEMENTI FINITI (FEM)
Ni dV
i | {z
fie
Termine noto della i-esima equazione.
}
Figura 7.14: Elemento forzante
2
4
frk =
Z
Nr dV
f1k
f2k
f3k
3
(7.7)
5
r=1,2,3 ! TERMINE NOTO
Ho quindi il solito sistema
[K ]fV g = ff g
3. B Questo termine dovrebbe essere 0 perche la matrice [K] e la stessa trovata
con il metodo variazionale e se = 0, f = 0 e quindi il termine B non deve
dare contributo. Possiamo individuare 3 casi:
(a) i@ D Le condizioni di Dirichelet vengono imposte come al solito e quindi
questo termine non e presente nell'equazione.
(b) i@ N Se ho le condizioni di Newmann omogeneo e 0, altrimenti l'integrale e noto e lo aggiungo a termine noto.
(c) i
L'integrale di tipo B lo faro su base elemento:
Figura 7.15: Punto i interno
Z
@
Ni @V
d@
@n
Sul bordo (- viola) Ni e nullo e i contributi sono nulli. I lati a raggiera
sono percorsi una volta in un senso e poi nell'altro.
Z
1
Ni 1
@V1
d@ +
@n
Z
2
Ni 2
@V2
d@
@n
49
Figura 7.17: Lato elemento
Figura 7.16: Lato elemento
Ni al bordo e uguale da entrambe le parti e percorro il boro in verso
opposto:
0
Z
1
B
1
Ni B
B
1
@
|
@V1
@V
2
@n {z 2 @n}
C
C
C d@
A
0 se voglio la conservazione di Dn
Quindi non calcolo l'integrale. Concludendo per via numerica non si
riesce ad imporre in modo forte una tra queste cose:
1. o non riesco ad imporre Et
2. o non riesco ad imporre Dn
3. o non riesco ad imporre la relazione costitutiva
Essendo la soluzione approssimata riesco ad imporre solo due condizioni in modo
forte, mentre la terza riesco ad imporla in media. Se i lati sono corti Dn riesco a
conservarlo meglio.
=
7.6
Caso Elettrostatico 2D/3D e Magnetostatico
2D
Nel caso di campo elettrostatico abbiamo r rV = e la continuita di V implica
la conservazione di Et in modo forte. Inoltre la conservazione di Dn e imposta in
Figura 7.18: Campo elettrico
media in quanto pongo l'integrale R
Ni @V
d@ = 0
@n
Per il campo magnetico 2D possiamo utilizzare il potenziale salare e abbiamo
r rAz = Jz e la continuita di Az implica la conservazione di Bn in modo forte.
Figura 7.19: Campo magnetico
Per il campo magnetico abbiamo:
Ht1 = Ht2
50
CAPITOLO 7.
ELEMENTI FINITI (FEM)
1 Bt1 = 2 Bt2
1 (r A1 ) t1 = 2 (r A2 ) t2
1 rA1 n1 = 2 rA2 n2 con n1 = n2
@A
@A
1 1 + 2 2 = 0
@n
@n
Se impongo questa condizione l'integrale
Z
@
Ni @Az
d@ = 0
@n
Ho la conservazione della componente tangente del campo in modo debole.
Per il caso elettrostatico 3D concettualmente non cambia niente, solo che ho piu
non zeri per riga.
7.7
Caso Magnetostatico 3D con il potenziale scalare
Concettualmente cambia poco rispetto a caso elettrostatico. Se il potenziale non
fosse scalare ho un problema 3D e devo usare i potenziale vettore A(Ax ; Ay ; Az ).
Per alcuni problemi posso considerare 3 potenziali scalari, pero cos facendo Ax , Ay
e Az sono continui e quindi anche A e continuo e questo non e sempre vero, solo At
deve essere continuo. Si usano gli elementi edge(lato) e quindi il potenziale vettore
viene associato al lato e la componente tangente vale 1 su un alto e 0 sugli altri.
Anche le interpolanti sono su base lato.
7.8
Caso magnetico quasi stazionario
Supponiamo di avere forzanti sinosuidali e materiali lineari, e usiamo la notazione
fasoriale.
r rA_ z + j!A_ z = J_
Z
Ni ( r rA_ z + j!A_ z J_)d
= 0
Trascurando il termine di bordo che so come trattare
Z
Z
Z
_
_
rNi rAz d
+ j!Ni Az d
= Ni Jz d
A_ z =
A_ z =
N Z
X
N
X
j =1
Nj A_ zj
rNi rNj d
A_ zj +
j =1 |
{z
Kij
}
N
X
j =1
j!
Z
|
Ni Nj d
A_ zj = f_i
{z
Sij
}
Questo da origine al sistema algebrico lineare a coecienti complessi
[K + j!S ]fA_ z g = ff_g
Consideriamo adesso il caso in cui la forzante Jz non sia sinosuidale. I questo
caso non posso piu usare i fasori ma devo usare le grandezze istantanee.
Z
Ni
z
r rAz + @A
Jz dV = 0
@t
51
Z
Z
Z
z
dV =
Ni Jz dV
rNi rAz dV + Ni @A
@t
X
X
@X
@A
z
sapendo che Az = Nj Azj e quindi @A
=
Nj Azj = Nj zj :
@t
@t j
@t
j
8
>
>
>
X <Z
j
>
>
>
:|
9
>
>
>
=
8
>
>
>
X <Z
>
}>
;
>
>
>
:|
rNi rNj dV > Azj +
{z
kij
j
9
>
>
>
=
@Aj
@t
>
}>
Ni Nj d>
{z
sij
;
= N| {ziJz}
fi
Si ottiene cos il seguente sistema di equazioni algebrico-dierenziali:
@Az
[K ]fAz g + [S ] @t = ff g
7.9
Problemi non lineari
Una classe di problemi che non si riuscivano a risolvere con le dierenze nite era
quella con caratteristiche dei materiali variabili da punto a punto. Caso tipico e la
caratteristica di un materiale ferromagnetico . Essendo il campo diverso da punto
a punto
a permeabilita magnetica cambia. I coecienti della matrice [K] erano dati
da:R rNi |{z}
rNj dV . = f (H ), H = f (B ), B = r A, quindi la matrice [K]
1
dipende da A.
7.9.1
Problema magnetico non lineare
Per la risoluzione il metodo piu semplice e quello della semplice iterazione. Si sceglie il valore di iniziale ( = ini), si calcola la matrice [K], si risolve il sistema
trovando A, poi calcolo jB j in ogni elemento, entro nella caratteristica B/H e trovo
jH j di elemento e ho cos le nuove permeabilita (1 ). Ora se sono nella parte di caratteristica lineare ini = 1 e quindi ho nito. Molto spesso pero per una miglior
resa dei materiali si lavora vicino al ginocchio e quindi potrei andare a lavorare in
saturazione. In questo caso ini 6= 1. In questo caso devo ripetere l'iterazione
no a quando non cambia(o cambia con un errore piccolo). Il problema nasce
pero dal fatto che non sono sicuro della convergenza dell'algoritmo (molte volte non
converge o se converge li fa lentamente).
52
CAPITOLO 7.
ELEMENTI FINITI (FEM)
xk+1 = f (xk ) ha soluzione quando xn+1 =
f (xn ) = xn . Se ad ogni valore la distanza tra xn+1 e xn e sempre minore allora
Teorema 6 Un algoritmo iterativo
f e una contrazione. Se f e una contrazione allora l'algoritmo converge.
7.9.2
Tecnica del rilasamento
Se sono in saturazione ho k+1 = k + k in cui k e un valore molto grande
e questo mi porta a notevoli oscillazioni prima di arrivare al valore esatto di . Se
avessi k+1 = k + k con << 1 riuscirei a smorzare l'andamento oscillatorio.
Bisogna stare attenti a non generare pero convergenze sbagliate. Si usa allora la
tecnica del rilassamento adatttivo: all'inizio ho << 1 e piu mi avvicino alla
soluzione, piu ! 1. La contropartita e che mi si generano molte iterazioni.
[K (A)] fAg f = 0 e un problema di ricerca di zero multidimensionale. A questo
sistema si puo applicare il metodo di Newton-Rapson che se converge lo fa molto
rapidamente, ma e piu complicato da implementare. Se non dovesse convergere si
applica una tecnica di rilassamento.
Per la risoluzione abbiamo considerato (A), ma questo non e l'unico modo con
cui procedere. Consideriamo B = 0H + M (H )
Figura 7.20: Magnetizzazione
z
N onlineare
B = |{z}
lH
}|
{
+M (H )
lineare
r H = J
in 2D ho quindi:
r l B M (H ) = J
r l r A = J + r M (H )
[K ]fAg = ff g + fm(A)g
Il sistema e sicuramente convergente e ho a possibilita di scegliere l. SE prendo
+
l = ini 0 ho la massima velocita di convergenza.
2
7.10
Reticolazione
Per progettare una macchina bisogna fare vari passaggi:
1. problema termico
2. problema meccanico
53
3. problema elettromagnetico
4. ...
Bisogna valutare a che punto inuenza la parte elettromagnetica e se e importante.
Una cosa comune a tutte le progettazioni e il CAD al quale si appoggiano
1. simulazioni
2. manifattura
3. costi (ferro, struttura, ...)
Pero il CAD ha una serie di problematiche:
1. non esiste un modello che va bene per tutte queste problematiche (per ogni
ambito ho un dettaglio diverso). A seconda del tipo di cosa che si deve fare il
CAD ha troppa descrizione: ! conviene semplicare ! posso non modellare
certe parti ! tutto cio che viene trascurato semplica la simulazione numerica
2. Esistono tanti CAD, ciascuno avente un formato diverso (.dwg,...) ed e dicile
che il simulatore elettromagnetico sia in grado di riconoscerli tutti
3. Nella simulazione elettromagnetica la parte geometrica e solo una piccola parte
in quanto sono molti importanti le caratteristiche dei materiali nelle varie
regioni. Inoltre bisogna progettare il sistema di reticolazione e di risoluzione
o con il metodo delle dierenze niti o co gli elementi niti. Quindi dato il
disegno in CAD bisogna aggiungere le parti mancanti e togliere gli elementi
di troppo. Risulta piu conveniente rifare il modello elettromagnetico senza
far riferimento al CAD.
7.10.1
Reticolazione in 2D
Figura 7.21: Reticolazione 2D
Considero una poligonale che rappresenti il bordo del dominio. Il poligono lo
suddivido in triangoli per quanto possibile equilateri e di dimensioni opportune in
base al problema, cioe piu piccoli dove mi interessa conoscere di piu la variazione(nodi totali e dove vanno concentrati), e al tempo di risoluzione.
Ora ci sono vari approcci per la reticolazione:
54
CAPITOLO 7.
ELEMENTI FINITI (FEM)
1. Pilotare la generazione del reticolo all'interno del dominio a partire dall'informazione che assegno al bordo. Si fa la reticolazione iniziale: valido per gli
F.E.M., ma di forma diversa e mette vicini triangoli piccoli e grandi. Viene eettuata in modo automatico attraverso un algoritmo chiamato EARCLIPPING:
(a) si prende un nodo di partenza S (Seed-Node) a caso
(b) si prendono i due nodi successivi della catena (s+1, s+2) e si vede se e
possibile connettere s con s+2. La connessone non si puo eettuare se
s e s+2 giacciono sulla stessa retta(non si genera un triangolo) o se la
connessione interseca lati di bordo o esce dal dominio (g. 1b). Devo
inoltre valutare se e possibile fare la connessione garantendo dei margini
di sicurezza, ad esempio valutando la distanza tra linea e bordo (g.
7.22).
Figura 7.22: Margini di sicurezza
(c) se la connessione e possibile vado avanti altrimenti sposto S in modo da
avere una connessione.
Questo metodo genera elementi con aree molto dierenti. In aritmetica esatta
e sempre possibile nire la reticolazione, nei calcolatori devo garantire dei
margini di sicurezza e se lascio delle aree vuote devo ripulire tutto e partire
da un diverso seed-node.
2. Il reticolo cos generato e formato da elementi di aree molto dierenti e quindi
e necessario cercare di passare a triangoli equilateri attraverso un'equilibratura
dei nodi interni. Esistono vari metodi per eseguire questo passaggio:
(a) NODE-INSERCTION (g: 7.23): si prende una coppia di elementi che
hanno i comune un lato e si confrontano le aree. Se sono molto diverse
cerco di dividere l'elemento piu grande in piu sotto-elementi inserendo
un nodo all'interno dell'area. es.
(b) DELAUNAY-SWAP (g: 7.24): si scambia la diagonale, che e un lato
comune a due elementi. Si puo fare solo se ho un quadrilatero convesso.
Si valuta quale scambio eettuare cercando di minimizzare il massimo
55
Figura 7.23: Node Inserction
angolo. In gura si scambia il alto luno verde con quello arancione.
(max < max )
Figura 7.24: Delaunay-Swap
Entrambi i metodi lavoro sull'elemento senza inuenzare gli altri e sono equivalenti in 2D, mentre in 3D solitamente si lavora sugli angoli. Il Node-Insertion
e il Delaunay-Swap possono essere applicati in cascata.
3. LAPLACE-SMOOTHING: qusto metodo ceca di riposizonare ogni nodo al
centro della propria area di suppoto.
OSSERVAZIONI:
1. Questo non e l'unico modo per reticolare. Esiste anche l'ADVANCING FRONT
che cerca di generare il reticolo parteno dal bordo e facendo implodere il
dominio. Quando le pareti collidono si applica un algoritmo per riadattarle.
2. La reticolazione in 3D e molto dicile. Per ogni bordo esterno e come se si
assegnansse automaticamente Newmann omogeneo, qui e come avere un buco
di Newmann perche il programma vede cos:
Figura 7.25: Reticolazione 3D
3. I triangoli devono essere il piu possibile equilateri in quanto piu gli elementi
sono diversi, piu la matrice [K ] e mal condizionata, cioe i suoi autovalori si
diversicano molto(il modulo i quello di valore minimo e molto piu piccolo
del modulo di quello massimo) e questo rende la risoluzione del sistema piu
complicata.
4. Se ho delle correnti parassite ho dei campi che variano rapidamente in zone
ristrette in modo non lineare, quindi non posso mettere un solo elemento e
dovrei mettere tanti piccoli triangolini equilateri. Ma cos facendo avrei una
marea di elementi e quindi una mesh complessa e un notevole costo computazionale. Si usano, allora, degli elementi allungati anche se questo comporta
un mal condizionamento della matrice [K ].
56
CAPITOLO 7.
ELEMENTI FINITI (FEM)
Elenco delle figure
1.1
1.2
1.3
1.4
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
2.10
2.11
2.12
2.13
2.14
3.1
3.2
3.3
3.4
3.5
4.1
4.2
5.1
5.2
5.3
5.4
5.5
5.6
5.7
5.8
5.9
6.1
6.2
7.1
Materiale non lineare . . . . . . . . . . . . . . . . . . . . . . . . . . .
.......................................
Discretizzazione di una funzione . . . . . . . . . . . . . . . . . . . .
Discretizzazione di un dominio . . . . . . . . . . . . . . . . . . . . .
Circuitazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Potenziale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Dominio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Linea di usso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.......................................
Andamento campo (a) . . . . . . . . . . . . . . . . . . . . . . . . . .
Andamento campo (b) . . . . . . . . . . . . . . . . . . . . . . . . . .
Andamento campo . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Relazione Rotore - Gradiente . . . . . . . . . . . . . . . . . . . . . .
Andamento qualitativo dei campi . . . . . . . . . . . . . . . . . . . .
Problema iniziale . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Problema semplicato . . . . . . . . . . . . . . . . . . . . . . . . . .
Problema iniziale . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Problema semplicato . . . . . . . . . . . . . . . . . . . . . . . . . .
Fenomeno cancellazione . . . . . . . . . . . . . . . . . . . . . . . . .
Fenomeno non sico . . . . . . . . . . . . . . . . . . . . . . . . . . .
Regiore a connessione lineare semplice . . . . . . . . . . . . . . . . .
Regione non a connessione lineare semplice . . . . . . . . . . . . . .
Casi di utilizzo dei potenziali parzile e totale . . . . . . . . . . . . .
Corrente Indotta . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Eetto pelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Dominio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Reticolo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bordo di Dirichelet . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bordo di Newmann . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bordo di dominio non quadrato . . . . . . . . . . . . . . . . . . . . .
Propagazione Reticolo . . . . . . . . . . . . . . . . . . . . . . . . . .
Interruzione Linee . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Inacuratezza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Instabilita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Andamento Campo . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.......................................
Continuita del Campo . . . . . . . . . . . . . . . . . . . . . . . . . .
57
3
4
4
4
7
7
9
9
11
11
12
12
13
13
14
14
14
14
16
17
17
17
18
19
19
23
24
26
27
28
29
29
31
31
37
37
40
58
ELENCO DELLE FIGURE
7.2
7.3
7.4
7.5
7.6
7.7
7.8
7.9
7.10
7.11
7.12
7.13
7.14
7.15
7.16
7.17
7.18
7.19
7.20
7.21
7.22
7.23
7.24
7.25
Funzione Intepolante generale . . . . . . . . . . . . . . . . . . . . . .
Funzione Intepolante su base elemento . . . . . . . . . . . . . . . . .
Andamento del campo elettrico . . . . . . . . . . . . . . . . . . . . .
Interpolante Lineare . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interpolante Lineare (nodi meta lato) . . . . . . . . . . . . . . . . .
Interpolante Lineare 2D . . . . . . . . . . . . . . . . . . . . . . . . .
Dettaglio Interpolante 2D . . . . . . . . . . . . . . . . . . . . . . . .
Andamento campo 2D . . . . . . . . . . . . . . . . . . . . . . . . . .
Interpolante 2D (nodi di meta lato) . . . . . . . . . . . . . . . . . . .
Interfaccia tra elementi con costante dielettrica diversa . . . . . . . .
Interfaccia Reticolata . . . . . . . . . . . . . . . . . . . . . . . . . . .
Condizione di Continuita . . . . . . . . . . . . . . . . . . . . . . . .
Elemento forzante . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Punto i interno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Lato elemento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Lato elemento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Campo elettrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Campo magnetico . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Magnetizzazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Reticolazione 2D . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Margini di sicurezza . . . . . . . . . . . . . . . . . . . . . . . . . . .
Node Inserction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Delaunay-Swap . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Reticolazione 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
40
40
41
42
42
43
43
44
45
46
46
47
48
48
49
49
49
49
52
53
54
55
55
55